Настоящее изобретение относится к устройству управления краном для управления подъемным механизмом крана. В частности, в этом отношении электронное устройство управления краном, которое определяет сигналы управления для подъемного механизма крана из входных сигналов, введенных оператором посредством элементов ввода, в частности посредством рычагов управления. В качестве альтернативы входные сигналы также могут формироваться системой автоматизации.
При поднятии груза краном в дополнение к статическим нагрузкам, которые действуют на трос и на кран вследствие веса груза, возникают дополнительные динамические нагрузки при перемещении груза. Для того чтобы к тому же быть способной принимать эти динамические нагрузки, конструкция крана должна быть сделана соответственно более устойчивой или должна быть соответственно уменьшена максимальная статическая нагрузка.
В известных устройствах управления краном оператор определяет скорость подъемного механизма вручную посредством приведения в действие рычагов управления. Поэтому при соответствующей операции могут возникать существенные динамические нагрузки, которые должны учитываться соответственно устойчивой (а значит дорогостоящей) конструкцией крана.
Задача настоящего изобретения состоит в том, чтобы предложить усовершенствованное устройство управления краном.
Данная задача решается, в соответствии с изобретением, устройством управления краном согласно пункту 1 формулы изобретения. Настоящее изобретение, таким образом, предлагает устройство управления краном для управления подъемным механизмом крана, который учитывает динамику колебаний на основании упругости подъемного троса при управлении подъемным механизмом и уменьшает или демпфирует их посредством надлежащего управления подъемным механизмом. В частности, в этом отношении учитывается динамика колебаний системы троса и груза. Кроме того, преимущественно также должны учитываться конструкция подъемного механизма и/или крана. Таким образом, можно снижать динамические нагрузки, которые действуют на трос и конструкцию крана, посредством использования устройства управления краном в соответствии с изобретением. Конструкция крана, таким образом, может быть построена соответственно более легкой или может эксплуатироваться с более высокими статическими нагрузками. Устройство управления краном в соответствии с изобретением в этом отношении, в частности, может ограничивать подъемную силу, действующую на конструкцию крана максимальным разрешенным значением, учитывая динамику колебаний системы подъемного механизма, троса и груза.
Устройство управления краном в соответствии с изобретением преимущественно включает в себя операцию подавления колебаний, в которой учитывается динамика колебаний на основании упругости подъемного троса, наряду с тем, что возможные перемещения опорного участка, на который опирается конструкция крана, не учитываются при управлении подъемным механизмом. Поэтому управление допускает неподвижный опорный участок при операции подавления колебаний. Управление в соответствии с изобретением поэтому должно учитывать только колебания, которые возникают вследствие подъемного троса и/или подъемного механизма, и/или конструкции крана. Перемещения опорного участка, например такие, которые возникают с плавучим краном вследствие движения волн, в противоположность остаются вне рассмотрения при операции подавления колебаний. Устройство управления краном, таким образом, может быть сделано существенно более простым.
Устройство управления краном в соответствии с изобретением в этом отношении может использоваться на кране, конструкция которого фактически опирается на неподвижный опорный участок, в частности на землю, во время подъема. Однако устройство управления краном в соответствии с изобретением также может использоваться с плавучим краном, но не учитывает перемещения плавучего корпуса при операции подавления колебаний. Если устройство управления краном имеет режим работы с активной компенсацией вертикальной качки, операция подавления колебаний, таким образом, происходит соответствующим образом, без какой бы то ни было одновременной операции активной компенсации вертикальной качки.
Дополнительно способ в соответствии с изобретением преимущественно используется с транспортируемыми и/или самоходными кранами. Кран в этом отношении преимущественно имеет средство опоры, посредством которого он может опираться в разных местоположениях подъема. Дополнительно способ преимущественно используется с портовыми кранами, в частности с самоходными портовыми кранами, с гусеничными кранами, с самоходными кранами и т.д.
В этом отношении подъемный механизм крана в соответствии с изобретением может быть с гидроприводом. В качестве альтернативы привод также возможен посредством электродвигателя.
Устройство управления краном в соответствии с изобретением в этом отношении преимущественно определяет сигналы управления для подъемного механизма крана из входных сигналов, введенных оператором посредством элементов ввода, в частности посредством рычагов управления, в зависимости от динамики колебаний системы подъемного механизма, троса и груза, которые основаны на упругости подъемного троса, учитываемой при определении сигналов управления для ограничения динамических сил, действующих на трос и на конструкцию крана. В качестве альтернативы или дополнительно устройство управления краном может содержать систему автоматизации, которая предварительно устанавливает требуемое подъемное перемещение.
В этом отношении скорость механизированного перемещения подъемного механизма преимущественно ограничивается максимальной разрешенной скоростью механизированного перемещения для ограничения превышений в по меньшей мере одной рабочей фазе, в частности, во время подъема и/или постановки груза. Максимальная разрешенная скорость механизированного перемещения в этом отношении также может быть равна нулю, так что устройство управления краном останавливает подъемный механизм. Однако устройство управления краном преимущественно ограничивает скорость механизированного перемещения скоростью, большей чем ноль, так что подъемное перемещение не прерывается.
Настоящее изобретение дает возможность ограничивать превышение подъемной силы выше статической нагрузки определенной величиной. Превышения в этом отношении преимущественно могут ограничиваться постоянным коэффициентом максимальной нагрузки, зависящим от положения стрелы.
Учет динамики колебаний или ограничение скорости механизированного перемещения в этом отношении преимущественно происходит по меньшей мере на тех рабочих фазах, которые особенно значимы для динамических нагрузок системы подъемной лебедки, подъемного троса и груза. В частности, в этом отношении может быть обеспечено, чтобы скорость механизированного перемещения ограничивалась только на отдельных рабочих фазах, но была разблокирована в других рабочих фазах, для того чтобы излишне не ограничивать оператора. В частности, в этом отношении может обеспечиваться, чтобы скорость механизированного перемещения ограничивалась только во время подъема и/или постановки груза, а в ином случае была разблокирована.
Более того, преимущественно обеспечивается, чтобы скорость механизированного перемещения подъемного механизма определялась, опираясь на входные сигналы, до тех пор, пока скорость механизированного перемещения находится ниже максимально разрешенной скорости механизированного перемещения. Только если скорость механизированного перемещения, определенная по входным сигналам оператора, была выше максимальной разрешенной скорости механизированного перемещения, скорость механизированного перемещения ограничивается этой максимальной разрешенной скоростью механизированного перемещения. Поэтому до тех пор, пока оператор не превышает максимальную разрешенную скорость механизированного перемещения, он может свободно управлять подъемным механизмом как с известными устройствами управления краном.
Устройство управления краном в этом отношении преимущественно определяет максимальную разрешенную скорость механизированного перемещения подъемного механизма динамически, опираясь на данные крана. Поэтому никакая постоянная максимальная разрешенная скорость механизированного перемещения предварительно не устанавливается, но это скорее определяется в каждом случае в тот момент времени, опираясь на ситуацию. Максимальная разрешенная скорость механизированного перемещения, таким образом, может постоянно приводиться в соответствие соответственной ситуации подъема. Это обладает тем преимуществом, что скорость механизированного перемещения подъемного механизма не должна ограничиваться на излишне большую величину.
В этом отношении вылет стрелы крана преимущественно учитывается в максимально разрешенной скорости механизированного перемещения. Вылет стрелы крана, в свою очередь, определяет максимальную силу, которую может принимать конструкция крана, и, таким образом, максимальные разрешенные динамические силы. Если кран является стрелой, которая может подвергаться изменению уклона вокруг горизонтальной оси изменения уклона, угол уклона стрелы, таким образом, принимается при определении максимальной разрешенной скорости механизированного перемещения.
Дополнительно максимальная разрешенная скорость механизированного перемещения подъемного механизма преимущественным образом определяется в зависимости от подъемной силы, измеренной в тот момент времени. Это дает возможность ограничивать превышение подъемной силы определенным значением максимальной разрешенной статической подъемной силы. Максимальная разрешенная скорость механизированного перемещения преимущественно падает в этом отношении по мере того, как возрастает подъемная сила. Максимальная разрешенная скорость механизированного перемещения, в частности, преимущественно является обратно пропорциональной квадратному корню подъемной силы, измеренной в тот момент времени. Подъемная сила в этом отношении может измеряться с помощью датчика массы груза.
Дополнительно максимальная разрешенная скорость механизированного перемещения подъемного механизма преимущественным образом определяется в зависимости от длины троса. В этом отношении длина троса обладает влиянием на жесткость подъемного троса и, таким образом, на динамические свойства системы подъемной лебедки, троса и груза. В этом отношении длина троса преимущественно определяется посредством измерения перемещения подъемного механизма или с помощью управляющих данных подъемного механизма.
Дополнительно специальные константы, которые зависят от конструкции крана и троса, преимущественным образом принимаются при расчете максимальной разрешенной скорости механизированного перемещения.
В этом отношении максимальная разрешенная скорость механизированного перемещения подъемного механизма преимущественно определяется на основе физической модели, которая описывает динамику колебаний системы подъемного механизма, троса и груза. Таким образом, можно добиваться точного ограничения максимальной разрешенной скорости механизированного перемещения. В дополнение устройство управления краном может проще приспосабливаться к другим моделям кранов.
Поскольку динамические нагрузки крана и троса крана значительно отличаются на разных фазах подъема, устройство управления краном предпочтительно управляется соответственной программой управления соответствием на разных фазах.
Устройство управления краном в соответствии с изобретением поэтому преимущественно содержит систему распознавания ситуаций, опираясь на которую устройство управления краном определяет режим управления. В этом отношении устройство управления краном в соответствии с изобретением, в частности, содержит конечный автомат, который определяет режим управления устройства управления краном, опираясь на систему распознавания ситуаций. В частности, преимущественно он является конечным автоматом, который распознает дискретные события и выполняет соответственные предустановленные программы управления для подъемного механизма в этих состояниях.
Система распознавания ситуаций преимущественно распознает состояние подъема, в котором скорость механизированного перемещения подъемного механизма ограничивается, чтобы избегать превышений. Конечный автомат в этом отношении для этой цели преимущественно имеет состояние подъема, в котором скорость механизированного перемещения подъемного механизма ограничивается для избежания превышений. Наибольшие динамические нагрузки на тросе и на кране возникают при подъеме, так что важно, чтобы скорость механизированного перемещения подъемного механизма ограничивалась в соответствии с изобретением в этой фазе, чтобы избежать превышений.
В этом отношении переход в состояние подъема выполняется, когда система распознавания ситуаций распознает, что груз, лежащий на земле, поднимается. Пока груз лежит на земле, подъемный трос сначала натягивается наматыванием подъемного троса до тех пор, пока груз не отрывается от земли. Во время этой фазы скорость механизированного перемещения подъемного механизма ограничивается для избежания превышений нагрузки после поднятия груза.
В этом отношении система распознавания ситуаций преимущественно распознает состояние подъема по той причине, что наблюдается изменение в измеряемой подъемной силе. В этом отношении производная подъемной силы преимущественно учитывается при распознавании ситуации. В частности, в этом отношении может опрашиваться, превышает ли производная подъемной силы, согласуясь со временем, заданное минимальное значение. Абсолютное значение силы, кроме того, также может учитываться при распознавании ситуации. В этом отношении преимущественно принимается во внимание разность между подъемной силой, измеренной в тот момент времени и последний раз определенной статической подъемной силой, которая определяется только статическим весом груза. В этом отношении может опрашиваться, превышает ли эта разность определенное заданное значение. Поскольку абсолютные значения силы также учитываются, может быть предотвращено то, что обнаруживается состояние подъема, хотя груз свободно висит на крюке, и нет угрозы слишком большого превышения.
Дополнительно система распознавания ситуаций преимущественным образом распознает состояние разблокирования, в котором скорость механизированного перемещения подъемного механизма разблокирована, причем состояние разблокирования преимущественно распознается, когда груз был поднят и теперь свободно висит на тросе крана. Конечный автомат преимущественно имеет для этой цели состояние разблокирования, в котором разблокирована скорость механизированного перемещения подъемного механизма. Это позволяет, чтобы оператор не был ограничен устройством управления краном в соответствии с изобретением в тех рабочих фазах, в которых превышение подъемной силы не должно ожидаться, на этих фазах подъемный механизм предпочтительнее может свободно управляться оператором, без устройства управления краном, ограничивающего скорость механизированного перемещения подъемного механизма.
В этом отношении переход в состояние разблокирования выполняется, когда система распознавания ситуаций распознает, что груз был поднят и теперь свободно висит на тросе крана. В этой ситуации никакая критическая динамика не должна ожидаться, так что оператор теперь может свободно управлять подъемным механизмом.
В этом отношении данные о перемещении подъемного механизма берутся в систему распознавания ситуаций, чтобы распознавать, поднимался ли груз. Система распознавания ситуаций в этом отношении, в частности, определяет по измеренной подъемной силе и по данным о режиме растяжения троса, когда подъемный механизм уже намотал достаточно троса для поднятия груза с земли.
Дополнительно система распознавания ситуаций преимущественным образом распознает состояние постановки, в котором скорость механизированного перемещения подъемного механизма ограничивается, чтобы избежать слишком большого количества троса, излишне размотанного при постановке груза. Для этой цели конечный автомат преимущественно имеет состояние постановки, в котором скорость механизированного перемещения подъемного механизма ограничивается для избежания слишком большого количества троса, излишне размотанного при постановке груза. Никакие ограничения не обязательны в отношении устойчивости конструкции крана при постановке груза. Однако чтобы избегать ситуации, когда оператор крана разматывает слишком большое количество ненатянутого троса, когда он ставит груз на землю, устройство управления краном в соответствии с изобретением также привлекается в таких ситуациях.
Описанные ранее варианты выполнения устройств управления крана в соответствии с изобретением по существу касаются управления управлением подъемным механизмом на тех фазах, на которых груз поднимается или ставится. Это основано на мнении, что наибольшие динамические эффекты имеют место на этих фазах, так что превышение может действенно снижаться ограничением скорости, в частности, посредством зависимого от нагрузки ограничения скорости. В то время как груз свободно висит на крюке крана, представленное ранее устройство управления, однако, не осуществляет способ ограничения или осуществляет способ ограничения только в исключительных ситуациях.
Настоящее изобретение далее включает в себя дополнительный вариант устройства управления, которое преимущественно используется во время фаз, на которых груз свободно висит на тросе крана. На этих фазах устройство управления краном используется для избежания собственных колебаний троса и/или конструкции крана, которые также могут быть деформацией для тросов и для конструкции крана.
В этом отношении настоящее изобретение включает в себя устройство управления краном, для которого требуемое подъемное перемещение груза служит в качестве входной переменной, на основе которой рассчитывается параметр управления для устройства управления подъемным механизмом. В этом отношении устройство управления краном в соответствии с изобретением учитывает динамику колебаний, которая возникает вследствие упругости подъемного троса, при расчете параметра управления. Собственные колебания системы троса и груза, таким образом, могут демпфироваться. Сначала из входных сигналов оператора и/или системы автоматизации формируется требуемое подъемное перемещение груза, которое в этом отношении теперь служит в качестве входной переменной устройства управления краном в соответствии с изобретением. Чтобы устройство управления подъемным механизмом демпфировало собственные колебания, параметр управления затем рассчитывается на основе этой входной переменной и наряду с учетом динамики колебаний.
В этом отношении в дополнение к упругости подъемного троса динамика колебаний подъемного механизма на основании сжимаемости гидравлической жидкости также преимущественно учитывается при расчете параметра управления.
Этот фактор также может вызывать собственные колебания системы подъемного механизма, троса и груза, которые вызывают деформацию в конструкции крана.
Переменная длина троса у подъемного троса преимущественно учитывается при расчете параметра управления. Длина троса у подъемного троса влияет на жесткость троса и, таким образом, его динамические свойства. Дополнительно измеренная подъемная сила или вес груза, висящего на грузовом тросе, определенная по ней, преимущественным образом учитывается при расчете параметра управления. Вес груза, висящего на грузовом тросе, в этом отношении существенно влияет на динамические свойства системы подъемного троса, подъемного механизма и груза.
В этом отношении управление подъемным механизмом преимущественно происходит на основе физической модели, которая описывает подъемное перемещение груза в зависимости от параметра управления подъемного механизма. Таким образом, может достигаться очень хорошее демпфирование колебаний. В дополнение использование физической модели предоставляет возможность быстрого приведения устройства управления краном согласно изобретению в соответствие другим кранам. В этом отношении такое приведение в соответствие, в частности, может происходить на основе простых расчетов и данных о кране. В этом отношении модель преимущественно предполагает неподвижное опорное местоположение для крана.
Управление подъемным механизмом в этом отношении преимущественно происходит на основе обращения физической модели. В зависимости от подъемного перемещения груза получается параметр управления подъемного механизма, который может использоваться в качестве входной переменной управления посредством обращения физической модели.
Более того, возможно комбинировать два варианта для устройства управления краном в соответствии с изобретением. В этом отношении ограничение скорости подъемного механизма, в частности, может иметь место, когда конечный автомат находится в состоянии подъема, и управление подъемным механизмом может происходить на основе требуемого подъемного перемещения, когда конечный автомат переключился в состояние разблокирования.
Настоящее изобретение, кроме того, включает в себя способ для управления подъемным механизмом крана посредством устройства управления краном, причем динамика колебаний системы подъемного механизма, троса и груза на основании упругости подъемного троса учитывается при управлении подъемным механизмом и подавляется или демпфируется устройством управления краном посредством надлежащего управления подъемным механизмом. В этом отношении управление подъемным механизмом, в частности, происходит посредством устройства управления краном согласно изобретению такого, как было представлено выше.
Настоящее изобретение дополнительно включает в себя кран, имеющий устройство управления краном, такое, как было представлено выше.
Настоящее изобретение далее будет представлено более подробно со ссылкой на варианты осуществления и на чертежи, на которых показано:
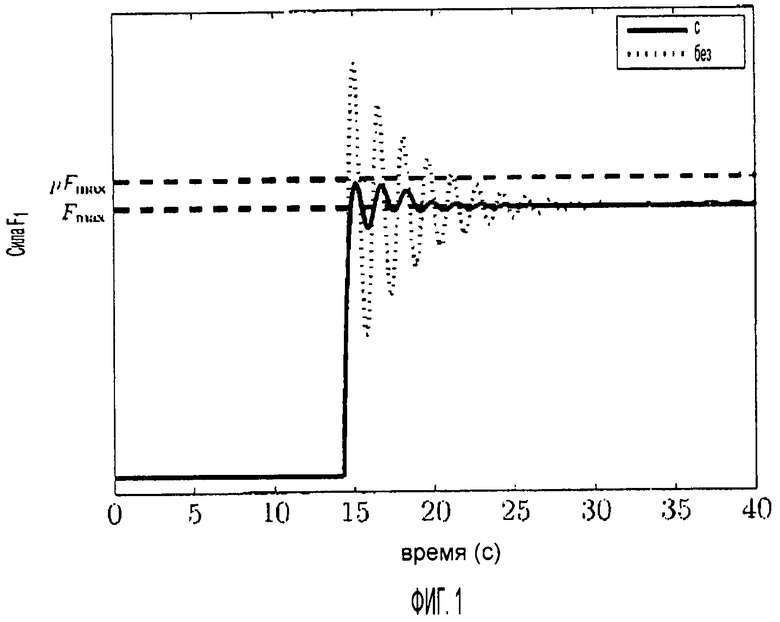
фиг.1 - превышение по оси измерения силы подъемного механизма при поднятии груза с и без использования устройства управления краном в соответствии с настоящим изобретением;
фиг.2 - первый вариант выполнения крана, в котором используется устройство управления краном в соответствии с изобретением;
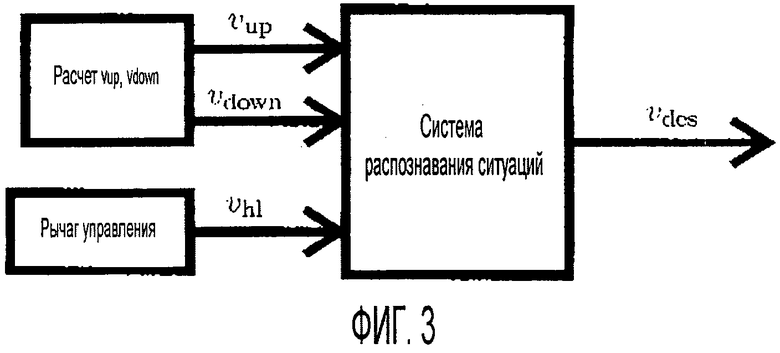
фиг.3 - схематическое представление первого варианта выполнения устройства управления краном в соответствии с изобретением, содержащего систему распознавания ситуаций и ограничение скорости механизированного перемещения подъемного механизма во время состояния подъема;
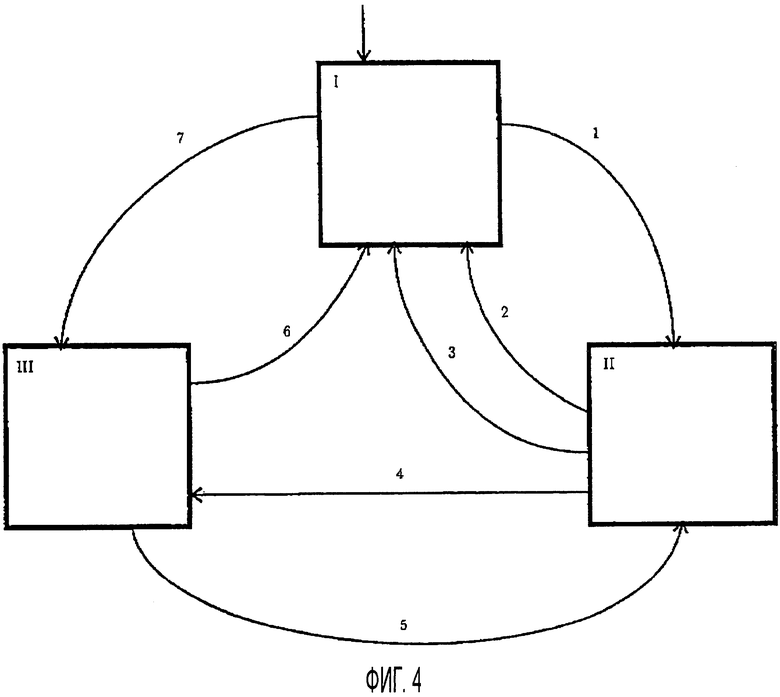
фиг.4 - схематическое представление конечного автомата по первому варианту выполнения;
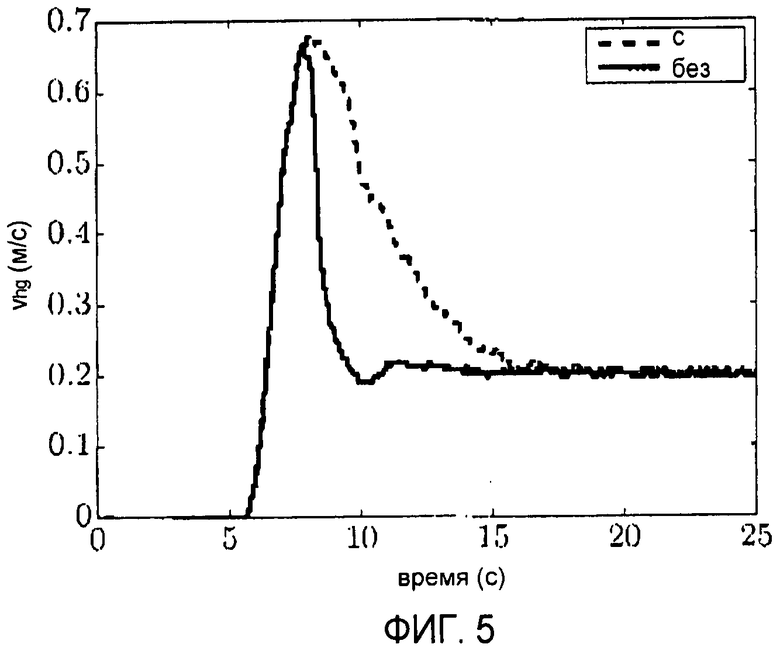
фиг.5 - скорость механизированного перемещения подъемного механизма при поднятии груза с и без использования устройства управления краном в соответствии с первым вариантом выполнения;
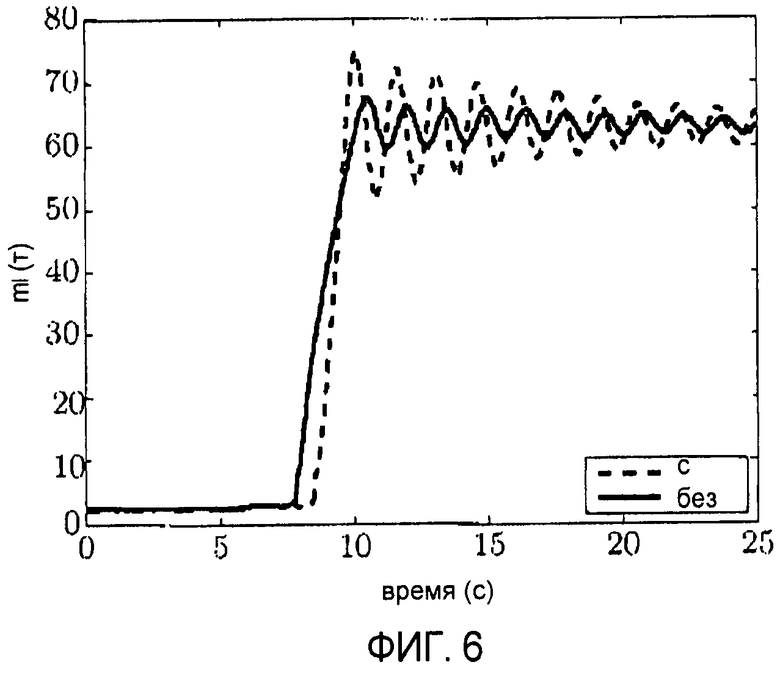
фиг.6 - подъемная сила, которая возникает при управлении подъемным механизмом согласно фиг.5, вновь с и без использования устройства управления краном в соответствии с изобретением согласно первому варианту выполнения;
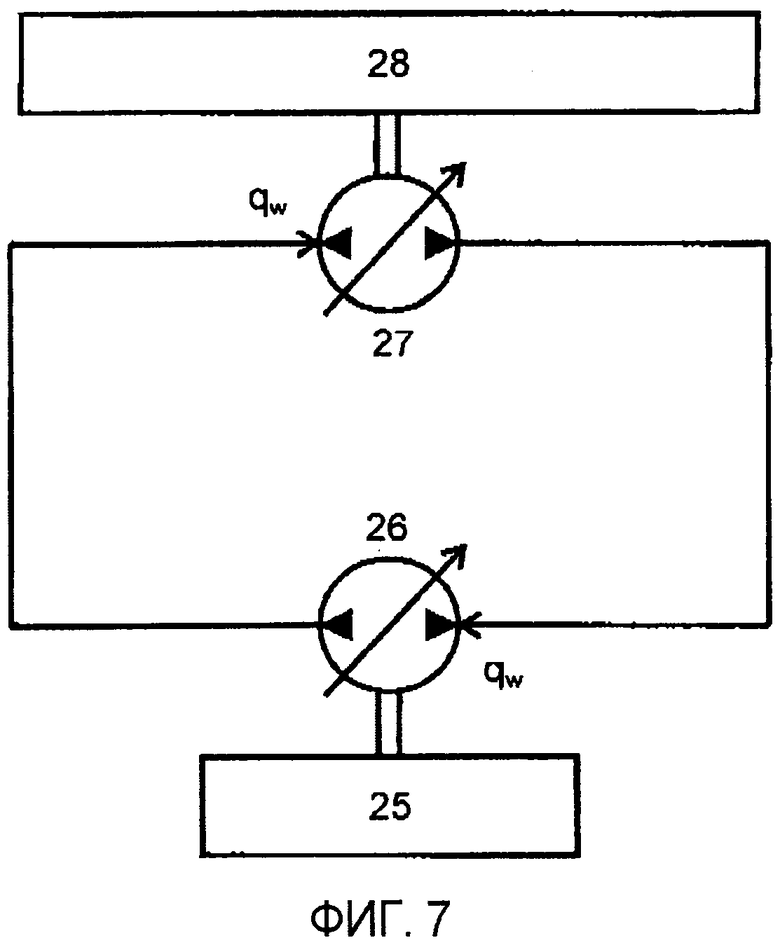
фиг.7 - схематическое представление гидравлического привода подъемного механизма; и
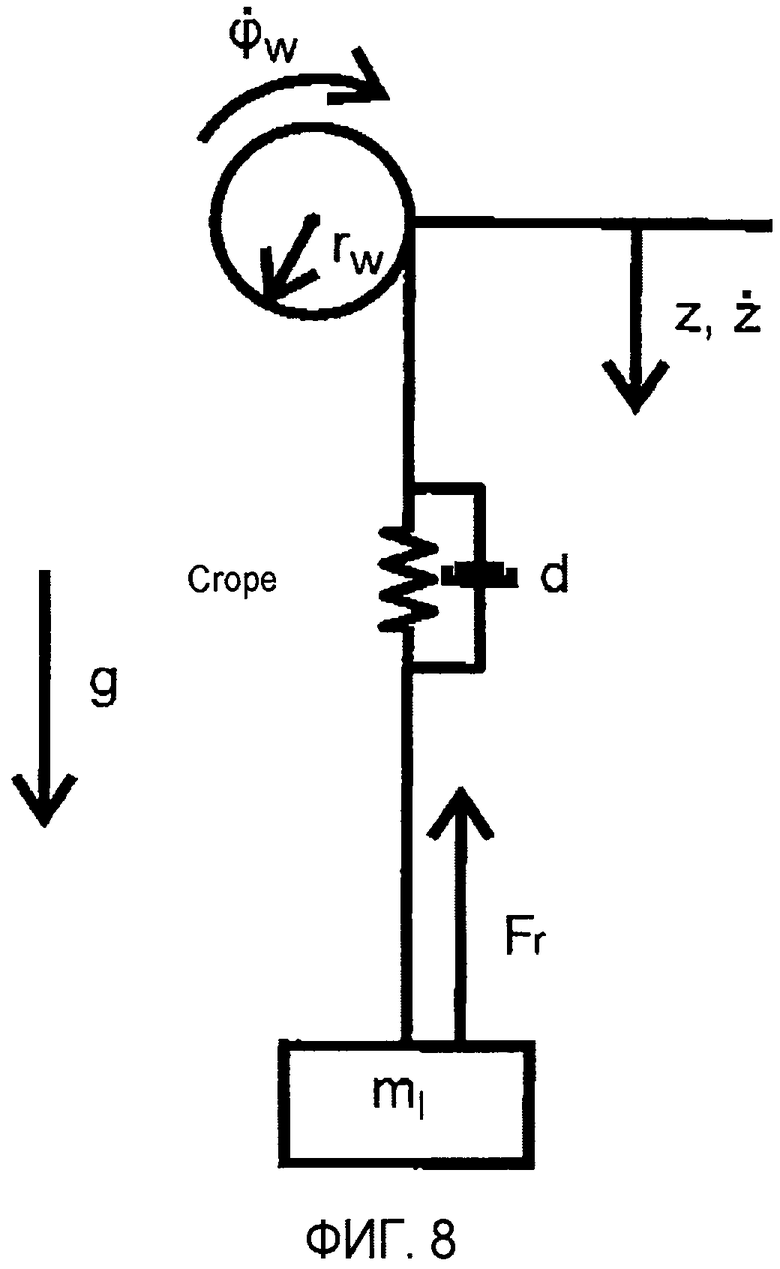
фиг.8 - схематическое представление физической модели, которая используется во втором варианте выполнения, для системы подъемного механизма, троса и груза.
На фиг.2 показан вариант выполнения крана в соответствии с изобретением, который оборудован вариантом выполнения устройства управления краном согласно изобретению. В этом отношении кран имеет стрелу 1, которая шарнирно присоединена к башне 2 некоторым образом, способным менять угол уклона стрелы вокруг горизонтальной оси изменения угла уклона. В этом отношении гидравлический цилиндр 10, который шарнирно присоединен между стрелой 1 и башней 2, предусмотрен для увеличения и уменьшения угла уклона стрелы 1 в плоскости изменения угла уклона. Башня 2 выполнена вращаемой вокруг вертикальной оси вращения. Башня 2 для этой цели выполнена на надстройке 7, которая может поворачиваться относительно ходового устройства 8 посредством поворотного механизма. В этом отношении данный вариант осуществления является самоходным краном, для которого ходовое устройство 8 оборудовано ходовым механизмом 9. Кран в таком случае может подпираться с помощью опорных элементов 71 в положении подъема.
Подъем груза в этом отношении происходит с помощью подъемного троса 3, на котором выполнен элемент 4 приема груза, в этом случае крюк крана. Подъемный трос 3 в данном отношении проводится через тали на головке 5 стрелы крана, а также на верхушке 6 башни, в подъемный механизм 30 в надстройке, и длина подъемного троса может изменяться с его помощью. В этом отношении подъемный механизм 30 выполнен в качестве подъемной лебедки.
В соответствии с изобретением, устройство управления краном учитывает динамические свойства системы подъемного механизма, подъемного троса и груза при управлении подъемным механизмом, чтобы подавлять колебания, обусловленные упругостью подъемного троса.
Первый вариант осуществления способа управления, реализованного в устройстве управления краном в соответствии с изобретением, будет более подробно представлен в последующем.
1. Введение в первый вариант осуществления
В соответствии с DIN EN 13001-2 и DIN EN 14985 (стандарты Немецкого института стандартов), стальная конструкция в поворотном стреловом кране может быть уменьшена при условии, что максимальное превышение может гарантироваться на оси измерения силы подъемного механизма. В этом отношении максимальная разрешенная зависящая от вылета стрелы подъемная сила может быть превышена только на p-кратное значение динамическим превышением при поднятии груза с земли. Чтобы гарантировать такое максимальное превышение, может использоваться система автоматического подъема.
Фиг.1 показывает измеренную подъемную силу при поднятии груза без системы автоматического подъема и с системой автоматического подъема, которая гарантирует максимальное превышение p-кратным значением. Система автоматического подъема, представленная в последующем, гарантирует, что максимальная разрешенная зависящая от вылета стрелы максимальная сила в подъемном механизме при поднятии груза с земли никогда не превышается более чем на p-кратное значение. В дополнение, система автоматического подъема, обсуждаемая здесь, уменьшает скорость подъемного механизма при постановке груза на землю. Таким образом, должно избегаться, чтобы оператор крана разматывал слишком много ненатянутого троса, когда он ставит груз на землю.
2. Модель крана в первом варианте осуществления
В последующем будет описана модель крана, которая используется в первом варианте осуществления для усовершенствования системы автоматического подъема. Фиг.2 показывает полную конструкцию портового самоходного крана. Груз с массой m l поднимается краном посредством средства закрепления груза и присоединен к подъемной лебедке через трос, имеющий общую длину l r. Трос провешивается от средства закрепления груза через соответственный шкив провеса на головке стрелы и на башне. В этом отношении необходимо отметить, что трос не провешивается непосредственно на подъемную лебедку посредством головки стрелы, а скорее провешивается головкой стрелы на башню, затем обратно на головку стрелы, а затем через башню на подъемную лебедку (см. фиг.2). Общая длина троса, таким образом, получается в виде

где l 1, l 2 и l 3 - частичные длины от подъемной лебедки до башни, от башни до головки стрелы и от головки стрелы до средства закрепления груза. Далее предполагается, что кран ведет себя подобно пружинно-массовому демпферу при подъеме груза. Общая жесткость пружины крана при подъеме груза состоит из жесткости пружины тросов и жесткости пружины крана (провиса башни, стрелы и т.д.). Жесткость пружины троса получается в виде

где E r и A r - модуль упругости и площадь поперечного сечения троса. Поскольку n r параллельных тросов поднимают груз на портовом самоходном кране (см. фиг.2), жесткость c rope пружины тросов получается в виде

Для расчета общей жесткости пружины предполагается, что жесткость крана и тросов соединены последовательно, то есть

3. Система автоматического подъема в первом варианте осуществления
Система автоматического подъема, представленная здесь, основана на конечном автомате с дискретными событиями, которые должны обнаруживать поднятие груза. Как только груз поднимается, скорость подъема должна быть уменьшена до заданного значения, и, таким образом, должно гарантироваться максимальное превышение динамической подъемной силы. Как только груз был полностью поднят от земли, скорость подъемного механизма вновь должна быть разблокирована системой автоматического подъема.
В дополнение система автоматического подъема должна обнаруживать постановку груза и подобным образом должна уменьшать скорость подъемного механизма. Подъемный механизм здесь должен быть вновь разблокирован вслед за постановкой.
Схема системы автоматического подъема показана на фиг.3. В пределах блока «Предварительная установка vup, vdown» разрешенные максимальные скорости для поднятия груза и постановки груза рассчитываются или предварительно задаются. Точный расчет описан в следующем разделе. В блоке «Распознавание ситуаций» выявляется, поднимается ли груз от земли или ставится на землю, либо находится ли кран в нормальном режиме работы. На основе ситуации в тот момент времени, затем выбирается соответствующая требуемая скорость v des. Это решение, как описано выше, основано на конечном автомате с дискретными событиями.
В последующем описании должно быть отмечено, что ось z перемещения груза направлена вниз (см. фиг.2). Таким образом, груз опускается при положительной скорости v hg подъемного механизма и поднимается при отрицательной скорости v hg подъемного механизма.
3.1. Предварительная установка v up , v down
В пределах этого блока рассчитывается максимальная разрешенная скорость v up подъема при подъеме груза с земли. Эта скорость зависит от подъемной силы F l, измеренной в тот момент времени, от зависящей от вылета стрелы максимальной разрешенной подъемной нагрузки m max и от общей жесткости c total пружины. Для расчета предполагается, что подъемное перемещение груза вскоре после поднятия от земли состоит из постоянного подъемного перемещения и наложенных колебаний. Колебания в этом отношении описываются недемпфированной пружинно-массовой системой. Измеренная подъемная сила, таким образом, получается в виде

где F const=m l g - сила статической нагрузки на основе силы тяжести. Динамическая подъемная сила F dyn описывается динамической жесткостью пружины пружинно-массового вибратора.

где  - ускорение груза (без ускорения, обусловленного силой тяжести). Дифференциальным уравнением для недемпфированной пружинно-массовой системы является
- ускорение груза (без ускорения, обусловленного силой тяжести). Дифференциальным уравнением для недемпфированной пружинно-массовой системы является

Начальные условия для (7) получаются в виде

поскольку  , и
, и

поскольку груз, имеющий скорость v up, должен подниматься с земли (z - положительно направлена вниз). Общее решение (7) задано согласно

Коэффициенты A и B могут быть рассчитаны по начальным условиям (8) и (9) и получаются в виде

где
Развитие во времени динамической силы, таким образом, получается как

а потому

поскольку -1≤sin(ωt)≤1. Максимальное превышение в подъемной силе теперь должно быть равным pm max g, поэтому для максимальной разрешенной скорости подъема при поднятии получается


При этом текущая на тот момент подъемная нагрузка m l во время поднятия (груз еще не был поднят) может рассчитываться по измеренной силе нагрузки. Для этого момента времени еще не присутствует никакой динамической силы F dyn. Он применяется в течение так называемого тугого натяжения троса подъемного механизма

и, таким образом,

В дополнение максимальная разрешенная скорость подъемного механизма при постановке груза, v down, предварительно устанавливается в пределах этого блока. Это может выбираться в качестве постоянного значения, поскольку никаких ограничений, обусловленных стандартами, здесь наблюдаться не должно. Замедление до этой скорости должно служить только защите ненатянутого троса.
3.2. Распознавание ситуаций
В этом блоке соответствующая требуемая скорость выбирается на основе ситуации в тот момент времени посредством конечного автомата с дискретными событиями. Конечный автомат, используемый здесь, показан на фиг.4. Ассоциативно связанные переходы и действия в отдельных состояниях описаны ниже. Отдельные переменные собраны в таблице 1.
3.2.1. Общие расчеты
Расчеты, описанные в этом разделе, выполняются независимо от соответственного состояния. В последующем измеренная масса m l груза понимается в качестве массы груза на крюке, измеренной по оси измерения силы наряду с пренебрежением динамическими силами, то есть m l =F l/g.
Расчет
 :
:
Это является производной по времени подъемной силы, измеренной в тот момент времени.
Расчет ∆m up :
Это абсолютная разность измеренной массы груза по сравнению с измеренной массой груза в последнем локальном минимуме измеренного сигнала, которая в последующем обозначается как m 0,up . В дополнение m 0,up обновляется (m 0,up=m l), когда произошел переход 2 в конечном автомате. Это имеет место, когда после подъема груза обнаружено, что груз поднялся от земли.
Расчет ∆m down :
Это абсолютная разность измеренной массы груза по сравнению с измеренной массой груза в последнем локальном максимуме измеренного сигнала, которая в последующем обозначается как m 0,down . В дополнение m 0,down обновляется (m 0,down=m l), когда произошел переход 6 в конечном автомате. Это имеет место, когда подъемный механизм вновь разблокирован после постановки груза.
Расчет ∆m up.det :
Это пороговое значение, которое должно превышаться ∆m up, с тем чтобы было возможно обнаружение подъема груза. Это пороговое значение зависит от соответственного типа крана и от измеренного сигнала на последнем локальном минимуме m 0,up .
Расчет ∆m dawn,det :
Это пороговое значение, ниже которого должно падать ∆m down, с тем чтобы было возможно обнаружение постановки груза. Это пороговое значение зависит от соответственного типа крана и от измеренного сигнала на последнем локальном максимуме m 0,down.
Расчет
 :
:
Это пороговое значение, которое должно быть превышено  , чтобы обнаружить возможный подъем груза. Это пороговое значение зависит от соответственного типа крана, от общей жесткости c
total пружины, от разрешенного превышения p на оси измерения силы и от отношения
, чтобы обнаружить возможный подъем груза. Это пороговое значение зависит от соответственного типа крана, от общей жесткости c
total пружины, от разрешенного превышения p на оси измерения силы и от отношения  , где m
max - зависящая от вылета стрелы максимальная разрешенная подъемная нагрузка.
, где m
max - зависящая от вылета стрелы максимальная разрешенная подъемная нагрузка.
3.2.2. Описание состояний
Состояние I (разблокирование подъемного механизма):
В пределах этого состояния подъемный механизм разблокирован и может эксплуатироваться стандартным образом. Система запускается после инициализации (запуска крана) в этом состоянии.
Действия и расчеты при входе в I:
Действия и расчеты при нахождении в I:
Поскольку рычаг управления разблокирован в этом состоянии, применяется
Состояние II (подъем)
Система находится в этом состоянии после того, как было обнаружено, что поднимается груз. Когда проведен переход в это состояние, l 0 и m 0 инициализируются значениями l rel и m l· l rel - относительное значение преобразователя угла подъемной лебедки, преобразованное в метры, а m l - масса груза, измеренная в тот момент времени.
Действия и расчеты при нахождении в II:
Коль скоро система находится в этом состоянии, расчет длины троса, намотанной относительно l 0, и теоретической требуемой длины троса для подъема, ∆l raise, происходит на каждом временном шаге.

В этом отношении m safety - коэффициент запаса, с тем чтобы больше троса, чем необходимо, должно было наматываться до того, как может быть прекращено это состояние. Два случая должны распознаваться в этом состоянии при расчете сигнала управления. Текущая на тот момент скорость v hl рычага управления и максимальная разрешенная скорость подъемного механизма при подъеме, v up (16), служат распознаванию этих случаев. В этом отношении должно быть отмечено, что отрицательное v означает подъем, а положительное v означает опускание.
Двумя случаями являются:
1. (v hl<v up)
В этом случае скорость рычага управления находится вне разрешенного диапазона, так что применяется
2. (v hl>v up)
В этом случае скорость рычага управления находится в пределах разрешенного диапазона, так что применяется
Состояние III (постановка)
Система входит в это состояние, как только обнаружена постановка груза. Когда проведен переход в это состояние, l 0 инициализируется значением l ref.
Действия и расчеты при нахождении в III:
Коль скоро система находится в этом состоянии, расчет длины троса, размотанной относительно l 0, происходит на каждом временном шаге.
Два случая должны распознаваться в этом состоянии при расчете сигнала управления. Текущая на тот момент скорость v hl рычага управления и максимальная разрешенная скорость подъемного механизма при постановке, v down, служат распознаванию этих случаев. Должно быть отмечено в этом отношении, что отрицательное v означает подъем, а положительное v означает опускание. Двумя случаями являются:
1. (v hl>v down)
В этом случае скорость рычага управления находится вне разрешенного диапазона, так что применяется
2. (v hl<v down)
В этом случае скорость рычага управления находится в пределах разрешенного диапазона, так что применяется
3.2.3. Описание переходов
В последующем должно быть отмечено, что текущая на тот момент измеренная скорость v hg лебедки определяется, как изложено ниже:
- отрицательное v hg означает, что лебедка работает, осуществляя подъем;
- положительное v hg означает, что лебедка работает, осуществляя опускание.
Переход 1:
Становится активным, как только подъем груза с земли обнаружен в состоянии «Разблокирование подъемного механизма». Следующее событие активизирует этот переход:

Следующие расчеты выполняются при этом прохождении данного перехода:
Переход 2:
Становится активным, как только подъемная лебедка действует, осуществляя опускание при подъеме груза. И относительно намотанная длина ∆l троса вновь была полностью размотана. Система, таким образом, вновь находится в начальном состоянии до того, как был обнаружен подъем груза. Следующее событие активизирует этот переход.

Следующие расчеты выполняются при этом прохождении данного перехода:
Переход 3:
Становится активным, как только обнаруживается, при подъеме груза от земли, что груз был поднят от земли. Следующее событие активизирует этот переход:
Следующие расчеты выполняются при этом прохождении данного перехода:
В дополнение при прохождении данного перехода m 0,up устанавливается для расчета ∆m up в тогдашнюю текущую измеренную массу m l груза (см. 3.2.1).
Переход 4:
Активизируется, как только в состоянии «Подъем» обнаружена постановка груза или измеренная нагрузка падает ниже определенного собственного веса средства закрепления груза. Следующее событие активизирует этот переход:

Следующие расчеты выполняются при этом прохождении данного перехода:
Переход 5:
Становится активным, как только подъем груза с земли обнаружен в состоянии «Разблокирование подъемного механизма».
Следующее событие активизирует этот переход.

Следующие расчеты выполняются при этом прохождении данного перехода:
Переход 6:
Становится активным, как только в состоянии «Постановка» обнаруживается, что относительная намотанная длина ∆l троса вновь находится в начальном состоянии (до того, как пройден переход 7). Следующее событие активизирует этот переход.
При прохождении данного перехода m 0,down устанавливается для расчета ∆m down в текущую на тот момент измеренную массу m l груза (см. 3.2.1).
Переход 7:
Активизируется, как только в состоянии «Разблокирование подъемного механизма» обнаружена постановка груза или измеренная нагрузка падает ниже определенного собственного веса средства закрепления груза. Следующее событие активизирует этот переход:

Следующие расчеты выполняются при этом прохождении данного перехода:
4. Результаты устройства управления краном в соответствии с первым вариантом осуществления
Результаты измерения показаны в качестве примера на фиг.5 и 6, на которых груз 60 т поднимался с земли с ненатянутым тросом. Данные фигуры в каждом случае содержат в себе измерение с и без системы автоматического подъема в соответствии с первым вариантом осуществления настоящего изобретения.
Описание переменных из системы автоматического подъема

 для обнаружения подъема груза.
для обнаружения подъема груза.
5. Введение во второй вариант осуществления
В последующем далее будет показан второй вариант осуществления способа управления, реализованного в устройстве управления краном в соответствии с изобретением, в котором учитываются динамические свойства системы подъемного механизма, подъемного троса и груза, которые основаны на сжимаемости гидравлической жидкости и на упругости нагрузки.
Фиг.7 показывает схематическое представление гидравлической системы подъемного механизма. Например, вновь предусмотрен дизельный двигатель или электродвигатель 25, который здесь приводит в действие нагнетательный насос 26 с регулируемой подачей. Нагнетательный насос 26 с регулируемой подачей образует гидравлический контур с гидравлическим двигателем 27 и приводит его в движение. Гидравлический двигатель 27 в этом отношении также выполнен в качестве двигателя с переменным рабочим объемом. В качестве альтернативы также мог бы использоваться двигатель с фиксированным рабочим объемом. В таком случае подъемная лебедка приводится в действие посредством гидравлического двигателя 27.
Физическая модель, посредством которой во втором варианте осуществления описываются динамические свойства системы подъемной лебедки, грузового троса 3 и груза, показана на фиг.8. Система, содержащая грузовой трос и груз, в этом отношении рассматривается в качестве системы демпфированного пружинного маятника, имеющей динамическую жесткость C и коэффициент D демпфирования. В этом отношении длина подъемного троса, L, включается в динамическую жесткость C и определяется, опираясь на измеренные значения, или рассчитывается на основе управления подъемной лебедкой. Кроме того, берется в управление масса M груза, которая измеряется с помощью датчика массы груза.
Второй вариант осуществления также используется для управления портовым самоходным краном, как показано на фиг.2. Здесь стрела, башня и подъемная лебедка приводятся в движение через соответствующие приводы. Гидравлические приводы, приводящие в движение подъемную лебедку крана, порождают собственные колебания, обусловленные собственными динамическими свойствами гидравлической системы и/или подъемного троса. Результирующие колебания силы оказывают влияние на долгосрочную усталость тросов и всей конструкции крана, которая имеет следствием повышенные эксплуатационные расходы. Поэтому в соответствии с изобретением предусмотрено правило регулирования, которое подавляет собственные колебания, вызванные перемещениями изменения угла уклона, разворота и подъема крана и тем самым уменьшает нагрузочные циклы в пределах диаграммы Велера. Уменьшение нагрузочных циклов логически увеличивает срок службы конструкции крана.
Обратные связи должны избегаться при выведении правила регулирования по второму варианту осуществления, поскольку они требуют сигналов датчиков, которые должны удовлетворять особым требованиям безопасности в промышленных применениях и тем самым приводят к более высоким затратам.
Поэтому конструкция регулятора с чисто прямой связью без обратной связи не является необходимой. Основанный на плоскостности регулятор с прямой связью, который обращает динамические свойства системы, будет получен для подъемного механизма в рамках этого рассуждения.
6. Подъемная лебедка
Подъемная лебедка крана, представленного в варианте осуществления, приводится в действие роторным двигателем с гидравлическим приводом. Динамическая модель и правило регулирования для подъемной лебедки будут выведены в следующем разделе.
6.1. Динамическая модель
Поскольку подъемная сила находится под непосредственным влиянием перемещения полезного груза, динамика перемещения полезного груза должна учитываться. Как показано на фиг.2, полезный груз, имеющий массу m l, прикреплен к крюку и может подниматься или опускаться краном посредством троса длиной l r. Трос провешивается шкивом провеса на головке конца стрелы и на башне. Однако трос провешивается не прямо от конца стрелы до подъемной лебедки, а скорее от конца стрелы до башни, оттуда назад до конца стрелы, а затем через башню в подъемную лебедку (см. фиг.2). Общая длина троса, таким образом, задана согласно:

где l 1, l 2 и l 3 - частичные длины от подъемной лебедки до башни, от башни до конца стрелы и от конца стрелы до крюка. Подъемная система крана, которая содержит подъемную лебедку, трос и полезный груз, рассматривается в последующем в качестве пружинно-массовой демпферной системы и показана на фиг.8. Использование метода Ньютона-Эйлера дает уравнение движения для полезного груза:
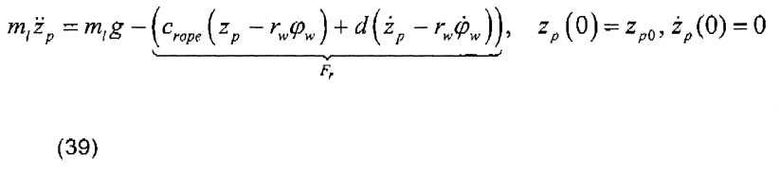
с постоянной g силы тяжести, динамической жесткостью c
rope, коэффициентом d демпфирования, вылетом r
w стрелы подъемной лебедки, углом φ
w подъемной лебедки, угловой скоростью  подъемной лебедки, положением z
p полезного груза, скоростью
подъемной лебедки, положением z
p полезного груза, скоростью  полезного груза и ускорением
полезного груза и ускорением  полезного груза.
полезного груза.
Длина l r троса задана посредством:

где

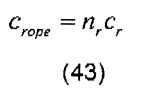
Динамическая жесткость c r троса длиной l r задана законом Гука и может быть записана как

где E r и A r - модуль упругости и площадь сечения троса, соответственно. Кран имеет n r параллельных тросов (см. фиг.2), так что динамическая жесткость подъемного механизма крана задается согласно:
Коэффициент демпфирования может быть задан с помощью безразмерного относительного демпфирования D

Дифференциальное уравнение для вращательного движения подъемной лебедки следует в соответствии с методом Ньютона-Эйлера в качестве

где J w и J m - моменты инерции лебедки или двигателя, соответственно, i w - передаточное число между двигателем и лебедкой, ∆p w - перепад давлений между камерой высокого давления и камерой низкого давления двигателя, соответственно. D m - смещение гидравлического двигателя, а F t - усилие пружины, заданное в (39). Начальное условие φ w0 для угла подъемной лебедки задано согласно (41). Гидравлический контур для подъемной лебедки показан на фиг.7. Перепад ∆p w давлений между двумя камерами давления двигателя описан уравнением повышения давления при условии, что нет внутренних или внешних утечек. В дополнение в последующем пренебрегается небольшое изменение объема, обусловленное углом φ w двигателя. Объем в двух камерах давления, таким образом, предполагается в качестве постоянной и обозначен V m . С помощью этих допущений уравнение повышения давления может быть описано как

где β - сжимаемость масла. Пропускная способность q w масла предустанавливается углом насоса и задана посредством

где u w и K w - управляющий ток угла насоса и коэффициент пропорциональности, соответственно.
6.2. Закон управления
Динамическая модель для подъемной лебедки в последующем преобразована в пространство состояний, чтобы спроектировать основанный на плоскостности регулятор с прямой связью. Вывод правила регулирования пренебрегает демпфированием, поэтому применяется D=0. Вектор состояния подъемного механизма крана определен в качестве  . Динамическая модель, содержащая (39), (40), (43), (45) и (47), таким образом, может быть записана в качестве системы дифференциальных уравнений первого порядка, система задается согласно:
. Динамическая модель, содержащая (39), (40), (43), (45) и (47), таким образом, может быть записана в качестве системы дифференциальных уравнений первого порядка, система задается согласно:

где
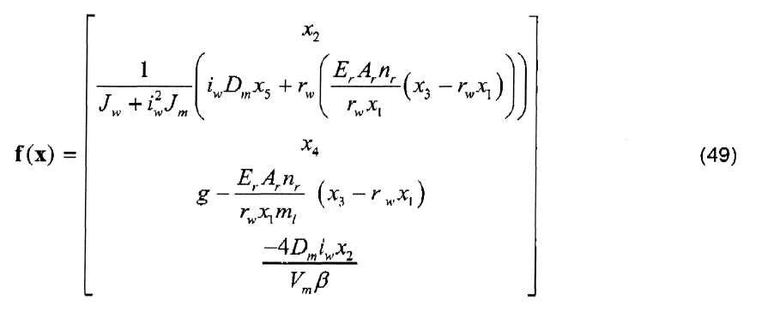

а u=u w.
Относительная степень r по отношению к выходу системы должна быть равной порядку n системы для конструкции основанного на плоскостности регулятора с прямой связью. Относительная степень наблюдаемой системы (48) поэтому будет рассмотрена в последующем. Относительная степень по отношению к выходу системы является постоянной при следующих условиях:

Операторы L f и L g представляют производные Ли вдоль по векторным полям f и g, соответственно. Использование (52) дает r=n=5, так что система (48) с (49), (50) и (51) является плоской, и основанный на плоскостности регулятор с прямой связью может быть сконструирован для D=0.
Выход (51) системы и его производные используются для обращения динамических свойств системы. Производные выдаются производными Ли, то есть

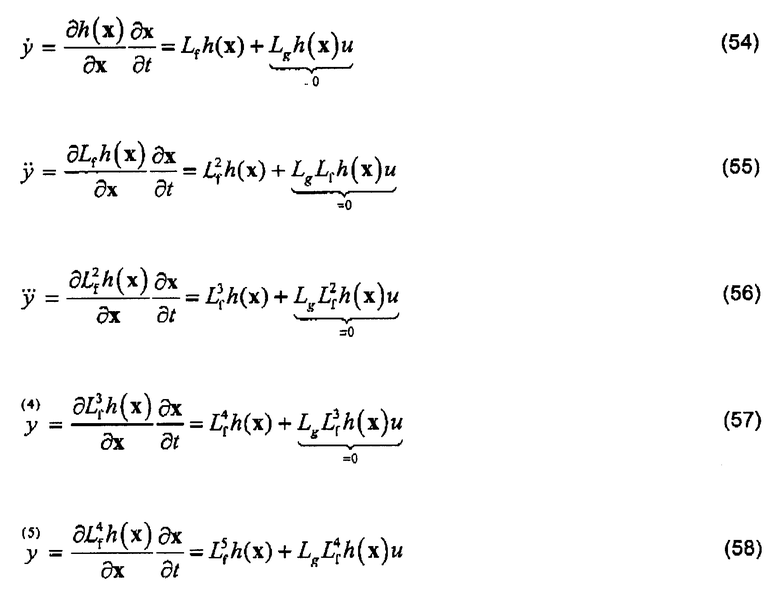
Состояния в зависимости от выхода системы и его производных следуют из (53), (54), (55), (56) и (57) и могут быть записаны в качестве:
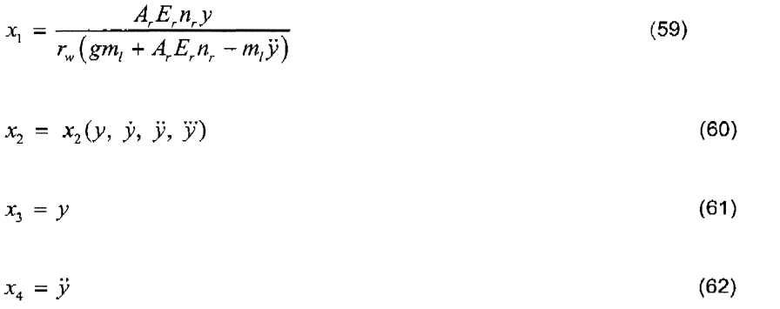

Решение (58) после входа u системы дает при использовании (59), (60), (61), (62) и (63) правило регулирования для основанного на плоскостности регулятора с прямой связью для подъемного механизма

которое обращает динамические свойства системы. Опорный сигнал y и его производные получаются численным формированием траектории из сигнала рычага управления оператора крана.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН И СПОСОБ УПРАВЛЕНИЯ ТАКИМ КРАНОМ | 2017 |
|
RU2728315C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ ПОВОРОТНОЙ ЧАСТИ БАШЕННОГО КРАНА | 2009 |
|
RU2499762C2 |
| СИСТЕМА РЕГИСТРАЦИИ МАССЫ ГРУЗА, ВИСЯЩЕГО НА ПОДЪЕМНОМ КАНАТЕ КРАНА | 2010 |
|
RU2537728C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2005 |
|
RU2305063C2 |
| КРАН С СИСТЕМОЙ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2090486C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2010 |
|
RU2440924C1 |
| КРАН | 2017 |
|
RU2734966C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОДЪЕМА КРЮКА СТРЕЛОВОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2096307C1 |
| СПОСОБ, СИСТЕМА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОТКЛОНЕНИЕМ КРЮКА | 2010 |
|
RU2506221C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2006 |
|
RU2335451C1 |
Настоящее изобретение относится к области управления подъемным механизмом крана. Устройство управления краном для управления подъемным механизмом (30) крана учитывает динамику колебаний на основании упругости подъемного троса (3) при управлении подъемным механизмом (30) и подавляет их посредством надлежащего управления подъемным механизмом (30). Максимальная разрешенная скорость механизированного перемещения подъемного механизма (30) определяется динамически, опираясь на данные крана. Достигается повышение надежности, безопасности. 3 н. и 11 з.п. ф-лы, 8 ил.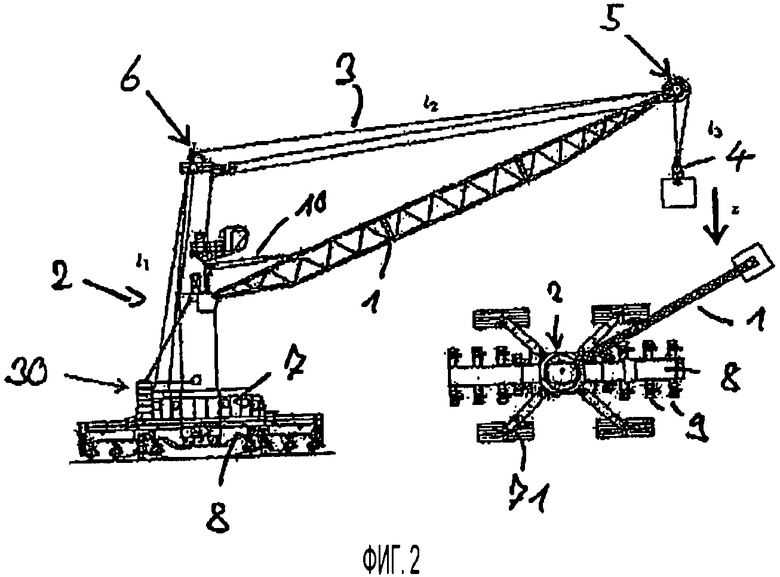
1. Устройство управления краном для управления подъемным механизмом крана, которое учитывает динамику колебаний на основании упругости подъемного троса при управлении подъемным механизмом и подавляет их посредством надлежащего управления подъемным механизмом, при этом максимальная разрешенная скорость механизированного перемещения подъемного механизма определяется динамически, опираясь на данные крана.
2. Устройство по п.1, в котором скорость механизированного перемещения подъемного механизма ограничена для ограничения превышений максимальной разрешенной скоростью механизированного перемещения.
3. Устройство по п.2, в котором максимальная разрешенная скорость механизированного перемещения подъемного механизма определяется в зависимости от измеренной в текущий в то время момент подъемной силы и/или определяется в зависимости от длины троса.
4. Устройство по п.2, в котором максимальная разрешенная скорость механизированного перемещения подъемного механизма определяется на основе физической модели, которая описывает динамику колебаний системы подъемного механизма, троса и груза.
5. Устройство по одному из предыдущих пунктов, содержащее систему распознавания ситуаций, опираясь на которую, устройство управления краном определяет режим управления.
6. Устройство по п.5, в котором система распознавания ситуаций распознает состояние подъема, в котором скорость механизированного перемещения подъемного механизма ограничивается, чтобы избежать превышений, причем система распознавания ситуаций преимущественно распознает состояние подъема, когда поднимается груз, лежащий на земле.
7. Устройство по п.5, в котором система распознавания ситуаций распознает состояние разблокирования, в котором разблокирована скорость механизированного перемещения подъемного механизма, причем состояние разблокирования преимущественно распознается, когда груз был поднят и теперь свободно висит на тросе крана.
8. Устройство по п.5, в котором система распознавания ситуаций распознает состояние постановки, в котором скорость механизированного перемещения подъемного механизма ограничивается для предотвращения слишком большого количества троса, излишне размотанного при постановке груза.
9. Устройство по п.1, в котором требуемое подъемное перемещение груза служит в качестве входной переменной, на основе которой рассчитывается параметр управления для управления подъемным механизмом, при этом динамика колебаний, обусловленная упругостью подъемного троса, учитывается при расчете параметра управления для уменьшения собственных колебаний.
10. Устройство по п.9, в котором подъемный механизм приводится в движение гидравлически, а динамика колебаний, обусловленная сжимаемостью гидравлической жидкости, учитывается при расчете параметра управления.
11. Устройство по п.9, в котором переменная длина троса подъемного троса и/или измеренная подъемная сила учитывается при расчете параметра управления.
12. Устройство по п.9, в котором управление подъемным механизмом основано на физической модели крана, которая описывает подъемное перемещение груза в зависимости от параметра управления подъемного механизма, при этом управление подъемным механизмом преимущественно основано на обращении физической модели.
13. Способ для управления подъемным механизмом крана посредством устройства управления краном по одному из пп.1-12, который учитывает динамику колебаний на основании упругости подъемного троса при управлении подъемным механизмом и подавляет их посредством надлежащего управления подъемным механизмом.
14. Кран, содержащий устройство управления краном по одному из пп.1-12.
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

