Предлагаемое изобретение относится к области спутниковой навигации и может быть использовано для определения углового положения объектов в пространстве или на плоскости в условиях воздействия преднамеренных широкополосных помех.
Наиболее современными признаются методы борьбы с помехами на основе пространственной селекции, обеспечиваемой при помощи многоэлементных антенных систем. Принцип компенсации помех заложен в использование корреляционных свойств помеховых колебаний, принятых различными каналами. Аппаратура защиты от активных шумовых помех навигационной аппаратуры потребителей представляет собой многоканальный квадратурный корреляционный автокомпенсатор с алгоритмом формирования весовых коэффициентов и компенсационного цифрового суммирования. Для эффективного подавления помех требуется учесть все задержки и декоррелирующие факторы, возникающие в приемных трактах, которые могут быть самого разного рода: в виде различий в ширине полосы пропускания и в частоте настройки (центральной частоте), различий в форме комплексной частотной характеристики (КЧХ), разбросом компенсационных каналов по коэффициенту усиления и фазовому сдвигу.
Известен способ компенсации помех, принятых на основную и дополнительные (компенсационные) антенны, которые не должны содержать полезного сигнала [1]. Сигнал основного канала подается на сумматор с единичным весом, а колебания компенсационных каналов взвешиваются исходя из помеховой обстановки. При этом цель подстройки весовых коэффициентов - обеспечить минимальную мощность шума на выходе сумматора. Недостатком этого способа является невозможность определения углового положения объекта.
Также известен способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов, взятый в качестве прототипа, основанный на приеме сигналов от n космических аппаратов двумя или более антенно-приемными устройствами, расположенными параллельно одной или двум осям объекта, выделении сигнала с частотой Доплера, определении набега фаз за интервал времени измерения и определении углового положения объекта [2]. Данный способ рассчитан на прием только радионавигационных сигналов, без учета возможных принимаемых помеховых сигналов как естественного, так и преднамеренного происхождения, поэтому в сложной поме-ховой обстановке определение угловой ориентации объекта становится крайне затруднительным.
В основу изобретения положена задача повышения эффективности работы угломерной навигационной аппаратуры в сложной помеховой обстановке путем компенсационного цифрового подавления помехи с учетом предварительной калибровки приемных каналов при заданных погрешности и времени измерения угловой ориентации объекта.
Поставленная задача решается тем, что в способе угловой ориентации объекта по радионавигационным сигналам космических аппаратов, основанном на приеме радионавигационных сигналов от n навигационных космических аппаратов двумя или более приемными каналами, антенны которых расположены так, что линии, проведенные через фазовые центры антенн, параллельны одной или двум осям объекта, измерении фазовых сдвигов между сигналами от каждого из n навигационных космических аппаратов между парами приемных каналов и определении углового положения объекта, согласно изобретению в условиях помеховой обстановки перед измерением фазовых сдвигов определяют вектор поправочного весового коэффициента для каждого из приемных каналов путем их калибровки эталонной пилот-помехой, сигнал помехи каждого из приемных каналов суммируют с сигналами помех остальных каналов, являющихся для него компенсационными, предварительно умноженными на соответствующий вектор весового коэффициента, которые вычисляют на основе рекуррентной оценки обратной корреляционной матрицы помех с учетом векторов поправочных весовых коэффициентов, выделяют радионавигационные сигналы от n навигационных космических аппаратов и восстанавливают их исходные параметры в каждом приемном канале путем решения системы уравнений
 где
где
 - выделенный радионавигационный сигнал, принятый от i-го навигационного космического аппарата в m-м приемном канале;
- выделенный радионавигационный сигнал, принятый от i-го навигационного космического аппарата в m-м приемном канале;
 - принятый радионавигационный сигнал от i-го навигационного космического аппарата в m-м приемном канале;
- принятый радионавигационный сигнал от i-го навигационного космического аппарата в m-м приемном канале;
 - вектор весового коэффициента k-го компенсационного канала в m-м приемном канале;
- вектор весового коэффициента k-го компенсационного канала в m-м приемном канале;
 - вектор поправочного весового коэффициента k-го компенсационного канала в m-м приемном канале;
- вектор поправочного весового коэффициента k-го компенсационного канала в m-м приемном канале;
i - номер навигационного космического аппарата, i=1, 2, …, n;
m - номер приемного канала, m=1, 2, …, p;
k - номер компенсационного канала, k=1, 2, …, (р-1).
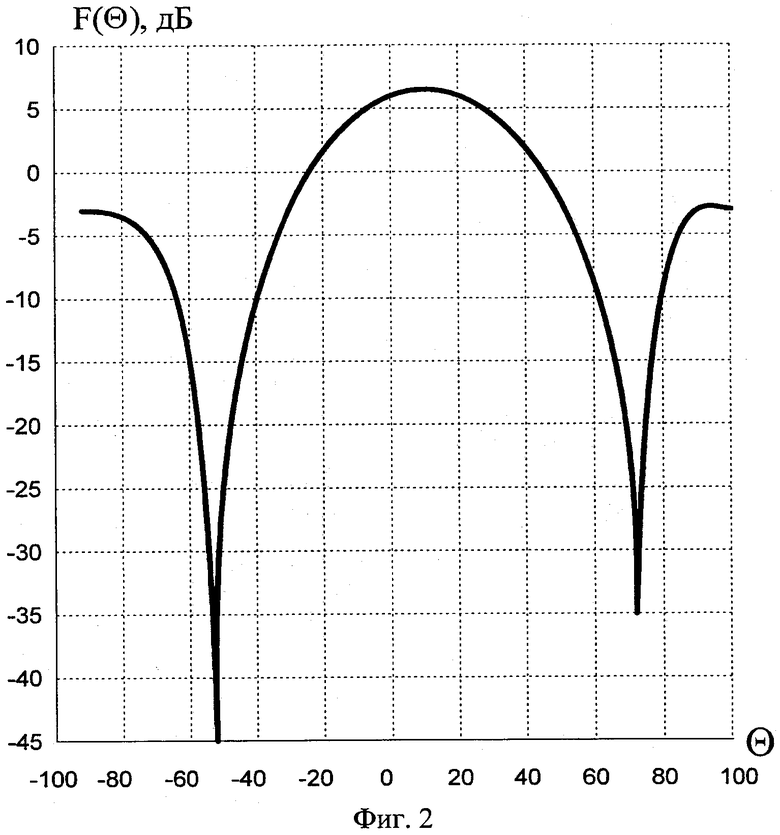
На фиг. 1 приведена структурная схема устройства определения угловой ориентации объекта в условиях воздействия широкополосных помех, реализующего предложенный способ с коррекцией КЧХ приемных каналов, на фиг. 2 приведена диаграмма направленности антенной системы после адаптации к двум постановщикам помех по результатам моделирования работы предложенного устройства.
Устройство определения угловой ориентации объекта, реализующее заявляемый способ в условиях воздействия широкополосных помех, содержит m приемных каналов, каждый из которых включает в себя последовательно соединенные: антенну 11 (12, …, 1m), аналоговый тракт 21 (22, …, 2m) и аналого-цифровой преобразователь (АЦП) 31 (32, …, 3m), выход которого подключен к соответствующему входу аппаратуры 4 подавления помех. Аппаратура 4 подавления помех содержит m блоков подавления помех 51 (52, …, 5m), входы каждого из которых соединены с m входами аппаратуры 4 подавления помех. Каждый из блоков 51 (52, …, 5m) подавления помех содержит сумматор 6, m-1 умножителей 7 и адаптивный процессор 8. Первые входы умножителей 7 и входы адаптивного процессора 8 соединены соответственно со 2-го по m-й входами блока 5m (каждого из блоков 5) подавления помех, а остальные входы (другими входами умножители 7) соединены с соответствующими выходами процессора 8. Сумматор 6 первым входом подключен к первому входу соответствующего блока подавления помех 5, а остальными соответственно к выходам умножителей 7 в этом блоке. Выходом сумматор 6 подключен к управляющему входу адаптивного процессора 8, к соответствующему входу блока 9 цифровой обработки сигналов и к соответствующему входу ПЭВМ 11. Выходы блока 9 цифровой обработки сигналов подключены к соответствующим входам блока 10 восстановления фазы, а входы коррекции фазовых соотношений блока 10 восстановления фазы соединены соответственно с выходами адаптивных процессоров 8 каждого из блоков 5. Устройство определения угловой ориентации объекта включает также в себя генератор помех 12, который соединен с входами аналоговых трактов 21 (22, …, 2m) и анализатором спектра 13. Для анализа компенсации уровня эталонной помехи выход анализатора спектра 13 соединен с ПЭВМ 11, выход которой соединен с корректирующим входом адаптивного процессора 8 каждого из блоков 5. Выходы блока восстановления фазы 10 соединены с соответствующими входами блока измерения угловой ориентации 14.
Сущность предлагаемого способа можно пояснить на примере работы устройства для определения угловой ориентации объекта в условиях воздействия преднамеренных помех, содержащего 3 приемных канала.
Перед тем, как производить определение угловой ориентации объекта в помеховой обстановке, предварительно калибруют приемные каналы путем коррекции их частотных характеристик, для чего устанавливается только эталонная пилот-помеха генератором помех 12, которая поступает на вход аналоговых трактов 2, где усиливается и преобразуется в сигналы промежуточной частоты, а затем поступает в АЦП 3. Пилот-помеха при прохождении через аналоговые тракты разных приемных каналов подвергается искажениям и, как следствие, межканальной декорреляции в этих каналах. С выходов АЦП 3 цифровые сигналы пилот-помехи поступают на входы аппаратуры 4 подавления помех и далее на три блока подавления помех 51, 52, 53, представляющие собой корреляционные автокомпенсаторы, для формирования весовых коэффициентов, перемножением их с сигналами помех компенсационных каналов и цифрового суммирования. В каждом из блоков 5 подавления помех производится расчет вектора весовых коэффициентов 

 - вектор весового коэффициента k-го компенсационного канала на l+1 шаге адаптации.
- вектор весового коэффициента k-го компенсационного канала на l+1 шаге адаптации.
Для рекуррентной оценки обратной корреляционной матрицы помех на управляющий вход адаптивного процессора 8 подается сигнал с выхода сумматора 6 в качестве обратной связи.
С генератора помех 12 пилот-помеха поступает и на вход анализатора спектра 13 для анализа ее уровня мощности в ПЭВМ 11 Вследствие межканальной декорреляции некомпенсированные остатки пилот-помехи с выхода сумматора 6 поступают на вход ПЭВМ 11. В ПЭВМ 11 рассчитывается и запоминается значение вектора поправочного весового коэффициента каждого откалиброванного компенсационного канала, который поступает на корректирующий вход адаптивного процессора 8 соответствующего канала. Целью расчета и формирования векторов поправочных весовых коэффициентов в ПЭВМ 11 является достижение минимального спектра мощности пилот-помехи калибруемых каналов.
Определение векторов поправочных весовых коэффициентов производится при одинаковой помехе на входе всех приемных каналов в установившемся режиме. Таким образом, производится дополнительная подстройка каналов, обеспечивая уменьшение расхождения их частотных характеристик и задержек сигналов.
После вычисления векторов поправочных весовых коэффициентов на вход приемных каналов подключают аддитивную смесь радионавигационных сигналов и преднамеренных помех, которые принимаются тремя разнесенными антеннами, где осуществляется дальнейшая пространственная компенсация преднамеренных помех с учетом уже вычисленных векторов поправочных весовых коэффициентов и выделение радионавигационных сигналов от навигационных космических аппаратов для определения углового положения объекта (курс, крен, тангаж).
Рассмотрим принцип подавления помехи на примере блока 51 подавления помех первого приемного канала.
Аддитивная смесь сигналов n навигационных космических аппаратов и преднамеренных широкополосных помех от постановщиков помех имеет вид:

Nmj - сигнал помехи, принятый в m -м приемном канале от j-го постановщика помех;
Ymi - принятый радионавигационный сигнал от i-го навигационного космического аппарата в m-м приемном канале;
i - номер навигационного космического аппарата, i=1, 2, … n;
m - номер приемного канала, m=1, 2, … р;
Сигнал на выходе сумматора 6 в первом приемном канале будет равен:

 - вектор входных сигналов;
- вектор входных сигналов;
Выражение для вектора весовых коэффициентов в этом приемном канале равно
 - вектор весовых коэффициентов компенсационных каналов для первого приемного канала;
- вектор весовых коэффициентов компенсационных каналов для первого приемного канала;
 - вектор поправочного весового коэффициента k-го компенсационного канала;
- вектор поправочного весового коэффициента k-го компенсационного канала;
Х1 - вектор входного сигнала первого приемного канала;
 - вектор входного сигнала k-го компенсационного канала, для первого приемного канала, при этом (*) означает комплексно сопряженную матрицу, а (Т) - транспонированную матрицу.
- вектор входного сигнала k-го компенсационного канала, для первого приемного канала, при этом (*) означает комплексно сопряженную матрицу, а (Т) - транспонированную матрицу.
Тогда выходной сигнал на выходе блока 51 подавления помех в случае дискретной оценки будет определяться путем решения следующей системы уравнений [3]:
l - номер шага адаптации;
 - обратная корреляционная матрица помех k-го компенсационного канала на l+1 шаге адаптации;
- обратная корреляционная матрица помех k-го компенсационного канала на l+1 шаге адаптации;
 - вектор весовых коэффициентов k-го компенсационного канала на l+1 шаге адаптации;
- вектор весовых коэффициентов k-го компенсационного канала на l+1 шаге адаптации;
m - номер приемного канала, m=1, 2, … р;
k - номер компенсационного канала, k=1, 2, … (р-1).
В остальных приемных каналах расчет вектора весовых коэффициентов  происходит аналогично.
происходит аналогично.
Далее с выхода сумматора 6 каждого блока 5 подавления помех очищенные от помех радионавигационные сигналы поступают на вход блока 9 цифровой обработки сигналов, где происходит разделение сигналов каждого из навигационных космических аппаратов, а также поиск, захват сигналов по частоте и задержке, частотная автоподстройка, синхронизация по метке времени и границе бита служебной информации, прием и декодирование служебной информации и измерение радионавигационных параметров сигнала. Кроме перечисленных задач, блок 9 цифровой обработки сигналов решает задачи вторичной обработки измеренных параметров, заключающиеся в определении координат навигационного космического аппарата на момент проведения измерений (задача размножения эфемерид) на основе принятой служебной информации, вычисления координат объекта.
Однако при подавлении помех изменяется фаза сигнала от каждого космического аппарата  . В результате искажения фазовых сдвигов при подавлении помех информация об угловой ориентации искажается и измерения становятся невозможными.
. В результате искажения фазовых сдвигов при подавлении помех информация об угловой ориентации искажается и измерения становятся невозможными.
Решается эта проблема путем коррекции измеренных фазовых сдвигов в блоке 10 восстановления фазы. Векторы весовых коэффициентов  , которые используются в аппаратуре 4 подавления помех, известны, поэтому есть возможность восстановить исходные фазовые соотношения и, таким образом, измерить угловую ориентацию. Сигналы, принятые от i-го навигационного космического аппарата, на входе блока 10 восстановления фазы в трех основных (измерительных) каналах будут иметь вид
, которые используются в аппаратуре 4 подавления помех, известны, поэтому есть возможность восстановить исходные фазовые соотношения и, таким образом, измерить угловую ориентацию. Сигналы, принятые от i-го навигационного космического аппарата, на входе блока 10 восстановления фазы в трех основных (измерительных) каналах будут иметь вид
 - выделенный радионавигационный сигнал, принятый от i-го навигационного космического аппарата соответственно в 1, 2, 3 приемном канале;
- выделенный радионавигационный сигнал, принятый от i-го навигационного космического аппарата соответственно в 1, 2, 3 приемном канале;
 - принятый радионавигационный сигнал от i-го навигационного космического аппарата соответственно в 1, 2, 3 приемном канале;
- принятый радионавигационный сигнал от i-го навигационного космического аппарата соответственно в 1, 2, 3 приемном канале;
 - вектор весового коэффициента 1-го компенсационного канала соответственно для 1, 2, 3 приемного канала;
- вектор весового коэффициента 1-го компенсационного канала соответственно для 1, 2, 3 приемного канала;
 - вектор весового коэффициента 2-го компенсационного канала соответственно для 1,2,3 приемного канала;
- вектор весового коэффициента 2-го компенсационного канала соответственно для 1,2,3 приемного канала;
 - вектор поправочного весового коэффициента соответственно 1,2-го компенсационного канала для соответствующего приемного канала;
- вектор поправочного весового коэффициента соответственно 1,2-го компенсационного канала для соответствующего приемного канала;
i - номер навигационного космического аппарата, i=1, 2, …, n;
После обработки в блоке восстановления фазы 10 сигналы поступают в блок измерения угловой ориентации 14, где производится оптимальная оценка начальных фаз сигналов, принятых антеннами, вычисляются значения фазовых сдвигов сигналов, принятых двумя пространственно-разнесенными антеннами φi по каждому из навигационных космических аппаратов, которые в дальнейшем используются для определения углового положения осей измеряемого объекта путем решения системы уравнений.
Необходимое число приемных каналов определяется функциональным назначением, а именно, для определения угловой ориентации объекта необходимо как минимум 3 приемных канала. С другой стороны, для подавления t помех требуется (t+1) приемных каналов. Таким образом, минимальное число приемных каналов равно трем, при этом можно подавить помехи от двух источников. При увеличении требований числа подавляемых помех число приемных каналов будет определяться этими требованиями. При этом все приемные каналы можно использовать для определения угловой ориентации.
Связь коэффициента подавления помех с КЧХ приемных каналов рассмотрим на простой схеме при использовании одного компенсационного канала, где коэффициентом подавления помехи определяется по известному выражению [4]:

ρ - коэффициент корреляции входных сигналов;
Корреляционные моменты (ковариация) входных помех можно выразить через частотные характеристики приемных каналов Km(f) и Sвx (f) - энергетический спектр помехи, опуская эффекты нелинейности и внутреннего шума, тогда коэффициент взаимной корреляции можно представить в виде

Очевидно, что ковариация, а следовательно, и коэффициент подавления зависят не только от частотной характеристики каналов приема, но и от спектральной плотности входной помехи. Поэтому различие частотных характеристик приемных трактов уменьшает межканальную корреляцию помех и эффективность их подавления. Наибольший вклад в формирование частотных характеристик аналоговых трактов вносят фильтры промежуточной частоты. Помимо основных параметров центральной частоты, полосы пропускания, избирательностью, ослаблением сигнала в полосе фильтра все они характеризуются формой вершины и коэффициентом прямоугольности амплитудно-частотной характеристики. Очевидно, что использование фильтров с одинаковыми формами амплитудно-частотной характеристики ведет к идентичности каналов и значение коэффициента подавления автокомпенсатора определяется в основном размахом разности амплитудной и фазовой частотных характеристик каналов приема в полосе сигнала, а также задержкой в каналах.
Необходимо отметить, что эффективность калибровки снижается в процессе эксплуатации, при воздействии дестабилизирующих факторов, таких, например, как изменение температуры, влажность, давление, механические вибрации, поэтому проведение мероприятий корректировки частотных характеристик приемных каналов следует производить перед каждым включением аппаратуры.
Использование изобретения позволит обеспечить определение угловой ориентации объектов при воздействии преднамеренных широкополосных помех с учетом декоррелирующих факторов приемных каналов.
Моделирование способа производилось на трехканальной приемной угломерной аппаратуре при постановке двух преднамеренных помех с угловых направлений β=0°, Θ=-54 и β=0°, Θ=72° в установившемся режиме работы.
Как показывают результаты моделирования (фиг. 2) в направлении двух постановщиков помех с учетом коррекции КЧХ, сформировались узкие провалы диаграммы направленности трехэлементной антенной решетки, достигающие уровня минус 35-45 дБ.
Таким образом, предлагаемый способ позволяет производить измерения угловой ориентации осей объекта по радионавигационным сигналам навигационных космических аппаратов при заданной погрешности измерения в условиях приема помеховых сигналов как естественного, так и преднамеренного происхождения.
Литература
1. ГЛОНАСС. Принципы построения и функционирования / под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и доп.: Радиотехника, 2010. - 800 с.
2. Пат. RU 2122217 Российская Федерация, МПК6 G01S 5/02. Способ угловой ориентации объекта по сигналам навигационных космических аппаратов / А.М. Алешечкин, Ю.Л. Фатеев, Чмых М.К.; заявитель ГОУ ВПО «Красноярский государственный технический университет», - №97107921/09; заявл. 15.05.1997; опубл. 20.11.1998.
3. Тяпкин В.Н., Лубкин И.А. Использование рекуррентных адаптивных алгоритмов для решения задачи подавления активно-шумовых помех в системах спутниковой связи. Вестник Сибирского гос. аэрокосмического ун-та им. акад. М.Ф. Решетнева. - 2010. - Вып. 2 (28). - С. 39-43.
4. В.Н. Харисов, С.Г. Быстраков, А.В. Пастухов, Р.Н. Сизов Метод задания требований к неидентичности каналов компенсаторов помех. / Радиотехника, №7, 2007. - 113 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2016 |
|
RU2618520C1 |
| Способ помехозащищенного приема сигналов систем спутниковой связи | 2020 |
|
RU2738409C1 |
| СПОСОБ И УСТРОЙСТВО ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ РЕЖЕКЦИИ ПОМЕХ В АППАРАТУРЕ ПОТРЕБИТЕЛЕЙ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2023 |
|
RU2804922C1 |
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |
| Способ определения угловой ориентации летательного аппарата | 2024 |
|
RU2821640C1 |
| Пространственно-распределенная система радиоподавления НАП ГНСС с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей | 2017 |
|
RU2649407C1 |
| Способ определения координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам | 2023 |
|
RU2811068C1 |
| Устройство пространственной селекции сигналов с компенсацией преднамеренных помех | 2018 |
|
RU2677931C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ (ВАРИАНТЫ) | 2000 |
|
RU2185637C1 |
Изобретение относится к области спутниковой навигации и может быть использовано для определения углового положения объектов в пространстве или на плоскости в условиях воздействия преднамеренных широкополосных помех. Достигаемый технический результат - повышение эффективности работы многоканальной угломерной навигационной аппаратуры в сложной помеховой обстановке. Указанный технический результат достигается тем, что в условиях помеховой обстановки перед измерением фазовых сдвигов определяют вектор поправочного весового коэффициента для каждого из приемных каналов путем их калибровки эталонной пилот-помехой. Сигнал помехи каждого из приемных каналов суммируют с сигналами помех остальных каналов, являющихся для него компенсационными, предварительно умноженными на соответствующий вектор весового коэффициента. При этом каждый вектор весового коэффициента вычисляют на основе рекуррентной оценки обратной корреляционной матрицы помех с учетом векторов поправочных весовых коэффициентов. Далее выделяют радионавигационные сигналы от n навигационных космических аппаратов и восстанавливают их исходные параметры в каждом приемном канале. 2 ил.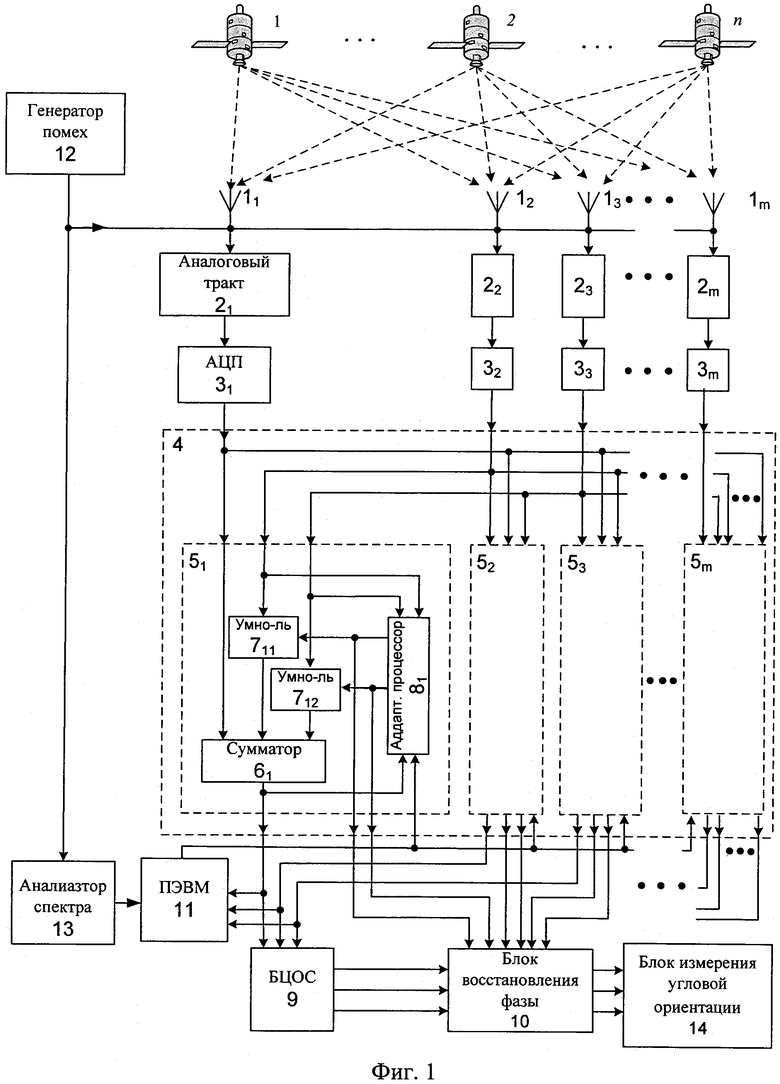
Способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов, основанный на приеме радионавигационных сигналов от n навигационных космических аппаратов двумя или более приемными каналами, антенны которых расположены так, что линии, проведенные через фазовые центры антенн, параллельны одной или двум осям объекта, измерении фазовых сдвигов между сигналами от каждого из n навигационных космических аппаратов между парами приемных каналов и определении углового положения объекта, отличающийся тем, что в условиях помеховой обстановки перед измерением фазовых сдвигов определяют вектор поправочного весового коэффициента для каждого из приемных каналов путем их калибровки эталонной пилот-помехой, сигнал помехи каждого из приемных каналов суммируют с сигналами помех остальных каналов, являющихся для него компенсационными, предварительно умноженными на соответствующий вектор весового коэффициента, которые вычисляют на основе рекуррентной оценки обратной корреляционной матрицы помех с учетом векторов поправочных весовых коэффициентов, выделяют радионавигационные сигналы от n навигационных космических аппаратов и восстанавливают их исходные параметры в каждом приемном канале путем решения системы уравнений
 где
где
 - выделенный радионавигационный сигнал, принятый от i-го навигационного космического аппарата в m-м приемном канале;
- выделенный радионавигационный сигнал, принятый от i-го навигационного космического аппарата в m-м приемном канале;
 - принятый радионавигационный сигнал от i-го навигационного космического аппарата в m-м приемном канале;
- принятый радионавигационный сигнал от i-го навигационного космического аппарата в m-м приемном канале;
 - вектор весового коэффициента k-го компенсационного канала в m-м приемном канале;
- вектор весового коэффициента k-го компенсационного канала в m-м приемном канале;
 - вектор поправочного весового коэффициента k-го компенсационного канала в m-м приемном канале;
- вектор поправочного весового коэффициента k-го компенсационного канала в m-м приемном канале;
i - номер навигационного космического аппарата, i=1, 2, …, n;
m - номер приемного канала, m=1, 2, …,p;
k - номер компенсационного канала, k=1, 2, …, (p-1).
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 1997 |
|
RU2122217C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА ПРИ ИСПОЛЬЗОВАНИИ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2492499C1 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2506542C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИИ | 2012 |
|
RU2504734C1 |
| US 2013275750034 A1, 17.10.2013 | |||
| US 5570097 A, 29.10.1996 | |||
| US 5841370 A, 24.11.1998 | |||
| Счетчик ледяных ядер | 1978 |
|
SU679904A1 |

