Изобретение относится к космической навигации и может быть использовано в системах получения информации о навигационных параметрах космических аппаратов геостационарных орбит (далее - КА) относительно геоцентрической системы координат (ГЦСК).
Известен способ инерциальной навигации КА, в соответствии с которым навигационные параметры, а именно координаты местоположения КА, а также составляющие векторов скорости и ускорения определяют интегрированием измеряемых в процессе движения КА составляющих указанных навигационных параметров [1, 2]. В любом устройстве для осуществления способа инерциальной навигации, как правило, осуществляется несколько измерений, для каждого из которых используются определенные устройства: а) при измерении углового направления - гироскопические приборы; б) при измерении линейного ускорения - подвешенные инертные массы в акселерометрах; в) при измерении времени - прецизионные источники стабилизированной частоты [3]. Основным недостатком такого способа является накапливающаяся с течением времени ошибка определения результирующих данных о значении вектора навигационного состояния КА и необходимость очень точного знания начальных значений координат КА.
Вследствие вышеизложенного, для коррекции определения местоположения КА следует периодически проводить визирование с Земли радаром или квантово-оптическими системами и расчетным путем определять его координаты. Однако в результате осуществления навигационных сверок с Земли не определяются угловые координаты КА и возникает большая зависимость от инфраструктур наземных комплексов управления (НКУ).
Известен также способ геомагнитной навигации КА, включающий в себя сопоставление физических параметров магнитного поля, измеренных датчиками геомагнитной информации на борту объекта, с аналогичными параметрами магнитного поля, распределение которых в пространстве относительно Земли заранее известно (априорная информация). Априорная информация о магнитном поле Земли фиксируется на географических картах с учетом высоты полета, а также в таблицах, в системах памяти ЭВМ или в аналитической форме. Устройство для осуществления этого способа (система геомагнитной навигации) включает в себя датчики геомагнитной информации, датчики угловой информации, системы сравнения, коррекции, вычисления и выдачи выходных сигналов [4]. Недостатком способа геомагнитной навигации является наличие изменений в широких пределах информационных свойств магнитного поля Земли в зависимости от географической широты и расстояния от планеты и, следовательно, возможное использование данного способа только при небольшом удалении объекта от Земли.
Известен также способ вычисления зенитных расстояний двух звезд на основе измерений углов ориентации КА и ориентации оптических осей астровизирующих устройств относительно связанной системы координат. Определяют навигационные параметры КА при статической обработке измерительной информации за мерный участок. В каждом цикле дополнительно уточняют углы ориентации. На основе уточненных значений углов и информации об ориентации оптических осей астровизирующих устройств уточняют значения зенитных расстояний звезд. Используют уточненные значения при решении навигационной задачи в текущий период.
Общим недостатком решения навигационной задачи с помощью перечисленных способов автономной навигации является низкая точность определения параметров движения центра масс КА, обусловленная инструментальными и методическими погрешностями бортовых навигационных измерений, неполным учетом в навигационных алгоритмах сил, фактически воздействующих на КА в полете, погрешностями физических констант, определяющих закон движения [5].
Наиболее близким к заявляемому является способ угловой ориентации объекта по радионавигационным сигналам навигационных космических аппаратов (НКА), основанный на приеме сигналов от n НКА двумя или более антенно-приемными устройствами, расположенными параллельно одной или двум осям объекта, выделении сигнала с частотой Доплера, определении набега фаз за интервал времени измерения, определении координат и углового положения объекта [6].
Недостатком известного способа является невозможность определения ориентации КА, т.к. область применения радионавигационных сигналов НКА ограничена и направлена на потребителей навигационной информации Земли (форма диаграммы направленности бортовых антенн НКА ограничивает зону действия глобальных навигационных спутниковых систем околоземным космическим пространством).
В основу изобретения положена задача высокоточного измерения координат и угловой ориентации осей космического аппарата геостационарной орбиты, используя сигналы бортовой аппаратуры межспутниковых измерений (БАМИ) навигационных космических аппаратов ГЛОНАСС.
Поставленная задача решается тем, что в способе угловой ориентации объекта, по которому принимают сигналы от n навигационных космических аппаратов (НКА) двумя или более антенно-приемными устройствами, расположенными параллельно одной или двум осям объекта, выделяют сигналы с частотой Доплера, измеряют фазовые сдвиги между парами антенно-приемных устройств и определяют угловое положение объекта за интервал времени измерения, согласно изобретению в качестве сигналов с частотой Доплера используют сигналы межспутниковых измерений бортовой аппаратуры НКА, а угловое положение объекта определяют за интервал времени, в течение которого объект находится в области радионавигационного поля сигналов межспутниковых измерений бортовой аппаратуры не менее чем от четырех НКА.
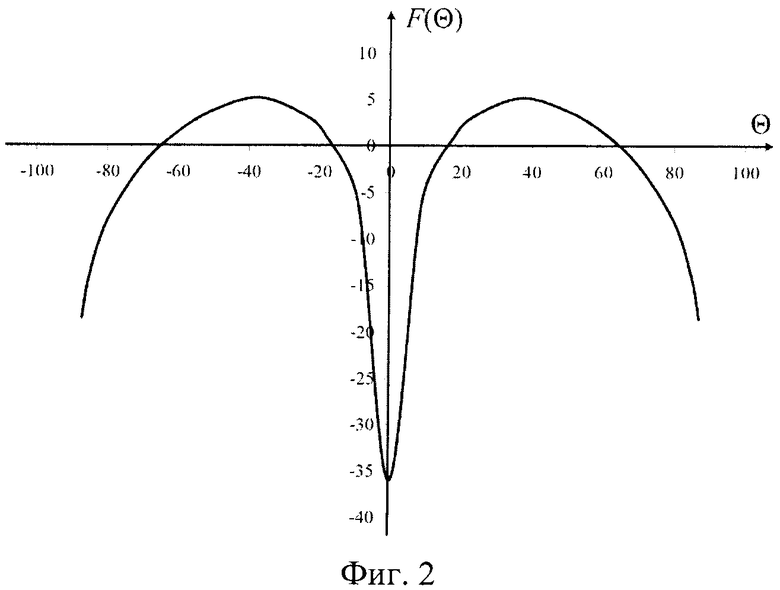
На фиг. 1 отображена область распространения сигналов БАМИ НКА, на фиг. 2 приведен примерный вид диаграммы направленности антенной системы БАМИ НКА «Глонасс-М», на фиг. 3 - график количества одновременно наблюдаемых НКА по каналу БАМИ: ГЛОНАСС (сплошной) и GPS (прерывистой).
Сущность изобретения заключается в следующем.
Классические методы определения местоположения при помощи глобальных навигационных спутниковых систем (ГНСС) предполагают наличие одномоментных измерений не менее чем от четырех НКА одной системы (ГЛОНАСС или GPS), что обусловлено количеством неизвестных - 3 координаты X, Y, Z и временная задержка Δt. При использовании измерений от двух ГНСС минимальное количество НКА будет составлять не менее 5 (2 НКА одной и 3 НКА другой системы). Количество неизвестных в этом случае возрастает до 5, т.е. 3 координаты X, Y, Z и 2 временные задержки Δt1 и Δt2, обусловленные тем, что шкалы времени различных ГНСС не синхронизированы между собой.
В общем случае, при определении угловых координат объекта используют результаты измерений косинусов углов между вектором-базой объекта и вектором-направлением на i-й НКА ГНСС. Фазовый сдвиг сигнала НКА, принимаемого на две разнесенные антенны объекта, и косинус угла между вектором-базой и вектором-направлением на НКА связаны выражением:

где λ - длина волны сигнала НКА,
φ - фазовый сдвиг сигналов НКА между разнесенными антеннами (антенно-приемными устройствами) объекта,
B - длина базы антенно-приемных устройств объекта,
α - угол между вектором-базой объекта и вектором-направлением на НКА.
Выражение (1) является уравнением интерферометрических методов (использование разнесенных в пространстве приемных антенн) и широко применяется в теории фазовых пеленгаторов, многобазовых интерферометров и антенных решеток [7, 8].
При определении угловых координат КА (объекта), направляющие косинусы вектора-базы могут быть определены из уравнения на основе скалярного произведения векторов:

где λi - длина волны сигнала БАМИ i-го НКА;
Ф - фазовый сдвиг сигналов БАМИ НКА между парами антенно-приемных устройств КА;
ΔR - разность хода сигналов БАМИ НКА между парами антенно-приемных устройств КА;
X, Y, Z - координаты вектора-базы КА (объекта);
kxi,yi,zi - направляющие косинусы векторов-направлений между КА и i-м НКА, равные:

где x, y, z - координаты KA в ГЦСК;
xci, yci, zci - координаты i-го НКА в ГЦСК;
 - расстояние между КА и i-m НКА;
- расстояние между КА и i-m НКА;
i - номер навигационного космического аппарата, i=1, 2, …,n.
Координаты КА определяются на основе измерений задержек сигналов БАМИ, принятых с борта каждого НКА. Для проведения таких измерений сигналы БАМИ каждого НКА модулируются псевдослучайными последовательностями (ПСП) и имеют схожую структуру с радионавигационными сигналами. Отличием является длительность бита цифровой информации, которая в сигналах БАМИ составляет 1 мс, а в радионавигационных сигналах - 20 мс.
В БАМИ НКА ГЛОНАСС используется частотное, кодовое и временное разделение сигналов. Для передачи сигналов БАМИ используется 7 литерных частот, причем на каждой литерной частоте используется своя псевдослучайная последовательность. Длительность сеанса составляет 20 с, который разделен на 4 временных интервала по 5 с. В каждом временном интервале производится передача сигнала двумя антиподными НКА в каждой плоскости (на передачу одновременно работают 6 НКА, каждый своим модулирующим кодом ПСП), остальные НКА в этом временном интервале ведут прием сигнала. БАМИ работает по жесткой циклограмме. На каждом НКА 5 секунд - передача сигнала в своем временном интервале, 15 секунд - прием. На каждом часовом интервале БАМИ работает 15 минут, остальные 45 минут - перерыв.
Таким образом, проведение навигационных измерений по сигналам БАМИ мало чем отличается, по существу, от измерений по радионавигационным сигналам. По структуре приемник сигналов межспутниковой радиолинии имеет много общего с приемником радионавигационных сигналов, что обусловлено схожей структурой сигналов и функциональным назначением. В части канала БАМИ должны решаться задачи измерения текущих навигационных параметров с учетом особенностей формата сигналов в канале БАМИ.
Так как угловое положение КА определяют за интервал времени, в течение которого КА находится в области радионавигационного поля сигналов БАМИ не менее чем от четырех НКА, возможность угловой ориентации КА ограничивается из расчета продолжительности и количества, одновременно наблюдаемых НКА. Диаграмма направленности антенны БАМИ НКА конусообразная с провалом, направленным на центр Земли, что обеспечивает одинаковую мощность сигналов, принимаемых от всех видимых НКА. БАМИ НКА ГЛОНАСС формирует два максимума диаграммы направленности антенны в диапазоне углов от 18° до 70° (фиг. 2) от нормали каждый [9]. Для НКА GPS предполагается, что нижняя и верхняя границы диаграммы направленности антенны, излучающей сигналы БАМИ, составляют 16,2° и 32,5° соответственно [10]. Исходя из форм диаграмм направленности антенн БАМИ и областью распространения сигналов БАМИ данный способ угловой ориентации эффективен для КА, высота орбиты которых близка к геостационарной и выше.
Для примера рассмотрим формирование радионавигационного поля сигналов БАМИ для КА геостационарных орбит, отдельно по каждой из ГНСС и их совместной группировкой. Все расчеты будем проводить в геоцентрической системе координат (ГЦСК) OXYZ, центр которой совмещен с центром масс Земли, ось OZ направлена по оси вращения Земли в сторону Северного полюса, ось OX лежит в плоскости земного экватора и связана с Гринвичским меридианом, ось OY дополняет систему координат до правой (фиг. 1). В ГНСС ГЛОНАСС геоцентрическая подвижная система координат определена как ПЗ-90, а в ГНСС GPS - как WGS-84. На фиг. 1 показано взаимное расположение НКА и КА на геостационарных орбитах (заштрихованная область - диаграмма направленности БАМИ НКА). Учитывая, что высота орбиты НКА ГЛОНАСС в геоцентрической системе координат составляет 25478000 м, НКА GPS - 26578000 м, КА геостационарных орбит - 42164000 м, радиус Земли - 6378000 м и используя элементарные геометрические построения и теорему синусов, найдем продолжительность и количество одновременно наблюдаемых НКА по каналу БАМИ. Положение НКА ГЛОНАСС и GPS на орбите рассчитываются на основе альманахов, публикуемых в открытом доступе. Алгоритмы расчета приведены в соответствующих Интерфейсных контрольных документах.
Результаты расчетов продолжительности и количества, одновременно наблюдаемых НКА по каналу БАМИ на восьмисуточном интервале, приведены в табл. 1 и на графиках (фиг. 3) с учетом прерывистого характера излучения. Расчет проводился на восьмисуточном интервале (17 витков НКА ГЛОНАСС), так как именно он является интервалом повторяемости орбиты НКА ГЛОНАСС.
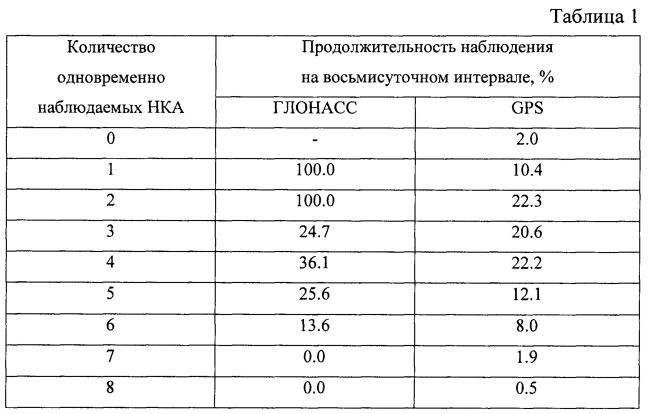
Как видно из результатов расчетов, представленных в табл. 1 и на фиг. 3, навигационные определения КА по сигналам БАМИ НКА возможны даже по одной системе ГЛОНАСС (продолжительность радиовидимости не менее 4-х НКА составляет 75.3% от восьми суток). При этом точность определения пространственной ориентации КА будет составлять не более 20-ти угловых минут при базе интерферометра 0.7 м, а погрешность измерения абсолютных координат менее 10 м.
По результатам исследований можно сделать вывод о целесообразности использования сигналов БАМИ для высокоточной навигации КА, что существенно повышает точность определения местоположения и пространственной ориентации КА интерферометрическими методами, особенно в условиях его автономного функционирования без поддержки наземного комплекса управления.
Источники информации
1. Авторское свидетельство СССР №1098383, опубл. 23.05.85 г.
2. В. Риглей, Р. Вудбери, Дж. Говорка. Инерциальная навигация, пер. с анг., под ред. Г.О. Фридлендера. - М.: Издательство иностранной литературы, 1958 г.
3. Навигация, наведение и стабилизация в космосе, кол. авторов (Ч.С. Дрейпер, У. Ригли и др.), под ред. Дж.Э. Миллера, пер. с англ., М.: Машиностроение, 1970 г.
4. Б.З. Михлин, В.П. Селезнев, А.В. Селезнев. Геомагнитная навигация. - М.: Машиностроение, 1976 г.
5. Патент RU 2171969, МПК6 G01C 21/24. опубл. 10.08.2001.
6. Патент RU 2122217, МПК6 G01S 5/02. опубл. 20.11.1998.
7. Белов В.И. Теория фазовых измерительных систем. / Под ред. Г.Н. Глазова. - Томск: Томская государственная академия систем управления и радиоэлектроники, 1994. - 144 с.
8. Денисов В.П., Дубинин Д.В. Фазовые радиопеленгаторы: Монография. - Томск: Томский государственный университет систем управления и радиоэлектроники, 2002. - 251 с.
9. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. - Изд. 4-е, перераб. - М.: Радиотехника, 2010.
10. GNSS Satellite Autonomous Integrity Monitoring (SAIM) using inter-satellite measurements / Xu, H., Wang, J., Zhan, X. // AdvancesinSpaceResearch. - Vol. 47, Issue 7. - April 2011. - P. 1116-1126.

Изобретение относится к космической навигации и может быть использовано в системах получения информации о навигационных параметрах космических аппаратов (КА) на геостационарных орбитах (ГСО) относительно геоцентрической системы координат (ГЦСК). Технический результат заключается в высокоточном измерении координат и угловой ориентации осей космических аппаратов геостационарных орбит по сигналам бортовой аппаратуры межспутниковых измерений (БАМИ) навигационных космических аппаратов (НКА) ГЛОНАСС. Указанный результат достигается тем, что в качестве сигналов с частотой Доплера используют сигналы межспутниковых измерений бортовой аппаратуры НКА, а угловое положение объекта (КА) определяют за интервал времени, в течение которого объект находится в области радионавигационного поля сигналов БАМИ не менее чем от четырех НКА. 3 ил., 1 табл.
Способ угловой ориентации объекта, по которому принимают сигналы от n навигационных космических аппаратов двумя или более антенно-приемными устройствами, расположенными параллельно одной или двум осям объекта, выделяют сигналы с частотой Доплера, измеряют фазовые сдвиги между парами антенно-приемных устройств и определяют угловое положение объекта за интервал времени измерения, отличающийся тем, что в качестве сигналов с частотой Доплера используют сигналы межспутниковых измерений бортовой аппаратуры навигационных космических аппаратов, а угловое положение объекта определяют за интервал времени, в течение которого объект находится в области радионавигационного поля сигналов межспутниковых измерений бортовой аппаратуры не менее чем от четырех навигационных космических аппаратов.
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 1997 |
|
RU2122217C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2004 |
|
RU2276384C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТОВ В ПРОСТРАНСТВЕ, ДАЛЬНОСТИ, ПЕЛЕНГА, КООРДИНАТ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152625C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ (ВАРИАНТЫ) | 2000 |
|
RU2185637C1 |
| Приемное устройство вибрационного магнитометра | 1977 |
|
SU679901A1 |
| JP 2013200174 A, 03.10.2013 | |||
| US 5296861 A, 22.03.1994. | |||

