ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[01] По этой заявке испрашиваются приоритет заявки на патент США №14/710373 под названием ʺOcean bottom systemʺ, которая была подана 12 мая 2015 года, и приоритет предварительной заявки США №61/992684 под названием ʺOcean bottom systemʺ, которая была подана 13 мая 2014 года, и обе они для всех целей полностью включены в эту заявку путем ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область техники
[02] В общем, настоящее изобретение относится к регистрации сейсмических данных, а более конкретно, к морским донным системам регистрации сейсмических данных.
Описание предшествующего уровня техники
[03] Нефтехимические продукты, такие как нефть и газ, повсеместно распространены в обществе и могут быть обнаружены во всем, начиная от бензина и кончая детскими игрушками. Вследствие этого потребность в нефти и газе остается высокой. Для удовлетворения этой высокой потребности важно обнаруживать в Земле запасы нефти и газа. Ученые и инженеры проводят исследования, используя, помимо всего прочего, сейсмические и другие волновые способы разведки для обнаружения в Земле нефтяных и газовых коллекторов. Эти способы сейсмической разведки часто включают в себя направление излучения сейсмической энергии в Землю при использовании сейсмического источника энергии (например, динамита, воздушных пушек, вибраторов и т.д.) и мониторинг отклика Земли на сейсмический источник одним или несколькими приемниками, чтобы образовать изображение геологической среды Земли.
[04] Общепринятые морские сейсмические исследования обычно включают в себя буксировку сейсмическим судном одной или нескольких сейсмических кос, содержащих множество приемников. Каждый приемник включает в себя, например, датчик давления и/или датчик движения частиц в непосредственной близости друг к другу. Датчик давления может быть, например, гидрофоном, который обеспечивает регистрацию измерений скалярного давления сейсмического волнового поля. Датчик движения частиц может быть, например, трехкомпонентным гидрофоном, который обеспечивает регистрацию измерений векторной скорости сейсмического волнового поля. При наблюдении отраженного сейсмического волнового поля, обнаруживаемого приемником (приемниками) во время исследования, можно регистрировать геофизические данные, соответствующие отраженным сигналам, и эти сигналы можно использовать для формирования изображения, показывающего строение Земли вблизи места исследования.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
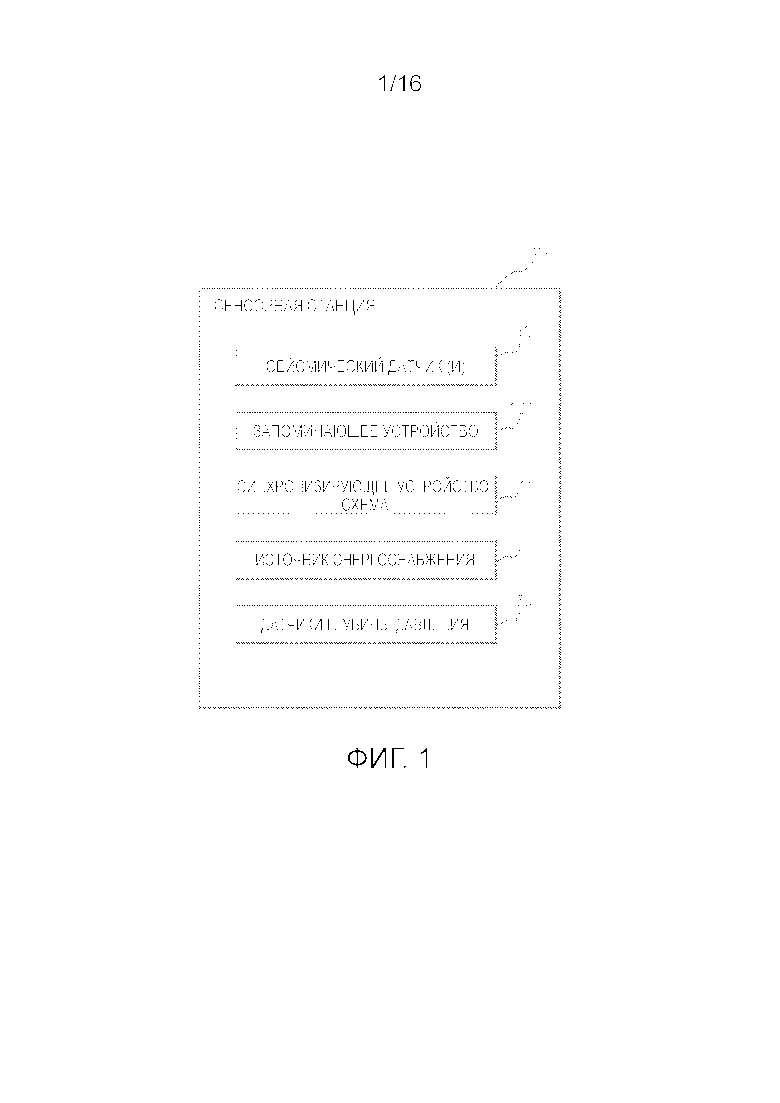
[05] фиг. 1 - блок-схема, иллюстрирующая показанные для примера компоненты в морской донной сейсмической сенсорной станции согласно варианту осуществления изобретения;
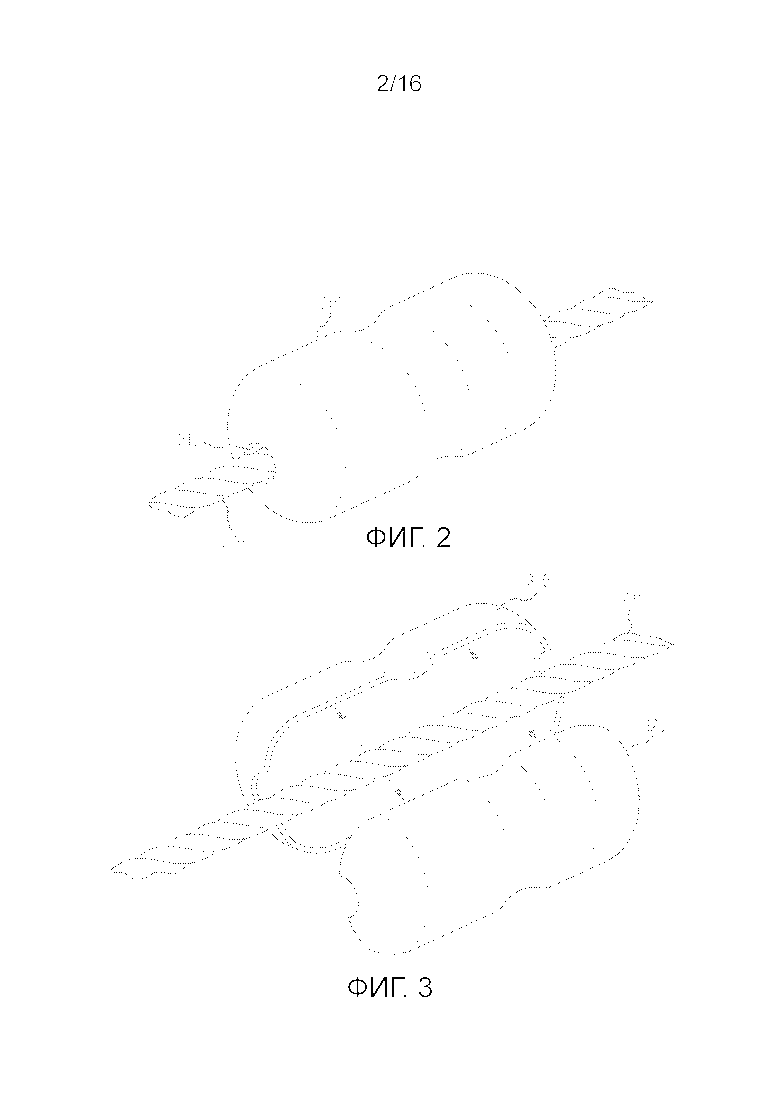
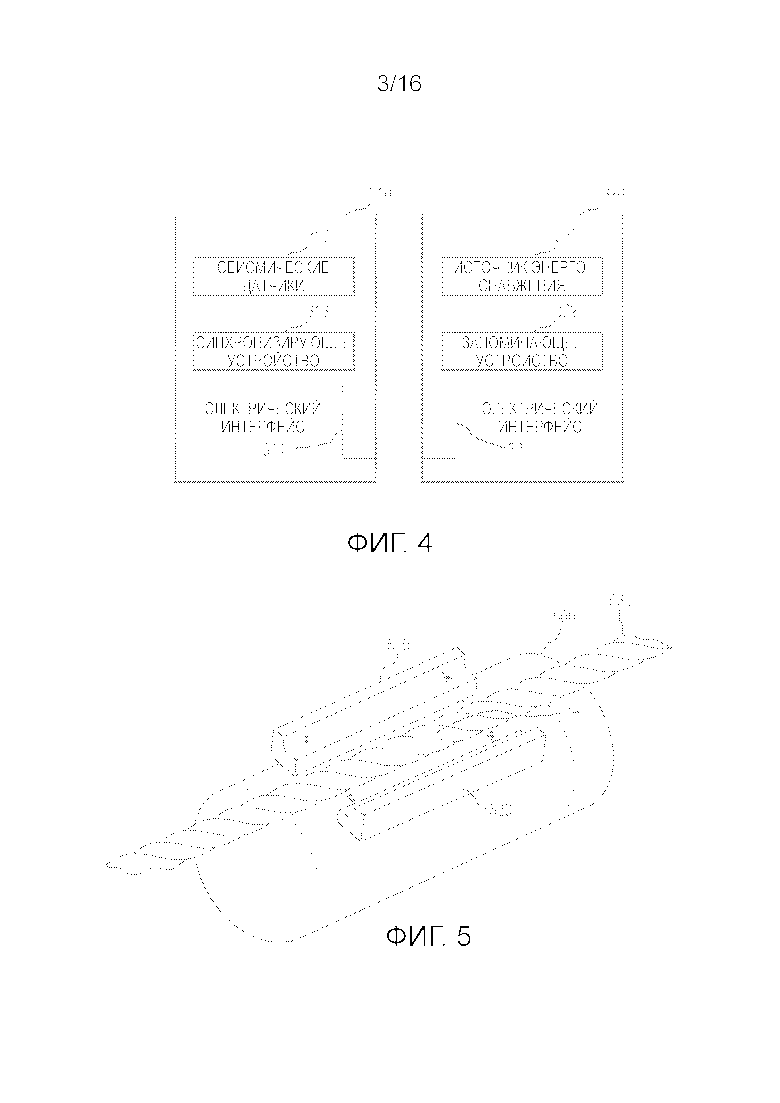
[06] фиг. 2-5 - виды корпусов сейсмической сенсорной станции, например сенсорной станции из фиг. 1, согласно варианту осуществления изобретения;
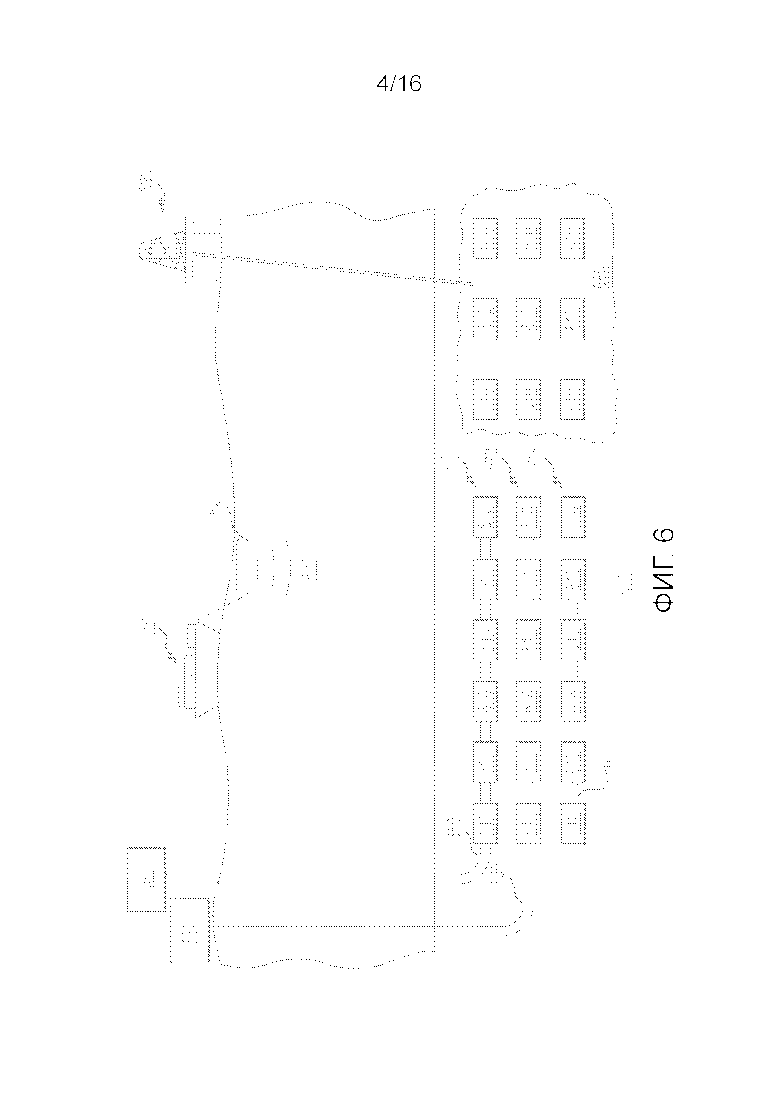
[07] фиг. 6 - иллюстрация показанного для примера сейсмического исследования согласно варианту осуществления изобретения;
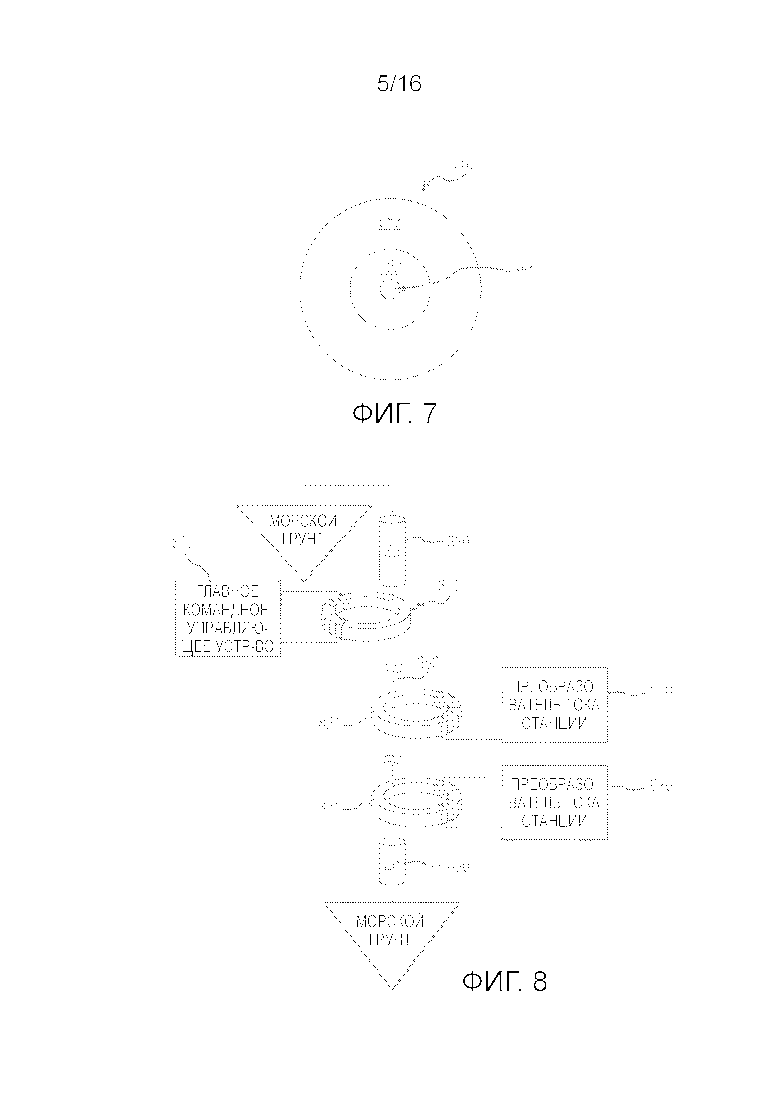
[08] фиг. 7 - поперечное сечение показанного для примера кабеля согласно варианту осуществления изобретения;
[09] фиг. 8 - схема системы передачи сигналов по электропроводящему тросу;
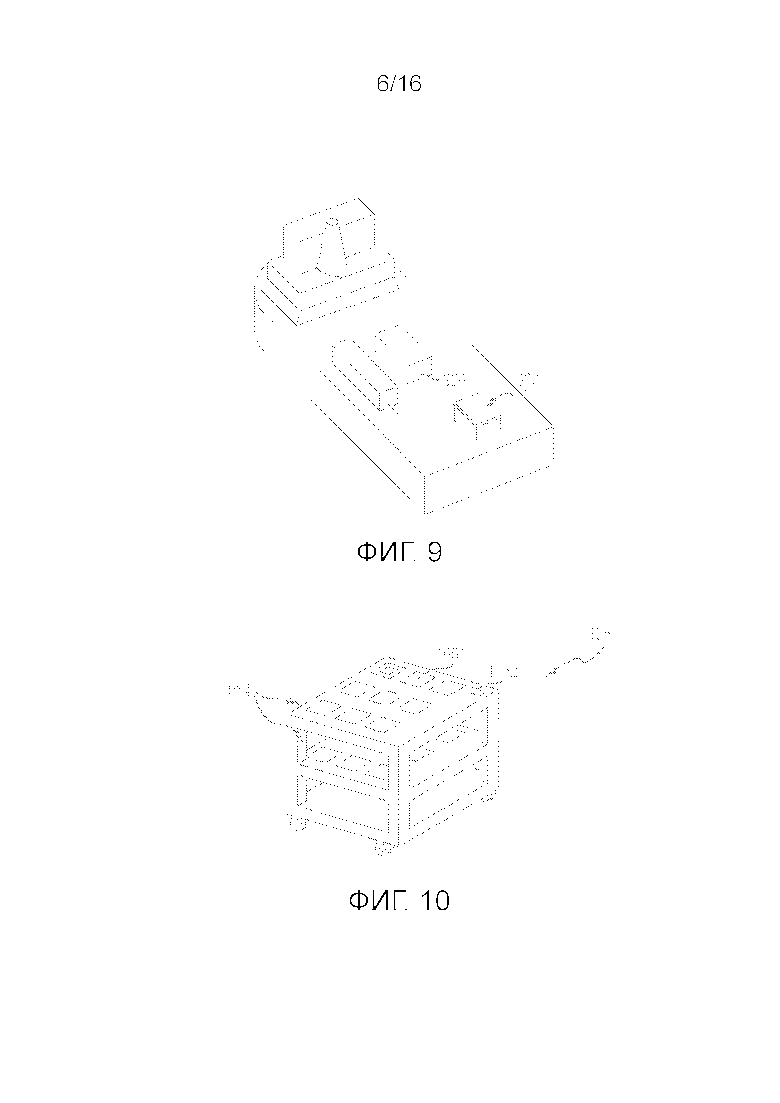
[10] фиг. 9 - вид показанной для примера кормовой палубы судна для развертывания сенсорной станции согласно варианту осуществления изобретения;
[11] фиг. 10 - вид показанной для примера тележки согласно варианту осуществления изобретения;
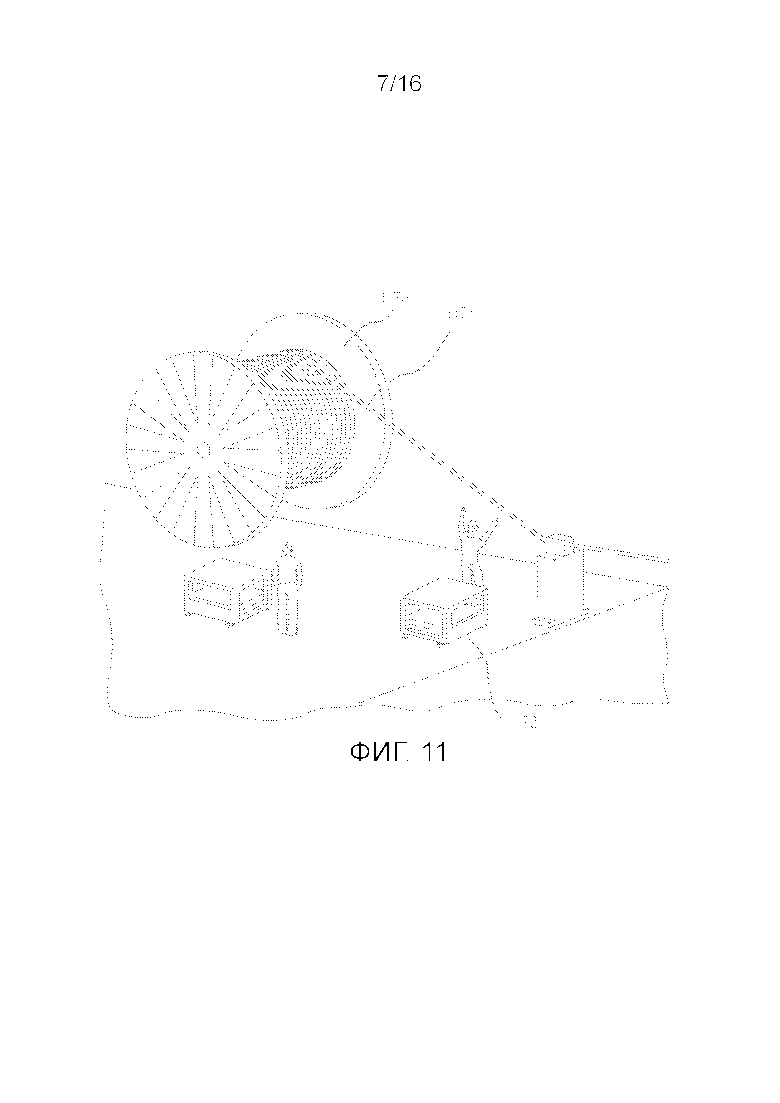
[12] фиг. 11 - вид перевалочного участка на кормовой палубе сейсмического судна согласно варианту осуществления изобретения;
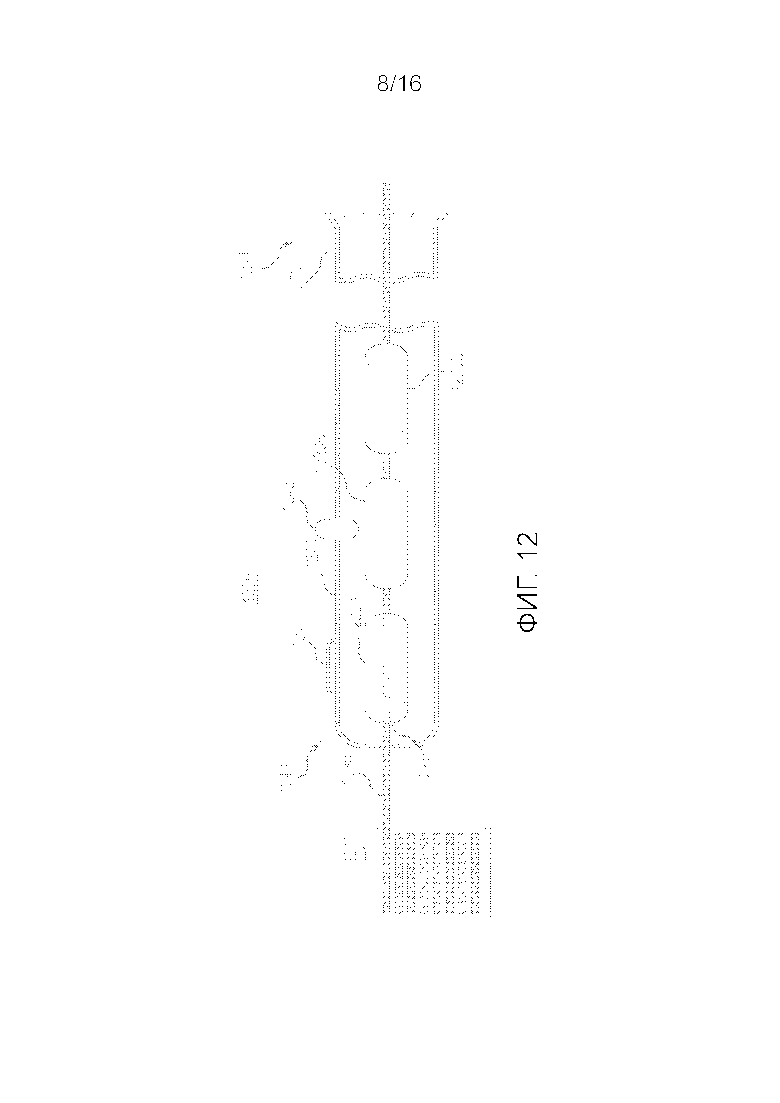
[13] фиг. 12 - вид показанной для примера автоматизированной системы развертывания морских донных сейсмических сенсорных станций согласно варианту осуществления изобретения;
[14] фиг. 13A-D - иллюстрация показанного для примера развертывания морской донной сейсмической сенсорной системы согласно варианту осуществления изобретения;
[15] фиг. 13E-F - иллюстрация способа соединения сенсорной станции с тросом согласно варианту осуществления изобретения;
[16] фиг. 14 - вид еще одной системы развертывания сейсмических сенсорных станций согласно варианту осуществления изобретения;
[17] фиг. 15 - иллюстрация еще одного варианта осуществления системы морских донных сейсмических сенсорных станций согласно варианту осуществления изобретения;
[18] фиг. 16 - вид показанной для примера тележки согласно варианту осуществления изобретения;
[19] фиг. 17 - иллюстрация развертывания/возврата сенсорного тросового сегмента согласно варианту осуществления изобретения;
[20] фиг. 18 - иллюстрация показанного для примера способа соединения сенсорного кабельного сегмента, содержащего множество сейсмических сенсорных станций, с несущим кабелем;
[21] фиг. 19 - иллюстрация морской донной сейсмической сенсорной системы согласно еще одному варианту осуществления изобретения;
[22] фиг. 20А-С - иллюстрация показанных для примера структур компонентов на установочных местах распределенной сенсорной системы согласно варианту осуществления изобретения; и
[23] фиг. 21 - функциональная схема системы управления развертыванием согласно варианту осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[24] Ниже делается ссылка на варианты осуществления изобретения. Однако следует понимать, что изобретение не ограничено конкретными описываемыми вариантами осуществления. Вместо этого любая комбинация нижеследующих признаков и элементов независимо от того, относится ли она к различным вариантам осуществления или нет, предполагается возможной для реализации и применения в изобретении. Кроме того, различные варианты осуществления изобретения обладают многочисленными преимуществами перед предшествующим уровнем техники. Однако, хотя варианты осуществления изобретения позволяют получать преимущества по сравнению с другими возможными решениями и/или по сравнению с предшествующим уровнем техники, изобретение не ограничивается определенным вариантом осуществления изобретения независимо от того, достигается или нет конкретное преимущество. Поэтому нижеследующие аспекты, признаки, варианты осуществления и преимущества являются только иллюстративными и не считаются элементами или ограничениями прилагаемой формулы изобретения за исключением случаев, когда это прямо изложено в пункте формулы (формуле) изобретения. Точно так же, ссылка на «изобретение» не должна толковаться как обобщение какого-либо предмета изобретения, раскрытого в этой заявке, и не должна считаться элементом или ограничением прилагаемой формулы изобретения за исключением случаев, когда это прямо изложено в пункте формулы (формуле) изобретения.
[25] Один вариант осуществления реализуется как программный продукт, предназначенный для использования с компьютеризированной системой. Программой (программами) программного продукта определяются функции вариантов осуществления (в том числе способов, описанных в этой заявке) и она может содержаться на различных машиночитаемых носителях данных. Информация на примерных машиночитаемых носителях данных включает в себя, но без ограничения: (i) информацию, постоянно сохраняемую на неперезаписываемых носителях данных (например, постоянных запоминающих устройствах в компьютере, таких как компакт-диск, доступный только для чтения, читаемый с помощью привода для компакт-дисков); (ii) изменяемую информацию, сохраняемую на перезаписываемых носителях данных (например, дискетах в приводе дискет или жестком диске); и (iii) информацию, передаваемую к компьютеру по среде связи, такой как беспроводная сеть. В частности, последний вариант осуществления включает в себя информацию, загружаемую из Интернета и других сетей. На таких машиночитаемых носителях данных представлены варианты осуществления настоящего изобретения, реализуемые при исполнении машиночитаемых команд, которые управляют функциями настоящего изобретения.
[26] В общем случае программы, выполняемые для реализации вариантов осуществления изобретения, могут быть частью операционной системы или конкретным приложением, компонентом, программой, модулем, объектом или последовательностью команд. Компьютерная программа настоящего изобретения обычно состоит из большого числа команд, которые преобразуются собственным компьютером в машиночитаемый формат и, следовательно, представляют собой исполнимые команды. Кроме того, программы состоят из переменных и структур данных, которые содержатся локально в программе или находятся в памяти или в устройствах хранения данных. Кроме того, различные программы, описываемые в дальнейшем, могут быть идентифицированы на основании применения, для которого они реализуются в конкретном варианте осуществления изобретения. Однако следует понимать, что любая конкретная программная номенклатура, которая следует из этого, используется только для удобства, и поэтому изобретение не следует ограничивать использованием только любого конкретного применения, идентифицированного и/или выраженного такой номенклатурой.
[27] На фиг. 1 представлена блок-схема, иллюстрирующая примеры компонентов в морской донной сейсмической сенсорной станции 100 согласно варианту осуществления изобретения. Как показано на фиг. 1, сенсорная станция 100 может включать в себя один или несколько сейсмических датчиков 110 и запоминающее устройство 120. Сейсмические датчики 110 могут включать в себя любое количество и комбинацию датчиков, таких как гидрофоны, геофоны, акселерометры или подобные. В одном варианте осуществления датчики 110 могут включать в себя трехкомпонентный (3К) датчик, выполненный с возможностью измерения трех пространственных составляющих сейсмических волн. В некоторых вариантах осуществления сейсмические датчики 110 могут включать в себя цифровой датчик, например, акселерометр на основе микроэлектромеханической системы (МЭМС). Примеры цифровых датчиков раскрыты в патенте США №6883638, поданном 16 марта 2009 года Peter Maxwell и соавторами, под названием ʺAccelerometer transducer used for seismic prospectingʺ. Раскрытие этого патента полностью включено в настоящую заявку путем ссылки. Использование цифровых датчиков может дать несколько преимуществ, в том числе может позволить выполнять автоматическую калибровку, иметь меньший разброс параметров датчиков, лучшую частотную характеристику, одинаковую характеристику при любой ориентации, малоразмерное и компактное конструктивное оформление, наряду с прочим.
[28] В одном варианте осуществления сейсмические датчики 110 могут включать в себя пьезоэлектрические датчики. Примеры пьезоэлектрических датчиков раскрыты в заявке №13/984255 на патент США и заявке №13/984266 на патент США, обе поданы 7 февраля 2012 года Ken Kan Deng и обе под названием ʺMethod and apparatus for sensing underwater signalsʺ. Раскрытия этих обеих заявок на патенты полностью включены в настоящую заявку путем ссылки.
[29] Предпочтительно, чтобы запоминающее устройство 120 было оперативным запоминающим устройством достаточно большой емкости для хранения заданного объема сейсмических данных. Хотя запоминающее устройство 120 показано как одно целое, следует понимать, что запоминающее устройство 120 может фактически содержать множество модулей и что запоминающее устройство 120 может иметь многочисленные уровни, от быстродействующих регистров и кэш-памяти до медленнодействующих кристаллов динамического оперативного запоминающего устройства большей емкости.
[30] В одном варианте осуществления сенсорная станция 100 может также включать в себя синхронизирующее устройство/схему 130 и источник 140 энергоснабжения. В одном варианте осуществления синхронизирующее устройство 130 может быть резонатором, кристаллом или осциллятором, выполненным с возможностью генерации синхронизирующего сигнала для регистрации сейсмических данных. В одном варианте осуществления синхронизирующее устройство 130 может быть выполнено с возможностью независимой генерации тактового сигнала для сейсмической сенсорной станции. В других вариантах осуществления синхронизирующее устройство может быть выполнено с возможностью приема внешнего тактового сигнала с главного генератора тактовых импульсов и генерации тактового сигнала для сейсмической сенсорной станции 100 на основании принимаемого внешнего тактового сигнала.
[31] Источник 140 энергоснабжения может быть выполнен с возможностью снабжения электроэнергией датчиков 110, запоминающего устройства 120 и других электронных схем станции 100. В одном варианте осуществления источник 140 энергоснабжения может быть аккумулятором достаточно большой емкости, предназначенным для снабжения электроэнергией станции 100 на протяжении всего времени сейсмического исследования. Как будет описано более подробно ниже, в другом варианте осуществления электроэнергия может поставляться к сенсорной станции 100 извне.
[32] В одном варианте осуществления сейсмическая сенсорная станция 100 может включать в себя датчики 150 глубины и/или давления. Датчики 150 глубины или давления могут быть выполнены с возможностью определения глубины сейсмической сенсорной станции во время развертывания и/или возврата. В одном варианте осуществления пороговая глубина может быть задана для переключения сейсмической сенсорной станции в состояние «включено» или «выключено». Например, во время развертывания датчики, запоминающее устройство и другие схемы сейсмической сенсорной станции 100 могут не снабжаться электроэнергией до достижения пороговой глубины (измеряемой датчиками 150 глубины/давления). Аналогично этому, во время возврата, когда достигается пороговая глубина, электропитание одной или нескольких схем сейсмической сенсорной станции может отключаться. Благодаря избирательному энергоснабжению одной или нескольких схем сейсмической сенсорной станции 100 в вариантах осуществления изобретения может сберегаться электроэнергия и продлеваться срок службы сейсмической сенсорной станции во время операций по регистрации сейсмических данных.
[33] На фиг. 2, 3, 4 и 5 показаны примеры корпусов для сейсмической сенсорной станции, например сенсорной станции 100 из фиг. 1, согласно варианту осуществления изобретения. Как показано на фиг. 2, в одном варианте осуществления сейсмическая сенсорная станция 100 может включать в себя единый интегрированный корпус 200. Все электронные компоненты, такие как датчики, аккумуляторы, запоминающее устройство и другие схемы могут содержаться в корпусе 200. В одном варианте осуществления изобретения сейсмическая сенсорная станция может быть выполнена с возможностью развертывания на тросе. В соответствии с этим корпус 200 может включать в себя отверстие 210, образованное в нем для приема троса 220. Термином «трос» обозначается любой несущий элемент, выполненный с возможностью прикрепления к сейсмическим сенсорным станциям для облегчения развертывания и возврата многочисленных сейсмических сенсорных станций. Трос может изготовляться из материала любого вида, который может включать в себя синтетические материалы, природные материалы, металлические материалы или аналогичные, или любое сочетание из них. В других вариантах осуществления сенсорная станция может развертываться без троса, например, с дистанционно-управляемого аппарата или станция может просто сбрасываться в воду. В вариантах осуществления, в которых трос не используется, от выполнения отверстия 210 можно отказаться.
[34] На фиг. 3 показан вариант осуществления, в котором два или большее количество корпусов выполнены с возможностью присоединения друг к другу для образования законченной модульной сенсорной станции. Например, как показано на фиг. 3, первый модульный корпус 310 модульной станции может быть блоком (или модулем) датчиков, содержащим один или несколько сейсмических датчиков. Второй модульный корпус 320 может быть блоком памяти и/или аккумуляторным блоком (в дальнейшем называемым просто блоком памяти или модулем памяти).
[35] Модуль 310 датчиков может быть выполнен с возможностью соединения с модулем 320 памяти на тросе 330, вследствие чего образуется модульная станция, которая прикреплена к тросу 330. Хотя модульная станция показана содержащей два компонента, в других вариантах осуществления модульная станция может включать в себя любое количество из множества компонентов. Например, модуль 320 может быть образован соединением отдельного блока памяти с отдельным аккумуляторным блоком. В общем случае варианты осуществления изобретения касаются модульной станции, которая образована соединением двух или большего количества отдельных корпусов друг с другом для образования законченной станции, при этом благодаря соединению законченная станция может также становиться присоединенной к тросу развертывания.
[36] В одном варианте осуществления соединенные модули 310 и 320 могут быть асимметричными по отношению друг к другу вокруг троса 330. Например, модуль 320 памяти может быть значительно крупнее, чем модуль 310 датчиков. Более крупный корпус можно использовать для модуля 320 памяти, что позволит иметь большее пространство для включения достаточно большого аккумулятора и запоминающего устройства большой емкости. В одном варианте осуществления изобретения одному или нескольким из компонентов 310 и 320 может быть придана гидродинамическая форма для облегчения перемещения через толщу воды во время операций развертывания и/или возврата. Кроме того, в одном варианте осуществления корпусы для компонентов 310 и 320 могут включать в себя элементы, например шипы, клинья и т.д. (не показанные на фиг. 3), для содействия лучшему сцеплению с морским дном, вследствие которого повышается качество собираемых сейсмических данных.
[37] Соединение модуля 310 датчиков с модулем 320 памяти может включать в себя закрепление модуля 310 датчиков и модуля 320 памяти на тросе 330 в заданном месте. Закрепление модуля 310 датчиков и модуля 320 памяти может включать в себя сцепление одного или нескольких физических элементов на корпусах модулей 310 и 320 друг с другом и/или с тросом. Кроме того, при закреплении компонентов 310 и 320 могут также электрически соединяться друг с другом соответствующие компоненты. В другом варианте осуществления компоненты 310 и 320 прежде всего могут быть соединены друг с другом, а после этого собранный сейсмический узел, содержащий соединенные компоненты 310 и 320, может быть прикреплен к тросу, например, в отверстии, которое образовано сквозь соединенные корпусы 310 и 320.
[38] На фиг. 4 представлена блок-схема, иллюстрирующая примеры компонентов из модулей 310 и 320 согласно варианту осуществления изобретения. Как показано, модуль 310 может включать в себя сейсмические датчики 312, которые могут соответствовать датчикам 110 из фиг. 1. Кроме того, модуль 310 может включать в себя синхронизирующее устройство 313, которое может соответствовать синхронизирующему устройству 130 из фиг. 1. Модуль 320 датчиков может включать в себя источник 323 энергоснабжения и запоминающее устройство 322, которые могут соответствовать источнику 140 энергоснабжения и запоминающему устройству 120, соответственно, из фиг. 1. Модули 310 и 320 датчиков могут включать в себя дополнительные схемы и устройства, которые не показаны на фиг. 4.
[39] В одном варианте осуществления каждый из модулей 310 и 320 может включать в себя интерфейс для передачи сейсмических данных, регистрируемых с помощью одного или нескольких сейсмических датчиков, тактовых сигналов, управляющих сигналов для управления одним или несколькими устройствами, и/или электроэнергии, или обмена ими. Например, электрические интерфейсы 314 и 324 модулей 310 и 320, соответственно, из фиг. 4 могут быть выполнены с возможностью передачи сейсмических данных с датчиков 312 в запоминающее устройство 322 и электроэнергии от источника 323 энергоснабжения к датчикам 312 (и синхронизирующему устройству 313). В одном варианте осуществления при физическом соединении корпусов компонентов 310 и 320 может также устанавливаться электрическое соединение между интерфейсами 314 и 324. В одном варианте осуществления интерфейсы 314 и 324 могут включать в себя соединители для присоединения шины данных, предназначенной для передачи сейсмических данных, регистрируемых с помощью датчиков 312, к запоминающему устройству 322. Кроме того, интерфейсы 314 и 324 могут включать в себя соединители для шины электропитания, выполненной с возможностью передачи электроэнергии от накопителя 323 энергии к одному или нескольким компонентам в блоке 310 датчиков, например, к сейсмическим датчикам 312 и синхронизирующему устройству 313. В другом варианте осуществления общая шина может использоваться для передачи электроэнергии и данных между модулями.
[40] Варианты осуществления изобретения не ограничены конкретными структурами компонентов в модулях 310 и 320, показанных на фиг. 4. В других вариантах осуществления предполагается любая структура компонентов сейсмической сенсорной станции в виде двух или большего количества присоединяемых модулей.
[41] На фиг. 5 показан еще один вариант осуществления изобретения, в котором сейсмическая сенсорная станция 500 снабжена зажимными элементами 510 и 520 для присоединения сейсмической сенсорной станции 500 к тросу 520. Сейсмическая сенсорная станция 500 может иметь один интегрированный корпус, показанный на фиг. 2, или в других вариантах осуществления сейсмическая сенсорная станция 500 может быть образована соединением множества корпусов, показанных на фиг. 3.
[42] В одном варианте осуществления изобретения один или несколько компонентов сейсмической сенсорной станции могут быть объединены с тросом развертывания. Например, что касается фиг. 5, то компонент 540 может быть объединен с тросом 530. В одном варианте осуществления компонент 540 может включать в себя один или несколько сейсмических датчиков. Соединение корпуса 500 с тросом 530 может приводить к физическому, электрическому и/или индуктивному соединению, устанавливаемому между компонентом 540 и компонентами в корпусе 500.
[43] На фиг. 6 показан пример сейсмического исследования согласно варианту осуществления изобретения. Множество автономных сенсорных станций 610 может быть развернуто на морском дне 611. Хотя в настоящей заявке упоминаются ложе моря и морское дно, варианты осуществления изобретения не ограничены водной массой какого-либо вида. Точнее, варианты осуществления изобретения могут использоваться в любых морских условиях, в том числе в морях, озерах, реках и т.д. В соответствии с этим использование терминов «море», «морское дно», «ложе моря» и т.п. следует понимать широко с включением всех масс воды.
[44] Как показано на фиг. 6, две или большее количество сенсорных станций 610 могут быть развернуты на ложе или дне моря с использованием соответствующего троса или кабеля 650. В одном варианте осуществления трос 650 может быть изготовлен из синтетического материала с заданной удельной плотностью относительно плотности воды, в которую его погружают. В некоторых вариантах осуществления трос 650 может быть пассивным тросом, то есть, он может не включать в себя никаких электрических проводников. Однако в других вариантах осуществления трос может включать в себя встроенные проводники для передачи одного или нескольких тактовых сигналов, сигналов данных, управляющих сигналов и электроэнергии.
[45] В одном варианте осуществления одна или несколько сейсмических сенсорных станций 610 могут быть развернуты на морском дне 611 с помощью любых других средств, например, с помощью дистанционно-управляемого или автономного подводного аппарата (ДУА или АПА), сбрасыванием их с судна развертывания и т.д. В еще одном варианте осуществления каждая автономная сенсорная станция 610 может снабжаться двигательной установкой и программироваться для плавания через толщу воды к заданным местам на морском дне. Как можно видеть на фиг. 6, развертывание сейсмических сенсорных станций 610 без троса может быть предпочтительным на участках вблизи препятствий, таких как участок 680, связанный с установкой 690 для бурения нефтяных скважин, для предотвращения вхождения троса 650 в контакт с препятствующими компонентами и повреждения их во время развертывания и/или возврата.
[46] В одном варианте осуществления развернутые с использованием троса сейсмические сенсорные станции могут быть соединены с концентратором или сетевым буем. Например, тросовые сегменты 671 и 672 показаны соединенными с соответствующими концентраторами 691 и 692. Хотя концентраторы 691 и 692 показаны в виде плавучих сетевых буев, в других вариантах осуществления один или несколько концентраторов 691, 692 могут быть помещены на морское дно или могут плавать на заданной глубине в толще воды. В одном варианте осуществления концентраторы 691 и 692 могут включать в себя высокоточный генератор тактовых импульсов. Тактовый сигнал с высокоточного генератора тактовых импульсов может передаваться на сенсорные станции 610 по проводникам в тросе 650 для коррекции генератора тактовых импульсов или для генерации тактового сигнала на сенсорных станциях 610.
[47] В некоторых вариантах осуществления концентраторы 691 и 692 могут быть выполнены с возможностью передачи электроэнергии, данных и/или управляющих сигналов на сенсорные станции 610. В соответствии с этим концентраторы 691 и 692 могут быть снабжены устройствами выработки электроэнергии или аккумулирования электроэнергии и/или управляющей логикой для выполнения технического контроля и реализации заданных рабочих протоколов и т.п. В некоторых вариантах осуществления сигналы, передаваемые от концентраторов, могут использоваться, например, при подзарядке аккумуляторов станций, при выполнении проверки характеристик/работы станций, для включения/выключения станций и т.д. В некоторых вариантах осуществления устройства-концентраторы могут быть снабжены устройством глобальной спутниковой системы определения местоположения (GPS) и/или радиопередающим/радиоприемным устройством для содействия определению местоположения концентратора и/или содействия связи с устройством-концентратором.
[48] В вариантах осуществления, в которых трос 650 выполнен с возможностью передачи сигналов, хвостовое оконечное устройство 615 может быть расположено на конце троса 650. Кроме того, отдельное головное оконечное устройство может быть расположено в устройстве-концентраторе, при этом морская вода может использоваться для связи головного и хвостового оконечных устройств. В некоторых вариантах осуществления устройства-концентраторы могут не использоваться. Например, тросовый сегмент 673 показан без соответствующего устройства-концентратора.
[49] В одном варианте осуществления изобретения высокоточный генератор тактовых импульсов может быть включен в каждую сейсмическую сенсорную станцию 610. В других вариантах осуществления высокоточный тактовый сигнал может формироваться внешним главным генератором тактовых импульсов для подстройки синхронизирующих устройств, которые реализованы в сейсмических сенсорных станциях. Главный генератор тактовых импульсов может быть расположен в устройстве-концентраторе или в устройствах 618, которые могут находиться на заданных интервалах вдоль троса 650. В одном варианте осуществления устройства 618 могут включать в себя только высокоточный генератор тактовых импульсов. В других вариантах осуществления устройства 618 могут включать в себя другие компоненты, такие как источники электропитания. В еще одном варианте осуществления устройства 618 могут быть «суперстанцией», то есть, устройством со всеми компонентами сейсмической сенсорной станции 610, а также с высокоточным генератором тактовых импульсов, который может использоваться для формирования тактовых сигналов для других, расположенных поблизости сейсмических сенсорных станций 610.
[50] Снова обратимся к фиг. 6, на которой судно 620 с источником может быть выполнено с возможностью буксировки сейсмического источника 621 при проведении сейсмического исследования. В одном варианте осуществления сейсмический источник 621 может быть воздушной пушкой (или множеством воздушных пушек), выполненной с возможностью выпуска сильной струи сжатого воздуха в толщу воды ко дну 611. моря. Как показано на фиг. 6, сильная струя сжатого воздуха создает сейсмические волны 622, которые могут распространяться вниз к морскому дну 611 и проникать в геологические среды под морским дном и/или отражаться от них. Отражения от геологических сред могут регистрироваться на сенсорных станциях 610 в виде сейсмических данных, которые затем могут обрабатываться для формирования изображения подземных слоев. Эти изображения могут анализироваться геологами для идентификации областей, с большой вероятностью включающих в себя углеводороды или другие, представляющие интерес вещества.
[51] В одном варианте осуществления изобретения множество судов 620 с источниками могут одновременно работать при регистрации сейсмических данных. В вариантах осуществления, в которых используются многочисленные суда с источниками, суда с источниками могут быть выполнены с возможностью работы их соответствующих источников в режиме одновременной работы источников. Например, источники на двух или большем количестве судов с источниками могут быть выполнены с возможностью излучения сейсмической энергии по существу одновременно или с заданной задержкой, такой, чтобы имелось по меньшей мере некоторое перекрытие во время излучения сейсмической энергии от двух или большего количества источников.
[52] В одном варианте осуществления изобретения трос 650 развертывания может включать в себя единственный проводник, выполненный с возможностью передачи тактового сигнала. Как описывалось выше, тактовый сигнал может передаваться с устройства-концентратора или с устройства 618. На фиг. 7 показан пример кабеля 650 в поперечном разрезе согласно варианту осуществления изобретения. Как показано, трос 650 может включать в себя электропроводящий провод 651, который окружен изоляционным слоем 652. Изоляционный слой 652 может быть окружен упрочняющим элементом 653, например волокном или другим синтетическим материалом.
[53] В одном варианте осуществления изобретения устройства могут быть индуктивно связаны с проводником в тросе, таком как трос, показанный на фиг. 7. На фиг. 8 показана система для передачи сигналов по электропроводящему тросу 650. Главное командное и управляющее устройство 810 может быть выполнено с возможностью управления трансформатором 811 тока для индуктивной генерации токового сигнала в электропроводящем тросе 650. В одном варианте осуществления главное командное и управляющее устройство 810 может быть расположено в устройстве-концентраторе или в устройстве 618 (см. фиг. 8) и может быть выполнено с возможностью создания тактового сигнала в электропроводящем тросе 650.
[54] Токовый сигнал в электропроводящем тросе 650 может обнаруживаться трансформаторами 821 тока, которые могут индуцировать сигнал для преобразователей 820 тока станции, вследствие чего сигнал передается от электропроводящего троса на сенсорную станцию. Импедансы 830 могут быть включены на концах электропроводящего троса 650 для согласования нагрузок и подавления отражений сигналов, при которых может создаваться шум. Как описывалось ранее, морская вода может быть средством для связи головного и хвостового концов электропроводящих тросов.
[55] На фиг. 9 показан пример кормовой палубы судна развертывания сенсорной станции согласно варианту осуществления изобретения. Судно может быть выполнено с возможностью развертывания и/или возврата морской донной сенсорной системы на тросе. Как показано, кормовая палуба может включать в себя конструкцию 910 для хранения станций, конструкцию 920 для хранения кабелей и перевалочный участок 930. В одном варианте осуществления конструкция 910 для хранения станций может быть грузовым контейнером любого размера, выполненным с возможностью хранения одного или нескольких компонентов сейсмической сенсорной станции. Конструкция для хранения станций может включать в себя устройства для подачи электроэнергии для подзарядки аккумуляторов и загрузки сейсмических данных из запоминающего устройства и т.п. В одном варианте осуществления конструкция для хранения станций может включать в себя отдельные участки для одного или нескольких компонентов станции, например, первый участок для хранения модулей сенсорной станции и второй участок для хранения модулей сенсорной станции. В одном варианте осуществления конструкция для хранения станций может включать в себя устройства для размещения одной или нескольких тележек, при этом каждая содержит множество модулей станции. Тележки могут включать в себя интерфейс для подзарядки аккумуляторов, загрузки данных, выполнения технического контроля и т.п. Тележки для модулей станции описываются более подробно ниже.
[56] Конструкция 920 для хранения кабелей может быть грузовым контейнером, кабельным коробом, кабельным барабаном или чем-либо подобным, выполненным с возможностью хранения одного или нескольких кабелей, которые могут использоваться для развертывания сейсмических сенсорных станций. Перевалочный участок 930 может использоваться для соединения одного или нескольких компонентов модульной сенсорной станции друг с другом и/или с тросом до развертывания. Кроме того, перевалочный участок можно использовать для отсоединения сенсорной станции от троса и/или для разъединения компонентов модульной сенсорной станции во время возврата сенсорных станций после исследования. В одном варианте осуществления перевалочный участок 930 может включать в себя компоненты, например механическое оборудование, приспособления и т.п., для содействия развертыванию и возврату сейсмических сенсорных станций, например, снижающие натяжение троса устройства, аппарели или кабельные каналы для направления кабеля и т.п.
[57] Как упоминалось ранее, конструкция 910 для хранения станций может быть выполнена с возможностью размещения множества тележек, при этом каждая тележка может содержать множество компонентов сенсорной станции. На фиг. 10 показан пример тележки 1050 согласно варианту осуществления изобретения. Тележка 1050 может включать в себя множество гнезд 1051 для размещения компонентов сенсорных станций. В одном варианте осуществления каждая тележка может включать в себя множество расположенных друг над другом гнездовых лотков 1054. Каждая тележка может включать в себя только сенсорные модули, только модули памяти/аккумуляторов или сочетание сенсорных модулей и модулей памяти/аккумуляторов. Каждое гнездо может быть электрически соединено с интерфейсом 1052. Интерфейс 1052 может использоваться для загрузки сейсмических данных с сенсорных модулей, зарядки аккумуляторов в модулях аккумуляторов, выполнения проверок характеристик компонентов, таких как датчики, запоминающее устройство, аккумулятор и т.п.
[58] На фиг. 11 показан перевалочный участок на кормовой палубе сейсмического судна согласно варианту осуществления изобретения. Как показано, кабельный барабан 1170 может использоваться для развертывания кабеля в воду. В варианте осуществления, показанном на фиг. 11, первый модуль 1171 модульной сейсмической сенсорной станции может быть постоянно прикреплен к тросу. Трос может выпускаться на перевалочный участок с кабельного барабана 1170, при этом до развертывания второй модуль 1172 может быть соединен с первым модулем 1171. В одном варианте осуществления первый модуль 1171 может быть сенсорным модулем и второй модуль 1172 может быть модулем памяти.
[59] Второй модуль 1172 может быть извлечен из конструкции для хранения (например, конструкции 910 на фиг. 9) на тележке 1050 (см. также фиг. 10). Хотя на фиг. 11 первый модуль 1171 показан постоянно присоединенным, в других вариантах осуществления трос может не содержать никаких постоянно присоединенных компонентов. В таких вариантах осуществления компоненты сенсорных станций можно извлекать с участка хранения на тележках 1050. До развертывания компоненты станций могут быть соединены друг с другом и с тросом на перевалочном участке. В другом варианте осуществления компоненты станций могут быть соединены друг с другом на ином месте, например, в конструкции для хранения и доставлены на перевалочный участок на одной или нескольких тележках. Пути или маршруты тележек могут устанавливаться из условия безопасного перемещения тележек к перевалочному участку. После этого полностью собранные станции до развертывания могут быть присоединены к тросу на перевалочном участке.
[60] Во время возврата кабели, содержащие сейсмические сенсорные станции, могут быть размещены на перевалочном участке. На перевалочном участке сенсорные станции могут быть отсоединены от троса, индивидуальные модули сенсорной станции могут быть отсоединены и загружены на тележки и перемещены на соответствующие места хранения. Возвращаемый кабель может перемещаться на участок/конструкцию для хранения кабелей по мере того, как он возвращается.
[61] На фиг. 12 показан пример автоматизированной системы 1200 развертывания морских донных сейсмических сенсорных станций согласно варианту осуществления изобретения. Как показано, система 1200 может включать в себя устройство 1210 для хранения кабеля, множество морских донных сенсорных станций 920А-С и трос 1230. В одном варианте осуществления устройство 1210 для хранения кабеля может быть лебедкой. В ином случае, устройство 1210 для хранения кабеля может быть кабельным коробом или любой другой конструкцией, выполненной с возможностью хранения кабеля. Кабель 1230 может быть изготовлен из синтетического материала с заданной плавучестью в воде. В некоторых вариантах осуществления кабель 1230 может быть электропроводящим кабелем, описанным в этой заявке выше.
[62] В контейнере 1240 может храниться множество морских донных сейсмических сенсорных станций 1220. В одном варианте осуществления контейнером 1240 может быть труба, изготовленная из любого сочетания одного или нескольких материалов из пластика, металла и т.д. Контейнер 1240 может иметь первый конец 1243, который может включать в себя прорезь для приема троса 1230 с устройства 1210 для хранения кабеля. Кроме того, контейнер 1240 может включать в себя второй конец 1244, начиная с которого сейсмические сенсорные станции могут разворачиваться и/или возвращаться.
[63] Как показано на фиг. 12, множество сейсмических сенсорных станций 1220 может быть наложено на трос 1230. Например, в одном варианте осуществления сейсмические сенсорные станции 1220 могут включать в себя отверстие 1221, благодаря которому сенсорные станции 1220 могут быть нанизаны на трос 1230. В других вариантах осуществления сенсорные станции 1220 могут включать в себя соединитель, например петлевой соединитель, для приема троса 1230.
[64] В одном варианте осуществления контейнер 1240 может включать в себя средство связи с сенсорными станциями 1220 для загрузки данных, зарядки аккумуляторов и т.п. Например, в одном варианте осуществления индуктивное устройство 1241 может быть расположено вблизи сейсмической сенсорной станции 1220 (станции 1220А на фиг. 12). В другом варианте осуществления соединитель 1242 может находиться в непосредственном электрическом соединении с сенсорной станцией (станцией 1220В на фиг. 12). В других вариантах осуществления множество соединителей 1242 может образовывать шину передачи, выполненную с возможностью соединения с каждой станцией в контейнере и обеспечения доступа станций к зарядке аккумуляторов, загрузке данных и т.п. В еще одном варианте осуществления сенсорная станция может быть выполнена с возможностью поддержания беспроводной связи с бортовым компьютером для передачи собираемых сейсмических данных.
[65] Развертывание сейсмической сенсорной системы 1200 может начинаться инициирования развертывания троса 1230 в воду. В одном варианте осуществления трос 1230 может быть выполнен с возможностью перемещения во время развертывания через отверстие 1221 по существу без перемещения сенсорных станций 1220 с их мест в контейнере 1240. Одна из сейсмических сенсорных станций 1220 может быть выполнена с возможностью захвата троса и выпуска из контейнера 1240 через заданный промежуток времени или после развертывания троса на заданную длину. Например, на фиг. 12 первой может быть развернута сейсмическая сенсорная станция 1220С, за ней следует станция 1220В и затем станция 1220А.
[66] В одном варианте осуществления изобретения развертывание сейсмических сенсорных станций вдоль троса 1230 может быть основан на заданном разнесении между сенсорными станциями при развертывании. Например, контроллер лебедки может быть выполнен с возможностью определения числа оборотов лебедки, которые происходят во время развертывания. Числом оборотов лебедки может определяться длина развернутого троса. На основании длины троса, который был развернут, или длины троса, который был развернут после развертывания последней сейсмической сенсорной станции, на следующую сейсмическую сенсорную станцию может быть послан сигнал для захвата троса. Например, контроллер лебедки может определять число оборотов лебедки после развертывания станции 1220С. Когда число оборотов лебедки достигает заданного числа, связанного с заданной длиной троса, развернутого после развертывания станции 1220С, на станцию 1220В может быть послан сигнал для захвата троса. Сигналы на сейсмические станции для захвата троса могут посылаться индуктивным способом через индуктивное устройство 1241, через соединитель 1242 или по беспроводной линии.
[67] Лебедка 1210 может быть выполнена с возможностью наматывания троса 1230 через контейнер 1240 во время возврата сейсмической сенсорной системы 1200. Сейсмические сенсорные станции выполнены с возможностью освобождения троса 1230, когда они возвращаются в контейнер 1240, в результате чего они останавливаются на заданном месте в контейнере. В одном варианте осуществления станции 1220 могут быть выполнены с возможностью освобождения троса при обнаружении индуктивной или электрической связи, например, через посредство индуктивного элемента 1241 или электрического соединителя 1242. В другом варианте осуществления станции 1220 могут включать в себя датчики для определения соседства с или контакта с другой станцией 1220. Поэтому, когда сейсмическая сенсорная станция подходит на заданное расстояние к другой сейсмической сенсорной станции или когда обнаруживается контакт сейсмической сенсорной станции с другой сейсмической сенсорной станцией, трос 1230 может быть освобожден.
[68] Хотя показана сейсмическая сенсорная система 1200, содержащая одну лебедку 1210, один трос 1230 и три сейсмические сенсорные станции, в других вариантах осуществления сейсмическая сенсорная система может включать в себя любое количество лебедок, выполненных с возможностью развертывания любого количества тросов из любого количества контейнеров 1240, которые могут включать в себя любое количество сейсмических сенсорных станций.
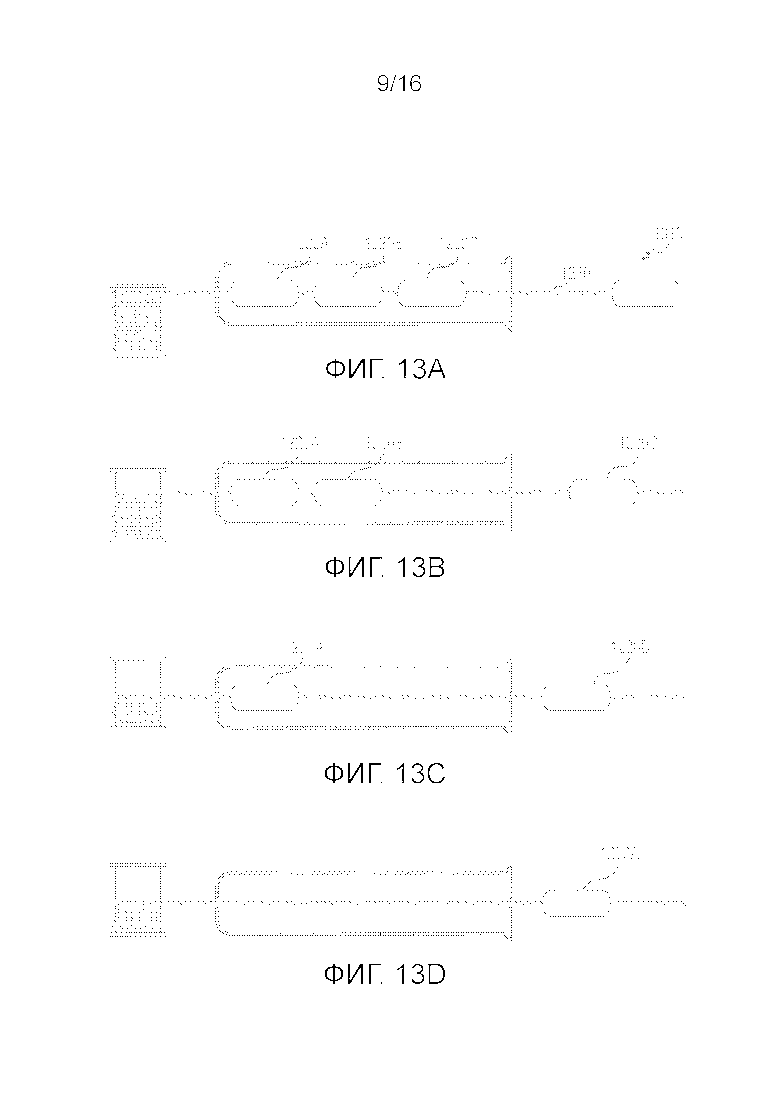
[69] На фиг. 13A-D показан пример развертывания морской донной сейсмической сенсорной системы согласно варианту осуществления изобретения. Как показано, развертывание может начинаться с развертывания троса 1230 в воду. Трос 1230 может включать в себя якорь 1310. На фиг. 13В показано развертывание первой сенсорной станции 1220С. Развертывание может инициировать контроллер развертывания (непоказанный), который может побуждать станцию 122°C к захвату троса 1230.
[70] После развертывания первой станции 122°C контроллер развертывания может определить длину развернутого троса после развертывания станции 1220С. Как показано на фиг. 13С, когда заданная длина выпущенного троса достигается, контроллер развертывания может послать сигнал на станцию 1220В для захвата троса и развертывания. Как показано на фиг. 13D, после развертывания станции 1220В контроллер развертывания может аналогичным образом развернуть станцию 1220А после развертывания троса на заданную длину.
[71] В одном варианте осуществления изобретения контроллер развертывания может быть выполнен с возможностью расположения станций 1220 на равных расстояниях друг от друга вдоль троса во время развертывания. Однако в других вариантах осуществления контроллер развертывания может постепенно уменьшать или же изменять расстояния между станциями на тросе. Что касается, например, фиг. 13В, то контроллер развертывания может побуждать станции 122°C и 1220В к захвату троса так, чтобы расстояние между ними составляло 25 м. После этого контроллер развертывания может послать сигнал на станцию 1220А для захвата троса так, чтобы расстояние между станциями 1220А и 1220В составляло 50 м.
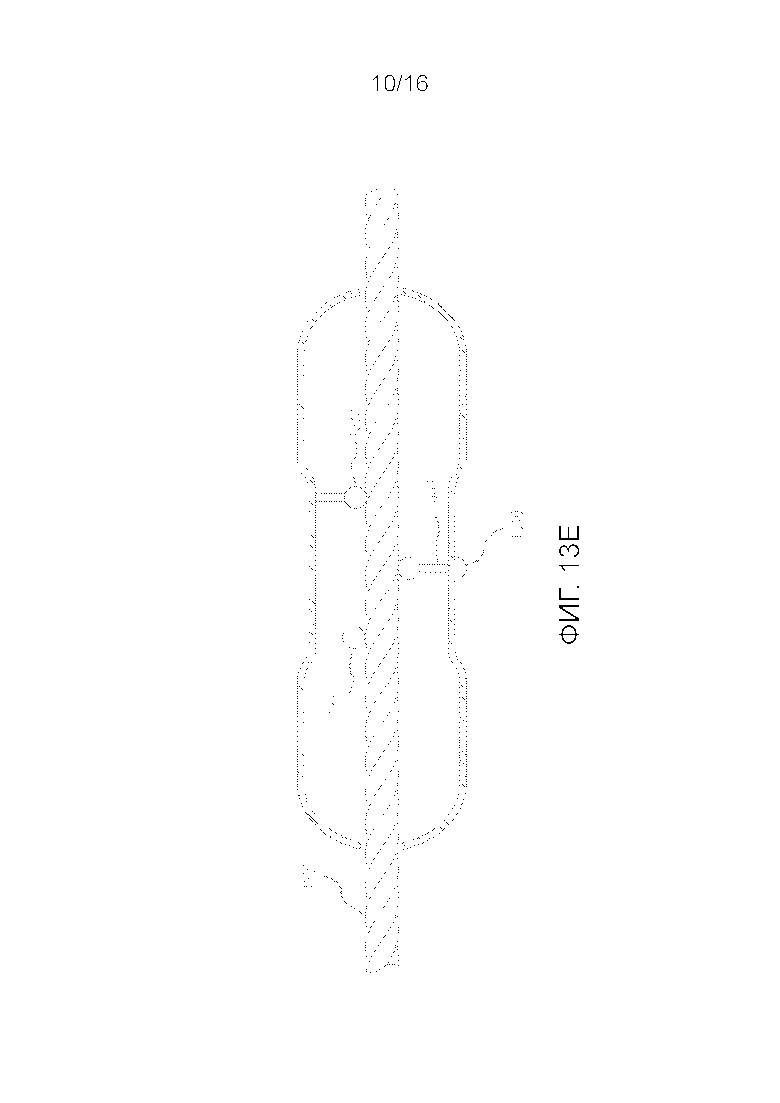
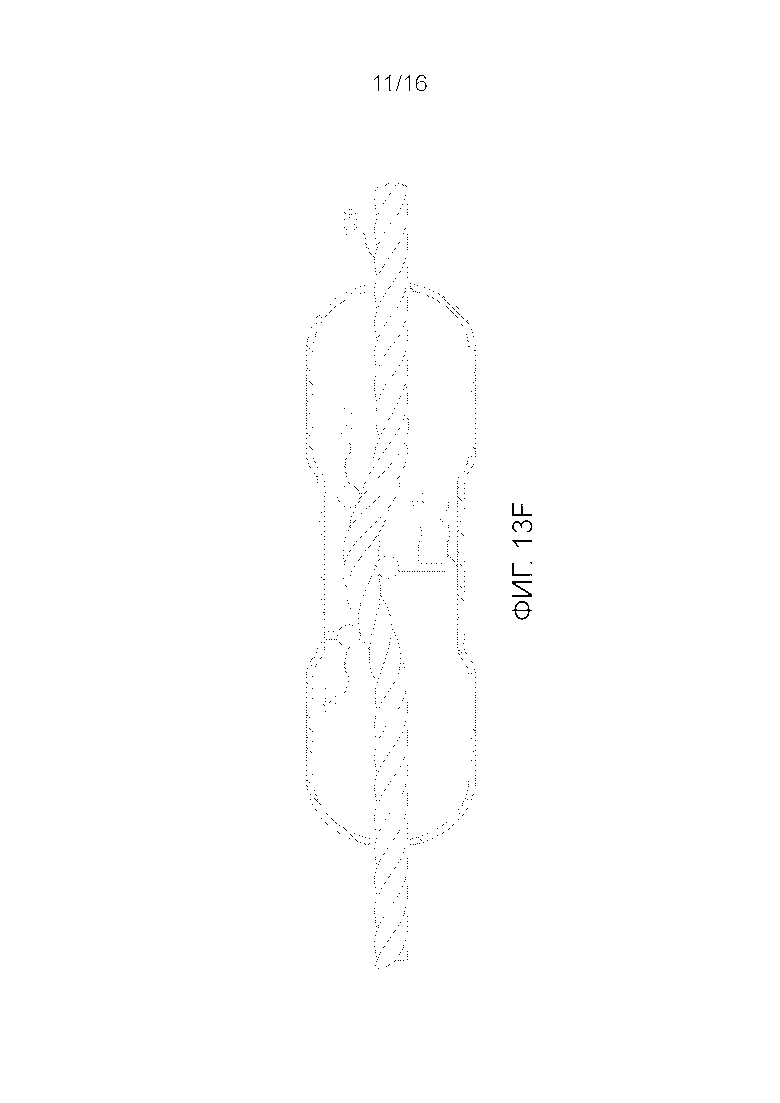
[72] На фиг. 13Е и 13F показан способ присоединения сенсорной станции к тросу согласно варианту осуществления изобретения. Кроме того, показан пример соединительного механизма, содержащего элементы 1331, 1332 и 1333. В варианте осуществления из фиг. 13Е элементы 1331, 1332 и 1333 расположены так, что трос не захватывается станцией и поэтому свободно развертывается через станцию. На фиг. 13F показана вторая конфигурация соединительного механизма, в котором элементы 1331, 1332 и 1333 расположены так, что трос 1320 захватывается, в результате чего станция присоединяется к тросу.
[73] В одном варианте осуществления изобретения может быть предусмотрен соединитель 1340. Как показано на фиг. 13Е, когда станция не присоединена к тросу, соединитель 1340 выступает из станции, и он может создавать электрический контакт с элементами, как например, соединитель 1242 из фиг. 12, что облегчает доступ к станции для загрузки данных, зарядки аккумуляторов и т.п. В конфигурации из фиг. 13F соединитель отведен в станцию, когда станция присоединена к тросу и развертывается.
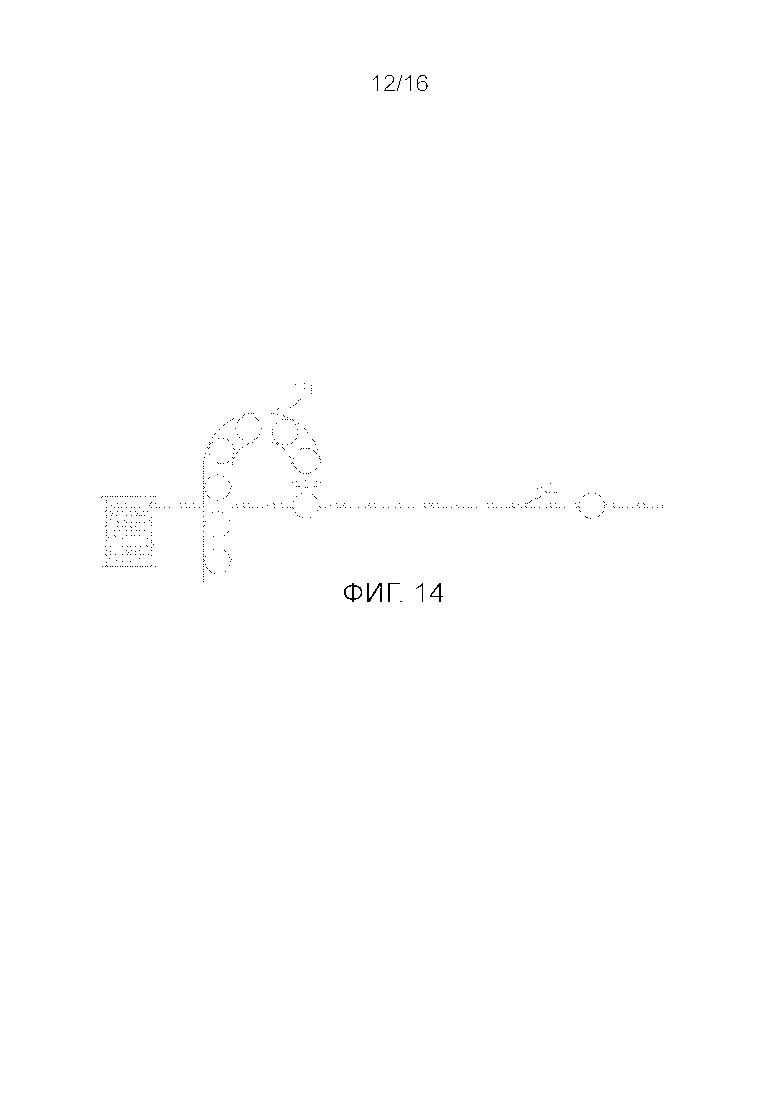
[74] На фиг. 14 показана еще одна система 1400 развертывания сейсмических сенсорных станций согласно варианту осуществления изобретения. Система 1400 может быть автоматизированной системой, в которой магазин 1410 станций может быть выполнен с возможностью хранения множества сенсорных станций. Магазин 1410 станций может быть выполнен с возможностью выталкивания сейсмических сенсорных станций, содержащихся в нем, заданным или управляемым способом к тросу 1420 развертывания. Сейсмические сенсорные станции 1410 могут захватывать трос при контакте и развертываться вместе с тросом. Захват может осуществляться, например, при использовании зажимных элементов, показанных на фиг. 5.
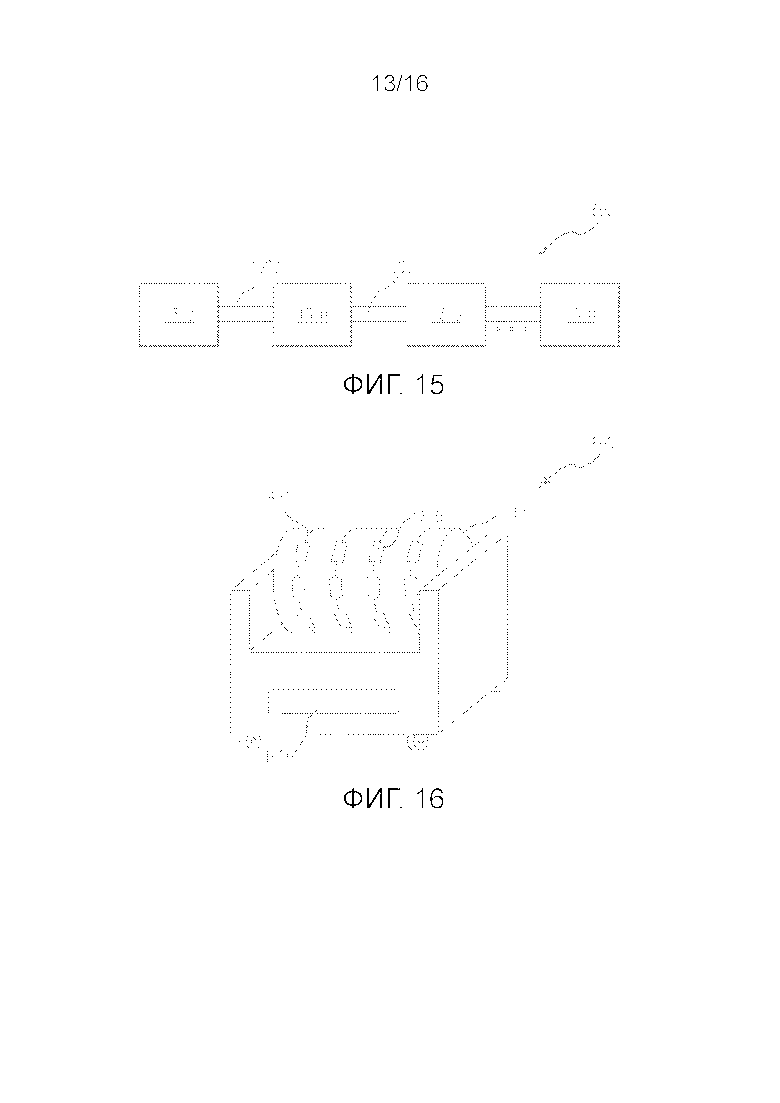
[75] На фиг. 15 показан еще один вариант осуществления системы морских донных сейсмических сенсорных станций согласно варианту осуществления изобретения. Как показано на фиг. 15, система сейсмических сенсорных станций может включать в себя сенсорный сегмент 1500, содержащий множество сейсмических сенсорных станций 1510, которые присоединены к тросу 1520. Сейсмические сенсорные станции 1510 могут соответствовать сейсмическим сенсорным станциям, показанным на фиг. 1-5, и могут включать в себя аналогичные компоненты. В одном варианте осуществления сейсмические сенсорные станции 1510 могут быть модульными сейсмическими сенсорными станциями, содержащими физически различные модули, которые соединены друг с другом. В других вариантах осуществления сейсмические сенсорные станции 1510 могут быть образованы включением в любом сочетании сейсмических датчиков, запоминающего устройства, источника энергоснабжения и/или генератора тактовых импульсов в одном корпусе.
[76] В одном варианте осуществления изобретения сейсмические сенсорные станции 1510 могут быть электрически соединены друг с другом через посредство линии 1530, которая может быть встроена в трос 1520. По линии 1530 могут передаваться электроэнергия, данные, команды и т.п. на сенсорные станции 1510 сенсорного сегмента 1500 и/или от них. В одном варианте осуществления линия 1530 может включать множество линий передачи. Например, первое множество линий передачи может быть выполнено с возможностью передачи данных на сенсорные станции 1510 и от них, второе множество линий данных может быть выполнено с возможностью передачи команд на сенсорные станции 1510 и от них, а по третьей группе из одной или нескольких линий передачи может передаваться электроэнергия на сенсорные станции 1510 и от них. В других вариантах осуществления один и тот же набор линий передачи или одни и те же линии могут использоваться для передачи одного или нескольких наборов сейсмических данных, команд и/или электроэнергии. Кроме того, хотя в данном случае показана одна линия 1530, в других вариантах осуществления множество линий может быть включено для передачи сейсмических данных, команд и электроэнергии на соответствующие сенсорные станции 1510 сегмента 1500 и от них.
[77] В одном варианте осуществления во время сейсмического исследования, когда сенсорный сегмент 1500 развернут, линия 1530 может не использоваться. При проведении исследования на каждой сейсмической сенсорной станции 1510 могут собираться свои соответствующие сейсмические данные и сохраняться сейсмические данные в локальном запоминающем устройстве. После завершения исследования сенсорный сегмент 1500 может быть выбран с места исследования. После возвращения линия 1530 может использоваться для вывода по линии сейсмических данных от сейсмических сенсорных станций 1510. В одном варианте осуществления линия 1530 может использоваться для передачи синхронизирующего сигнала с устройства-концентратора или с устройства-«суперстанции» на другие станции во время исследования, а после завершения исследования линия может использоваться для доступа к узлу для загрузки данных, зарядки, технического контроля и т.д.
[78] В одном варианте осуществления изобретения один или несколько тросовых сегментов могут помещаться на тележке с барабаном при транспортировке на кормовую палубу сейсмического судна. На фиг. 16 показан пример тележки 1600 согласно варианту осуществления изобретения. Как показано, тележка 1600 может включать в себя барабан 1610 и интерфейс 1620. Сенсорные станции 1510, намотанные на барабан 1610, могут быть электрически соединены с интерфейсом 1620 по линии (например, линии 1530 на фиг. 15). В таком случае интерфейс 1620 может использоваться через посредство линии для зарядки аккумуляторов, загрузки сейсмических данных, проверки характеристик и т.п. на сенсорных станциях 1510.
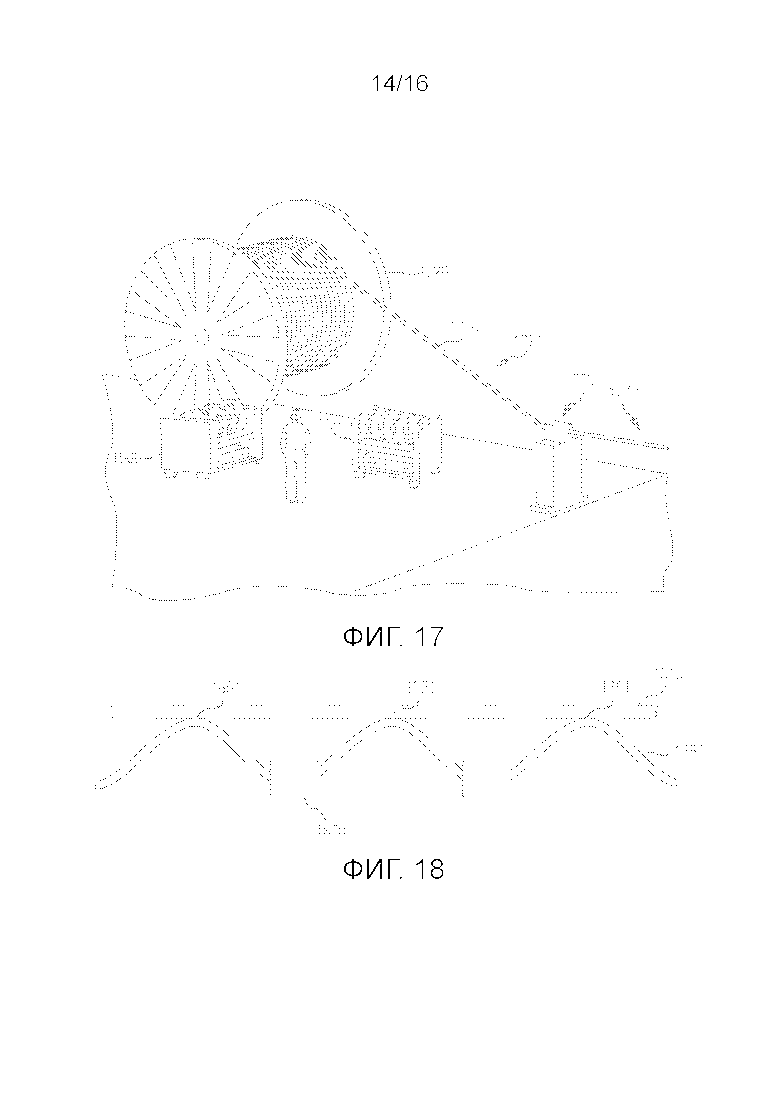
[79] Множество тележек с барабанами, каждая из которых содержит один или несколько сенсорных сегментов, могут храниться на участке хранения сенсорных станций (см. позицию 910 на фиг. 9) кормовой палубы сейсмического судна. Во время развертывания и/или возврата тележки с барабанами могут транспортироваться на участок хранения сенсорных станций и/или с него на рабочий участок по пути тележек, маршрутам тележек или чему-либо подобному. На фиг. 17 показано развертывание/возврат сенсорного тросового сегмента согласно варианту осуществления изобретения. Как показано, тележки 1600 с барабанами могут быть доставлены на рабочий участок кормовой палубы сейсмического судна. Кроме того, показан несущий элемент/кабель 1710, который выпускается с кабельного барабана 1720 на рабочий участок. В одном варианте осуществления сенсорный кабельный сегмент может быть размотан с тележки 1600 и соединен с несущим кабелем 1710 на одном или нескольких местах перед развертыванием.
[80] На фиг. 18 показан пример способа соединения сенсорного кабельного сегмента 1850, содержащего множество сейсмических сенсорных станций 1870, с несущим кабелем. Как показано, кабельный сегмент 1850 может быть соединен с несущим кабелем 1810 в местах 1851 соединений способом, который обеспечивает некоторое провисание кабельного сегмента 1850 относительно несущего кабеля 1810. Одна или несколько сейсмических сенсорных станции 1870 могут иметься на сенсорном кабельном сегменте 1850 между двумя местами 1851 соединений.
[81] Во время возврата несущий кабель 1810 может быть смотан на рабочем участке сейсмического судна и перемотан на барабан 1720. На рабочем участке сейсмические кабельные сегменты могут быть отделены от несущего кабеля 1810 и погружены на тележки 1600 для хранения.
[82] Кроме того, на фигуре 17 показано снижающее натяжение/направляющее по каналу устройство 1770. Устройство 1770 может быть сдавливающим блоком и/или трубой, выполненной с возможностью направления кабеля в воду и поддержания на различных уровнях натяжения на первой стороне 1771 устройства 1770 и второй стороне 1772. В одном варианте осуществления натяжение на первой стороне 1771 может быть значительно меньше, чем натяжение на второй стороне 1772.
[83] В другом варианте осуществления изобретения несущий кабель 1710 может быть исключен и сейсмические сенсорные кабельные сегменты могут непосредственно развертываться в воду. В таких вариантах осуществления множество тележек 1600 с барабанами могут доставляться на рабочий участок, а два или большее количество сенсорных кабельных сегментов могут быть соединены друг с другом перед развертыванием.
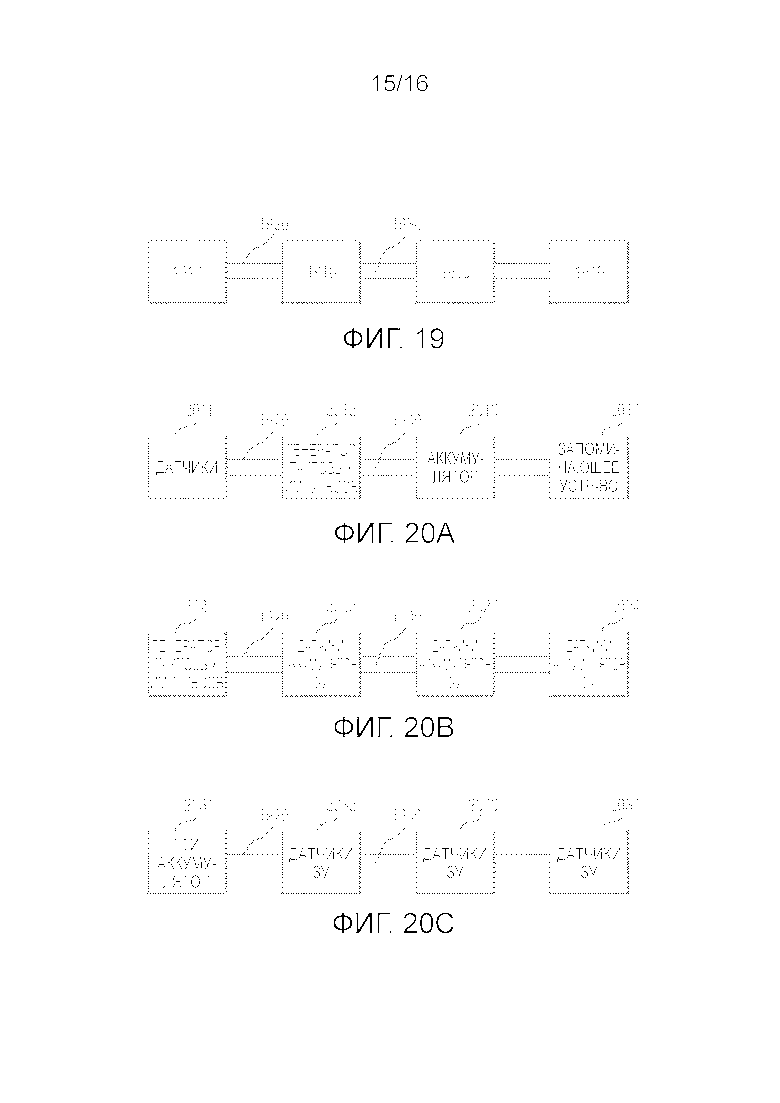
[84] На фиг. 19 показана морская донная сейсмическая сенсорная система 1900 согласно еще одному варианту осуществления изобретения. Как показано, сенсорная система 1900 может включать в себя множество электрически соединенных установочных мест 1910, которые соединены с тросом 1920. Установочные места 1910 могут электрически соединены друг с другом посредством звеньевой системы 1930, которая может быть встроена в трос 1920. По линии 1930 может передаваться любое одно или несколько из электроэнергии, данных, команд и т.п. на установочные места 1910 сенсорной системы 1900 и с них.
[85] В одном варианте осуществления линия 1930 может включать в себя множество линий передачи. Например, первое множество линий передачи может быть выполнено с возможностью передачи данных на одно или несколько установочных мест 1910 и с них, второе множество линий данных может быть выполнено с возможностью передачи команд на одно или несколько установочных мест 1910 и с них, а по третьей группе из одной или нескольких линий передачи может передаваться электроэнергия на одно или несколько установочных мест 1910 и с них. В других вариантах осуществления одна и та же линия передачи или набор линий передачи может использоваться для передачи одного или нескольких из сейсмических данных, команд и/или электроэнергии. Кроме того, хотя в данном случае показана одна линия 1930, в других вариантах осуществления множество линий может быть включено для передачи одного или нескольких из сейсмических данных, команд и электроэнергии на одно или несколько установочных мест 1910 системы 1900 и с них.
[86] В одном варианте осуществления система 1900 может быть распределенной системой, в которой каждый установочное место 1910 может быть выполнено с возможностью размещения любого одного или нескольких сейсмических датчиков, генератора тактовых импульсов, запоминающего устройства и/или аккумулятора. На фиг. 20А-С показано примерное размещение компонентов на установочных местах 1910 распределенной сенсорной системы согласно варианту осуществления изобретения. На фигуре 20А сейсмические датчики могут быть размещены на установочном месте 2011, тактовый генератор импульсов может быть размещен на установочном месте 2012, аккумулятор может быть размещен на установочном месте 2013 и запоминающее устройство может быть размещено на установочном месте 2014. Сейсмические данные, регистрируемые с помощью датчиков на установочном месте 2011, могут передаваться к запоминающему устройству 2014 по линии 1930. Тактовый сигнал с генератора тактовых импульсов на установочном месте 2012 может распределяться по линии 1930 к запоминающему устройству, датчикам и аккумулятору. Кроме того, электроэнергия от аккумулятора на установочном месте 2013 может распределяться по линии к генератору тактовых импульсов, датчикам и запоминающему устройству.
[87] На фиг. 20В показан вариант осуществления, в котором генератор тактовых импульсов размещен на установочном месте 2021, а датчики, аккумуляторы и запоминающие устройства (ЗУ) размещены на каждом из установочных мест 2022, 2023 и 2024. Тактовый сигнал может распределяться по линии 1930 от тактового генератора на установочном месте 2021 к датчикам, запоминающим устройствам (ЗУ) и аккумуляторам на установочных местах 2022, 2023 и 2024. На фиг. 2°C показан еще один вариант осуществления, в котором генератор тактовых импульсов (ГТИ) и аккумулятор размещены на установочном месте 2031, а датчики и запоминающее устройство (ЗУ) размещены на каждом из установочных мест 2032, 2033 и 2034. Поэтому линия 1930 может использоваться для передачи тактового сигнала и электроэнергии с установочного места 2031 к установочным местам 2032, 2033 и 2034.
[88] Кроме того, линия 1930 фиг. 19 и 20А-С может использоваться для вывода сейсмических данных из запоминающих устройств к устройствам зарядки аккумуляторов. Например, в одном варианте осуществления сенсорная система, показанная на фиг. 19 и 20А-С, может быть намотана на барабан тележки, такой как тележка 1600 с барабаном, показанная на фиг. 16. Линия 1930 может быть выполнена с возможностью электрического соединения с интерфейсом 1620, в связи с чем будет обеспечиваться доступ к устройствам в сейсмической сенсорной системе для зарядки аккумуляторов, загрузки данных и решения других задач, связанных с техническим контролем.
[89] Хотя на фиг. 19 и 20А-С показана сейсмическая сенсорная система с четырьмя установочными местами, в других вариантах осуществления сейсмическая сенсорная система может включать в себя любое количество установочных мест. Кроме того, варианты осуществления изобретения не ограничены конкретным размещением устройств, показанным на фиг. 20А-С. В общем случае варианты осуществления изобретения предполагаются включающими в себя любое устройство из одного или нескольких датчиков, генераторов тактовых импульсов, устройств аккумулирования энергии и запоминающих устройств на каждом установочном месте в сейсмической сенсорной системе, при этом звеньевая система используется для передачи электроэнергии, тактового сигнала и/или сейсмических данных между двумя или большим количеством установочных мест.
[90] Развертывание и возврат сейсмической сенсорной системы, показанной на фиг. 19 и 20А-С, могут выполняться способом, подобным способу, показанному и описанному с обращением к фиг. 17 и 18. В качестве варианта две или большее количество сейсмических сенсорных систем могут быть соединены друг с другом и непосредственно развернуты в воду без несущего кабеля.
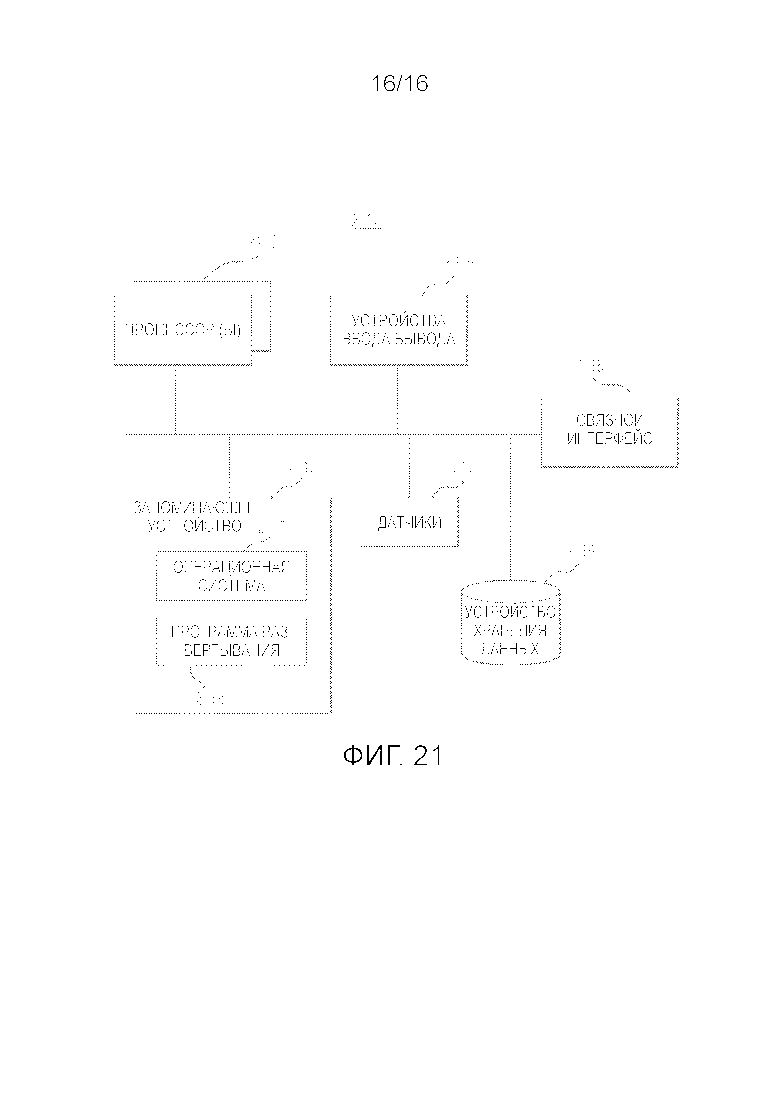
[91] На фиг. 21 представлена для примера функциональная схема системы 2100 управления развертыванием согласно варианту осуществления изобретения. В одном варианте осуществления система 2100 управления может быть расположена на сейсмическом судне. Как описано в этой заявке ниже, система управления может быть выполнена с возможностью определения развертывания сейсмических сенсорных станций из контейнера. Как показано на фиг. 21, система 2100 управления может включать в себя один или несколько процессоров 2111, запоминающее устройство 2112, устройства 2114 ввода/вывода, устройство 2115 хранения данных и связной интерфейс 2116.
[92] Устройства 2114 ввода/вывода могут включать в себя устройства ввода, такие как мышь, клавиатура, сенсорные экраны и т.п., и устройства вывода, такие как мониторы на электроннолучевой трубке, жидкокристаллические дисплеи, планшетные компьютеры и т.п. В устройстве 2115 хранения данных могут сохраняться прикладные программы и данные, предназначенные для использования системой 2100 управления. Типичные устройства хранения данных включают в себя жесткие диски, карты флэш-памяти, оптические носители, сеть и виртуальные устройства хранения данных и т.п. Связной интерфейс 2116 может соединять систему 2100 управления с сетью передачи данных любого вида, в том числе с проводными сетями, беспроводными сетями или сочетанием из них. В одном варианте осуществления связной интерфейс может использоваться для передачи данных, команд и т.п. на одну или несколько сейсмических сенсорных станций в контейнере.
[93] Датчики 2120 могут быть выполнены с возможностью определения длины кабеля, который развернут. В одном варианте осуществления датчики 2120 могут включать в себя датчики лебедки, выполненные с возможностью определения числа оборотов лебедки, которые осуществляются во время развертывания. Числом оборотов лебедки в любой конкретный момент времени может определяться длина кабеля, который развернут.
[94] Предпочтительно, чтобы запоминающее устройство 2112 представляло собой оперативное запоминающее устройство достаточно большой емкости для сохранения необходимых средств программирования и структур данных изобретения. Хотя запоминающее устройство 2112 показано как одно целое, следует понимать, что запоминающее устройство 2112 фактически может содержать множество модулей и что запоминающее устройство 2112 может существовать на многочисленных уровнях, начиная с быстродействующих регистров и сверхоперативной памяти и кончая кристаллами медленнодействующего динамического оперативного запоминающего устройства с большей емкостью.
[95] Для иллюстрации, запоминающее устройство 2112 содержит операционную систему 2117. Хорошо известные примеры операционных систем включают в себя операционную систему Windows®, дистрибутивы операционной системы Linux® и в том числе операционные системы AIX и OS/2® фирмы IBM. Большей частью можно использовать любую операционную систему, поддерживающую функции, раскрытые в этой заявке.
[96] Кроме того, запоминающее устройство 2112 показано содержащим программу 2118 развертывания, которая при выполнении процессором 2112 поддерживает развертывание сейсмических сенсорных станций согласно любому из способов, описанных выше в этой заявке. Например, программа развертывания может определять длину троса, который выпущен после развертывания последней сейсмической сенсорной станции. Когда заданное количество троса выпущено, программа развертывания может выдать команду на захват троса следующей сенсорной станцией и развертывание.
[97] В одном варианте осуществления изобретения каждая сейсмическая сенсорная станция может быть снабжена идентифицирующим устройством, таким как, например, метка радиочастотной идентификации (РЧИД). Во время развертывания программа развертывания может определять порядок развертывания сейсмических сенсорных станций на основании механизма идентификации. После возврата сейсмических сенсорных станции по завершении регистрации механизм идентификации может использоваться для подтверждения того, что порядок возврата соответствует порядку развертывания. Кроме того, программа развертывания может быть сконфигурирована для сбора данных с различных сейсмических сенсорных станций согласно порядку развертывания, чтобы сейсмические данные, собираемые с различных сейсмических сенсорных станций, располагались в соответствии с порядком развертывания узлов. Такое расположение может быть предпочтительным, поскольку исключается необходимость в дополнительных этапах переупорядочивания данных во время обработки сейсмических данных.
[98] Хотя изложенное выше касается вариантов осуществления настоящего изобретения, другие и дальнейшие варианты осуществления изобретения могут быть разработаны без отступления от основного объема его, а объем его определяется формулой изобретения, которая следует ниже.
Изобретение относится к области геофизики и может быть использовано при проведении морских сейсмических исследований. Раскрыта система сбора сейсмических данных. Система может включать в себя по меньшей мере первый корпус и второй корпус. Первый корпус может быть выполнен с возможностью разъемного соединения со вторым корпусом. Кроме того, система может включать в себя различные компоненты, такие как один или несколько сейсмических датчиков, генератор тактовых импульсов или запоминающее устройство. Каждый из компонентов может быть размещен в одном из первого корпуса или второго корпуса. Причем первый корпус и второй корпус образуют отверстие для приема несущего элемента. При этом отверстие содержит соединитель, выполненный с возможностью соединения системы сбора сейсмических данных с несущим элементом. Причем соединитель выполнен с возможностью установления физического и по меньшей мере одного из электрического или индукционного соединения между несущим элементом и по меньшей мере одним из первого корпуса и второго корпуса. При этом соединитель выполнен с возможностью нахождения в первом положении, в котором несущий элемент может свободно проходить через отверстие во время развертывания. Технический результат – повышение точности и информативности получаемых данных. 3 н. и 14 з.п. ф-лы, 21 ил.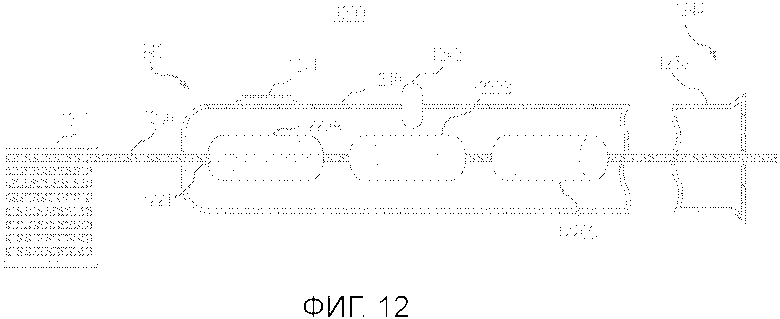
1. Система сбора сейсмических данных, содержащая:
по меньшей мере первый корпус и второй корпус, при этом первый корпус выполнен с возможностью разъемного соединения со вторым корпусом; и
множество компонентов, содержащих:
один или несколько сейсмических датчиков;
генератор тактовых импульсов; и
запоминающее устройство,
причем каждый из множества компонентов размещен в одном из первого корпуса и второго корпуса,
причем первый корпус и второй корпус образуют отверстие для приема несущего элемента, при этом отверстие содержит соединитель, выполненный с возможностью соединения системы сбора сейсмических данных с несущим элементом, причем соединитель выполнен с возможностью установления физического и по меньшей мере одного из электрического или индукционного соединения между несущим элементом и по меньшей мере одним из первого корпуса и второго корпуса, при этом соединитель выполнен с возможностью нахождения в первом положении, в котором несущий элемент может свободно проходить через отверстие во время развертывания.
2. Система сбора сейсмических данных по п. 1, в которой физическое соединение первого корпуса со вторым корпусом приводит к электрическому соединению по меньшей мере первого компонента в первом корпусе со вторым компонентом во втором корпусе.
3. Система сбора сейсмических данных по п. 1, в которой один из первого корпуса и второго корпуса содержит источник электропитания.
4. Система сбора сейсмических данных по п. 1, дополнительно содержащая третий корпус, содержащий источник электропитания, при этом третий корпус выполнен с возможностью соединения с по меньшей мере одним из первого корпуса и второго корпуса.
5. Система сбора сейсмических данных по п. 1, в которой соединитель выполнен с возможностью нахождения во
втором положении, в котором соединитель соединен с несущим элементом для облегчения развертывания системы сбора сейсмических данных.
6. Система сбора сейсмических данных по п. 1, причем система сбора сейсмических данных выполнена с возможностью приема тактового сигнала по несущему элементу развертывания.
7. Система сбора сейсмических данных по п. 6, в которой генератор тактовых импульсов является подчиненным генератором тактовых импульсов, а тактовый сигнал, принимаемый по несущему элементу развертывания, генерируется главным генератором тактовых импульсов, выполненным с возможностью синхронизации подчиненного генератора тактовых импульсов.
8. Система сбора сейсмических данных по п. 1, в которой сейсмические датчики содержат один или несколько акселерометров, геофонов и гидрофонов.
9. Система сбора сейсмических данных, содержащая:
первый корпус, содержащий один или несколько сейсмических датчиков и генератор тактовых импульсов; и
второй корпус, содержащий батарею и запоминающее устройство, при этом первый корпус выполнен с возможностью разъемного соединения со вторым корпусом, и при этом первый и второй корпус являются полностью замкнутыми, и
соединитель, сформированный первым корпусом и вторым корпусом, выполнен с возможностью установления физического и по меньшей мере одного из электрического или индукционного соединения между несущим элементом и по меньшей мере одним из первого корпуса и второго корпуса.
10. Система сбора сейсмических данных по п. 9, в которой физическое соединение первого корпуса со вторым корпусом приводит к электрическому соединению одного или нескольких сейсмических датчиков с запоминающим устройством.
11. Система сбора сейсмических данных по п. 9, в которой второй корпус дополнительно содержит источник электропитания.
12. Система сбора сейсмических данных по п. 11, в которой соединитель расположен на внешней стороне по меньшей мере одного из первого корпуса и второго корпуса и облегчает физическое развертывание системы сбора сейсмических данных.
13. Система сбора сейсмических данных по п. 9, в которой генератор тактовых импульсов выполнен с возможностью приема синхронизирующего сигнала от несущего элемента развертывания, при этом синхронизирующий сигнал принимается от главного генератора тактовых импульсов, соединенного с несущим элементом развертывания.
14. Система сбора сейсмических данных, содержащая:
по меньшей мере первый корпус, содержащий первый электрический интерфейс, и второй корпус, содержащий второй электрический интерфейс, при этом первый корпус выполнен с возможностью разъемного соединения со вторым корпусом; и
множество компонентов, содержащих:
один или несколько сейсмических датчиков;
генератор тактовых импульсов; и
запоминающее устройство,
причем первый корпус и второй корпус образуют отверстие для приема несущего элемента, при этом отверстие содержит соединитель, выполненный с возможностью соединения системы сбора сейсмических данных с несущим элементом, причем соединитель выполнен с возможностью установления физического и по меньшей мере одного из электрического или индукционного соединения между несущим элементом и по меньшей мере одним из первого корпуса и второго корпуса, при этом соединитель выполнен с возможностью нахождения в первом положении, в котором несущий элемент может свободно проходить через отверстие во время развертывания,
при этом каждый из множества компонентов размещен в одном из первого корпуса и второго корпуса, и
причем физическое соединение первого корпуса со вторым корпусом приводит к электрическому соединению первого электрического интерфейса со вторым электрическим интерфейсом.
15. Система сбора сейсмических данных по п. 14, в которой один из первого корпуса и второго корпуса содержит источник электропитания.
16. Система сбора сейсмических данных по п. 15, в которой первый корпус содержит один или несколько сейсмических датчиков, и в которой второй корпус содержит генератор тактовых импульсов, запоминающее устройство и источник электропитания.
17. Система сбора сейсмических данных по п. 14, в которой первый электрический интерфейс и второй электрический интерфейс выполнены с возможностью обмена по меньшей мере одним из сигналов данных, электрической энергии, тактовых сигналов и управляющих сигналов.
| US 8675446 B2, 18.03.2014 | |||
| ЭРЛИФТ | 1941 |
|
SU73499A1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2005 |
|
RU2294000C1 |
| US 5709497 A, 20.01.1998 | |||
| US 5583824 A, 10.12.1996 | |||
| US 6625083 B2, 23.09.2003 | |||
| Резак для вырубания деталей верха обуви | 1957 |
|
SU111691A1 |

