ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Данная заявка испрашивает приоритет предварительной патентной заявки США № 62/509,922, поданной 23 мая 2017 года, озаглавленной «Seismic node deployment system», и предварительной патентной заявке США № 62/517,334, поданной 9 июня 2017 года, озаглавленный «Seismic node deployment system», каждая из которых включена в данный документ посредством ссылки во всей своей полноте и для любых целей.
ОБЛАСТЬ ТЕХНИКИ
Данное раскрытие в целом относится к сбору сейсмических данных, включая, но не ограничиваясь этим, развертывание сейсмического узла для морских сейсмических исследований. Раскрытие также относится к системе или устройству для прикрепления автономных устройств, таких как акустические системы позиционирования или сейсмические узлы, или другие датчиковые узлы, совместно именуемые узлами, к канату или кабелю, или тросу, например, для развертывания в толще воды или другой сейсмической среде.
УРОВЕНЬ ТЕХНИКИ
Современные методы геофизической разведки включают в себя как наземные, так и морские сейсмические исследования. В морских исследованиях, судно для сейсмических исследований обычно буксирует источник колебаний, такой как группа пневматических источников колебаний, который периодически испускает акустические импульсы, генерирующие схлопывание пузырьков воздуха. Акустические волны распространяются через толщу воды и проникают через морское дно или океаническое ложе, где отражаются от границ между подземной поверхностью геологических формаций. Отраженная акустическая энергия обнаруживается группой сейсмических датчиков или приемников, которые генерируют данные сейсмического датчика, которые могут быть обработаны для восстановления отраженного волнового поля и генерирования изображений соответствующего геологического строения.
Как правило, сейсмические приемники распределены вдоль рядов линий кос, буксируемых за сейсмическим судном, или развернуты непосредственно на морском дне вдоль донного кабеля. Приемники также могут быть развернуты в виде группы отдельных автономных датчиковых узлов.
В толще воды акустическая энергия в значительной степени характеризуется распространением акустических волн давления (продольные волны). Таким образом, буксируемые группы сейсмических кос обычно используют чувствительные к давлению приемники, такие как гидрофоны. Волновое поле подземной поверхности, с другой стороны, включает как продольные волны, так и сдвиговые волны (поперечные волны), в дополнение к более сложным сигналам волнового поля. Современные донные сейсмические системы, таким образом, используют чувствительные к движению устройства, такие как геофоны и акселерометры, например, в датчиковой подгруппе с комбинацией гидрофона и многоосных компонентов геофона, чувствительных как к изменению давления, так и к движению (скорости или ускорению) вдоль трех ортогональных осей.
В этом более общем подходе сигналы продольных и поперечных волн объединяются для более точного воспроизведения полного сейсмического волнового поля и для создания более полных изображений геологического строения. Подобные методы могут также применяться в наземных исследованиях, где также доступны данные как о продольной, так и о поперечной волне.
Для точного отслеживания и регистрации значительных объемов данных сейсмического датчика, необходимых для достижения этих результатов, обычно обеспечиваются высокоточные системы тактовой синхронизации, а также локальные компоненты обработки и хранения данных, источник питания и интерфейс, выполненный с возможностью контроля и передачи данных. Поскольку каждый из этих компонентов увеличивает емкость данных, существует постоянная потребность в улучшенных методах сейсмической визуализации, приспособленных для обработки соответственно большего потока данных.
Информация, содержащаяся в этом разделе «УРОВЕНЬ ТЕХНИКИ» описания изобретения, включая любые ссылки, цитируемые в данном документе, и любое описание или их обсуждение, включена только для технических справочных целей и не должна рассматриваться как объект, на который распространяется объем изобретения, определенный в формуле изобретения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Данное раскрытие направлено на сбор сейсмических данных и развертывание сейсмического узла. Варианты реализации системы и способа охватывают, включая в себя, но не ограничиваясь этим, системы, способы и устройство, приспособленные для прикрепления сейсмических узлов, приемников или других автономных воспринимающих устройств, или, в качестве альтернативы, акустических излучателей или других приемопередающих устройств для идентификации местоположения или передачи другой информации (далее именуемые в совокупности «узлами») к канату или кабелю, или тросу для развертывания в толще воды или другой сейсмической среде. В данном раскрытии термин «кабель» относится к канату, кабелю или тросу, или другому несущему элементу, к которому могут быть прикреплены узлы.
В различных примерах и вариантах реализации подходящая система развертывания сейсмического узла может содержать источник кабеля, выполненный с возможностью обеспечения кабеля, вместе с одним или большим количеством узлов, выполненных с возможностью присоединения к кабелю для развертывания в толще воды. Система прикрепления узла выполнена таким образом, чтобы приводить часть кабеля в периодическое движение между источником кабеля и толщей воды, так что скорость кабеля существенно уменьшается для прикрепления сейсмических узлов по отношению к скорости, с которой кабель стравливается в воду и разворачиваются сейсмические узлы. Для целей данного раскрытия термины «периодический» и «периодическое движение» не ограничиваются по смыслу регулярными, циклическими или фиксированными интервалами, а скорее должны толковаться в широком смысле так, чтобы охватывать только периодически повторяющиеся или прерывающиеся интервалы, которые являются переменными и не имеют фиксированных или регулярных временных рамок между событиями.
В данном разделе «СУЩНОСТЬ ИЗОБРЕТЕНИЯ» приведены в упрощенной форме понятия, которые дополнительно описаны ниже в разделе «ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ». Данный раздел «СУЩНОСТЬ ИЗОБРЕТЕНИЯ» не предназначен для определения ключевых признаков или существенных признаков заявленного объекта изобретения, а также не предназначен для использования с целью ограничения объема заявленного объекта изобретения. Более подробное представление признаков, деталей, полезных свойств и преимуществ данного изобретения, как определено в формуле изобретения, представлено в следующем письменном описании различных вариантов реализаций и вариантов осуществлений и проиллюстрировано на прилагаемых графических материалах.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Фиг. 1 представляет собой схематическую иллюстрацию представленной в качестве примера системы сейсмического исследования, выполненную с возможностью сбора сейсмических данных.
Фиг. 2 представляет собой вид сверху типичной системы развертывания сейсмического узла, установленной на задней палубе сейсмического судна.
Фиг. 3 представляет собой вид сбоку в перспективе системы развертывания узла с однопроходной конфигурацией организации кабеля.
Фиг. 4 представляет собой упрощенный схематический вид системы развертывания узла в соответствии с фиг. 3.
Фиг. 5 представляет собой схематический вид системы развертывания узла в двухпроходной конфигурации с неподвижным блоком.
Фиг. 6 представляет собой схематический вид системы развертывания узла в соответствии с фиг. 5 с подвижной кареткой.
Фиг. 7 представляет собой вид сверху системы развертывания сейсмического исследования с несколькими кабелями, установленной на задней палубе сейсмического судна.
Фиг. 8 представляет собой блок–схему, иллюстрирующую способ развертывания сейсмического узла.
Фиг. 9A–9D представляют собой принципиальные схемы, изображающие функциональные этапы варианта реализации для прикрепления и развертывания сейсмического узла.
Фиг. 10А–10С представляют собой принципиальные схемы, изображающие функциональные этапы варианта реализации для извлечения и открепления сейсмического узла.
Фиг. 11А представляет собой изометрический вид варианта реализации системы для развертывания и извлечения сейсмического узла, которая выполняет функциональные этапы в соответствии с фиг. 9А–10C.
Фиг. 11B представляет собой вид сверху системы в соответствии с фиг. 11А.
Фиг. 12 представляет собой блок–схему операционных этапов, выполняемых системой контроля, контролирующей прикрепление и развертывание сейсмического узла в соответствии с фиг. 9A–9D.
Фиг. 13 представляет собой блок–схему операционных этапов, выполняемых системой контроля, контролирующей извлечение и открепление сейсмического узла в соответствии с фиг. 10A–10C.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В этом раскрытии могут быть сделаны ссылки на различные примеры и варианты реализации изобретения. Объем формулы изобретения не ограничен этими конкретными примерами или каким–либо другим конкретно идентифицированным или перечисленным вариантом реализации, за исключением случаев, изложенных на языке формулы изобретения. Любая комбинация раскрытых признаков может быть адаптирована для практического применения изобретения, независимо от того, описана ли она в контексте одного примера или среди различных вариантов реализации, как определено в рамках формулы изобретения.
Хотя некоторые примеры и варианты реализации могут достигать различных преимуществ по сравнению с предшествующим уровнем техники и по сравнению с другими более современными решениями, эти преимущества не ограничивают объем притязаний, за исключением случаев, когда это явно указано. Аспекты, признаки и преимущества раскрытых примеров и вариантов реализации являются просто иллюстративными, а ссылки на конкретные признаки изобретения в описании не должны рассматриваться как обобщение любого из заявленных вариантов реализации, за исключением случаев, когда эти признаки прямо включены в язык формулы изобретения.
Развертывание сейсмического исследования
На фиг. 1 проиллюстрировано типичное сейсмическое исследование (или система исследования) 100 с группой сейсмических приемников или автономных узлов 110, развернутых в толщу воды 120 вдоль одного или большего количества канатов или кабелей 115. Толща воды 120 проходит от верхней поверхности 122 до океанического ложа или другой нижней поверхности 124 над нефтяным резервуаром или другой подземной структурой 126, представляющей интерес для сейсмического исследования.
В зависимости от применения, канаты или кабели 115 могут буксироваться через толщу воды 120 за одним или большим количеством сейсмических суден 130, применяя подходяще адаптированную систему 150 развертывания сейсмического исследования. Подходящие сейсмические судна 130 также могут быть выполнены с возможностью развертывания узлов 110 на морском дне или другой донной поверхности 124, например, с узлами 110, распределенными вдоль отдельных кабелей 115 над резервуаром или другой подземной структурой 126, показанной на фиг. 1. Узлы 110 могут быть сейсмическими узлами, приемниками или другими автономными чувствительными устройствами или, в качестве альтернативы или дополнительно, акустическими излучателями или другими приемопередающими устройствами для идентификации местоположения или другой передачи информации, прикрепленными вдоль кабеля 115. Узлы 110 также могут быть подвешены на глубине в толще воды 120 между верхней поверхностью 122 и океаническим ложе или морским дном 124 или может быть использована комбинация донных кабелей 115, буксируемых узлов 110 и подвешенных узлов 110.
В то время как ссылки могут быть сделаны на морское ложе или морское дно в отношении этого конкретного примера, развертывание узла в соответствии с этим раскрытием не обязательно ограничено каким–либо конкретным водным массивом или другой сейсмической средой 120. Скорее, узлы 110 могут быть развернуты в любом водном массиве, морской, наземной или другой сейсмической среде 120, включая океаны, озера, реки и т. д. Соответственно, использование терминов море, морское дно, морское ложе и тому подобных следует понимать в широком смысле, чтобы охватить все водные массивы 120 и все морские или наземные поверхности 124, подходящие для развертывания узла для обнаружения распространяющейся сейсмической энергии или другого сигнала или энергии, регистрируемых датчиком любого типа, помещенным в корпус в качестве узла.
В некоторых вариантах реализации отдельные кабели 115 могут быть изготовлены из синтетического или металлического материала с предварительно определенной удельной плотностью по отношению к толще воды 120, в которой погружены кабели 115. В некоторых вариантах реализации отдельные кабели 115 могут иметь конфигурацию пассивного кабеля, например, без внутренних электрических проводников или других фиксировано соединенных проводами сигнальных элементов. В других вариантах реализации кабели 115 могут включать в себя встроенные проводники для передачи одного или большего количества тактовых сигналов, сигналов данных, сигналов управления и мощности между отдельными сейсмическими узлами или приемниками 110. Таким образом, каждый кабель 130 может иметь пассивную конфигурацию, отсутствующие сигнальные или силовые соединения между отдельными приемниками или узлами 110, распределенными вдоль каждого кабеля 115, или активную конфигурацию, в которой сигнальные и/или силовые соединения обеспечиваются между приемниками или узлами 110.
В конкретных вариантах реализации узлы 110 могут быть развернуты с помощью автономного или дистанционно управляемого сейсмического судна 130, работающего либо на поверхности 122 или на выбранной глубине внутри толщи воды 120, или на нижней поверхности 124. В других примерах один или большее количество узлов 110 могут быть оборудованы системами направления, обеспечения движения и/или извлечения, приспособленными для навигации узлов 110 через толщу воды 120, когда они расположены вдоль кабелей 115, или для извлечения узлов 110 и кабелей 115 из толщи воды 120.
Сейсмические узлы 110 также могут быть выполнены с возможностью внешней связи при развертывании в толще воды 120, например, посредством оконечного устройства или приемопередающего устройства 145, развернутого вдоль кабеля 115, с проводным или беспроводным (например, акустическим, индуктивным или емкостным) соединением для передачи данных в сейсмической системе концентратора или буя 140. Беспроводная передача данных также может быть обеспечена непосредственно между отдельными узлами 120 и сейсмическим судном 130, а также между сейсмическим судном 130 и одним или большим количеством концентраторных устройств 140.
Подходящие концентраторные устройства 140 могут быть оснащены системой спутникового глобального позиционирования (GPS, global positioning satellite) или другой системой позиционирования или навигации для определения данных местоположения и времени для узлов 110. Подходяще выполненный концентратор 140 или станция 145 «задающего» узла также могут быть снабжены высокоточным генератором тактовых импульсов для синхронизации информации о времени для сейсмических узлов 110, расположенных вдоль каждого соответствующего кабеля 115.
Подходящие концентраторы 140 или станции 145 задающего узла также могут быть оснащены устройствами генерирования энергии, накопления энергии и логики управления для выполнения проверок качества сейсмических данных, собранных отдельными приемниками узлов 110, а также рабочими командами, выбираемыми для выполнения испытаний качества и работоспособности станции, для передачи приоритетного подмножества сейсмических данных, для включения или выключения отдельных узлов 110 или для входа в режим сбережения энергии.
Сбор сейсмических данных
При проведении сейсмического исследования 100 одно или большее количество сейсмических суден 130 могут быть выполнены с возможностью буксировки сейсмического источника 125 (или группы источников) 125, либо отдельно, либо в сочетании с группой сейсмических приемников или узлов 110, расположенных вдоль одного или большего количества буксируемых кабелей, кос или узловых линий 115. В качестве альтернативы или в комбинации узлы 110 также могут быть развернуты в группе из одного или большего количества океанических донных кабелей 115, например, расположенных на нижней поверхности 124 толщи воды 120, или на выбранной глубине ниже верхней поверхности 122 и над нижней поверхностью 124. Сейсмические кабели 115, таким образом, охватывают различные варианты реализации буксируемой косы, океанического донного кабеля и подвесного кабеля, а также конфигураций морских сейсмических систем.
Аналогично, могут быть использованы множество кораблей с источником колебаний или других сейсмических суден 130, а также кабелей 115, которые могут располагаться в комбинации с буксируемыми, расположенными на океаническом дне и подвешенными сейсмическими группами, в зависимости от желаемой конфигурации системы 100 сейсмического исследования. В вариантах реализации с несколькими суднами, несколько буксируемых источников 125 могут быть выполнены с возможностью работы независимо или для того, чтобы излучать сейсмическую энергию 142 скоординированным образом по существу в одно и то же время, например, в соответствии с режимом одновременного источника.
В зависимости от варианта реализации каждое устройство 125 источника колебаний может включать в себя один или большее количество компонентов источника сейсмических колебаний, выполненных с возможностью генерирования сейсмической энергии в форме акустических волн 142, распространяющихся через толщу воды 120. Например, группа или подгруппа пневматических источников колебаний 125 может быть выполнена с возможностью генерации акустических волн 142 путем испускания управляемых ударных волн сжатого воздуха или могут использоваться другие пневматические, механические или электромеханические компоненты источника колебаний 125.
Часть сейсмических волн 142, распространяющихся вниз через толщу воды 120, будет проникать через океаническое ложе 124 и отражаться от нефтяного резервуара или другой подземной геологической структуры 126. Часть отраженной сейсмической энергии может распространяться обратно через океаническое дно 124 к сейсмическим узлам 110, развернутым вдоль одного или большего количества океанических донных кабелей 115, и обратно через толщу воды 120 к приемникам или узлам 110, расположенным вдоль одного или большего количества кабелей 115, буксируемых с помощью сейсмического судна 130, или подвешенных на глубине в толще воды 120.
Отражения также возникают как на верхней поверхности 122, так и на нижней поверхности 124, что приводит к сложной комбинации распространяющихся вверх и движущихся вниз компонентов сейсмического волнового поля. Таким образом, подавление волн–спутников и другие передовые методы обработки применяются к результирующим сейсмическим данным, полученным узлами 110, для генерации изображений подземных слоев и других соответствующих геологических структур. Изображения могут быть проанализированы геологами, инженерами и другими промышленными пользователями, чтобы идентифицировать соответствующие особенности подземных резервуаров 126 и других геологических структур, которые могут включать в себя углеводороды или другие природные ресурсы, и найти и охарактеризовать другое интересующее геологическое строение.
Развертывание сейсмического узла
Во многих ситуациях может быть предпочтительным прикрепить сейсмические узлы 110 к кабелю 115, когда группа приемных датчиков разворачивается, и открепить узлы 110 от кабеля 115, когда группа приемных датчиков извлекается. Это обеспечивает ряд преимуществ. Сначала кабель 115 может быть легко намотан на катушки сразу после удаления узлов 110. Если бы узлы 110 были постоянно прикреплены к кабелю 115, было бы трудно хранить кабель 115 без повреждения узлов 110. Кроме того, было бы трудно пропустить кабель 115 с прикрепленными узлами 110 через направляющий и приводной блоки, необходимые для развертывания кабеля 115 в толщу воды 120 и извлечения из нее кабеля 115. Кроме того, значительно проще очищать, обслуживать, перезаряжать и загружать данные из узлов 110, если они откреплены от кабеля 115. Например, после открепления узлы 110 могут быть размещены на станциях зарядки и загрузки данных. Это было бы чрезвычайно трудно сделать, если бы узлы 110 оставались прикрепленными к кабелю 15.
Фиг. 2 представляет собой вид сверху, показывающий типичную систему 150 развертывания сейсмического исследования, например, установленную на площадке 135 задней палубы сейсмического судна 130. В зависимости от варианта реализации система 150 развертывания сейсмического исследования может включать в себя кабельную катушку, лебедку или источник 155 кабеля для соответствующего кабеля 115, вместе с системой 160 обработки и прикрепления узла, включающую в себя устройство 200 буферизации кабеля для прикрепления узлов 110 к кабелю 115, например, расположенное между носовым и кормовым направляющими или блоками 170 и 175. Механизм 165 позиционирования/извлечения узла может быть выполнен с возможностью позиционирования сейсмических узлов 110 по отношению к кабелю 115 для прикрепления и открепления, а система 180 с приводимым в движение шкивом может быть выполнена с возможностью контролирования скорости и натяжения кабеля 115 при развертывании узлов 110 в толщу воды 120 и извлечения из нее.
В некоторых вариантах реализации может быть предусмотрен тип системы 150 развертывания узла с одним кабелем, а сейсмическое судно 130 может принимать форму судна–преследователя или беспилотного автономного судна (БАС). В качестве альтернативы, множество систем развертывания может быть расположено на задней палубе сейсмического судна 130, чтобы развернуть группу сейсмических узлов 110 на нескольких канатах или кабелях 115, как описано ниже.
Как показано на фиг. 2, катушечная система 155 подает канат или кабель 115 к соответствующей системе 160 прикрепления узла через одну или большее количество носовых кабельных направляющих или блоков 170. Узлы 110 прикреплены к выбранным позициям вдоль каждого кабеля 115 с помощью системы 160 прикрепления узла и развернуты вдоль кабеля 115, идущего от системы 160 прикрепления узла к шкиву 180 через одну или большее количество кормовых кабельных направляющих или блоков 175. В качестве альтернативы, кабели 115 могут проходить по существу непосредственно от катушки 155 к системе 160 прикрепления узла или от системы 160 прикрепления узла к шкиву 180 или обоим, а одна или большее количество кабельных направляющих или блоков 170 и 175 могут не использоваться.
Система 180 шкива управляет натяжением в кабеле 115, когда узлы 110 развертываются в толщу воды 120 или извлекаются из нее, причем узлы 110 расположены в выбранных позициях вдоль кабеля 115. В некоторых примерах узлы 110 развертываются, когда кабель 115 стравливается через кормовой конец или корму 136 сейсмического судна 130 как показано на фиг. 2. Узлы 110 и кабель 115 также могут быть стравлены и развернуты через борт судна 130 или над носом.
Система 160 прикрепления узла выполнена с возможностью управления скоростью кабеля 115 пока узлы 110 прикрепляются. В конкретном варианте реализации в соответствии с фиг. 2 и 3, устройство 200 буферизации кабеля системы 160 прикрепления узла использует каретку, совершающую возвратно–поступательное движение, и блочный механизм, выполненный с возможностью изменения скорости кабеля 115 в месте для осуществления прикрепления узла (или точке для осуществления прикрепления A), при этом каретка 210 перемещается назад и вперед со скоростью возвратно–поступательного движения ±VR с целью прикрепить узлы 110 к кабелю 115 с по существу нулевой относительной скоростью или с существенно уменьшенной скорость по сравнению со скоростью выхода за борт кабеля, как описано в данном документе.
Скорость, как правило, относится к абсолютному значению или абсолютному значению заданного вектора скорости, в то время как вектор скорости может быть положительным, отрицательным или нулевым. Для компонентов, совершающих возвратно–поступательное движение, таких как каретка 210, скорость также может быть определена количественно в терминах максимального значения VR, при этом понятно, что скорость каретки изменяется между положительным и отрицательным значениями ±VR. Аналогично, амплитуда AR может использоваться для описания максимального абсолютного смещения, в то время как положение каретки 210 изменяется в пределах ±AR. В зависимости от контекста, скорость и вектор скорости также иногда используются взаимозаменяемо, и термины не следует истолковывать как ограниченные каким–либо конкретным определением, за исключением случаев, когда это прямо указано.
В более общем случае, скорость для осуществления прикрепления, с которой кабель 115 перемещается, когда прикрепляются узлы 110, может существенно отличаться от скорости подачи кабеля v1, при которой кабель 115 обеспечивается катушкой 155, и от скорости выхода за борт кабеля v2, при которой кабель 115 стравливается в толщу воды 120. В некоторых вариантах реализации, например, скорость подачи кабеля v1 и скорость выхода за борт кабеля v2 может быть по существу одинаковой, например, в диапазоне составляющем вплоть до около 2,5 м/с или более, в соответствии с навигационной скоростью v0 судна 130 по отношение к окружающей толще воды 120 при развертывании узлов 110 вдоль кабеля 115. В качестве альтернативы навигационная скорость может варьироваться, например, от около 1 м/с или менее до около 5 м/с или более или от около 2 узлов до 10 узлов.
Однако в отличие от других конструкций, механизм 160 прикрепления узла выполнен с возможностью изменения вектора скорости кабеля 115 в точке для осуществления прикрепления A, так что узлы 110 могут быть прикреплены, когда смежная часть кабеля 115 движется с существенно меньшей относительной скоростью или по существу при нулевой скорости, например, измеренной относительно задней палубы 135.
Система 160 прикрепления узла также функционирует в качестве системы буферизации кабеля, которая может быть использована, чтобы остановить или замедлить кабель 115 в выбранных положениях, контролируя набортную длину кабеля 115 для управления и поддержания напряжения без существенного изменения скоростей выхода за борт или извлечения на шкиве или лебедке 180 или скорости стравливания кабеля катушкой на катушке 155. Например, если кабель 115 или узел 110 застрял или зацепился за объект во время развертывания или извлечения, или если узел не был надлежащим образом прикреплен или откреплен, устройство 200 буферизации кабеля может использоваться для управления длиной и натяжением в кабеле 115 до тех пор, пока препятствие вдоль кабеля 115 или узла 110 не будет устранено, или могут быть предприняты другие корректирующие меры.
Таким образом, длина буферного каната внутри устройства 200 буферизации кабеля может быть управляемой для уменьшения натяжения и напряжения на компонентах 155 и 180 катушки, лебедки и шкива и/или для контроля или поддержания по существу постоянного натяжения и/или скорости стравливания на катушке 155 и развертывания/извлечения на шкиве 180. В конкретных применениях зацеп или другое препятствие, такое как неправильно прикрепленный или открепленный узел 110, может быть расположено вдоль кабеля 115, при этом устройство 200 буферизации кабеля выполнено с возможностью управления буферной длиной кабеля 115, чтобы поддерживать скорость или натяжение, при котором кабель 115 обеспечивается с помощью источника 155 кабеля или при котором кабель 115 развертывается или извлекается из толщи воды с помощью шкива или лебедки 180, или обоими, в то время как зацеп или другое препятствие выводится из зацепления. В общем, скорость лебедки в сочетании с одним или большим количеством устройств 200 буферизации может быть отрегулирована для облегчения прикрепления и открепления узла и для управления удалением зацепов или других препятствий на кабеле 115.
Например, система 160 прикрепления узла может быть снабжена кареткой, совершающей возвратно–поступательное движение, и блочным механизмом 210, который перемещается назад и вперед с амплитудой положения AR и при максимальной скорости VR равной около половины скорости выхода за борт (VR ≈ ± ½V1). В этом варианте реализации скорость для осуществления прикрепления может быть приблизительно равна нулю, как определено скоростью кабеля 115 в точке или месте для осуществления прикрепления A, когда узел 110 прикрепляется. В качестве альтернативы скорость возвратно–поступательного движения тележки VR может изменяться, а скорость для осуществления прикрепления будет варьироваться соответственно. В более общем смысле, из–за возвратно–поступательного движения устройства 210 кабельной каретки скорость кабеля 115 может быть существенно уменьшена относительно узла 110 или кабель 115 может быть по существу остановлен на период времени, определяемый вектором скорости возвратно–поступательного движения VR и амплитудой AR, тем самым облегчая безопасное и надежное прикрепление узла 110 к кабелю 115.
Максимальное абсолютное значение VR вектора скорости возвратно–поступательного или переменного движения каретки ±VR также может быть определено относительно скорости подачи или стравливания кабеля v1, в отличие от скорости выхода за борт v2. В среднем скорости подачи и стравливания кабеля могут быть по существу одинаковыми (то есть v1≈v2), и в одном варианте реализации скорость подачи кабеля v1 и скорость выхода за борт v2 могут поддерживаться по существу постоянными во время развертывания узлов 110 в толщу воды 120, и они могут быть по существу аналогичны навигационной скорости v0 судна 130. В альтернативном варианте реализации скорость выхода за борт v2 может поддерживаться по существу постоянной, в то время как скорость подачи v1 может изменяться, чтобы способствовать возвратно–поступательному перемещению устройства 210 кабельной каретки и прикреплению узла 110 к кабелю 115.
Фиг. 3 представляет собой вид сбоку системы 150 развертывания, выполненной на задней палубе 135 сейсмического судна 130, с однопроходной системой или устройством 160 прикрепления узла. Как показано на фиг. 3, система 155 лебедки или катушки подает кабель 115 к системе 160 прикрепления узла через одну или большее количество направляющих или блоков 170. Кабель 115 делает один проход через устройство 200 буферизации кабеля, например, между первым и вторым блоками 220, прикрепленными к каретке или раме 210, совершающей возвратно–поступательное движение.
Узлы 110 располагаются смежно с кабелем 115 с помощью устройства 165 позиционирования и извлечения, и прикрепляются к кабелю 115, когда смежный участок кабеля 115 имеет желаемую скорость. Например, узлы 110 могут быть прикреплены к кабелю 115 посредством зажимного механизма или ремня, когда смежная секция является по существу неподвижной по отношению к задней палубе 135, или при существенно уменьшенной скорости по сравнению со скоростью стравливания кабеля V1 в системе 155 катушки, или относительно скорости выхода за борт V2, при которой узлы 110 размещаются в толще воды 122 вдоль кабеля 115.
Как показано на фиг. 3, значение величины относительной скорости кабеля 115, смежного с сейсмическим узлом 110, зависит от скорости возвратно–поступательного движения VR, а также количества проходов кабеля 115, совершаемых по блокам 220. Относительная скорость также изменяется во время цикла возвратно–поступательного движения, увеличиваясь или уменьшаясь в зависимости от скорости и направления движения каретки 210.
В «однопроходной» конфигурации в соответствии с фиг. 3, кабель 115 проходит по первому (одиночному) блоку 220 на одном конце каретки 210, совершающей возвратно–поступательное движение, и второму (одиночному) блоку на противоположном конце каретки 210, совершающей возвратно–поступательное движение. Когда каретка 210 совершает возвратно–поступательные движения, кабель либо выбирается, либо высвобождается с обеих сторон соответствующих блоков 220, в зависимости от направления движения. Если абсолютное значение величины скорости возвратно–поступательного движения VR равна половине скорости стравливания кабеля v1 (или скорости выхода за борт v2), то участок кабеля 115, смежный с узлом 115 будет тем самым неподвижным, по меньшей мере для части цикла возвратно–поступательного движения. Путем выбора по существу квадратной формы волны для вектора скорости возвратно–поступательного движения VR, в отличие от синусоидальной или гармонической формы, период относительно нулевой (или существенно уменьшенной) относительной скорости может быть увеличен как доля периода возвратно–поступательного движения.
В зависимости от скорости развертывания и амплитуды возвратно–поступательного движения это может обеспечить окно порядка четверти или более периода возвратно–поступательного движения, в течение которого узел 110 может быть прикреплен к кабелю 115 при по существу нулевой относительной скорости; то есть, в то время как и узел 110, и смежная секция кабеля 115 являются по существу неподвижными относительно задней палубы 135. В качестве альтернативы форма колебаний возвратно–поступательного движения может быть гармонической, и узлы 110 могут быть прикреплены при относительно минимальной скорости, определенной во время движения каретки 210, например, когда каретка движется вверх или вниз относительно задней палубы 135, в зависимости от конфигурации, и кабель 115 по существу неподвижен относительно узла 110 в точке для осуществления прикрепления А.
В других вариантах реализации относительная скорость для осуществления прикрепления может быть выбрана, чтобы быть существенно ниже, чем либо скорость стравливания кабеля v1, как определено на катушке 155, либо скорости выхода за борт v2, как определено в кормовой части системы 180 шкива. В более общем смысле, относительная скорость кабеля, смежного с местом для осуществления прикрепления A, изменяется между более высокими и более низкими значениями в разных точках в течение цикла возвратно–поступательного движения каретки 210, и скорость для осуществления прикрепления может выбираться соответствующим образом.
Фиг. 4 представляет собой упрощенный схематический вид системы развертывания узла в соответствии с фиг. 3. Как показано на фиг. 4, система 160 прикрепления узла обеспечена в однопроходной компоновке с двумя блоками 220, расположенными на противоположных концах стола или пластинчатой каретки 210, совершающей возвратно–поступательное движение. В то время как каретка 210 показана горизонтальной относительно задней палубы 135 на фиг. 3, это является условием графического изображения и охватываются как горизонтальная, так и вертикальная ориентации. Аналогично, хотя направление возвратно–поступательного движения показано в целом перпендикулярно или ортогонально к общей траектории кабеля 115 между катушечным источником 155 и шкивом 180, продольная, поперечная и наклонная ориентации также охватываются.
Система 400 механического привода также проиллюстрирована и выполнена с возможностью приведения каретки 210 в возвратно–поступательное движение с абсолютным значением вектора скорости VR, как это определено относительно задней палубы и фиксированных компонентов, таких как система 155 кабельной катушки и шкив 180. Привод 400 может быть выполнен с возможностью приводить каретку 210 в периодическое движение с по существу квадратной, пилообразной или другой несинусоидальной скоростью или положением формы колебаний, чтобы увеличить долю периода возвратно–поступательного движения, в течение которого кабель 115 является по существу неподвижно смежным с узлом 110 в точке для осуществления прикрепления А. В качестве альтернативы возвратно–поступательное движение может быть по существу гармоническим и синусоидальным. В других вариантах реализации периодическое движение может происходить с переменными или прерывистыми интервалами без фиксированного или регулярного временного интервала между событиями, а, скорее, происходит по команде для подачи сигнала на прикрепление узла 110.
В одном варианте реализации, привод 400 может быть выполнен с возможностью выполнять один цикл возвратно–поступательного движения при получении команды от системы контроля, контролирующей развертывание узла, чтобы облегчить прикрепление узла. Последовательность таких команд может быть выдана через переменные или постоянные временные интервалы, чтобы присоединить узлы 110 в желаемых местах на кабеле 115. Аналогичным образом, систему 155 кабельной катушки также можно контролировать для изменения скорости, с которой подается кабель 115, во взаимодействии с движением каретки 210, определяемой системой 400 привода, или скорость подачи может быть по существу постоянной во время развертывания, как описано выше.
Привод 400 также может быть выполнен с возможностью регулировки периода возвратно–поступательного движения, чтобы прикрепить узлы 110 с желаемым интервалом вдоль кабеля 115. Как величину скорости возвратно–поступательного движения, так и амплитуду движения можно также регулировать в соответствии со скоростью стравливания и выхода за борт кабеля 115, а также с желаемым временным окном для прикрепления узлов 110 в желаемом месте вдоль кабеля 115, при желаемой относительной скорости.
Фиг. 5 представляет собой схематический вид системы 150 развертывания узла в конфигурации с зафиксированными блоками 225, прикрепленными к неподвижному конструктивному элементу 215, и подвижными блоками 220, прикрепленными к каретке 210, совершающей возвратно–поступательное движение. Это является двухпроходным вариантом реализации, когда по существу нулевая скорость кабеля может быть достигнута в точке для осуществления прикрепления А с кареткой 210, совершающей возвратно–поступательное движение, при приблизительно одной четвертой скорости стравливания или выхода за борт (например, VR ≈ v1/4 или VR ≈ v2/4). Система 400 механического привода предназначена для приведения каретки 210 в возвратно–поступательное движение с желаемой амплитудой, периодом и формой циклической волны, как описано выше.
Фиг. 6 представляет собой схематический вид системы 150 развертывания узла в двухпроходной конфигурации с четырьмя блоками 220, зафиксированными на каретке 210, совершающей возвратно–поступательное движение. Аналогично двухпроходному варианту реализации с зафиксированным блоком в соответствии с фиг. 5, подходящий механический привод 400 может быть выполнен с возможностью привода каретки 210 с абсолютным значением вектора скорости возвратно–поступательного движения VR, составляющим примерно одну четвертую скорости стравливания кабеля v1 или скорости выхода за борт v2, чтобы обеспечить временное окно в пределах периода возвратно–поступательного движения, в течение которого часть кабеля 115 является по существу неподвижно смежной с узлом 110 в точке для осуществления прикрепления А.
Двухпроходная конфигурация в соответствии с фиг. 6 работает аналогично однопроходной конфигурации в соответствии с фиг. 5. Еще одна особенность состоит в том, что имеется несколько положений B, C, D, в которых кабель 115 будет иметь существенно меньшую относительную скорость (или по существу нулевую скорость) относительно задней палубы 135, во время определенной фазы возвратно–поступательного движения каретки 210. Как показано на фиг. 5, например, существует фаза, в которой канат или кабель 115 могут иметь более низкую или нулевую скорость относительно узла 110 в точке для осуществления прикрепления А. Это происходит потому, что когда каретка 210 движется в направлении приспособления 215, нижний левый блок 220 утрачивает провисание, которое должно пройти через систему 200 прикрепления узла и выйти за борт. На фиг. 6, узел 110 может быть прикреплен в любом из местоположений B, C и D. Это потому, что провисание, утраченное нижним левым блоком 220, может быть взято на себя верхним правым блоком 220.
Фиг. 7 представляет собой вид сверху системы 150 развертывания сейсмического исследования с несколькими кабелями, установленной на задней палубе сейсмического судна. Как показано на фиг. 7, система 150 развертывания может включать в себя множество из двух или большего количества отдельных систем 155 источника кабеля, причем соответствующие системы 160 обработки узла выполнены с возможностью хранения и обеспечения ряда узлов 110 для прикрепления к соответствующему множеству кабелей 115.
При такой компоновке система 160 прикрепления узла может быть продольно ориентирована с каретками 210, совершающими возвратно–поступательное движение со скоростью VR по существу вдоль основной траектории каждого кабеля 115 между соответствующими катушками 155 источника кабеля и системой 180 шкива. В качестве альтернативы, возвратно–поступательное движение может быть по существу перпендикулярным, наклонным или поперечным по отношению к носовой и кормовой частям кабеля 115 и либо горизонтальным по отношению к задней палубе 135, либо в вертикальном направлении, как описано выше.
В более общем случае система 150 развертывания может быть приспособлена для обеспечения одного или большего количества мест для осуществления прикрепления, в которых относительная скорость кабеля 115 по существу равна нулю по отношению к узлу 110 и задней палубе 130 или существенно меньше, чем скорость выхода за борт в течение выбранного временного окна в течение периода возвратно–поступательного движения. Временное окно зависит от скорости каретки и амплитуды смещения и может варьироваться от короткого или кратковременного окна прикрепления в диапазоне от нескольких процентов периода возвратно–поступательного движения до 10–25% периода или более существенной части в диапазоне от 25% до 50% или более в зависимости от временного профиля возвратно–поступательного движения.
Конфигурация блока и направляющей кабеля также может быть адаптирована для уменьшения максимальной скорости возвратно–поступательного движения VR каретки 210 как в абсолютном смысле относительно задней палубы 135, так и в виде доли от скорости подачи кабеля v1 и скорости выхода за борт v2. В более общем смысле, временное окно, в течение которого относительная скорость кабеля 115 уменьшается вблизи различных мест для осуществления прикрепления A, B, C, D, может быть увеличено до абсолютного диапазона составляющего до 1–2 секунд или более, до 2–5 секунды или более, до 5–10 секунд или более, или до 10–15 секунд или более в зависимости от скорости каретки и амплитуды смещения, а также временного профиля возвратно–поступательного движения, как описано выше.
Кроме того, конфигурация блока и направляющая может быть выполнена с возможностью обеспечения нескольких точек для осуществления прикрепления А, В, С, D, для подготовки последовательного прикрепления узла в выбранных местах вдоль кабеля 115, увеличивая эффективность развертывания для конфигураций сейсмических групп с большим числом узлов 110. Места также могут быть выбраны для уменьшения помех между прикрепленными узлами 110 и блочной системой, например, путем выбранного размещения на каретке 210 или с помощью комбинации зафиксированных и совершающих возвратно–поступательное движение компонентов блока, как показано на фиг. 5.
Компоновка каретки и блока также может быть выполнена таким образом, чтобы максимальная скорость возвратно–поступательного движения VR каретки 210 составляла около половины или меньше скорости кабеля v2, при которой разворачиваются сейсмические узлы, или аналогичной доли подачи источника кабеля v1, например, в однопроходной конфигурации. Максимальная скорость возвратно–поступательного движения VR также может составлять примерно одну четверть или менее от скорости подачи кабеля V1 или скорости выхода за борт V2, например, в двухпроходной конфигурации. В более общем смысле, устройство 200 буферизации кабеля может быть выполнено с комбинацией блоков 220, прикрепленных к каретке 210, и стационарных блоков 225, прикрепленных к стационарному приспособлению 215, так что максимальная скорость возвратно–поступательного движения VR каретки 210 составляет долю 1/n или менее скорости кабеля, при которой разворачиваются сейсмические узлы, например, где n составляет от двух до восьми включительно, или когда n равно восьми или более.
Фиг. 8 представляет собой блок–схему, иллюстрирующую способ 300 развертывания сейсмического узла, например, согласно системе 150 развертывания, как описано в данном документе. Как показано на фиг. 8, способ 300 включает в себя один или большее количество этапов обеспечения кабеля (этап 310), стравливания конца кабеля в толщу воды (этап 320), приведения участка кабеля в возвратно–поступательное движение (этап 330) и присоединения одного или большего количества сейсмических узлов к кабелю (этап 340) для развертывания (этап 350), когда скорость для осуществления прикрепления может быть уменьшена относительно скорости выхода за борт, при которой стравливается конец кабеля. Указанные этапы могут выполняться в любом порядке или комбинации, с одним или большим количеством дополнительных этапов или без них, такими как буферизация кабеля и контролирование натяжения в кабеле (этап 360), контролирование скорости, с которой обеспечивается кабель (этап 370), и извлечение узлов (этап 380), а также любые дополнительные этапы, описанные в данном документе.
Обеспечение кабеля (этап 310) может быть выполнен с помощью кабельной катушки, лебедки или аналогичного источника кабеля. Конец кабеля может быть стравлен в воду (этап 320) с использованием системы шкива.
Участок кабеля приводится в возвратно–поступательное движение (этап 330) относительно конца, стравливаемого в воду, так что относительная скорость участка кабеля, к которому прикрепляются узлы (этап 340), уменьшается относительно скорости выхода за борт, при которой кабель стравливается, а узлы развертываются (этап 350). Натяжение может контролироваться путем буферизации кабеля (этап 360) перед развертыванием посредством системы шкива, например, расположенной между толщей воды и секцией кабеля, находящейся в возвратно–поступательном движении. Скорость, с которой подается кабель, также можно контролировать (этап 370), например, чтобы регулировать натяжение в секции кабеля, к которой прикрепляются узлы.
Один или большее количество сейсмических узлов присоединяются или прикрепляются к секции кабеля с уменьшенной скоростью для осуществления прикрепления (этап 340), так что прикрепленные сейсмические узлы могут быть развернуты в воде на кабеле. Например, скорость для осуществления прикрепления может быть уменьшена по существу до нуля по отношению к сейсмическому узлу или площадки задней палубы, когда сейсмический узел соединяется со смежной секцией кабеля.
Устройство прикрепления и развертывания узла также может функционировать для буферизации длины каната или кабеля (этап 160) и может использоваться для остановки или замедления кабеля для управления и поддержания скорости и натяжения (этапы 160, 170). Например, буфер может быть использован для поддержания по существу постоянными скорости выхода за борт/извлечения, в то же время изменяя скорость и натяжение в других местах на палубе, как описано в данном документе. В конкретных случаях применения вдоль кабеля может образовываться зацеп или другое препятствие, и может применяться буферизация для управления длиной кабеля, с целью поддерживать скорость и натяжение, при которых обеспечивается кабель, или при которых кабель развертывается в толщу воды или извлекается из нее, пока зацеп или другое препятствие выводится из зацепления.
Например, канат или кабель (или узел на канате или кабеле) могут запутаться или зацепиться за что–нибудь в воде или на борту судна. Узлы также могут быть неправильно зацеплены или отцеплены, образуя препятствие по всей длине кабеля. В таком случае буферизация может использоваться для управления длиной кабеля, а также скоростью и натяжением кабеля, до тех пор, пока кабель или узел не будут освобождены, препятствие устранено, могут быть приняты другие корректирующие меры. Также можно управлять длиной кабельного буфера, чтобы уменьшить натяжение и нагрузку на стравливающую катушку и/или на лебедку или шкив для развертывания, а также поддерживать постоянную скорость и/или натяжение стравливания во время развертывания и извлечения узла, сохраняя при этом безопасность персонала и оборудования. В системах предшествующего уровня техники без устройства буферизации может быть нежелательным делать внезапные изменения скорости и натяжения кабеля, чтобы устранить зацепы и другие препятствия, и может быть более трудно приспосабливаться к таким изменениям, когда они происходят, без повышенного риска повреждения или потери оборудования.
Альтернативный вариант осуществления системы 500 развертывания сейсмического узла изображен на фиг. 9А–10C. Система 500 выполнена с возможностью прикрепления и открепления множества сейсмических приемных узлов 504 на кабель 502 и с него для развертывания и возврата на морское судно. Узлы 504 могут быть сейсмическими узлами, приемниками или другими автономными чувствительными устройствами или, в качестве альтернативы или дополнительно, акустическими излучателями или другими приемопередающими устройствами для идентификации местоположения или другой передачи информации, прикрепленные в местах, разнесенных вдоль кабеля 502. Система 500 может включать в себя носовую буферную систему 506 и кормовую буферную систему 508 для контролирования относительной скорости кабеля 502 относительно устройства 510 присоединения узла для прикрепления и открепления множества узлов 504 к кабелю 502 в разнесенных на расстояние местах. Носовая и кормовая буферные системы 506, 508 могут периодически временно отводить участки кабеля 502 для выбора и стравливания участков кабеля 502 для уменьшения скорости участка для прикрепления узла. В некоторых вариантах реализации периодические отклонения кабеля 502 в носовой и кормовой буферных системах 506, 508 могут иметь регулярные интервалы. В других вариантах реализации периодические отклонения могут происходить с прерывистыми интервалами без фиксированного или регулярного временного интервала между событиями, а, скорее, происходят по команде для подачи сигнала на прикрепление или открепление узла 504 к кабелю 502 или с него.
Кабель 502 может храниться на лебедке или катушке 512 для хранения, с которой кабель 502 стравливается для развертывания в толще воды или наматывается для хранения, когда он не используется. Тяговая лебедка или кабельный натяжитель 514 может быть расположен между носовой буферной системой 506 и кормовой буферной системой 508, чтобы поддерживать соответствующее натяжение кабеля 502, когда он стравливается или выбирается. Устройство 510 присоединения узла может быть расположено между кабельным натяжителем 514 и кормовой буферной системой 508.
Носовая буферная система 506 может включать в себя носовой ведущий блок 514, который перемещается в поперечном направлении на горизонтальной рейке 516. В некоторых вариантах реализации приводной двигатель может быть прикреплен к носовому ведущему блоку 514 и выполнен с возможностью перемещения носового ведущего блока 514 назад и вперед вдоль горизонтальной рейки 516. Кормовая буферная система 508 может включать в себя первый кормовой базовый блок 520 и второй кормовой базовый блок 522, оба неподвижно расположены смежно с основанием вертикальной рейки 528. Первый кормовой базовый блок 520 может быть расположен на носовой стороне вертикальной рейки 528, а второй кормовой базовый блок 522 может быть расположен на кормовой стороне вертикальной рейки 526. Кормовой ведущий блок 524 может быть подвижно прикреплен к вертикальной рейке 526 и выровнен между первым и вторым кормовыми базовыми блоками 520, 522. В некоторых вариантах реализации приводной двигатель может быть прикреплен к кормовому ведущему блоку 524 и выполнен с возможностью перемещения кормового ведущего блока 524 вверх и вниз вдоль вертикальной рейки 526.
Представленная в качестве примера операция развертывания системы 500 изображена в серии на фиг. 9A–9D. Чтобы подготовить систему 500 к работе, кабель 502 должен быть размотан с катушки 512 и продет через компоненты. Катушка 512 может приводиться в действие вручную при продевании кабеля 502 через систему 500, то есть через носовую буферную систему 506, кабельный натяжитель 514, устройство 510 присоединения узлов, кормовую буферную систему 508 и через узел выхода за борт (не показан на схемах 9A–9D). Концевой груз может быть подсоединен к первому концу кабеля 502, обычно с использованием палубного крана (не показан).
Первоначально, как показано на фиг. 9А, кабель 502 разматывается с хранения на катушке 512 и продевается вокруг носового ведущего блока 516. Катушка 512 обычно приводится в действие двигателем и функционирует как лебедка, когда она как наматывает, так и разматывает кабель 502 с катушки 512 из–за значительной массы кабеля 502 и соответствующего момента, возникающего при вращении катушки 512. Когда кабель 502 разматывается с катушки 512, катушка 512 обеспечивает натяжение кабеля 512 по мере его стравливания. Носовой ведущий блок 516 установлен с возможностью перемещения на горизонтальной рейке 518 и может приводиться в движение в горизонтальном направлении вдоль горизонтальной рейки 518 с помощью двигателя (не показан), который находится под контролем системы контроля, как дополнительно описано в данном документе. В одном представленном в качестве примера варианте осуществления горизонтальная рейка 518 может включать в себя линейную группу зубьев шестерни вдоль своей длины, а двигатель может поворачивать шестерню, которая взаимодействует с зубьями линейной шестерни, чтобы перемещать носовой ведущий блок 516 назад и вперед на горизонтальной рейке 518.
После намотки вокруг носового ведущего блока 516 кабель 502 затем пропускается через кабельный натяжитель 514, который вытягивает кабель 502 из катушки 512 со скоростью, синхронизированной со скоростью судна. Кабельный натяжитель 514 может состоять из одного или большего количества блоков, через которые проходит кабель 502, и которые выполнены с возможностью обеспечения соответствующего натяжения кабеля 502 при развертывании и извлечении кабеля 502 из толщи воды. Один или большее количество блоков, образующих кабельный натяжитель 514, могут приводиться в движение двигателем с соответствующей зубчатой коробкой скоростей, чтобы защитить носовой ведущий блок 516 и катушку 512 от чрезмерного усилия, которое может быть приложено к кабелю 502 толщей воды.
Кабель 502 затем проходит через устройство 510 присоединения узла, которое выполнено с возможностью прикрепления множества датчиковых узлов 504 последовательно на кабель 502, обычно при фиксированном интервале расстояний (и дополнительно отсоединить узлы 504 от кабеля 502 при противоположной работе). В одном представленном в качестве примера варианте реализации каждый узел 504 может быть оснащен подпружиненным соединителем, который зажимает узел 504 на кабеле 502. Устройство 510 присоединения узла может быть выполнено с возможностью выбора узла 504 из предоставленного источника узлов 504, сжатия пружинного зажима, размещения пружинного зажима вокруг кабеля 502 и освобождения пружинного зажима для соединения узла 504 с кабелем 502.
После прохождения через устройство 510 присоединения узла кабель 502 может быть продет через несколько блоков, образующих кормовой кабельный буфер 508. Первый кормовой базовый блок 520 и второй кормовой базовый блок 522 могут быть расположены в зафиксированных позициях на боковых сторонах основания вертикальной рейки 526, вдоль которой движется кормовой ведущий блок 524. Кормовой ведущий блок 524 может приводиться в движение вертикально вдоль вертикальной рейки 526 с помощью двигателя (не показан), который находится под контролем системы контроля, как дополнительно описано в данном документе. В одном представленном в качестве примера варианте осуществления вертикальная рейка 526 может включать в себя линейную группу зубьев шестерни вдоль своей длины, а двигатель может поворачивать шестерню, которая взаимодействует с зубьями линейной шестерни, чтобы перемещать кормовой ведущий блок 516 вверх и вниз на вертикальной рейке 526.
Как показано на фиг. 9A–9D, кабель 502 может проходить под каждым из первого кормового базового блока 502 и второго кормового базового блока 522 и проходить поверх кормового ведущего блока 516. На нижнем или базовом конце вертикальной рейки 526 кормовой ведущий блок 516 может проходить между каждым из первого кормового базового блока 502 и второго кормового базового блока 522 к нижней точке их вертикального перемещения и отсоединяться от контакта с кабелем 502. После прохождения через кормовой кабельный буфер 508 кабель 502 с прикрепленными узлами 504 может быть развернут в толщу воды с помощью узла выхода за борт (не показан).
При запуске системы выбранная катушка 512 войдет в режим натяжения, а кабельный натяжитель 514 начнет вытягивание кабеля 502 из катушки 512 со скоростью, синхронизированной со скоростью судна. Кормовой буфер 508 будет накапливать максимальное количество длины кабеля, перемещаясь в его верхнее положение. При подаче сигнала для «присоединения узла» кормовой буфер 508 начнет стравливание из накопленной длины, тем самым сохраняя стабильную скорость кабеля, стравливаемого с судна. Одновременно с этим носовой буфер 506 начнет накапливать кабель, двигаясь к носу, и, таким образом, будет поддерживать постоянную скорость выхода кабеля с катушки 512. Вместе это будет удерживать кабель 502 неподвижным в устройстве 510 присоединения узла в течение достаточно длительного времени, чтобы прикрепить узел 504 к кабелю 502. Когда кормовой буфер 508 достигает своего полного нисходящего или «открытого» положения, носовой буфер 506 остановится, и кабель 502 с подключенным узлом 504 будет перемещаться в направлении узла выхода за борт. Как только система 500 обнаружит, что узел 504 прошел через зону кормового буфера 508, носовой буфер 506 переместится в свое кормовое положение, а кормовой буфер 508 начнет накапливать кабель с синхронизированной скоростью. Как только кормовой буфер 508 накопит максимальную длину кабеля 502, достигнув верхнего положения, система 500 готова для прикрепления другого узла 504.
Конфигурация и работа для развертывания кабеля 502 и прикрепления узлов 504, как в целом описано выше, более подробно показаны на фиг. 9A–9D. Носовой ведущий блок 516 стартует в кормовом положении вдоль горизонтальной рейки 518, а кормовой ведущий блок 524 стартует в верхнем положении на вертикальной рейке 526. Кабельный натяжитель 514 начинает вытягивание кабеля с постоянной скоростью. Тем самым кабель 502 разматывается с катушки 512 таким образом, что он движется линейно с постоянной скоростью V. В некоторых вариантах осуществления линейная скорость кабеля 502 может составлять до 5 узлов (2,5 м/с). Когда определено, что надлежащее расстояние разноса вдоль кабеля 502 между узлами 504 достигнуто, носовой ведущий блок 516 начинает двигаться к носу на носовой рейке 518 со скоростью по существу равной ½V, чтобы тем самым выбирать длину кабеля 502, разматываемого с катушки 512. Одновременно кормовой ведущий блок 524 начинает перемещаться вниз на вертикальной рейке 526 со скоростью по существу равной ½V, чтобы тем самым стравить кабель 502, ранее вытянутый вдоль вертикальной рейки 526, для выхода за борт со скоростью V. Так как носовой и кормовой ведущие блоки 516, 524 перемещаются в своих соответствующих направлениях на половине скорости кабеля 502 при его стравливании, то относительная скорость кабеля 502 по отношению к устройству 510 присоединения узла составляет 0V, то есть часть кабеля 502, проходящая через устройство 510 присоединения узла фактически не перемещается в этой системе отсчета.
Эффективно останавливая движение троса 502 через устройство 510 присоединения узла, узел 504 можно легко прикрепить к желаемому месту на кабеле 502 в течение времени, за которое он проходит через носовой и кормовой ведущие блоки 516, 524, чтобы пройти длины горизонтальной и вертикальной реек 518, 526 соответственно. Обычно время такого прохождения составляет порядка нескольких секунд в зависимости от длины реек 518, 526 и скорости кабеля 502, например, если скорость выхода за борт V составляет 5 узлов (2,5 м/с). Это достаточное время для устройства 510 присоединения узла, чтобы выбрать узел 504 из источника, сжать пружинный зажим, поместить открытый зажим вокруг кабеля 502 и освободить пружинный зажим на узле 504, чтобы завершить прикрепление узла к кабелю 502.
Как только узел 504 прикреплен к кабелю 502, носовой и кормовой ведущие блоки 516, 524 завершили свой проход горизонтальной и вертикальной реек 518, 526 соответственно. В этот момент кормовой ведущий блок 524 расположен ниже первого и второго кормовых базовых блоков 520, 522, как показано на фиг. 9С, и больше не соприкасается с кабелем 502. В то время как носовой и кормовой ведущие блоки 516, 524 неподвижны в носовом и нижнем положениях на горизонтальной и вертикальной рейках 518, 526 соответственно, кабель 502 продолжает тянуться кабельным натяжителем 514 и проходит через всю систему 500 на полной постоянной скорости развертывания V. Как показано, присоединенный узел 504 прикреплен так, чтобы проходить снизу кабеля 502. Таким образом, узел 504 не мешает ни одному из первого и второго кормовых базовых блоков 520, 522, ни узел 504 не мешает кормовому ведущему блоку 524, который расположен на достаточном расстоянии под траекторией кабеля 502 для образования расстояния узла 504 над верхней частью кормового ведущего блока 524. Также в это время новый узел 504’ может быть размещен внутри устройства 510 присоединения узла в положении для выбора и размещения нового узла 504’ на кабеле 502.
Как только узел 504 вышел за пределы второго кормового базового блока 522, носовой и кормовой ведущие блоки 516, 524 начинают перемещаться вдоль горизонтальной и вертикальной реек 518, 526 соответственно, как правило, со скоростью ½V, в их начальные положения на носовом и верхнем положениях на горизонтальной и вертикальной рейках 518, 526 соответственно, как показано на фиг. 9D. Кабель 502 поддерживает свою скорость выхода за борт V на корме морского судна, когда носовой и кормовой ведущие блоки 516, 524 движутся. Как только носовой и кормовой ведущие блоки 516, 524 достигают своих начальных положений, кабель 502 стравливается со скоростью V по его длине, пока система контроля для системы 500 развертывания сейсмических узлов не определит, что желаемое расстояние разноса между узлами 504 достигнуто, и цикл прикрепления начинается снова, как описано выше, начиная с фиг. 9А.
В течение всего цикла прикрепления узла, скорость V кабеля 502 разматываемого с катушки является такой же, как скорость V кабеля 502 при выходе за борт с кормы морского судна в толщу воды и эта скорость V остается постоянная на протяжении всего процесса развертывания кабеля.
На фиг. 10A–10C изображен процесс открепления узла, выполняемый системой 500 развертывания сейсмического узла. В начале извлечения кабеля 502 из сейсмической среды (например, водного массива) кормовой буфер 508 будет находиться в нижнем или «открытом» положении, кабельный натяжитель 514 будет наматывать кабель 502 с синхронизированной с судном скоростью. Катушка 512 будет находиться в режиме натяжения, вращаясь в противоположном направлении, чтобы наматывать трос 502. Датчики будут обнаруживать, когда узел 504 приближается к устройству 510 присоединения узла. Когда узел 504 достигает правильного положения в устройстве 510 присоединения узла, кормовой буфер 508 начнет накапливать кабель 502 с синхронизированной с судном скоростью, тем самым поддерживая устойчивую скорость выбора кабеля, выходящего из воды. Одновременно носовой буфер 506 начнет двигаться назад с той же скоростью, тем самым удерживая узел 504 в устойчивом положении в устройстве 510 присоединения узла достаточно долго, чтобы отсоединить узел 504 от кабеля 502. Когда узел 504 отключен, носовой буфер 506 будет двигаться к носу в направлении своего центрального положения, а кормовой буфер 508 будет двигаться в направлении своего нижнего или «открытого» положения. Как только кормовой буфер достигает «открытого» положения, система 500 готова к приему следующего узла 504.
Более подробно, как показано на фиг. 10A–10C, чтобы начать процесс извлечения троса, кормовой ведущий блок 524 располагают на вертикальной рейке 526 под первым и вторым кормовыми базовыми блоками 520, 522 (как показано на фиг. 10A) и больше не находится в контакте с кабелем 502. Носовой ведущий блок 516 дополнительно находится в полностью носовом положении на горизонтальной рейке 518. В то время как носовой и кормовой ведущие блоки 516, 524 неподвижны в носовом и нижнем положениях на горизонтальной и вертикальной рейках 518, 526 соответственно, кабель 502 может быть втянут или поднят на борт с помощью системы 500 на полной скорости развертывания V. Как показано на фиг. 10A, присоединенный узел 504 прикреплен так, что он проходит от нижней части кабеля 502. Таким образом, узел 504 не мешает ни одному из первого и второго кормовых базовых блоков 520, 522, ни узел 504 не мешает кормовому ведущему блоку 524, который расположен на достаточном расстоянии под траекторией кабеля 502 для образования расстояния узла 504 над верхней частью кормового ведущего блока 524.
Как только узел 504 на кабеле 502 достигает устройства 510 присоединения узла, система контроля заставляет носовой и кормовой ведущие блоки 516, 524 начать движение вдоль горизонтальной и вертикальной реек 518, 526 соответственно, как правило, со скоростью ½V, чтобы остановить узел 504 в устройстве 510 присоединения узла. Даже несмотря на то, что участок кабеля перед устройством 510 присоединения узла является неподвижным относительно устройства 510 присоединения узла, кабель 502 поддерживает скорость подъема на борт V на корме морского судна и аналогично скорость намотки V при движении носового и кормового ведущих блока 516, 524.
Эффективно останавливая движение кабеля 502 через устройство 510 присоединения узла, узел 504 можно легко открепить от кабеля 502, как указано на фиг. 10В, в течение времени, за которое он проходит через носовой и кормовой ведущие блоки 516, 524, чтобы пересечь длины горизонтальной и вертикальной реек 518, 526 соответственно. Обычно время такого прохождения составляет порядка нескольких секунд, если скорость выхода за борт V составляет 5 узлов (2,5 м/с). Это является достаточным временем для устройства 510 присоединения узла, чтобы захватить узел 504 на кабеле 502, сжать пружинный зажим, удалить открытый зажим со стороны кабеля 502, освободить пружинный зажим на узле 504 и разместить узел 504 подальше от кабеля 502 для хранения, зарядки, загрузки данных, очистки и т. д.
Как только узел 504 был удален с кабеля 502, носовой ведущий блок 516 начинает двигаться к носу из кормового положения вдоль горизонтальной рейки 518 и создает буферную длину кабеля 502 для непрерывной постоянной скорости выбора с помощью катушки 512. Кормовой ведущий блок 524 начинает одновременно перемещаться вниз из верхнего положения на вертикальной рейке 526, чтобы освободить свою буферную длину кабеля 502, который, таким образом, передается в носовую буферную систему 506. При этом перемещении носовой и кормовой ведущие блоки 516, 524 в конечном итоге возвращаются в свои исходные положения для открепления узла во время извлечения кабеля 502, так что следующий узел может проходить через кормовой ведущий блок 524, чтобы быть расположенным в устройстве 510 присоединения узла, в этот момент цикл повторяется. Во время извлечения кабель 502 наматывается на катушку 512 с постоянной скоростью V, которая является такой же, как скорость выбора кабеля 502 из толщи воды.
Представленный в качестве примера вариант воплощения системы 600 развертывания сейсмического узла в соответствии со схемами на фиг. 9А–10С изображен на задней палубе 644 морского судна на фиг. 11А–11В. Система 600 выполнена с возможностью прикрепления и открепления множества сейсмических приемных узлов 604 на и от кабеля 602 для развертывания с и возврата на морское судно. Система 600 может включать в себя носовую буферную систему 606 и кормовую буферную систему 608 для контролирования относительной скорости кабеля 602 относительно устройства 610 присоединения узла. Несколько кабелей 602 может храниться на нескольких катушках 612, с которых кабели 602 стравливаются для развертывания в толще воды или наматываются для хранения, когда они не используются. Кабельный натяжитель 614 может быть расположен между носовой буферной системой 606 и кормовой буферной системой 608, чтобы поддерживать надлежащее натяжение в кабеле 602, когда он стравливается или выбирается. Узловое соединительное устройство 610 может быть расположено между кабельным натяжителем 614 и кормовой буферной системой 608.
Поскольку кабель 602 разматывается с хранения на одной из катушек 612, он может проходить вокруг блока на катушечном устройстве 632, что способствует разматыванию и намотке кабеля 602 на катушках 612. Катушка 612 обычно приводится в действие двигателем и функционирует как лебедка, когда она как наматывает, так и разматывает кабель 602 с катушки 612 из–за значительной массы кабеля 602 и соответствующего момента, возникающего при вращении катушки 612. Блок на катушечном устройстве 632 перемещается в горизонтальном направлении на стержне для отслеживания положения кабеля 502, когда он разматывается или наматывается вокруг катушки 612. Блок на катушечном устройстве 632 направляет кабель 602 между катушками 612 в носовую буферную систему 606, где находится кабель 602, и продевается вокруг носового ведущего блока 616. Ряд дополнительных зафиксированных носовых направляющих блоков 634 может дополнительно использоваться для направления троса 602 вдоль носовой буферной системы 606 к носовому ведущему блоку 616. В одном представленном в качестве примера варианте осуществления горизонтальная рейка 618 может включать в себя линейную группу зубьев шестерни вдоль своей длины, а двигатель может поворачивать шестерню, которая взаимодействует с зубьями линейной шестерни, чтобы перемещать носовой ведущий блок 616 назад и вперед на горизонтальной рейке 618.
После намотки вокруг носового ведущего блока 616 кабель 502 затем пропускается через кабельный натяжитель 614. Кабельный натяжитель 614 может состоять из одного или большего количества блоков, вокруг которых продевается кабель 602, и которые выполнены с возможностью обеспечения соответствующего натяжения кабеля 602 при развертывании и извлечении кабеля 502 из толщи воды. Блоки могут включать в себя приводимый двигателем натяжной приводной блок 640 и несколько натяжных направляющих блоков 642. Натяжной приводной блок 640 может иметь зубчатую коробку скоростей, чтобы защитить носовой ведущий блок 616 и катушку 612 от чрезмерного усилия, которое может быть приложено к кабелю 602 толщей воды.
Кабель 602 затем проходит через устройство 610 присоединения узла, которое выполнено с возможностью прикрепления множества датчиковых узлов 604 последовательно на кабель 602, обычно при фиксированном интервале расстояний (и дополнительно отсоединить узлы 604 от кабеля 602 при противоположной работе). Узлы 604 могут транспортироваться к устройству 610 присоединения узла из площадок хранения на морском судне посредством конвейерной системы 636. В некоторых вариантах реализации узлы 604 могут быть спроектированы с возможностью разделения на два отдельных компонента, например, компонент батареи/памяти и компонент датчика/тактового генератора, которые открепляются друг от друга для хранения и обслуживания. При использовании такой конфигурации компонентов узла система 600 может включать в себя станции 638 штифтования и расштифтовывания, смежные с устройством 610 соединения узлов, для соединения компонентов узла вместе перед прикреплением узлов 604 к кабелю 602 или для разделения компонентов узла после удаления узлов 604 с кабеля 602. В одном представленном в качестве примера варианте реализации узел 604 может быть оснащен подпружиненным соединителем, который зажимает узел 504 на кабеле 502. Устройство 510 присоединения узла может быть выполнено с возможностью выбора узла 504 из предоставленного источника узлов 604, сжатия пружинного зажима, размещения пружинного зажима вокруг кабеля 602 и освобождения пружинного зажима для соединения узла с кабелем 602.
После прохождения через устройство 610 присоединения узла кабель 602 может быть продет через несколько блоков, образующих кормовой кабельный буфер 608. Первый кормовой базовый блок 620 и второй кормовой базовый блок 622 могут быть расположены в зафиксированных позициях на боковых сторонах основания вертикальной рейки 626, вдоль которых движется кормовой ведущий блок 624. Кормовой ведущий блок 624 может приводиться в движение вертикально вдоль вертикальной рейки 626 с помощью двигателя, который находится под контролем системы контроля 650. В одном представленном в качестве примера варианте осуществления вертикальная рейка 626 может включать в себя линейную группу зубьев шестерни вдоль своей длины, а двигатель может поворачивать шестерню, которая взаимодействует с зубьями линейной шестерни, чтобы перемещать кормовой ведущий блок 616 вверх и вниз на вертикальной рейке 626. Система контроля 650 может дополнительно контролировать носовую буферную систему 606, катушки 512, кабельный натяжитель 614, устройство 610 присоединения узла и другие компоненты системы 600, чтобы синхронизировать компоненты и балансировать силами и нагрузками в системе 600.
Другие компоненты системы 600, смонтированные на задней палубе 644, могут включать в себя блок 628 выхода за борт, блок 648 моечной машины высокого давления и палубный кран 646. Блок 628 выхода за борт может включать в себя дополнительные направляющие блоки и обеспечивать прочный структурный каркас для направления кабеля 602 через корму морского судна и в толщу воды. Блок 648 моечной машины высокого давления может использоваться для очистки от соленой воды, грязи и мусора узлов 604 и других компонентов, чтобы поддерживать и продлевать срок службы таких компонентов. Палубный кран 646 может использоваться для перемещения, сборки или разборки любого из компонентов системы 600 на задней палубе 644.
Как указано в представленном в качестве примера варианте исполнения, изображенного на фиг. 11А и 11В, система контроля обычно используется для приведения в действие и синхронизации различных компонентов системы развертывания сейсмического узла. Блок–схема последовательности операций с представленными в качестве примера операциями 700 развертывания узла, предпринимаемыми системой контроля для координации такой системы развертывания сейсмического узла, представлена на фиг. 12. Первоначально следует отметить, что кабель должен быть проложен с хранения на катушке через носовую буферную систему, систему натяжения, устройство присоединения узла и кормовую буферную систему, как указано в состоянии 702 начальной конфигурации. Как только кабель будет установлен в системе развертывания, система контроля будет приводить в действие двигатель на катушке для стравливания кабеля с постоянной скоростью, как указано в операции 704. В сочетании, а в некоторых случаях одновременно, система управления будет приводить в действие электродвигатель приводного блока в кабельном натяжителе, чтобы создать соответствующее натяжение кабеля внутри системы, как указано в операции 706. После приведения в действие катушки и кабельного натяжителя система контроля постоянно отслеживает и регулирует мощность для осуществления переключения передач в коробках скоростей двигателя катушки и двигателя кабельного натяжителя, чтобы поддерживать надлежащее натяжение кабеля и противостоять постоянно меняющимся усилиям кабеля, например, усилиям от момента массы кабеля при вращении катушки и усилий от трения толщи воды на длине кабеля, уже развернутой с морского судна.
Система контроля дополнительно отслеживает длину кабеля стравленного с катушки, как указано в операции 708 для того, чтобы идентифицировать местоположения для размещения узла вдоль кабеля. Как правило, узлы будут находиться и прикрепляться на равных отделяющих расстояниях вдоль кабеля. Тем не менее, система контроля может быть запрограммирована на прикрепление узлов к кабелю на неодинаковых отделяющих расстояниях, как это необходимо для удовлетворения любых конкретных требований к сейсмической записи. Когда определено, что место для осуществления прикрепления узла совпадает с устройством присоединения узла, система контроля приводит в действие двигатели, которые перемещают носовой и кормовой ведущие блоки на рейках. Носовой ведущий блок перемещается к носу, а кормовой ведущий блок одновременно перемещается вниз по существу на половине скорости, с которой кабель стравливается с катушки. При перемещении носового и кормового ведущих блоков таким образом, чтобы выбрать длину кабеля на носовом конце и стравить накопленную длину на кормовом конце, сегмент кабеля, расположенный в устройстве присоединения узла, является по существу неподвижным или перемещается с существенно уменьшенной скоростью по отношению к устройству присоединения узла за период, когда носовой и кормовой ведущие блоки проходят рейки.
В течение периода, когда кабель является стационарным по отношению к устройству присоединения узла, система контроля заставляет устройство соединения узла прикреплять узел к кабелю, как указано в операции 712. Система контроля может контролировать время, доступное для прикрепления узлов, порядка нескольких секунд в зависимости от длины реек и скорости кабеля. Это является достаточным временем для устройства присоединения узла, чтобы выбрать узел из источника, сжать пружинный зажим, поместить открытый зажим вокруг кабеля и освободить пружинный зажим на узле, чтобы завершить прикрепление узла к кабелю. В некоторых вариантах реализации, например, как показано на фиг. 11A и 11B, система контроля может дополнительно контролировать и координировать конвейерную систему, чтобы доставлять узлы в устройство присоединения узла и позиционировать их для выбора устройством присоединения узла.
Система контроля дополнительно отслеживает положение кормового ведущего блока на вертикальной рейке, чтобы определить, когда его положение находится под кормовыми базовыми блоками и высвободить кабель и прикрепленный узел, как указано в операции 714. Как только кормовой ведущий блок достигает этого нижнего положения, система контроля останавливает его движение, и кабель движется с постоянной скоростью по всей системе развертывания, чтобы пройти через кормовую буферную систему с прикрепленным узлом и продолжить движение к узлу выхода за борт для развертывания в толщу воды, как указано в операции 716. Как уже отмечалось, скорость кабеля, проходящего через систему развертывания, является постоянной по отношению ко всем компонентам системы в этой точке (то есть скорость кабеля, выходящего из катушки, равна скорости кабеля по отношению к устройству присоединения узла, которая равна скорости кабеля, входящего в толщу воды).
После того, как узел, прикрепленный к кабелю, покидает кормовую буферную систему, система контроля приводит в действие двигатель на носовом ведущем блоке, чтобы переместить его назад, и двигатель на кормовом ведущем блоке, чтобы переместить его вверх, как указано в операции 718. Таким образом, носовой и кормовой ведущие блоки возвращаются в свои начальные положения на рейках, чтобы подготовить систему развертывания к прикреплению следующего узла.
На фиг. 13 изображена блок–схема последовательности операций, демонстрирующая представленные в качестве примера операции 800 извлечения, предпринимаемые системой контроля для координации такого извлечения системы развертывания сейсмического узла из толщи воды. Как и при развертывании, для начала операции извлечения кабель должен быть прикреплен к катушке и продет через носовую буферную систему, систему натяжения, устройство присоединения узла и кормовую буферную систему, как указано в состоянии 802 начальной конфигурации.
Затем система контроля определяет, находятся ли носовой и кормовой ведущие блоки в надлежащих начальных положениях для извлечения и удаления узла, которые расположены к носу и вниз, соответственно, как указано в операции 804. Если носовой и кормовой ведущие блоки находятся в неправильных положениях, система контроля приводит в действие двигатели, которые перемещают носовой и кормовой ведущие блоки на рейках в правильные положения.
После того как кабель установлен в системе развертывания, а носовой и кормовой ведущие блоки находятся в надлежащих начальных положениях, система контроля будет приводить в действие двигатель на катушке, чтобы наматывать кабель с постоянной скоростью, как указано в операции 806. В сочетании, а в некоторых случаях одновременно, система управления будет приводить в действие электродвигатель приводного блока в кабельном натяжителе, чтобы создать соответствующее натяжение кабеля внутри системы, как дополнительно указано в операции 806. После приведения в действие катушки и кабельного натяжителя система контроля постоянно отслеживает и регулирует мощность для осуществления переключение передач в коробках скоростей двигателя катушки и двигателя кабельного натяжителя, чтобы поддерживать надлежащее натяжение кабеля и противостоять постоянно меняющимся усилиям на кабеле, например, усилиям от момента массы кабеля при вращении катушки и получения большей массы кабеля и усилий от трения толщи воды на изменяющейся длине кабеля, которая находится в толще воды.
Система контроля дополнительно поддерживает постоянную скорость катушки для втягивания кабеля из толщи воды с одинаковой постоянной скоростью, как указано в операции 808. Система контроля может дополнительно координировать скорость вращения приводного блока в системе натяжителя, чтобы протягивать кабель через систему натяжителя со скоростью такой же, как происходит наматывание на катушку. Пока кабель наматывается, система контроля дополнительно отслеживает длину кабеля, извлеченного из толщи воды, как указано в операции 708, чтобы идентифицировать местоположения узлов для позиционирования внутри устройства присоединения узла для удаления узла с кабеля. Как правило, узлы будут находиться и прикрепляться на равных отделяющих расстояниях вдоль кабеля. Тем не менее, узлы могут быть прикреплены к кабелю на неодинаковых отделяющих расстояниях, как это необходимо для удовлетворения любых конкретных требований к сейсмической записи. В дополнение или в качестве альтернативы для отслеживания длины кабеля, система контроля может просто отслеживать наличие и местоположение узла, когда он проходит через компоненты системы развертывания на задней палубе.
Система контроля, в частности, определяет, когда узел прошел через кормовую буферную систему и находится в одну линию с устройством присоединения узла, как указано в операции 812. В этот момент носовой ведущий блок перемещается к корме, а кормовой ведущий блок перемещается вверх одновременно по существу на половину скорости намотки кабеля на катушку, как указано в операции 814. При перемещении носового и кормового ведущих блоков таким образом, чтобы выбрать длину кабеля на кормовом конце и стравить накопленную длину на носовом конце, сегмент кабеля с прикрепленным узлом, расположенный в устройстве присоединения узла, является по существу неподвижным или перемещается с существенно уменьшенной скоростью по отношению к устройству присоединения узла за период, когда носовой и кормовой ведущие блоки проходят рейки.
Эффективно останавливая движение кабеля через устройство присоединения узла, узел можно легко открепить от кабеля как указано в операции 816 в течение времени, за которое он проходит через носовой и кормовой ведущие блоки, чтобы пересечь длины горизонтальной и вертикальной реек соответственно. Обычно время такого прохождения составляет порядка нескольких секунд. Это является достаточным временем для устройства присоединения узла, чтобы захватить узел на кабеле, сжать пружинный зажим, удалить открытый зажим со стороны кабеля, освободить пружинный зажим на узле и разместить узел для хранения или технического обслуживания и ремонта. Как только носовой и кормовой ведущие блоки достигают своих конечных кормового и верхнего положений соответственно, система контроля возвращает их в начальное положение, чтобы дождаться следующего узла, в то время как кабель продолжает втягиваться из толщи воды и накапливаться на катушке при постоянной скорости.
Примеры
Подходящие варианты реализации системы и устройства охватывают системы развертывания сейсмических узлов, содержащие источник кабеля, выполненный с возможностью обеспечения кабеля, и один или большее количество сейсмических узлов, выполненных с возможностью присоединения к кабелю в месте для осуществления прикрепления для развертывания в толще воды. Система прикрепления узла может быть выполнена таким образом, чтобы приводить часть кабеля в возвратно–поступательное движение, например, между источником кабеля и толщей воды, когда скорость кабеля существенно снижается вблизи места для осуществления прикрепления относительно скорости выхода за борт, при которой кабель стравливается в толщу воды для развертывания сейсмических узлов.
Сейсмическое судно может иметь множество таких систем развертывания сейсмических узлов, каждая из которых расположена на задней палубе, как правило, параллельно и в продольном направлении. Сейсмическая группа может включать в себя множество сейсмических кабелей, соединенных с такими системами развертывания сейсмических узлов и тем самым развертываемые в толще воды.
Подходящие варианты реализации способа и процесса включают в себя обеспечение кабеля, стравливание конца кабеля в толщу воды и приведение участка кабеля в возвратно–поступательное движение относительно конца, который стравливается. Скорость участка кабеля, совершающего возвратно–поступательное движение, может быть уменьшена относительно скорости выхода за борт, при которой кабель стравливается, и один или большее количество сейсмических узлов могут быть присоединены или прикреплены к участку кабеля с уменьшенной скоростью для развертывания в толще воды вдоль кабеля.
В любом из приведенных выше примеров и вариантов реализации скорость для осуществления прикрепления может быть уменьшена до по существу нуля в течение короткого периода времени (например, от долей секунды до нескольких секунд в зависимости от ситуации) в течение каждого периода возвратно–поступательного движения, когда скорость для осуществления прикрепления кабеля определяется относительно устройства прикрепления/открепления сейсмического узла или площадки задней палубы. В некоторых вариантах реализации скорость для осуществления прикрепления может быть уменьшена в течение по меньшей мере пяти секунд в течение каждого периода возвратно–поступательного движения относительно скорости выхода за борт. Аналогично, скорость для осуществления прикрепления может быть уменьшена в течение по меньшей мере 25% от периода возвратно–поступательного движения относительно скорости выхода за борт или относительно скорости, с которой подается кабель. В качестве альтернативы можно контролировать скорость подачи кабеля, чтобы регулировать натяжение в участке кабеля, к которому прикрепляются узлы.
В любом из вышеприведенных примеров и вариантов реализации участок кабеля, совершающий возвратно–поступательное движение, может зацепляться по меньшей мере с одним компонентом блока прикрепленными на каретке, совершающей возвратно–поступательное движение, тем самым приводя участок кабеля в возвратно–поступательное движение. Например, участок кабеля может выполнять один проход между двумя такими компонентами блока, прикрепленными на противоположных концах к каретке, совершающей возвратно–поступательное движение, или по меньшей мере два прохода между такими компонентами блока, прикрепленными к каретке, совершающей возвратно–поступательное движение. Участок кабеля также может быть зацеплен по меньшей мере с одним неподвижным компонентом блока, например, с блоком, прикрепленным к приспособлению для задней палубы, которое является неподвижным относительно каретки, совершающей возвратно–поступательное движение.
В зависимости от конфигурации блока максимальная скорость возвратно–поступательного движения каретки может составлять примерно половину или меньше скорости выхода за борт, при которой кабель стравливается, а сейсмические узлы развертываются в воду. Например, максимальная скорость возвратно–поступательного движения может составлять долю равную 1/n или меньше скорости выхода за борт, при которой сейсмические узлы развертываются на кабеле, где n находится в диапазоне от двух до восьми включительно. В качестве альтернативы n может быть больше восьми.
Возвратно–поступательное движение может быть ориентировано по существу поперечно к траектории кабеля, определенной между обеспечением кабеля (например, на лебедочной или катушечной системе) и стравливанием конца кабеля в толщу воды (например, на шкиве на кормовом конце задней палубы). В качестве альтернативы, возвратно–поступательное движение может быть ориентировано по существу вдоль траектории кабеля, аналогично определенной между обеспечением кабеля и стравливанием конца кабеля в толщу воды.
Множество сейсмических узлов также может быть присоединено к различным участкам кабеля пока осуществляется стравливание в толщу воды, например, с целью развертывания сейсмической косы или узловой линии с узлами, расположенными вдоль кабеля в выбранных местах. Узлы также могут быть прикреплены к различным кабелям, например, для развертывания многокабельной сейсмической группы с узлами расположенными в выбранных положениях вдоль каждого из кабелей.
Все ориентиры направления (например, проксимальный, дистальный, верхний, нижний, вверх, вниз, влево, вправо, боковой, продольный, передний, задний, верхний, нижний, верхний, нижний, вертикальный, горизонтальный, радиальный, осевой, по часовой стрелке и против часовой стрелки) используются только в целях идентификации, чтобы помочь читателю понять конструкции, раскрытые в данном документе, и не создают ограничений, особенно в отношении положения, ориентации или использования таких конструкций. Ссылки на соединения (например, прикрепленные, присоединенные, подключенные и состыкованные) должны толковаться широко и могут включать промежуточные элементы между совокупностью элементов и относительным перемещением между элементами, если не указано иное. Таким образом, ссылки на соединения не обязательно подразумевают, что два элемента напрямую связаны и находятся в зафиксированном отношении друг к другу. Представленные в качестве примера графические материалы приведены только в целях иллюстрации, а размеры, положения, порядок и относительные размеры, отраженные на прилагаемых графических материалах, могут варьироваться.
Хотя это раскрытие сделано со ссылкой на представленные в качестве примера варианты реализации, специалистам в данной области техники будет понятно, что могут быть сделаны различные изменения и могут быть заменены эквиваленты, чтобы адаптировать эти идеи к различным техническим проблемам, материалам и решениям, оставаясь при этом в пределах сущности и объема изобретения. Таким образом, изобретение не ограничивается конкретными раскрытыми примерами, а вместо этого охватывает все варианты реализации, попадающие в объем прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2016 |
|
RU2621272C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2004 |
|
RU2416810C2 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| КАЧЕХОД И КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2392177C1 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| МОРСКАЯ ДОННАЯ СИСТЕМА | 2015 |
|
RU2696373C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ БУКСИРУЕМЫХ КОМПОНЕНТОВ, НАХОДЯЩИХСЯ НИЖЕ ПОВЕРХНОСТИ ВОДЫ | 2015 |
|
RU2672044C2 |
| МНОГОКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР С ОДНОЙ МАССОЙ | 2016 |
|
RU2733974C2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ В РАЗБРЫЗГИВАТЕЛЬ ЖИДКОГО ПОКРЫВАЮЩЕГО ПРОДУКТА | 2014 |
|
RU2678152C2 |
| УБИРАЮЩАЯСЯ КОМПЬЮТЕРНАЯ РАБОЧАЯ СТАНЦИЯ | 2014 |
|
RU2675123C2 |
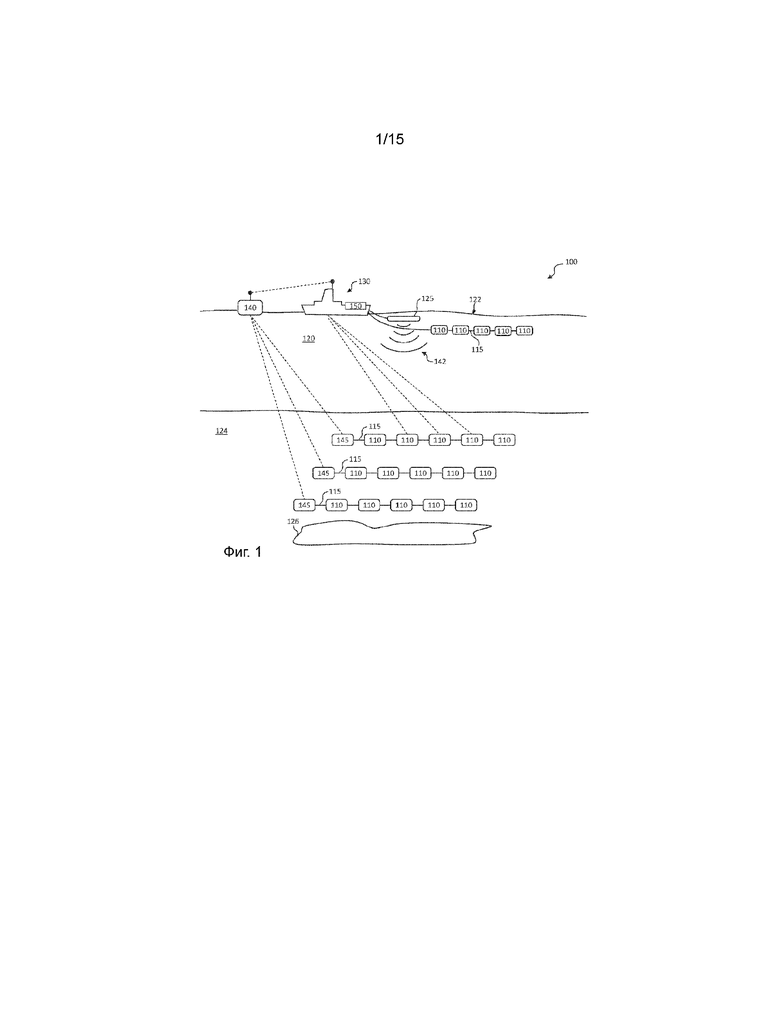
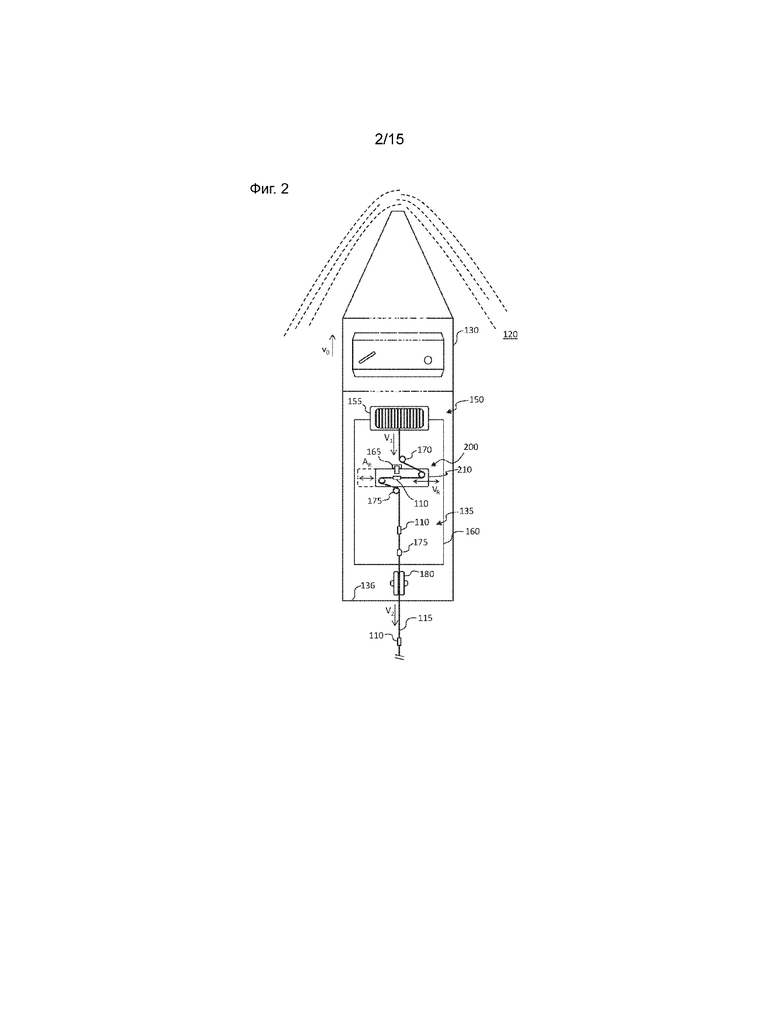
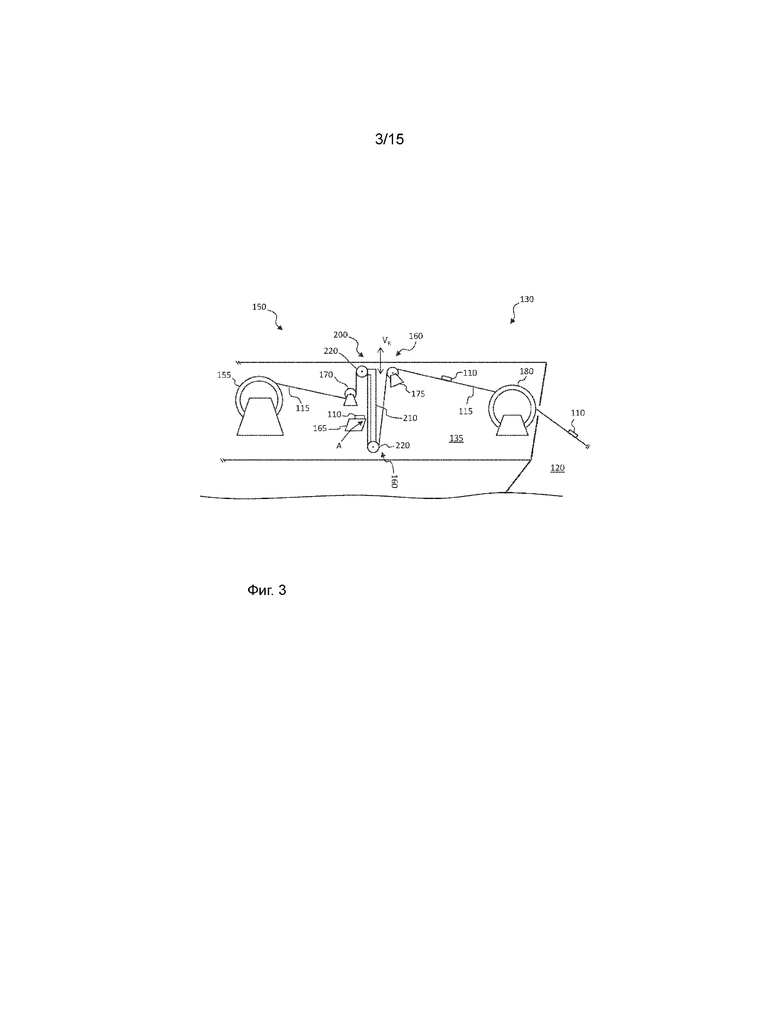
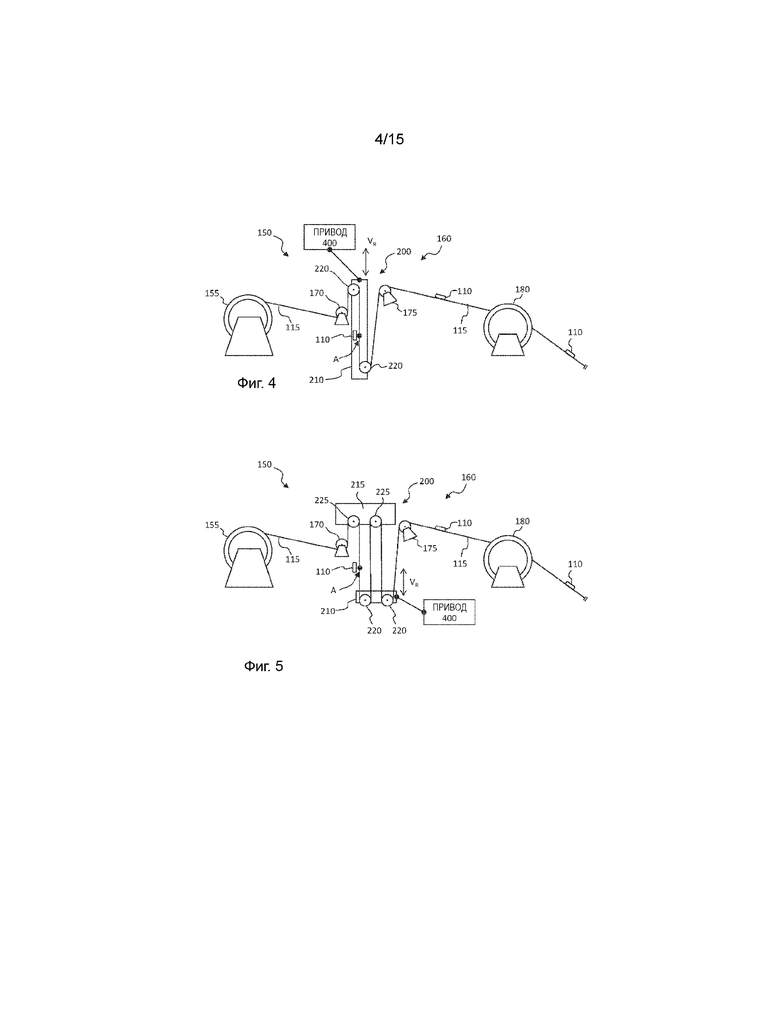
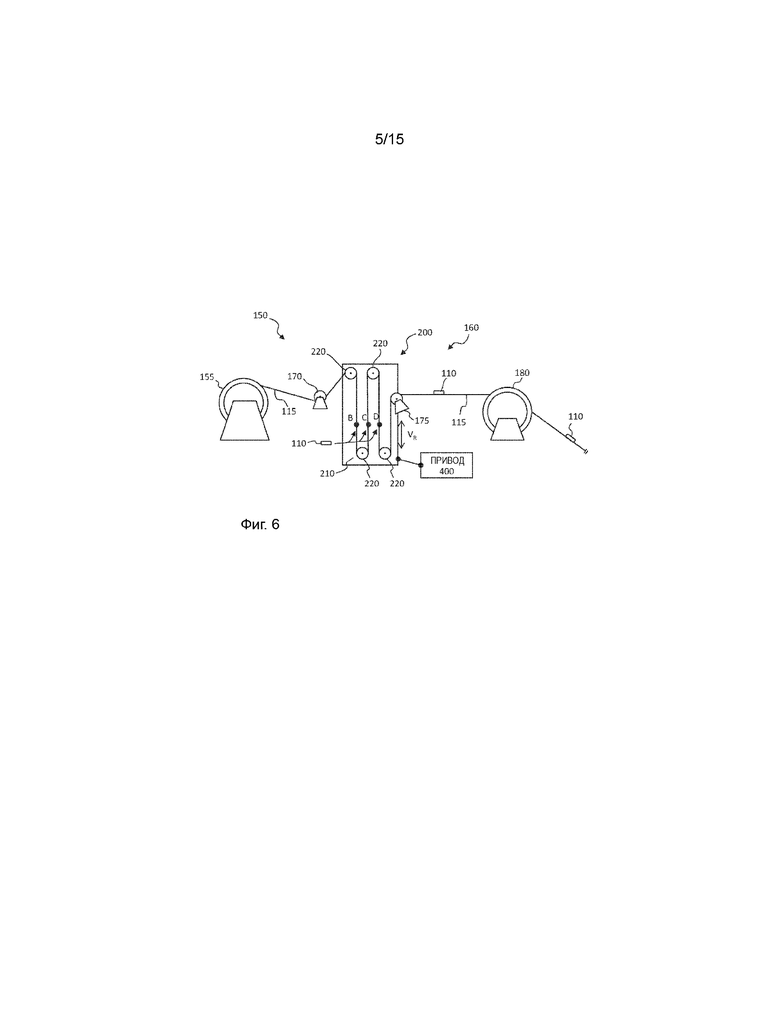
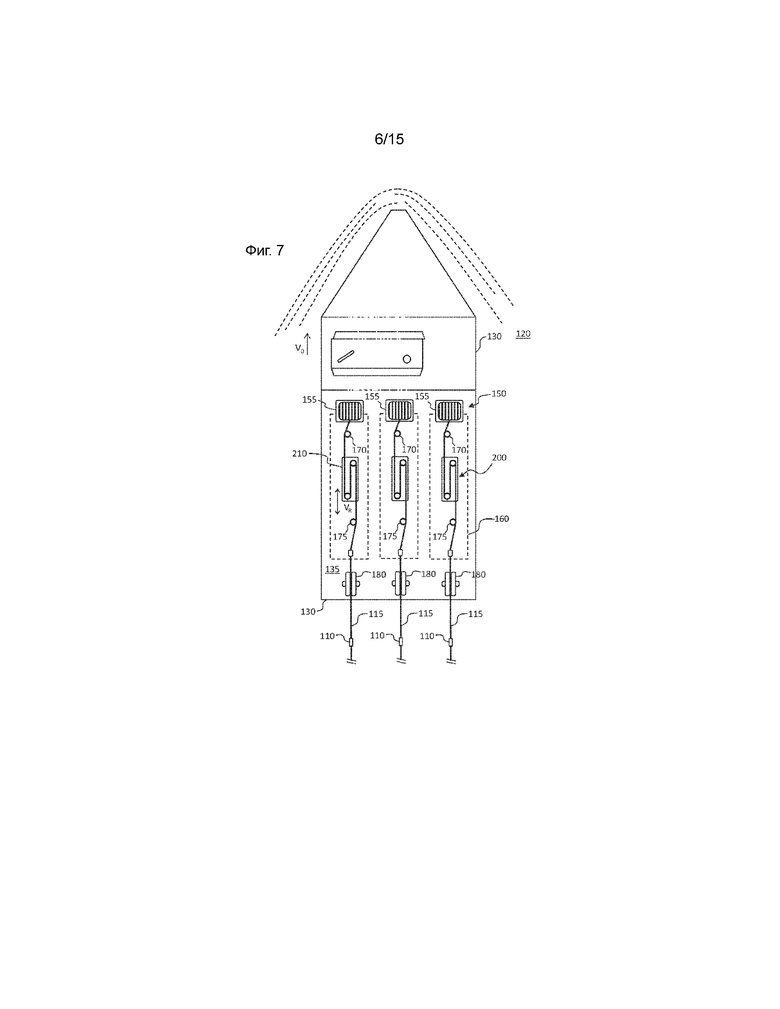
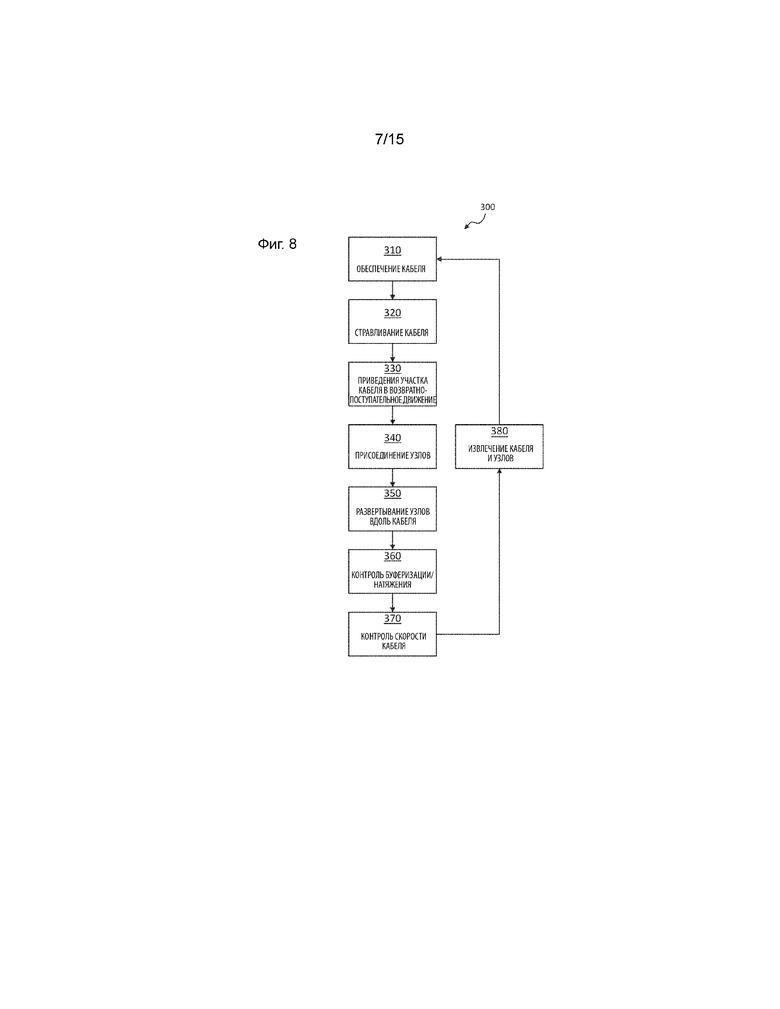
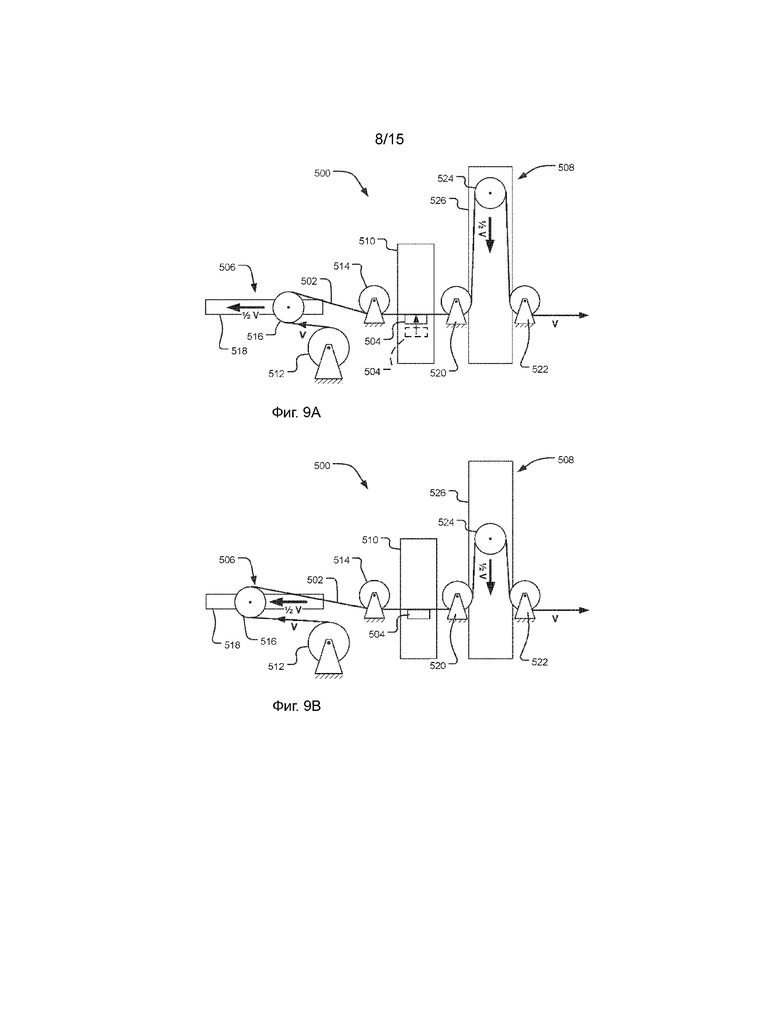
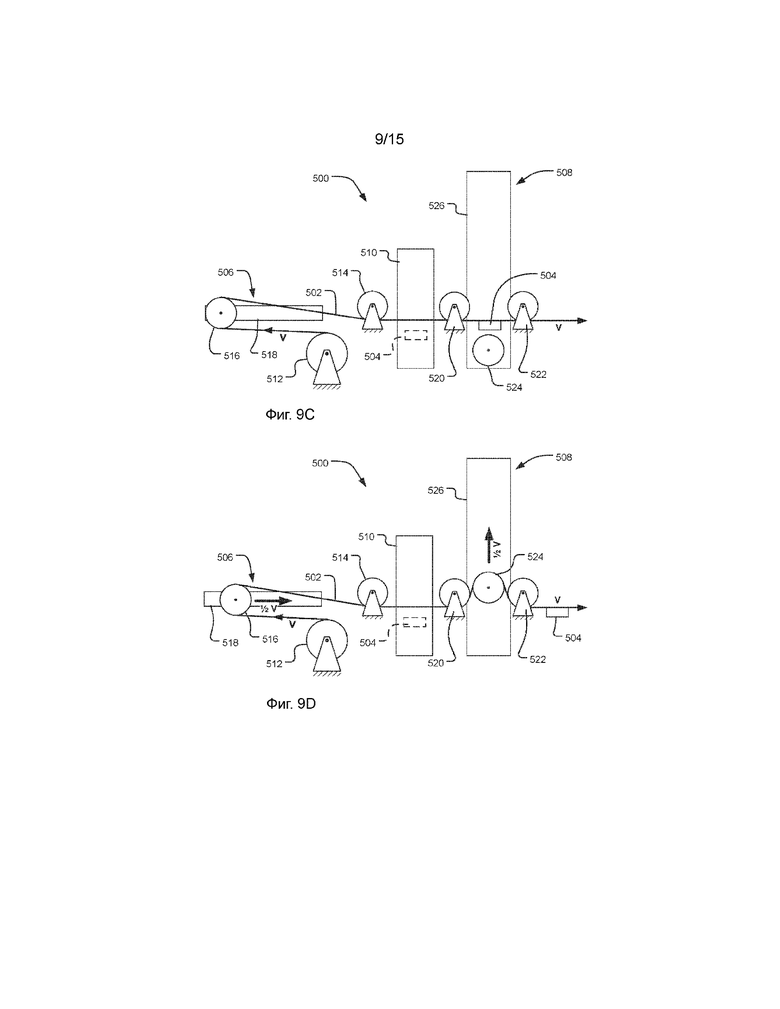
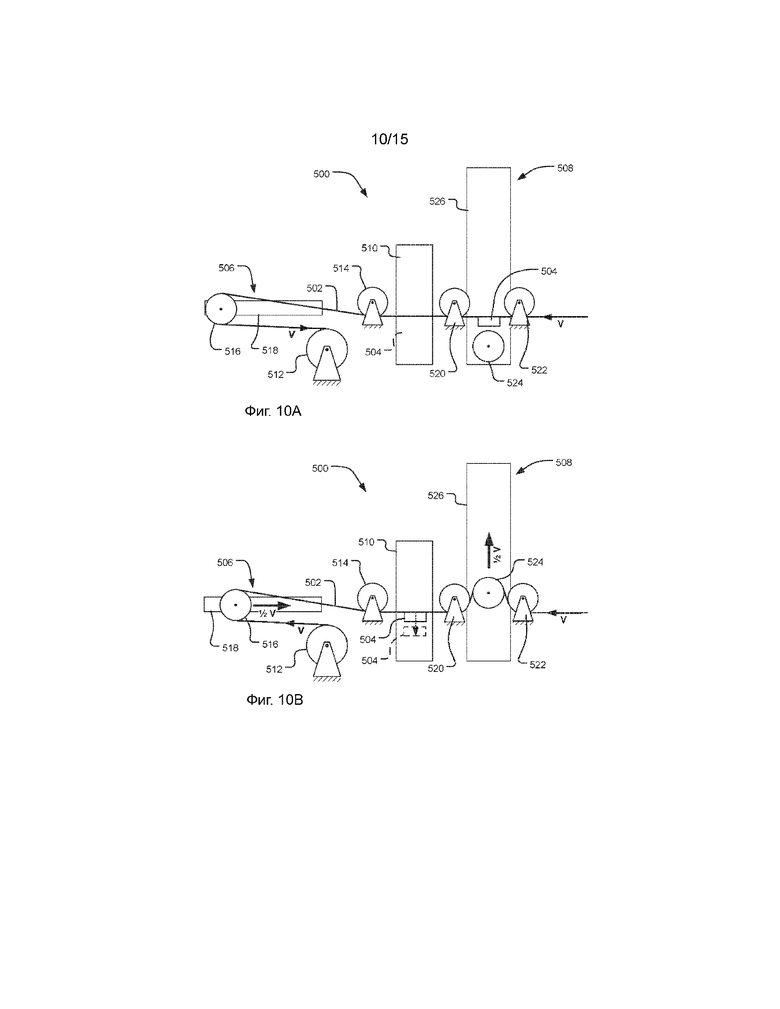
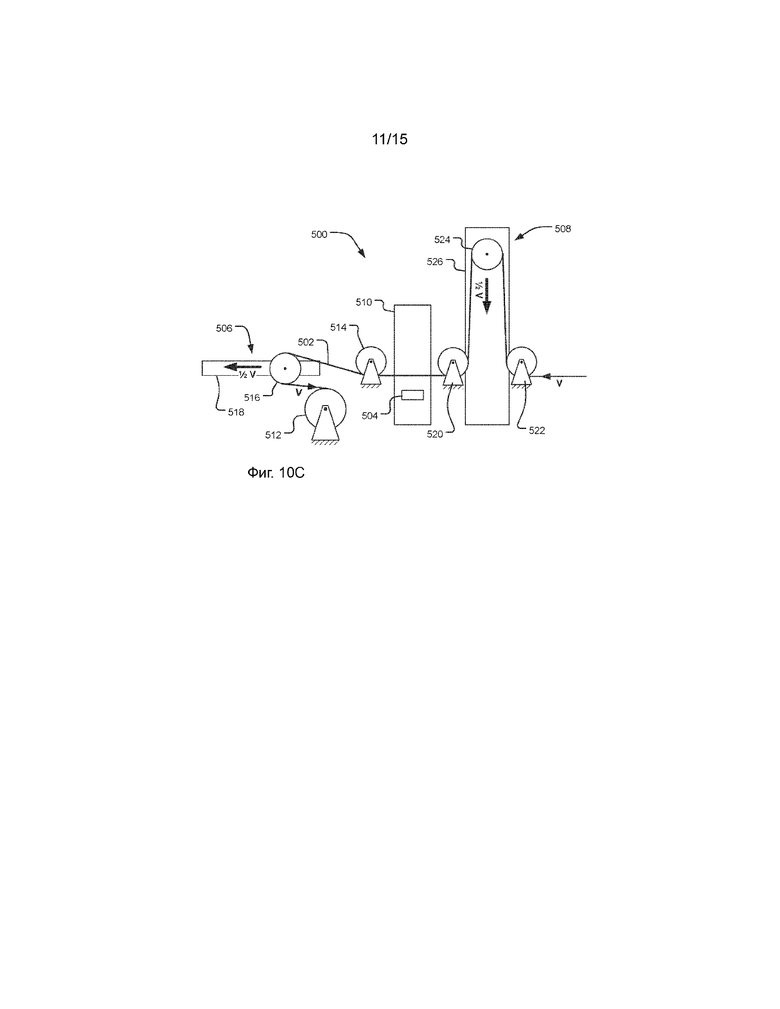
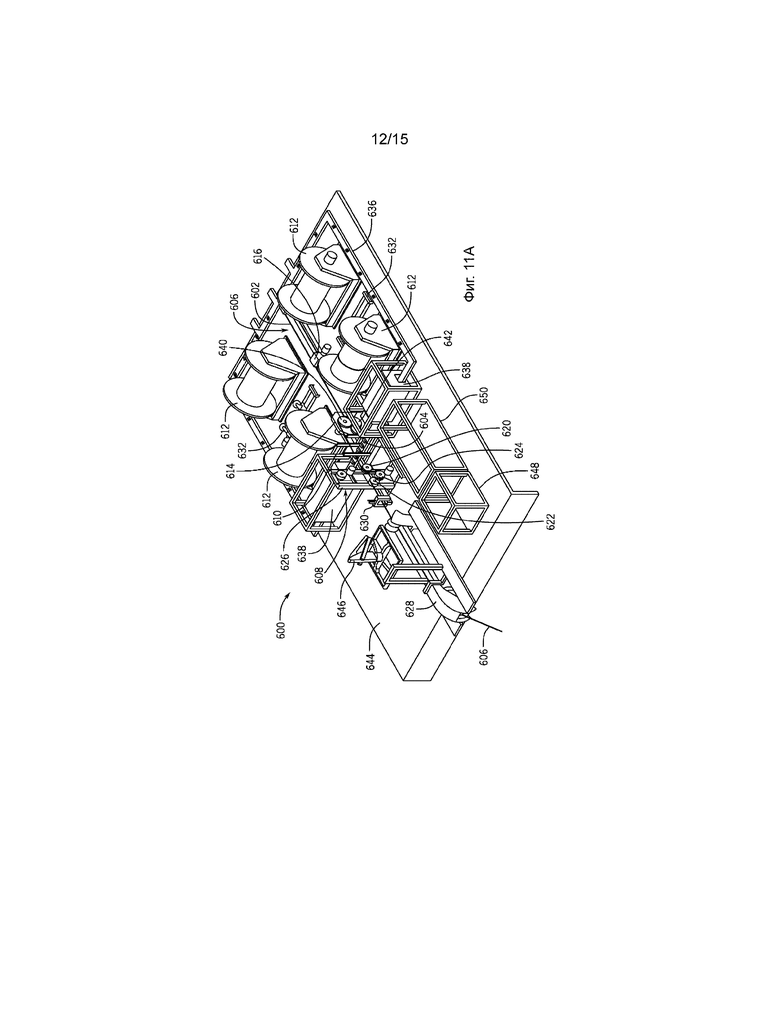
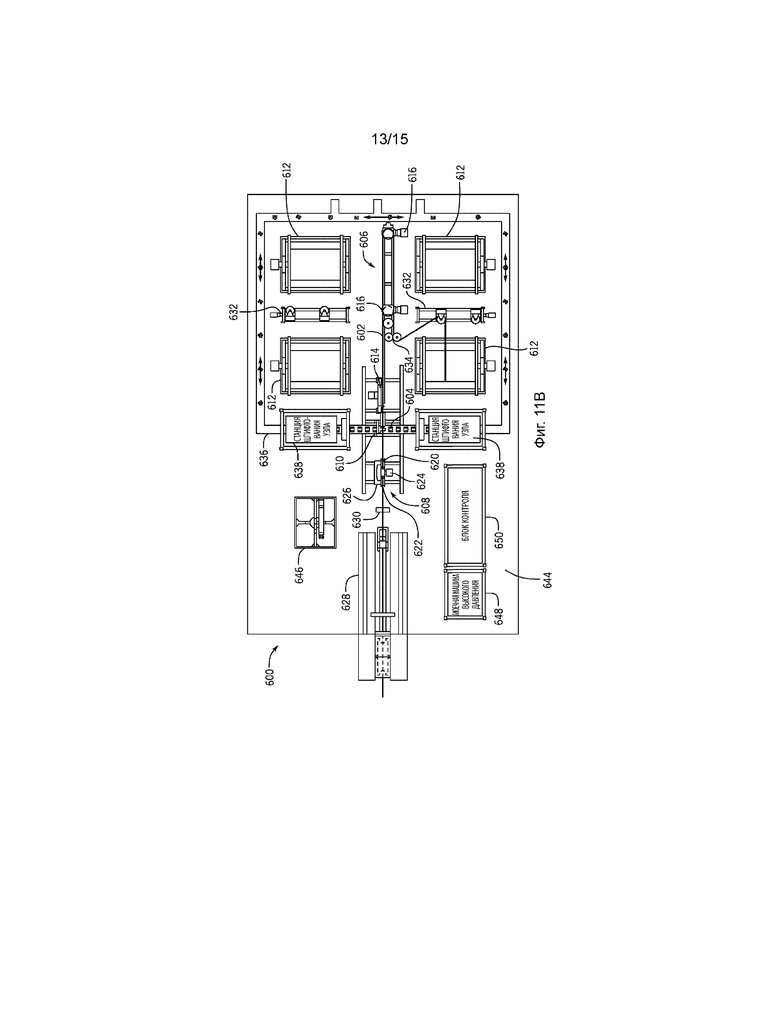
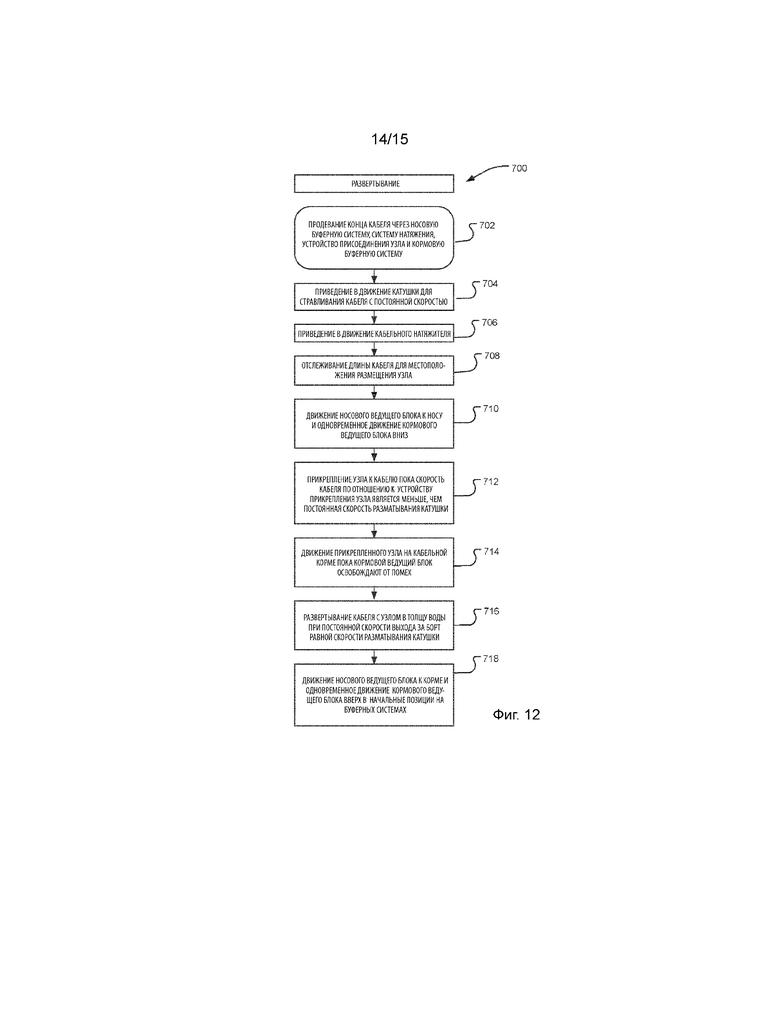
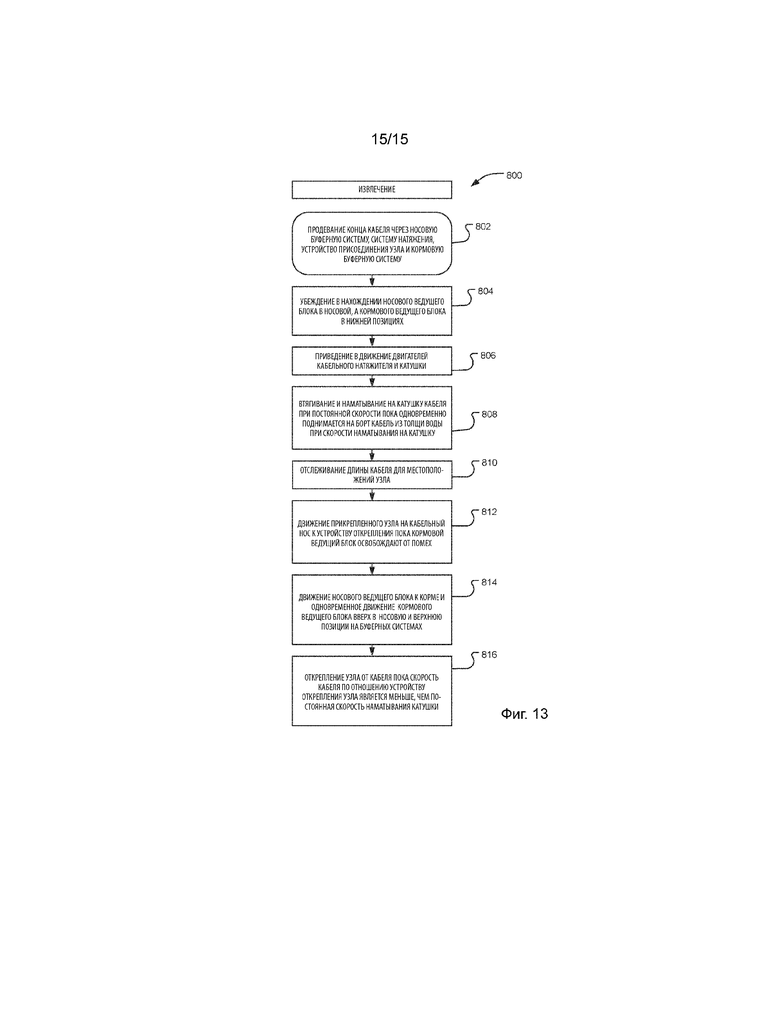
Изобретение относится к области геофизики и может быть использовано при проведении морских сейсморазведочных работ. Заявлена система развертывания сейсмического узла, которая содержит источник кабеля с одним или большим количеством сейсмических узлов, выполненных с возможностью присоединения к кабелю в одном или большем количестве мест для осуществления прикрепления для развертывания в толще воды. Система прикрепления узла выполнена таким образом, чтобы приводить часть кабеля в периодическое или возвратно-поступательное движение, так что скорость для осуществления прикрепления существенно уменьшается относительно скорости, с которой развертывается кабель. Технический результат – повышение информативности получаемых данных. 6 н. и 37 з.п. ф-лы, 13 ил.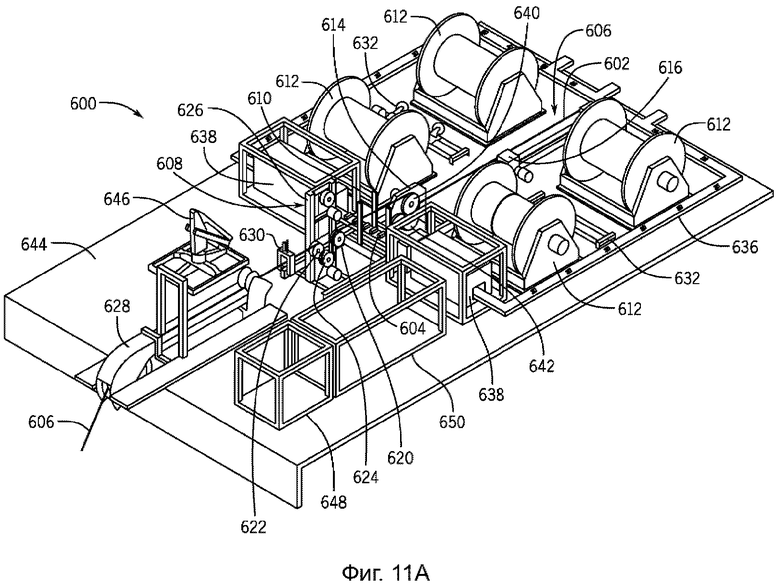
1. Система развертывания узла, содержащая
источник кабеля, выполненный с возможностью обеспечения кабеля для прикрепления одного или большего количества узлов, при этом один или большее количество узлов выполнены с возможностью развертывания в толще воды вдоль кабеля; соединительное устройство, выполненное с возможностью приведения в движение кабеля, при этом скорость для осуществления прикрепления кабеля, смежного с соединительным устройством, уменьшается для прикрепления одного или большего количества узлов относительно скорости развертывания, при которой кабель развертывается в толщу воды.
2. Система развертывания узла по п. 1, отличающаяся тем, что соединительное устройство дополнительно содержит кормовую буферную систему, которая попеременно принимает длину кабеля и высвобождает накопленную длину кабеля.
3. Система развертывания узла по п. 1, отличающаяся тем, что соединительное устройство дополнительно содержит
носовую буферную систему, которая попеременно принимает длину кабеля и высвобождает накопленную длину кабеля; и
кормовую буферную систему, которая попеременно принимает длину кабеля и высвобождает накопленную длину кабеля в сочетании с и в противоположность к приему и высвобождению, выполняемым носовой буферной системой.
4. Система развертывания узла по п. 1, отличающаяся тем, что соединительное устройство выполнено с возможностью приводить часть кабеля в возвратно-поступательное движение, так что скорость для осуществления прикрепления кабеля, смежного с соединительным устройством, периодически увеличивается и уменьшается относительно скорости развертывания, при которой кабель развертывают в толщу воды.
5. Система развертывания узла по п. 2, отличающаяся тем, что соединительное устройство выполнено с возможностью приведения части кабеля в возвратно-поступательное движение в продольном направлении вдоль траектории кабеля, определенной между источником кабеля и толщей воды.
6. Система развертывания узла по п. 2, отличающаяся тем, что соединительное устройство выполнено с возможностью приведения части кабеля в возвратно-поступательное движение поперечно к траектории кабеля, определенной между источником кабеля и толщей воды.
7. Система развертывания узла по п. 1, отличающаяся тем, что соединительное устройство содержит по меньшей мере один блок, прикрепленный к каретке; и
кабель, входящий в контакт с кареткой посредством по меньшей мере одного блока.
8. Система развертывания узла по п. 7, дополнительно содержащая механический привод, выполненный с возможностью приведения в движение каретки таким образом, что скорость для осуществления прикрепления части кабеля, смежной с соединительным устройством, является периодически приблизительно отсутствующей для прикрепления одного или большего количества узлов.
9. Система развертывания узла по п. 8, отличающаяся тем, что скорость каретки составляет от 1/8 до 1/2 скорости развертывания, при которой кабель развертывается в толщу воды, включительно, когда часть кабеля приблизительно неподвижна.
10. Система развертывания узла по п. 7, отличающаяся тем, что скорость каретки составляет половину скорости развертывания, при которой кабель развертывается в толщу воды, или меньше, когда прикрепляют один или большее количество узлов, или при этом скорость каретки составляет одну четверть скорости развертывания, при которой кабель развертывают в толщу воды, или меньше, когда прикрепляют один или большее количество узлов.
11. Система развертывания узла по п. 1, отличающаяся тем, что соединительное устройство содержит множество блочных компонентов, прикрепленных к каретке, совершающей возвратно-поступательное движение; и
кабель присоединен к каретке, совершающей возвратно-поступательное движение, посредством зацепления с множеством блочных компонентов.
12. Система развертывания узла по п. 11, отличающаяся тем, что кабель совершает только один проход между блочными компонентами, закрепленными на каретке, для прикрепления к нему одного или большего количества узлов; или
по меньшей мере некоторые из блочных компонентов закреплены в противоположных местах на каретке, а кабель совершает между ними по меньшей мере два прохода.
13. Система развертывания узла по п. 11, дополнительно содержащая по меньшей мере один неподвижный блок, зафиксированный относительно движения каретки, совершающей возвратно-поступательное движение, при этом кабель зацеплен между кареткой, совершающей возвратно-поступательное движение, и по меньшей мере одним неподвижным блоком.
14. Система развертывания узла по п. 1, дополнительно содержащая зацеп или препятствие, расположенное вдоль кабеля, при этом соединительное устройство выполнено с возможностью управления буферной длиной кабеля, чтобы контролировать или поддерживать скорость или натяжение, при которых кабель обеспечивается источником кабеля или разворачивается или извлекается из толщи воды, когда зацеп или препятствие устранены.
15. Способ развертывания узла на кабеле, который включает в себя
стравливание конца кабеля в толщу воды;
приведение участка кабеля в движение относительно конца, стравливаемого в толщу воды, при этом скорость участка периодически уменьшают относительно конца кабеля, стравливаемого в толщу воды;
соединение узла с секцией при снижении скорости и
развертывание узла в толще воды на кабеле.
16. Способ по п. 15, отличающийся тем, что
участок кабеля является по существу неподвижным по отношению к узлу, когда узел присоединяют к нему; или
участок кабеля является периодически по существу неподвижным относительно узла в течение от одной десятой секунды до по меньшей мере одной секунды.
17. Способ по п. 15, дополнительно включающий в себя
управление буферной длиной кабеля, чтобы контролировать или поддерживать скорость или натяжение, при которых кабель обеспечивается или стравливается в толщу воды или извлекается из толщи воды; и
отсоединение зацепа или препятствие от кабеля, пока скорость или натяжение контролируют или поддерживают.
18. Способ по п. 15, отличающийся тем, что
скорость секции кабеля уменьшают в течение по меньшей мере пяти секунд в течение каждого периода периодического движения относительно конца кабеля, стравливаемого в толщу воды, или
скорость секции кабеля уменьшают в течение по меньшей мере 25% периода возвратно-поступательного движения относительно конца кабеля, стравливаемого в толщу воды.
19. Способ по п. 15, дополнительно включающий в себя зацепление участка кабеля с по меньшей мере одним блочным компонентом, прикрепленным к каретке, совершающей возвратно-поступательное движение, при этом тем самым приводя ее в периодическое движение.
20. Способ по п. 19, отличающийся тем, что
участок кабеля совершает один проход только между такими блочными компонентами, которые закреплены в каждом из двух противоположных мест на каретке, совершающей возвратно-поступательное движение; или
секция кабеля совершает по меньшей мере два прохода между такими блочными компонентами, которые закреплены в каждом из двух противоположных мест на каретке, совершающей возвратно-поступательное движение.
21. Способ по п. 15, отличающийся тем, что максимальная скорость возвратно-поступательного движения каретки составляет долю 1/n или менее от скорости кабеля, при которой разворачивают узлы, при этом n составляет от двух до восьми включительно.
22. Способ по п. 15, дополнительно включающий в себя контролирование натяжением в кабеле с помощью системы шкива, расположенной между толщей воды и участком кабеля, который совершает возвратно-поступательное движение, причем возвратно-поступательное движение ориентировано по существу поперечно или продольно вдоль траектории, определенной между обеспечением кабеля и стравливанием конца кабеля в толщу воды.
23. Система развертывания узла, содержащая
источник кабеля, выполненный с возможностью обеспечения кабеля;
один или большее количество узлов, выполненных с возможностью присоединения к кабелю в месте для осуществления прикрепления для развертывания в толщу воды;
устройство присоединения узла, выполненное с возможностью прикрепления и открепления узлов к кабелю;
систему прикрепления узла, выполненную с возможностью приведения первой части кабеля в периодическое движение между источником кабеля и устройством присоединения узла и приведения второй части кабеля в периодическое движение между устройством присоединения узла и толщей воды, при этом первую скорость третьей части кабеля существенно снижают смежно с местом для осуществления прикрепления относительно второй скорости кабеля, когда его развертывают с прикрепленными узлами в толщу воды или когда его извлекают из толщи воды.
24. Система развертывания узла по п. 23, отличающаяся тем, что первая скорость периодически по существу равна нулю, так что третья часть кабеля не перемещается по отношению к месту для осуществления прикрепления.
25. Система развертывания узла по п. 23, отличающаяся тем, что система прикрепления узла дополнительно содержит кормовую буферную систему, которая попеременно принимает длину кабеля и высвобождает накопленную длину кабеля.
26. Система развертывания узла по п. 23, отличающаяся тем, что система прикрепления узла дополнительно содержит
носовую буферную систему, которая попеременно принимает длину кабеля и высвобождает накопленную длину кабеля; и
кормовую буферную систему, которая попеременно принимает длину кабеля и высвобождает накопленную длину кабеля в сочетании с и в противоположность к приему и высвобождению, выполняемым носовой буферной системой, так что периодическое движение является возвратно-поступательным.
27. Система развертывания узла по п. 26, отличающаяся тем, что носовая буферная система дополнительно содержит
носовую рейку;
носовой ведущий блок, подвижно соединенный с носовой рейкой и вокруг которого проходит кабель; и
двигатель, который приводит в движение носовой ведущий блок назад и вперед вдоль носовой рейки, чтобы выбрать длину кабеля и высвободить накопленную длину кабеля.
28. Система развертывания узла по п. 26, отличающаяся тем, что кормовая буферная система дополнительно содержит
кормовую рейку;
кормовой ведущий блок, подвижно соединенный с кормовой рейкой и вокруг которого проходит кабель; и
двигатель, который приводит в движение кормовой ведущий блок назад и вперед вдоль кормовой рейки, чтобы выбрать длину кабеля и высвободить накопленную длину кабеля.
29. Система развертывания узла по п. 26, отличающаяся тем, что кормовая буферная система дополнительно содержит
первый стационарный базовый блок, расположенный на конце кормовой рейки и вокруг которого проходит кабель; и
второй неподвижный базовый блок, расположенный на расстоянии от первого базового блока, расположенный на конце кормовой рейки и вокруг которого проходит кабель;
при этом кормовой ведущий блок проходит между первым и вторым неподвижными базовыми блоками.
30. Система развертывания узла по п. 26, отличающаяся тем, что кормовая рейка расположена в вертикальной ориентации.
31. Система развертывания узла по п. 26, дополнительно содержащая натяжной приводной блок, расположенный между носовой буферной системой и кормовой буферной системой, через который проходит кабель, при этом натяжной приводной блок продвигает кабель в направлении толщи воды и контролирует натяжение в кабеле между системой прикрепления узла и толщей воды.
32. Система развертывания узла по п. 23, отличающаяся тем, что источник кабеля представляет собой приводимую в движение двигателем катушку.
33. Система развертывания узла по п. 23, отличающаяся тем, что вторая скорость кабеля представляет собой вектор скорости с абсолютным значением до 5 м/с.
34. Система развертывания узла по п. 23, дополнительно содержащая систему контроля, которая координирует возвратно-поступательное движение первой части кабеля с возвратно-поступательным движением второй части кабеля.
35. Судно, имеющее систему развертывания узла в соответствии с п. 23, каждая из которых расположена на его задней палубе.
36. Способ развертывания узла на кабеле, включающий в себя
обеспечение кабеля от источника кабеля;
стравливание конца кабеля в толщу воды со скоростью выхода за борт;
приведение в периодическое движение первой части кабеля между источником кабеля и местом для осуществления прикрепления узла;
приведение в периодическое движение второй части кабеля между местом для осуществления прикрепления узла и толщей воды, при этом третья часть кабеля, расположенная в месте для осуществления прикрепления узла, перемещается со скоростью для осуществления прикрепления, которая уменьшена по отношению к скорости выхода за борт;
присоединение узла к третьей части кабеля на скорости для осуществления прикрепления и
развертывание третьей части кабеля с прикрепленным узлом в толщу воды при скорости выхода за борт.
37. Способ по п. 36, отличающийся тем, что периодическое движение является возвратно-поступательным, а скорость для осуществления прикрепления снижают по существу до нуля по отношению к узлу, когда узел присоединяют к третьей части кабеля.
38. Способ по п. 36, дополнительно включающий в себя уменьшение скорости третьей части до скорости для осуществления прикрепления в течение по меньшей мере пяти секунд в течение каждого периода периодического движения.
39. Способ по п. 36, отличающийся тем, что скорость выхода за борт составляет до 5 м/с, или скорость выхода за борт составляет 5 м/с или более.
40. Способ по п. 36, отличающийся тем, что скорость периодического движения первой части кабеля составляет до половины скорости выхода за борт.
41. Способ по п. 36, отличающийся тем, что скорость периодического движения второй части кабеля составляет до половины скорости выхода за борт.
42. Способ по п. 36, дополнительно включающий в себя контролирование натяжения в кабеле между толщей воды и первой частью при периодическом движении.
43. Способ извлечения узла, включающий в себя
вытягивание развернутого кабеля с прикрепленными узлами из толщи воды со скоростью подъема на борт;
приведение в периодическое возвратно-поступательное движение первой части кабеля между кабельной катушкой и местом для осуществления открепления узла; приведение в периодическое возвратно-поступательное движение второй части кабеля между местом для осуществления открепления узла и толщей воды, при этом третья часть кабеля, расположенная в месте для осуществления открепления узла, перемещается со скоростью для осуществления открепления, которая уменьшена по отношению к скорости подъема на борт;
отсоединение узла от третьей части кабеля на скорости для осуществления открепления и
накапливание кабеля вокруг кабельной катушки при скорости наматывания, равной скорости подъема на борт.
| US 2010054078 A1, 04.03.2010 | |||
| US 2017082763 A1, 23.03.2017 | |||
| WO 2013109672 A1, 25.07.2013 | |||
| US 4570245 A, 11.02.1986 | |||
| Составная гиря для безмена и других рычажных весов | 1925 |
|
SU2559A1 |
| КОМПЛЕКС ДЛЯ БУКСИРОВКИ ЗАБОРТНОГО СЕЙСМООБОРУДОВАНИЯ | 2010 |
|
RU2427859C1 |

