Изобретение относится к бесконтактным подшипникам вращения и может быть использовано преимущественно для валов и роторов высокоскоростных машин, таких как турбокомпрессоры, высокооборотные электродвигатели, генераторы, инерционные накопители энергии, пылесосы.
Известен гибридный магнитный подшипник вращения, содержащий подвижную и неподвижную части с разделенными магнитным зазором плоскими кольцевыми площадками, подвижная часть которого содержит кольцевые выступы, а неподвижная часть включает электромагнит с катушкой и магнитопроводом [1]. Постоянный магнит с радиальным направлением намагничивания выполнен в форме трубы. Он размещен в подвижной части подшипника. Такое конструктивное решение ограничивает частоту вращения подшипника. Это связано с тем, что современные магниты изготавливают из неодимовых сплавов, имеющих низкую прочность. Такие магниты разрушаются под действием больших центробежных сил.
Наиболее близким к настоящему изобретению является гибридный магнитный подшипник вращения, содержащий подвижную и неподвижную части с разделенными магнитным зазором плоскими кольцевыми площадками. Подвижная часть подшипника выполнена в виде диска с кольцевыми выступами, а неподвижная часть включает электромагнит с катушкой и магнитопроводом, содержащим наружный участок в форме трубы и средний участок в форме диска. К диску своим плоским полюсом присоединен постоянный магнит в форме трубы, размещенный внутри магнитопровода [2].
Размещение постоянного магнита в неподвижной части подшипника устраняет недостатки аналога. Наружная цилиндрическая часть магнитопровода разделена на несколько секторов, на которых установлены катушки электромагнита. Данное техническое решение позволяет менять величину магнитного потока, создаваемого постоянным магнитом с помощью электромагнита.
Недостатком прототипа является сложность конструкции. Подшипник имеет большие габариты. Наличие «паразитных» окон на магнитопроводе ослабляет магнитное поле и снижет несущую способность и жесткость подшипника.
Настоящее изобретение направлено на устранение недостатков прототипа.
Новый гибридный магнитный подшипник вращения, также как и прототип, содержит подвижную и неподвижную части с разделенными магнитным зазором плоскими кольцевыми площадками магнитного взаимодействия. Подвижная часть подшипника выполнена в форме диска с кольцевыми выступами, а неподвижная часть включает электромагнит с катушкой и магнитопроводом. Последний содержит наружный участок в форме трубы и средний участок в форме диска, к которому своим кольцевым плоским полюсом присоединен постоянный магнит в форме трубы, размещенный соосно с наружным участком магнитопровода и имеющий осевое направление намагничивания.
Катушка электромагнита выполнена в форме тела вращения и размещена целиком во внутренней цилиндрической полости, находящейся между цилиндрической частью магнитопровода и постоянным магнитом, коаксиально с ним.
Толщина кольцевых площадок, образованных выступами подвижного диска и неподвижного магнитопровода, связана с толщиной кольцевого полюса постоянного магнита и его диаметром формулой:
h=k*H*(D/d), где
Н и D - толщина и наружный диаметр кольцевого полюса постоянного магнита и соответствующая этим значениям толщина и диаметр внутреннего кольцевого выступа подвижного диска;
h и d - толщина и наружный диаметр наружной цилиндрической части магнитопровода и соответствующая этим значениям толщина и диаметр внешнего кольцевого выступа подвижного диска;
k=0,8…1,2 - коэффициент, учитывающий магнитные свойства магнитопровода.
Формула, представленные выше, получена, исходя из обеспечения постоянства магнитного потока.
Новое конструктивное решение позволяет устранить недостатки прототипа. Подшипник, как и прототип, решает задачу управления магнитным потоком и силой реакции, но является более простым. Вместо нескольких катушек электромагнита используется одна. Магнитопровод выполнен цельным, без «паразитных» окон. Это способствует усилению магнитного потока, повышению несущей способности и увеличению жесткости подшипника. Кроме этого снижаются габариты подшипника, поскольку катушка не выходит за пределы магнитопровода.
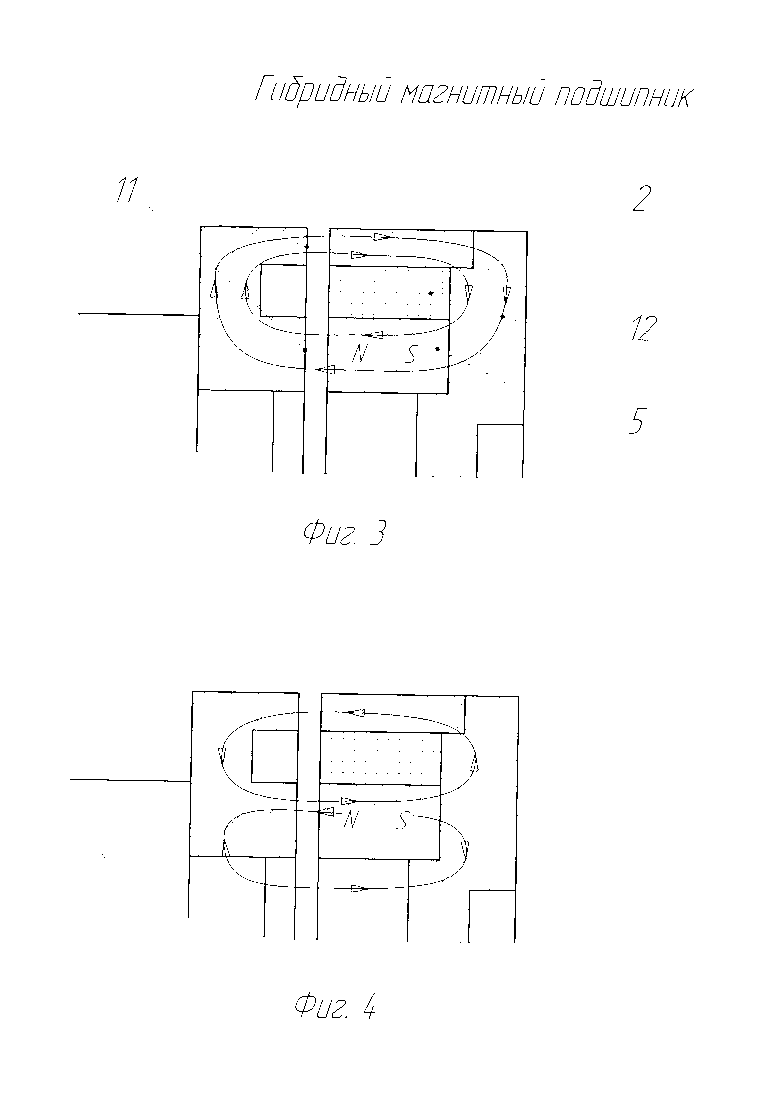
Пример реализации изобретения представлен на чертежах. На фиг. 1 показан новый гибридный подшипник в разрезе. На фиг. 2 представлены характерные размеры основных частей подшипника. На фиг. 3 и фиг. 4 показаны схемы магнитных силовых линий при разном направлении тока в катушке.
Гибридный магнитный подшипник вращения содержит подвижную и неподвижную части с разделенными магнитным зазором «δ» плоскими кольцевыми площадками магнитного взаимодействия (фиг. 1). Подвижная часть подшипника выполнена в форме диска 1 с кольцевыми выступами 11, а неподвижная часть включает электромагнит с катушкой 2 и магнитопроводом. Последний содержит наружный участок в форме трубы 3 и средний участок в форме диска 4, к которому своим кольцевым плоским полюсом присоединен постоянный магнит 5 в форме трубы. Постоянный магнит 5 расположен соосно с наружным цилиндрическим участком 3 магнитопровода. Он имеет осевое направление намагничивания.
Катушка 2 электромагнита выполнена в форме тела вращения и размещена целиком во внутренней цилиндрической полости, находящейся между цилиндрической частью 3 магнитопровода и постоянным магнитом 5, коаксиально с ним.
В центральном отверстии диска 4 с помощью крепежных деталей 6 и 7 закреплен датчик Холла 8, который через зазор взаимодействует с дополнительным магнитом 9.
Пример расчета конструктивных размеров гибридного подшипника, указанных на фиг. 2, представлен в таблице.

Гибридный подшипник устанавливается в паре с таким же подшипником, закрепленном на противоположном (левом) конце вала 10. Это позволяет уравновесить осевые силы, действующие на вал 10 и обеспечить постоянство осевого зазора «δ». Подшипник, установленный на левом конце вала (левый подшипник) выглядит зеркально по отношению к правому подшипнику, изображенному на фиг. 1.
Гибридный подшипник работает следующим образом.
При подаче тока в катушку 2 электромагнита в магнитопроводе создается магнитный поток, направление которого зависит от направления тока в катушке 2. При совпадении направления магнитного потока электромагнита и постоянного магнита 2 результирующий магнитный поток увеличивается. Это иллюстрируется формой и направлением магнитных силовых линий 12 (фиг. 3). При этом осевая сила притяжения подвижной части подшипника к неподвижной части увеличивается. При несовпадении направления магнитного потока электромагнита и постоянного магнита 2 результирующий магнитный поток уменьшается (фиг. 3). При этом осевая сила притяжения подвижной части подшипника к неподвижной части также уменьшается (фиг. 4).
Подшипник противодействует внешним силам, действующим в осевом и радиальном направлениях. Смещение вала 10 в радиальном направлении создает противодействующую этому смещению магнитную силу со стороны постоянного магнита 2, поскольку происходит удлинение магнитных силовых линий (фиг. 3 и 4). Реакция подшипника на осевое смещение вала 10 отрабатывается на основании разницы сигналов датчиков 8, размещенных на левом и правом концах вала 10. При осевом смещении вала 10 влево от среднего положения датчики 8 подают сигнал управляющей системе на увеличение тока в электромагните, расположенном в правом подшипнике. Одновременно происходит уменьшение тока в левом подшипнике. Вал 10 перемещается вправо и восстанавливает свое среднее положение. При этом восстанавливается заданное значение зазора «δ».
Настоящее изобретение с помощью простого конструктивного решения позволяет уменьшить габариты и одновременно увеличить несущую способность и жесткость гибридного магнитного подшипника. При этом уменьшаются затраты электрической энергии на питание электромагнита. Все это ведет к расширению области использования магнитных подшипников.
БИБЛИОГРАФИЯ
1. Патент TW 201226734 (A), 2012-07-01, МПК: F16C 32/04.
2. Патент US 2009315421 (А1), 2009-12-2, МПК: H02K 7/09; F16C 32/0465; F16C 32/048.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С МАГНИТНЫМ ПОДВЕСОМ ИНЕРЦИОННОГО ЭЛЕМЕНТА | 2020 |
|
RU2785951C2 |
| МАГНИТНЫЙ ОПОРНЫЙ УЗЕЛ | 2017 |
|
RU2697635C2 |
| ВТЯЖНОЙ ЭЛЕКТРОМАГНИТ | 2014 |
|
RU2581040C2 |
| Устройство для поверхностного пластического деформирования | 1984 |
|
SU1278190A1 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ОСЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2540215C1 |
| БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2533886C1 |
| УКАЗАТЕЛЬНОЕ ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 2014 |
|
RU2581046C2 |
| ИНДИКАТОР | 1994 |
|
RU2119193C1 |
| Беспазовый синхронный генератор с интегрированным магнитным подвесом | 2016 |
|
RU2647490C1 |
| БЕСКОЛЛЕКТОРНЫЙ ДВУХРОТОРНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2531029C1 |
Изобретение относится к бесконтактным подшипникам вращения и может быть использовано преимущественно для валов и роторов высокоскоростных машин, таких как турбокомпрессоры, высокооборотные электродвигатели, генераторы, инерционные накопители энергии, пылесосы. Гибридный магнитный подшипник вращения содержит подвижную и неподвижную части с разделенными магнитным зазором плоскими кольцевыми площадками магнитного взаимодействия. Подвижная часть подшипника выполнена в форме диска (1) с кольцевыми выступами (11), а неподвижная часть включает электромагнит с катушкой (2) и магнитопроводом. Магнитопровод содержит наружный участок в форме трубы (3) и средний участок в форме диска (4), к которому своим кольцевым плоским полюсом присоединен постоянный магнит (5) в форме трубы. Постоянный магнит (5) расположен соосно с наружным цилиндрическим участком (3) магнитопровода и имеет осевое направление намагничивания. Катушка (2) электромагнита выполнена в форме тела вращения и размещена целиком во внутренней цилиндрической полости, находящейся между цилиндрической частью (3) магнитопровода и постоянным магнитом (5), коаксиально с ним. Технический результат: упрощение конструкции, снижение габаритов, увеличение несущей способности и жесткости. 1 з.п. ф-лы, 4 ил., 1 табл.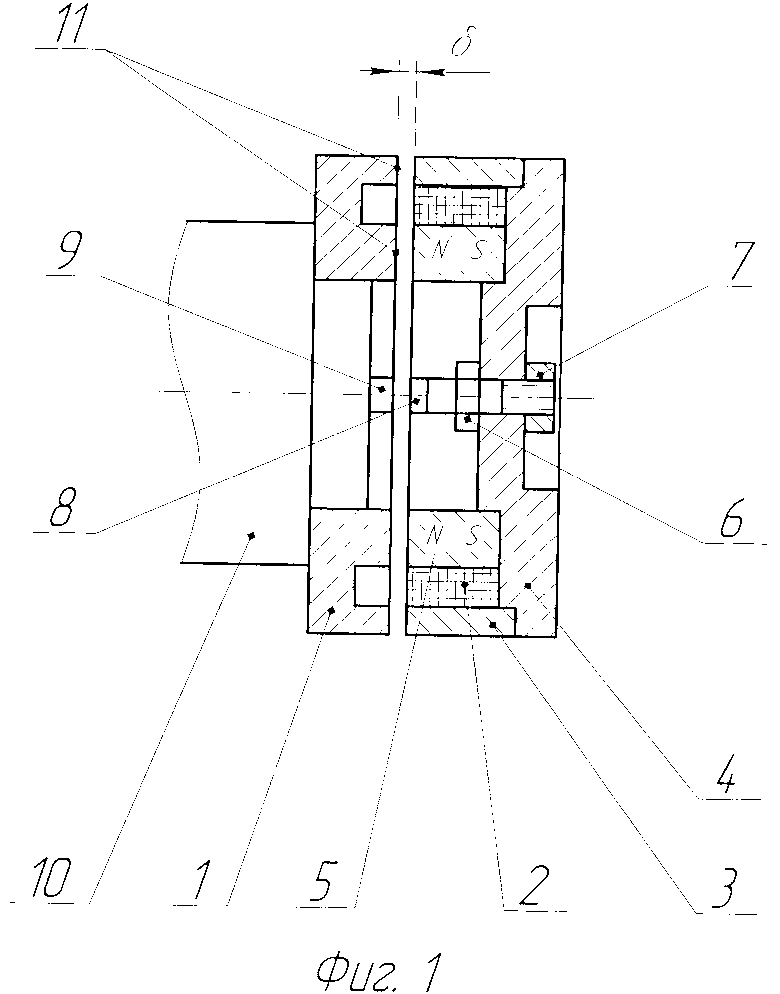
1. Гибридный магнитный подшипник вращения, содержащий подвижную и неподвижную части с разделенными магнитным зазором плоскими кольцевыми площадками, подвижная часть которого выполнена в форме диска с кольцевыми выступами, а неподвижная часть включает электромагнит с катушкой и магнитопроводом, содержащим наружный участок в форме трубы и средний участок в форме диска, к которому своим кольцевым плоским полюсом присоединен постоянный магнит в форме трубы, расположенный соосно с наружным участком магнитопровода и имеющий осевое направление намагничивания, отличающийся тем, что катушка электромагнита выполнена в форме тела вращения и размещена целиком во внутренней цилиндрической полости, находящейся между цилиндрической частью магнитопровода и постоянным магнитом коаксиально с ним.
2. Магнитный подшипник вращения по п. 1, отличающийся тем, что толщина кольцевых площадок, образованных выступами подвижного диска и неподвижного магнитопровода, связана с толщиной кольцевого полюса постоянного магнита и его диаметром формулой:
h=k*H*(D/d),
где Н и D - толщина и наружный диаметр кольцевого полюса постоянного магнита и соответствующая этим значениям толщина и диаметр внутреннего кольцевого выступа подвижного диска;
h и d - толщина и наружный диаметр наружной цилиндрической части магнитопровода и соответствующая этим значениям толщина и диаметр внешнего кольцевого выступа подвижного диска;
k=0,8 … 1,2 - коэффициент, учитывающий магнитные свойства магнитопровода.
| US 2009315421 A1, 24.12.2009 | |||
| TW 201226734 A, 01.07.2012 | |||
| Счетное устройство сновальной машины | 1976 |
|
SU571533A1 |
| Логический элемент | 1984 |
|
SU1223357A1 |
| УПОРНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ПОДШИПНИК (ВАРИАНТЫ) | 2002 |
|
RU2239108C2 |

