Изобретение относится к области приборостроения и может быть использовано в составе гироскопов и других навигационных приборов инерциального типа в системах ориентации и навигации подвижных объектов: (ракет, самолетов, судов, автомобилей), а также - в инклинометрах, служащих для подземной ориентации бурового инструмента.
Датчики угловой скорости и гироскопы с магнитным подвесом инерционного элемента позволяют получить наиболее высокие параметры точности измерений по сравнению с другими типами гироскопических приборов.
Известен гироскоп с бесконтактным магнитным подвесом инерционного элемента в форме кольца из ферромагнитного материала, размещенного с равномерным радиальным зазором относительно статора, содержащего электромагнитные катушки, расположенные вокруг центральной оси статора [1]. Данный гироскоп имеет сферическую форму инерционного элемента (ротора). Левитация обеспечивается за счет разнонаправленного силового магнитного воздействия электромагнитов, установленных на радиальных выступах статора, смещенных вдоль оси статора и ограниченных коническими поверхностями. Гироскоп содержит также отдельный привод вращения ротора, который размещен внутри ротора.
Недостатком данного гироскопа является сложность конструкции.
Известно магнитное подвесное устройство космического применения, которое может быть использовано в качестве датчика угловой скорости и гироскопа [2]. Устройство содержит ротор в форме кольца из ферромагнитного материала, размещенного с равномерным радиальным зазором относительно цилиндрической поверхности статора, содержащего электромагнитные катушки. Ротор выполнен сборным. Он включает два кольцевых диска и размещенный между ними постоянный магнит с осевой поляризацией. Кроме этого к ротору снизу присоединены дополнительные магниты, служащие для обеспечения вращения ротора с помощью отдельных электромагнитных катушек.
Данное устройство частично устраняет недостатки аналога, поскольку в системе левитации отсутствует механизм поддержания равновесия вдоль оси ротора. Это достигается за счет использования узких кольцевых цилиндрических участков магнитного взаимодействия ротора и статора. При осевом смещении ротора магнитно-силовые линии удлиняются и подобно пружине автоматически возвращают ротор в исходное положение.
Однако наличие сборного ротора и отдельного привода его вращения существенно усложняют конструкцию устройства.
Настоящее изобретение направлено на упрощение конструкции прототипа.
Новый датчик угловой скорости, также как и прототип, содержит инерционный элемент в форме кольца из ферромагнитного материала. С помощью уравновешенных магнитных сил инерционный элемент удерживается с равномерным радиальным зазором относительно цилиндрической поверхности статора, содержащего электромагнитные катушки.
Инерционный элемент выполнен в форме тонкого диска, имеет одинаковую толщину и размещен в одной плоскости со статором. Последний имеет форму плоской пластины и содержит ступенчатое по контуру отверстие. Контур отверстия включает пазы, между которыми находятся направленные к центру статора консоли. На них установлены катушки, причем консоли ограниченны внутренней цилиндрической поверхностью. Внутри этой поверхности размещен кольцевой инерционный элемент.
Новое техническое решение позволяет упростить конструкцию устройства. Инерционный элемент состоит из одной детали, тогда как у прототипа их 3-4 (варианты). Появляется возможность исключить из устройства постоянные магниты и катушки привода вращения.
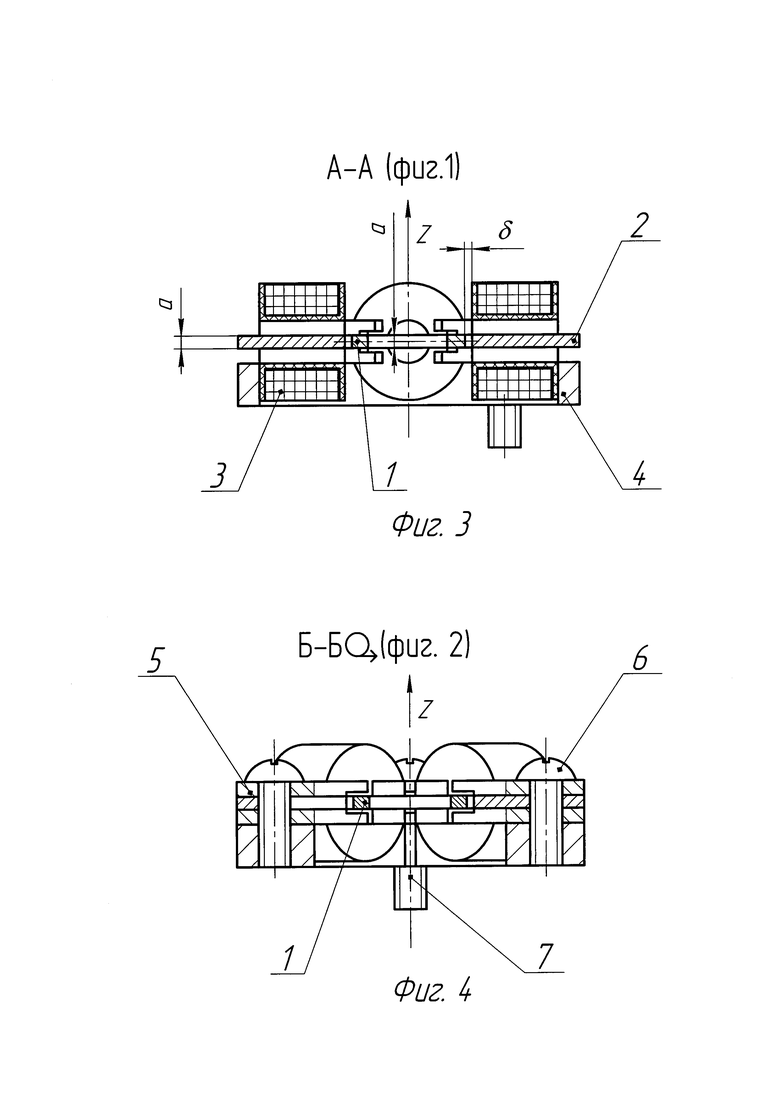
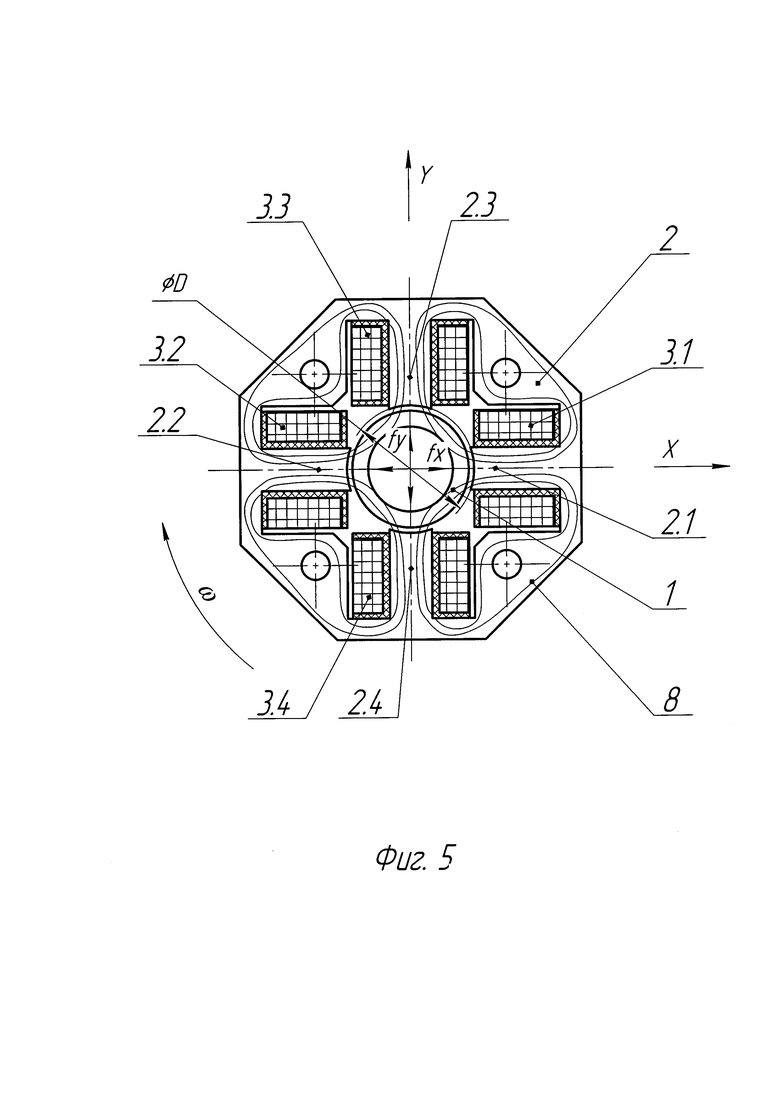
Пример реализации изобретения представлен на чертежах. На фиг. 1 и 2 представлены внешние виды датчика, на фиг. 3 и 4 даны разрезы, а на фиг. 5 и 6 показаны схемы, поясняющие работу датчика.
Датчик угловой скорости содержит инерционный элемент 1 в форме кольца из ферромагнитного материала. С помощью магнитных сил инерционный элемент 1 удерживается с равномерным радиальным зазором 5 относительно цилиндрической поверхности статора 2, содержащего электромагнитные катушки 3 (фиг. 1-4).
Инерционный элемент 1 выполнен в форме тонкого диска. Он имеет одинаковую толщину и размещен в одной плоскости со статором: a=b, где а - толщина кольца, b - толщина пластины статора (фиг. 3). Статор 2 имеет форму плоской пластины и содержит ступенчатое по контуру отверстие (фиг. 1, 5 и 6). Контур отверстия включает четыре пары параллельных пазов (фиг. 1 и 5). Между пазами каждой пары образована консоль. Каждая консоль направлена к центру статора 2. На консолях 2.1, 2.2, 2.3 и 2.4. установлены катушки 3.1, 3.2. 3.3 и 3.4. Консоли ограниченны внутренней цилиндрической поверхностью диаметром D (фиг. 5). Внутри этой поверхности размещен кольцевой инерционный элемент 1 (фиг. 1-5).
При отключенных катушках 3 инерционный элемент удерживается от выпадения с помощью прихватов 5. Детали датчика монтируются на основании 4 с помощью винтов 6 (фиг. 4). Винты 7 служат для крепления датчика к корпусу.
Датчик работает следующим образом.
Левитация инерционного элемента осуществляется путем изменения радиальной силы, создаваемой электромагнитными катушками 3 в зависимости от зазора δ (фиг. 1). При этом осевое положение (по оси Z) инерционного элемента поддерживается автоматически за счет упругой силовой реакции на изгиб магнитно-силовых линий проходящих, через тонкие пластины статора и инерционного элемента. Катушки 3 питаются одновременно постоянным и переменным током. Постоянный ток используется для создания магнитной силы, а переменный - для измерения индуктивности катушек 3.
При смещении инерционного элемента вправо зазор 8 уменьшается, индуктивность на катушке 3.1 увеличивается. Соответствующее возрастание падения переменного напряжения используется управляющей системой для уменьшения тока в катушке 3.1 и увеличения тока в катушке 3.2. Притягивающая сила, действующая со стороны катушки 3.1 вправо, уменьшается, а сила, действующая со стороны катушки влево, увеличивается. В результате инерционный элемент смещается влево и величина зазора δ восстанавливается.
Датчик угловой скорости может работать при колебательном и вращательном движении инерционного элемента.
В первом случае инерционному элементу сообщают низкочастотные первичные колебания fx по оси X (фиг. 5). При повороте датчика вокруг оси Z (фиг. 3) в плоскости XY с угловой скоростью со вследствие ускорения Кориолиса появляются вторичные колебания инерционного элемента fy вдоль оси Y (фиг. 5). Определение угловой скорости датчика осуществляют на основании измерения индуктивности катушек 3.3 и 3.4 и определения амплитуды вторичных колебаний fy.
Во втором случае инерционному элементу, имеющему 4-х полюсное окружное намагничивание, сообщают вращательное движение ω1 (фиг. 6). При развороте датчика вокруг оси X с угловой скоростью ω2 вследствие ускорения Кориолиса появляется гироскопический момент, приводящий к развороту инерционного элемента вокруг оси Y с угловой скоростью ω3. Определение угловой скорости датчика ω2 осуществляют на основании измерения индуктивности катушек 3.3 и 3.4 и определения угловой скорости ω3.
В отличие от прототипа, у которого магнитно-силовые линии системы левитации замыкаются в плоскостях, проходящих через ось вращения ротора, в новой конструкции магнитно-силовые линии замыкаются в плоскости, перпендикулярной оси вращения инерционного элемента (фиг. 6). Это позволяет осуществить вращение инерционного элемента без использования отдельного привода вращения, а - путем добавления к высокочастотному току системы левитации низкочастотного сигнала. Данная функциональная особенность датчика позволяет упростить его конструкцию.
БИБЛИОГРАФИЯ
1. Патент RU 2589939(13)01; 2016-07-10; МПК G01C 19/24.
2. Патент US 4285553 (А1), 1979-05-02; МПК F16C 39/06.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2270417C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2267746C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| СПОСОБ ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА (ВАРИАНТЫ) И СПОСОБ ЗАПОЛНЕНИЯ ЦИЛИНДРИЧЕСКОГО ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА НЕСМЕШИВАЮЩИМИСЯ ЖИДКОСТЯМИ | 2004 |
|
RU2272252C1 |
| Гидродинамический гироскоп | 2021 |
|
RU2769078C1 |
| Электрошпиндель с магнитным подвесом ротора | 1988 |
|
SU1575270A1 |
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |


Изобретение относится к области приборостроения. Сущность изобретения заключается в том, что датчик угловой скорости с бесконтактным магнитным подвесом инерционного элемента в форме кольца из ферромагнитного материала содержит инерционный элемент, выполненный в форме тонкого диска, имеющий одинаковую толщину и размещен в одной плоскости со статором, имеющим форму плоской пластины и содержащим ступенчатое по контуру отверстие, включающее пазы, между которыми находятся направленные к центру статора консоли, на которых установлены катушки, причем консоли ограниченны внутренней цилиндрической поверхностью, внутри которой размещен кольцевой инерционный элемент. Технический результат - упрощение конструкции устройства. 6 ил.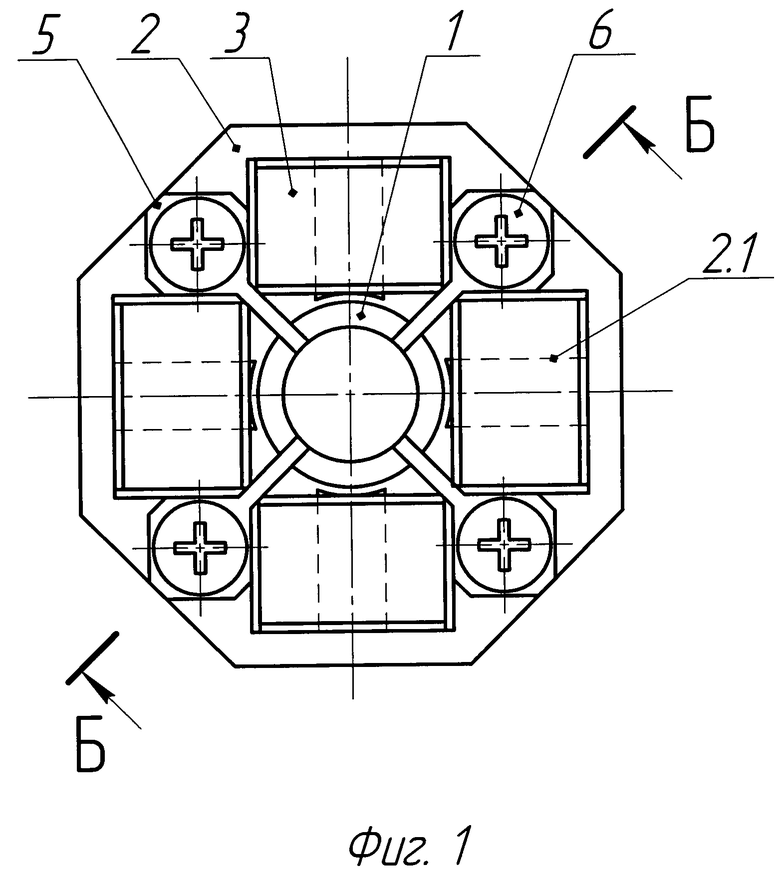
Датчик угловой скорости с бесконтактным магнитным подвесом инерционного элемента в форме кольца из ферромагнитного материала, размещенного с равномерным радиальным зазором относительно цилиндрической поверхности статора, содержащего электромагнитные катушки, отличающийся тем, что инерционный элемент выполнен в форме тонкого диска, имеет одинаковую толщину и размещен в одной плоскости со статором, имеющим форму плоской пластины и содержащим ступенчатое по контуру отверстие, включающее пазы, между которыми находятся направленные к центру статора консоли, на которых установлены катушки, причем консоли ограниченны внутренней цилиндрической поверхностью, внутри которой размещен кольцевой инерционный элемент.
| US 4285553 A, 25.08.1981 | |||
| CN 109238230 A, 18.01.2019 | |||
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1997 |
|
RU2130118C1 |

