Описание изобретения
Область техники.
Изобретение относится к транспорту, на основе индукционной магнитной левитации на постоянных магнитах, конкретно к магнитным подвесам. Уровень техники.
Магнитная левитация транспорта интересна в первую очередь, как возможность перемещать грузы или людей с высокой скоростью. При этом желательно использовать системы, которые надежны, просты в эксплуатации, строительстве и требуют меньшего обслуживания. Существуют три системы левитации: EDS на сверхпроводящих элементах, EMS на управляемых электромагнитах и Inductrack на постоянных магнитах. С развитием промышленного производства сильных постоянных магнитов на основе неодим-железо-бор, система Inuctrack стала привлекательной для конструкторов в силу ее простоты и экономичности по сравнению с другими системами. В этой системе массивы из постоянных магнитов устанавливаются на магнитных подвесах, которые крепятся к грузовой платформе. При движении магнитное поле этих массивов, собранных по схеме Халбаха [1] индуцирует токи в путевых дорожках, приводящих к появлению подъемной силы. На участках низкоскоростного движения на этих дорожках используется система замкнутых проводников, а на высокоскоростных участках дорожки покрываются алюминиевыми или медными листами. В последних конструкциях системы Inductrack, устойчивость поддерживается за счет двухскатной конфигурации путевой дорожки и расположения части магнитов под плоскостью дорожки [2]. На основе EDS и EMS систем в Японии и Германии построены поезда, на которых удалось достичь скоростей соответственно 550 км/час и 300 км/час. В США строится опытный участок, на котором с использованием системы Inductrack планируется достичь скорости 1000 км/час в вакууме. При высоких скоростях и с учетом возможных траекторий движения из-за рельефа местности, вопрос устойчивости транспорта становится приоритетным.
Раскрытие изобретения.
Технической проблемой решаемой настоящим изобретением является создание на постоянных магнитах устройства магнитной левитации транспортной платформы, обеспечивающего повышение устойчивости ее движения на высоких скоростях.
Сущность изобретения заключается в том, что устройство состоит из прикрепленных посредством опор к грузовой платформе магнитных подвесов с постоянными магнитами и путевых дорожек, внутри которых при движении грузовой платформы перемещаются магнитные подвесы с образованием индукционных токов, причем магнитные подвесы имеют форму цилиндра или многогранной призмы, поверхности подвесов покрыты постоянными магнитами собранными по схеме Халбаха, путевыми дорожками служат параллельные трубы из электропроводного немагнитного материала с продольным разрезом, причем внутренняя поверхность трубы каждой путевой дорожки в сечении повторяет контур сечения поверхности магнитных подвесов, на грузовой платформе установлен, по меньшей мере, один магнитный подвес вне путевых дорожек с магнитами собранными по однонаправленной схеме, где поле магнитов направлено вдоль или перпендикулярно направлению движения магнитных подвесов.
Есть варианты, когда магнитные подвесы внутри путевых дорожек имеют форму многогранных призм, а вне дорожек форму цилиндров или внутри путевых дорожек имеют форму цилиндров, а вне путевых дорожек форму многогранных призм или указанные призмы магнитных подвесов внутри и вне путевых дорожек имеют в основании разные виды многоугольников или указанные цилиндры магнитных подвесов внутри и вне путевых дорожек имеют основание разной формы. Есть вариант, когда внутри путевых дорожек дополнительно находятся магнитные подвесы, поверхности которых покрыты постоянными магнитами по однонаправленной схеме. Все подвесы, как внутри, так и вне путевых дорожек, с магнитами собранными по однонаправленной схеме имеют одинаковую длину и расположены на одинаковом расстоянии от переднего края грузовой платформы. В отличие от существующих решений, за счет размещения магнитных подвесов с постоянными магнитами, собранными по схеме Халбаха, внутри путевых дорожек, создаются большие силы демпфирования перемещения грузовой платформы во всех направлениях перпендикулярных движению, что повышает ее устойчивость. В случае, если трубы путевых дорожек имеют верхний продольный разрез, то изменяя ширину разреза труб путевых дорожек можно уменьшить энергозатраты на преодоление сил электродинамического торможения и снизить зависимость транспортной системы от рельефа местности. Достигается это увеличением ширины разреза путевых дорожек на участках где траектория движения и скорость позволяют сохранять устойчивость с минимальными демпфирующими силами и уменьшением ширины разреза на участках где требуются большие демпфирующие силы.
Влияние погодных условий на движение грузовой платформы можно устранить, разместив устройство с грузовой платформой внутри трубопровода, изготовленного в том числе из неэлектропроводного и немагнитного материала. С целью уменьшения влияния погодных условий, продольный разрез труб путевых дорожек можно сделать внизу или сбоку. При этом опору магнитных подвесов выполняют с возможностью крепления грузовой платформы с одной стороны и расположенного внутри путевой дорожки магнитного подвеса с другой стороны. Известно [3], что подвесы, покрытые магнитами по схеме Халбаха, отвечают за подъемную силу, возникающую при их движении над электропроводящей поверхностью.
Подвесы, покрытые постоянными магнитами по однонаправленной схеме, и находящиеся внутри путевых дорожек предназначены для создания дополнительной тяговой силы для ускорения платформы. Для этого отдельные отрезки труб путевых дорожек, электрически изолированы от остальной части путевых дорожек и выполнены таким образом, чтобы обеспечить протекание по ним тока с образованием электромагнитов с магнитным полем (магнитным моментом) перпендикулярным направлению движения магнитных подвесов. При пропускании тока через электромагнит, в зависимости от направления тока и направления поля однонаправленных магнитов возникают силы, действующие вдоль направления движения на подвес с постоянными магнитами, собранными по однонаправленной схеме, что обеспечивает рост скорости движения грузовой платформы. Торможение осуществляется за счет токов Фуко в путевых дорожках и изменения направления тока в электромагнитах.
Магнитные подвесы, с магнитами собранными по однонаправленной схеме и установленные под грузовой платформой вне путевых дорожек (вне путевые магнитные подвесы), предназначены для создания основной тяговой силы платформы. Для этого вне путевых дорожек, на одной линии с электромагнитами путевых дорожек размещают аналогичные электромагниты (вне путевые электромагниты). Все электромагниты, расположенные на одной линии, перпендикулярной направлению движения грузовой платформы, последовательно соединены электрическим кабелем, образуя единую группу электромагнитов, подключенных через коммутатор к источнику питания. Электромагниты представляют собой одновитковые или многовитковые индукционные катушки. Краткое описание чертежей.
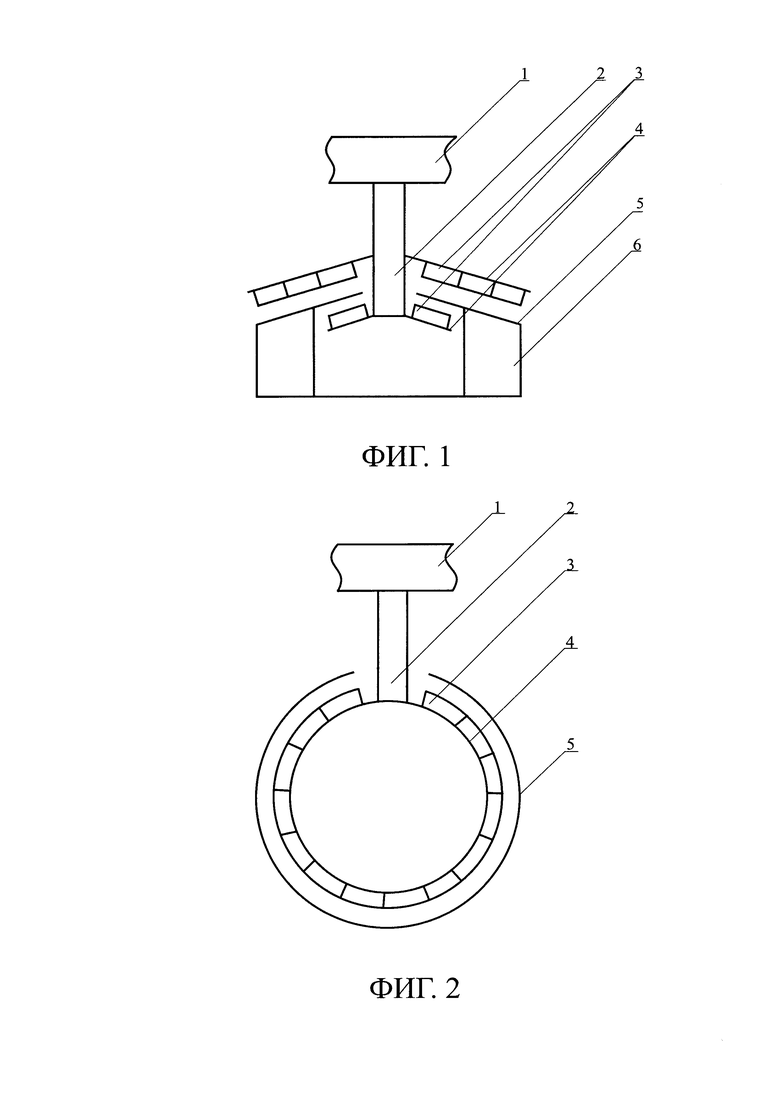
На фиг. 1 показан прототип устройства магнитной системы левитации на постоянных магнитах, собранных по схеме Халбаха, состоящий из двухъярусного подвеса с магнитами и двухскатной путевой дорожки.
На фиг. 2 показан вариант магнитного подвеса, выполненного в виде цилиндра, поверхность которого покрыта постоянными магнитами по схеме Халбаха, расположенного внутри соответствующей путевой дорожки, сечение трубы которой повторяет форму сечения цилиндрической поверхности магнитного подвеса.
На фиг. 3 показан вариант магнитного подвеса в виде треугольной призмы, протяженной вдоль направления движения, поверхность которого покрыта постоянными магнитами по схеме Халбаха, расположенного внутри соответствующей путевой дорожки, сечение трубы которой повторяет форму сечения поверхности треугольной призмы магнитного подвеса.
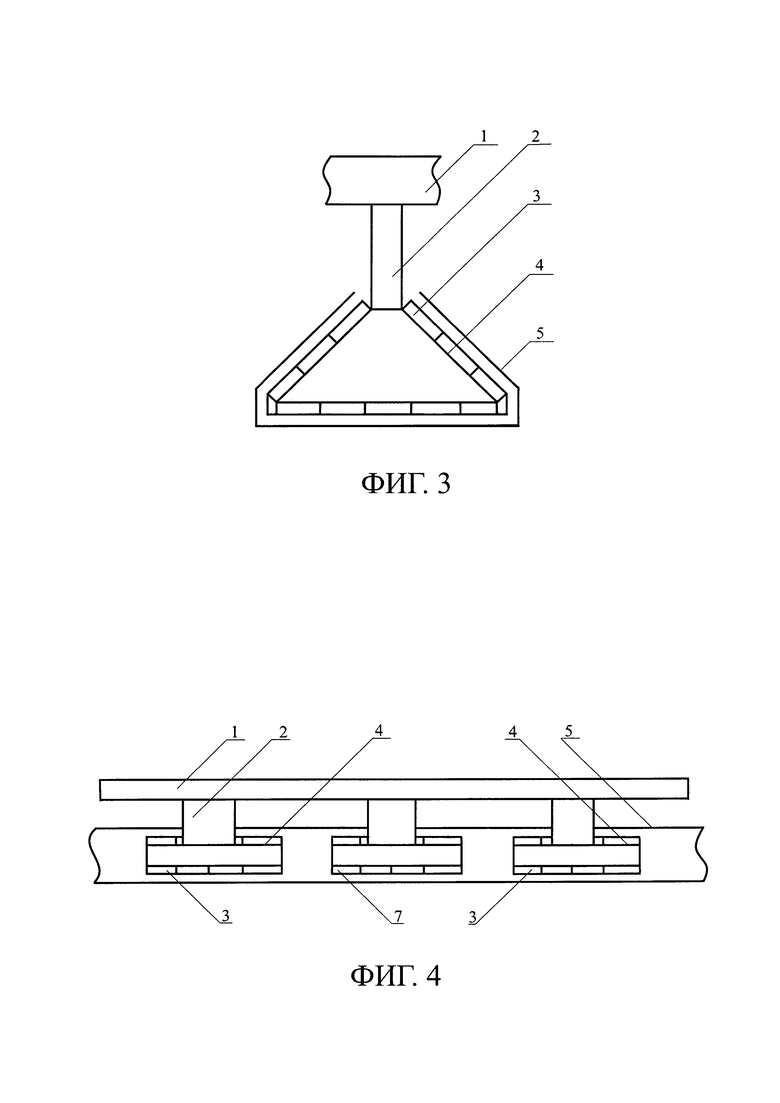
На фиг. 4 показан вид сбоку варианта расположения магнитных подвесов, с постоянными магнитами собранными по однонаправленной схеме и по схеме Халбаха, внутри путевой дорожки, выполненной в виде цилиндрической трубы.
На фиг. 5 показана по направлению движения платформы группа электромагнитов, соединенных электрическим кабелем, состоящая из электромагнитов путевых дорожек и расположенного между путевыми дорожками вне путевого электромагнита.
На фиг. 6 показан вид снизу одного из вариантов расположения на платформе магнитных подвесов, поверхности которых покрыты магнитами по схеме Халбаха и по однонаправленной схеме, с нахождением их внутри и между (вне) путевых дорожек, вместе с группой электромагнитов.
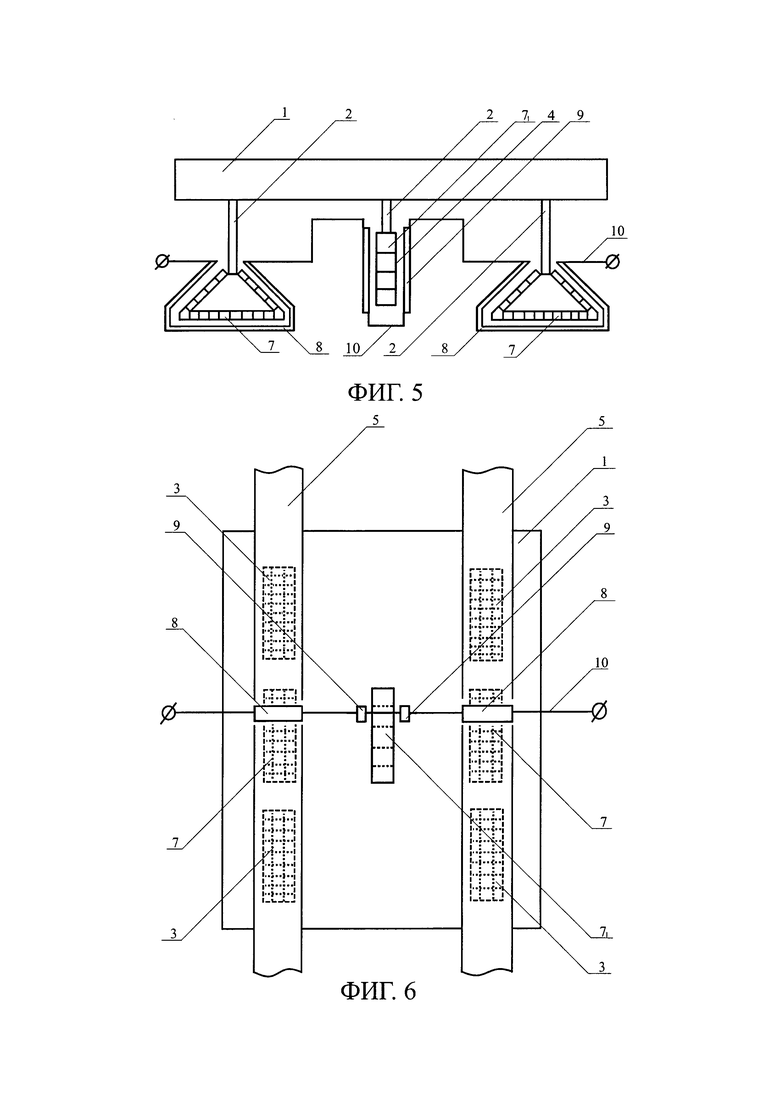
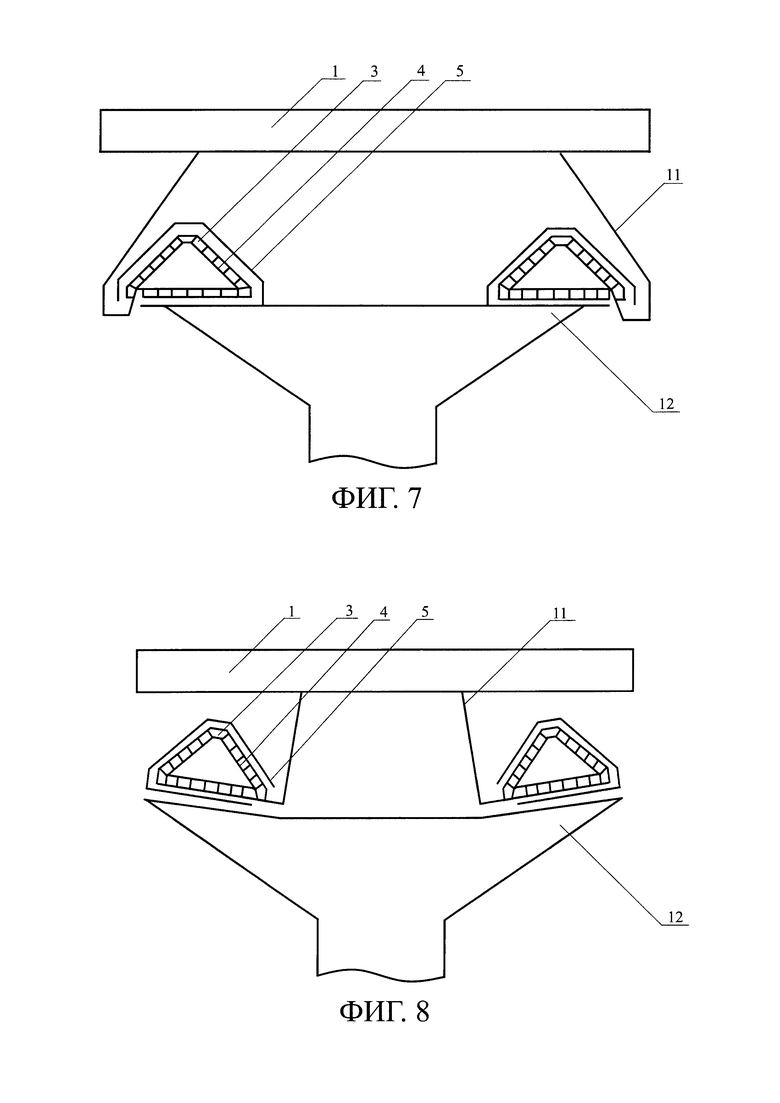
На фиг. 7 показана по направлению движения платформа, соединенная с помощью консольных опор с магнитными подвесами внутри путевых дорожек, имеющих продольный разрез внизу.
На фиг. 8 показана по направлению движения платформа, соединенная с помощью консольных опор с магнитными подвесами внутри путевых дорожек, расположенных под углом к горизонту, имеющих продольный разрез сбоку.
Осуществление изобретения.
Для иллюстрации предыдущих разработок на фиг. 1 показано устройство прототипа, состоящее из подвеса, имеющего боковые плоскости (4) над и под путевой дорожкой и саму путевую дорожку (5). На плоскостях подвесов установлены постоянные магниты, собранные по схеме Халбаха (3). Подвесы крепятся к грузовой платформе (1) с помощью опоры (2). Путевая дорожка представляет собой плоскую поверхность (5), поддерживаемая консольной конструкцией (6). Плоскость подвеса с магнитами под путевой дорожкой отвечает за силы демпфирующие перемещения в направлениях перпендикулярных движению. Из-за консольности поддерживающей конструкции, демпфирующие силы, пропорциональные проекциям площадей магнитов на проводящие дорожки, значительно меньше подъемной силы даже в вертикальном направлении. Увеличение боковой демпфирующей силы за счет роста угла наклона путевой дорожки, ведет к уменьшению подъемной силы.
Вариант устройства магнитного подвеса в виде цилиндра, протяженного вдоль направления движения, представлен на фиг. 2. Подвес с установленными на его поверхности (4) постоянными магнитами, собранными по схеме Халбаха (3), находится внутри путевой дорожки (5). Магнитный подвес с помощью опоры (2) крепится к грузовой платформе (1) через продольный разрез в путевой дорожке. Дорожка выполнена из электропроводного немагнитного металла, например, алюминия. При движении подвеса с магнитами, собранными по схеме Халбаха, в путевой дорожке возникают индукционные токи, приводящие к появлению подъемной силы.
На фиг. 3 показан вариант магнитного подвеса, в виде треугольной призмы вытянутой вдоль путевой дорожки (5). Поверхность призмы (4) покрыта постоянными магнитами, собранными по схеме Халбаха (3). Подвес с помощью опоры (2) крепится к грузовой платформе (1).
Вариант расположения подвесов грузовой платформы (1) внутри путевой дорожки (5) представлен на фиг. 4. Поверхности двух крайних подвесов (4) покрыты постоянными магнитами по схеме Халбаха (3), а поверхность центрального подвеса покрыта магнитами по однонаправленной схеме (7). Внутри путевой дорожки может быть несколько магнитных подвесов, которые крепятся к грузовой платформе друг за другом. При этом в каждой путевой дорожке могут находиться подвесы покрытые магнитами по однонаправленной схеме, которые предназначены для ускорения платформы под действием электромагнитов путевых дорожек, при пропускании по ним импульса тока. Остальные подвесы покрыты магнитами по схеме Халбаха, которые отвечают за подъемную силу и ее равномерное распределение. На фиг. 5 приведена схема расположения электромагнитов для ускорения грузовой платформы путем воздействия их на подвесы с магнитами собранными по однонаправленной схеме. Показан вид вдоль направления движения платформы (1) при нахождении магнитных подвесов внутри электромагнитов. Два крайних магнитных подвеса расположены внутри путевых дорожек с электромагнитами (8), имеют форму треугольной призмы, поверхности которых покрыты магнитами по однонаправленной схеме (7). Для увеличения силы, ускоряющей платформу, к грузовой платформе вне путевых дорожек крепятся подвесы с магнитами собранными по однонаправленной схеме. В данном примере к платформе прикреплен, по меньшей мере, один магнитный подвес имеющий форму прямоугольной призмы, поверхность которого (4) с внутренней стороны покрыта магнитами, собранными по однонаправленной схеме (71), расположенный между (вне) путевыми дорожками. Подвес показан при прохождении его через вне путевой электромагнит (9). С помощью кабеля (10) все электромагниты последовательно соединены в одну цепь и подключаются через коммутатор к источнику питания (на чертеже не показаны), во время вхождения в их пространство подвесов с магнитами собранными по однонаправленной схеме и отключаются во время выхода подвесов из пространства электромагнитов. Когда через электромагниты проходит импульс тока в них возникает магнитное поле, которое приводит к появлению силы действующей на эти подвесы вдоль направления движения. На фиг. 6 показан вид снизу на платформу с одним из вариантов расположения на ней магнитных подвесов с магнитами собранными по схеме Халбаха (3) и по однонаправленной схеме, находящихся внутри путевых дорожек (7) и между (вне) ними (71) вместе с группой электромагнитов (8, 9). В двух трубах путевых дорожек (5) друг за другом находятся подвесы покрытые магнитами по схеме Халбаха (3), подвесы покрытые магнитами по однонаправленной схеме (7) и затем опять подвесы покрытые магнитами по схеме Халбаха (3). Такое расположение подвесов, покрытых магнитами по схеме Халбаха, позволяет равномерно распределить силы поддерживающие платформу. Между ними на грузовой платформе (1) вне путевых дорожек (5) расположен подвес с магнитами собранными по однонаправленной схеме (71), который находится на одной линии с магнитными подвесами внутри путевых дорожек, поверхность которых покрыта магнитами по однонаправленной схеме (7) и имеет одинаковую длину с ними. Такое расположение подвесов и их равенство длин необходимы, чтобы при протекании импульса тока через электромагниты (8, 9), на все подвесы с однонаправленными магнитами (7, 71) находящиеся в этот момент в их зоне влияния, действовала суммарная сила вдоль направления движения грузовой платформы. Все электромагниты последовательно подсоединены кабелем (10) к источнику питания через коммутатор (на чертеже не показаны). Форма подвеса вне путевых дорожек может отличаться от формы подвесов внутри путевых дорожек. Она выбирается исходя из получения максимума ускоряющих сил при пропускании тока через вне путевой электромагнит (9).
На фиг. 7 показан вдоль направления движения платформы (1) один из вариантов расположения труб путевых дорожек (5) с продольным разрезом внизу. Магнитные подвесы внутри путевых дорожек имеют форму треугольной призмы (4), поверхность которых покрыта постоянными магнитами по схеме Халбаха (3). Крепление платформы к магнитным подвесам внутри путевых дорожек осуществляется с помощью консольных опор (11). Такое расположение разреза позволяет исключить попадание града, камней, дождя, снега в путевую дорожку. Нижняя часть путевой дорожки крепится к железобетонным опорам (12). На рис. 8 показан вдоль направления движения платформы (1) один из вариантов расположения труб путевых дорожек (5) с продольным разрезом сбоку. Магнитные подвесы внутри путевых дорожек имеют форму треугольной призмы (4), поверхность которых покрыта постоянными магнитами по схеме Халбаха (3). Крепление платформы к магнитным подвесам внутри путевых дорожек осуществляется с помощью консольных опор (11). Такое расположение разреза позволяет уменьшить вероятность попадания посторонних предметов в путевую дорожку. Трубы установлены под небольшим углом к горизонту, что способствует удалению посторонних предметов из внутреннего пространства трубы. Нижняя часть путевой дорожки крепится к железобетонным опорам (12).
Длина магнитных подвесов, собранных по однонаправленной схеме, определяется с учетом максимальной скорости платформы и длительности импульса тока через электромагниты. Размеры подвесов, с поверхностями покрытыми магнитами по схеме Халбаха, зазоров между его поверхностями и путевой дорожкой, определяют исходя из веса груза, мощности требуемой для преодоления сил электродинамического торможения и необходимых демпфирующих усилий при движении. На основании теоретической работы [4] сделана оценка некоторых размеров магнитных подвесов грузовой платформы, зазоров между подвесами и путевой дорожкой, а также возможных демпфирующих сил. Для простоты расчета рассмотрен вариант магнитных подвесов в виде треугольной призмы с углом 45° между нижней и боковыми гранями. Эта форма подвесов ближе всего к прототипу изобретения [2]. Магниты сделаны из сплава неодим-железо-бор. Подвесы находятся в двух параллельных путевых дорожках. В каждой путевой дорожке расположены два подвеса, поверхность которых покрыта магнитами по схеме Халбаха. Все четыре магнитных подвеса крепятся к грузовой платформе. Ширина верхнего разреза путевой дорожки принята равной 80 мм, а толщина опоры 30 мм. Как вариант рассмотрена конструкция подвесов для подъемной силы в 70 кН. Расчеты показывают, что подъемная сила в 70 кН четырех подвесов с магнитами собранными по схеме Халбаха достигается при скорости 3 м/с, длине каждого подвеса 1 м, ширине нижней грани 0,35 м и зазорах между плоскостями подвесов и путевой дорожкой равных 10 мм для нижних граней и по 42 мм для верхних граней. При скорости платформы 50 м/с, зазор между плоскостями подвесов и путевыми дорожками становится равным 20 мм для нижних граней и 35 мм для верхних граней. При таких зазорах сила, действующая на нижние грани и направленная вверх составляет 110 кН, а сила, действующая на верхние грани и направленная вниз составляет 40 кН. С дальнейшим ростом скорости эти силы и зазоры практически не меняются. Демпфирующая сила, препятствующая отклонению платформы в направлении перпендикулярном направлению движения, при смещении подвесов из этого положения на 25 мм вверх, составит 100 кН, а при смещении в боковом направлении на это же расстояние составит 50 кН. Длина подвеса в направлении движения (L), с поверхностью покрытой однонаправленными магнитами, скорость движения V и длительность импульса тока t через электромагниты, связаны формулой L=V*t. При длине подвеса с однонаправленными магнитами, отвечающего за создание тягового усилия, равной 1 м, длительность импульса тока через электромагниты изменяется от 0.5 с до 0.001 с при изменении скорости от 2 м/с до 1000 м/с. Такие длительности импульсов могут быть получены при разряде блоков конденсаторов, как источников питания. При скорости 2 м/с сила электродинамического торможения всех подвесов достигает 110 кН, уменьшаясь до 30 кН при 50 м/с. Вклад в силу электродинамического торможения магнитов отвечающих за демпфирование перемещения подвесов в направлении перпендикулярном движению при V≥50 м/с составляет 35%, а магнитов отвечающих за подъемную силу 65%. Это соотношение можно изменять, покрывая магнитами только часть поверхности верхних граней. При скорости 150 м/с сила электродинамического торможения составляет ~16 кН. Сила электродинамического торможения убывает с ростом скорости движения пропорционально ~1/√V [5, 6]. При скорости 300 м/с в приведенном примере она может составлять ~13 кН и ~8 кН при скорости 1000 м/с. Для преодоления сил электродинамического торможения мощность тягового двигателя должна быть не менее 8 Мвт при скорости 1000 м/с.
Ссылки:
1. Halbach K. Applications of permanent magnets in accelerators and electron rings. Journal of Applied Physics. 1985, vol. 57, p. 3605.
2. Патент US 8578860, заявлен 07.03.2013, опубликован 12.11.2013, заявитель Richard F. Post. Inductrack 3 configuration a maglev system for high loads.
3. Патент US 5722326, заявлен 01.08.1998, опубликован 03.03.1998, заявитель Richard F. Post. Magnetic levitation system for moving objects.
4. Амосков B.M., Арсланова Д.Н., Базаров A.M. и др. Численное моделирование электродинамических подвесов левитационных транспортных систем с непрерывной путевой структурой. Вестник Санкт-Петербургского университета. Сер. 10. Прикладная математика. 2015. Вып. 3. С. 4-20.
5. Saslow W.M. Maxwell's theory of eddy currents in thin conducting sheets, and applications to electromagnetic shielding and MAGLEV. American Journal of Physics. 1992, vol. 60, p. 693.
6. Князев Б.А., Котельников И.А., Тютин A.A., Черкасский B.C. Торможение магнитного диполя, движущегося с произвольной скоростью в проводящей трубе. Успехи физических наук. 2006, том. 179, №9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство магнитной системы левитации для устойчивого высокоскоростного перемещения грузов | 2019 |
|
RU2722765C1 |
| Устройство магнитной системы левитации для повышения грузоподъёмности | 2020 |
|
RU2752040C1 |
| Устройство перемещения по путепроводу транспорта с магнитной левитацией для повышения грузоподъёмности | 2021 |
|
RU2761150C1 |
| Устройство магнитной левитации на постоянных магнитах | 2020 |
|
RU2743104C1 |
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ КОМБИНИРОВАННОГО ПУТЕПРОВОДА | 2014 |
|
RU2573135C1 |
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
| Устройство токоприёмника высокоскоростного рельсового транспорта | 2022 |
|
RU2788213C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2739939C1 |
| Магнитолевитационное транспортное средство | 2019 |
|
RU2724030C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ КОМБИНИРОВАННОГО ПОДВЕСА И ВЫСОКОСКОРОСТНОЙ МАГНИТОЛЕВИТАЦИОННЫЙ ТРАНСПОРТ С КОМБИНИРОВАННЫМ ПОДВЕСОМ, ФУНКЦИОНИРУЮЩИМ В СООТВЕТСТВИИ С ТАКИМ СПОСОБОМ | 2022 |
|
RU2782389C1 |
Изобретение относится к высокоскоростному транспорту на основе индукционной магнитной левитации на постоянных магнитах. Устройство состоит из магнитных подвесов, прикрепленных к грузовой платформе, и не менее двух путевых дорожек, в которых при перемещении магнитных подвесов возникают индукционные токи, приводящие к левитации подвесов. Магнитные подвесы имеют форму цилиндра или многогранной призмы, находящихся внутри путевых дорожек. Поверхности подвесов покрыты постоянными магнитами, собранными по схеме Халбаха. Подвесы предназначены для создания подъемной и демпфирующей сил. Путевые дорожки представляют собой трубы из электропроводного немагнитного материала с продольным разрезом для перемещения опор с магнитными подвесами грузовой платформы. В путевых дорожках могут находиться магнитные подвесы и с магнитами, собранными по однонаправленной схеме, где поле магнитов направлено вдоль или перпендикулярно направлению движения магнитных подвесов. На грузовой платформе вне путевых дорожек установлен по меньшей мере один магнитный подвес с магнитами, собранными по однонаправленной схеме. Магнитные подвесы с магнитами, собранными по однонаправленной схеме, предназначены для создания тяговых усилий с помощью электромагнитов. В результате повышается устойчивость грузовой платформы на высоких скоростях движения за счет создания больших демпфирующих сил против перемещения платформы в направлениях, перпендикулярных движению. 4 з.п. ф-лы, 8 ил.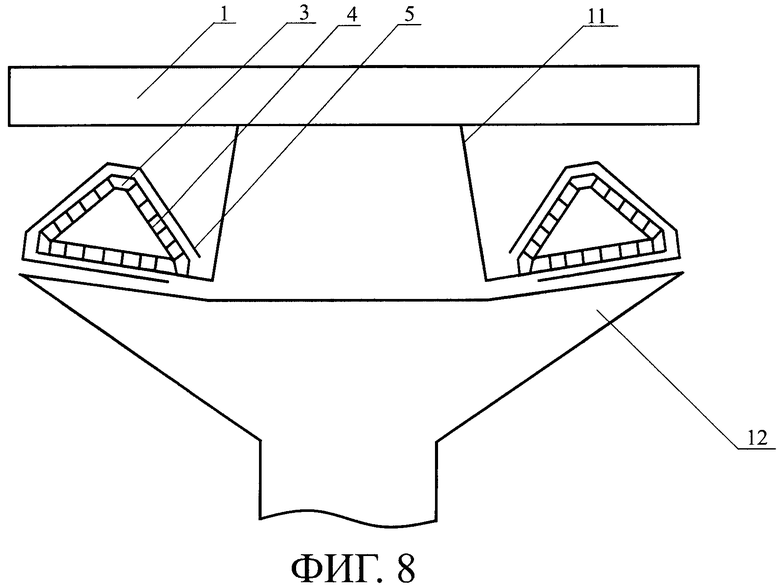
1. Устройство магнитной системы левитации для устойчивого высокоскоростного перемещения грузов, состоящее из прикрепленных посредством опор к грузовой платформе магнитных подвесов с постоянными магнитами и путевых дорожек, внутри которых при движении грузовой платформы перемещаются магнитные подвесы с образованием индукционных токов, причем магнитные подвесы имеют форму цилиндра или многогранной призмы, протяженных вдоль направления движения, поверхности подвесов покрыты постоянными магнитами, собранными по схеме Халбаха, путевыми дорожками служат параллельные трубы из электропроводного немагнитного материала с продольным разрезом для перемещения внутри указанных труб магнитных подвесов грузовой платформы, причем внутренняя поверхность трубы каждой путевой дорожки в сечении повторяет контуры сечения поверхности магнитных подвесов, на грузовой платформе установлен по меньшей мере один магнитный подвес вне путевых дорожек с магнитами, собранными по однонаправленной схеме, где поле магнитов направлено вдоль или перпендикулярно направлению движения магнитных подвесов.
2. Устройство по п. 1, отличающееся тем, что магнитные подвесы внутри путевых дорожек имеют форму многогранных призм, а вне путевых дорожек - форму цилиндров, или внутри путевых дорожек имеют форму цилиндров, а вне путевых дорожек - форму многогранных призм, или указанные призмы магнитных подвесов внутри и вне путевых дорожек имеют в основании разные виды многоугольников, или указанные цилиндры магнитных подвесов внутри и вне путевых дорожек имеют основание разной формы.
3. Устройство по п. 1, отличающееся тем, что снабжено дополнительно магнитными подвесами, поверхности которых покрыты постоянными магнитами по однонаправленной схеме, которые перемещаются внутри путевых дорожек.
4. Устройство по п. 1, отличающееся тем, что труба путевой дорожки состоит из электрически изолированных друг от друга отрезков труб, выполненных таким образом, чтобы обеспечить протекание по некоторым из них тока с образованием электромагнитов с магнитным полем, перпендикулярным направлению движения магнитных подвесов.
5. Устройство по п. 4, отличающееся тем, что не менее одного аналогичного электромагнита размещено вне путевых дорожек, на одной линии с электромагнитами путевых дорожек, соединенного с ними последовательно электрическим кабелем.
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ КОМБИНИРОВАННОГО ПУТЕПРОВОДА | 2014 |
|
RU2573135C1 |
| US 8578860 B2, 12.11.2013 | |||
| US 9604798 B2, 28.03.2017 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

