Изобретение относится к области магнитолевитационной транспортной технологии, а именно к конструкции устройства магнитной левитации и поперечной стабилизации на постоянных магнитах
Для оценки новизны заявленного решения рассмотрим ряд известных технических средств аналогичного назначения, характеризуемых совокупностью сходных с заявленным устройством признаков.
Известна транспортная система по патенту РФ №2643900, содержащая грузовую магнитолевитационную транспортную платформу и активную путевую структуру, при этом грузовая магнитолевитационная транспортная платформа содержит типовую фитинговую платформу, установленную на двух несущих тележках, каждый магнитный модуль левитации состоит из бортового и путевого магнитных полюсов левитации, причем путевой магнитный полюс установлен на активной путевой структуре, а бортовой магнитный полюс прикреплен к несущей тележке, при этом на несущих тележках установлено четыре магнитных полюса левитации - по два на каждую тележку, кроме того, транспортная платформа снабжена тяговым линейным электродвигателем, выполненным в виде линейного синхронного двигателя со сверхпроводниковой обмоткой возбуждения и системой питания, статор которого уложен вдоль активной путевой структуры.
Известно устройство магнитной левитации и поперечной стабилизации транспортного средства на постоянных магнитах по патенту РФ №2683122, которое содержит транспортный путь в виде канала, на боковых стенах канала установлены магниты в виде «массива Хальбаха», вдоль пути на всем протяжении, статор линейного двигателя, левитирующую платформу, которая в свою очередь содержит постоянный магнит в виде «массива Хальбаха», установленный на боковых стенах платформы, постоянные магниты ротора линейного двигателя, отличается тем, что бортовой магнит шире постоянного магнита, установленного на транспортном пути, и бортовой магнит закруглен с двух сторон в центр левитирующей платформы, может иметь замкнутую форму в виде ноля или восьмерки.
Данное техническое решение, как наиболее близкое к заявленному по техническому существу и достигаемому результату, принято в качестве его прототипа. Данная система обеспечивает левитацию транспортного средства без электрического тока как на стоянке, так и при движении на скорости.
Недостатками данного технического решения является необходимость установки большого количества магнитов на 1 п.м. пути и на борту транспортного средства. Встречно установленные массивы Хальбаха препятствуют возникновению устойчивой левитации, которая в данном случае достигается путем применения физических ограничителей (напр. боковых колес), не позволяющих противоположным полюсам массивов Хальбаха при магнититься друг к другу, кроме того в прототипе не учтены вертикальные колебания транспортного средства в зависимости от нагрузки и динамики.
Недостатки прототипа и других известных транспортных систем сводятся к следующему:
а) в транспортных системах с применением электромагнитов:
- высокие затраты электроэнергии;
- высокая точность строительно-монтажных работ из-за малых зазоров между путем и подвижным составом;
- высокие требования к контролю левитационного зазора;
- высокие требования к безотказности работы системы поддержания левитационного зазора и бесперебойности электроснабжения.
б) в транспортных системах с применением сверхпроводниковой технологии:
- высокая стоимость изготовления и эксплуатации сверхпроводниковых катушек;
- необходимость применения специальной зашиты живых организмов и грузов от воздействия магнитных полей высокой индукции;
- высокие затраты электроэнергии;
- отсутствие левитации при низких скоростях движения.
Задачей изобретения является разработка конструкции стабильного магнитного подвеса магнитолевитационного транспортного средства, а именно, конструкции комбинированного устройства магнитной левитации и поперечной стабилизации на постоянных магнитах на основании создания магнитных полей требуемой формы, обеспечивающей устойчивый бесконтактный подвес транспортного средства.
Сущность заявленного технического решения выражается в следующей совокупности существенных признаков, достаточной для решения указанной заявителем технической проблемы и получения, обеспечиваемого изобретением технического результата.
Согласно изобретению магнитолевитационное транспортное средство, включающее магнитную систему в виде совокупности постоянных магнитов, характеризуется тем, что совокупность магнитов выполнена в виде двух магнитно взаимосвязанных магнитных систем, при этом первая магнитная система состоит из двух аксиально намагниченных магнитов с диагональным расположением полюсов, при этом оба магнита жестко соединены между собой, а вторая магнитная система выполнена в виде двух сборок магнитов, жестко закрепленных между собой, при чем каждая сборка состоят из трех аксиально намагниченных магнитов, а именно, двух боковых с нормальным расположением полюсов и одного центрального магнита с диагональным расположением полюсов, причем магниты второй магнитной системы расположены друг относительно друга и относительно магнитов первой магнитной системы таким образом, что центральные магниты второй магнитной системы с диагональным расположением полюсов обращены к магнитам первой магнитной системы одноименными с ними полюсами, а боковые магниты второй магнитной системы с нормальным расположением полюсов размещены таким образом, что снаружи и внутри образовавшегося между ними угла находятся стороны магнитов с одноименными полюсами, при этом крайняя точка полюса магнита первой магнитной системы, обращенная в сторону второй магнитной системы, расположена в углу, образованном одноименными полюсами боковых магнитов второй магнитной системы, и расположена от вершины этого угла на расстоянии, обеспечивающем левитационное и стабилизирующее усилия, воздействующие на первую магнитную систему, достаточные для ее стабильного положения в пространстве и для надежной работы магнитолевитационного транспортного средства.
Кроме того, заявленное техническое решение характеризуется наличием ряда дополнительных факультативных признаков, а именно:
- первая магнитная система может быть неподвижно закреплена на дорожном полотне, а вторая магнитная система - на транспортном средстве;
- первая магнитная система может быть неподвижно закреплена на транспортном средстве, а вторая магнитная система - на дорожном полотне;
- первая магнитная система транспортного средства может быть снабжена дополнительным аксиально намагниченным магнитом с диагональным расположением полюсов, при этом все магниты первой магнитной системы жестко соединены между собой с образованием геометрической фигуры в плане, при этом вторая магнитная система снабжена дополнительной сборкой из трех жестко закрепленных между собой аксиально намагниченных магнитов, двух боковых с нормальным расположением полюсов и одного центрального магнита с диагональным расположением полюсов, при этом дополнительная сборка магнитов второй магнитной системы части расположена относительно дополнительных магнитов первой магнитной системы аналогично вышеуказанному.
Заявленная совокупность существенных признаков обеспечивает достижение технического результата, который заключается в том, что заявленное выполнение и взаимное расположение постоянных магнитов двух взаимодействующих между собой магнитных систем обеспечивает новый принцип конфигурирования магнитных полей требуемой формы, обеспечивающий устойчивое взаимодействие и бесконтактное расположения постоянных магнитов двух магнитных систем магнитолевитационного транспортного средства в пространстве друг относительно друга.
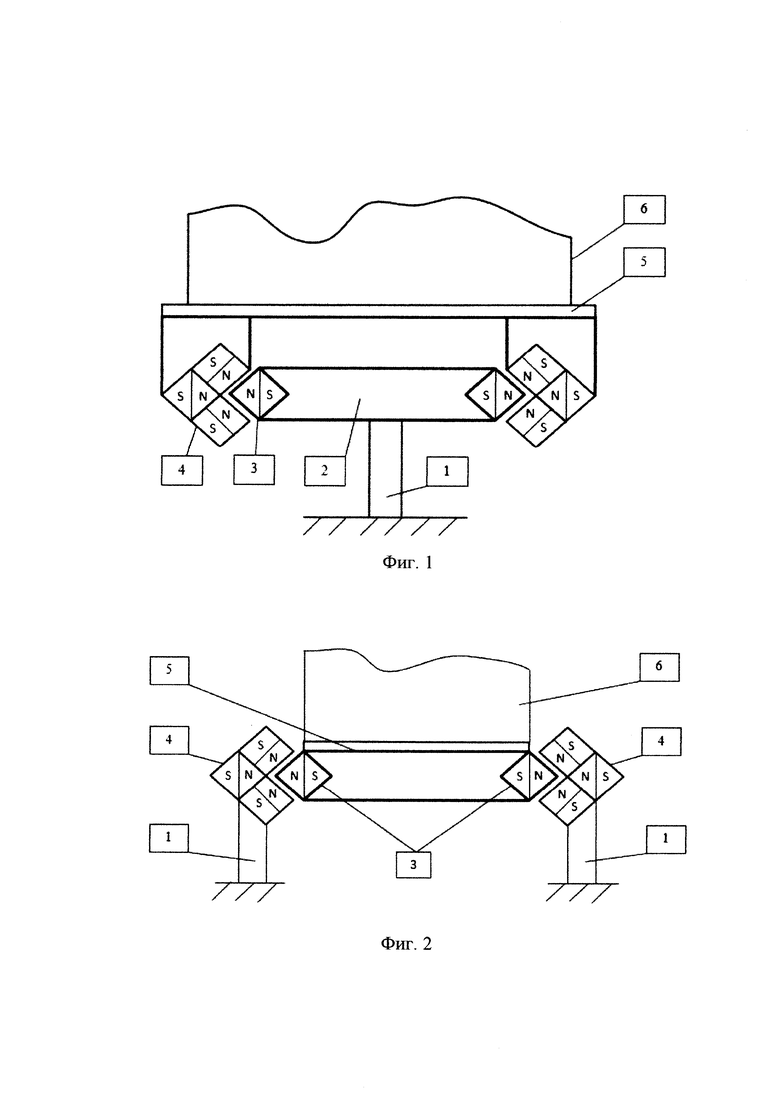
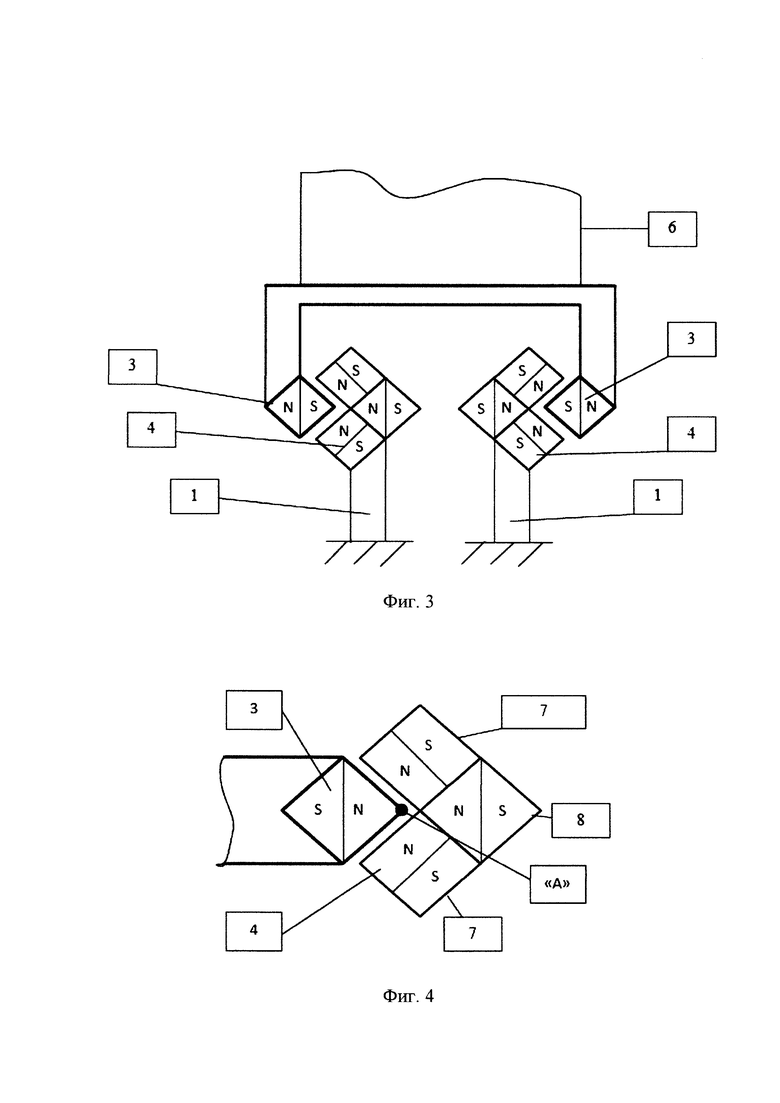
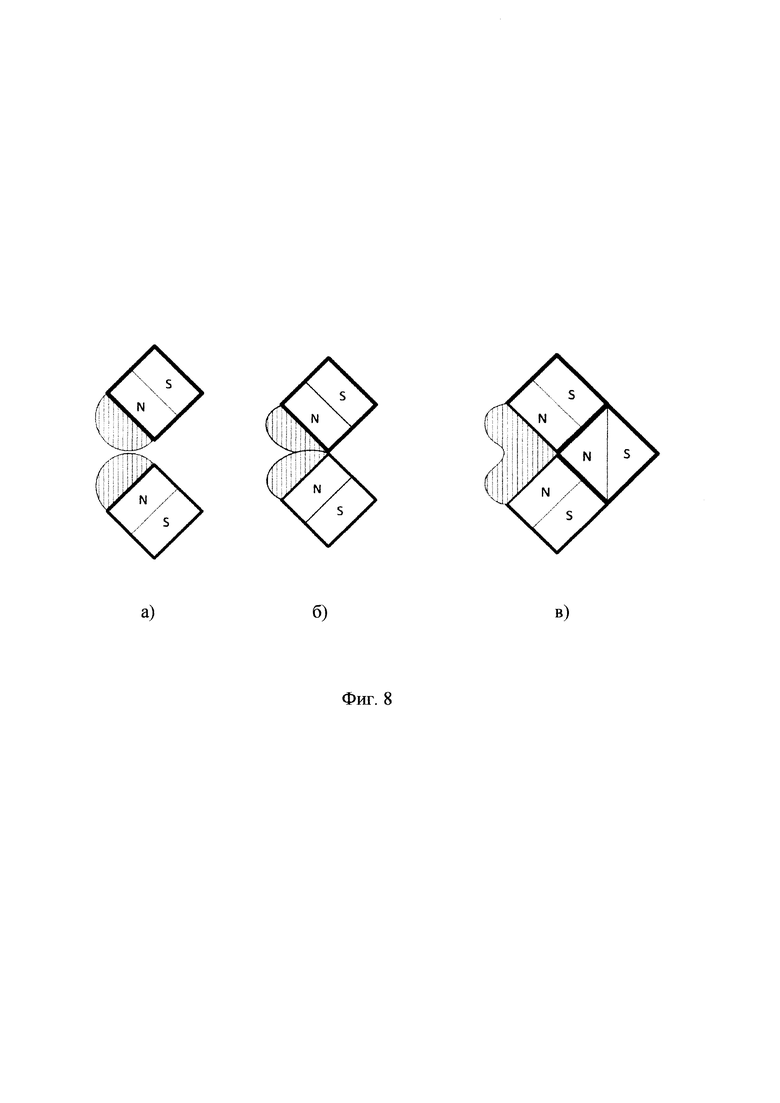
Сущность заявляемого технического решения поясняется чертежом, на котором на фиг. 1 представлена блок-схема магнитной системы магнитолевитационного транспортного средства, в которой первая магнитная система неподвижно закреплена на дорожном полотне, а вторая магнитная система закреплена на транспортном средстве, на фиг. 2 - блок-схема магнитной системы магнитолевитационного транспортного средства, в которой первая магнитная система неподвижно закреплена на транспортном средстве, а вторая магнитная система закреплена на дорожном полотне., на фиг. 3 - один из возможных вариантов взаимного расположения первой и второй магнитных систем, на фиг. 4 - схема взаимодействия первой и второй магнитных систем, на фиг. 5 - расположение первой и второй магнитных систем, обеспечивающей устойчивое положение магнитолевитационного транспортного средства, на фиг. 6 - возможные варианты выполнения первой и второй магнитных систем магнитолевитационного транспортного средства, на фиг. 7 - варианты взаимного расположения первой магнитной системы, неподвижно закрепленной на дорожном полотне, и второй магнитной системы неподвижно закрепленной на транспортном средстве, на фиг. 8 - варианты конфигураций магнитных полей постоянных магнитов, где а - отдельно стоящие аксиально намагниченные магниты с нормальным расположением полюсов; б - сведенные аксиально намагниченные магниты с нормальным расположением полюсов с отсутствием целостности линии равного потенциала магнитного поля; в - сведенные аксиально намагниченные магниты с нормальным расположением полюсов и центральный магнит с диагональным расположением полюсов с ярко выраженным присутствием целостной линии равного потенциала магнитного поля
На чертежах позициями обозначены: 1 - опорная часть путевой структуры, 2 - путевая структура, 3 - магниты первой магнитной системы, 4 - вторая магнитная система, 5 - опорная платформа, 6 - кузов транспортного средства, 7 - боковые магниты аксиальной намагниченности второй магнитной системы с нормальным расположением полюсов, 8 - центральные магниты аксиальной намагниченности второй магнитной системы с диагональным расположением полюсов
Заявленное магнитолевитационное транспортное средство имеет магнитную систему в виде двух магнитно взаимосвязанных магнитных систем.. Первая магнитная система состоит из двух аксиально намагниченных магнитов 3 с диагональным расположением полюсов, в которых линия нейтральной намагниченности проходит от одной грани к диагонально противоположной, при этом оба магнита 3 жестко соединены между собой и расположены так, что линии намагничивания правого и левого магнитов 3 являются продолжением друг друга. Вторая магнитная система 4 выполнена в виде двух сборок магнитов, жестко закрепленных между собой, при чем каждая сборка состоят из трех аксиально намагниченных магнитов 7, двух боковых с нормальным расположением полюсов и одного центрального магнита 8 с диагональным расположением полюсов. Магниты второй магнитной системы 4 расположены друг относительно друга и относительно магнитов 3 первой магнитной системы таким образом, что центральные магниты 8 второй магнитной системы с диагональным расположением полюсов обращены к магнитам 3 первой магнитной системы 3 одноименными с ними полюсами, а боковые магниты 7 второй магнитной системы 4 с нормальным расположением полюсов размещены таким образом, что снаружи и внутри образовавшегося между ними угла находились стороны магнитов с одноименными полюсами.
Заявленное магнитолевитационное транспортное средство работает следующим образом.
Принцип работы магнитной системы магнитолевитационного транспортного средства основан на формировании магнитных полей сборок постоянных или намагниченных магнитов, как показано на фиг. 8, из которой видно, что в варианте «в» сведенные аксиально намагниченные магниты с нормальным расположением полюсов и центральный магнит с диагональным расположением полюсов образуют магнитное поле с ярко выраженным присутствием целостной линии равного потенциала, что и является основой для обеспечения работоспособности магнитной системы в целом.
Магнитная система заявленного магнитолевитационного транспортного средства может быть выполнена в нескольких варианта, два из которых показаны на фиг. 1 и фиг. 2. В варианте, представленном на фиг. 1, вторая магнитная система 4 расположена непосредственно на перемещающемся магнитолевитационном транспортном средстве, а взаимодействующая с ней первая магнитная система 3 установлена на опорной части 1 путевой структуры 2. Кузов транспортного средства 6 установлен на опорную платформу 5. В варианте, представленном на фиг. 2, первая магнитная система 3 расположена непосредственно на перемещающемся магнитолевитационном транспортном средстве, а взаимодействующая с ней вторая магнитная система 4 установлена на опорной части 1 путевой структуры 2.
Для обеспечения работоспособности системы должны соблюдаться следующие условия:
1. Постоянные магниты 3 и 8 должны находиться одноименными полюсами друг напротив друга;
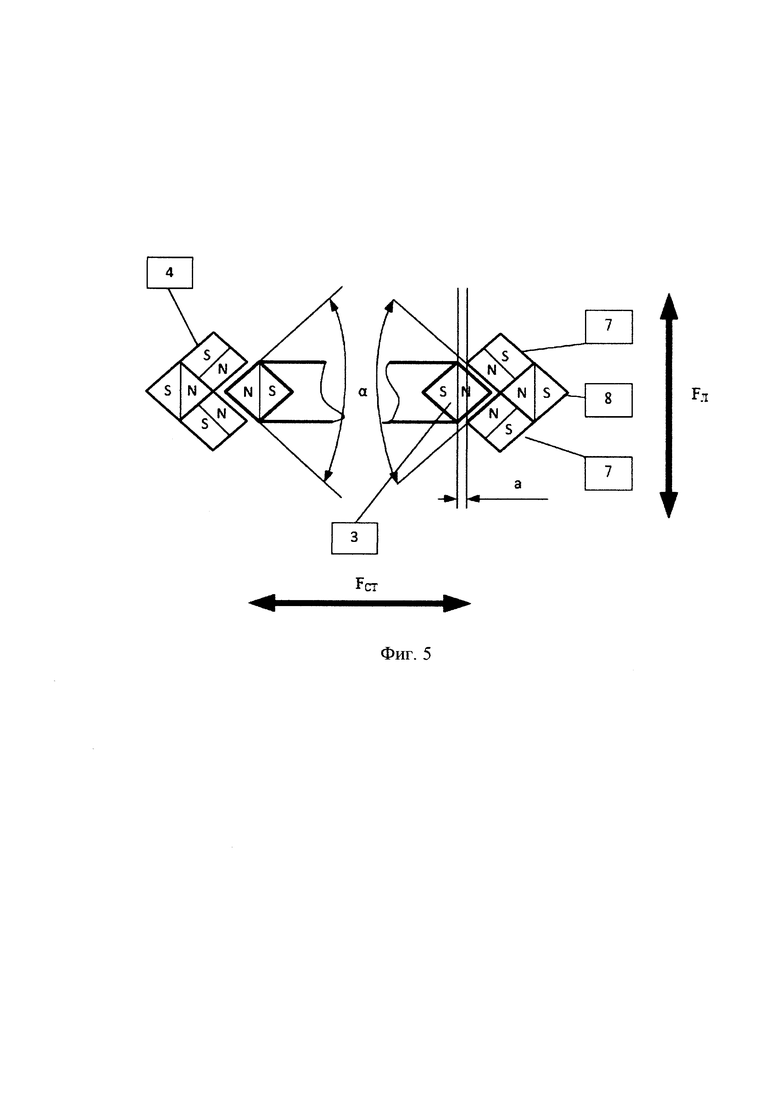
2. Расстояние «а» на фиг. 5 должно быть больше 0 (а>0);
3. Геометрические размеры постоянных магнитов, а также материал постоянных магнитов не оказывают влияния на работоспособность системы. Углы α (фиг. 3) могут находиться в диапазоне от 0° до 180°.
4. В зависимости от заданного угла а заявленная магнитная система может работать в трех режимах:
1) При α=90° сила левитации равна силе стабилизации (Fл=Fст);
2) При α>90° сила левитации меньше силы стабилизации (Fл<Fст). Система может применяться как устройство дополнительной поперечной стабилизации магнитолевитационного транспортного средства;
3) При α<90° сила левитации больше силы стабилизации (Fл>Fст). Система может применяться как устройство дополнительной вертикальной удерживающей силы магнитолевитационного транспортного средства.
5. Критическими углами в рассматриваемых случае являются: α=0° и α=180°
Рассматриваемая система устойчива при соблюдении условия нахождения крайней точки полюса магнита первой магнитной системы 3 (точка «А» на фиг. 4), обращенной в сторону второй магнитной системы 4, в углу, образованном одноименными полюсами боковых магнитов 7 второй магнитной системы 4, и расположена от вершины этого угла на расстоянии, обеспечивающем левитационное и стабилизирующее усилия, воздействующие на первую магнитную систему, достаточные для ее стабильного положения в пространстве и для надежной работы магнитолевитационного транспортного средства. При удалении точки «А» от указанного положения система теряет устойчивость.
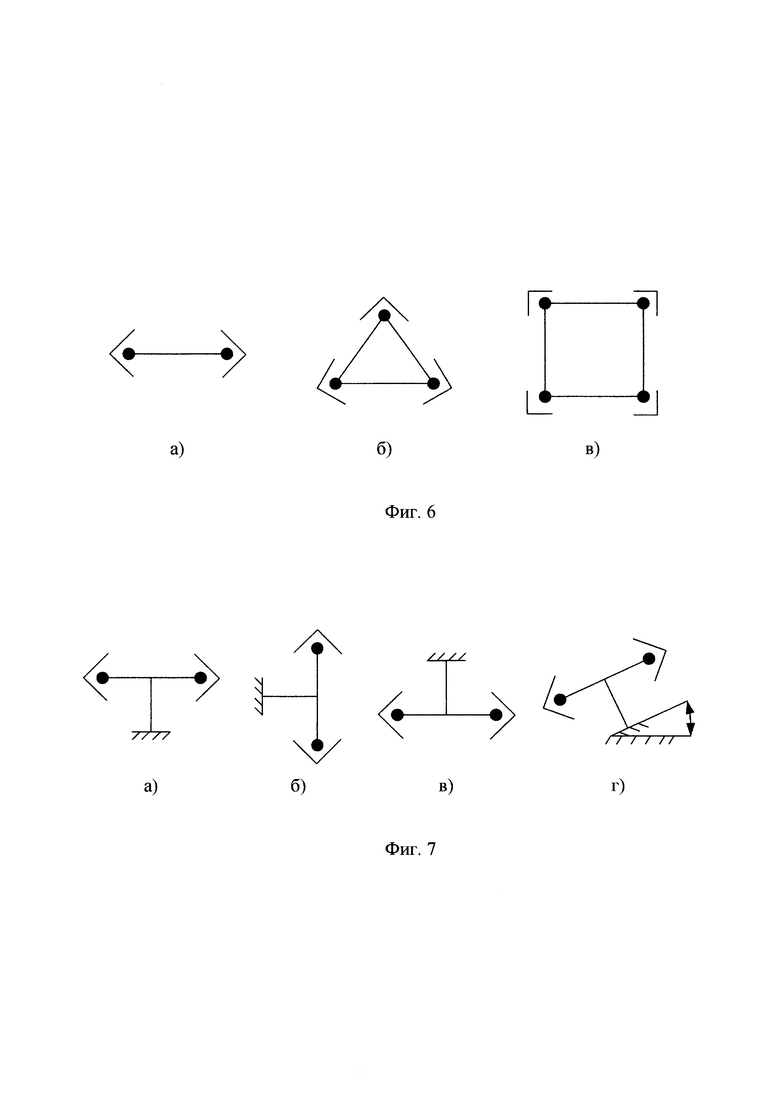
Точек взаимодействия первой и второй магнитных систем магнитолевитационного транспортного средства может быть от двух и более, как показано на фиг 6 (а, б, в), кроме того эти магнитные системы могут иметь различные варианты исполнения в зависимости от расположения неподвижной путевой структуры, как показано на фиг. 7 (а, б, в, г), но общие принципы организации магнитного взаимодействия магнитных систем частей заиленного магнитолевитационного транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитный подшипник | 2019 |
|
RU2724913C1 |
| МАГНИТОЛЕВИТАЦИОННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2680880C1 |
| Устройство динамической стабилизации магнитолевитационного транспортного средства | 2017 |
|
RU2651786C1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД МАГНИТОЛЕВИТАЦИОННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2651787C1 |
| Устройство магнитной левитации на постоянных магнитах | 2020 |
|
RU2743104C1 |
| СИСТЕМА ОХЛАЖДЕНИЯ ВАКУУМНОГО ТРУБОПРОВОДА МАГНИТОЛЕВИТАЦИОННОГО ТРАНСПОРТА | 2018 |
|
RU2681763C1 |
| Транспортная система | 2016 |
|
RU2643900C1 |
| МАГНИТНЫЙ ПОЛЮС ИЗ ОБЪЕМНЫХ ВЫСОКОТЕМПЕРАТУРНЫХ СВЕРХПРОВОДНИКОВ МАГНИТОЛЕВИТАЦИОННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2573431C1 |
| Система магнитной левитации и боковой стабилизации магнитолевитационного транспортного средства | 2016 |
|
RU2647784C1 |
| МАГНИТНЫЙ ПОЛЮС ИЗ ПОСТОЯННЫХ МАГНИТОВ НА БАЗЕ РЕДКОЗЕМЕЛЬНЫХ МЕТАЛЛОВ МАГНИТОЛЕВИТАЦИОННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2619485C1 |
Изобретение относится к области магнитолевитационного транспорта. Первая магнитная система состоит из двух аксиально намагниченных магнитов с диагональным расположением полюсов, при этом оба магнита жестко соединены между собой. Вторая магнитная система выполнена в виде двух сборок магнитов, жестко закрепленных между собой. Каждая сборка состоит из трех аксиально намагниченных магнитов - двух боковых с нормальным расположением полюсов и одного центрального магнита с диагональным расположением полюсов. Центральные магниты второй магнитной системы с диагональным расположением полюсов обращены к магнитам первой магнитной системы одноименными с ними полюсами. Боковые магниты второй магнитной системы с нормальным расположением полюсов размещены таким образом, что снаружи и внутри образовавшегося между ними угла находятся стороны магнитов с одноименными полюсами. Крайняя точка полюса магнита первой магнитной системы, обращенная в сторону второй магнитной системы, расположена в углу, образованном одноименными полюсами боковых магнитов второй магнитной системы. Достигается новый принцип конфигурирования магнитных полей требуемой формы, обеспечивающий устойчивое взаимодействие и бесконтактное расположение постоянных магнитов двух магнитных систем в пространстве относительно друг друга. 3 з.п. ф-лы, 15 ил.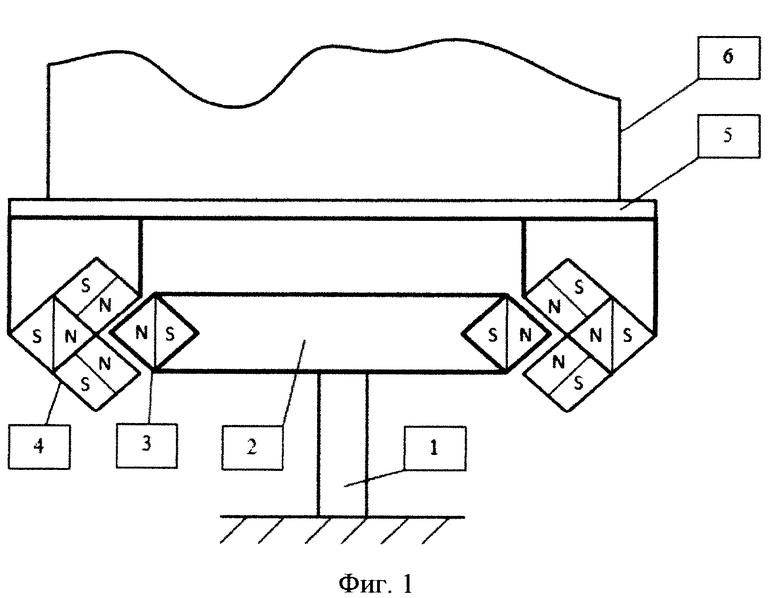
1. Магнитолевитационное транспортное средство, включающее магнитную систему в виде совокупности постоянных магнитов, отличающееся тем, что совокупность магнитов выполнена в виде двух магнитно взаимосвязанных магнитных систем, при этом первая магнитная система состоит из двух аксиально намагниченных магнитов с диагональным расположением полюсов, при этом оба магнита жестко соединены между собой, а вторая магнитная система выполнена в виде двух сборок магнитов, жестко закрепленных между собой, причем каждая сборка состоят из трех аксиально намагниченных магнитов, а именно двух боковых с нормальным расположением полюсов и одного центрального магнита с диагональным расположением полюсов, причем магниты второй магнитной системы расположены друг относительно друга и относительно магнитов первой магнитной системы таким образом, что центральные магниты второй магнитной системы с диагональным расположением полюсов обращены к магнитам первой магнитной системы одноименными с ними полюсами, а боковые магниты второй магнитной системы с нормальным расположением полюсов размещены таким образом, что снаружи и внутри образовавшегося между ними угла находятся стороны магнитов с одноименными полюсами, при этом крайняя точка полюса магнита первой магнитной системы, обращенная в сторону второй магнитной системы, расположена в углу, образованном одноименными полюсами боковых магнитов второй магнитной системы, и расположена от вершины этого угла на расстоянии, обеспечивающем левитационное и стабилизирующее усилия, воздействующие на первую магнитную систему, достаточные для ее стабильного положения в пространстве и для надежной работы магнитолевитационного транспортного средства.
2. Транспортное средство по п. 1, отличающееся тем, что первая внутренняя магнитная система неподвижно закреплена на дорожном полотне, а вторая магнитная система - на транспортном средстве.
3. Транспортное средство по п. 1, отличающееся тем, что первая магнитная система неподвижно закреплена на транспортном средстве, а вторая магнитная система - на дорожном полотне.
4. Транспортное средство по п. 1, отличающееся тем, что первая магнитная система транспортного средства снабжена дополнительным аксиально намагниченным магнитом с диагональным расположением полюсов, при этом все магниты первой магнитной системы жестко соединены между собой с образованием геометрической фигуры в плане, при этом вторая магнитная система снабжена дополнительной сборкой из трех жестко закрепленных между собой аксиально намагниченных магнитов, двух боковых с нормальным расположением полюсов и одного центрального магнита с диагональным расположением полюсов, при этом дополнительная сборка магнитов второй магнитной системы части расположена относительно дополнительных магнитов первой магнитной системы аналогично вышеуказанному.
| УСТРОЙСТВО МАГНИТНОЙ ЛЕВИТАЦИИ И ПОПЕРЕЧНОЙ СТАБИЛИЗАЦИИ НА ПОСТОЯННЫХ МАГНИТАХ | 2018 |
|
RU2683122C1 |
| МАГНИТНЫЙ ПОЛЮС ИЗ ОБЪЕМНЫХ ВЫСОКОТЕМПЕРАТУРНЫХ СВЕРХПРОВОДНИКОВ МАГНИТОЛЕВИТАЦИОННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2573431C1 |
| CN 101734170 A, 16.06.2010 | |||
| US 5319275 A, 07.06.1994. | |||

