Данные о родственной заявке
Настоящая заявка испрашивает приоритет предварительной заявки США №61/989136, поданной 6 мая 2014 г., предмет рассмотрения которой полностью включен в данный документ посредством ссылки.
Предпосылки создания изобретения
Область изобретения
Аспекты и варианты осуществления изобретения в наиболее общем смысле направлены на систему оптической съемки, способам, относящимся к ней, и к ее применениям; конкретнее, на систему панорамной оптической съемки, способам, относящимся к ней, и к ее применению; и, в особенности, на систему панорамной оптической съемки, которая имеет нулевой параллакс или по существу не имеет его, способам, относящимся к ней, и ее к применениям.
Описание предшествующего уровня техники
Текущие 360-градусные системы без параллакса используют компоновку из зеркал для сканирования изображения и их частота съемки ограничена 10 кадрами в секунду (к/с). Компания Google использует 360-градусную камеру с рефракционными линзами, разработанными компанией Immersive Media, для захвата фотоизображений для своего программного обеспечения Streetview. Фотоизображения должны быть постобработаны и должна быть сделана поправка на параллакс, для чего требуется время, что снижает способность компании Google масштабировать свои проекты Streetview. Объективы типа "рыбий глаз" предоставляют широкоугольную съемку, но за счет высокого искажения. Искажение является результатом физического наложения большого сферического объекта на небольшую плоскую плоскость изображения.
Некоторые компании разработали оптические системы для упрощения процесса захвата панорамного изображения. Вместо того, чтобы поворачивать камеру для получения множества снимков, все фотоизображения захватываются одновременно многочисленными камерами, снимающими различные части сцены. Компании Immersive Media и Greypoint Imaging разработали 360-градусные камеры, снимающие одним снимком, которые доступны по различным ценам от $10000 до $100000. Обе компании разработали программное обеспечение для автоматической поправки на артефакты (параллакс), создаваемые в изображении, и предложения лучшего решения, чем панорамы, захватываемые одной камерой, например, камерой iPhone. Тем не менее, программное обеспечение не является совершенным и многочисленные артефакты все еще присутствуют в изображениях. Как показывает опыт, после того, как один человек использовал камеру Dodeca 360 (предложенную компанией Immersive Media) для съемки Большого каньона, компании Google пришлось нанимать программистов для поправки изображений кадр за кадром на артефакты, вызванные параллаксом.
Параллакс и центральные лучи оптической системы
Параллакс определяется как "эффект, посредством которого положение или направление объекта кажется отличным при рассмотрении с различных положений, например, через видоискатель и объектив камеры". Параллакс создается в результате совмещения изображений со множества камер со своими собственными уникальными перспективами окружающего мира.
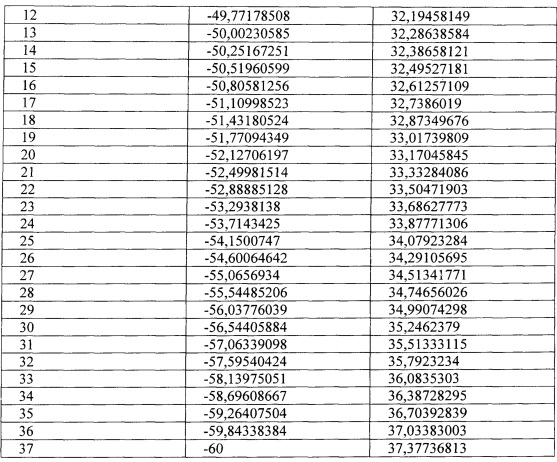
Ссылаясь на фиг. 1, центральный луч оптической системы является меридиональным лучом, который начинается на кромке объекта, пересекает центр оптической оси на апертурной диафрагме и заканчивается на кромке изображения на детекторе. Таким образом, центральный луч определяет размер изображения.
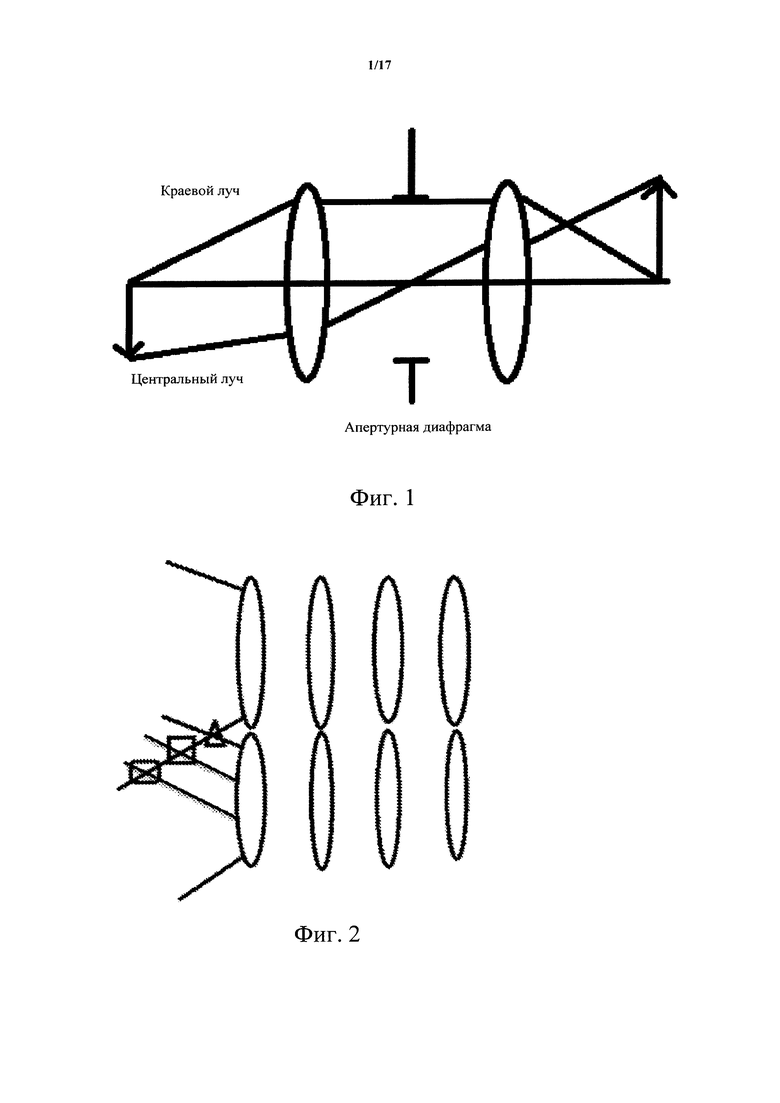
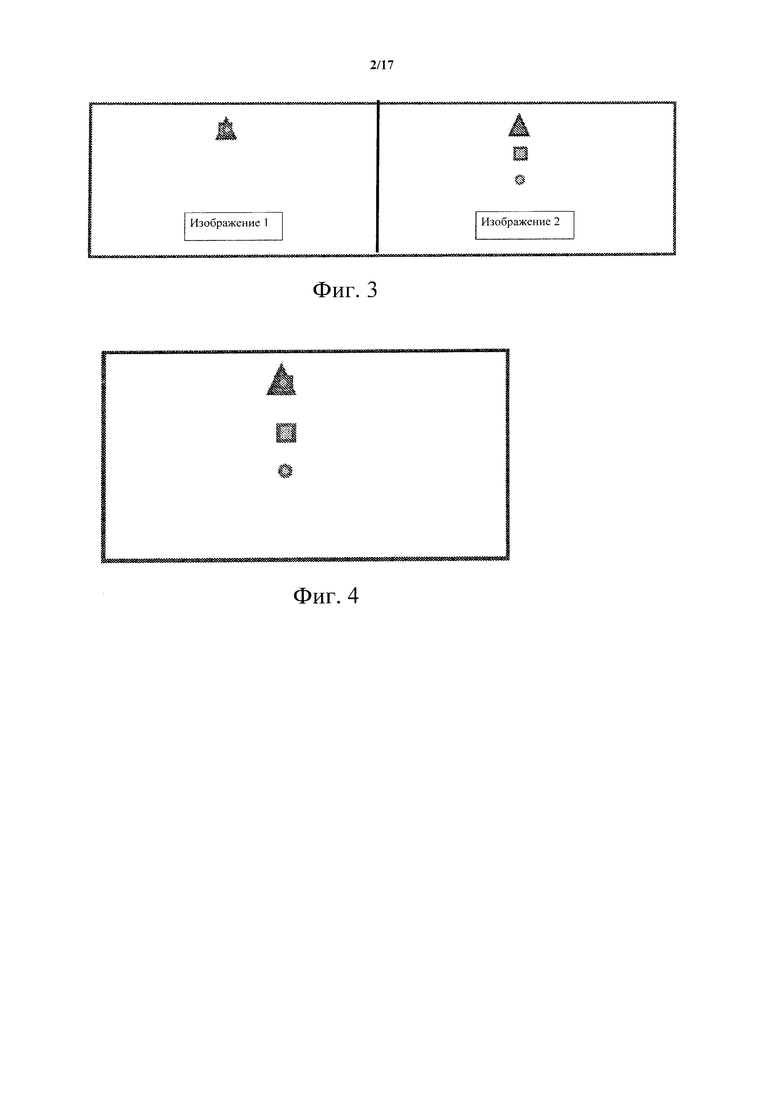
Центральный луч играет решающую роль в параллаксе, создаваемом посредством совмещения множества изображений. На фиг. 2 проиллюстрированы две оптические системы (камеры) рядом друг с другом. В случае верхнего блока линз квадрат, треугольник и прямоугольник соответствуют одной точке в изображении, тогда как в случае нижнего блока линз они соответствуют трем отличным точкам, как показано. В верхней системе съемки они снимаются одним центральным лучом, тогда как в нижней системе съемки они снимаются тремя отличными центральными лучами. При сочетании двух изображений на фиг. 3 появится параллакс и получится изображение, как показано на фиг. 4.
Поиск алгоритма, который дает возможность делать поправку на параллакс, продолжается многие годы. Были разработаны многочисленные решения, но даже с использованием наиболее современных алгоритмов на сегодняшний день артефакты все еще остаются в панорамных изображениях. Для некоторых это может не являться проблемой, поскольку могут быть наняты инженеры по программному обеспечению для правки изображений кадр за кадром; тем не менее, для обычного потребителя данный вариант правки каждого изображения не является возможным. Необходимо лучшее решение, посредством которого делается эффективная поправка на параллакс, перед тем, как такая система может быть предоставлена на потребительский рынок. Предпочтительным является решение проблемы снижения параллакса в изображении оптическим способом, нежели компьютерным.
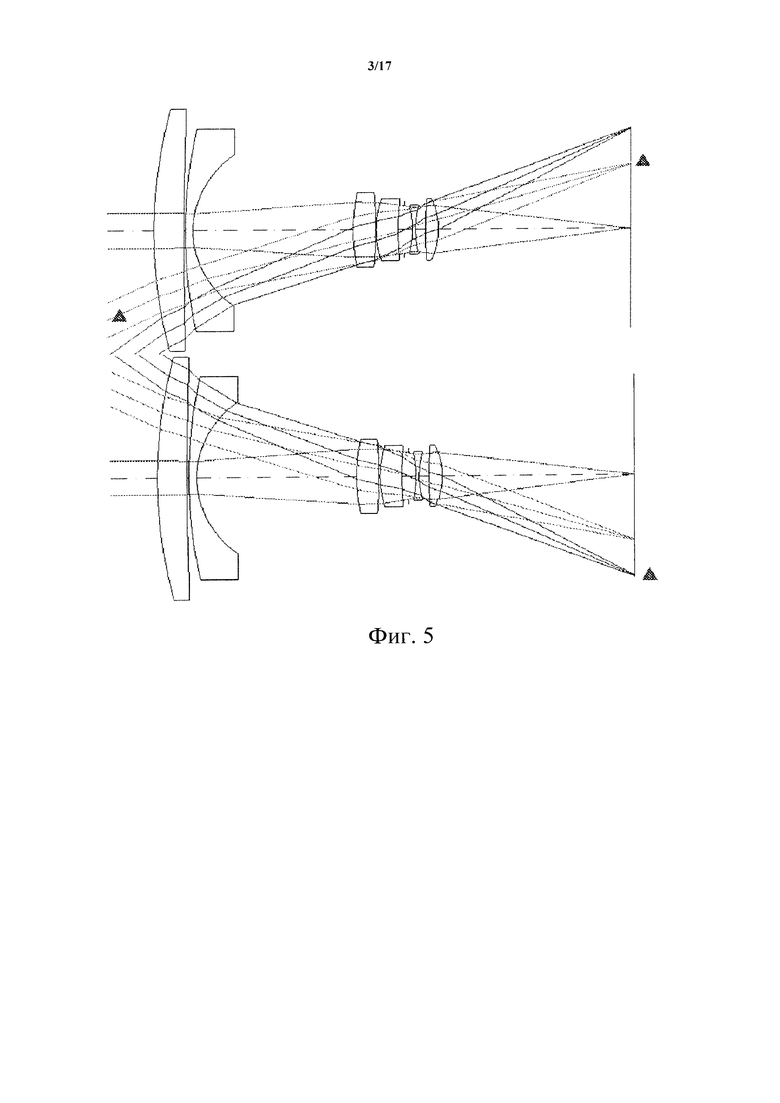
Недостатком текущих структур, создаваемых для панорамной съемки одним снимком, является параллакс, поскольку они создаются из систем съемки с перекрывающимися полями обзора. Фиг. 5 взята из патента США №2696758. На данной фигуре проиллюстрировано создание параллакса в доступных сегодня 360-градусных системах съемки. Поля обзора (FOV) перекрываются и треугольник, который появляется на кромке FOV в случае нижней системы линз, появится приблизительно 0,707 раз на FOV в верхней системе съемки. Таким образом, треугольник соответствует различным точками изображения для каждой камеры. Внизу он соответствует полному FOV (кромке изображения).
Таким образом, автор изобретения признал преимущества и плюсы системы панорамной съемки и связанных с ней способов, в которых отсутствует параллакс и в которых параллакс устраняется оптически, нежели посредством программного обеспечения постобработки. Такая система может быть применена в том числе для предоставления масштабируемого способа наложения улиц на планету; для предоставления возможности создания виртуальных экскурсий, как по городам, так и по частным учреждениям; для видеонаблюдения с высокой частотой кадров; для военных применений, включая технологию управления дронами и танками; в качестве альтернативы объективам типа "рыбий глаз", которые обеспечивают широкоугольную съемку за счет высокого искажения.
Краткое описание фигур
На фиг. 1 проиллюстрирован центральный луч оптической системы. Центральный луч определяет высоту объекта, а также высоту изображения.
На фиг. 2 проиллюстрирована причина возникновения параллакса при использовании множества рефракционных систем съемки для захвата изображения сцены. В случае верхнего блока линз три объекта соответствуют одной точке изображения; в случае нижнего блока линз они соответствуют трем отдельным точкам изображения.
На фиг. 3 (слева) проиллюстрировано изображение, сформированное верхним блоком линз по фиг. 2, тогда как показанное справа изображение сформировано нижним блоком линз.
На фиг. 4 показано изображение, которое будет являться результатом сочетания двух изображений по фиг. 3.
На фиг. 5 показано, как возникает параллакс в создаваемых сегодня камерах. Поля обзора перекрываются и треугольник, который появляется на кромке FOV в случае нижней системы линз, появится приблизительно 0,707 раз на FOV в верхней системе съемки. Таким образом, треугольник соответствует различным точками изображения для каждой камеры. Внизу он соответствует полному FOV (кромке изображения).
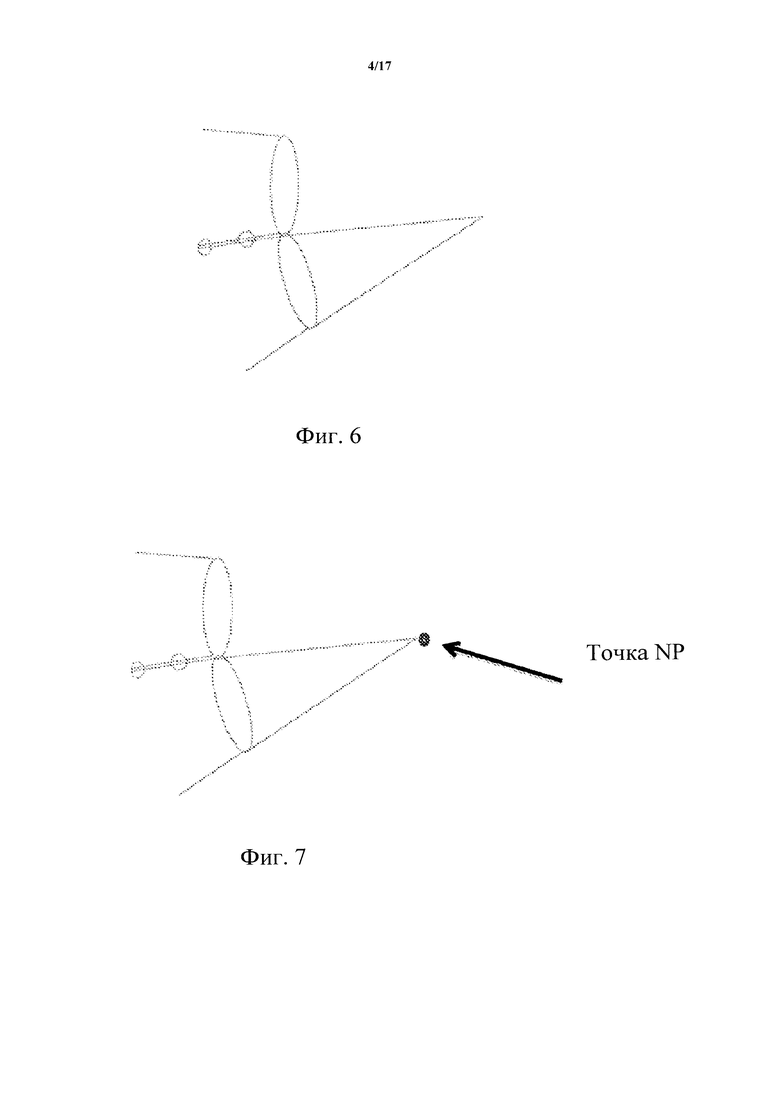
На фиг. 6 проиллюстрированы две системы съемки рядом друг с другом, которые не имеют параллакса. Центральные лучи на кромке каждой системы ограничены в прохождении параллельно друг другу. Таким образом, объекты, находящиеся вдоль данной линии, изображены в одной точке на плоскости изображения.
На фиг. 7 проиллюстрировано расположение точки, в которой отсутствует параллакс (NP), (как определено далее) для обеих показанных систем съемки.
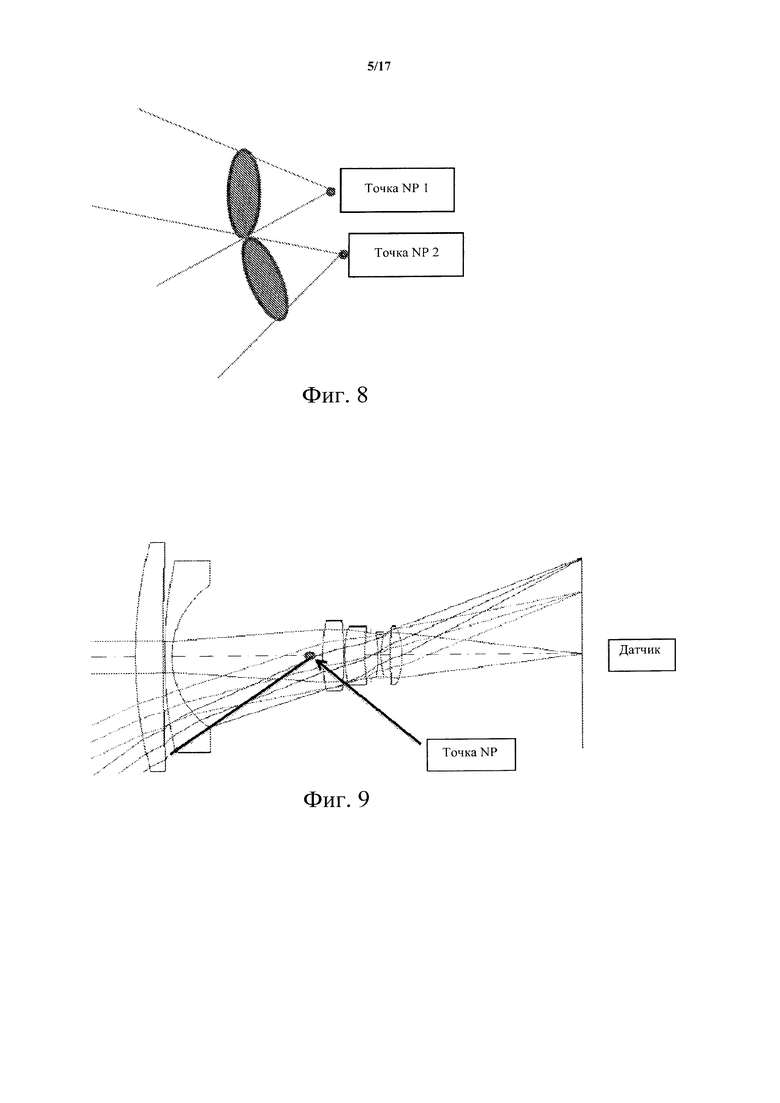
На фиг. 8 показано, что центральные лучи на кромке FOV не параллельны, таким образом, точки NP находятся в различных местах.
На фиг. 9 проиллюстрирована система съемки, точка NP которой находится перед датчиком изображения.
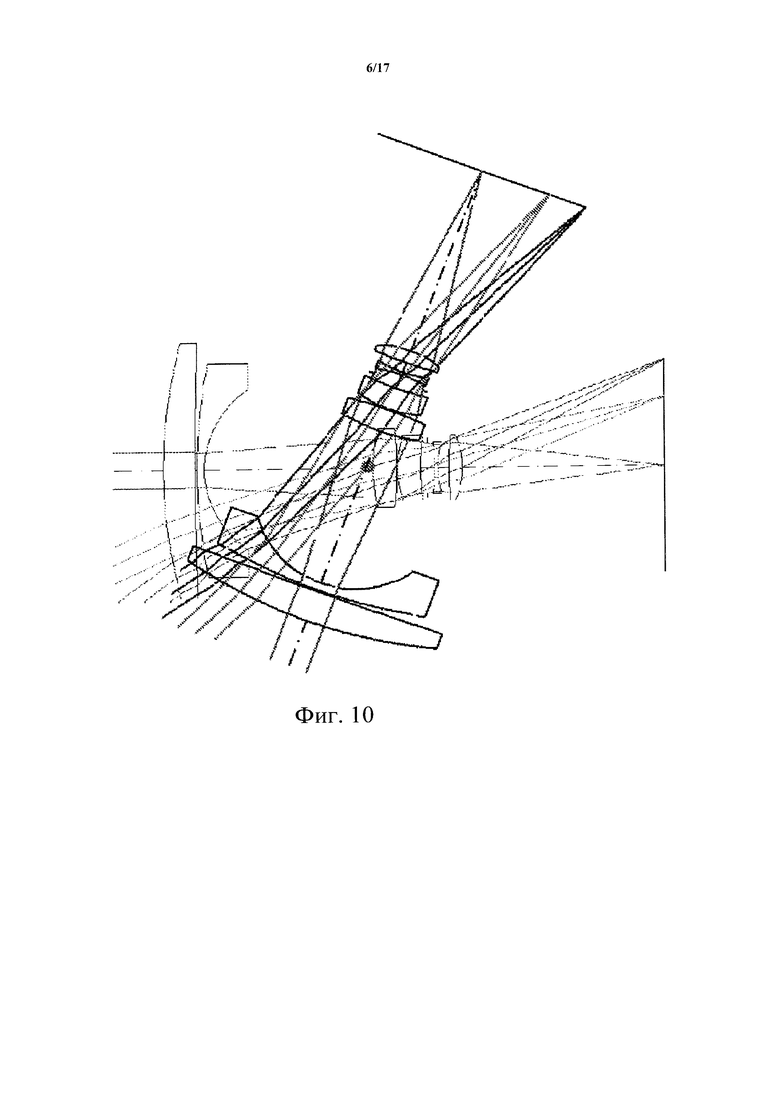
На фиг. 10 проиллюстрированы две системы съемки, выравненные так, что центральные лучи на кромке каждого из FOV параллельны друг другу.
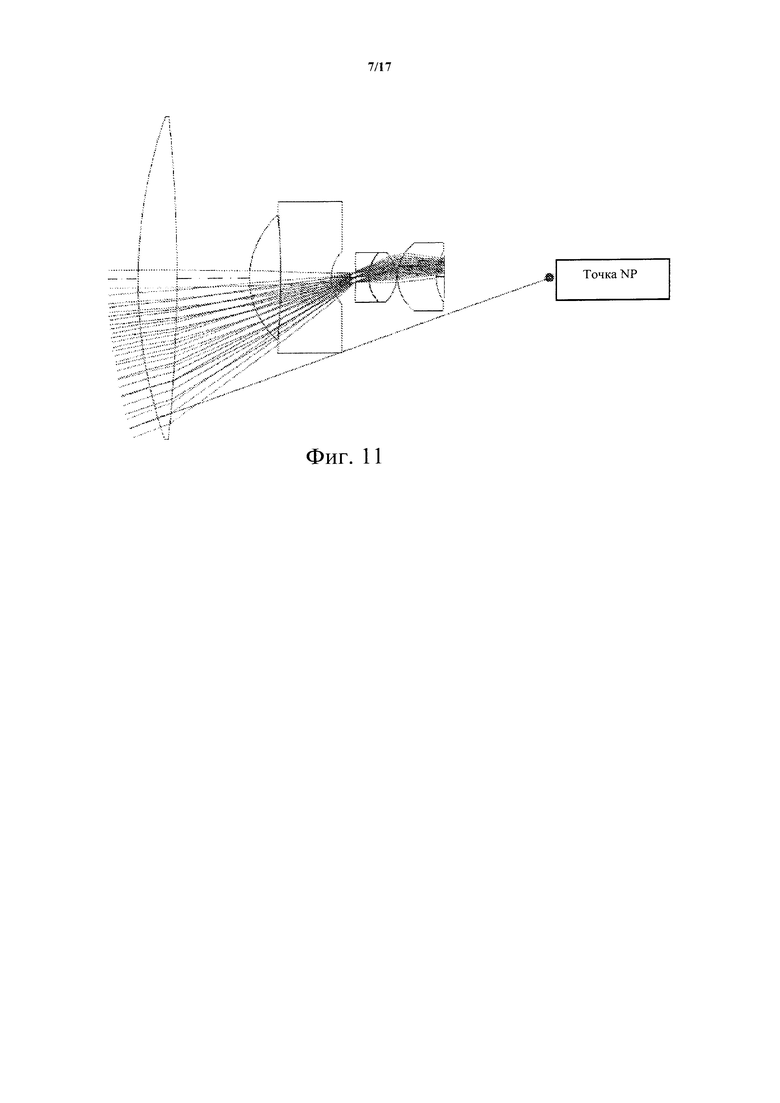
На фиг. 11 показана система съемки, точка NP которой находится позади плоскости изображения.
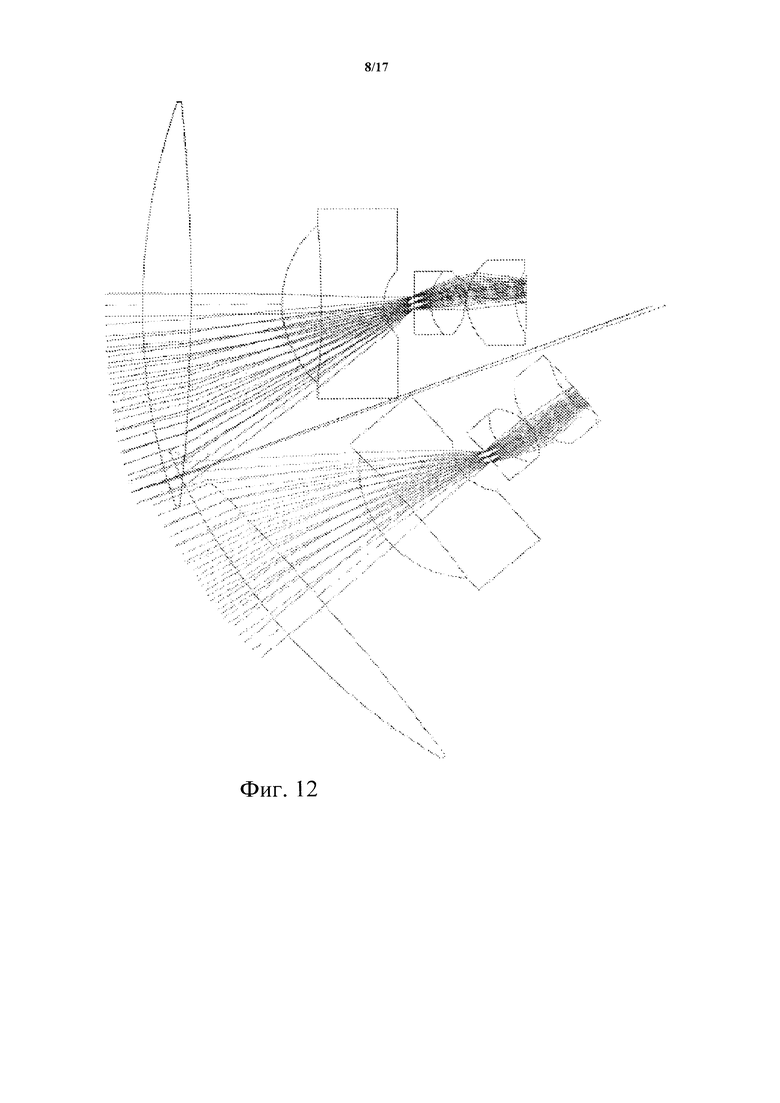
На фиг. 12 показана многоэлементная система съемки с совмещенными точками NP.
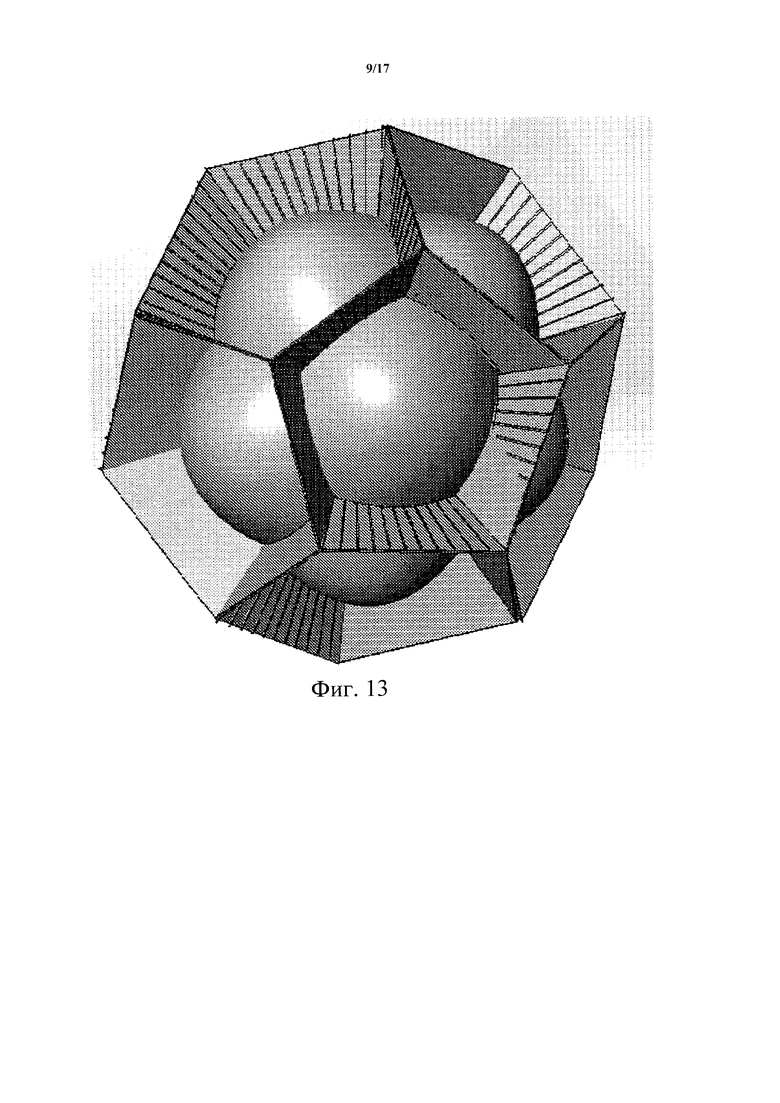
На фиг. 13 показано трехмерное представление 360-градусной системы линз, при этом кромочные лучи ограничены в прохождении вдоль каждой поверхности додекаэдра.
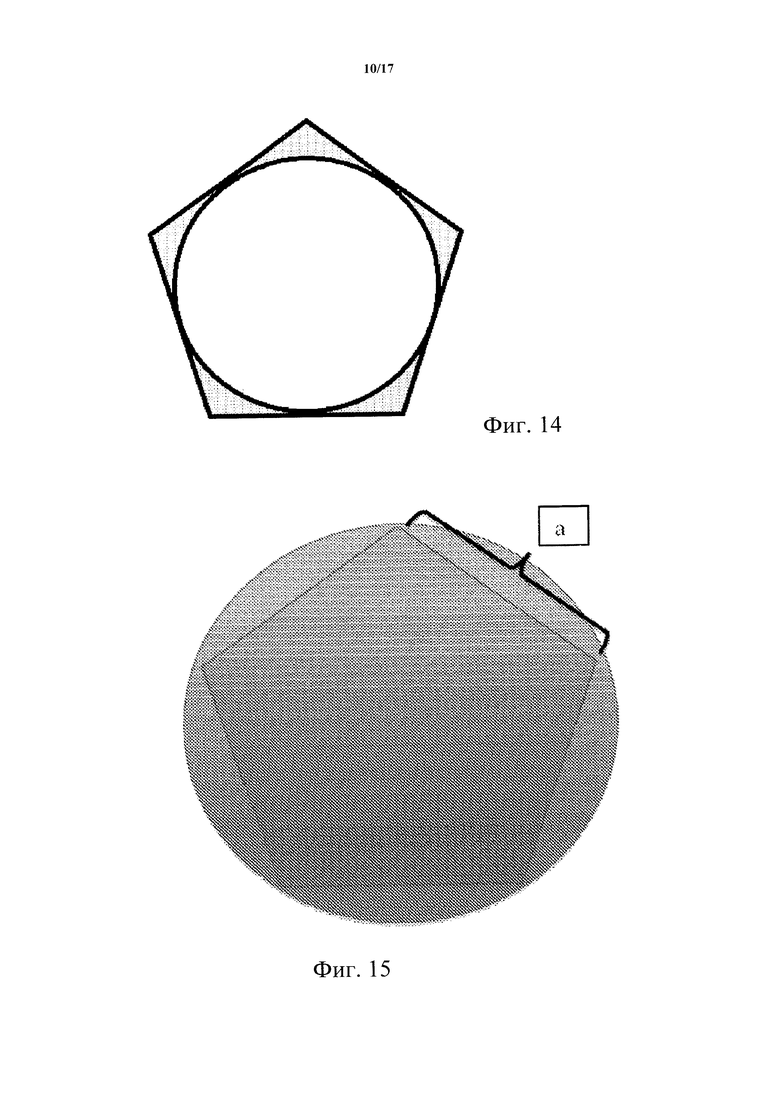
На фиг. 14 показан круг, вписанный в пятиугольник, иллюстрирующий слепые пятна, которые бы создавались, если бы линза была круглой, а не пятиугольной.
На фиг. 15 показан первый элемент линзы каждой системы, первоначально предназначенный для того, чтобы описывать правильные пятиугольники.
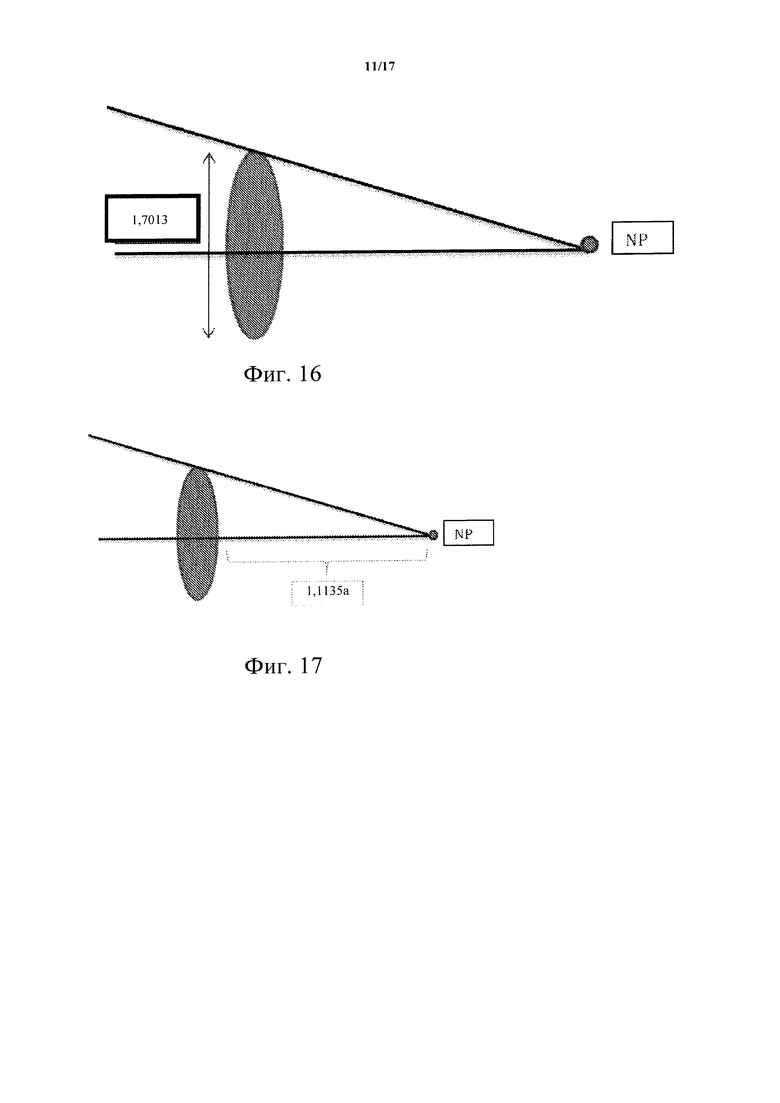
На фиг. 16 диаметр первого элемента линзы ограничен 1,7013а, где а - длина стороны правильного пятиугольника.
На фиг. 17 расстояние от центра первого элемента линзы до центра додекаэдра (точки NP) составляет 1,1135а, где а - длина стороны пятиугольника.
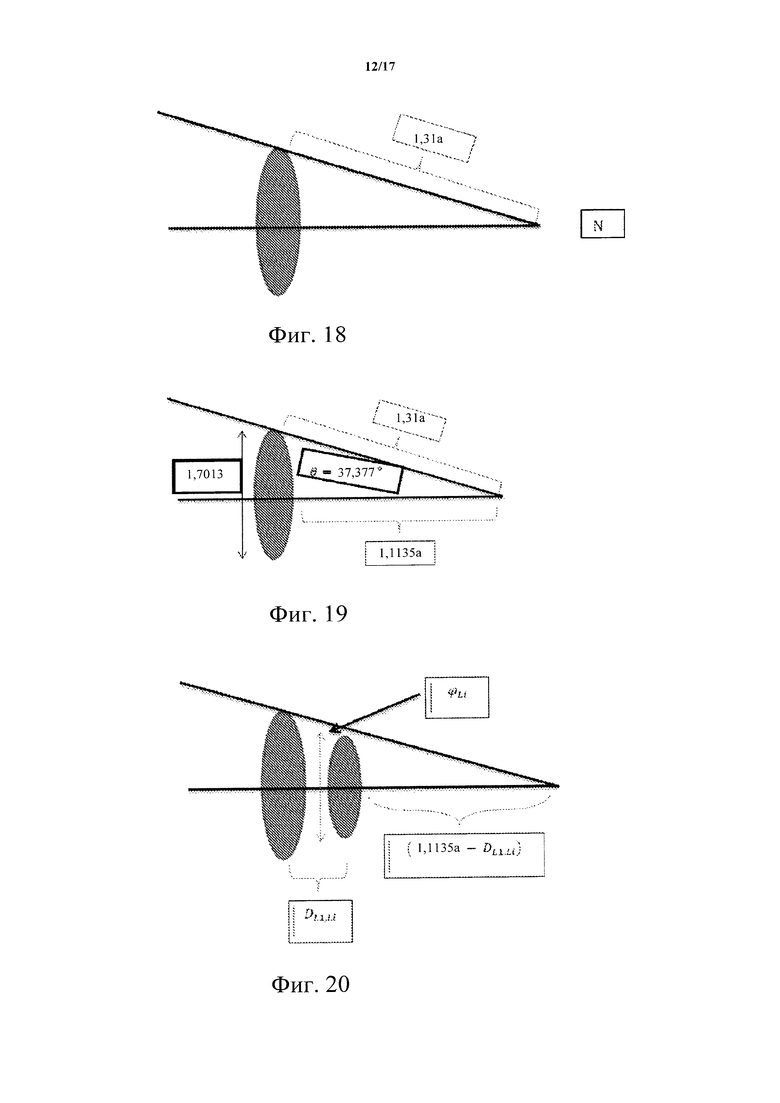
На фиг. 18 расстояние от верхней части поверхности пятиугольника до точки NP ограничено 1,31а, где а - длина стороны правильного пятиугольника. В данном случае, точка NP является центром додекаэдра.
На фиг. 19 показано схематическое изображение, на котором проиллюстрированы ограничения, накладываемые на первый элемент линзы относительно центра двенадцатиугольника, "а" - длина стороны каждого правильного пятиугольника в додекаэдре.
На фиг. 20 показано схематическое изображение, на котором проиллюстрировано, что максимальная длина любого элемента ограничена таким образом, что вписывается в 31,717-градусный полуконус света, исходящего из центра додекаэдра.
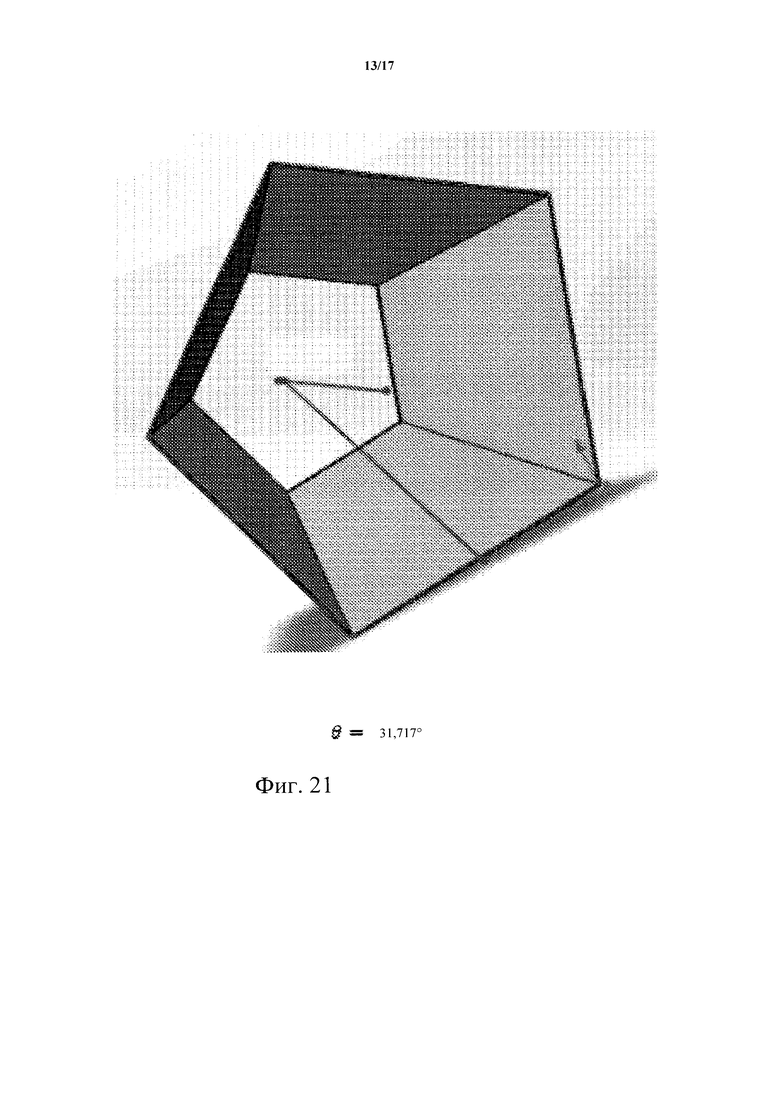
На фиг. 21 показано трехмерное представление 1/12-ой додекаэдра и угла между центром додекаэдра и центром кромки пятиугольника.
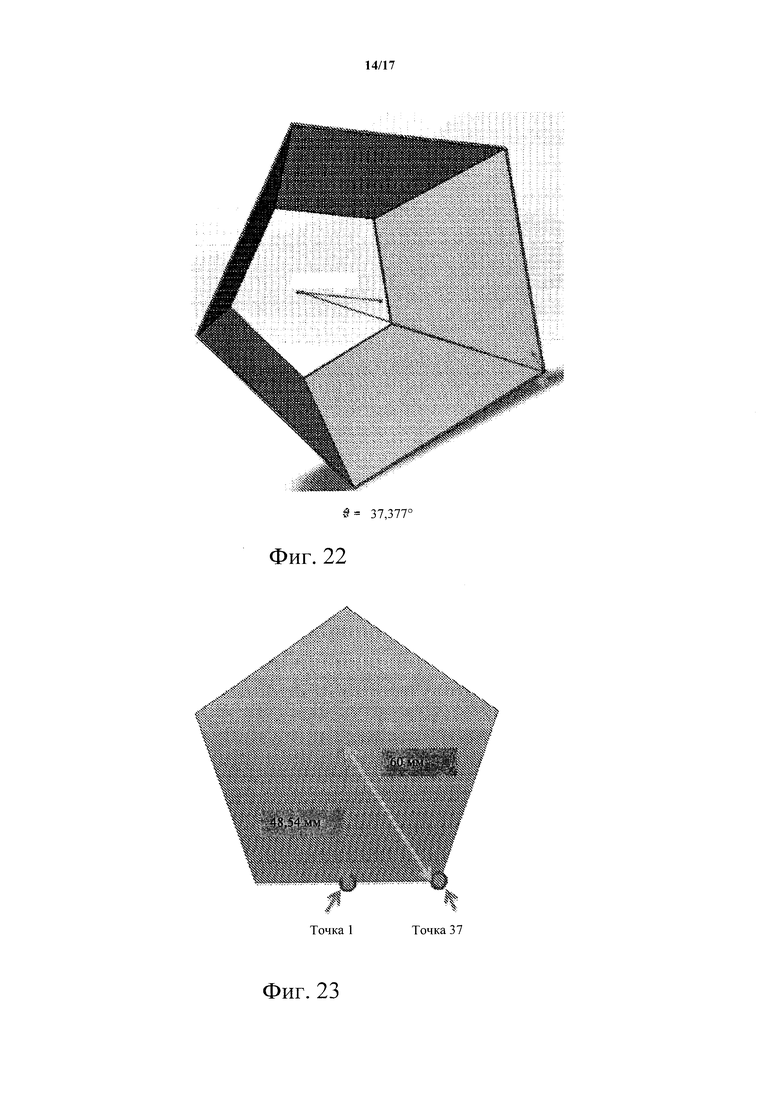
На фиг. 22 показано трехмерное представление 1/12-ой додекаэдра и угла между центром додекаэдра и кромкой кромки пятиугольника.
На фиг. 23 показан элемент линзы в форме пятиугольника, на котором показана высота до луча 1 и луча 37.
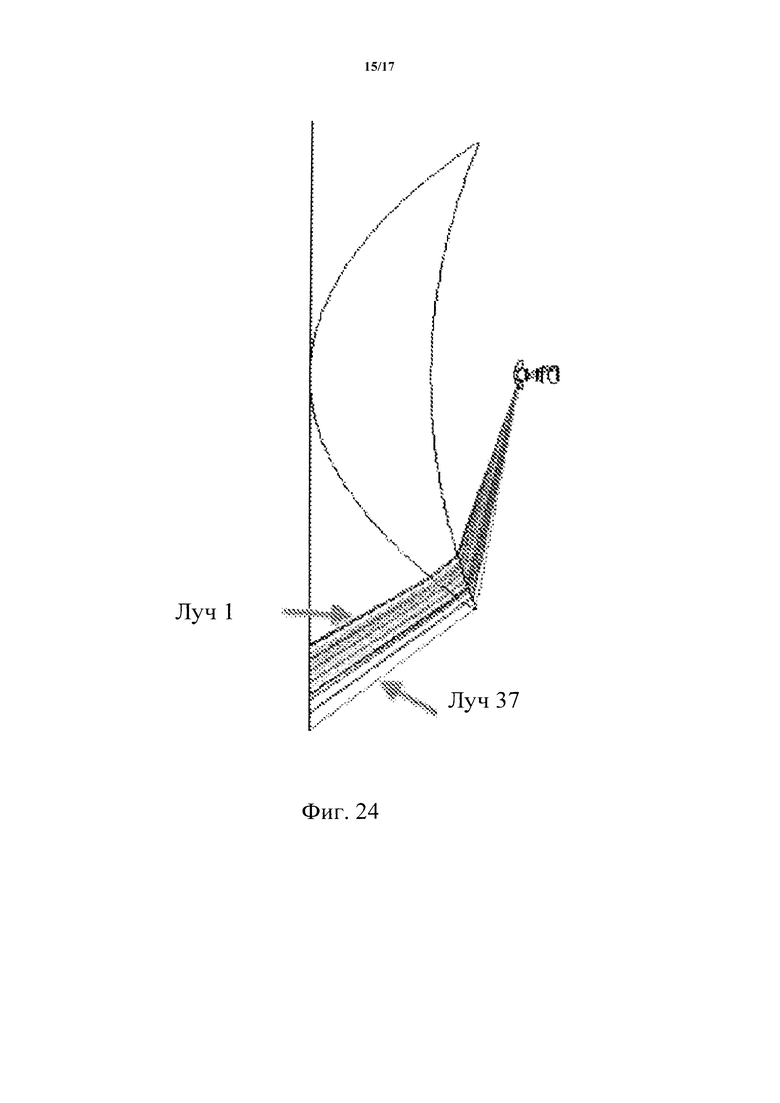
На фиг. 24 показано схематическое изображение, выполненное в программе Zemax, текущей структуры линзы, на которой показаны лучи 1 и 37 в виде модели.
На фиг. 25 показано трехмерное схематическое изображение, выполненное в программе Zemax, текущей структуры линзы с обратной стороны.
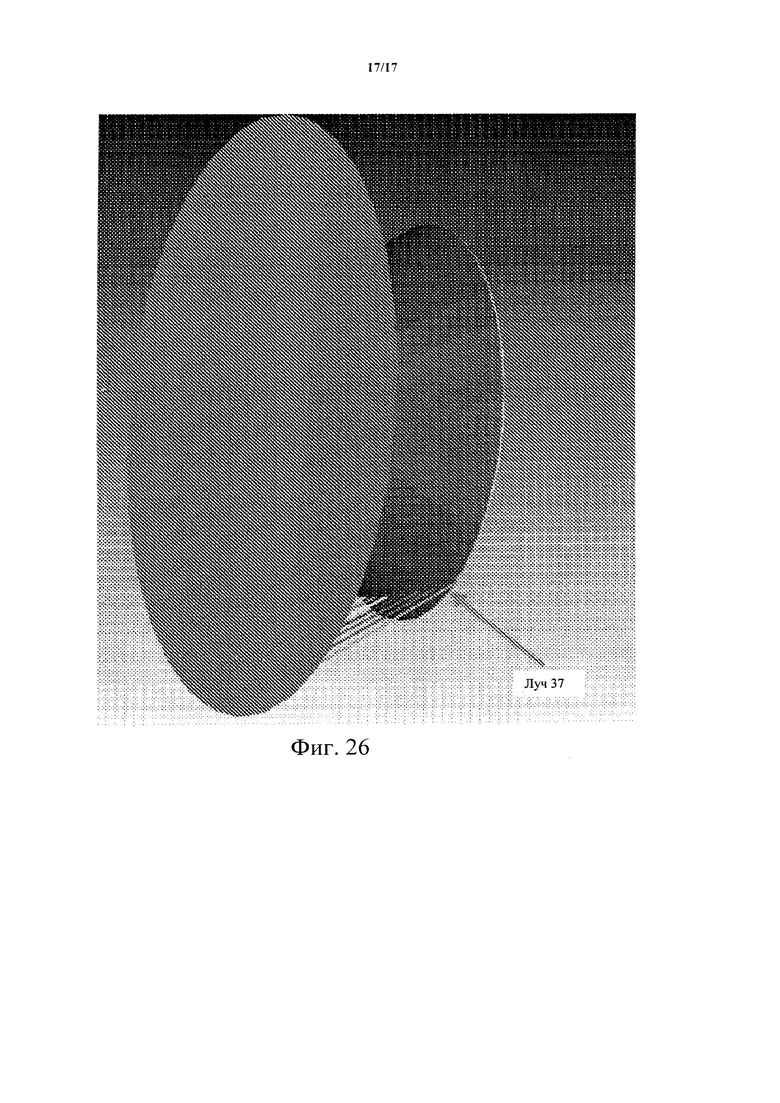
На фиг. 26 показано трехмерное схематическое изображение, выполненное в программе Zemax, сбоку.
Сущность изобретения
Аспектом изобретения является система многокамерной панорамной съемки, не имеющая параллакса. В соответствии с неограничительным вариантом осуществления система многокамерной панорамной съемки содержит множество отдельных систем съемки, расположенных последовательно рядом друг с другом, при этом поле обзора каждой отдельной системы съемки объединено с полем обзора каждой смежной отдельной системы съемки, при этом дополнительно шаблон центральных лучей на кромке поля обзора любой из отдельных систем съемки будет по существу параллельным шаблону центральных лучей на кромке поля обзора любой из смежных отдельных систем съемки, так что кажется, что все по существу параллельные шаблоны центральных лучей совпадают в общей точке при рассмотрении с объектного пространства. В различных неограничительных вариантах осуществления система многокамерной панорамной съемки может содержать или дополнительно характеризоваться следующими признаками, ограничениями, характеристиками либо по отдельности, либо в различных их сочетаниях:
- она содержит множество одинаковых отдельных систем съемки;
- при этом по меньшей мере 50% шаблона центральных лучей отклонены от параллели на двадцать градусов или меньше;
- при этом каждая из отдельных систем съемки содержит датчик изображения, при этом дополнительно точка кажущейся сходимости находится позади датчика изображения каждой из отдельных систем съемки;
- при этом ни одна из отдельных систем съемки физически не перекрыта;
- при этом система имеет геометрию додекаэдра, при этом дополнительно система обладает 360-градусным FOV;
- при этом передняя линза каждой из отдельных систем съемки является частью одной непрерывной оптики произвольной формы;
- при этом каждый датчик изображения является датчиком волнового фронта;
- при этом каждая из отдельных систем съемки имеет изогнутую плоскость изображения для соответствия искажению и кривизне Петцваля системы съемки.
Аспектом изобретения является способ формирования изображения объекта, не имеющего параллакса. В соответствии с неограничительным вариантом осуществления способ включает предоставление системы панорамной съемки, при этом система панорамной съемки содержит множество отдельных систем съемки, каждая из которых обладает полем обзора; и ограничение шаблона центральных лучей на кромке поля обзора каждой из отдельных систем съемки таким образом, чтобы он по существу был параллельным шаблону центральных лучей на кромке поля обзора непосредственно смежной одной из отдельных систем съемки, так что кажется что все параллельные шаблоны центральных лучей совпадают в общей точке при рассмотрении с объектного пространства, при этом система съемки не имеет параллакса. В различных неограничительных вариантах осуществления способ панорамной съемки может включать или дополнительно характеризоваться следующими признаками, ограничениями, характеристиками, этапами либо по отдельности, либо в различных их сочетаниях:
- дополнительно включает ограничение по меньшей мере 50% шаблона центральных лучей для отклонения от параллели на двадцать градусов или меньше;
- дополнительно включает применение алгоритма для правки аберрации искажения в непрерывном 360-градусном изображении, сформированном системой съемки.
Аспектом изобретения является способ создания системы панорамной съемки (по существу) без параллакса. В соответствии с неограничительным вариантом осуществления способ включает определение геометрии общей системы панорамной съемки, при этом общая система панорамной съемки содержит множество отдельных систем съемки, имеющих соответствующие поля обзора, расположенных последовательно рядом друг с другом, так что поля обзора смежных систем съемки объединены; создание отдельных систем съемки, так что шаблон центральных лучей на кромке поля обзора одной из отдельных систем съемки будет по существу параллельным шаблону центральных лучей на кромке поля обзора смежной одной из отдельных систем съемки, так что будет казаться, что по существу параллельный шаблон центральных лучей сходится в общей точке при рассмотрении с объектного пространства. В различных неограничительных вариантах осуществления способ панорамной съемки может включать или дополнительно характеризоваться следующими признаками, ограничениями, характеристиками, этапами либо по отдельности, либо в различных их сочетаниях:
- при этом общая система панорамной съемки содержит множество одинаковых отдельных систем съемки;
- при этом при создании отдельных систем съемки обеспечивают отсутствие физического перекрытия между любыми из множества отдельных систем съемки;
- при это при создании отдельных систем съемки обеспечивают расположение точки кажущейся сходимости позади соответствующего датчика изображения каждой отдельной системы съемки.
Подробное описание приведенных в качестве примера неограничительных вариантов осуществления
Для достижения минимального параллакса в панорамной камере поля обзора (FOV) систем съемки не должны перекрываться. Таким образом, центральный луч на кромке FOV должен достигать оптической системы параллельно центральным лучам на кромке смежной оптической системы.
На фиг. 6 проиллюстрированы две системы съемки рядом друг с другом, которые не имеют параллакса. Центральные лучи на кромке каждой системы ограничены в прохождении параллельно друг другу. Таким образом, объекты, находящиеся вдоль данной линии, изображены в одной точке на плоскости изображения. Данный подход может быть использован для создания конкретных элементов линзы. Поля обзора не перекрывают друг друга, поскольку центральные лучи под смешанными углами ограничены в прохождении параллельно друг другу и совпадают в общей точке. Общая точка будет зависеть от геометрии, в которую заключены линзы. Другими словами, центральные лучи ограничены в прохождении параллельно, так что кажется, что они пересекают оптическую ось в одной точке при рассмотрении системы линз с объектного пространства. В действительности, они пересекают оптическую ось в датчике изображения, который находится перед данной воображаемой точкой, но при рассмотрении системы линз с объектного пространства кажется, что они пересекаются в одной точке.
Точка NP (Точка, в которой отсутствует параллакс)
Для способствования пониманию предыдущей идеи определен термин под названием Точка, в которой отсутствует параллакс (Точка NP). Точка NP является обобщением, используемым для понимания того, как центральные лучи на кромке FOV могут быть физически ограничены в прохождении параллельно друг другу и какие правила они должны соблюдать. Точка NP является точкой, в которой центральные лучи на кромке смежных оптических систем пересекают оптическую ось при рассмотрении системы с объектного пространства в случае системы панорамной съемки без параллакса.
В соответствии с воплощенным изобретением точки NP для каждой системы съемки должны находиться в одном месте. Это означает, что лучи смежных оптических систем должны быть параллельны. На фиг. 9 показана система съемки, точка NP которой находится перед датчиком изображения. На фиг. 10 проиллюстрированы две системы съемки, выравненные так, что центральные лучи на кромке каждого из FOV параллельны друг другу. Данное ограничение означает, что точка NP должна находиться в одном месте для обеих систем. Если точка NP находится перед датчиком изображения, тогда невозможно выровнять точки NP без перекрытия элементов линзы. Данная система не будет иметь никакого параллакса, но ее невозможно реализовать физически. Это означает, что при создании оптической системы точка NP должна находиться позади всех элементов в системе съемки, чтобы никакие элементы физически не перекрывали друг друга.
На фиг. 11 показана система, точка NP которой находится позади плоскости изображения. В данном случае возможно расположение множества систем съемки так, чтобы поля обзора не перекрывались, как показано на фиг. 12. Точное место точки NP будет определено геометрией расположений линз. Посредством произвольного выбора места, то есть произвольного выбора высоты луча и угла падения, так что кажется, что центральный луч пересекает оптическую ось позади плоскости изображения, для геометрии систем линз могут потребоваться сотни блоков линз для захвата полного 360-градусного изображения. Место точки NP должно быть определено после рассмотрения геометрии, которая должна быть использована для линз.
Вариант осуществления настоящего изобретения относится к системе многокамерной панорамной съемки, в которой поля смежных блоков съемки объединены для формирования составного поля обзора всей системы съемки, как схематически проиллюстрировано на фиг. 7. Традиционные системы панорамной съемки соединяют блоки съемки таким образом, что их соответствующие поля обзора перекрываются, как схематически проиллюстрировано на фиг. 8, что приводит к параллаксу в полученных изображениях и требует корректирующего программного обеспечения для совмещения изображений для исключения параллакса.
В настоящем, приведенном в качестве примера варианте осуществления лучи, попадающие на кромку одного блока съемки, ограничены в прохождении параллельно входящим лучам смежного блока съемки, так что обе системы съемки совместно используют один набор кромочных лучей. Как видно из трехмерной модели, показанной на фиг. 13, лучи на кромке одного блока съемки такие же, как и лучи на кромке смежного блока съемки. Лучами являются серые линии, ограниченные в прохождении вдоль поверхности кромки додекаэдра. Серые лучи на кромке каждой линзы в форме пятиугольника совпадают с лучами, попадающими на его смежную поверхность. Все лучи в радиусах ниже кромочных лучей проходят под меньшими углами падения, так что данные лучи не перекрывают лучи от смежных систем.
В воплощенной системе панорамной съемки используется вышеупомянутый метод создания системы съемки, точка NP которой находится позади датчика изображения, и сочетается множество систем линз в геометрии додекаэдра для создания камеры с 360-градусным FOV с минимальным параллаксом или без него.
Первый элемент линзы будет иметь форму поверхности правильного пятиугольника. Завершенная система будет состоять из 12 отдельных блоков съемки, каждый из которых будет иметь общую точку NP для лучей вдоль кромки пятиугольника, и ограничена в углах падения, соответствующих геометрии, заданной геометрией додекаэдра.
Додекаэдром является полиэдр с 12 поверхностями. Полиэдром является трехмерное тело, состоящее из набора многоугольников, соединенных по кромкам. Каждой стороной додекаэдра является правильный пятиугольник (пятиугольник со сторонами одинаковой длины). Додекаэдры имеют некоторые важные геометрические свойства, которые следует понимать для создания системы линз с использованием геометрии. Свойства в свою очередь будут обсуждены сразу после краткого обсуждения того, почему первая линза должна иметь форму поверхности пятиугольника.
С использованием круглой линзы в качестве первого элемента в геометрии додекаэдра невозможно захватить всю информацию в 360-градусном поле обзора с использованием текущего метода выравнивания кромочных лучей. Пропущенная площадь, из которой первая линза вписывается в пятиугольник (заштрихованная область на фиг. 14), создает слепые пятна. Поскольку поля обзора никогда не перекрываются, данная информация никогда не захватывается. Может быть вычислено, что отношение между площадью круга и площадью пятиугольника, в который он вписывается, равняется π/5 или 62,83%. Это максимальный объем информации, которую можно записать для 360-градусного поля по окружности. Слепые пятна, создаваемые между линзой и пятиугольником, удаляют почти 40% информации в 360-градусном изображении.
Следующее описание предназначено для иллюстрации геометрии додекаэдра и является необходимым при создании системы линз с использованием вышеупомянутых метода NP и геометрии додекаэдра, но не является существенным при создании системы панорамной съемки без параллакса, воплощенной в данном документе.
Свойство 1: Диаметр круга, описывающего правильный пятиугольник
Для каждой из 12 конкретных систем линз первая линза будет создана так, чтобы описывать каждый из правильных пятиугольников додекаэдра, как показано на фиг. 15. Диаметр круга, описывающего правильный пятиугольник, следующий:
D=a/sin (36°)=1,7013а
В вышеуказанном уравнении "a" - длина стороны правильного пятиугольника. Первый элемент линзы каждой системы будет полностью описывать каждый пятиугольник и, следовательно, диаметр первого элемента линзы для каждой системы задается следующим образом: 1,7013а, как проиллюстрировано на фиг. 16.
Свойство 2: Вписанная сфера, касающаяся центра каждого пятиугольника
Радиус вписанной сферы (касающейся каждой поверхности додекаэдра) следующий:

Данным радиусом является расстояние от центра додекаэдра, который будет являться точкой NP для каждой линзы в данной структуре, до центра поверхности пятиугольника, который совпадает с центром (оптической осью) первого элемента линзы в системе, расположенной в пределах данного пятиугольника. Данная точка находится в центре каждой поверхности пятиугольника. Длина между точкой NP и центром додекаэдра ограничена 1,1135а, где а - длина одной из сторон пятиугольника, как проиллюстрировано на фиг. 17.
Свойство 3: Средний радиус додекаэдра
Средним радиусом является точка, соединяющая центр додекаэдра и середину каждой кромки. Данная длина задается следующим образом:

Данное уравнение ограничивает расстояние между верхней частью поверхности пятиугольника и точкой NP, как проиллюстрировано на фиг. 18.
Ограничения
Геометрические свойства додекаэдра ограничивают структуру 12 линз, которые будут его воплощать. В частности, есть следующие четыре параметра на основе вышеупомянутого описания:
1. Диаметр 1-го элемента линзы: 1,7013а;
2. Расстояние от 1 -го элемента линзы до центра додекаэдра: 1,1135а;
3. Расстояние от верхней части 1-го элемента линзы до центра додекаэдра: 1,31а;
4. FOV=37,3777 градусов
Учитывая любые два из первых трех ограничений, получается, что угол между оптической осью линзы и верхней частью первого элемента линзы равен 37,3777 градусам (см. фиг. 19):
tan-1 ((1,7013/2)/1,1135)-37,377°.
Необходимо, чтобы данный угол в 37,37 градусов был полем обзора линзы. Это гарантирует, что точка NP, которая является точкой, в которой центральный луч смешивания (при этом угол смешивания является полным FOV) пересекает оптическую ось в объектном пространстве, находится в центре додекаэдра. Все остальные ограничения будут гарантировать, что элементы линзы находятся перед точкой NP и что элементы попадают под 31,717-градусный полуконус света.
Диаметр других элементов линз и датчика
С учетом четырех вышеупомянутых ограничений известно, что каждый элемент линзы после первого должен иметь такой размер, чтобы подходить геометрии додекаэдра. Для того, чтобы предыдущие элементы линз подходили, любой элемент линзы или датчика должен вписываться в 31,717-градусный полуконус света, начиная с центра додекаэдра и по касательной к диаметру первого элемента линзы. По мере увеличения расстояния от первого элемента линзы диаметр предыдущих элементов линз будет пропорционально уменьшаться (см. фиг. 20).
Максимальный диаметр любого элемента линзы или датчика перед первым элементом может геометрически составлять меньше или равняться (1,1135a-D)*tan(31,716 градус), где D - расстояние, на котором находится данный элемент от первого элемента линзы.
Таким образом, теперь есть пять ограничений, которые предоставят данной системе линз возможность соответствовать геометрии додекаэдра и позволят 360-градусную съемку:
1. Диаметр 1-го элемента линзы: 1,3763а;
2. Расстояние от 1-го элемента линзы до центра додекаэдра: 1,1135а;
3. Расстояние от верхней части 1-го элемента линзы до центра додекаэдра: 1,31а;
4. FOV=37,377 градусов;
5. ϕLi(1,1135а-DLI, Li) tan (31,717°),
где ϕLi - диаметр любого элемента линзы, отделенного расстоянием DLI, Li и от первого элемента. Учитывая вышеупомянутые пять ограничений, где все линзы созданы так, что они попадают под 31,717-градусный конус света, исходящий из центра додекаэдра, можно выполнить систему линз без параллакса.
Структура системы
Была выбрана геометрия для линз. Платоновые тела имеют свойства, заключающиеся в том, что они состоят из многочисленных тел одинаковых геометрии и объема. В случае системы 360-градусной съемки это позволяет создание составной системы съемки из одной повторяющейся структуры линзы. Геометрия додекаэдра была выбрана, поскольку по своей геометрии она приблизительно сферическая.
Для того, чтобы кромочные лучи одного блока съемки проходили параллельно кромочным лучам смежного блока, они должны проходить под одним углом. Углом, совместно использующимся обоими блоками съемки, является угол кромочной поверхности додекаэдра. В центре кромочной поверхности угол относительно центра додекаэдра составляет 31,717 градусов, как проиллюстрировано на фиг. 21. На углу кромочной поверхности угол относительно центра додекаэдра составляет 37,377 градусов, как проиллюстрировано на фиг. 22.
Для того, чтобы лучи вдоль смежных блоков съемки совпадали, первая линза блока съемки врезается в пятиугольник, соответствуя поверхности додекаэдра. В центре кромки луч, попадающий на поверхность, проходит под углом падения в 31,717 градусов. На углу кромки угол падения входящего луча составляет 37,377 градусов. Во всех точках вдоль кромки линзы угол падения входящего луча соответствует геометрии поверхности додекаэдра.
Угол падения для 37 лучей вдоль кромки линзы в форме пятиугольника был вычислен с использованием тригонометрии, зная расстояние от центра додекаэдра до центра поверхности пятиугольника и зная расстояние от центра додекаэдра до указанной кромочной точки, как показано на фиг. 21 и 22. Высота каждого луча была ограничена в прохождении вдоль кромки пятиугольника. Например, если радиус, равный 120 мм, описывает описанную окружность поверхности 1, луч в точке 1 имеет высоту 48,54 мм и угол падения 31,717 градусов. Луч в точке 37 имеет высоту 60 мм и угол падения 37,377 градусов. В таблице I представлены значения для высот лучей и угла падения для 37 точек между точкой 1 и точкой 36, как показано на фиг. 23.
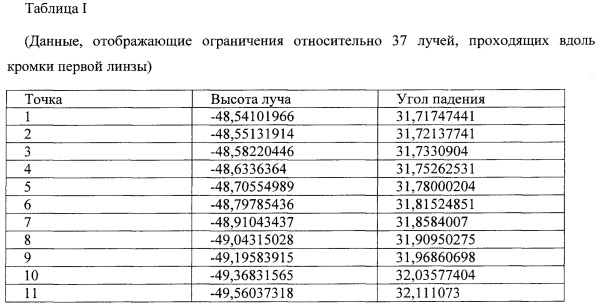
Схематическое изображение, иллюстрирующее ограничения лучей, показано на фиг. 24. Луч 1 имеет высоту 48,54 мм и угол падения 31,717 градусов. Луч 1 является лучом, проходящим через точку 1 по фиг. 24. Луч 2 имеет высоту 60 мм и угол падения 37,377 градусов и является лучом, проходящим через точку 37 по фиг. 24. Все 37 лучей ограничены высотами и углами лучей, заданными в представленной выше таблице. Все ограниченные таким образом лучи попадают на линзу под таким же углом, что и на поверхность додекаэдра. При рассмотрении все тех же лучей другим способом можно увидеть, что лучи должным образом ограничены геометрией пятиугольника под правильными углами падения, как проиллюстрировано на фиг. 25 и 26.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования цифрового панорамного изображения | 2016 |
|
RU2654127C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ И ПАНОРАМНАЯ АППАРАТУРА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2420774C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СТЕРЕОСКОПИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2554299C2 |
| СИСТЕМЫ И СПОСОБЫ МИКРОСКОПИИ СТРУКТУРИРОВАННОГО ОСВЕЩЕНИЯ | 2020 |
|
RU2829111C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СИСТЕМЫ РАЗНЕСЕННЫХ В ПРОСТРАНСТВЕ ТЕЛЕКАМЕР ДЛЯ ФОРМИРОВАНИЯ ПАНОРАМНОГО ИЗОБРАЖЕНИЯ | 2019 |
|
RU2716896C1 |
| СПОСОБ ПАНОРАМНОЙ СЪЕМКИ | 2024 |
|
RU2831510C1 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ И ПРОГРАММА | 2010 |
|
RU2517685C2 |
| СТЕРЕОСКОПИЧЕСКАЯ СИСТЕМА | 1999 |
|
RU2221350C2 |
| ВСЕНАПРАВЛЕННОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 1998 |
|
RU2201607C2 |
| СПОСОБ СОСТАВЛЕНИЯ ТОПОГРАФИЧЕСКИХ ПЛАНОВ И КАРТ | 1925 |
|
SU21929A1 |

Группа изобретений относится к области оптической съемки. Способ формирования панорамного изображения, реализуемый с помощь системы многокамерной панорамной съемки, включает: предоставление системы панорамной съемки, имеющей множество отдельных систем съемки, расположенных в последовательном массиве. Каждая из отдельных систем съемки обладает оптической осью и полем обзора. Ограничение множества центральных лучей, которые проходят вдоль кромки поля обзора каждой из отдельных систем съемки на разных высотах лучей по отношению к оптической оси так, чтобы они были по существу параллельны другому множеству центральных лучей, которые проходят вдоль смежной кромки поля обзора непосредственно смежной одной из систем съемки, так что кажется, что все центральные лучи в поле обзора сходятся к общей точке при рассмотрении с объектного пространства. Поле обзора каждой из множества отдельных систем съемки объединено с полем обзора непосредственно смежной одной из отдельных систем съемки, но не перекрывает его. Техническим результатом является создание системы панорамной съемки и связанного с ней способа, в которых отсутствует параллакс и в которых параллакс устраняется оптически. 2 н. и 12 з.п. ф-лы, 1 табл., 26 ил.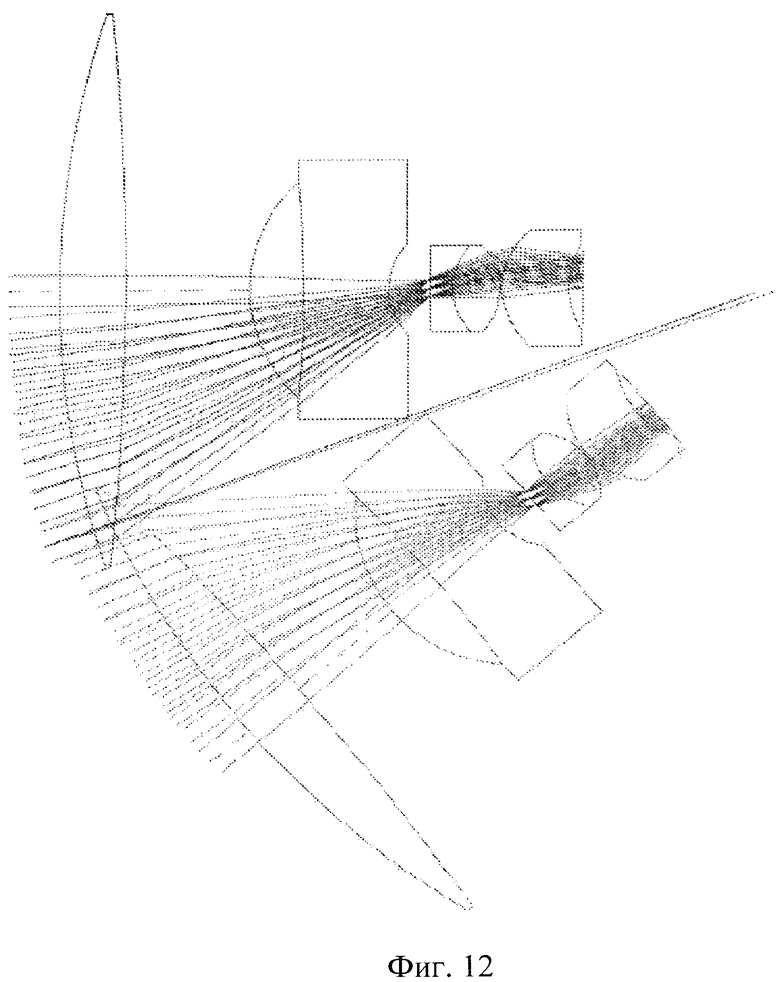
1. Способ формирования панорамного изображения, включающий:
предоставление системы панорамной съемки, имеющей множество отдельных систем съемки, расположенных в последовательном массиве, при этом каждая из отдельных систем съемки обладает оптической осью и полем обзора; и
ограничение множества центральных лучей, которые проходят вдоль кромки поля обзора каждой из отдельных систем съемки на разных высотах лучей по отношению к оптической оси так, чтобы они были по существу параллельны другому множеству центральных лучей, которые проходят вдоль смежной кромки поля обзора непосредственно смежной одной из систем съемки, так что кажется, что все центральные лучи в поле обзора сходятся к общей точке при рассмотрении с объектного пространства и поле обзора каждой из множества отдельных систем съемки объединено с полем обзора непосредственно смежной одной из отдельных систем съемки, но не перекрывает его.
2. Способ по п. 1, дополнительно включающий ограничение по меньшей мере 50% центральных лучей, которые проходят вдоль смежных кромок поля обзора смежных отдельных систем съемки для отклонения от параллели на двадцать градусов или меньше.
3. Способ по п. 1, где каждая из отдельных систем съемки использует один набор центральных лучей совместно с непосредственно смежной одной из отдельных систем съемки.
4. Способ по п. 1, где каждая из множества отдельных систем съемки идентична другой.
5. Способ по п. 1, где этап предоставления системы панорамной съемки включает:
выполнение последовательного массива в трехмерной геометрической форме, имеющей центр,
выполнение каждой из множества отдельных систем съемки с передней линзой, имеющей множество кромок, которые определяют множество углов кромочной поверхности в точках вдоль кромок относительно центра трехмерной геометрической формы и средней точки передней линзы, и
выполнение каждой кромки во множестве кромок смежной со смежной кромкой в смежной передней линзе, и
этап ограничения множества центральных лучей, которые проходят вдоль поля обзора, включает приведение в соответствие угла падения каждого из множества центральных лучей вдоль кромок с углами кромочной поверхности вдоль смежной кромки.
6. Способ по п. 5, где трехмерная форма представляет собой додекаэдр, и передняя линза в каждой из отдельных систем съемки выполнена в форме пятиугольника, при этом кромки формы пятиугольника имеют длину а, диаметр круга, описывающего форму пятиугольника, равен a/sin(36°) = 1,7013а, радиус сферы, вписанной в додекаэдр, равен:
и расстояние от центра додекаэдра к средней точке на кромке передней линзы равно:

7. Система многокамерной панорамной съемки, содержащая:
множество отдельных систем съемки, обладающих полем обзора и расположенных в последовательном массиве, при этом поле обзора каждой из отдельных систем съемки объединено с полем обзора каждой смежной отдельной системы съемки, но не перекрывает его, при этом каждая из отдельных систем съемки содержит оптическую ось и переднюю линзу, выполненную для ограничения множества центральных лучей, которые проходят вдоль кромки поля обзора каждой из отдельных систем съемки на разных высотах лучей по отношению к оптической оси так, чтобы быть по существу параллельными другому множеству центральных лучей, которые проходят вдоль смежной кромки поля обзора непосредственной смежной одной из систем съемки, так что кажется, что все центральные лучи в поле обзора сходятся к общей точке при рассмотрении с объектного пространства.
8. Система многокамерной панорамной съемки по п. 7, где по меньшей мере 50% центральных лучей, которые проходят вдоль смежных кромок поля обзора смежных отдельных систем съемки, отклонены от параллели на двадцать градусов или меньше.
9. Система многокамерной панорамной съемки по п. 7, где каждая из отдельных систем съемки содержит датчик изображения, при этом дополнительно общая точка расположена позади датчика изображения.
10. Система многокамерной панорамной съемки по п. 7, где последовательный массив образует трехмерную геометрическую форму, имеющую центр, передняя линза в каждой из отдельных систем съемки имеет множество кромок, которые определяют множество углов кромочной поверхности в точках вдоль кромок относительно центра трехмерной геометрической формы и средней точки передней линзы, при этом каждая кромка во множестве кромок выполнена смежной со смежной кромкой в смежной передней линзе, и множество углов кромочной поверхности вдоль кромок в каждой из множества кромок соответствуют углу падения каждого из множества центральных лучей вдоль смежной кромки в смежной передней линзе.
11. Система многокамерной панорамной съемки по п. 7, где трехмерная форма представляет собой додекаэдр, и передняя линза в каждой из отдельных систем съемки выполнена в форме пятиугольника, при этом кромки формы пятиугольника имеют длину а, диаметр круга, описывающего форму пятиугольника, равен a/sin(36°) = 1,7013а, радиус сферы, вписанной в додекаэдр, равен:
и расстояние от центра додекаэдра к средней точке на кромке передней линзы равно:

12. Система многокамерной панорамной съемки по п. 7, где передняя линза каждой из отдельных систем съемки является частью одной непрерывной оптики произвольной формы.
13. Система многокамерной панорамной съемки по п. 9, где датчик изображения является датчиком волнового фронта.
14. Система многокамерной панорамной съемки по п. 7, где каждая из отдельных систем съемки имеет изогнутую плоскость изображения для соответствия искажению и кривизне Петцваля системы съемки.
| US 2004051805 A1, 18.03.2004 | |||
| ОПТИЧЕСКАЯ ПАНОРАМИЧЕСКАЯ СИСТЕМА | 2009 |
|
RU2399073C1 |
| Шарнирный узел системы дистанционного управления коробкой передач землеройно-транспортной машины с шарнирно сочлененной рамой | 1988 |
|
SU1593999A1 |
| US2013076900 A1, 28.03.2013. | |||

