Изобретение относится к распознаванию информационных образов и может быть использовано в лазерных локационных системах для распознавания сигналов отраженных от оптико-электронных средств (ОЭС).
Известен способ распознавания лазерных локационных изображения (см., например, [1]), основанный на излучении лазерного локационного сигнала, приеме отраженного лазерного излучения и формировании его изображения, сравнении по выбранному критерию полученного изображения с эталонными и распознавании изображения при совпадении с одним из эталонов. Недостатком этого способа является то, что распознавание оптического сигнала осуществляется путем сравнения с эталонами. Это приводит к росту временных и вычислительных затрат на распознавание при увеличении количества оптических сигналов (изображений) и соответственно эталонов. А также к увеличению вероятности нераспознавания оптического сигнала в случае отсутствия необходимого для этого процесса эталона.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является сокращения времени и повышение эффективности распознавания отраженных от ОЭС сигналов.
Технический результат достигается тем, что в известном способе распознавания локационных оптических сигналов, основанном на излучении лазерного локационного сигнала, приеме отраженного лазерного сигнала, делят принятый отраженный лазерный сигнал на два идентичных потока, измеряют радиус пространственной когерентности первого лазерного потока и радиус сформированного изображения второго лазерного потока, значения которых сравнивают между собой и по их равенству распознают ОЭС, как объект отражения лазерного локационного сигнала.
Сущность изобретения заключается в распознавании ОЭС по результатам сравнения радиусов пространенной когерентности и изображения принимаемых отраженных излучений. При их совпадении принимают решение о принадлежности одного из совокупности принимаемых отраженных сигналов оптико-электронному средству.
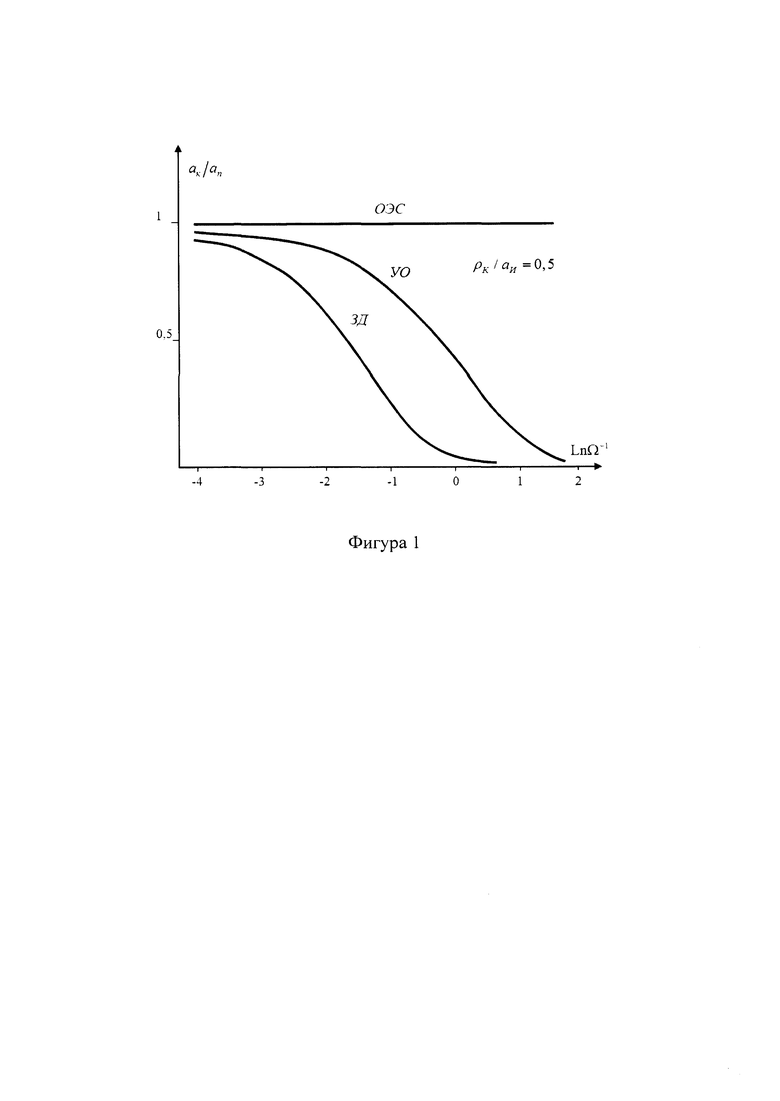
При оптической локации объектов, установлено, что независимо от интенсивности турбулентных флуктуаций показателя преломления воздуха радиус пространственной когерентности локационного сигнала комплексной степени когерентности равен эффективному радиусу изображения (см., например, [2]). Справедливость данного утверждения подтверждается моделированием локации различных объектов: ОЭС, уголкового оптического отражателя (УО) и зеркального диска (ЗД).
Результаты расчетов радиусов пространственной когерентности ак (ак/аn, аn - эффективный радиус пятна подсвета приемной апертуры локатора) сигнала, отраженного от ОЭС, ЗД и УО в зависимости от числа Френеля излучающей апертуры локатора Ω, степени когерентности зондирующего излучения σK/аИ, например, на уровне 0,5 (ρК, аИ - эффективные радиусы пространственной когерентности зондирующего сигнала и излучающей апертуры локатора) приведены на фигуре 1. Из зависимостей следует, что в отличие от локации ОЭС когерентность сигнала, отраженного от УО и ЗД, ухудшается с увеличением числа Френеля излучающей апертуры локатора Ω. Это обусловлено тем, что при локации ОЭС происходит последовательное сглаживание фазовых флуктуаций излучения при его фокусировке приемной линзой ОЭС на отражатель и распространении отраженного сигнала через линзу ОЭС к приемной апертуре локатора. При локации УО и ЗД данные эффекты отсутствуют, что объясняет чувствительность пространственной когерентности отраженных от УО и ЗД сигналов к когерентности зондирующего излучения. Различие в значениях радиусов пространственной когерентности сигналов, отраженных от УО и ЗД объясняется двукратным отражением от граней УО. Описанный эффект является ключевым элементом предлагаемого способа распознавания ОЭС.
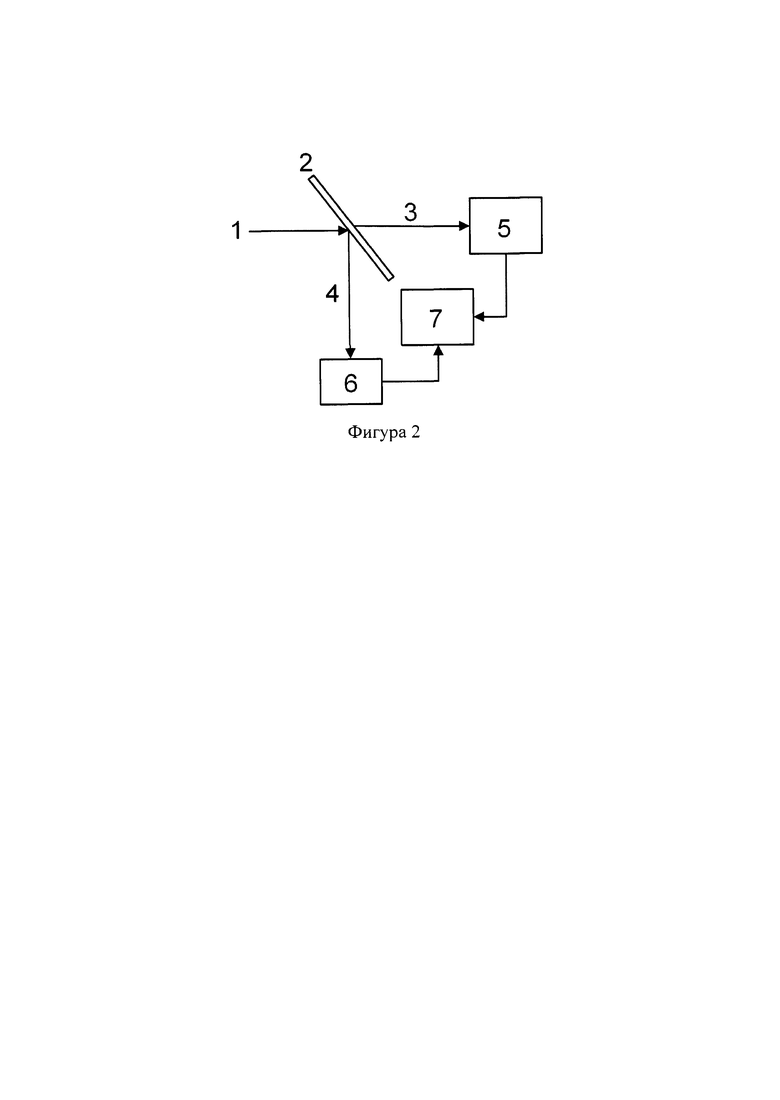
На фигуре 2 представлена схема, поясняющая способ, где: 1 - отраженное от объекта лазерное излучение, 2 - разделительная пластина, 3, 4 - разделенные лазерные потоки отраженного от объекта лазерного излучения, 5 - устройство измерения радиуса изображения R отраженного от объекта лазерного излучения, 6 - устройство измерения радиуса пространственной когерентности ρ отраженного от объекта лазерного излучения, 7 - блок сравнения и обработки. На фигуре 1 упразднено влияние элементов оптического тракта на формирование изображений в плоскости измерительных устройств, не отражающих сущность способа. Отраженное от объекта лазерное излучение 1 делится разделительной пластиной 2 на два потока 3, 4. Один из лазерных потоков 3 поступает на вход устройства измерения радиуса изображения R отраженного от объекта лазерного излучения 5. Второй 4 - поступает на вход устройства измерения радиуса пространственной когерентности ρ отраженного от объекта лазерного излучения 6. Устройство измерения радиуса изображения R отраженного от объекта лазерного излучения 5 измеряет радиус изображения R отраженного от объекта лазерного излучения, значение которого передает в блок сравнения и обработки 7. Устройство измерения радиуса пространственной когерентности ρ отраженного от объекта лазерного излучения 6 измеряет радиус пространственной когерентности ρ отраженного от объекта лазерного излучения, значение которого также передает в блок сравнения и обработки 7. Блок сравнения и обработки 7 сравнивает значения радиусов изображения R и пространственной когерентности ρ отраженного от объекта лазерного излучения и по их совпадению распознает ОЭС, как объект отражения лазерного излучения.
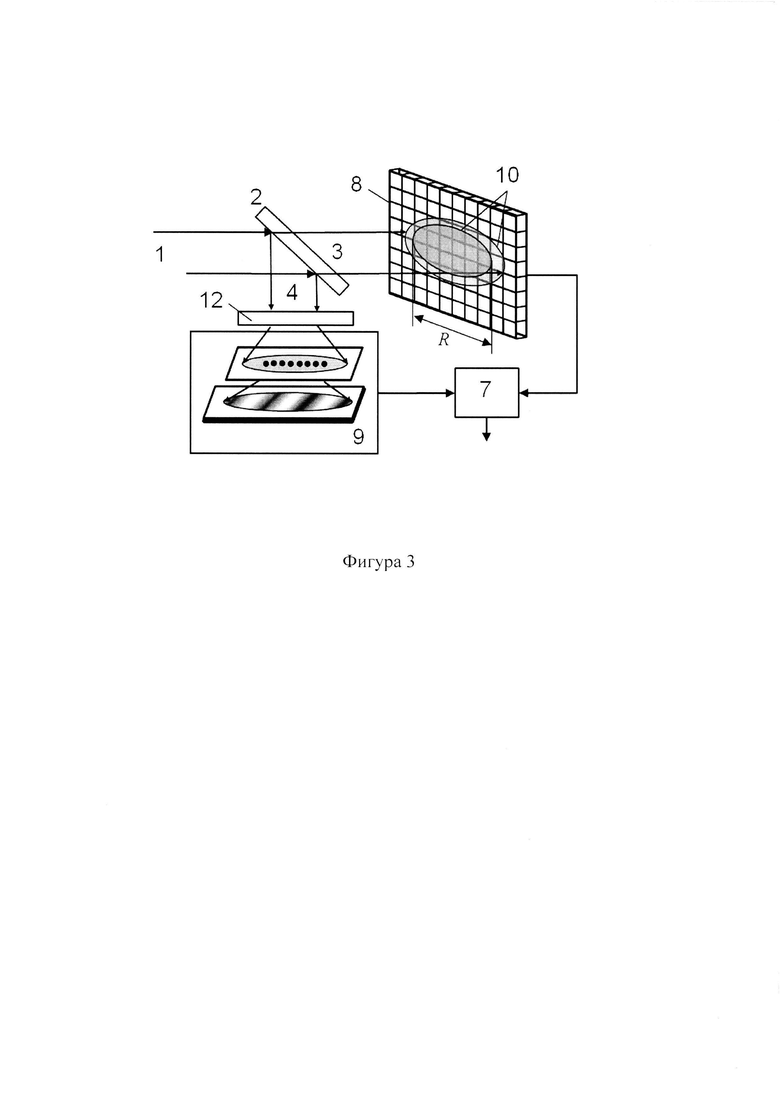
На фигуре 3 представлена блок-схема устройства, с помощью которого может быть реализован предлагаемый способ. Блок-схема устройства включает: 8 - матричное фотоприемное устройство, 9 -интерферометр по принципу Юнга, 10 - сформированное и обработанные изображения отраженного от объекта излучения, 11 - сформированное и обработанные изображения отраженного от объекта излучения, 12 - коллиматор, остальные обозначения соответствуют фигуре 1.
Устройство работает следующим образом. Отраженное от объекта лазерное излучение 1 делится разделительной пластиной 2 на два потока 3, 4. Один из лазерных потоков 3 поступает на вход матричного фотоприемного устройства 8. Второй поток 4 поступает на вход коллиматора 12 и далее на интерферометр по принципу Юнга 9. Матричное фотоприемное устройство формирует изображение 10, осуществляет его пороговую обработку 10 и измеряет радиус изображения отраженного от объекта лазерного излучения, значение которого передает в блок сравнения и обработки 7. Интерферометр по принципу Юнга 9 измеряет радиус пространственной когерентности входного потока с учетом коллимации, значение которого также передает в блок сравнения и обработки 7. Блок сравнения и обработки 7 сравнивает значения радиусов изображения и пространственной когерентности отраженного от объекта лазерного излучения и по их совпадению распознает ОЭС, как объект отражения лазерного излучения.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ распознавания локационных оптических сигналов, основанный на излучении лазерного локационного сигнала, приеме отраженного лазерного сигнала, делении принятого отраженного лазерного сигнала на два идентичных потока, измерении радиуса пространственной когерентности первого лазерного потока и радиуса сформированного изображения второго лазерного потока, сравнении значений которых между собой и распознавании по их равенству ОЭС, как объекта отражения лазерного локационного сигнала.
Таким образом, у заявляемого способа появляются свойства, заключающиеся в сокращения времени и повышение эффективности распознавания отраженных от ОЭС сигналов за счет сравнения значений радиусов изображения и пространственной когерентности отраженного от объекта лазерного излучения. Тем самым предлагаемый авторами способ устраняет недостатки прототипа.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые оптико-электронные и электротехнические узлы и устройства.
1. Хмаров И.М., Кондратов Н.Г., Канивец В.Ю. и др. Патент RU №2584793. Устройство автоматического распознавания малозаметных наземных объектов на основе их 3-d лазерно-локационных изображений. М.: РОСПАТЕНТ, 2016.
2. Глушков А.Н. Когерентность лазерного сигнала, отраженного от ОЭС в случайно-неоднородной среде / А.Н. Глушков, Р.Н. Кравцов, А.Л. Митрофанов // Воронеж: Труды XI МНТК «Радиолокация, навигация, связь», 2005. С. 856-864.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ОПТИКО-ЭЛЕКТРОННЫХ УСТРОЙСТВ ОТ МОЩНОГО ЛАЗЕРНОГО КОМПЛЕКСА | 2021 |
|
RU2772245C1 |
| СПОСОБ ЗАЩИТЫ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ ОТ КОМПЛЕКСОВ ЛАЗЕРНОГО ВОЗДЕЙСТВИЯ С ИСПОЛЬЗОВАНИЕМ ЛОЖНЫХ ОПТИЧЕСКИХ ЦЕЛЕЙ | 2022 |
|
RU2784482C1 |
| СПОСОБ ЛАЗЕРНОГО ГЕТЕРОДИННОГО ПРИЕМА ИЗЛУЧЕНИЙ | 2007 |
|
RU2349930C1 |
| СПОСОБ ЗАЩИТЫ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ ОТ МОЩНЫХ ЛАЗЕРНЫХ КОМПЛЕКСОВ | 2020 |
|
RU2744507C1 |
| Способ обнаружения вибрирующих объектов, основанный на анализе интерференционной картины, получаемой с использованием лазерных локационных станций гетеродинного типа | 2022 |
|
RU2791818C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| СПОСОБ ЗАЩИТЫ ОПТИКО-ЭЛЕКТРОННОГО СРЕДСТВА ЛЕТАТЕЛЬНОГО АППАРАТА ОТ ВОЗДЕЙСТВИЯ МОЩНОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2020 |
|
RU2750652C1 |
| СПОСОБ ИМИТАЦИИ ОПТИКО-ЭЛЕКТРОННОГО СРЕДСТВА | 2018 |
|
RU2712940C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИУСА ПРОСТРАНСТВЕННОЙ КОГЕРЕНТНОСТИ ЛОКАЦИОННЫХ ОПТИЧЕСКИХ СИГНАЛОВ | 2018 |
|
RU2706510C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ МАЛОЗАМЕТНЫХ НАЗЕМНЫХ ОБЪЕКТОВ НА ОСНОВЕ ИХ 3-D ЛАЗЕРНО-ЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ | 2015 |
|
RU2584793C1 |
Изобретение относится к распознаванию информационных образов и может быть использовано в лазерных локационных системах для распознавания сигналов, отраженных от оптико-электронных средств (ОЭС). Способ распознавания локационных оптических сигналов, основанный на излучении лазерного локационного сигнала, приеме отраженного лазерного сигнала, отличается тем, что делят принятый отраженный лазерный сигнал на два идентичных потока, измеряют радиус пространственной когерентности первого лазерного потока и радиус сформированного изображения второго лазерного потока, значения которых сравнивают между собой, и по их равенству распознают оптико-электронное средство как объект отражения лазерного локационного сигнала. Технический результат заключается в повышении эффективности распознавания отраженных от ОЭС сигналов. 3 ил.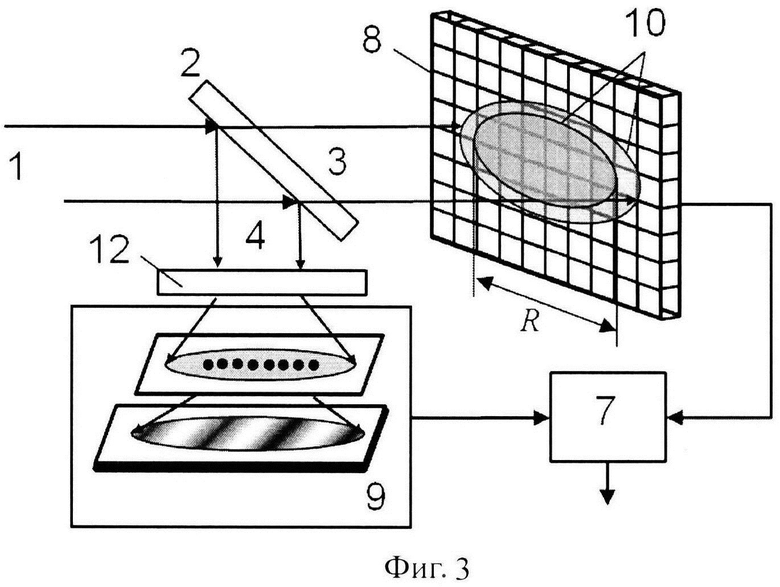
Способ распознавания локационных оптических сигналов, основанный на излучении лазерного локационного сигнала, приеме отраженного лазерного сигнала, отличающийся тем, что делят принятый отраженный лазерный сигнал на два идентичных потока, измеряют радиус пространственной когерентности первого лазерного потока и радиус сформированного изображения второго лазерного потока, значения которых сравнивают между собой, и по их равенству распознают оптико-электронное средство как объект отражения лазерного локационного сигнала.
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ МАЛОЗАМЕТНЫХ НАЗЕМНЫХ ОБЪЕКТОВ НА ОСНОВЕ ИХ 3-D ЛАЗЕРНО-ЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ | 2015 |
|
RU2584793C1 |
| Глушков А.Н | |||
| и др | |||
| "Когерентность лазерного сигнала, отраженного от тОЭС в случайно-неоднородной среде", Воронеж: Труды XI МНТК "Радиолокация, навигация, связь", 2005 | |||
| Устройство для распознавания изображений объектов | 1989 |
|
SU1665395A1 |
| US 4311385 A, 19.01.1982. | |||

