Область техники
Изобретение относится к лазерным локационным системам и может быть использовано для распознавания малозаметных наземных объектов (MHO) с борта беспилотного и пилотируемого летательного аппарата (ЛА).
Уровень техники
Известны способы и устройства /1…5/ автоматического распознавания MHO на основе их 3-D лазерно-локационных изображений.
Основной информацией для распознавания таких объектов является их дальностный портрет, формируемый посредством следующей логической последовательности действий:
- прием изображения от первичных источников информации, которыми могут служить радиолокационные и радиопеленгационные станции, телевизионные камеры, тепловизоры и теплопеленгаторы, а также ручное целеуказание после визуального обнаружения объектов летчиком или штурманом;
- стробирование предварительно разведанных объектов;
- наведение лазерного локационного средства на выбранный участок подстилающей поверхности;
- облучение лазерно-локационным средством выделенной области;
- прием отраженного сигнала на матричное фотоприемное устройство и расчет на каждом элементе матрицы ФПУ дальности до элементарной площадки (пиксела) на подстилающей поверхности и объектов;
- формирование 3-D портрета лоцируемых участков поверхности;
- выделение объекта на фоне подстилающей поверхности;
- определение центра тяжести полученного 3-D портрета объекта и
- распознавание замаскированного объекта на основе сравнения 3-D портрета объекта с библиотекой портретов потенциально опасных объектов.
Наиболее близким к изобретению по назначению и технической сущности является устройство /1/ автоматического распознавания малозаметных наземных объектов на основе их 3-D лазерно-локационных изображений.
Указанное устройство содержит лазерный локатор, включающий оптическую систему, соединенную через лазерное приемопередающее устройство с блоком управления и устройством цифровой обработки отраженных лазерных сигналов.
При этом устройство цифровой обработки отраженных лазерных сигналов выполнено в виде моноблочной бортовой электронно-вычислительной машины (ЭВМ) с использованием последовательного алгоритма обработки сигнальной информации, требующего значительных временных затрат на распознавание.
Недостатком данного устройства /1/ автоматического распознавания малозаметных наземных объектов (MHO) на основе их 3-D лазерно-локационных изображений является относительно невысокая вероятность правильного распознавания замаскированных MHO из-за сильных искаженных их лазерных портретов и недостаточной скоростью алгоритма обработки сигналов известным устройством в условиях ограниченного времени наблюдения объектов с борта ЛА.
Задачей изобретения повышение вероятности правильного распознавания замаскированных MHO с борта ЛА.
Техническим результатом, обеспечивающим решение этой задачи, является повышение производительности обработки сигнальной информации путем ее параллельной переработки за ограниченное количество кадров.
Сущность изобретения
Согласно изобретению устройство автоматического распознавания (УАР) малозаметных наземных объектов (MHO) на основе их 3-D лазерно-локационных изображений содержит лазерный локатор, включающий оптическую систему, соединенную через лазерное приемопередающее устройство с блоком управления и устройством цифровой обработки отраженных лазерных сигналов.
Устройство цифровой обработки отраженных лазерных сигналов выполнено на основе блочной конструкции на перепрограммируемых логических интегральных схемах (ПЛИС) с параллельной обработкой лазерных 3-D сигналов и содержит последовательно соединенные блок первичной и блок вторичной цифровой обработки 3-D сигналов. Блок первичной цифровой обработки 3-D сигналов содержит параллельно соединенные блок определения дальности и угла визирования цели и блок формирования дальностного портрета местности. Выход блока определения дальности и угла визирования цели соединен с первой сигнальной шиной блока вторичной обработки 3-D сигналов, а выход блока формирования дальностного портрета местности - через параллельно соединенные блок пространственно-временной фильтрации, блок амплитудной фильтрации и блок амплитудно-временной фильтрации со второй, третьей и четвертой сигнальной шиной блока вторичной обработки 3-D сигналов. Блок вторичной цифровой обработки 3-D сигналов содержит последовательно соединенные первую сигнальную шину, генератор эталонов, блок распознавания и блок принятия решения и передачи результатов распознавания. Второй вход генератора эталонов соединен с через блок определения «центра тяжести» изображения со вторым входом блока распознавания и дополнительно через блок выделения объектов на подстилающей поверхности - с второй и третьей сигнальными шинами блока вторичной цифровой обработки 3-D сигналов, четвертая сигнальная шина которого соединена через блок определения наличия у цели оптико-электронных средств (ОЭС) или средств противодействия ЛА со вторым входом блока принятия решения. Управляющий вход/выход блока принятия решения, а также управляющие входы/выходы блоков пространственно-временной фильтрации, амплитудной фильтрации и амплитудно-временной фильтрации блока первичной обработки 3-D сигналов и блока распознавания соединены через блок управления с управляющими входами/выходами лазерного локатора, сигнальный выход которого соединен с третьим сигнальным входом блока распознавания.
Выполнение устройства цифровой обработки отраженных лазерных сигналов указанной блочной конструкции на перепрограммируемых логических интегральных схемах (ПЛИС) позволяет проводить параллельную обработкой лазерных 3-D сигналов и тем самым сократить время на их текущую обработку и распознавание MHO. При этом дополнительно обеспечивается определение уровня опасности MHO для ЛА - носителя УАР - за счет возможности регистрации лазерных бликов оптоэлектронной аппаратуры и отражений факелов стартующих твердотопливных ракет MHO. Возможность определения уровня опасности замаскированного MHO, в свою очередь, позволяет повысить живучесть самого ЛА - носителя УАР.
Указанное техническое преимущество позволяет обеспечить достижение заявленного технического результата, заключающегося в повышении производительности обработки лазерных 3-D сигналов. Следствием этого является решение задачи изобретения, заключающейся в повышении вероятности распознавания замаскированных объектов в условиях ограниченного времени их визирования с борта ЛА.
Краткое описание чертежей
На чертеже представлена функциональная схема устройства автоматического распознавания малозаметных наземных объектов на основе их 3-D лазерно-локационных изображений.
Описание в статике
Устройство автоматического распознавания MHO на основе их 3-D лазерных изображений содержит лазерный локатор 1, включающий оптическую систему 2, соединенную через лазерное приемопередающее устройство 3 с блоком управления 4 и с устройством 5 цифровой обработки отраженных лазерных сигналов. Устройство 3 включает матричное фотоприемное устройство (ФПУ) 3.1 и лазерный передатчик 3.1. Устройством 5 цифровой обработки отраженных лазерных сигналов выполнено блочной конструкции на перепрограммируемых логических интегральных схемах (ПЛИС) с параллельной обработкой лазерных 3-D сигналов и содержит последовательно соединенные блок 6 первичной и блок 7 вторичной цифровой обработки 3-D сигналов. Блок 6 первичной цифровой обработки 3-D сигналов содержит параллельно соединенные блок 6.1 определения дальности и угла визирования цели и блок 6.2 формирования дальностного портрета местности. Выход блока 6.1 определения дальности и угла визирования цели соединен с первой сигнальной шиной 7.1 блока 7 вторичной обработки 3-D сигналов, а выход блока 6.2 формирования дальностного портрета местности - через параллельно соединенные блок 6.3 пространственно-временной фильтрации, блок 6.4 амплитудной фильтрации и блок 6.5 амплитудно-временной фильтрации со второй 7.2, третьей 7.3 и четвертой 7.4 сигнальной шиной блока 7 вторичной обработки 3-D сигналов. Блок 7 вторичной цифровой обработки 3-D сигналов содержит последовательно соединенные первую 7.1 сигнальную шину, генератор 7.5 эталонов, блок 7.6 распознавания и блок 7.7 принятия решения и передачи результатов распознавания. Второй вход генератора 7.5 эталонов соединен с через блок 7.8 определения «центра тяжести» изображения со вторым входом блока 7.6 распознавания и дополнительно через блок 7.9 выделения объектов на подстилающей поверхности - с второй 7.2 и третьей 7.3 сигнальными шинами блока 7 вторичной цифровой обработки 3-D сигналов. Четвертая сигнальная шина 7.4 блока 7 соединена через блок 7.10 определения наличия у цели оптико-электронных средств (ОЭС) или средств противодействия ЛА со вторым сигнальным входом блока 7.7 принятия решения. Сигнальный выход лазерного приемопередающего устройства 2 лазерного локатора 1 соединен третьим сигнальным входом блока 7.6 распознавания. Управляющие входы/выходы лазерного локатора 1 через блок 4 управления соединены с управляющими входами блоков 6.3, 6.4, 6.5 блока 6 первичной обработки 3-D сигналов, а также - с управляющим входом блока 7.7 блока 7 вторичной обработки 3-D сигналов.
Описание в динамике
Устройство автоматического распознавания малозаметных наземных объектов (MHO) на основе их 3-D лазерно-локационных изображений работает следующим образом.
На основе данных внешнего целеуказания или обнаружения MHO с борта беспилотного или пилотируемого летательного аппарата (ЛА) производится наведение оптической системы 2 локатора 1 на область обнаружения MHO. После захвата и устойчивого сопровождения выделенной области включается лазерный локатор 1. При этом происходит облучение лазерным передатчиком 3.2 локатора 1 выделенной области. Отраженный от облученной области лазерный 3-D сигнал принимается матричным фотоприемным устройством (ФПУ) 3.1, оцифровывается и передается в блок 6.1 и 6.2. В блоке 6.1 производится расчет 121 дальности до каждой элементарной площадки (пиксела) на подстилающей поверхности и цели для каждого элемента матрицы ФПУ 3.1. Одновременно в блоке 6.2 происходит формирование /3/ дальностного портрета облучаемого участка местности. Полученные портреты поступают одновременно на блок 6.3 пространственно-временной фильтрации, на блок 6.4 амплитудной фильтрации и на блок 6.5 амплитудно-временной фильтрации. Далее результаты указанной фильтрации с блоков 6.3, 6.4 и 6.5, а также расчетные данные дальности и угла места визирования цели передаются через соответствующие шины 7.2, 7.3, 7.4 и 7.1 на блок 7 вторичной обработки 3-D сигналов. На основе данных сигналов на шинах 7.2 и 7.3 и сигналов программного управления, поступающих с блока 4 на шину 7.5, в блоке 7.9 производится выделение /4/ МНЦ на подстилающей поверхности и передача их на первый вход блока 7.8. Одновременно на основе данных о дальности и угле места визирования обнаруженного МНЦ производится генерация /2/ эталонов замаскированных объектов в блоке 6.1 и передача их в блок 7.8 и в блок 7.6. Далее на основе сравнения 3-D лазерных изображений эталонов и выделенных объектов на подстилающей поверхности в блоке 7.8 производится определение /3/ центра тяжести изображения обнаруженного объекта и передача его на распознавание в блок 7.6. По полученным данным и по командам управления блока 4 производится суммарная обработка измеренных 3-D портретов, сравнение их с библиотекой портретов в памяти блока 7.6 распознавания /4/ и выдача результатов сравнения на блок 7.7 пользователю для принятия решения о распознавании MHO. Одновременно на второй вход блока 7.7 через блок 7.10 с блока 6.5 амплитудно-временной фильтрации выдаются сигналы о наличии у MHO светоотражающих элементов типа оптико-электронных средств (ОЭС) или средств противодействия (например, по лазерному отражению от факела стартующей твердотопливной ракеты). В блоке 7.7 производится комплексная обработка полученных из блоков 7.6 и 7.10 данных и выработка решения о типе МНЦ и уровне ее опасности. Далее результаты 3-D распознавания блока 7.7 о замаскированных и потенциально опасных объектах передаются с борта ЛА наземным и воздушным потребителям информации по соответствующим линиям радио и/или модемной связи.
Изобретение разработано на уровне макетного образца. Проведены его лабораторные и полевые испытания. Испытания показали достижение заявленного технического результата и решение поставленной задачи по обнаружению наземных объектов, спрятанных в лесном массиве, а также объектов, расположенных на открытом пространстве и закрытых маскировочной сеткой. При этом одновременно повысилась производительность, качество и надежность распознавания замаскированных наземных объектов.
Литература
1. D.H. Titterton, S.M. Kirkpatrick, R. Stoian, R. Appleby, J.M. Chamberlain, K.A. Krapels. Review of laser sensing devices and systems. Technologies for Optical Countermeasures II; Femtosecond Phenomena II; Passive Millimetre-Wave & Terahertz Imaging II, Proc. of SPIE Vol. 5989, 598903, (2005).
2. Хмаров И.М., Канивец В.Ю., Прохоров A.B., Прохоров В.А., Кондратов Н.Г. Информационно-расчетные системы для определения лазерно-локационных характеристик объектов // Программные продукты и системы. 2010. №4. С. 140-142.
3. Хмаров И.М., Канивец В.Ю., Кондратов Н.Г. Метод автоматического распознавания малозаметных наземных целей бортовыми лазерными локационными средствами // Успехи современной радиоэлектроники. 2010. №11. С. 86-91.
4. Хмаров И.М., Канивец В.Ю., Кондратов Н.Г., Трухнов С.В. Устройство для распознавания объектов по их трехмерным лазерным изображениям. Патент RU №105043 от 27.05.2011.
5. Хмаров И.М., Канивец В.Ю., Кондратов Н.Г. Математическая модель для выбора технических параметров, обеспечивающих заданные информационные показатели качества лазерных локационных средств. Свидетельство на программу для ЭВМ, RU №2011610366 от 11.01.2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЭЛЕКТРОННАЯ ИСПЫТАТЕЛЬНАЯ СТАНЦИЯ | 2014 |
|
RU2579771C2 |
| Система идентификации распознаваемых объектов на участках земной поверхности с использованием беспилотного летательного аппарата | 2024 |
|
RU2828178C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С АДАПТИВНЫМ ВЫБОРОМ МОМЕНТА АНАЛИЗА ОТРАЖЕННОГО СИГНАЛА | 2008 |
|
RU2377596C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| Способ распознавания ложных (имитирующих) целей в многопозиционной радиолокационной станции с широкополосным зондирующим сигналом | 2020 |
|
RU2755993C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ ВОЗДУШНОГО ОБЪЕКТА С ПОВЫШЕННОЙ ИНФОРМАТИВНОСТЬЮ НА УЧАСТКАХ ЕГО ПРОСТРАНСТВЕННО-УГЛОВОГО ЗАМИРАНИЯ | 2015 |
|
RU2603694C1 |
Изобретение относится к лазерным локационным системам и может быть использовано для распознавания замаскированных малозаметных наземных объектов (MHO) с борта пилотируемого или беспилотного летательного аппарата (ЛА). Устройство содержит лазерный локатор 1, включающий оптическую систему 2, соединенную через лазерное приемопередающее устройство 3 с блоком управления 4 и с устройством 5 цифровой обработки отраженных лазерных сигналов. Устройство 5 выполнено блочной конструкции на перепрограммируемых логических интегральных схемах (ПЛИС) с параллельной обработкой лазерных 3-D сигналов. Принцип распознавания MHO в блоке 5 основан на приеме отраженных от подстилающей поверхности лазерных ответных сигналов, формирование на их основе лазерных 3-D портретов, сравнении полученных портретов с банком данных 3-D эталонов (лазерных портретов типовых MHO) и принятии решения об обнаружении потенциально опасного MHO на основе совпадения портретов с эталонами и обнаружения у MHO светоотражающей оптики и/или средств активного противодействия ЛА. Технический результат - повышение вероятности распознавания MHO, покрытых маскировочной сеткой, а также спрятанных под кронами деревьев в лесном массиве. 1 ил.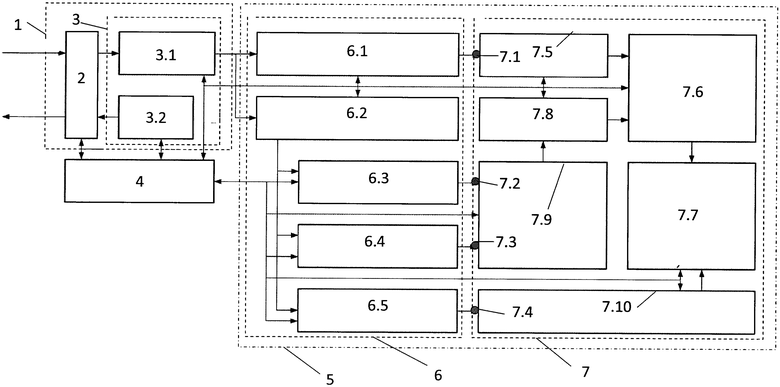
Устройство автоматического распознавания малозаметных наземных объектов (MHO) на основе их 3-D лазерно-локационных изображений содержит лазерный локатор, включающий оптическую систему, соединенную через лазерное приемопередающее устройство с блоком управления и устройством цифровой обработки отраженных лазерных сигналов, отличающееся тем, что устройство цифровой обработки отраженных лазерных сигналов выполнено блочной конструкции на перепрограммируемых логических интегральных схемах (ПЛИС) с параллельной обработкой лазерных 3-D сигналов и содержит последовательно соединенные блок первичной и блок вторичной цифровой обработки 3-D сигналов, блок первичной цифровой обработки 3-D сигналов содержит параллельно соединенные блок определения дальности и угла визирования цели и блок формирования дальностного портрета местности, которого соединен с первой сигнальной шиной блока вторичной обработки 3-D сигналов, а выход блока формирования дальностного портрета местности - через параллельно соединенные блок пространственно-временной фильтрации, блок амплитудной фильтрации и блок амплитудно-временной фильтрации со второй, третьей и четвертой сигнальной шиной блока вторичной обработки 3-D сигналов, блок вторичной цифровой обработки 3-D сигналов содержит последовательно соединенные первую сигнальную шину, генератор эталонов, блок распознавания и блок принятия решения и передачи результатов распознавания, причем второй вход генератора эталонов соединен с через блок определения «центра тяжести» изображения со вторым входом блока распознавания и дополнительно через блок выделения MHO на подстилающей поверхности - с второй и третьей сигнальными шинами блока вторичной цифровой обработки 3-D сигналов, четвертая сигнальная шина которого соединена через блок определения наличия у MHO оптико-электронных средств (ОЭС) или средств противодействия со вторым входом блока принятия решения, управляющий вход/выход которого, а также управляющие входы/выходы блоков пространственно-временной фильтрации, амплитудной фильтрации и амплитудно-временной фильтрации блока первичной обработки 3-D сигналов, блока распознавания соединены через блок управления с управляющими входами/выходами лазерного локатора, сигнальный выход которого соединен с третьим сигнальным входом блока распознавания.
| Машина для срезания излишков затяжной кромки на обуви с глухой затяжкой | 1956 |
|
SU105043A1 |
| Устройство для распознавания изображений объектов | 1989 |
|
SU1665395A1 |
| RU 2010113697 A, 28.09.1993 | |||
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |

