Изобретение относится к области оптической локации, может быть использовано для обнаружения вибрирующих объектов на фоне подстилающей земной поверхности, их идентификации и применяться в системах оптической локации, траекторных измерений, выдачи команд целеуказания системам управления вооружением.
Обнаружение объектов на фоне подстилающей поверхности является сложной задачей локации, особенно в оптическом диапазоне длин волн, так как интегральные коэффициенты отражения (ρ) поверхностей элементов ландшафта имеют близкие значения для излучения одной длины волны. Например, для длины волны 
Известен способ лазерной локации (см. пат. РФ №2296350, G01S 17/02. Бюл. №9 от 27.03.2007), предназначенный для измерения текущих координат и скорости преимущественно низколетящих крылатых ракет, на фоне водной поверхности, когерентным оптическим доплеровским локатором с непрерывным немодулированным излучением. Способ заключается в зондировании дифракционно ограниченного объекта, движущегося над поверхностью моря (океана), немодулированным излучением одночастотного лазера непрерывного действия и многоканальной когерентной обработкой принимаемых излучений матричным фотоприемным устройством с определением доплеровских сдвигов частоты в переотраженном излучении и последующей многоканальной параллельной согласованной фильтрацией выделенных радиосигналов. При этом когерентному приему и обработке дополнительно и одновременно подвергают отраженные от нескольких бликов морской поверхности излучения, поступающие на фотоприемную матрицу с разных произвольно распределенных угловых направлений. Отметим следующие недостатки данного способа: 1) невозможность обнаружения неподвижных вибрирующих объектов на фоне земной подстилающей поверхности; 2) отсутствие возможности идентификации классов и типов объектов.
Известен способ лазерной локации реализованный в лидарном ветровом профилометре ПЛВ-300 (М. Андреев, Д. Васильев, М. Пенкин, С. Смоленцев, А. Борейшо, Д. Клочков, М. Коняев, А. Орлов, А. Чугреев. Когерентные доплеровские лидары для мониторинга ветровой обстановки // Фотоника. 2014. № 6. С. 20-28.), предназначенный для измерения скорости и направления ветра на заданных высотах. Способ заключается в зондировании атмосферы сигналом оптического диапазона длин волн с известной частотой. Зондирующий сигнал отражается (рассеивается) от частиц, увлекаемых ветровым потоком, вызывающее изменение его частоты. Отраженный сигнал поступает на вход одноэлементного приемника и подвергается гетеродинной обработке с выделением разностной частоты, пропорциональной скорости движения воздушных масс. Отметим следующие недостатки данного способа: 1) отсутствие возможности обнаружения неподвижных вибрирующих объектов на фоне подстилающей земной поверхности, 2) невозможность определения классов и типов лоцируемых объектов.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является возможность обнаружения и идентификации неподвижных вибрирующих объектов на фоне подстилающей земной поверхности.
Упомянутый результат достигается тем, что в способе обнаружения и идентификации неподвижных вибрирующих объектов на фоне подстилающей земной поверхности, включающем излучение в направлении исследуемой области зондирующего сигнала оптического диапазона длин волн, прием отраженного сигнала, оптическое гетеродинирование принимаемого сигнала и формирование на его основе интерференционной картины на поверхности матричного фотоприемника (МФП), что позволяет получить вибрационное изображение лоцируемого объекта, которое окрашивается в соответствии с частотой и амплитудой вибрации его элементов поверхности. Формируемое вибрационное изображение является уникальным для каждого класса и типа объекта.
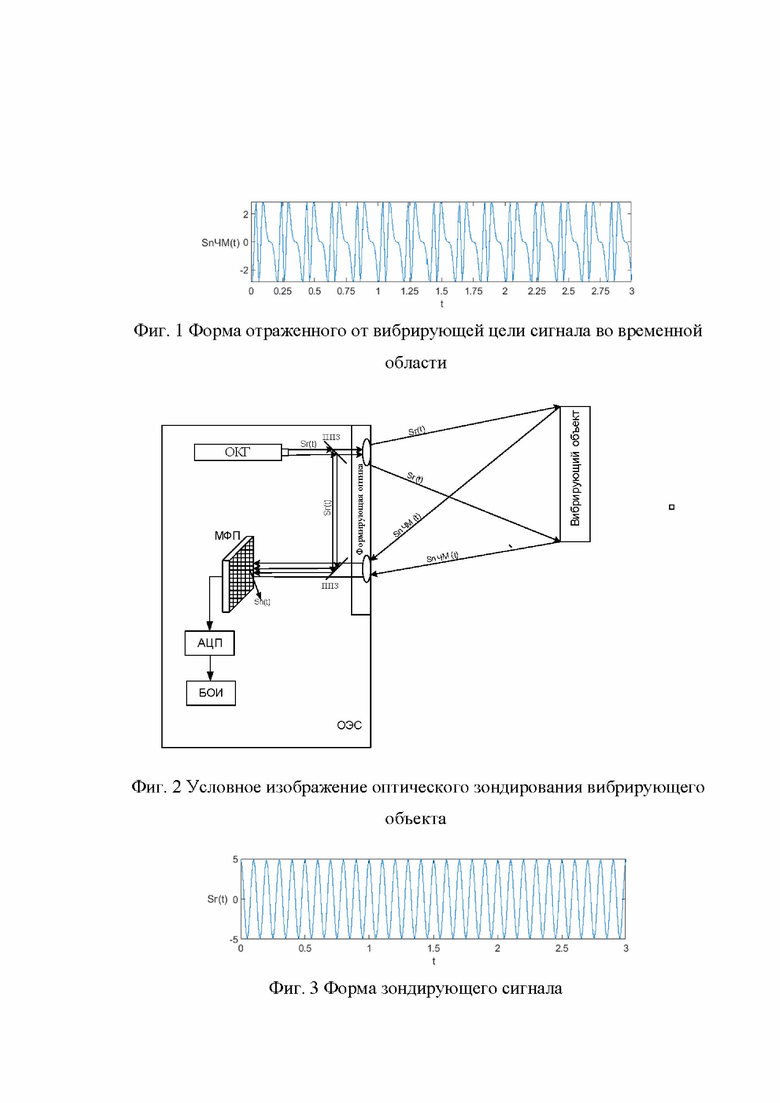
В общем случае форма отраженного от элемента поверхности вибрирующей цели сигнала, приходящего на элемент МФП, во временной области (Фиг. 1) представляет собой частотную модуляцию (ЧМ), описываемую аналитическим выражением следующего вида:

где 

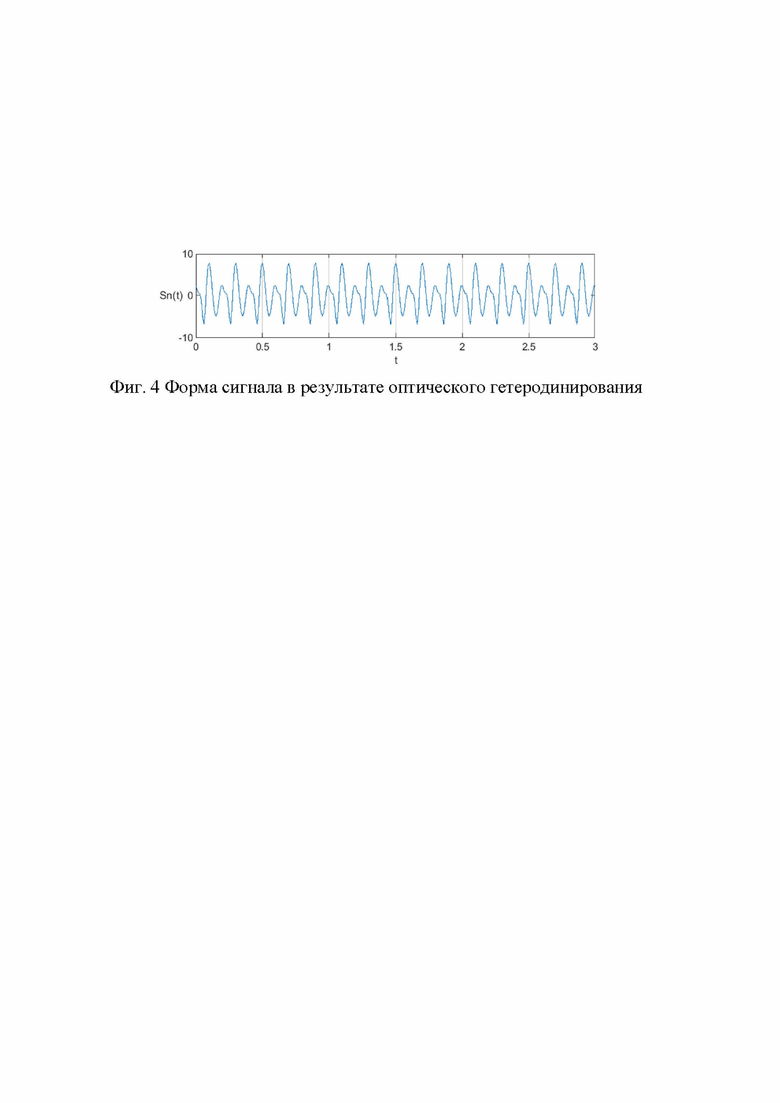
В оптико-электронной системе (ОЭС) источником зондирующего сигнала (Фиг. 2) выступает оптический квантовый генератор (ОКГ). Зондирующий сигнал (Фиг. 3) представляет собой гармоническое колебание, часть из которого полупрозрачным зеркалом (ППЗ) отводиться для гетеродинирования:


где 




Возможно использование ОКГ, работающего в импульсном режиме, что позволяет увеличить дальность обнаружения объектов, однако, необходимо обеспечить такую длительность зондирующих импульсов (τ), при которой будет обеспечиваться корректная работа матричного фотоприемника (МФП), то есть выполняться условие вида:

где 
Сигнал в результате оптического гетеродинирования (Фиг. 4) описывается следующим выражением:

Результирующий сигнал, полученный в результате интерференции опорной волны гетеродина и принимаемой волны, представляет собой последовательность всплесков амплитуды, период следования которых определяет частоту вибрации элемента поверхности лоцируемого объекта. Совокупность сигналов с элементарных приемников МФП, характеристики которых зависят от частоты и амплитуды вибрации элементов поверхности лоцируемых объектов оцифровываются в аналого-цифровом преобразователе (АЦП) и передаются в блок обработки информации (БОИ), который формирует вибрационное изображение, уникальное для каждого объекта (Фиг.2).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ обнаружение и идентификации неподвижных вибрирующих объектов на фоне подстилающей земной поверхности, основанный на анализе интерференционных картин на поверхности МФП и формировании на их основе вибрационного изображения неподвижных лоцируемых объектов, получаемого с использованием лазерных локационных станций гетеродинного типа.
Предложенный способ может быть реализован с использованием типовых оптических и радиотехнических узлов и устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения направления на источник лазерного излучения по проекции луча в плоскости наблюдения | 2022 |
|
RU2791421C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| СПОСОБ ЛАЗЕРНОГО ГЕТЕРОДИННОГО ПРИЕМА ИЗЛУЧЕНИЙ | 2007 |
|
RU2349930C1 |
| СТЕРЕОСКОПИЧЕСКИЙ КОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2016 |
|
RU2627550C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ В ЛАЗЕРНОМ КОГЕРЕНТНОМ ЛОКАТОРЕ С МАТРИЧНЫМ ФОТОПРИЕМНИКОМ | 2007 |
|
RU2354994C1 |
| ДАЛЬНОМЕР ДЛЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038612C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЛЕТЯЩИХ КРЫЛАТЫХ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2009 |
|
RU2422852C1 |
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2006 |
|
RU2335785C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278399C2 |
Использование: изобретение относится к области оптической локации, может быть использовано для обнаружения вибрирующих объектов на фоне подстилающей земной поверхности, их идентификации и применяться в системах оптической локации, траекторных измерений, выдачи команд целеуказания системам управления вооружением. Технический результат: возможность обнаружения и идентификации неподвижных вибрирующих объектов на фоне подстилающей земной поверхности. Сущность: в способе осуществляют излучение зондирующего сигнала оптического диапазона длин волн, оптический гетеродинный прием отраженного сигнала и формирование интерференционной картины, анализ параметров которой позволяет осуществить обнаружение и идентификацию неподвижных вибрирующих целей на фоне подстилающей земной поверхности. 3 з.п. ф-лы, 4 ил.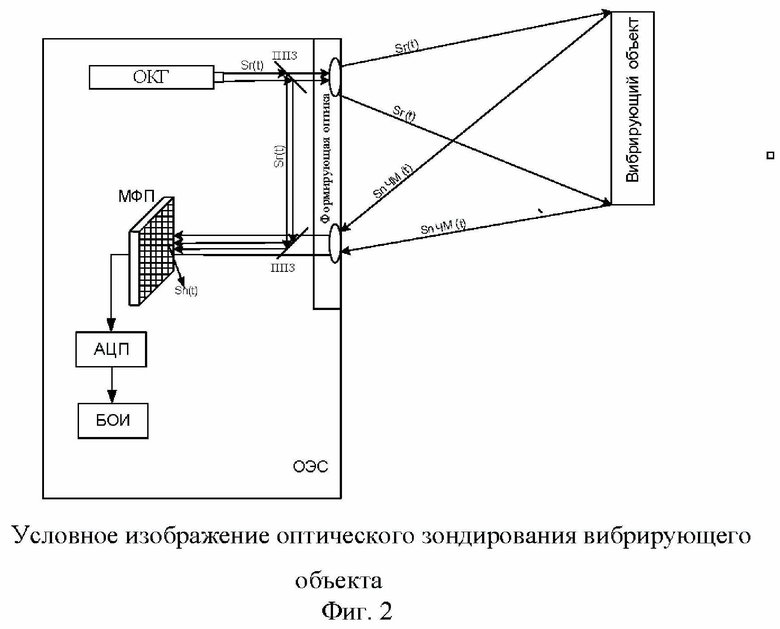
1. Способ обнаружения и идентификации неподвижных вибрирующих объектов на фоне подстилающей поверхности, включающий излучение в направлении исследуемой области зондирующего сигнала оптического диапазона длин волн, прием отраженного сигнала, отличающийся тем, что в результате оптического гетеродинирования принимаемого сигнала формируется интерференционная картина на поверхности матричного фотоприемника (МФП), позволяющая получить вибрационное изображение лоцируемого объекта, которое окрашивается в соответствии с частотой и амплитудой вибрации его элементов поверхности, полученное изображение предоставляет возможность обнаружить и идентифицировать класс и тип неподвижных вибрирующих объектов на фоне подстилающей поверхности.
2. Способ по п. 1, отличающийся тем, что зондирующий сигнал формируется источником когерентного оптического излучения.
3. Способ по п. 1, отличающийся тем, что обнаружение и идентификация объектов происходит на фоне подстилающей земной поверхности.
4. Способ по п. 1, отличающийся тем, интерференция принимаемого и опорного сигналов происходит в каждом элементарном приемнике МФП.
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ НЕПОДВИЖНЫХ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ ИСКУССТВЕННОГО ПРОИСХОЖДЕНИЯ | 2018 |
|
RU2696006C1 |
| US 5923423 A, 13.07.1999 | |||
| CN 110361752 A, 22.10.2019 | |||
| US 5579108 A, 26.11.1996 | |||
| US 5113065 A, 12.05.1992 | |||
| WO 2019032430 A1, 14.02.2019. | |||

