Изобретение относится к способам, предназначенным для изменения формы и размеров конструкций, а более конкретно - к способам, которые обеспечивают линейно-упругие изменения формы и размеров конструкций за счет воздействия на них исполнительных механизмов, и может быть использовано для компенсации искажений формы и размеров конструкций, вызванных различными внешними воздействиями.
Активное управление линейно-упругими перемещениями точек конструкций путем механического деформирования применяется для изменения формы и размеров конструкций, в том числе, с целью компенсации искажений, вызванных различными внешними воздействиями: силами резания и температурными полями в технологическом оборудовании, температурными полями и силами тяжести в оптических системах, сейсмическими воздействиями на здания и сооружения, аэродинамическими силами на обшивку самолета, силами тяжести в устройствах прецизионного позиционирования и другими.
Известны способы активного управления, основанные на модальном разложении поля управляемых линейно-упругих перемещений. В соответствии с ними исполнительные механизмы воздействуют на конструкции, чтобы обеспечить изменения их формы и размеров, соответствующие требуемой суперпозиции собственных форм - мод -колебаний этой конструкции (Meirovitch L., Silverberg L.M. Control of structures subjected to seismic excitation // Journal of Engineering Mechanics, Vol. 109, 1983, p. 604-618; патент США №9073623 G01C 23/00; Diez 17; US 6375127; EP 0802438 A2). Преимущества модального управления связаны с тем, что в силу ортогональности моды не зависят друг от друга и могут управляться индивидуально. Это повышает точность управления: при задании перемещений, соответствующих суперпозиции определенных форм, система управления не создает перемещений, соответствующих другим формам. Увеличивается также быстродействие управления, так как не требуется дополнительных операций по компенсации нежелательных изменений.
Указанные выше способы предназначены для реализации динамических линейно-упругих изменений формы и размеров конструкций.
Известен способ (Cho М.К. Active optics performance study of the primary mirror of the Gemini Telescopes Project // Optical Telescopes of Today and Tomorrow, SPIE Vol. 2871, 1997, p. 272-290), воздействия исполнительных механизмов в виде сил или перемещений задаются таким образом, чтобы обеспечить на отражающей поверхности деформируемого зеркала квазистатические перемещения, соответствующие требуемой для компенсации искажений суперпозиции собственных форм колебаний зеркала. Точность данного способа ограничена, так как используемые в нем собственные формы колебаний зеркала не являются ортогональными формами деформации зеркала в условиях квазистатического нагружения. Последнее объясняется тем, что собственные формы колебаний конструкции зависят от фактического распределения массы по ее объему, в то время как при квазистатическом нагружении инерционно-массовые характеристики не оказывают никакого влияния на перемещения, вызываемые исполнительными механизмами. Кроме того, в данном способе приходится использовать ограниченное количество собственных форм колебаний зеркала, поскольку они образуют теоретически бесконечный ряд и при численном конечно-элементном моделировании определяется очень большое число таких форм, равное числу степеней свободы конечно-элементной модели.
Аналогом по технической сущности, взятым в качестве прототипа, является способ (патент РФ №2623661, кл. G02B 26/08, 2015). В нем предусматривается измерение аберраций волнового фронта оптической системы и преобразование результатов этих измерений в набор команд для оптической системы, включающей элемент в виде управляемого деформируемого зеркала и исполнительные механизмы, предназначенные для линейно-упругого деформирования управляемого зеркала, воздействие исполнительных механизмов на зеркало в виде сил или перемещений, обеспечивающее создание на отражающей поверхности деформируемого зеркала перемещений, соответствующих требуемой для компенсации аберраций волнового фронта суперпозиции собственных форм колебаний имитатора зеркала, имеющего такую же геометрическую форму и такие же упругие свойства, как само деформируемое зеркало, но обладающего нулевой плотностью и закрепленными в местах подсоединения исполнительных механизмов единичными сосредоточенными массами, учитываемыми только в направлении приложения усилий от исполнительных механизмов в соответствии с специальными зависимостями.
Преимущества данного способа связаны с тем, что ортогональные собственные формы колебаний имитатора зеркала, число которых равно числу воздействий исполнительных механизмов, воспроизводят условия квазистатического нагружения реального деформируемого зеркала в оптической системе, в результате чего при задании создаваемых исполнительными механизмами сил или перемещений, обеспечивающих реализацию суперпозиции этих форм, в конструкции не возникает дополнительных перемещений, снижающих точность компенсации. Однако точность компенсации в этом способе остается ограниченной. Это связано с тем, что, поскольку число собственных форм колебаний имитатора зеркала, равное числу команд для исполнительных механизмов, может не совпадать с числом компенсируемых оптических аберраций, то в этом способе приходится выполнять вносящее погрешности псевдообращение неквадратной матрицы чувствительности аберраций волнового фронта к перемещениям отражающей поверхности деформируемого зеркала, соответствующим различным собственным формам колебаний. Кроме того, данный способ применим только для оптических систем.
Техническим результатом настоящего изобретения является повышение точности управления квазистатическими линейно-упругими изменениями формы и размеров конструкций любого назначения.
Технический результат достигается тем, что в способе управления квазистатическими линейно-упругими перемещениями конструкций, предусматривающем измерение изменений формы и размеров конструкций и преобразование этих изменений в воздействия исполнительных механизмов, предназначенных для деформирования конструкций, исполнительные механизмы прикладывают воздействия в виде сил или перемещений, число которых равно числу параметров компенсируемых изменений формы и размеров конструкции, создание исполнительными механизмами во всей реальной конструкции перемещений, соответствующих суперпозиции собственных форм колебаний имитатора конструкции, имеющего такую же геометрическую форму и такие же упругие свойства, как сама деформируемая конструкция, но обладающего нулевой плотностью и закрепленными в местах подсоединения исполнительных механизмов единичными сосредоточенными массами, учитываемыми только в направлении приложения усилий от исполнительных механизмов, и определение воздействий исполнительных механизмов в соответствии со следующими зависимостями

где Fi - вектор воздействий исполнительных механизмов в виде сил или перемещений, Mij - квадратная матрица чувствительности сил или перемещений, создаваемых исполнительными механизмами, к коэффициентам собственных форм колебаний имитатора конструкции размером n×n, Cj - вектор, состоящий из n коэффициентам собственных форм колебаний имитатора конструкции размером, Njk - квадратная матрица коэффициентов пропорциональности коэффициентов собственных форм колебаний имитатора конструкции по отношению к параметрам формы и размеров конструкции размером n×n, Ek - вектор, состоящий из т параметров формы и размеров конструкции.
Суть изобретения заключается в том, исполнительные механизмы прикладывают воздействия в виде сил или перемещений, число которых равно числу параметров компенсируемых изменений формы и размеров конструкции, и, поскольку воздействия исполнительных механизмов рассчитываются в зависимости от коэффициентов собственных форм имитатора конструкции, число которых также равно числу воздействий исполнительных механизмов и которые всецело воспроизводят процесс квазистатического линейно-упругого деформирования реальной конструкции, то в результате не возникает никаких дополнительных погрешностей, снижающих точность компенсации.
Предлагаемый способ реализуется следующим образом:
а) методом численного модального анализа имитатора управляемой деформируемой конструкции определяются собственные формы колебаний имитатора и квадратная матрица чувствительности воздействий исполнительных механизмов к коэффициентам собственных форм колебаний имитатора конструкции, Mij;
б) методом линейной аппроксимации определяется квадратная матрица коэффициентов пропорциональности коэффициентов собственных форм колебаний имитатора конструкции по отношению к параметрам формы и размеров конструкции, Njk;
в) при работе конструкции выполняется измерение вызванных внешними воздействиями изменения параметров формы и размеров конструкции, компенсация которых осуществляется, и преобразование результатов измерений в набор воздействий исполнительных механизмов, чтобы обеспечить требуемую компенсацию, в соответствии с зависимостями
Fi=MijCj, Cj=NjkEk;
г) реализация воздействий исполнительными механизмами путем деформирования конструкции.
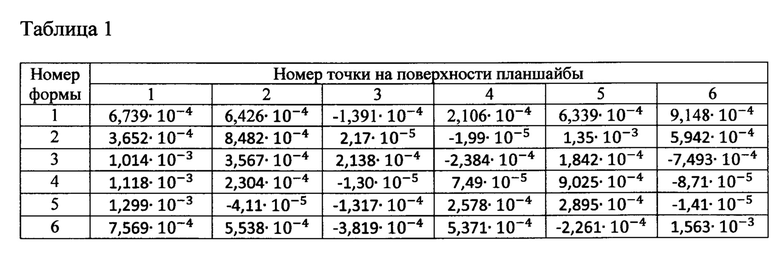
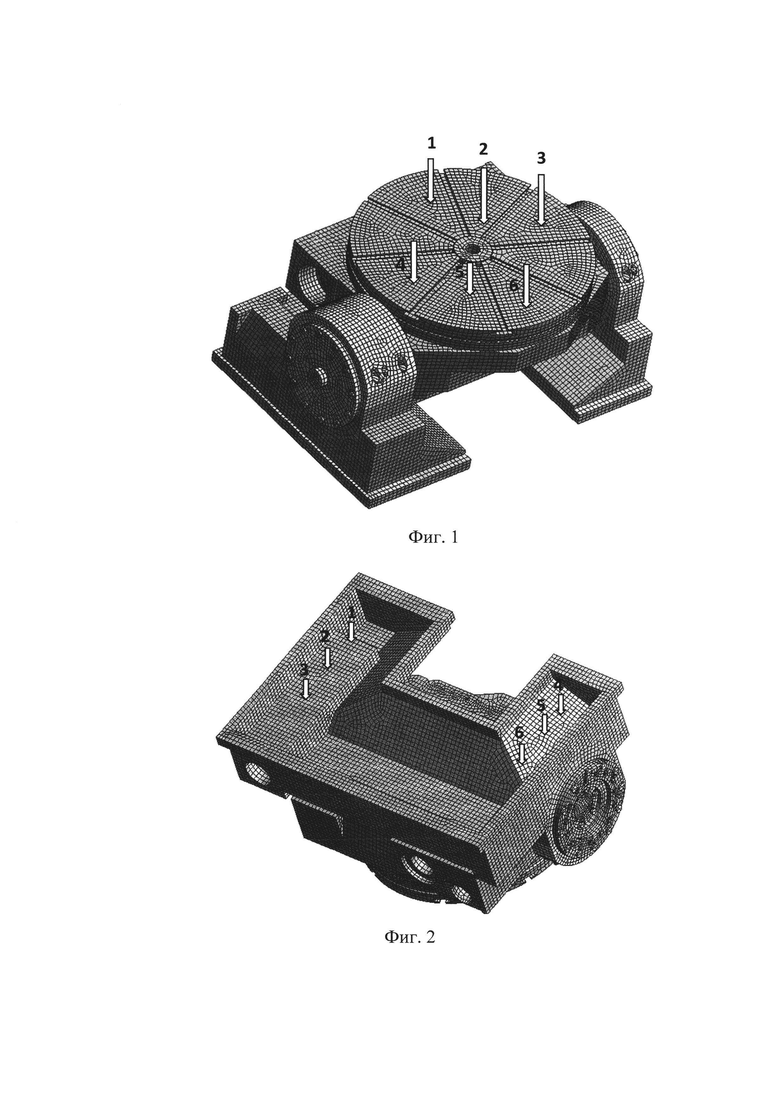
В качестве примера рассмотрели прецизионный поворотный стол, конечно-элементная модель которого показана на фиг. 1 и 2. Управление осуществляется шестью параметрами - перпендикулярными к поверхности планшайбы станка перемещениями шести точек данной поверхности. Расположение этих точек показано на фиг. 1 стрелками, цифрами приводится их нумерация. Исполнительные механизмы - шесть пьзоактюаторов - крепятся к основанию стола. Точки крепления исполнительных механизмов и направления их воздействия показаны стрелками на фиг. 2, цифрами приводится нумерация механизмов.
Перемещения каждой из шести точек на поверхности планшайбы, соответствующие собственным формам колебаний имитатора, приводятся в таблице 1 в миллиметрах.
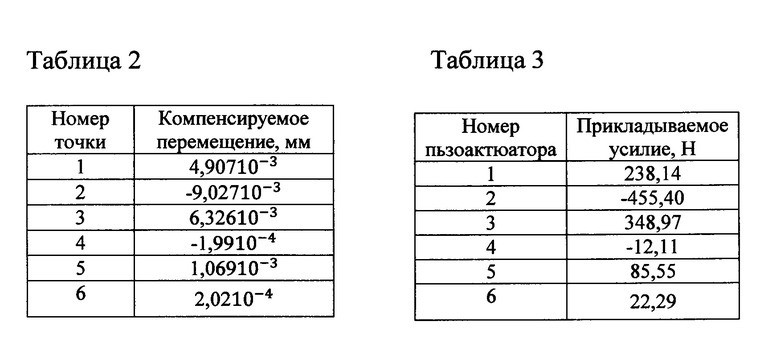
Пример набора перемещений в точках на поверхности планшайбы, которые необходимо компенсировать, приводится в таблице 2. Полученные с помощью изложенного способа необходимые для компенсации этих перемещений значения усилий пьезоактюаторов сведены в таблицу 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ОПТИЧЕСКИХ АБЕРРАЦИЙ С ИСПОЛЬЗОВАНИЕМ ДЕФОРМИРУЕМОГО ЗЕРКАЛА | 2015 |
|
RU2623661C2 |
| Способ проведения модальных испытаний многосегментных нежестких конструкций | 2017 |
|
RU2662255C1 |
| СПОСОБ РЕКОНСТРУКЦИИ ТРЕХМЕРНОГО ОБРАЗА ФИЗИЧЕСКОГО СОСТОЯНИЯ ОБЪЕКТА МОНИТОРИНГА В ИЗМЕРИТЕЛЬНОЙ ТОЧКЕ | 2010 |
|
RU2542589C2 |
| ДЕФОРМИРУЕМОЕ ЗЕРКАЛО | 1988 |
|
SU1841096A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОСТЕНД И ВИБРАТОР РЕЗОНАНСНОГО ТИПА | 2007 |
|
RU2334966C1 |
| Деформируемое зеркало | 1986 |
|
SU1841178A1 |
| ДЕМПФИРОВАНИЕ ЭЛЕКТРОМАГНИТНЫХ КОЛЕБАНИЙ В СИСТЕМАХ ЭНЕРГОСНАБЖЕНИЯ | 2008 |
|
RU2461944C2 |
| Способ определения собственных частот и форм колебаний свободной конструкции по результатам испытаний этой конструкции с наложенными связями | 2019 |
|
RU2728329C1 |
| ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2009 |
|
RU2517954C2 |
| КОНСТРУКЦИОННЫЙ СПОСОБ ОГРАНИЧЕНИЯ ИНТЕНСИВНЫХ РЕЖИМОВ ПЛЯСКИ ПРОВОДОВ ВОЗДУШНЫХ ЛЭП | 2008 |
|
RU2387063C1 |
Изобретение относится к способам управления, предназначенным для изменения формы и размеров конструкций. Способ модального управления квазистатическими линейно-упругими перемещениями конструкций заключается в следующим. Предусматривают измерение изменений формы и размеров конструкций и преобразование этих изменений в воздействия исполнительных механизмов, предназначенных для деформирования конструкций. Исполнительные механизмы прикладывают воздействия в виде сил или перемещений, число которых равно числу параметров компенсируемых изменений формы и размеров конструкции. Создают исполнительными механизмами во всей конструкции перемещения, соответствующие суперпозиции собственных форм колебаний имитатора конструкции, имеющего такую же геометрическую форму и такие же упругие свойства, как сама деформируемая конструкция, но обладающего нулевой плотностью и закрепленными в местах подсоединения исполнительных механизмов единичными сосредоточенными массами, учитываемыми только в направлении приложения усилий от исполнительных механизмов. Технический результат заключается в повышении точности управления квазистатическими линейно-упругими изменениями формы и размеров конструкции. 2 ил., 3 табл.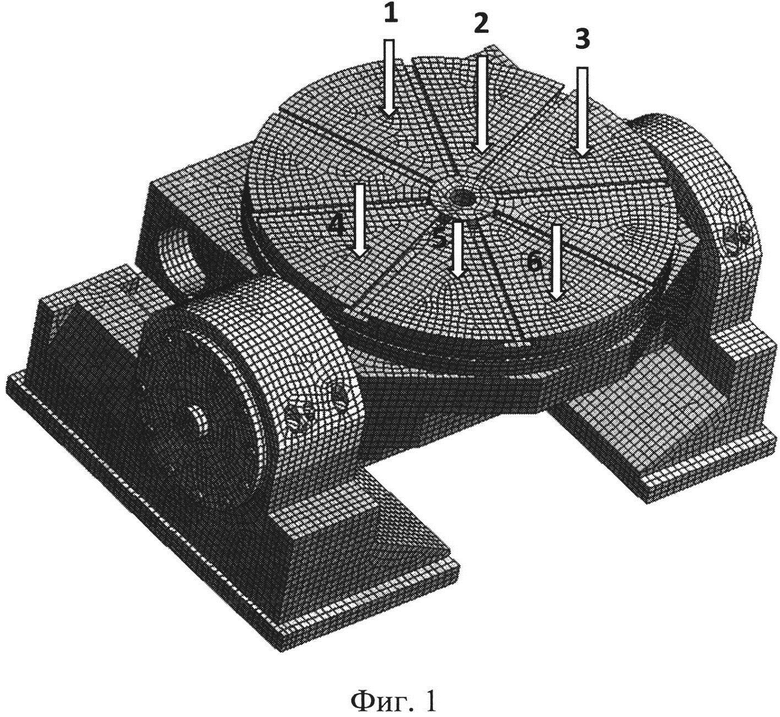
Способ модального управления квазистатическими линейно-упругими перемещениями конструкций, предусматривающий измерение изменений формы и размеров конструкций и преобразование этих изменений в воздействия исполнительных механизмов, предназначенных для деформирования конструкций, создание исполнительными механизмами во всей конструкции перемещений, соответствующих суперпозиции собственных форм колебаний имитатора конструкции, имеющего такую же геометрическую форму и такие же упругие свойства, как сама деформируемая конструкция, но обладающего нулевой плотностью и закрепленными в местах подсоединения исполнительных механизмов единичными сосредоточенными массами, учитываемыми только в направлении приложения усилий от исполнительных механизмов, отличающийся тем, исполнительные механизмы прикладывают воздействия в виде сил или перемещений, число которых равно числу параметров компенсируемых изменений формы и размеров конструкции, и тем, что воздействия исполнительных механизмов определяются в соответствии со следующими зависимостями
Fi=MijCj, Cj=NjkEk; i,j,k=1,…,n,
где Fi - вектор, состоящий из n воздействий исполнительных механизмов в виде сил или перемещений, Mij - квадратная матрица чувствительности воздействий исполнительных механизмов к коэффициентам собственных форм колебаний имитатора конструкции размером n×n, Cj - вектор, состоящий из n коэффициентов собственных форм колебаний имитатора конструкции размером, Njk - квадратная матрица коэффициентов пропорциональности коэффициентов собственных форм колебаний имитатора конструкции по отношению к параметрам формы и размеров конструкции размером n×n, Ek - вектор, состоящий из m параметров формы и размеров конструкции.
| СПОСОБ КОМПЕНСАЦИИ ОПТИЧЕСКИХ АБЕРРАЦИЙ С ИСПОЛЬЗОВАНИЕМ ДЕФОРМИРУЕМОГО ЗЕРКАЛА | 2015 |
|
RU2623661C2 |
| ЗЕРКАЛО ОПТИЧЕСКОЕ | 1995 |
|
RU2106002C1 |
| CN 107240422 A, 10.10.2017 | |||
| US 9073623 B1, 07.07.2015. | |||

