Область техники
Настоящее изобретение относится к устройству для прямого измерения компонент тензора гравитационного градиента, в частности недиагональных компонент тензора, и к способу измерения упомянутых компонент тензора.
Уровень техники
Гравитационная градиентометрия представляет собой измерение поля гравитационных градиентов перепада ускорений между двумя бесконечно близкими пространственными точками. Поле гравитационных градиентов описывается тензором второго ранга Tij:

где i, j=(x, y, z), а скалярная величина V представляет собой гравитационный потенциал местной системы ортогональных декартовых координат (x, y, z). Приняв, что ось z направлена вертикально в землю, компоненты тензора в некоторой точке в местной системе координат (x, y, z), рассчитанные посредством определения пространственных скоростей изменения вдоль направлений x, y и z пространственной скорости изменения гравитационного потенциала в направлениях x, y и z, представляют скорости изменения гравитационного ускорения вдоль этих направлений. К примеру, компонента Tyz представляет скорость изменения вдоль направления y гравитационного ускорения по направлению z к земле и обычно измеряется в этвешах (1 этвеш=1 Э=10-9 с-2). Тензор состоит из девяти компонент, из которых только пять полностью независимы вследствие их геометрической симметрии (т.е. Tij=Tji, где i≠j) и вследствие справедливости уравнения Лапласа (т.е. Txx+Tyy+Tzz=0) для полей гравитационного потенциала вне источников гравитационного поля.
Обеспечение устройств, позволяющих проводить точные и абсолютные измерения различных компонент тензора гравитационного градиента Tij, очень важно для разработки нефтегазовых месторождений и освоения различных других природных ресурсов. В частности, гравитационная градиентометрия позволяет составить карту изменений плотности пород геологической среды и залежей ископаемых, чтобы облегчить определение мест проведения разведочных работ и повысить эффективность бурения в нефтегазовой и горнодобывающей отраслях. Гравитационная градиентометрия находит, далее, применение в оборонной и космической отраслях для целей навигации и разведки (например, обнаружения пустот), в геологоразведочных работах, в подводной навигации и разведке, в наземной и морской археологии, в медицине и исследовании космоса (например, для получения карт плотности астероидов и других орбитальных тел солнечной системы).
Для многих применений гравитационной градиентометрии именно компонента Tzz (т.е. производная второго порядка гравитационного потенциала в вертикальном направлении) является целью измерения многих градиентометров либо посредством прямого измерения, либо посредством измерения, по меньшей мере, некоторых из других компонент тензора и пересчетом их в Tzz по связывающей их зависимости, либо обоими этими способами. Однако Веряшкин (Veryaskin) и Макри (McRae) в их статье 'On the combined gravity gradient modeling for applied geophysics' («О моделировании комбинированного гравитационного градиента в прикладной геофизике»), Journal of Geophysics и Engineering, 2008, Vol 5, pp. 348-356, показали, что посредством измерения и использования двух недиагональных компонент Txz и Tyz тензора гравитационного градиента можно получить больше информации об аномальных скачках плотности в геологической среде, чем посредством измерения и использования вертикальной компоненты Tzz гравитационного градиента. Для получения этой информации о плотности геологической среды требуется такой градиентометр, который способен одновременно выдавать в реальном времени наборы данных прямого измерения обеих компонент Txz и Tyz тензора.
Способ измерения абсолютной величины компонент тензора гравитационного градиента был впервые изобретен бароном Лорандом фон Этвешем еще в 1890 году; в способе использовались крутильные весы с пробными массами, висящими на разной высоте от горизонтального коромысла, подвешенного на тонкой нити. Гравитационные градиенты приводят к тому, что на массы действуют разные силы, создавая в результате крутящий момент, воздействующий на коромысло, и, таким образом, угловое отклонение масс, которое может быть обнаружено подходящим датчиком. Может быть достигнута чувствительность около 1 Э, но измерение требует нескольких часов на одну позицию вследствие необходимости расчета компонент гравитационного градиента исходя из, по меньшей мере, пяти независимых измерений углового отклонения, каждое - с другим углом азимута.
На практике устройства, созданные в соответствии с этим базовым способом Этвеша, велики, громоздки, мало защищены от фоновых шумов окружающей среды и, таким образом, требуют специально созданных условий для измерения. Это исключает всякую возможность использования их на движущемся носителе и во многих практических применениях, где имеются весовые или пространственные ограничения, например в узких скважинах, в беспилотных летательных аппаратах, в полезной нагрузке ракет-носителей, в спутниках и планетоходах.
Другой способ измерения абсолютной величины компонент тензора гравитационного градиента, который усовершенствует вышеуказанный способ, был изобретен Форвардом (Forward) в 1960-х годах (см. патенты США 3 722 284 (Forward и др.) и 3 769 840 (Hansen)). Этот способ включает установку гантельного осциллятора и датчика смещения на платформе, которая находится в равномерном горизонтальном вращении с некоторой частотой Ω вокруг оси нити крутильного маятника. Затем создаются вынужденные колебания гантели с двойной частотой вращения, в то время как многие источники ошибок и источники шумов модулируются частотой вращения или не модулируются (в частности, шум типа 1/f). Амплитуда вынужденных колебаний максимальна, когда частота вращения удовлетворяет условию резонанса 2Ω=ω0, где ω0 - это резонансная угловая частота, а добротность Q осциллятора стремится к бесконечности. В отличие от способа без вращения этот способ позволяет быстро определять значения Tyy-Txx и Txy посредством выделения квадратурных составляющих отклика, используя синхронное детектирование с опорным сигналом частоты 2Ω.
Те же принципы могут быть непосредственно использованы, как предложено Мецджером (Metzger) (см. патент США 3 564 921), если заменить гантельный осциллятор двумя или большим количеством одиночных акселерометров, надлежащим образом сориентированными на такой движущейся платформе. В этом решении нет принципиально новых особенностей по сравнению с предшествующим за исключением того, что выходы пар акселерометров требуют дополнительной балансировки.
Устройства, использующие этот способ, были созданы, но они принесли больше проблем, чем преимуществ, в основном, в силу необходимости поддерживать строго равномерное вращение и измерять малые смещения во вращающейся системе координат. На этих устройствах была достигнута максимальная рабочая точность около нескольких десятков этвеш для интервала измерения в одну секунду, и они крайне чувствительны к вибрационным шумам окружающей среды вследствие их сравнительно низких резонансных частот. Преодолеть возникающие при этом технологические проблемы так трудно, что существующие усовершенствованные конструкции вращающихся гравитационных градиентометров дают точность измерения, которая много ниже предельных теоретических оценок.
В документе WO-A-96/10759 описываются способ и устройство для измерения двух недиагональных компонент тензора гравитационного градиента. Согласно этому документу поперечный прогиб неподвижной гибкой струны с закрепленными концами в ее второй основной моде колебаний (моде 'S', как показано на ФИГ. 10b) связан с недиагональным гравитационным градиентом, тогда как ее прогиб в первой основной моде колебаний (моде 'С', см. ФИГ. 10а) связан с эффективным (т.е. усредненным с некоторой весовой функцией вдоль длины струны) поперечным гравитационным ускорением. Другими словами, струна с закрепленными концами изгибается в ее моде 'S' только гравитационным градиентом, при условии, что она не совершает никаких угловых движений. Поэтому посредством измерения абсолютной величины механического смещения такой струны, которое соответствует моде 'S', можно измерить абсолютную величину недиагональной компоненты (т.е. Txz или Tyz, для струны, вытянутой вдоль оси z) тензора гравитационного градиента. Хотя в этом документе описано применение одномерной 'струны', подходит любой произвольный элемент, ширина и толщина которого много меньше, чем его длина, например плоская лента.
В этой конструкции градиентометра, включающей токонесущую струну или ленту длины l, вытянутую вдоль оси z и характеризующуюся однородным распределением массы на единицу длины на всем ее протяжении, смещение y(z,t) струны от ее невозмущенного положения (т.е. от прямой линии, соединяющей точки ее закрепления на обоих концах), например в y-направлении местной системы координат как функция от z-положения единичного элемента и от времени t, может быть описано следующим уравнением баланса сил для вибрирующей струны. (Нужно обратить внимание, что аналогичное уравнение и последующий анализ применимы к ортогональному направлению поперек струны и к любому числу других направлений.)

где thermal noise - термический шум
Члены в правой части уравнения представляют силы, действующие на струну (включая гравитационные и магнитные силы) в y-направлении, а члены в левой части уравнения представляют силы восстановления положения струны в y-направлении.
Уравнение имеет граничные условия, соответствующие закрепленным концам струны, т.е. y(0,t)=y(l,t)=0. В этом уравнении η обозначает массу струны на единицу длины, h представляет собой коэффициент трения на единицу длины, а параметры Y, А и Δl/l представляют собой модуль Юнга струны, площадь поперечного сечения и натяжение струны соответственно. Величина gy(0,t) представляет собой абсолютную величину y-компоненты гравитационного ускорения, a Tyz(0,f) представляет собой соответствующую компоненту тензора гравитационного градиента вдоль струны, причем обе величины взяты в центре выбранной местной системы координат (т.е. в точке z=0). Величина I(t) представляет собой ток, протекающий по струне. Хорошо известно, что на проводник, сквозь который течет ток I(t), в неоднородном магнитном поле с вектором магнитной индукции В(x, y, z) действует сила F=I(t) {n×В(x, y, z)}, где n представляет собой единичный вектор в направлении протекания тока, в данном случае в направлении z. Следовательно, величины Bx(0, t) и Bxz(0, t) представляют соответственно абсолютную величину x-компоненты магнитного поля и соответствующую компоненту тензора магнитного градиента вдоль струны, причем обе взяты в центре выбранной местной системы координат.
Так как струна подвержена броуновским флуктуациям, в правую часть уравнения (3) включен соответствующий источник возбуждения термического шума.
Что касается компонент гравитационной силы уравнения (3), -ηgy(0,t) представляет силу в y-направлении, действующую на единичный элемент струны вследствие гравитационного ускорения, a -ηTyz(0,t)z представляет силу в y-направлении, действующую на единичный элемент струны вследствие изменения гравитационного ускорения вдоль направления z.
Применив гармонический анализ к сложной конфигурации струны, вызванной ее взаимодействием с гравитационным и магнитным полями, функцию y(z,t) можно описать в интервале от z=0 до z=l бесконечной суммой синусоидальных функций с периодом 21 с соответствующими коэффициентами cy(n,t). Таким образом, решение уравнения (3) баланса вибрационных сил, которое удовлетворяет указанным выше граничным условиям, может быть представлено следующей суммой (4), в которой каждый член с индексом n соответствует одной из собственных колебательных мод струны.

Подставив уравнение (4) в уравнение (3), умножив левую и правую части на sin(πn'z/l) и затем проинтегрировав обе части по z от 0 до l, можно получить следующее дифференциальное уравнение (4) для cy(n,t).

где thermal noise - термический шум, величины
представляют собственные частоты струны, а τ и ρ - время релаксации и объемная массовая плотность струны соответственно.
Когда n принимает четные значения (т.е. для членов cy(n,t) бесконечной суммы в уравнении (4), соответствующих антисимметричным колебательным модам струны, имеющей узел в точке z=l/2, средней точке струны), силовая составляющая уравнения (5), включающая gy(0,t) и Bx(0, t), равна нулю, а силовая составляющая, являющаяся функцией компоненты Tyz тензора гравитационного градиента и компоненты Bxz(0, t) тензора градиента магнитного поля, остается. Таким образом, для антисимметричных мод струны (т.е. для n=четное число) cy зависит только от Tyz и Bxz(0, t) (и термического шума).
Практически это означает, что амплитуда cy антисимметричных синусоидальных компонент прогиба струны в y-направлении, y(z,t), зависит только от величины компоненты Ty тензора гравитационного градиента и компоненты Bxz(0, t) тензора градиента магнитного поля.
У струны есть эффективная ширина полосы механических колебаний, ограничивающая ее отклик по смещению колебаниями ниже нескольких кГц (даже для крайне жестких струн). Сила, действующая на струну из-за градиента магнитного поля, зависит от тока, текущего по струне. Поэтому, если не пропускать сквозь струну никакого тока вообще или пропускать сквозь струну переменный ток с частотой, достаточно далекой от ее механической полосы, то струна будет эффективно нечувствительна к градиентам магнитного поля, так как колебания на таких частотах затухают. Таким образом обеспечивается струна, чувствительная только к компоненте Ty тензора гравитационного градиента.
Средняя точка струны, z=l/2, представляет собой положение узла во всех антисимметричных колебательных модах струны. Если датчики расположены в продольном направлении симметрично относительно этой точки, это даст возможность опознать смещения струны, соответствующие собственным антисимметричным колебательным модам струны, не учитывая при этом смещения, соответствующие симметричным колебательным модам струны.
Это особенно предпочтительно, если датчики смещения расположены в точках z=l/4 и 2=3l/4, соответствующих пучностям первой антисимметричной колебательной моды струны, n=2 (мода 'S'). В этих точках смещение струны, соответствующее моде 'S', максимально и, следовательно, измерительный сигнал градиентометра также будет максимален, обеспечивая оптимальную чувствительность.
В документе WO 96/10759 две воспринимающие катушки прямоугольной формы в виде сверхпроводящих квантовых интерференционных датчиков (SQUID, superconducting quantum interference device) используются для того, чтобы обнаружить поперечное смещение сверхпроводящей напряженной ниобиевой струны, удерживаемой за концы внутри сверхпроводящего кожуха, при этом все устройство охлаждается до 4,2К или ниже в криогенном сосуде с жидким гелием. Соленоиды, расположенные симметрично у обоих концов струны, возбуждаются переменным сигналом с частотой Ω, чтобы индуцировать переменный ток сверхпроводимости в струне, также имеющий частоту Ω. Сверхпроводящий кожух исключает наличие в нем внешних магнитных полей, так что на струну не действуют какие-либо силы магнитного поля, и смещение струны от ее прямолинейной конфигурации происходит только как отклик на гравитационное поле. Две катушки датчиков SQUID размещены в непосредственной близости от струны, расположены в продольном направлении симметрично с обеих сторон от средней точки струны и включены в цепь как два плеча сверхпроводящего трансформатора магнитного потока. Переменный ток сверхпроводимости, текущий в струне, индуцирует в каждой катушке датчиков SQUID ток, пропорциональный смещению струны в этой точке от ее невозмущенного положения. Если положения и отклики двух катушек подобраны так, что два плеча трансформатора магнитного потока полностью сбалансированы по обе стороны от средней точки струны, то отклик будет «в противофазе», так что симметричные моды струны (т.е. моды с n=нечетное число, включая основную моду 'С') не вызовут никакого тока сигнала в трансформаторе потока. Из антисимметричных мод доминирующей в отклике смещения струны будет мода 'S' с n=2, а всеми модами высших порядков можно пренебречь (или отнести их к источникам ошибок); отсюда следует, что выходное напряжение датчика SQUID представляет собой переменный сигнал с частотой Ω и амплитудой, пропорциональной смещению струны только в первой антисимметричной моде 'S' и, следовательно, недиагональной компоненте гравитационного градиента (в приведенном выше примере Tyz(0,t)). Амплитуду этого выходного сигнала датчика SQUID получают посредством синхронного детектирования сигнала с использованием переменного сигнала возбуждения соленоидов в качестве опорного. Предусмотрена также цепь силовой обратной связи, которая на входе использует выходное напряжение датчика SQUID и индуцирует в струне ток обратной связи, вызванный этим выходным напряжением, для увеличения чувствительности устройства к компоненте гравитационного градиента. Для градиентометра этой конструкции с типовыми практическими параметрами расчетный теоретический минимум обнаружимого гравитационного градиента составляет 0,02 Э. Струнный гравитационный градиентометр менее чувствителен к вибрационному шуму, чем прежние вращающиеся градиентометры, и пригоден для размещения на подвижной платформе, причем измерения для получения данных о местных различиях гравитационного градиента могут быть проведены с высоким разрешением. Однако трудность размещения заключается в том, что линейные и угловые ускорения подвижной платформы влияют на деформацию струны и выходной сигнал устройства.
В документе WO 03/27715 конструкция струнного градиентометра усовершенствована посредством предложения гравитационного градиентометра, в котором струна выполнена в виде однородной металлической полосы или ленты, причем ее перемещения ограничены в средней точке положением покоя, например, с помощью жестких призм, смонтированных на кожухе и касающихся ленты, но не оказывающих на нее никакой силы. Эти призмы ограничивают всякое движение ленты в этой точке и добавляют еще одно граничное условие, приводя к тому, что деформация струны во всех симметричных модах (т.е. когда n=нечетное число) ограничена, в то время как деформация во всех антисимметричных модах (т.е. когда n=четное число), включая доминантную моду 'S', разрешена. Следует отметить, что деформация ленты в симметричной моде первого порядка "С", которая является доминантной в других случаях, значительно ограничена. Такое применение ленты вместо струны отличается тем, что лента больше ограничена в своем движении; это делает выходной сигнал устройства менее зависимым от линейных ускорений, воздействующих на устройство, и более управляемым. Благодаря этому устройство больше подходит для работы на подвижных платформах. Устройство работает в криогенной ванне с жидким азотом при 77К, что снижает воздействия термического шума и увеличивает механическую устойчивость. Вместо датчиков SQUID предусмотрены две воспринимающие катушки, расположенные симметрично относительно средней точки ленты и включенные как два плеча резонансной мостовой схемы, настроенной на несущую частоту переменного несущего сигнала, подаваемого на ленту в виде переменного тока. Частота переменного тока несущего сигнала, подаваемого на ленту, выше полосы механических частот напряженной ленты, так что отклик смещения ленты вследствие сил взаимодействия с окружающим магнитным полем гасится, и детектируемый сигнал зависит только от гравитационного поля. Две эти катушки расположены в непосредственной близости от пучностей первой антисимметричной моды ленты (т.е. вблизи точек z=L/4 и z=3L/4), которые соответствуют максимальному смещению, что увеличивает чувствительность отклика. В мостовой схеме индуцируется сигнал напряжения с той же частотой, что и у несущего сигнала, амплитуда которого является мерой среднего прогиба ленты на участках, располагающихся вокруг точек L/4 и 3L/4. Посредством синхронного детектирования амплитуды напряжения наведенного сигнала с опорой на несущий сигнал может быть получена амплитуда местной недиагональной компоненты гравитационного градиента. Отклик ленты модулируется прямоугольным импульсом посредством косвенных изменений ее жесткости между высоким значением и низким значением. Это достигается посредством использования прямоугольного импульса для переключения цепи отрицательной обратной связи, предназначенной для периодического создания в ленте сигнала тока, пропорционального выходу мостовой схемы, но в противофазе с ним или со сдвигом по фазе на 90°, так что лента становится жестче и приводится в положение покоя ленты. При высокой жесткости или в напряженном состоянии отклик детектора на гравитационные градиенты мал, а при низкой жесткости или в ослабленном состоянии отклик детектора на гравитационные градиенты велик. Этот модулированный выход получают с использованием синхронного усилителя. Предусматривают три набора из четырех одноосных градиентометрических модулей в «зонтичной» схеме расположения, чтобы убрать влияние углового ускорения на выходной сигнал комбинированного устройства, которое способно выдавать абсолютные и прямые замеры всех компонент тензора гравитационного градиента.
В этих струнных гравитационных градиентометрах способность струны одновременно деформироваться в моде 'S' и в других «паразитных» симметричных модах вводит в градиентометрическое устройство значительный источник шума. Чувствительность градиентометра может быть увеличена посредством хорошей балансировки двух детекторных катушек по обе стороны от средней точки струны для взаимной компенсации этих нежелательных паразитных мод. Однако эта балансировка не устраняет влияние, которое деформация струны в ее симметричных модах оказывает на детекторы, и эти нежелательные паразитные моды дают значительный вклад в уровень шума, по превышению над которым должен быть обнаружен градиентометрический сигнал, создаваемый деформацией струны в ее антисимметричных (т.е. при n=четное число) модах колебаний.
Как описано выше, в документе WO 03/027715 раскрыто одно решение этой проблемы посредством установки призм у средней точки струны с целью добавления еще одного граничного условия посредством ограничения струны в ее положении покоя в этой точке. Это работает на удержание струны от деформирования в ее симметричных модах, в особенности в ее моде 'С'. Однако струна сохраняет возможность деформироваться в моде W колебаний (показанной на ФИГ. 10с), которая является линейной суммой прогибов во всех оставшихся симметричных модах. Хотя прогиб в этой моде W меньше по амплитуде, чем общий прогиб неограниченной струны без призм во всех симметричных модах, прогиб в моде 'W' остается значительным источником шума, который может ограничить рабочую чувствительность устройства к сигналам гравитационного градиента.
Задача настоящего изобретения заключается в предложении устройства для измерения гравитационных градиентов, имеющего высокую чувствительность к гравитационному градиенту и низкую чувствительность к абсолютному гравитационному ускорению.
Раскрытие изобретения
Согласно одному из аспектов настоящего изобретения предлагается устройство для измерения квазистатических гравитационных градиентов, включающее напряженную гибкую ленту, удерживаемую за оба конца; средства регистрации, предназначенные для обнаружения поперечного смещения ленты от невозмущенного положения под действием гравитационного поля, действующего на указанную ленту, и для генерации сигнала, отражающего такое смещение; и средства вывода, связанные с указанными средствами регистрации и в качестве ответа на указанный сигнал смещения генерирующие выходной сигнал, являющийся функцией тензора гравитационного градиента гравитационного поля, причем лента характеризуется неоднородным распределением жесткости и/или массы по своей длине, так что в ходе функционирования усилен отклик смещения ленты на гравитационный градиент гравитационного поля и/или подавлен отклик смещения ленты на абсолютное гравитационное ускорение гравитационного поля.
Известные градиентометрические устройства имеют струнные или ленточные чувствительные элементы с однородными распределениями жесткости и массы. Это приводит к равномерному, или стандартному, отклику смещения на приложенные силы, вызывая колебания чувствительного элемента в его различных модах, во всех без исключения.
Согласно настоящему изобретению высокая чувствительность градиентометра к сигналам гравитационного градиента обеспечивается лентой с переменным распределением жесткости и/или массы по длине ленты.
Под распределением жесткости понимается изменение по длине ленты силы, требующейся для деформирования ленты на одну и ту же величину в направлении ее колебаний.
Под распределением массы понимается изменение по длине ленты массы на единицу длины ленты.
Благодаря созданию ленты с переменным распределением жесткости и/или массы по ее длине, так что деформация ленты в ее симметричных модах колебаний подавлена, влияние абсолютного гравитационного ускорения на смещение ленты мало и вклад «гравиметрической» составляющей в сигнал, обнаруживаемый средствами регистрации, также мал. Поэтому градиентометрический сигнал больше выделяется на фоне сниженного фонового сигнала. Подавление смещения ленты, вызванного абсолютным гравитационным ускорением, подразумевает, что смещение ленты уменьшено в сравнении с эквивалентной лентой, имеющей однородные распределения массы и жесткости, и не подразумевает, что смещение, вызванное абсолютным гравитационным ускорением, обязательно полностью устранено.
Аналогично, благодаря созданию ленты с переменным распределением жесткости и/или массы, так что деформация ленты в ее антисимметричных модах колебаний усилена, влияние гравитационного градиента на смещение ленты значительно и вклад градиентометрической составляющей в сигнал, обнаруживаемый средствами регистрации, также велик.
Таким образом, согласно настоящему изобретению лента может быть выполнена так, что ее отклик смещения вследствие приложенных гравитационных сил увеличивает чувствительность устройства к гравитационному градиенту в сравнении с эквивалентным устройством со струнным или ленточным чувствительным элементом, имеющим однородные распределения жесткости и массы. Таким образом, лента согласно настоящему изобретению выполнена «умным образом», что обеспечивает отклик, различный для различных приложенных сил так, чтобы увеличивать чувствительность устройства к гравитационному градиенту.
Согласно настоящему изобретению лента может характеризоваться неоднородным распределением жесткости и однородным распределением массы. В альтернативном варианте лента может характеризоваться неоднородным распределением массы и однородным распределением жесткости. В альтернативном и предпочтительном варианте лента характеризуется неоднородным распределением жесткости и неоднородным распределением массы. Характер неоднородных распределений жесткости и массы ленты может быть любым нужным для того, чтобы усилить отклик смещения ленты на гравитационный градиент гравитационного поля и/или подавить отклик смещения ленты на абсолютное гравитационное ускорение гравитационного поля. Средства и способы, которыми может быть обеспечено и осуществлено такое подходящее для ленты распределение, будут ясны из нижеследующего описания и примеров осуществления.
Распределение жесткости и/или массы ленты предпочтительно создаются так, что лента сравнительно менее деформируема в своих симметричных модах и сравнительно не менее деформируема в своих антисимметричных модах в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине. Более предпочтительно распределение жесткости и/или массы ленты создается так, чтобы лента была сравнительно менее деформируема в моде 'С' и моде "W и сравнительно не менее деформируема в моде 'S' в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине. В соответствии с этими предпочтительными вариантами осуществления настоящего изобретения градиентометрический сигнал больше выделяется на фоне сниженного уровня шума, происходящего от паразитных мод, так что два эти сигнала легко могут быть разделены.
Чтобы этого достичь, жесткость ленты вокруг средней точки между ее продольными концами предпочтительно сравнительно увеличена в сравнении с другими участками ленты. Благодаря относительному увеличению жесткости ленты в ее средней точке лента является менее деформируемой в 'С' и W модах колебаний, в которых от ленты требуется значительный изгиб в средней точке. Это увеличение жесткости никоим образом не влияет на подавление моды 'S' колебаний, в которой от ленты не требуется значительный изгиб в ее средней точке.
В этом предпочтительном варианте осуществления сравнительное увеличение жесткости ленты вокруг ее средней точки предпочтительно обеспечивается сравнительно утолщенным участком ленты вокруг ее средней точки. Утолщение ленты обеспечивает механизм подавления мод 'С' и 'W, который просто осуществить.
Распределение жесткости и/или массы ленты предпочтительно создается так, что лента сравнительно более деформируема в своих антисимметричных модах в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине. Более предпочтительно распределение жесткости и/или массы ленты создаются так, что лента сравнительно более деформируема в моде 'S' в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине. В соответствии с этими предпочтительными вариантами осуществления настоящего изобретения градиентометрический сигнал обладает большей амплитудой и может быть легче обнаружен на фоне уровня шума, частично происходящего от паразитных мод.
Чтобы этого достичь, жесткость ленты предпочтительно сравнительно снижена вокруг точек L/4 и 3L/4 по длине ленты в сравнении с другими участками ленты. Такое снижение жесткости предпочтительно обеспечивается выполнением ленты сравнительно более тонкой в этих зонах. Так как лента должна в своей моде 'S' колебаний изгибаться в точках L/4 и 3L/4, в данном предпочтительном варианте амплитуда смещения ленты в этой моде увеличена. Чтобы деформироваться в моде 'С' колебаний, ленте нет особой необходимости значительно изгибаться в точках L/4 и 3L/4, так что влияние на эту моду сравнительно пренебрежимо. Поскольку в моде W колебаний ленте также требуется изгибаться в точках L/4 и 3L/4, амплитуда смещения ленты в этой моде также увеличена, если ее подавление не обеспечивается другим свойственным ленте распределением жесткости или массы. Поэтому в альтернативном варианте или в дополнение жесткость ленты предпочтительно больше в средней точке между ее продольными концами в сравнении с точками L/4 и 3L/4 по длине ленты. В этом предпочтительном варианте осуществления мода 'W колебаний ленты эффективно подавлена за счет сравнительно жесткой средней точки ленты, в результате чего лента более склонна к смещению в моде 'S' колебаний, чем в моде W.
В альтернативном варианте или в дополнение масса на единицу длины ленты предпочтительно увеличена вокруг точек L/4 и 3L/4 по длине ленты сравнительно с другими участками ленты. Посредством создания увеличенной массы вокруг точек L/4 и 3L/4 увеличивается сила, действующая на ленту в этих местах, и, таким образом, общее отклонение ленты увеличивается для тех же градиентных ускорений гравитационного поля. Это увеличивает отклик смещения ленты в ее моде 'S', а также ее паразитную моду W. Однако отклик смещения ленты в ее моде 'W предпочтительно подавлен, предпочтительно так, как описано выше. Таким образом, чувствительность устройства к гравитационному градиенту увеличивается.
Признаки этих предпочтительных вариантов, обеспечивающие ленту, которая сравнительно более деформируема в моде 'S', могут быть обеспечены в сочетании с вышеописанными предпочтительными вариантами, обеспечивающими ленту, которая сравнительно менее деформируема в моде 'С' и моде 'W.
Предпочтительно, чтобы жесткость ленты была сравнительно снижена у мест наложения граничных условий у концевых точек ленты. Это предпочтительно достигается посредством выполнения ленты сравнительно тонкой в области ее концевых точек. Создание сниженной жесткости у концевых точек ленты делает ленту более гибкой в этих точках у мест наложения граничных условий. В альтернативном варианте или в дополнение, если на обоих концах ленты имеются средства зажима для удержания ленты под напряжением, средства зажима предпочтительно выполняются так, чтобы лента могла легко отклоняться у средств зажима, и так, чтобы лента не могла переместиться вбок из средства зажима. В соответствии с этими предпочтительными вариантами, в которых лента является более гибкой у мест наложения граничных условий на концах, эффективная длина ленты увеличена и прогибы ленты максимизированы. Когда моды 'С' и W подавлены другими распределениями жесткости или массы, увеличение легкости отклонения ленты вокруг концевых точек служит только максимизации амплитуды моды 'S' колебаний и чувствительности градиентометра.
Толщина плоскости ленты предпочтительно меняется по длине ленты, чтобы обеспечить неоднородное распределение жесткости и/или массы. Предпочтительно переменное распределение толщины плоскости ленты обеспечивается созданием участка ленты, на котором для уменьшения толщины плоскости с ленты удален материал посредством механической обработки или химического травления, и/или созданием участка ленты, на котором для увеличения толщины плоскости к ленте добавлен материал посредством осаждения из паровой фазы. Варьирование толщины ленты является простым способом варьирования распределений жесткости и массы ленты для изменения ее восприимчивости к колебаниям в различных модах.
Свойства материала ленты предпочтительно меняются по длине ленты, чтобы обеспечить неоднородное распределение жесткости и/или массы. К таким свойствам материала может относиться, по меньшей мере, одна характеристика из следующих: плотность, модуль упругости, модуль пластичности, состав сплава, состав материала, характеристики слоистости, тип материала в композите и т.д. Посредством варьирования свойств материала ленты можно более полно управлять восприимчивостью ленты к колебаниям в ее различных модах. Предпочтительно переменное распределение свойств материала ленты обеспечивается отожженным участком ленты и/или закаленным участком ленты. Закалка участка ленты обычно увеличивает жесткость этого участка, тогда как отжиг участка ленты обычно снижает жесткость этого участка. Термообработка ленты с целью закалить и/или отжечь какой-либо участок ленты представляет собой простой способ обработки, обеспечивающий неоднородное распределение жесткости, в котором масса ленты не увеличивается и конструкция ленты остается простой. Более того, для увеличения или уменьшения жесткости ленты ее не требуется делать более толстой или более тонкой.
Поперечное сечение ленты предпочтительно меняется по длине ленты, чтобы обеспечить неоднородное распределение жесткости и/или массы. Посредством создания ленты, имеющей переменное поперечное сечение, желаемые распределения жесткости и/или массы ленты легко могут быть созданы соответствующим моделированием структуры ленты, например с использованием метода конечных элементов, и разнообразными технологиями изготовления.
Предпочтительно переменное поперечное сечение ленты обеспечивается участком ленты, на котором удалены части поперечного сечения для сравнительного снижения жесткости этого участка ленты. Для уменьшения жесткости ленты на этом участке может быть создан участок ленты с прорезями. Участок ленты может иметь несплошное поперечное сечение для получения фигурной структуры, которая обеспечивает низкую величины массы на единицу длины на этом участке без снижения конструкционной прочности и жесткости этого участка. Одним из примеров такой фигурной структуры является сотовая структура, которая по самой своей природе сочетает легкость и прочность. В альтернативном варианте на каком-либо участке ленты может быть создана конфигурация полостей для уменьшения жесткости этого участка.
В альтернативном варианте или в дополнение переменное поперечное сечение ленты обеспечивается участком ленты, имеющим поперечное сечение, включающее структуру, которая выходит из плоскости ленты для сравнительного увеличения жесткости этого участка ленты. Поперечное сечение ленты на участке ленты вокруг ее средней точки предпочтительно имеет вид балки двутаврового сечения. Создание участка в виде двутавровой балки вокруг средней точки ленты обеспечивает увеличение жесткости на этом участке без значительного повышения массы ленты. Далее, в двутавровой конфигурации, в которой также имеется призма у средней точки, два ножа призмы могут быть расположены внутри вырезных частей участка ленты в виде двутавровой балки, так что расстояние между двумя ножами призмы не увеличивается утолщенным участком ленты, и призмы в большей степени ведут себя как точечный ограничитель вращения.
Распределение жесткости и/или массы ленты предпочтительно выбирается посредством оптимизации построенной методом конечных элементов модели ленты. Моделируя схему распределения жесткости и/или массы ленты с использованием метода конечных элементов для проведения модального анализа отклика смещения ленты, можно оптимизировать ее конструкцию для максимизации чувствительности градиентометрического устройства. Далее, распределение толщины ленты, распределение свойств материала ленты и/или распределение поперечного сечения ленты предпочтительно выбираются посредством оптимизации построенной методом конечных элементов модели ленты. Использование этого способа может также обеспечить оптимизацию структуры ленты. Структура ленты может быть оптимизирована, чтобы создать ленту с желаемыми распределениями жесткости и/или массы, или, в альтернативном варианте, может быть непосредственно оптимизирована запроектированная структура самой ленты для максимизации чувствительности градиентометрического устройства.
Для предотвращения поперечного смещения ленты от ее положения покоя в средней точке между концами ленты предпочтительно предусматриваются средства предотвращения смещения. Такие средства предотвращения смещения, например призма, ограничивают деформацию ленты в ее нежелательных симметричных модах.
Согласно другому аспекту настоящего изобретения предлагается способ измерения квазистатических гравитационных градиентов, включающий следующие шаги: удерживают напряженную гибкую ленту за оба конца; обеспечивают средства регистрации для обнаружения поперечного смещения ленты от невозмущенного положения под влиянием гравитационного поля, действующего на указанную ленту, и для генерации сигнала, отражающего такое смещение, и в качестве ответа на указанный сигнал смещения генерируют выходной сигнал, являющийся функцией тензора гравитационного градиента гравитационного поля, причем лента характеризуется неоднородным распределением жесткости и/или массы по своей длине, так что в ходе функционирования усилен отклик смещения ленты на гравитационный градиент гравитационного поля и/или подавлен отклик смещения ленты на абсолютное гравитационное ускорение гравитационного поля.
В способе и устройстве согласно настоящему изобретению чувствительность градиентометрического устройства может быть значительно выше, чем у градиентометра с лентой, у которой отсутствует распределение жесткости и/или массы, созданное так, что отклик смещения ленты на гравитационные градиенты усилен, а ее отклик смещения на абсолютное гравитационное ускорение подавлен. Повышенная чувствительность градиентометра согласно настоящему изобретению делает его более подходящим для практических условий размещения и более полезным для вышеупомянутых практических применений.
Краткое описание чертежей
Ниже, только для примера, будут описаны некоторые предпочтительные варианты осуществления изобретения со ссылками на сопроводительные чертежи.
ФИГ.1 представляет собой схематическое изображение гравитационного градиентометра согласно первому варианту осуществления настоящего изобретения.
ФИГ.2 представляет собой вид сбоку ленты, имеющейся в гравитационном градиентометре ФИГ.1, в ее различных модах колебаний.
ФИГ.3 представляет собой подробное схематическое изображение ленты для гравитационного градиентометра согласно второму варианту осуществления настоящего изобретения.
ФИГ.4 представляет собой подробное схематическое изображение поперечного сечения участка двутавровой формы у средней точки ленты для гравитационного градиентометра согласно третьему варианту осуществления настоящего изобретения.
ФИГ.5 представляет собой подробное схематическое изображение поперечного сечения участка ленты с прорезями для гравитационного градиентометра согласно четвертому варианту осуществления настоящего изобретения.
ФИГ.6 представляет собой подробное схематическое изображение поперечного сечения участка ленты сотовой структуры для гравитационного градиентометра согласно пятому варианту осуществления настоящего изобретения.
ФИГ.7 представляет собой результат модального анализа отклика смещения известной ленты, имеющей однородные распределения массы и жесткости, в 'S' и W модах колебаний, моделирование проведено с использованием метода конечных элементов.
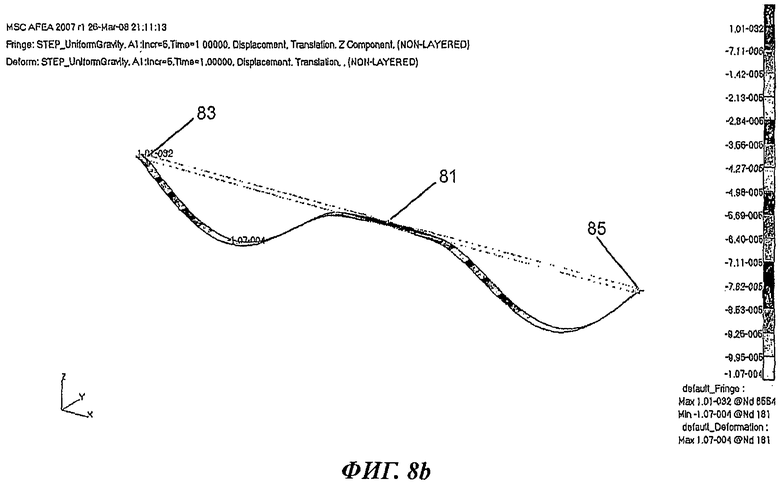
ФИГ.8 представляет собой результат аналогичного анализа отклика смещения в 'S' и W модах колебаний ленты согласно шестому варианту осуществления настоящего изобретения.
ФИГ.9 представляет результат идентичного анализа отклика смещения в 'S' и W модах колебаний ленты согласно седьмому варианту осуществления настоящего изобретения.
ФИГ.10, как уже описано, это схематическое изображение, показывающее основные моды колебаний известной ленты, имеющей однородные распределения массы и жесткости.
Осуществление изобретения
Чувствительный элемент первого варианта осуществления гравитационного градиентометрического устройства 1 согласно настоящему изобретению, показанного на ФИГ. 1, образован длинной лентой 3, ширина и толщина которой много меньше, чем ее длина. Эта лента 3, имеющаяся в устройстве 1, подробно показана на ФИГ. 2а в ее невозмущенном состоянии (т.е. в ее положении покоя).
Лента 3 имеет длину L, составляющую по порядку величины десятки сантиметров и ширину W, которая больше, чем ее толщина D, так что лента 3 подобна бесконечно длинной полосе (т.е. L>>W>D). Такая форма ленты означает, что смещение ленты 3 ограничено направлением, ортогональным к плоскости наибольшей протяженности ленты (к плоскости, определяемой длиной и шириной ленты), и градиентометр, таким образом, чувствителен только к силам, вызывающим смещение ленты 3 в этом направлении (это направление является направлением толщины ленты). Лента 3 выполнена с относительно более толстым средним участком 21 вокруг ее средней точки М в сравнении с относительно тонкими внешними участками 22, 23. Общая длина среднего участка 21 составляет около четверти длины ленты 3. Как будет объяснено ниже, это неоднородное распределение жесткости таково, что отклик смещения ленты 3 на абсолютное гравитационное ускорение подавлен.
Лента 3 удерживается под напряжением между двумя закрепленными точками 5, 7 на ее продольных концах. Между этими двумя закрепленными точками 5, 7 имеются средства 4 предотвращения смещения в виде «призматического» устройства, установленного у средней точки М ленты 3 в ее положении покоя так, чтобы устройство касалось ленты 3, но не оказывало на нее никакого силового воздействия. В остальном движения ленты 3 свободны, так что она может отклоняться от прямой линии S, соединяющей две точки закрепления, под влиянием всякой внешней силы, действующей на ленту 3, например действующей на ленту 3 гравитационной силы, и под влиянием дифференциального гравитационного градиента вдоль ленты 3.
Смещение ленты 3 от ее положения покоя, в общем случае, может быть описано приведенным выше уравнением (3) баланса сил, решения которого имеют вид суммы мод колебаний ленты 3, причем эту сумму составляют компоненты бесконечной суммы разложения Фурье, приведенные выше в уравнении (4).
Однако средства 4 предотвращения смещения у средней точки М ограничивают всякое поперечное смещение ленты 3 от ее положения покоя и добавляют еще одно граничное условие, которое снижает деформацию ленты 3 в ее симметричных модах колебаний (но W-мода колебаний остается, представляя собой линейную сумму всех оставшихся симметричных мод прогибов), не снижая в то же время деформацию ленты 3 в ее антисимметричных модах.
Предусмотрены средства 10 регистрации для обнаружения поперечного смещения ленты 3 от невозмущенного положения S под влиянием гравитационного градиента, действующего на ленту, и для генерации сигнала, отражающего это смещение. Обычно используются средства 10 регистрации традиционного для уровня техники вида, как описано выше. Две воспринимающие катушки 13, 15 расположены симметрично относительно средней точки М ленты 3 и электрически соединены так, чтобы образовывать два плеча резонансной мостовой схемы (не показана), а также подсоединены к системе 17 управления и детектирования. Система 17 управления и детектирования также электрически соединена с лентой 3 для возбуждения ленты 3 генерируемым в системе несущим сигналом переменного тока с частотой выше полосы частот механических колебаний ленты (т.е. с такой частотой, при которой магнитные силы, действующие на ленту, гасятся). Частота резонансной мостовой схемы настраивается на частоту переменного тока несущего сигнала, так что в каждой воспринимающей катушке 13, 15 генерируется соответствующий сигнал, величина которого увеличивается с уменьшением расстояния между лентой 3 и воспринимающими катушками 13, 15. Выходной сигнал смещения от мостовой схемы считывается в системе 17 управления и детектирования посредством синхронного детектирования вместе с несущим сигналом. Воспринимающие катушки 13, 15 и мостовая схема балансируются в противофазе, так что выходной сигнал мостовой схемы чувствителен, прежде всего, к смещению ленты 3 в моде 'S' колебаний. Посредством усиления и обработки сигнала смещения система 17 управления и детектирования генерирует выходной сигнал, являющийся функцией тензора гравитационного градиента гравитационного поля. Все оставшиеся смещения ленты в паразитных модах (в данном случае, в моде W) дают вклад в уровень шума, по превышению над которым должен быть обнаружен сигнал смещения, и ограничивают чувствительность градиентометра.
Однако утолщенный средний участок 21 ленты 3 придает ленте 3 сравнительно высокую жесткость на участке, проходящем через ее среднюю точку М, поэтому к ленте 3 требуется приложить большую силу, для того чтобы изогнуть ленту 3 на этом участке. Напротив, сравнительно тонкие внешние участки 22, 23 имеют относительно низкие жесткости, поэтому для того, чтобы изогнуть ленту 3 на этих участках, требуется меньшая сила.
На ФИГ.2b показана деформация ленты 3 первого варианта осуществления настоящего изобретения в моде W колебаний с призмой 4 для удержания средней точки ленты в положении покоя. Как можно видеть, для того чтобы деформироваться в моде W, средний участок 21 ленты должен сильно изгибаться. Поскольку этот средний участок 21 имеет сравнительно высокую жесткость, сила, требующаяся для того, чтобы изогнуть этот средний участок 21 и деформировать ленту 3 в моде 'W', сравнительно велика. Таким образом, лента 3 первого варианта осуществления настоящего изобретения сравнительно менее деформируема в моде W в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине.
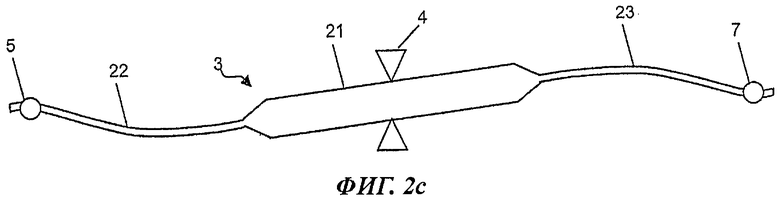
На ФИГ.2с показана деформация ленты 3 первого варианта осуществления настоящего изобретения в моде 'S' колебаний с призмой 4 для удержания средней точки ленты в положении покоя. Как можно видеть, для того чтобы деформироваться в моде 'S', сравнительно тонкие внешние участки 22, 23 ленты 3 должны сильно изгибаться в пучностях, тогда как вокруг узла у средней точки М ленты 3 требуется очень малый изгиб среднего участка 21 ленты 3. Поскольку не требуется изгибать сравнительно жесткий средний участок 21, сила, требующаяся для деформирования ленты 3 в моде 'S', относительно неизменна. Таким образом, лента 3 первого варианта осуществления настоящего изобретения сравнительно не менее деформируема в моде 'S' в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине.
Таким образом, лента 3 сравнительно менее деформируема в моде W, но сравнительно не менее деформируема в моде 'S', поэтому отклик смещения ленты 3 на абсолютное гравитационное ускорение гравитационного поля подавляется. Это снижает уровень шума, по превышению над которым должен быть обнаружен сигнал гравитационного градиента, и обеспечивает создание градиентометрического устройства 1, имеющего высокую чувствительность.
Далее, если градиентометрическое устройство 1 первого варианта осуществления допустить к работе в отсутствие средств 4 предотвращения смещения, то лента 3 сможет деформироваться в ее основной моде 'С', как показано на ФИГ.2d. Как можно видеть, для того чтобы деформироваться в моде 'С', средний участок 21 ленты также должен сильно изгибаться. Таким образом, сравнительно высокая жесткость среднего участка 21 также делает ленту 3 первого варианта осуществления настоящего изобретения сравнительно менее деформируемой в моде 'С' в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине.
В более общем виде: поскольку все симметричные моды колебаний имеют пучность в средней точке М ленты на этом утолщенном участке и поскольку все антисимметричные моды имеют узел в этой средней точке М, сравнительно жесткий средний участок 21 заставляет ленту 3 относительно менее легко деформироваться в ее симметричных модах в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине, в то же время незначительно влияя на способность ленты 3 деформироваться в антисимметричных модах. Поэтому в отсутствие средств 4 предотвращения смещения конструкция ленты 3 первого варианта осуществления настоящего изобретения также подавляет отклик смещения ленты 3 на абсолютное гравитационное ускорение гравитационного поля и снижает уровень шума, по превышению над которым должен быть обнаружен сигнал гравитационного градиента. Таким образом, обеспечивается создание градиентометра 1, имеющего высокую чувствительность.
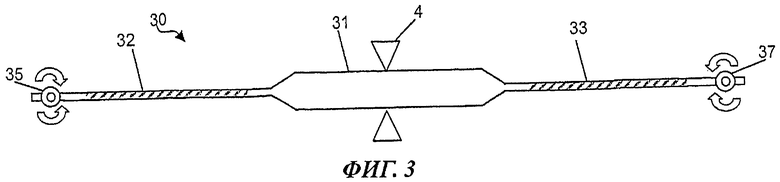
На ФИГ. 3 в деталях показана лента 30, предусмотренная во втором варианте осуществления гравитационного градиентометра согласно настоящему изобретению. В этом втором варианте осуществления в градиентометрическом устройстве 1 первого варианта осуществления вместо ленты 3 предусмотрена лента 30. Распределение жесткости ленты 30 аналогично ленте 3 первого варианта осуществления в том, что лента имеет сравнительно утолщенный средний участок 31, проходящий через среднюю точку М ленты, создавая там сравнительно высокую жесткость. Лента 30 второго варианта осуществления отличается от ленты 3 первого варианта осуществления тем, что имеет сравнительно массивные внешние участки 32, 33, проходящие через точки L/4 и 3L/4. Масса добавляется на эти внешние участки посредством, например, осаждения из паровой фазы в этих зонах с использованием лазерной абляции. Эти сравнительно массивные внешние участки 32, 33 имеют низкие жесткости в сравнении с относительно толстым средним участком 31. Таким образом, лента 30 второго варианта осуществления аналогична ленте 3 первого варианта осуществления за исключением того, что к ленте добавлена масса у пучностей моды 'S'. Благодаря добавлению массы в этих местах сила, действующая здесь на ленту, относительно увеличена, и, таким образом, общий прогиб ленты в этих точках для того же градиента ускорения больше, чем для эквивалентной ленты, имеющей однородное распределение массы.
Таким образом, вследствие неоднородного распределения массы ленты 30 второго варианта осуществления лента 30 сравнительно более деформируема в моде 'S' в сравнении с эквивалентной лентой, имеющей однородное распределение массы. Сравнительно массивные внешние участки 32, 33, создающие неоднородное распределение массы ленты 30, также стимулируют увеличение прогиба в моде W. Однако сравнительно жесткий средний участок 31 ленты в значительной мере ограничивает это увеличения прогиба в моде 'W.
Таким образом, отклик смещения ленты 30 на гравитационные градиенты усилен. Кроме того, подавлен отклик смещения ленты 30 на абсолютное гравитационное ускорение. Это увеличивает величину градиентометрического сигнала относительно уровня шума, что позволяет создать градиентометр, имеющий повышенную чувствительность.
Для дальнейшего увеличения способности ленты деформироваться в моде 'S' жесткость ленты вокруг точек L/4 и 3L/4 относительно снижена сравнительно с другими участками ленты, в частности с участком, проходящим через среднюю точку М. Это достигается посредством отжига ленты на этих участках.
Во втором варианте осуществления зажимы 35, 37, предусмотренные на концах ленты 30 для удержания ленты под напряжением, выполнены так, чтобы позволять ленте 30 легко отклоняться в местах наложения граничных условий на концах, как показано стрелками на ФИГ.3, в то же время не позволяя ленте перемещаться вбок от места наложения граничных условий. Эта легкость отклонения обеспечивается зажимами 35, 37, снабженными поворотными механизмами, позволяющими ленте поворачиваться в зажимах. Создание поворотных зажимов 35, 37 увеличивает эффективную длину ленты и увеличивает прогиб ленты 30 в различных модах колебаний, в частности в ее моде 'S', повышая чувствительность градиентометрического устройства.
В альтернативном варианте эта легкость отклонения ленты в местах наложения граничных условий на концах может быть обеспечена посредством выполнения каждого зажима в виде пары роликов, по одному с каждой стороны ленты. Эффективная длина ленты также может быть увеличена посредством относительного уменьшения жесткости ленты вблизи мест наложения граничных условий на участках ленты, примыкающих к концевым зажимам. Это может быть достигнуто посредством сравнительного уменьшения толщины ленты в этих зонах.
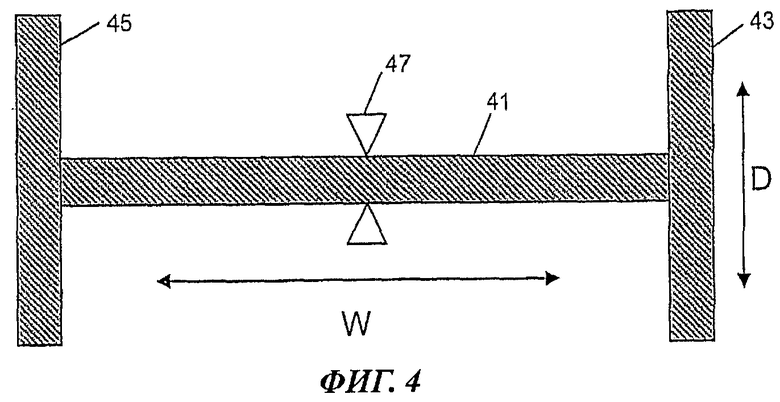
На ФИГ.4 показано поперечное сечение ленты третьего варианта осуществления настоящего изобретения, в котором плоскость 41 ленты образует стенку между двумя полками 43, 45, предусмотренными с обеих сторон плоскости 41 ленты, так что лента выполнена в виде балки двутаврового сечения. Полки 43, 45 могут быть сформированы неразъемной деталью с плоскостью 41 ленты, например, прессованием или прокаткой, или же полки 43, 45 могут быть сформированы отдельно и прикреплены к плоскости 41. Могут быть предусмотрены специальные участки ленты с таким двутавровым поперечным сечением, чтобы обеспечить им повышенную жесткость, но без значительного увеличения массы сравнительно с другими участками ленты, на которых полки 43, 45 отсутствуют. Создание ленты, имеющей участок в виде двутавровой балки вокруг средней точки ленты, как показано на ФИГ.4, обеспечивает увеличение жесткости вокруг средней точки, которое подавляет W-моду без значительного увеличения массы ленты. Далее, два ножа призмы 47, предусмотренные у средней точки ленты, могут быть расположены внутри вырезных частей участка ленты в виде двутавровой балки. В этом варианте осуществления расстояние между двумя ножами призм 47 не увеличивается утолщенным участком ленты и призма в большей степени ведет себя как точечный ограничитель вращения.
На ФИГ. 5 показано поперечное сечение ленты четвертого варианта осуществления настоящего изобретения, в котором в плоскости 51 ленты предусмотрен участок 53 с прорезями в местах или вблизи мест наложения граничных условий на концах ленты для уменьшения жесткости этого участка ленты без значительного снижения массы. Прорезь 53 может быть выполнена с использованием простых способов механической обработки. Снижение таким образом жесткости ленты в местах или вблизи мест наложения граничных условий на концах ленты создает сравнительно большую способность ленты деформироваться в моде 'S'. В альтернативном варианте для уменьшения жесткости участка ленты в ленте может быть предусмотрена некоторая конфигурация полостей.
На ФИГ.6 показано схематическое изображение поперечного сечения участка ленты 61 пятого варианта осуществления настоящего изобретения, сформированного с получением периодической сотовой структуры 63. Сотовая структура может быть спроектирована и изготовлена с использованием соответствующих систем автоматизированного проектирования и производства (CAD/CAM). Сотовая структура 63 обеспечивает на этом участке ленты относительно пониженную массу, но без значительного снижения жесткости сравнительно с другими участками ленты.
Ленты 3 и 30 первого - пятого вариантов осуществления показаны на чертежах лишь схематически для иллюстрации того, как может быть реализовано обеспечивающее преимущества создание неоднородного распределения массы и/или жесткости. Возможны разнообразные исполнения ленты, соответствующие настоящему изобретению тем, что они подавляют сигнал абсолютного гравитационного ускорения и/или усиливают сигнал гравитационного градиента.
На практике схема распределения жесткости и массы ленты может быть строго смоделирована методом конечных элементов (МКЭ) и подвергнута лабораторным испытаниям для проверки модели. Для проектирования ленты может быть использовано любое подходящее программное обеспечение моделирования МКЭ. Примером подходящего программного пакета моделирования МКЭ является пакет MSC Advanced FEA, который можно приобрести у MSC Software в Санта Ана, Калифорния, США (www.mscsofware.com).
При таком процессе проектирования МКЭ окончательный проект ленты может также быть выбран посредством оптимизации ее модельного механического отклика (и в частности, ее отклика смещения в различных модах), чтобы обеспечить максимальную чувствительность градиентометра к гравитационному градиенту гравитационного поля. Другими словами, проект ленты может быть оптимизирован для нахождения баланса этой максимизации усиления отклика смещения под влиянием гравитационного градиента гравитационного поля с максимизацией подавления отклика смещения на абсолютное гравитационное ускорение гравитационного поля. Моделирование МКЭ механического отклика ленты может также использоваться для обеспечения высокой степени линейности и воспроизводимости отклика смещения ленты, что существенно для точности и повторяемости градиентометрических показаний.
Несмотря на применение моделирования МКЭ для создания окончательной оптимальной конструкции ленты общие принципы селективного проектирования отклика смещения ленты в ее различных модах посредством создания неоднородного распределения в соответствии с настоящим изобретением могут быть просто резюмированы следующим образом.
- Величина прогиба ленты в конкретной моде может быть увеличена посредством распределения массы ленты с повышением массы на участках ленты вокруг пучностей этой моды. Масса участка ленты может быть увеличена, например, посредством осаждения из паровой фазы материала, посредством утолщения или уширения ленты или посредством повышения плотности композитной ленты на этом участке. В то время как некоторые из этих методов увеличения массы увеличивают также и жесткость, в отношении увеличения массы в точках L/4 и 3L/4 было обнаружено, что влияние увеличения массы на этих участках обычно перевешивает влияние увеличения жесткости, так что имеет место чистое увеличение прогиба в моде 'S'.
- Противоположный эффект уменьшения прогиба ленты в некоторой конкретной моде может также быть достигнут посредством распределения массы ленты с уменьшением массы на участках ленты вокруг пучностей этой моды. Снижение массы без значительного уменьшения жесткости может быть достигнуто, например, посредством создания несплошного поперечного сечения ленты для получения легкой, но жесткой структуры, например сотовой структуры. Снижение массы может также быть достигнуто посредством создания более тонкой или суженной ленты.
- Величина прогиба ленты в конкретной моде может быть увеличена посредством распределения жесткости ленты с уменьшением жесткости на участках ленты вокруг пучностей этой моды или любых других точек изгиба. Снижение жесткости без значительного уменьшения массы может быть достигнуто, например, посредством отжига ленты, или посредством прорезей, или созданием некоторой конфигурации полостей в ленте. Снижение жесткости может также быть достигнуто посредством создания более тонкой или суженной ленты.
- Противоположный эффект уменьшения прогиба ленты в этой конкретной моде может также быть достигнут посредством распределения жесткости ленты с увеличением жесткости на участках ленты вокруг пучностей этой моды или любых других точек изгиба. Повышение жесткости без значительного увеличения массы может быть достигнуто посредством, например, закалки ленты или посредством создания жесткого поперечного сечения, которое сопротивляется деформации (например, двутаврового сечения). Повышение жесткости может также быть достигнуто посредством увеличения толщины или ширины ленты.
Таким образом, желаемые изменения распределения массы могут быть созданы варьированием формы и размеров ленты (например, ее толщины) или варьированием свойств материала ленты посредством, например, создания конструкции из композитной смеси материалов, имеющих различные плотности, или посредством обработки ленты для изменения свойств ее материала.
Аналогично желаемые изменения распределения жесткости могут, соответственно, быть созданы варьированием формы или размеров ленты (например, ее толщины), варьированием структуры ленты или варьированием свойств материала ленты посредством, например, создания конструкции из композитной смеси материалов, имеющих различные модули упругости, или посредством обработки ленты для изменения свойств ее материала, например ее модуля упругости.
Лента согласно окончательному проекту может быть создана с использованием любого подходящего материала, свойства которого соответствуют проекту, или композитной смеси материалов и с использованием любого известного специалистам подходящего способа производства или послепроизводственной обработки. Однако предпочтительно формировать ленту из одного слоя соответствующего металлического материала, например фосфористой бронзы, так как это упрощает изготовление. Для формирования оптимальной конструкции ленты могут быть использованы соответствующие способы механической обработки, при этом желательно применение методов автоматизированного проектирования и производства. Для создания желаемого поперечного сечения ленты могут быть использованы другие способы металлообработки (например, прокатка или прессование). Материал может быть удален с ленты с использованием других подходящих способов, например рассчитанного по времени химического травления, и материал может быть добавлен к ленте с использованием подходящих методов осаждения, например лазерной абляции, для получения горячего пара металлического материала, который затем осаждается на ленту. Для изменения жесткости ленты могут быть использованы способы термообработки, например отжиг или закалка. Они могут применяться локально в нужных местах ленты.
На ФИГ.7-9 показаны результаты модального анализа отклика смещения трех лент, имеющих различные распределения жесткости и массы; моделирование проведено с использованием метода конечных элементов.
Все моделируемые ленты имеют размеры 300 мм ×5 мм × 0,3 мм и закреплены на концах, так что они не могут смещаться от этих фиксированных точек или поворачиваться вокруг них. Моделируемые ленты также фиксированы в положениях покоя в их средних точках, так что они не могут смещаться от этого положения.
На ФИГ.7 представлена модель ленты известного типа, показанного на ФИГ.10; лента сформирована из полосы 70 однородного материала, имеющей однородное поперечное сечение, так что лента не отличается неоднородным распределением жесткости или массы.
На ФИГ.8 представлена модель ленты 80 для градиентометра согласно шестому варианту осуществления настоящего изобретения, который аналогичен комбинации первого и четвертого вариантов осуществления. Лента шестого варианта осуществления включает участок 81, имеющий увеличенную жесткость, созданную утолщенным участком вокруг средней точки ленты, и участки 83, 85, имеющие уменьшенную жесткость в концевых точках ленты у мест наложения граничных условий благодаря меньшей толщине и наличию прорезей; на всех прочих участках толщина ленты нормальная.
На ФИГ.9 представлена модель ленты 90 для градиентометра согласно седьмому варианту осуществления настоящего изобретения, который аналогичен шестому варианту осуществления за исключением того, что здесь имеются дополнительные утолщенные участки 92, 94 увеличенной жесткости вокруг точек L/4 и 3L/4 и участки 96, 97 пониженной толщины с прорезями, имеющие уменьшенную жесткость, с обеих сторон жесткого среднего участка 91, так что все утолщенные жесткие участки 91, 92, 94 разделены участками уменьшенной жесткости, имеющими пониженную толщину и прорези. Далее предусмотрены также участки 98, 99 с прорезями уменьшенной жесткости в местах, расположенных вблизи, но на расстоянии от концевых точек ленты. Данная конструкция ленты создана посредством МКЭ модели, оптимизирующей распределение жесткости и массы для увеличения чувствительности градиентометра, и лента поэтому более «экзотична» или имеет более «умную» конструкцию. В самом деле, создание утолщенных жестких участков 92, 94 вокруг точек L/4 и 3L/4 ленты 90 дает эффект снижения способности ленты 90 деформироваться в ее моде 'S'. Однако, как мы увидим, это может привести к увеличению общей величины прогиба ленты 90 в ее антисимметричных модах и увеличению выигрыша в чувствительности градиентометра.
Моделируемые ленты подвергаются воздействию абсолютного гравитационного ускорения g=9,8 м с-2 (на поверхности земли), так что они деформируются в их антисимметричной моде W (см. ФИГ.7b, 8b и 9b) и должны быть подвергнуты воздействию гравитационного градиента Т=1 с-2=1×10 Э, так что они деформируются в их симметричных модах с доминирующей компонентой моды 'S' (см. ФИГ.7а, 8а и 9а). Обе моделируемые гравитационные силы действуют в направлении чувствительности ленты.
Величины максимальных смещений всех лент в их антисимметричных и симметричных модах сравниваются ниже в Таблице.
Можно видеть, что сравнительно с «однородной» известной лентой, показанной на ФИГ.7, лента 80 шестого варианта осуществления настоящего изобретения, показанная на ФИГ.8, дает усиление максимального смещения из-за абсолютного гравитационного ускорения, равное 0,85 (т.е. ослабление), и усиление максимального смещения под влиянием гравитационного градиента, равное 2,2. Таким образом, участок 81 увеличенной жесткости у средней точки ленты 80 подавил ее чувствительность к моде 'W' сравнительно с однородной лентой 70, а участки 83, 85, имеющие уменьшенную жесткость в концевых точках ленты благодаря меньшей толщине и наличию прорезей, увеличили ее чувствительность к моде 'S' сравнительно с однородной лентой 70. Это дает общее усиление чувствительности, равное 2,6 для градиентометра шестого варианта осуществления настоящего изобретения, сравнительно с известным «однородным» градиентометром.
Далее, сравнительно с «однородной» известной лентой, показанной на ФИГ.7, лента 90 седьмого варианта осуществления настоящего изобретения, показанная на ФИГ.9, дает усиление максимального смещения из-за абсолютного гравитационного ускорения, равное 2,0, и усиление максимального смещения под влиянием гравитационного градиента, равное 8,2. Это дает общее усиление чувствительности, равное 4,1 для градиентометра седьмого варианта осуществления настоящего изобретения, сравнительно с известным градиентометром. Очевидно, что даже хотя лента 90 этого седьмого варианта осуществления настоящего изобретения имеет повышенную чувствительность к моде W сравнительно с известной лентой, более высокое общее усиление градиентометрического сигнала может все-таки быть достигнуто посредством оптимизации «умной» конструкции ленты. Как можно видеть из ФИГ. 9, деформация «умной» ленты 90 этого седьмого варианта осуществления настоящего изобретения очень необычна тем, что максимальный прогиб имеет место на расстоянии от точек L/4 и 3L/4. Однако необычные антисимметричные прогибы ленты под влиянием гравитационного градиента предпочтительны, при условии что обнаруженный сигнал гравитационного градиента увеличен в сравнении с обнаруженными симметричными прогибами ленты из-за абсолютного гравитационного ускорения. Детекторные катушки 13, 15 не обязательно должны быть расположены в местах максимального антисимметричного прогиба ленты под влиянием гравитационного градиента, хотя это может быть предпочтительно.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИОННЫХ ПОЛЕЙ | 1995 |
|
RU2145429C1 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| ОБРАБОТКА ДАННЫХ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2008 |
|
RU2486549C2 |
| ИЗМЕРИТЕЛЬНЫЙ БЛОК ДЛЯ ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 2017 |
|
RU2668954C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| ГРАДИЕНТОМЕТР СИЛЫ ТЯЖЕСТИ | 1991 |
|
RU2043644C1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ НА АКВАТОРИИ МОРЯ ПРИ ПОИСКЕ ПОДВОДНЫХ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2011 |
|
RU2483330C1 |
| ОБРАБОТКА ДАННЫХ ГРАВИМЕТРИЧЕСКОЙ РАЗВЕДКИ | 2006 |
|
RU2431873C2 |














Настоящее изобретение относится к устройству для прямого измерения компонент тензора гравитационного градиента, в частности недиагональных компонент тензора, и к способу измерения упомянутых компонент тензора, и относится к областям навигации и разведки (например, обнаружения пустот), к геологоразведочным работам, к подводной навигации и разведке, к наземной и морской археологии, к медицине и исследованию космоса (например, для получения карт плотности астероидов и других орбитальных тел Солнечной системы). Заявленная группа изобретений включает устройство для измерения квазистатических гравитационных градиентов, включающее напряженную гибкую ленту, удерживаемую за оба конца; средства регистрации, предназначенные для обнаружения поперечного смещения ленты от невозмущенного положения под влиянием гравитационного поля, действующего на указанную ленту, и для генерации сигнала, отражающего такое смещение, и средства вывода, связанные с указанными средствами регистрации и в качестве ответа на указанный сигнал смещения генерирующие выходной сигнал, являющийся функцией тензора гравитационного градиента гравитационного поля, при этом лента характеризуется неоднородным распределением жесткости и/или массы по своей длине, так что в ходе функционирования усилен отклик смещения ленты на гравитационный градиент гравитационного поля и/или подавлен отклик смещения ленты на абсолютное гравитационное ускорение гравитационного поля, а также способ измерения квазистатических гравитационных градиентов. Технический результат, достигаемый от реализации заявленной группы изобретений, заключается в обеспечении устройств, позволяющих проводить точные и абсолютные измерения различных компонент тензора гравитационного градиента Tij, обеспечивая максимальную чувствительность градиентометра к гравитационному градиенту гравитационного поля. 2 н. и 23 з.п. ф-лы, 10 ил.
1. Устройство для измерения квазистатических гравитационных градиентов, включающее
напряженную гибкую ленту, удерживаемую за оба конца;
средства регистрации, предназначенные для обнаружения поперечного смещения ленты от невозмущенного положения под влиянием гравитационного поля, действующего на указанную ленту, и для генерации сигнала, отражающего такое смещение; и
средства вывода, связанные с указанными средствами регистрации и, в качестве ответа на указанный сигнал смещения, генерирующие выходной сигнал, являющийся функцией тензора гравитационного градиента гравитационного поля,
причем лента характеризуется неоднородным распределением жесткости и/или массы по своей длине, таким, что в ходе функционирования усилен отклик смещения ленты на гравитационный градиент гравитационного поля и/или подавлен отклик смещения ленты на абсолютное гравитационное ускорение гравитационного поля.
2. Устройство по п.1, отличающееся тем, что распределение жесткости и/или массы ленты произведено так, что лента сравнительно менее деформируема в своих симметричных модах и сравнительно не менее деформируема в своих антисимметричных модах в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине.
3. Устройство по п.2, отличающееся тем, что распределение жесткости и/или массы ленты произведено так, что лента сравнительно менее деформируема в моде 'С' и моде 'W' и сравнительно не менее деформируема в моде 'S' в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине.
4. Устройство по п.2 или 3, отличающееся тем, что жесткость ленты на участке вокруг средней точки между продольными концами ленты сравнительно увеличена в сравнении с другими участками ленты.
5. Устройство по п.4, отличающееся тем, что сравнительное увеличение жесткости ленты вокруг ее средней точки обеспечено сравнительно утолщенным участком ленты вокруг ее средней точки.
6. Устройство по п.1, отличающееся тем, что распределение жесткости и/или массы ленты произведено так, что лента сравнительно более деформируема в своих антисимметричных модах в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине.
7. Устройство по п.6, отличающееся тем, что распределение жесткости и/или массы ленты произведено так, что лента сравнительно более деформируема в моде 'S' в сравнении с эквивалентной лентой, имеющей однородное распределение жесткости и/или массы по своей длине.
8. Устройство по п.6 или 7, отличающееся тем, что жесткость ленты сравнительно снижена вокруг точек L/4 и 3L/4 по длине ленты в сравнении с другими участками ленты.
9. Устройство по п.6 или 7, отличающееся тем, что жесткость ленты вокруг средней точки между продольными концами ленты больше, чем вокруг точек L/4 и 3L/4 по длине ленты.
10. Устройство по п.6 или 7, отличающееся тем, что масса на единицу длины ленты увеличена вокруг точек L/4 и 3L/4 по длине ленты.
11. Устройство по п.1, отличающееся тем, что жесткость ленты сравнительно снижена вблизи мест наложения граничных условий на концах ленты.
12. Устройство по п.11, отличающееся тем, что жесткость ленты снижена посредством создания снабженных прорезями участков ленты вблизи мест наложения граничных условий на концах ленты.
13. Устройство по п.1, отличающееся тем, что на обоих концах ленты предусмотрены средства зажима для удержания ленты под напряжением, причем средства зажима выполнены так, что лента может легко отклоняться у средств зажима, и так, что лента не может переместиться вбок из средства зажима.
14. Устройство по п.1, отличающееся тем, что толщина плоскости ленты меняется по длине ленты, чтобы обеспечить неоднородное распределение жесткости и/или массы.
15. Устройство по п.14, отличающееся тем, что переменное распределение толщины плоскости ленты обеспечивается участком ленты, на котором для уменьшения толщины плоскости с ленты удален материал посредством механической обработки или посредством химического травления, и/или обеспечивается участком ленты, на котором для увеличения толщины плоскости к ленте добавлен материал посредством осаждения из паровой фазы.
16. Устройство по п.1, отличающееся тем, что свойства материала ленты меняются по длине ленты, чтобы обеспечить неоднородное распределение жесткости и/или массы.
17. Устройство по п.16, отличающееся тем, что переменное распределение свойств материала ленты обеспечено отожженным участком ленты и/или закаленным участком ленты.
18. Устройство по п.1, отличающееся тем, что поперечное сечение ленты меняется по длине ленты, чтобы обеспечить неоднородное распределение жесткости и/или массы.
19. Устройство по п.18, отличающееся тем, что переменное поперечное сечение ленты обеспечено участком ленты, на котором части поперечного сечения удалены для сравнительного снижения жесткости этого участка ленты.
20. Устройство по п.18 или 19, отличающееся тем, что переменное поперечное сечение ленты обеспечено участком ленты, имеющим поперечное сечение, включающее структуру, которая выходит из плоскости ленты, для сравнительного увеличения жесткости этого участка ленты.
21. Устройство по п.20, отличающееся тем, что поперечное сечение ленты на участке ленты вокруг ее средней точки выполнено в виде балки двутаврового сечения.
22. Устройство по п.1, отличающееся тем, что распределение жесткости и/или массы ленты выбрано посредством оптимизации модели ленты, построенной методом конечных элементов.
23. Устройство по п.1, отличающееся тем, что распределение толщины ленты, распределение свойств материала ленты и/или распределение поперечного сечения ленты выбрано посредством оптимизации модели ленты, построенной методом конечных элементов.
24. Устройство по п.1, отличающееся тем, что дополнительно включает средства предотвращения смещения, предназначенные для предотвращения поперечного смещения ленты от ее положения покоя у средней точки между концами ленты.
25. Способ измерения квазистатических гравитационных градиентов, включающий следующие шаги:
удерживают напряженную гибкую ленту за оба конца;
обеспечивают средства регистрации для обнаружения поперечного смещения ленты от невозмущенного положения под влиянием гравитационного поля, действующего на указанную ленту, и для генерации сигнала, отражающего такое смещение; и
в качестве ответа на указанный сигнал смещения генерируют выходной сигнал, являющийся функцией тензора гравитационного градиента гравитационного поля,
причем лента характеризуется неоднородным распределением жесткости и/или массы по своей длине, так что в ходе функционирования усилен отклик смещения ленты на гравитационный градиент гравитационного поля и/или подавлен отклик смещения ленты на абсолютное гравитационное ускорение гравитационного поля.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИОННЫХ ПОЛЕЙ | 1995 |
|
RU2145429C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ОТВОДА В СТОРОНУ ОТ ИЗДЕЛИЯ СТРУЖЕК ПРИ РАБОТЕ КОРОБЧАТЫМ КВАДРАТНЫМ ДОЛОТОМ СО СВЕРЛОМ ВНУТРИ ЕГО | 1928 |
|
SU12913A1 |
| Штамп для вытяжки листового металла | 1927 |
|
SU6191A1 |
| СПОСОБ ПРОИЗВОДСТВА ЖЕЛЕЙНОГО МАРМЕЛАДА | 2002 |
|
RU2233598C2 |

