Изобретение относится к технике связи, системам атоматизации и информатики, в частности, к контроллеру, выполняющему функции управления и мониторинга объектами инженерной инфраструктуры (электротехническими объектами), управления системами автоматизации и предиктивного ремонта технических объектов для выполнения функций предиктивного ремонта и реализации концепции интернета вещей. При этом, контроллер предназначается для сбора данных с подключенных к нему разнотипных датчиков и сенсоров, передачи информации локальному серверу по локальной сети, получения команд на управление и непосредственное управление драйверами и реле. Он позволяет также выполнять сбор информации во всем ее многообразии с датчиков тока, температуры, влажности, энергопотребления, газа, пожарных датчиков и систем охраны, а также осуществлять мониторинг, удаленное автоматизированное или самостоятельное управление инженерными модулями.
Известно устройство управления и мониторинга ячейки комплектного распределительного устройства цифровой подстанции, содержащее первый контроллер, снабженный аналоговыми и дискретными входами, предназначенными для подключения к соответствующим выходам датчиков состояния ячейки комплектного распределительного устройства, второй контроллер, снабженный последовательным портом, к которому подключен сенсорный экран, и третий контроллер, снабженный дискретными входами для подключения к датчикам состояния ячейки комплектного распределительного устройства, и дискретными выходами, к которым подключен формирователь релейных сигналов управления ячейкой комплектного распределительного устройства, при этом первый, второй и третий контроллеры связаны между собой внутренней локальной вычислительной сетью, а второй и третий контроллеры снабжены первым и вторым дублированными портами Ethernet, предназначенными для подключения к станционной шине и к шине процесса цифровой подстанции соответственно [1].
Это известное устройство управления и мониторинга ячейки комплектного распределительного устройства цифровой подстанции является узкопрофильным техническим решением, относящимся исключительно к электроэнергетическим объектам, а именно к распределительным устройствам цифровой подстанции. Оно не позволит достичь положительного технического результата, заключающегося в обеспечении выполнения устройством функций мониторинга и управления при большом количестве подключенных нагрузок из различных областей техники при одновременном обеспечении высокой скорости управления подключенными к устройству нагрузками.
Известно также интеллектуальное электронное устройство, содержащее модуль ввода/вывода, содержащий множество аналоговых и цифровых входных соединений и выходных соединений, сконфигурированных для соединения интеллектуального электронного устройства к множеству первичных объектов энергосистемы, причем модуль ввода/вывода действует для приема входных сигналов от множества первичных объектов энергосистемы и выдачи выходных сигналов на множество первичных объектов энергосистемы и модуль регистрации нарушений, действующий для регистрации множества нарушений из множества каналов, отличающийся модулем обработки, оперативно соединенным с модулем ввода/вывода и с модулем регистрации нарушений, причем модуль обработки содержит процессор, действующий для анализа входных сигналов от множества первичных объектов энергосистемы для выполнения, по меньшей мере, одного из интегрированных защиты, управления или контроля множества первичных объектов энергосистемы, причем первичным объектом энергосистемы является объект из группы, включающий в себя автоматический выключатель, реле, разъединитель, рубильник, переключатель ответвлений, силовой трансформатор и силовую линию энергоснабжения [2].
Данное техническое решение обеспечивает защиту, управление и/или контроль только элементов, составляющих систему передачи и распределения энергии, и не позволит эффективно выполнять сбор и передачу информации и данных подключенных к нему разнотипных датчиков и сенсоров, а также осуществлять мониторинг, удаленное автоматизированное или самостоятельное управление инженерными модулями из различных областей науки и техники.
Заявитель ставил перед собой задачу практической разработки контроллера управления и мониторинга достаточно простого по принципиальной структурной схеме автоматизации и предиктивного ремонта технических объектов, обеспечивающего эффективные сбор информации и данных с подключенных к нему разнотипных датчиков и сенсоров, передачу информации локальному серверу по локальной сети, получение команд на управление и непосредственное управление драйверами и реле. Данный положительный технический результат был достигнут за счет новой совокупности существенных конструктивных признаков заявляемого контроллера управления и мониторинга, выполненного согласно настоящему изобретению, и представленного в нижеследующей формуле изобретения: «контроллер управления и мониторинга объектами инженерной инфраструктуры, содержащий блок связи, по меньшей мере, один блок сбора данных и управления, преобразователи, осуществляющие взаимодействие между вышеуказанными блоками по интерфейсу через запросы блока связи и ограниченные по объему и времени ответы блоков сбора данных и управления, аналоговые датчики и сенсорные элементы управления, блок перезагрузки микроконтроллеров, сетевой Ethernet-модуль, блок преобразования UART-USB и внешние порты, при этом блок связи подключен к роутеру локальной сети по двум каналам: по каналу WIFI, используемому, если проводного соединения нет или оно нарушено, и по проводному Ethernet-соединению посредством, по меньшей мере, одного микроконтроллера ESP8266, имеющего встроенный беспроводный интерфейс WIFI через сетевой Ethernet-модуль, коммутируемый по SPI, вышеупомянутый блок сбора данных и управления основан на микроконтроллере STM32F103C8T6, элементах, усиливающих мощность выходов микроконтроллера и элементах, обеспечивающих возможность расширить аналоговые порты, и суммарно имеет, по меньшей мере, управляющих 25 входов/выходов типа «открытый коллектор» для управления реле, типа «открытый сток», рассчитанных на максимальный ток, каналов АЦП с переключателями, универсальных GPIO для подключения устройств с интерфейсами, при этом аналоговые датчики и сенсорные элементы управления подключены к плате контроллера STM32F103C8T6, установленной в стандартный корпус под DIN-соединение рейку, через двухрядные клеммники, порты ввода/вывода для подключения датчиков нагрузки, джамперы управления смещением портов аналогового ввода и джамперы управления режимом работы контроллера, причем блок перезагрузки микроконтроллеров, предназначенный для повышения надежности работы контроллера, реализован посредством транзисторной схемы, где сигнал RESET STM по нарастающему фронту открывает транзистор, перезагружающий микроконтроллер STM32F103C8T6, сигналом RESETSTMRSE управляется порт GPI04 микроконтроллера ESP8266, сигнал RESETESP по нарастающему на фронту открывает транзистор, перезагружающий микроконтроллер ESP8266, и одновременно транзистор, блокирующий ложный сигнал RESET STM, возникающий вследствие перезагрузки микроконтроллера ESP8266, сигналом RESET ESP управляется порт РВ9 микроконтроллера STM32F103C8T6, позволяя блоку связи и блоку сбора данных и управления осуществлять взаимную перезагрузку в случае, если один из блоков зацикливается и перестает связываться с другим; преобразователи выполнены типа UART-RS-485 на основе микросхем ST4ST485; взаимодействие между блоком связи и блоком сбора данных и управления осуществляется по интерфейсу RS-485; по меньшей мере, 3 входа/выхода типа «открытый коллектор» для управления реле, по меньшей мере, 7 входов/выходов типа «открытый сток», рассчитанных на максимальный ток, 8 каналов АЦП с переключателями, 7 универсальных GPIO для подключения устройств с интерфейсами 12С, SPI, UART, 1-wire; 3 выхода типа «открытый сток» рассчитаны на значение максимального тока, равное 10 А, для управления светодиодными лентами напрямую; микроконтроллер ESP8266 выполнен, по меньшей мере, с одним двунаправленным преоразователем UART, предназначенным для его прошивки и отладки, с помощью блока преобразования UART-USB для подключения платы к компьютеру; для задействования блока преобразования UART-USB для связи с блоком сбора данных и управления в микроконтроллере ESP8266 выполнены съемные перемычки, переключаемые в случае необходимости смены режима отладки на режим нормальной работы; диапазон выходных напряжений аналоговых датчиков для подключения к портам ввода/вывода составляет от 0 до 3,3 В; через интерфейс соединение RS- 485 подключается до 30 внешних блоков сбора данных и управления на расстоянии до 500 м».
Эффективность заявляемого контроллера управления и мониторинга объектами инженерной инфраструктуры (электротехническими объектами) обеспечивается тем, что он содержит два взаимодействующих по проводному каналу связи независимых вычислительных блоков (блок связи и блок сбора данных и управления), один из которых выполняет функции управления подключенными к контроллеру нагрузками, а также получения данных с подключенных к нему измерительных устройств, а другой выполняет функции взаимодействия с внешними агентами пользователя, аппаратурой, обеспечивающей работу этих агентов, и позволяющей формировать команды управления нагрузками. Контроллер включает в свой состав различные схемы преобразования сигналов, такие, как схемы усиления и схемы преобразования интерфейсов, позволяющие подключать нагрузки разных типов, включая устройства со сложными алгоритмами.
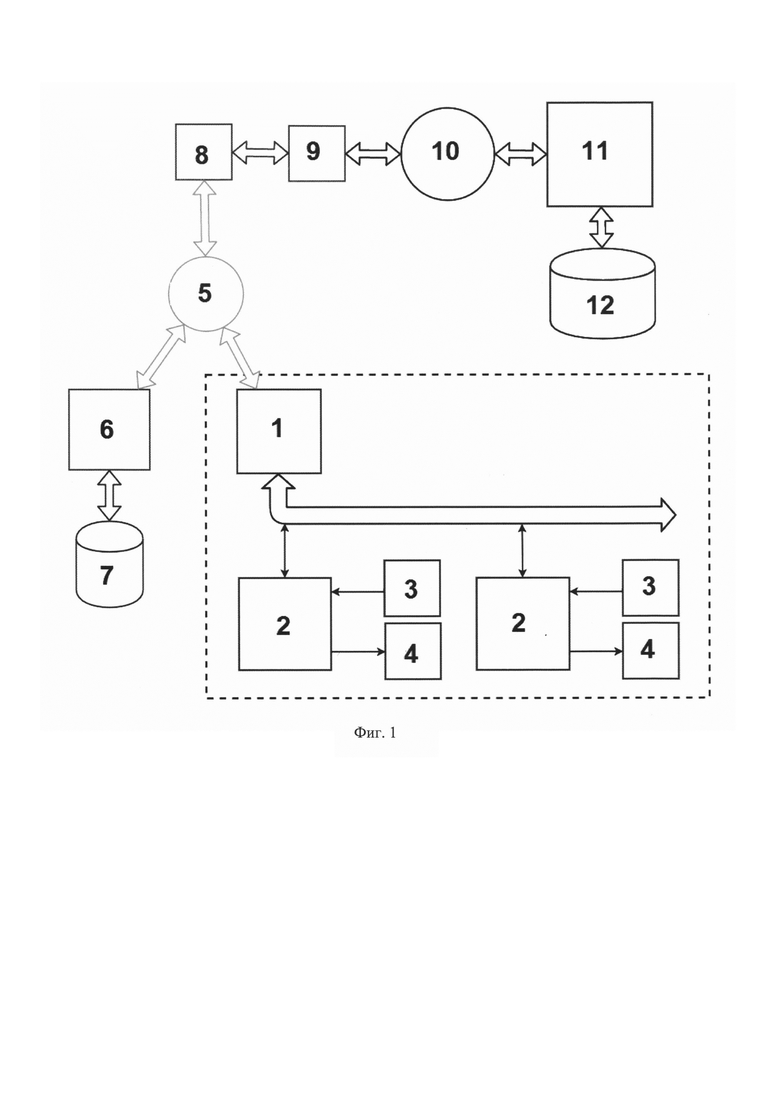
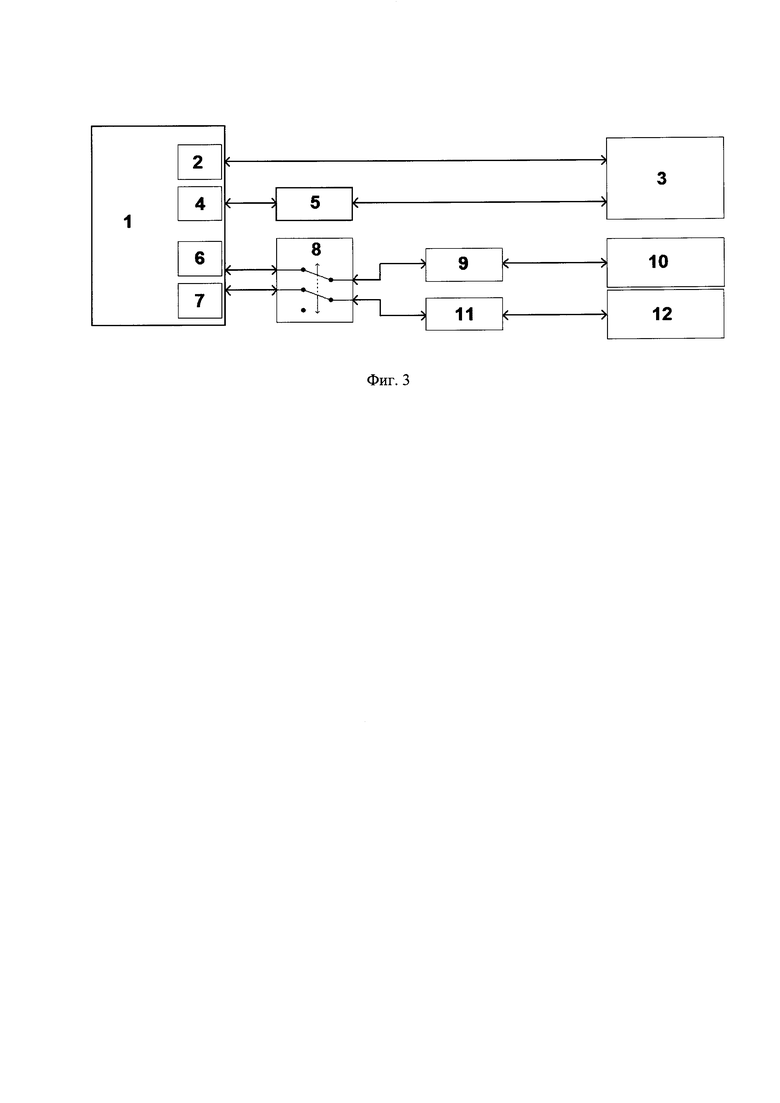
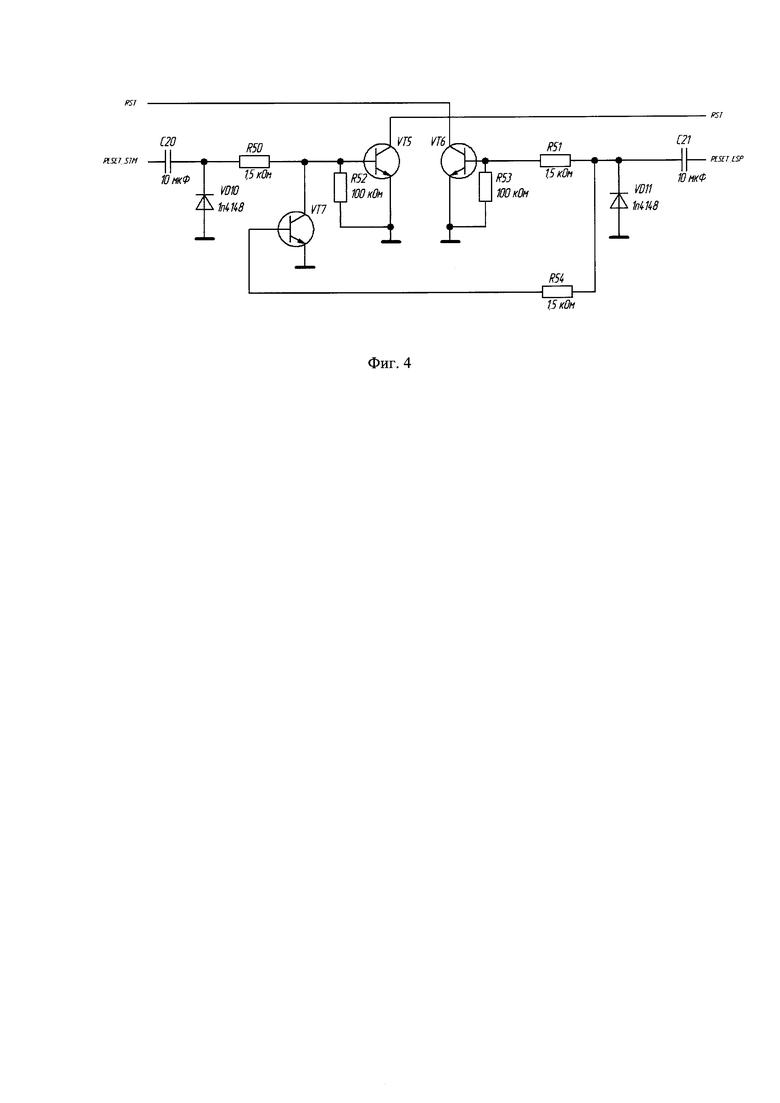
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема системы автоматизации и предиктивного ремонта технических объектов; на фиг. 2 -структурная схема контроллера управления и мониторинга, выполненного согласно настоящему изобретению, системы автоматизации и предиктивного ремонта технических объектов; на фиг. 3 - структурная схема блока связи контроллера на фиг. 2; на фиг. 4 - принципиальная структурная схема блока перезагрузки контроллера на фиг. 2; на фиг. 5 - внешние порты и коммутационные элементы контроллера на фиг. 2; на фиг. 6 - электрическая принципиальная схема блока связи контроллера на фиг. 2; на фиг. 7 - схема подключения джамперов в режиме нормальной работы контроллера на фиг. 2; на фиг. 8 - схема подключения джамперов в режиме отладки контроллера на фиг. 2; на фиг. 9 - схема подключения джамперов в режиме перепрограммирования контроллера на фиг. 2.
Заявляемый контроллер управления и мониторинга объектами инженерной инфраструктуры содержит блок связи 1, один или несолько блоков сбора данных и управления 2, преобразователи 3 типа UART-RS-485 на основе микросхем ST485, осуществляющие взаимодействие между блоками 1, 2 по интерфейсу 4 RS-485 через запросы блока связи 1 и ограниченные по объему и времени ответы блоков сбора данных и управления 2, датчики и сенсорные элементы управления 5, блок перезагрузки 6, сетевой Ethernet-модуль 7, блок преобразования UART-USB 8, внешние порты и коммуникационные элементы 9.
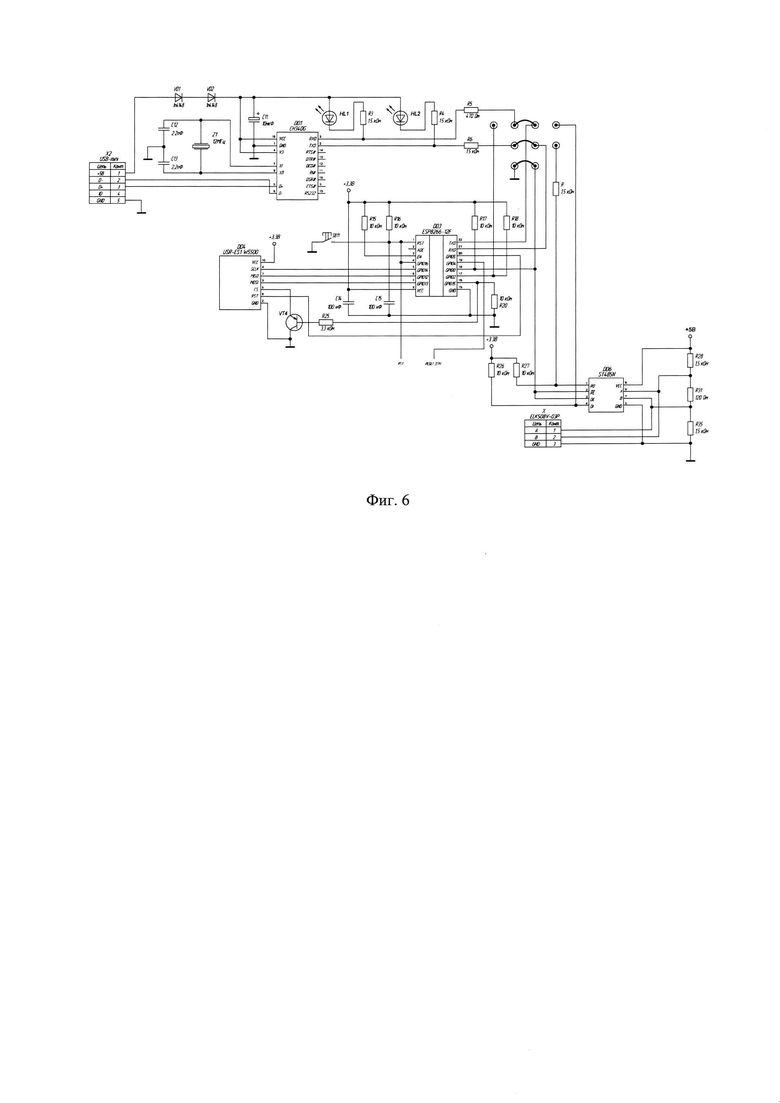
Блок связи 1 подключается к роутеру 10 локальной сети 11 по двум каналам: по каналу WIFI, используемому, если проводного соединения нет или оно нарушено, и по проводному Ethernet-соединению посредством микроконтроллера ESP8266 12, имеющего встроенный беспроводный интерфейс WIFI через сетевой Ethernet-модуль 13, коммутируемый по SPI (фиг. 6).
Блок сбора данных и управления 2 построен на основе микроконтроллера STM32F103C8T6, элементах, усиливающих мощность выходов микроконтроллера и элементах, обеспечивающих возможность расширить аналоговые порты, и он суммарно имеет управляющих 25 входов/выходов: 3 входа/выхода типа «открытый коллектор» для управления реле, 7 входов/выходов типа «открытый сток», рассчитанных на максимальный ток (3 выхода типа «открытый сток» рассчитываются на значение максимального тока, равное 10 А, для управления светодиодными лентами напрямую), 8 каналов АЦП с переключателями, 7 универсальных GPIO для подключения устройств с интерфейсами 12С, SPI, UART, 1-wire.
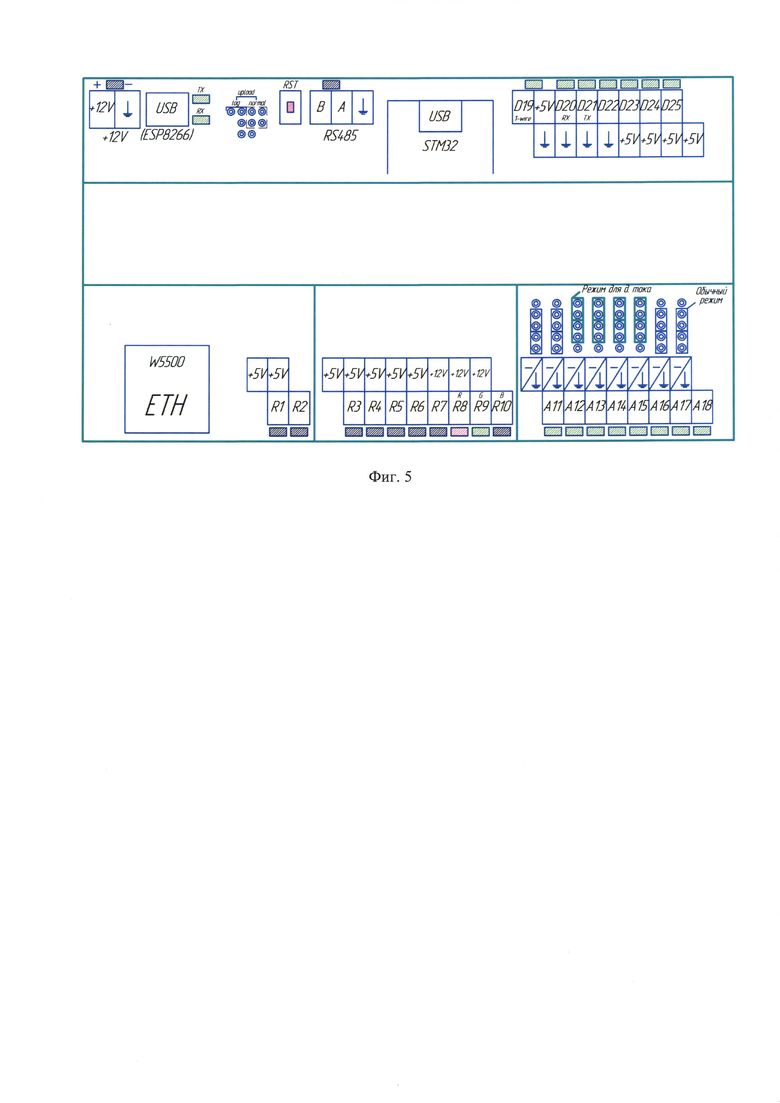
Аналоговые датчики и сенсорные элементы управления 5 подключаются к плате контроллера STM32F103C8T6, устанавливаемой в стандартный корпус под DIN-соединение рейку, через двухрядные клеммники, порты ввода/вывода для подключения датчиков нагрузки, джамперы управления смещением портов аналогового ввода и джамперы управления режимом работы контроллера (фиг. 5).
Блок перезагрузки 6 микроконтроллеров предназначается для повышения надежности работы контроллера и реализуется посредством принципиальной структурной схемы (фиг. 4), построенной на транзисторах. Сигнал RESET STM по нарастающему фронту открывает транзистор VT5, который перезагружает микроконтроллер STM32F103C8T6 блока сбора данных и управления 2, сигналом RESET STM управляется порт GPI04 микроконтроллера ESP8266 12, а сигнал RESET ESP по нарастающему фронту открывает транзистор VT6, который перезагружает микроконтроллер ESP8266 12, и одновременно транзистор VT7, блокирующий ложный сигнал RESET STM, возникающий вследствие перезагрузки микроконтроллера ESP8266 12, сигналом RESET ESP управляется порт РВ9 микроконтроллера STM32F103C8T6, что позволяет блоку связи 1 и блоку сбора данных и управления 2 осуществлять взаимную перезагрузку в случае, если один из блоков зацикливается и перестает связываться с другим.
Микроконтроллер ESP8266 12 выполняется с одним двунаправленным преобразователем UART, предназначенным для его прошивки и отладки, с помощью блока преобразования UART-USB 8 для подключения платы к компьютеру.
В контроллере управления и мониторинга для задействования преобразователя UART для связи с блоком сбора данных и управления 2 в микроконтроллере ESP8266 12 выполняются съемные перемычки, переключаемые в случае необходимости смены режима отладки на режим нормальной работы.
Диапазон выходных напряжений датчиков портов аналогового ввода составляет от 0 до 3,3 В, интерфейс соединение RS- 485 подключается до 30 внешних блоков сбора данных и управления на расстоянии до 500 м.
Изобретение работает следующим образом:
Блок связи 1, основной функцией которого является связь с локальным сервером и отправка команд/запросов блоку (или нескольким блокам сбора данных и информации) 2, основан на модуле ESP8266 12 производителя Espressif. Выбор обуславливается наличием встроенного интерфейса WIFI, а также высокими скоростными характеристиками и большим объемом памяти. Кроме того, для данного модуля доступно большое количество открытых библиотек. Е8Р8266-соединение 12. Он состоит из платы, предназначенной для поверхностного монтажа на другую плату, микрополосковой антенны WIFI-соединения, 32-соединения битного микроконтроллера ESP8266 12 с обвязкой, и микросхемы flash-соединение, памяти, подключаемой к контроллеру по SPI.
Тактовая частота микроконтроллера Е8Р8266-соединение 12 составляет 80 МГц, объем flash-соединение памяти составляет 4 Мегабайта. Периферийные шины: UART/HSPI/I2C/I2S/инфракрасный интерфейс удаленного управления.
Основой блока сбора данных и управления 2 является 32-соединение битный микроконтроллер STM32F103C8T6. Его выбор обусловлен относительно большим количеством портов ввода/вывода и достаточной для выполняемых задач тактовой частотой. Основные характеристики микроконтроллера: частота: до 72 МГц, RAM: 20 Кбайт, Flash: 64 Кбайт, кварц: 8 МГц, корпус: LQFP48, GPIO: 37, Таймеров: 3, SPI: 2,12C: 2,4.
Для управления высоковольтной нагрузкой в щитке используются импульсные реле, которые в свою очередь переключаются с помощью твердотельных реле с управляющим напряжением 5 В и током при переключении около 100 мА. Микроконтроллер STM32F103C8T6 имеет выходное напряжение портов ввода/вывода 3,3 В, а максимальный ток 20 мА. Для реализации умощнения выходов микроконтроллера была выбрана микросхема ULN2803AFWG, представляющая сборку из 8 пар Дарлингтона. Выход такой микросхемы аналогичен выходу типа «открытый коллектор», максимальный выходной ток - 500 мА.
Для индикации портов ввода/вывода контроллера используются SMD светодиоды в корпусе 0603. С целью уменьшения количества портов ввода/вывода микроконтроллера STM32F103C8T6 занятых управлением индикации, используются микросхемы 74НС595, которые являются 8-битными сдвиговыми регистрами.
Для подключения напрямую светодиодных лент, используются полевые N-канальные транзисторы IRF3205, усиливающих мощность выходов микросхемы ULN2803AFWG. Выбор этих транзисторов обусловлен в первую очередь большим током канала (до 100 А) и высокой крутизной В АХ.
Устройство питается от напряжения 12 В. Для стабилизации питания были выбраны микросхемы LT1085-5V и LT-1085-3.3V. Они представляют собой линейные
стабилизаторы напряжения с фиксированным напряжением выхода. Выбор обусловлен достаточной для решаемых задач характеристикой стабильности и низкой погрешностью (1%).
Назначение вывода 1 (RST) модуля Е8Р8266-соединение. 12F - перезагрузка модуля.
К выводу 1 подключается 4-й вывод (GPIO 16), используемый для программной перезагрузки модуля при выходе из режимов энергосбережения, кнопка SB1, для ручной перезагрузки модуля Е8Р8266-соединение. 12F, (при запуске которого происходит перезагрузка всего устройства), цепь R16-соединение. С15, реализующая подтягивание порта к питающему напряжению и задержку включения модуля после включения питания. Вывод RST подключается к коллектору транзистора VT5 блока перезагрузки 6. Е8Р8266-соединение. 12F подключается к сетевому модулю USR-соединение. ES1 W5500 по интерфейсу SPI, реализуемому выводами 5-соединение. 7 (GPIO14, GPIO12, GPIO13). Сигнал выбора чипа CS управляется GPIO55. Однако, так как функционально GPIO15 должен быть подтянут к земле, а вывод CS сетевого модуля подтянут к питанию +3,3 В, для передачи сигнала используется цепь R25-соединение. При высокоомном состоянии или низком логическом уровне на выходе GPIO15, на выходе CS также низкий логический уровень, при высоком логическом уровне на выходе GPIO15, на выходе CS высокий логический уровень.
Состояние портов GPIO0, GPIO2 и GPIO15 при запуске Е8Р8266-соединение. 12F определяет режим работы микроконтроллера. В случае если при запуске на GPIO0 и GPIO2 (выводы 18 и 17) установлен высокий логический уровень, а на GPIO15 низкий, микроконтроллер загружается в режиме работы из flash-соединение, памяти (нормальный режим работы). Если на GPIO2 установлен высокий логический уровень, а на GPIO15 и GPIO0 низкий, микроконтроллер переходит в режим перепрограммирования по преобразователю UART. Для реализации нормального режима работы, выводы 17 и 18 подключены через подтягивающие резисторы R17 и R18 к питанию, переключение в режим перепрограммирования происходит с помощью джампера, шунтирующего порт GPIO0 на землю.
Вывод 19 (GPIO4) используется для отправки сигнала на перезагрузку микроконтроллера блока сбора данных и управления. Перезагрузка происходит по нарастающему фронту. Вывод 20 (GPIO5) используется для перезагрузки сетевого модуля. Перезагрузка происходит по низкому логическому уровню.
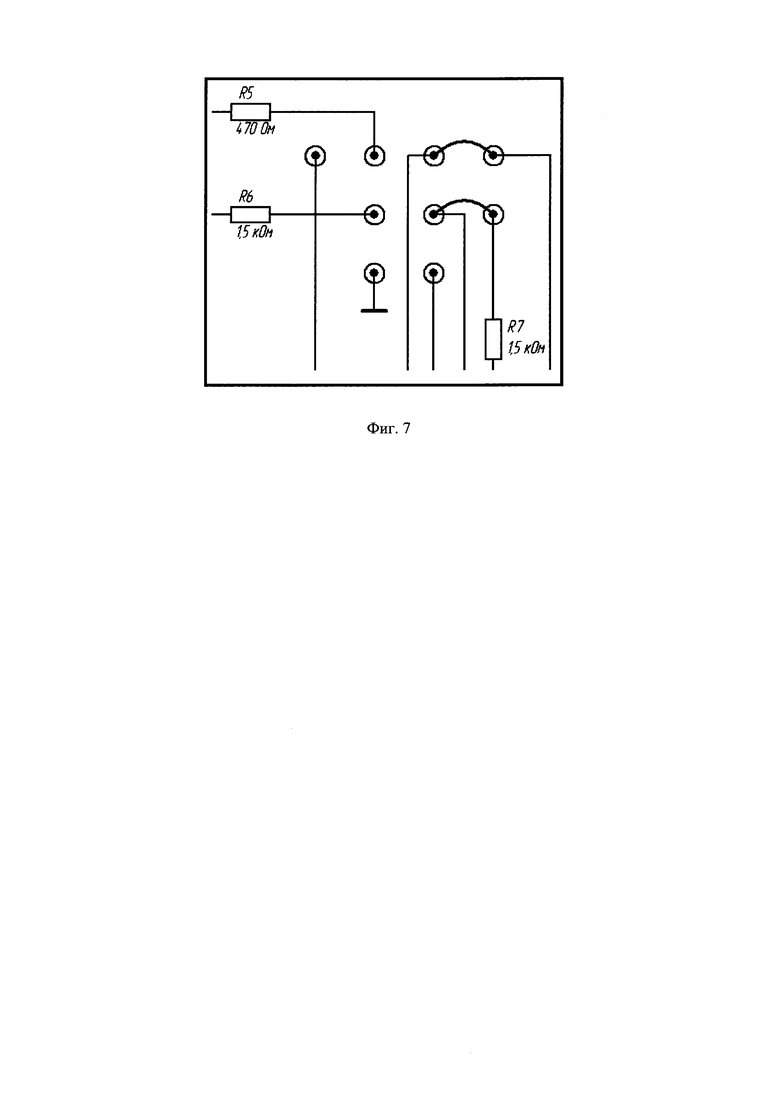
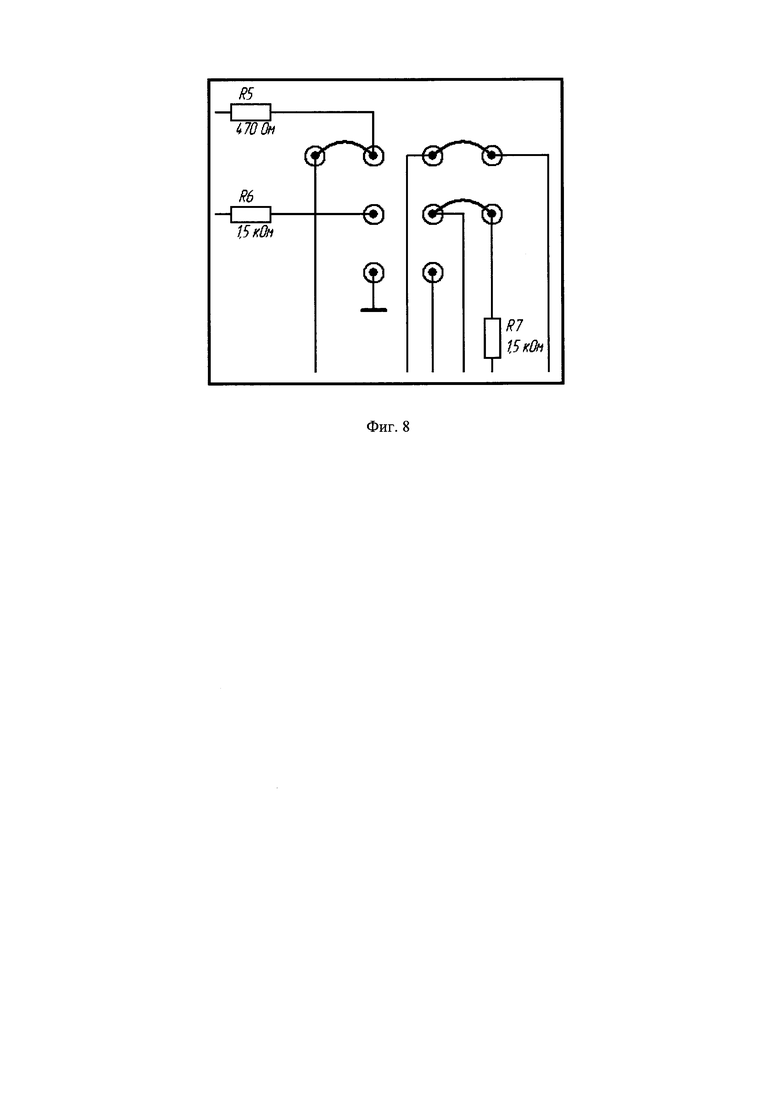
Так как модуль Е8Р8266-соединение. 12F имеет только один двунаправленный UART, для подключения переключения выводов 21 и 22 между микросхемами ST485 и CH340G используются джамперы. При переключении джамперов в крайнее-соединение. правое положение выводы RX и ТХ модуля Е8Р8266-соединение. 12F подключаются к микросхеме ST485, вывод 18 (GPIO 0) при этом отключается от земли (фиг. 7). Также, в этом положении становится возможным подключить третий джампер в крайнее-соединение, левое положение, соединяя при этом 17-соединение. й вывод модуля Е8Р8266-соединение. 12F (являющийся выводом ТХ однонаправленного UART) с микросхемой CH340G, направляя, тем самым, поток отладочных данных на ПК, и запуская режим отладки (фиг. 8).
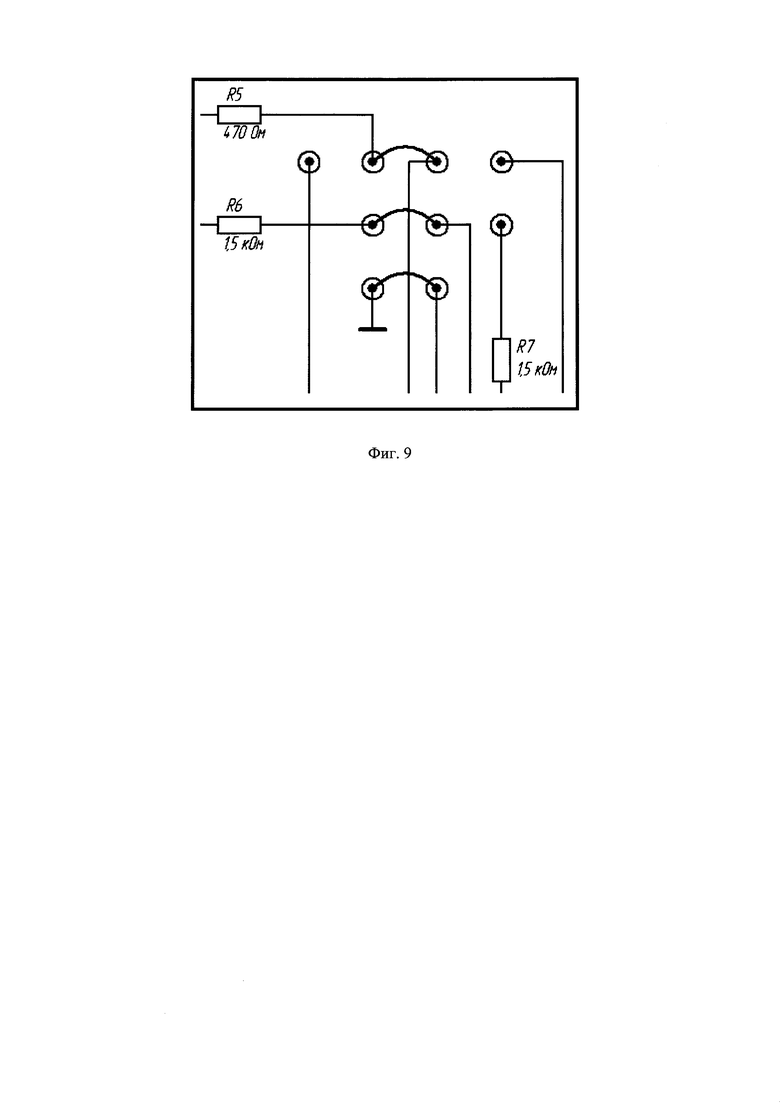
Для подключения выводов 21 и 22 модуля ESP8266-12F к микросхеме CH340G джамперы переключаются в среднее положение, вывод 18 (GPIO 0) при этом шунтируется на землю, запуская режим перепрограммирования микроконтроллера ESP8266 (фиг. 9).
Блок сбора данных и управления служит 2 своеобразным мостом между датчиками, элементами управления и блоком связи 1. Необходимость использования отдельного блока для сбора данных и управления нагрузкой обусловлена необходимостью распараллеливания процессов опросов работы с датчиками и нагрузкой и процессов осуществления взаимодействия с локальным сервером по протоколу MQTT. Кроме того, модуль ESP8266-12F, имеющий встроенный интерфейс WIFI и достаточное количество памяти, для решения задач накопления и обработки данных, имеет недостаточное количество свободных портов ввода/вывода для подключения большого количества датчиков.
Питание контроллера организовано от внешнего блока питания с напряжением 12 В. Для стабилизации питания используются микросхемы LT1085-5V и LT-1085-3.3V. Они представляют собой линейные стабилизаторы напряжения с фиксированным напряжением выхода.
Напряжение 5 В используется для питания микросхем преобразователей интерфейса UART-RS485 - ST485, сдвиговых регистров 74НС595, а также подается на выходы контроллера для подключения питания к внешним устройствам. Напряжение 3,3 В используется для питания микроконтроллеров и сетевого модуля. Для организации смещения на аналоговых выводах при подключении датчиков тока, используется делитель напряжения.
Печатная плата контроллера спроектирована в САПР Sprint Layout 6.0. Проектирование производилось под размер стандартных корпусов D9MG, так как готовое изделие должно крепиться на DIN-рейку в щитке и занимать при этом место, равное площади, занимаемой автоматами такой же ширины.
Печатная плата имеет два слоя, компоненты располагаются с обеих сторон. Выводные компоненты только сверху. Для подключения датчиков и элементов управления используются двухрядные клеммники EELK508V-04P. Для переключения режимов работы платы, а так же отдельных ее портов предусмотрены штыревые разъемы с шагом 2,54 мм для подключения джамперов (фиг. 5).
Собранная аппаратная платформа позволяет выполнять сбор информации во всем ее многообразии с датчиков тока, температуры, влажности, энергопотребления, газа, пожарных датчиков и систем охраны. Осуществлять мониторинг, удаленное автоматизированное или самостоятельное управление инженерными модулями. Форма платы контроллера, устанавливаемой в стандартный корпус под DIN-рейку, а также используемые двухрядные клеммники позволяют быстро и компактно подключать к контроллеру датчики и элементы управления, что упрощает установку системы в целом и уменьшает ее габариты. Возможность переключения с помощью джамперов смещения и нагрузки аналоговых портов позволяет расширить их функциональные возможности, в частности, делает возможным подключение как бесконтактных (электромагнитных) датчиков переменного тока напрямую к контроллеру, без использования дополнительных схем, так и обычных аналоговых датчиков, диапазон выходных напряжений которых от 0 до 3,3 В.
В предлагаемом контроллере управления и мониторинга за счет разделения функций блока сбора данных и управления и блока связи, реализована возможность одновременного выполнения команд сервера и постоянно исполняемых сценариев без временных коллизий. Использование интерфейса RS-485, выводимого через разъем, для взаимодействия блока связи и блоков сбора данных и управления, позволяет подключать до 30 внешних блоков на большом расстоянии (до 500 м), позволяя устанавливать дополнительные блоки по всему помещению объекта контроля.
Умощняющие элементы на плате контроллера позволяют подключать напрямую нагрузку, такую как реле. Так же на портах 8-10 возможно подключение нагрузки до 10 А (максимальный ток ограничивается характеристиками клеммного разъема). Это позволяет осуществлять напрямую управление низковольтным светодиодным освещением.
Общая логика работы контроллера заключается в том, что для выполнения функций предиктивного ремонта, а также реализации концепции интернета вещей, система оснащается как сенсорными элементами, так и элементами управления. Так как концепция разрабатываемой системы предполагает ее установку вместе с электрическим щитком, который кроме электрики, будет оснащен роутером, связь между локальным сервером, реализованном на одноплатном компьютере, и контроллером сбора данных и управления осуществляется через локальную сеть. Подключение контроллера к роутеру возможно по двум каналам: WIFI и Ethernet. Основным является проводное Ethernet-соединение. WIFI используется на объектах, где установка проводного соединения по каким-то причинам невозможна, или в случаях, когда проводное соединение нарушено. Так как используемый для связи с роутером микроконтроллер ESP8266 имеет встроенный беспроводной интерфейс WIFI, но не имеет встроенного Ethernet-интерфейса, подключение происходит через сетевой Ethernet-модуль, коммутируемый по SPI.
Контроллер распознает конкретные ситуации, происходящие на полигоне, и реагирует на них по заранее смоделированному сценарию действий: одна система способна управлять поведением других по заранее предусмотренному алгоритму. От автоматизации различных систем в единую сеть. Исключается необходимость использования десятков пультов, выключателей при управлении отдельными блоками климатического оборудования, системами видеонаблюдения и сигнализации, воротами и прочим.
Взаимодействия блока управления и сбора информации с блоком связи осуществляется по специальному протоколу, а именно: в обычном состоянии блок сбора данных и управления всегда находится в режиме приема, в режим отправки переходит только при получении сообщения от блока связи.
В нижеследующей таблице 1 приводится листинг формата сообщение между блоками:

Список сообщений от блока связи и ответов на них. NN - номер порта от "01" до "25":
Установка режимов портов блока сбора данных и управления производится по следующим запросам:
NN^I - установка порта NN как цифровой вход (только для 11-25);
NN^O - установка порта NN как цифровой выход (порты 1-6 всегда как цифровые выходы);
NN^A - установка порта NN как аналоговый вход (только для 11-18);
NN^Р - установка порта NN как ШИМ выход (только для 7-14, 17-18);
19^W- установка порта 19 как входа шины 1-wire;
20^U9600 - установка портов 20,21 в режиме UART со скоростью 9600;
21^U9600 - установка портов 20,21 в режиме UART со скоростью 9600;
13^U115200 - установка портов 13,14 в режиме UART со скоростью 115200;
14^U115200 - установка портов 13, 14 в режиме UART со скоростью 115200;
Установка состояний портов блока сбора данных и управления производится по следующим запросам:
NN=H - установка порта NN в состояние HIGH (для портов R - это 0 В, для остальных портов 3,3 В);
NN=L - установка порта NN в состояние LOW (для портов R - это высокоомное состояние, для остальных 0 В);
NN=0 - установка порта NN в состояние LOW (в т.ч. PWM)
NN=FFFF - (где FFFF - число от 1 до FFFF в формате HEX), установка PWM-порта. Если порт цифровой, то в состояние HIGH;
02>В - запись одного символа в UART2(A13-TX,A14-RX), где В - символ
03>В - запись одного символа в UART3(D21-TX,D20-RX), где В - символ
02>ВВВ - запись сообщения (до 10 символов) в UART2(A13-TX,A14-RX), где ВВВ - сообщение
03>ВВВ - запись сообщения (до 10 символов) в UART3(D21-TX,D20-RX), где ВВВ - сообщение
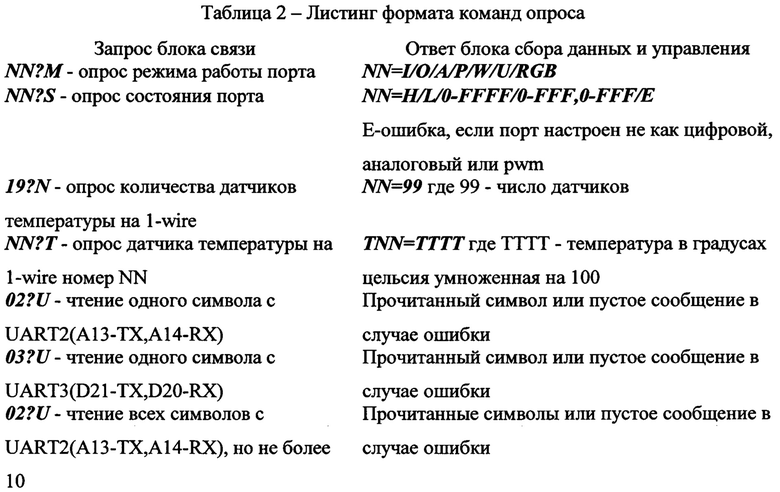
Опросы блока сбора данных и управления производятся специальными командами. В таблице 2 приводится формат запросов блока связи и формат ответов блока сбора данных и управления.

В результате можно обозначить следующие задачи, которые должны решаться на аппаратном уровне (уровне контроллеров):
- перевод сигналов от приборов полевого уровня (датчики) в инженерные единицы и передача информации на станцию сбора данных;
- выполнение алгоритмов вычисления физических величин для учета полученных данных;
- управление техническими системами как с учетом заложенных алгоритмов, так и по указанию головной станции;
- формирование и передача сигналов предупреждающей и аварийной сигнализации. Задачи станции сбора данных (модуля обработки) можно более подробно представить следующим образом:
- структуризация и формализация измерительной информации, накопление динамики изменений;
- обработка и анализ поступающих данных;
- анализ полученных результатов обработки с целью выявления нетипового поведения и поиск на основе результатов анализа перечня возможных причин и факторов, которые могут привести к развитию нештатных ситуаций.
В общем случае полученная информация может содержать шумы, носить неоднородный характер. Это требует применения к полученным данным математических методов, таких как оценка среднего значения наблюдаемой случайной величины, оценка вероятности случайного события по частоте, оценка необходимого числа экспериментов для оценивания вероятности частного события, анализ и кластеризация параметров и другие. Анализ отклонений может осуществляться с использованием как простейших пороговых значений, так и анализом совокупности данных, когда каждый параметр в отдельности находится в допустимом интервале, а совокупность значений говорит о развитии нештатной ситуации.
Положительный технический результат от предлагаемого контроллера состоит в обеспечении эффективного выполнения им функций управления и мониторинга подключенными нагрузками при большом количестве подключенных нагрузок, обеспечении высокой скорости управления подключенными к контроллеру нагрузками и высокой скорости передачи данных от множества подключенных измерительных устройств к агентам пользователя.
Источники информации: [1]. Описание изобретения к патенту Российской Федерации №2454772 «Устройство управления и мониторинга ячейки комплектного распределительного устройства», H02J 13/00; Н02В 13/00, заявлено 30.03.2011, опубликовано 27.06.2012.
[2]. Описание изобретения к патенту Российской Федерации №2447566 «Многообъектные защита, управление и контроль в одном и том же интеллектуальном электронном устройстве», H02J 13/00, заявлено 15.12.2006, опубликовано 10.04.2012.
[3]. Описание полезной модели к патенту Российской Федерации №82048 «Структурная система мониторинга и управления инженерными системами зданий и сооружений - СМИС», G05B 17/02, заявлено 19.12.2008, опубликовано 10.04.2009.
[4]. Описание изобретения к патенту Российской Федерации №2489787 «Автоматизированная система мониторинга и управления освещением городов и автомобильных дорог», H02J 13/00, заявлено 06.10.2010, опубликовано 27.04.2012.
[4]. Патент США №5818725 А «Контроллер мониторинга и управления», H02J 13/00, опубликован 06.10.1998.
[5]. Описание изобретения к патенту Российской Федерации №2407243 «Система и способ мониторинга и управления режимом работы силового трансформатора», H02J 13/00, Н2Н 7/04, G01R 31/34, заявлено 14.12.2005, опубликовано 20.10.2010.
[6]. Описание изобретения к патенту Российской Федерации №2402139 «Система G01R 31/34 мониторинга локомотивных радиостанций цифровой системы радиосвязи на железнодорожном транспорте», H04W 64/00, заявлено 21.05.2009, опубликовано 20.12.2010.
[7]. Патент Японии № JP 2003087974 А, опубликован 28.07.2003.
[8]. Патент США №2003033119 А, опубликован 13.08.2003.
[9]. Описание полезной модели к патенту Российской Федерации №56679 «Микропроцессорная система релейной защиты ячеек комплектных распределительных устройств с элегазовой изоляцией и управления секционным выключателем», G06F 15/16, заявлено 20.04.06, опубликовано. 10.09.06.
[10]. - Патент Кореи №20040061776 «Digital control apparatus for gas insulated switchgear», H02B 13/035, заявлен от 31.12.2002, опубликован. 07.07.2004.
[11]. Патент Кореи №20090085928 «Control and monitoring apparatus for gas insulated switchgear», G08B 21/00, H02B 13/025, заявлен 02.05.2008, опубликован. 08.10.2009.
[12]. Патент Японии №7177623 «Control system for gas insulated switchgear», H02B 1/24, заявлен 12.21.1993, опубликован 14.07.1995.
[13]. Патент Китая на полезную модель №201018218 «Controller for gas insulated metal enclosed switchgear», H02B 13/035, заявлен 02.02.2007, опубликован 02.06.2008.
[14]. Описание изобретения к патенту Российской Федерации №2201130 «Система мониторинга человека-оператора», А61В 5/04, заявлено 22.03.2001, опубликовано 27.03.2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| Узел мониторинга состояния стальных канатов грузоподъемных механизмов различного назначения | 2022 |
|
RU2794525C1 |
| Беспроводной контроллер датчиков | 2018 |
|
RU2701103C1 |
| СИСТЕМА КОМПЛЕКСНОГО МОНИТОРИНГА КЛИМАТА | 2022 |
|
RU2787073C1 |
| Плата системная вычислительного модуля | 2024 |
|
RU2840229C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОТЕЛЬНОЙ | 2017 |
|
RU2656670C1 |
| УСТРОЙСТВО ОБРАБОТКИ И ХРАНЕНИЯ ДАННЫХ | 2022 |
|
RU2790533C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОСАДКОЙ МАЛОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735196C1 |
| ПРОБКОВЫЙ КРАН С БЛОКОМ ТЕЛЕМЕТРИИ | 2022 |
|
RU2793261C1 |
| Система контроля и мониторинга автотранспортных средств | 2020 |
|
RU2738664C1 |
| УСТРОЙСТВО JBOD, СОДЕРЖАЩЕЕ МОДУЛЬ BMC, И СПОСОБ УПРАВЛЕНИЯ ИМ | 2015 |
|
RU2602376C1 |

Изобретение относится к технике связи, системам автоматизации и информатики, а именно к контроллеру, выполняющему функции мониторинга и управления объектами инженерной инфраструктуры. Техническим результатом изобретения является упрощение контроллера управления и мониторинга, эффективность выполнения контроллером функций управления и мониторинга подключенными нагрузками, обеспечение высокой скорости управления подключенными к контроллеру нагрузками и высокой скорости передачи данных от множества подключенных измерительных устройств к агентам пользователя. Технический результат достигается за счет того, что контроллер содержит два взаимодействующих по проводному каналу связи независимых вычислительных блока: блок связи и блок сбора данных и управления, один из которых выполняет функции управления подключенными к контроллеру нагрузками, а также получения данных с подключенных к нему измерительных устройств, а другой выполняет функции взаимодействия с внешними агентами пользователя, аппаратурой, обеспечивающей работу этих агентов и позволяющей формировать команды управления нагрузками. 8 з.п. ф-лы, 2 табл., 9 ил.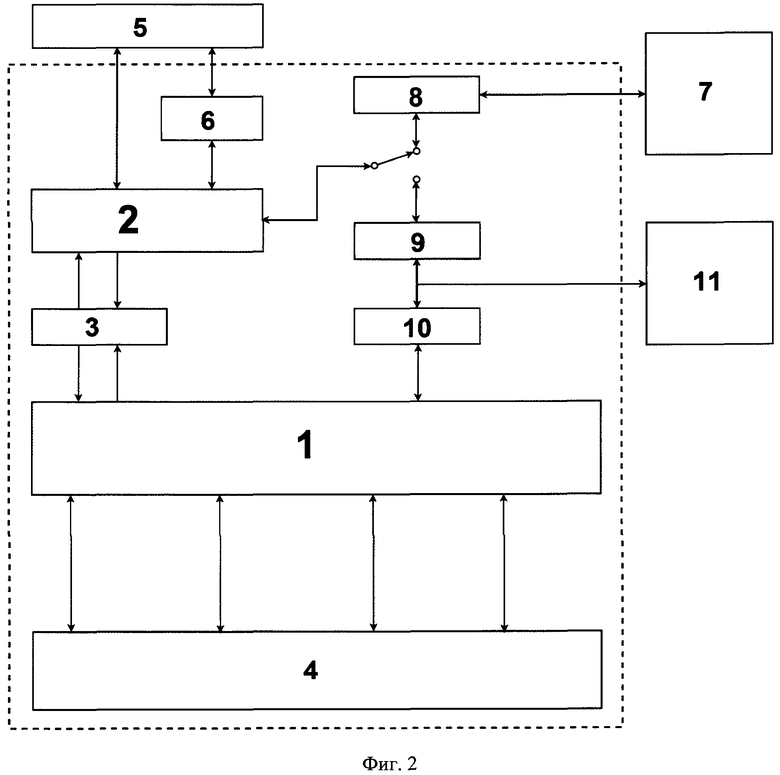
1. Контроллер управления и мониторинга объектами инженерной инфраструктуры, содержащий блок связи, по меньшей мере один блок сбора данных и управления, преобразователи, осуществляющие взаимодействие между вышеуказанными блоками по интерфейсу через запросы блока связи и ограниченные по объему и времени ответы блоков сбора данных и управления, аналоговые датчики и сенсорные элементы управления, блок перезагрузки микроконтроллеров, сетевой Ethernet-модуль, блок преобразования UART-USB и внешние порты, при этом блок связи подключен к роутеру локальной сети по двум каналам: по каналу WIFI, используемому, если проводного соединения нет или оно нарушено, и по проводному Ethernet-соединению посредством по меньшей мере одного микроконтроллера ESP8266, имеющего встроенный беспроводной интерфейс WIFI через сетевой Ethernet-модуль, коммутируемый по SPI, вышеупомянутый блок сбора данных и управления основан на микроконтроллере STM32F103C8T6, элементах, усиливающих мощность выходов микроконтроллера, и элементах, обеспечивающих возможность расширить аналоговые порты, и суммарно имеет по меньшей мере 25 управляющих входов/выходов типа «открытый коллектор» для управления реле, типа «открытый сток», рассчитанных на максимальный ток, каналов АЦП с переключателями, универсальных GPIO для подключения устройств с интерфейсами, при этом аналоговые датчики и сенсорные элементы управления подключены к плате контроллера STM32F103C8T6, установленной в стандартный корпус под DIN-соединение-рейку, через двухрядные клеммники, порты ввода/вывода для подключения датчиков нагрузки, джамперы управления смещением портов аналогового ввода и джамперы управления режимом работы контроллера, причем блок перезагрузки микроконтроллеров, предназначенный для повышения надежности работы контроллера, реализован посредством транзисторной схемы, где сигнал RESET STM по нарастающему фронту открывает транзистор, перезагружающий микроконтроллер STM32F103C8T6, сигналом RESET STMRSE управляется порт GPI04 микроконтроллера ESP8266, сигнал RESET ESP по нарастающему фронту открывает транзистор, перезагружающий микроконтроллер ESP8266, и одновременно транзистор, блокирующий ложный сигнал RESET STM, возникающий вследствие перезагрузки микроконтроллера ESP8266, сигналом RESET_ESP управляется порт РВ9 микроконтроллера STM32F103C8T6, позволяя блоку связи и блоку сбора данных и управления осуществлять взаимную перезагрузку в случае, если один из блоков зацикливается и перестает связываться с другим.
2. Контроллер по п. 1, в котором преобразователи выполнены типа UART-RS-485 на основе микросхем ST4ST485.
3. Контроллер по п. 1, в котором взаимодействие между блоком связи и блоком сбора данных и управления осуществляется по интерфейсу RS-485.
4. Контроллер по п. 1, в котором по меньшей мере 3 входа/выхода типа «открытый коллектор» для управления реле, по меньшей мере 7 входов/выходов типа «открытый сток», рассчитанных на максимальный ток, 8 каналов АЦП с переключателями, 7 универсальных GPIO для подключения устройств с интерфейсами 12С, SPI, UART, 1-wire.
5. Контроллер по п. 1, в котором 3 выхода типа «открытый сток» рассчитаны на значение максимального тока, равное 10 А, для управления светодиодными лентами напрямую.
6. Контроллер по п. 1, в котором микроконтроллер ESP8266 выполнен по меньшей мере с одним двунаправленным преобразователем UART, предназначенным для его прошивки и отладки, с помощью блока преобразования UART-USB для подключения платы к компьютеру.
7. Контроллер по п. 1, в котором для задействования блока преобразования UART-USB для связи с блоком сбора данных и управления в микроконтроллере ESP8266 выполнены съемные перемычки, переключаемые в случае необходимости смены режима отладки на режим нормальной работы.
8. Контроллер по п. 1, в котором диапазон выходных напряжений аналоговых датчиков для подключения к портам ввода/вывода составляет от 0 до 3,3 В.
9. Контроллер по п. 3, в котором через интерфейс соединение RS-485 подключается до 30 внешних блоков сбора данных и управления на расстоянии до 500 м.
| ПРОГРАММИРУЕМАЯ ЭЛЕКТРОННАЯ ПЛАТА И СПОСОБ КОММУНИКАЦИИ ЭТОЙ ПЛАТЫ С СЕРВЕРОМ | 2010 |
|
RU2451341C1 |
| WO 2018104929 A1, 14.06.2018 | |||
| WO 2017149526 A2, 08.09.2017 | |||
| СПОСОБ И СИСТЕМА УДАЛЕННОГО МОНИТОРИНГА ОБЪЕКТОВ | 2016 |
|
RU2649542C1 |
| Машина для перелопачивания, увлажнения и дезинфекции солода на току | 1948 |
|
SU82048A1 |

