ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к системе прогностики и удаленного мониторинга (далее СПиУМ) и применяющегося в ней способа для определения девиаций и отклонений в поведении объекта контроля. Заявленное изобретение может быть использовано в различных сферах промышленности, здравоохранения, экономики, социальной сфере, сельском хозяйстве и других сферах, в которых может использоваться прогностическое моделирование поведения объекта и его удаленный автоматизированный мониторинг.
УРОВЕНЬ ТЕХНИКИ
На сегодняшний день практически все объекты генерации оборудованы развитыми АСУ ТП (Автоматизированная система управления технологическим процессом). Применяемые АСУ ТП по своей природе не являются инструментами анализа изменений в техническом состоянии, хотя во многом служат для предотвращения наступления аварийного события. Статистика инцидентов и аварий свидетельствует о том, что автономные и встроенные в АСУ ТП системы мониторинга и диагностики энергетического оборудования недостаточно эффективны [1].
Контроль технического состояния основан на сравнении соответствий значений параметров и критериев их пределам и нормам, и параметров с эталонными энергетическими характеристиками. Такие системы функционируют как набор модулей, анализирующих работу различных подсистем объекта мониторинга. Для определения изменений в техническом состоянии и поиска их причин предполагается трудозатратный автоматизированный анализ работы систем мониторинга большим количеством экспертов. Применяемые методы бессильны при недостоверной или неполной информации о пределах и нормах ключевых технологических параметров, критериев, взаимосвязях между параметрами. В большинстве случаев это является причиной несвоевременного выявления зарождения дефектов, их бесконтрольного развития, когда техническое состояние является «работоспособным» и, как следствие, приводит объект в «неработоспособное» или «предельное» состояние. Мероприятия по техническому обслуживанию осуществляются, как правило, после срабатывания предупредительной или аварийной сигнализаций. Дефекты оборудования определяются после его вскрытия, что приводит к «недоремонтам» вследствие отсутствия необходимых запасных частей и технических решений для устранения проблем.
В настоящее время важно не только определять вид технического состояния, в частности: «работоспособное», «частично работоспособное», «предельное», но и отслеживать изменения в уже определенном (первом и втором) состоянии [2]. Наиболее остро стоит задача контроля изменений в «работоспособном» техническом состоянии оборудования, вызываемых зарождением любого дефекта деталей, узлов и систем из существующего множества для обнаружения нежелательных тенденций и прогнозирования их развития с целью предотвращения инцидентов и аварий.
На данный момент известно множество решений, реализующих процессы прогностического моделирования поведения объекта мониторинга, для выявления отклонения показателей его технического состояния и прогнозирования выхода из строя тех или иных его узлов.
Известно устройство и способ для контроля технической установки, содержащей множество систем, в частности установки электростанции (патент RU 2313815, СИМЕНС АКЦИЕНГЕЗЕЛЛЬШАФТ, 27.12.2007). В данном патенте применяется динамическая обучаемая модель для прогнозирования выхода из строя элементов контролируемого объекта, в частности, энергетической установки. Модель основана на применении нейронных сетей и/или генетических алгоритмов и реализуется за счет использования модуля анализа, который ищет в рабочих параметрах или рабочих и структурных параметрах системы зависимости между рабочими параметрами или рабочими и структурными параметрами посредством методов искусственного интеллекта и интегрирует идентифицированные при этом зависимости в динамическую модель в качестве новых зависимостей и тем самым улучшает ее в отношении повышения точности прогнозирования поведения системы, и посредством этого динамическая модель системы является улучшаемой в отношении повышения точности прогнозирования поведения системы во время эксплуатации системы, причем посредством модуля анализа являются определяемыми выходные данные, которые характеризуют мгновенное и/или будущее поведение в эксплуатации системы.
Недостатком данного решения является использование одной модели, а также принципа нейросети, для которой необходимы как сложные вычислительные мощности, так и постоянное обучение, обусловленное сложной моделью прогностики, что не позволяет быстро и точно определить возможное будущее нарушение работы объекта контроля.
Известна система и способ для прогнозирования жизненного цикла работы газотурбинной установки (заявка US 20160160762, General Electric Company, 09.06.2016), содержащая блок анализа состояния турбины, определяющий его на основании параметров ее состояния, в частности температуры, вибрационных показателей и т.п., которые обрабатываются с помощью физической модели турбины. Каждому из полученных параметров объекта контроля присваивается весовой коэффициент, на основании которого осуществляется контроль работы объекта для последующего сравнения с параметрами работы турбины и подстройки ее работы для увеличения жизненного цикла.
Данное решение не содержит моделирование процесса работы турбины с помощью метода обучаемых моделей на базе эталонных выборок параметров контроля, в частности, техники оценки многомерных состояний MSET (Multivariate State Estimation Technique) [3]-[4], что не позволяет быстро и точно определить возможное будущее нарушение работы объекта контроля с помощью оперативного обучения прогностической модели работы оборудования.
Известна система онлайн контроля за технологическим процессом на основании многомерного анализа (патент US 8014880, Fisher-Rosemount Systems Inc., 06.09.2011), которая выполняет анализ состояния объекта на основании многовариантной модели, построенной на базе тренировочного набора данных, получаемого от набора датчиков, и реализует построение ряда моделей текущего состояния работы оборудования и моделей нормального состояния оборудования для их дальнейшего сравнения.
Недостатком данного решения является отсутствие обновления модели в зависимости от режима работы объекта контроля и обновления моделей прогнозирования работы объекта контроля на основании фильтрации эталонной выборки, строящейся на показателях, поступающих от объекта контроля.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей изобретения является создание новой системы и реализуемого в ней способа для удаленного мониторинга и диагностики технического состояния удаленного контроля, которая будет обеспечивать прогнозирование отклонений в будущей работе объекта контроля и своевременно предупреждать о времени наступления такого рода отклонений.
Техническим результатом является повышение точности прогнозирования отклонения параметров работы объекта контроля, за счет использования множества прогностических моделей работы объекта контроля и оперативного обнаружения отклонения в каждой модели, отображающей работу объекта контроля в заданном режиме.
Применение принципа MSET моделирования имеет широкий спектр и может использоваться в различных отраслях промышленности. Любой объект, который может передавать параметры своего технического состояния с помощью различных датчиков, сенсоров и т.п. может являться объектом прогностического мониторинга [5].
Заявленный результат достигается с помощью реализации способа прогностики и удаленного мониторинга состояния объектов, который заключается в выполнении этапов, на которых:
- получают данные от объекта контроля, характеризующие показатели параметров работы упомянутого объекта;
- формируют на основании полученных параметров объекта эталонную выборку показателей работы объекта, состоящую из значений упомянутых показателей, представляющих собой точки выборки, причем упомянутая выборка соответствует временному промежутку непрерывной работы объекта контроля;
- осуществляют построение матрицы состояния из компонентов точек эталонной выборки, в которой компонентами являются значения упомянутых показателей работы объекта контроля;
- на основании MSET метода с помощью упомянутой матрицы состояния осуществляют построение эмпирических моделей прогностики состояния объекта контроля, каждая из которых отображает наблюдаемую точку состояния объекта контроля в многомерном пространстве показателей работы объекта в точку, моделирующую состояние объекта;
- определяют по разности компонентов наблюдаемой точки и точки, моделирующей состояние объекта, компоненты невязок, на основании которых рассчитывают критерий Т2, который характеризует отклонение показателей параметров объекта контроля от модели в наблюдаемой точке пространства, причем Т2 является квадратичной формой нормализованных невязок, коэффициентами которой являются элементы псевдообратной матрицы корреляционной матрицы для нормализованных невязок эталонной выборки;
- определяют разладки, отображающие степень влияния показателей работы объекта на упомянутое отклонение показателей параметров объекта контроля, как разность критериев Т2 и квадратичных форм нормализованных невязок, с коэффициентами псевдообратной матрицы для матрицы, полученной из упомянутой корреляционной матрицы, в которой строка и столбец, соответствующие данному показателю работы объекта, заменены на нулевое значение;
- осуществляют анализ поступающей информации от объекта контроля с помощью полученного набора эмпирических моделей путем сравнения полученных показателей объекта контроля с параметрами модели в заданный промежуток времени;
- определяют с помощью упомянутого критерия Т2 степень отклонения поступающих показателей параметров объекта контроля за заданный промежуток времени от показателей эмпирических моделей и выявляют разладки для таких показателей;
- выполняют ранжирование вычисленных разладок для выявления показателей, вносящих наибольший вклад в изменение состояния объекта контроля;
- модифицируют эталонную выборку с помощью ее пополнения точками за новый промежуток времени и фильтрацией точек, соответствующих режиму функционирования, описываемому моделью, и соответствующих новому функциональному состоянию объекта контроля;
- обновляют на основании отфильтрованной выборки эмпирические модели; и
- формируют сигнал, сообщающий об отклонении, по меньшей мере, одного параметра объекта контроля на основании обновленной модели.
В частном варианте осуществления эмпирические модели представляют собой статистические и динамические модели.
В другом частном варианте осуществления для каждого типа моделей устанавливается шаг дискретизации.
В другом частном варианте осуществления каждая модель задается набором рассчитываемых по методу MSET матриц.
В другом частном варианте осуществления при расчете критерия Т2 компоненты невязок нормализуются по средним значениям невязок и их среднеквадратичным отклонениям для эталонной выборки.
В другом частном варианте осуществления эмпирические модели создаются для множества различных режимов работы объекта контроля.
В другом частном варианте осуществления при изменении режима работы объекта контроля выполняется автоматическое переключение соответствующей данному режиму эмпирической модели.
В другом частном варианте осуществления на основании данных, характеризующих отклонения показателей работы объекта контроля, формируют матрицу дефектов.
В другом частном варианте осуществления для каждого выявленного дефекта на основании матрицы дефектов определяют степень влияния на него разладок.
В другом частном варианте осуществления степень влияния представляет собой весовой коэффициент, отображающий степень влияния разладки на дефект.
В другом частном варианте осуществления при ранжировании разладок выполняют суммирование весовых коэффициентов.
В другом частном варианте осуществления матрица дефектов обновляется по мере поступления данных технологических параметров объекта контроля.
Заявленный технический результат достигается также за счет системы прогностики и удаленного мониторинга (СПиУМ) состояния объектов контроля, относящихся к различным технологическим средствам, которая содержит группу датчиков, связанных с объектом контроля и передающих информацию, о параметрах упомянутого объекта, на первичные контроллеры, которые связаны с основным сервером АСУ ТП объекта контроля, предназначенным для накопления получаемых с контроллеров данных и последующей передачи упомянутых данных в зону нижнего уровня СПиУМ, содержащей, по меньшей мере, сервер нижнего уровня СПиУМ, из которой посредством сети передачи данных, данные параметров объекта контроля передаются в зону верхнего уровня СПиУМ, которая содержит сервер верхнего уровня, выполненный с возможностью выполнения способа для удаленного мониторинга и прогностики состояния технических объектов, описанного выше.
В частном варианте осуществления заявленной системы передача данных от контроллеров в зону нижнего уровня СПиУМ осуществляется посредством ЛВС.
В другом частном варианте осуществления заявленной системы зона нижнего уровня СПиУМ является демилитаризованной зоной, организованной с помощью сетевых экранов.
В другом частном варианте осуществления заявленной системы прием и передача информации через зону нижнего уровня СПиУМ выполняется через упомянутые сетевые экраны.
В другом частном варианте осуществления заявленной системы передача данных от основного сервера АСУ ТП в зону нижнего уровня СПиУМ осуществляется с помощью ОРС протокола (OLE for Process Control).
В другом частном варианте осуществления заявленной системы сеть передачи данных представляет собой сеть Интернет.
В другом частном варианте осуществления заявленной системы передача информации посредством сети Интернет осуществляется через защищенный канал передачи данных.
В другом частном варианте осуществления заявленной системы сервер верхнего уровня выполнен с возможностью автоматического обновления эмпирических моделей, при поступлении данных от объекта контроля.
В другом частном варианте осуществления заявленной системы сервер верхнего уровня выполнен с возможностью передачи информации о состоянии объекта контроля на удаленные устройства пользователей.
В другом частном варианте осуществления заявленной системы передача данных на удаленные устройства пользователей осуществляется с помощью проводного и/или беспроводного типа связи.
В другом частном варианте осуществления заявленной системы проводной тип связи представляет собой ЛВС Ethernet типа.
В другом частном варианте осуществления заявленной системы беспроводной тип связи выбирается из группы: Wi-Fi, GSM, WiMax или MMDS (Multichannel Multipoint Distribution System).
В другом частном варианте осуществления заявленной системы данные о состоянии объекта контроля передаются с помощью сообщений электронной почты и/или SMS-сообщений и/или PUSH-уведомлений на удаленные устройства пользователей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует архитектуру СПиУМ.
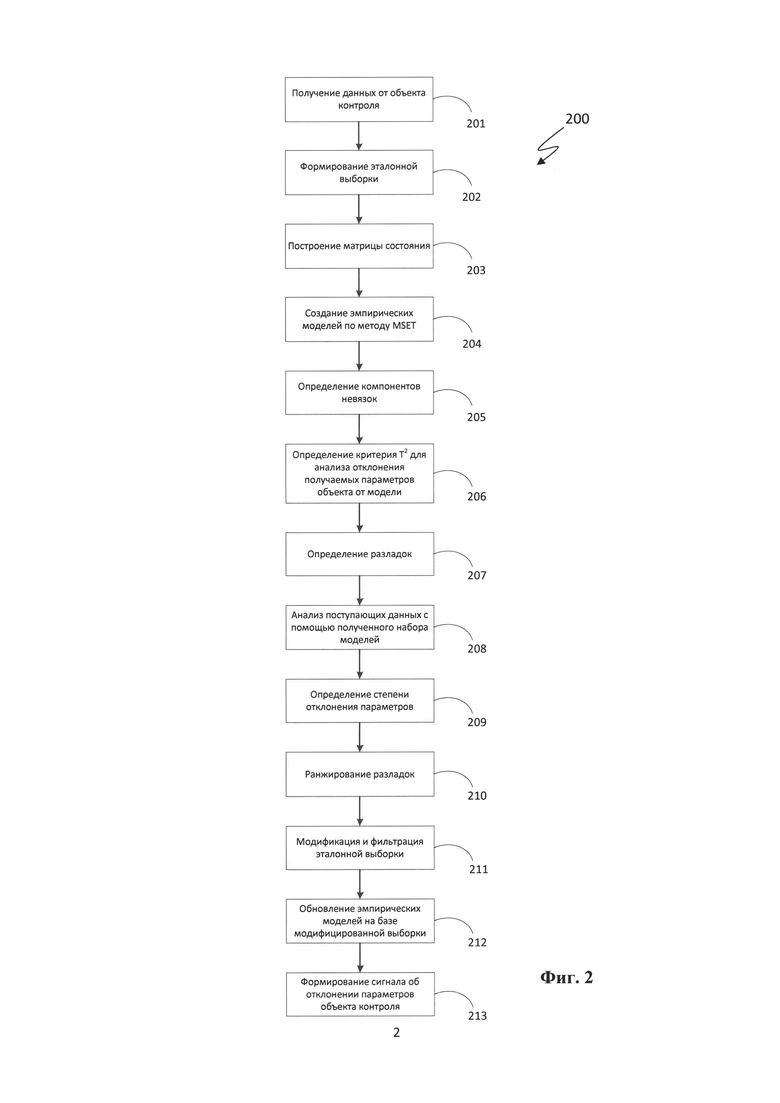
Фиг. 2 иллюстрирует основные этапы выполнения заявленного способа.
Фиг. 3 иллюстрирует графический интерфейс пользователя СПиУМ.
Фиг. 4 иллюстрирует последовательность выполнения этапов при выполнении прогностического моделирования.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 представлена общая архитектура заявленного решения, в частности СПиУМ (100). СПиУМ (100) состоит из систем нижнего (15) и верхнего (18) уровней. Оба уровня реализованы на серверах (150, 180), выполняющих специальные функции. Задачей сервера нижнего уровня (150) является сбор, первичная обработка, буферизация и обеспечение передачи данных на сервер верхнего уровня (180), задача которого - решение аналитических задач, связанных с осуществлением контроля и прогностики состояния объектов контроля (10).
Под объектом контроля следует понимать различные технические средства, например, энергетическое оборудование (турбоагрегаты, различного рода установки, реакторы и т.п.), оборудование для контроля процесса производства (конвейеры, роботизированное оборудование), отопительное оборудование (котлы, насосы и т.п.).
В качестве объекта мониторинга могут также выступать транспортные средства, например автомобили, железнодорожный транспорт, самолеты и т.д.
Процесс сбора и передачи данных реализован на основе двухсерверной схемы. Процесс получения данных начинается на нижнем уровне, уровне объекта мониторинга (контроля) (10), где осуществляется запись значений эксплуатационных параметров, например температуры, вибрации, степень износа, скорости вращения, силы тока, напряжения, частоты и т.п., с помощью датчиков (11), которыми оснащен объект контроля (10). Показания с группы датчиков (11) направляются в первичные контроллеры (12), откуда затем передаются на основной сервер АСУ ТП (130).
Сервер системы нижнего уровня (150) СПиУМ (100) может быть установлен в собственном шкафу в специализированном помещении серверной, в непосредственной близости от имеющихся серверов АСУ ТП объекта (13). Передача данных с технологической сети (14), образованной с помощью одного или нескольких серверов АСУ ТП (130), осуществляется на сервер нижнего уровня СПиУМ (150). Передача данных на сервер нижнего уровня (150) может осуществляться с использованием протокола ОРС (OLE for Process Control) и технологии ОРС туннелирования.
Зона нижнего уровня СПиУМ (15) может быть выполнена в виде демилитаризованной зоны, организованной с помощью сетевых экранов (151), которые осуществляют прием данных от сервера АСУ ТП (130) и передачу данных в зону верхнего уровня (18). Такая схема изолирует работу АСУ ТП объекта (130) и системы нижнего уровня (15), а также обеспечивает сохранность получаемых данных при возникновении внештатных ситуаций.
Данные показателей технологического состояния, получаемые от датчиков (11) объекта контроля (10), передаются в единый архив сервера верхнего уровня СПиУМ (180). Передача данных на сервер верхнего уровня (180) осуществляется с помощью ЛВС, например глобальной сети Интернет. Для передачи данной информации может использоваться защищенный канал передачи данных ЛВС, который обеспечивает передачу данных в режиме реального времени без потери качества, используя процедуру синхронизации серверов (150, 180) нижнего (15) и верхнего уровней (18). Кроме того, получение данных в полном объеме на сервере верхнего уровня (180) обеспечивает возможность подробного анализа технического состояния объекта специалистами, работающими с системой верхнего уровня (18), что дает возможность контролировать техническое состояние всех объектов мониторинга (10) силами этих специалистов.
Сервер верхнего уровня (180) настроен на аналитическую обработку данных в режиме онлайн, автоматически осуществляемую средствами эмпирического моделирования. Эмпирические модели строятся статистическими методами на базе выборки значений технологических параметров объекта за период работы, принимаемый в качестве эталонного.
Согласно Фиг. 2 показан способ (200), который выполняется на упомянутом сервере верхнего уровня (180), с помощью которого реализуется мониторинг и анализ технического состояния объекта контроля (10).
На этапе (201) сервер верхнего уровня (180) получает данные, характеризующие показателя технологического состояния объекта мониторинга (10) согласно показаниям, полученными с датчиков (11).
Эмпирические модели для прогностики состояния объекта контроля (10) строятся статистическими методами на базе выборки значений технологических параметров объекта (10) за период работы, принимаемый в качестве эталонного. На этапе (202) формируют на основании полученных параметров объекта контроля (10) эталонную выборку показателей работы объекта (10), состоящую из значений упомянутых показателей технологического состояния объекта (10). Каждый из показателей представляет собой точку выборки, которая соответствует временному промежутку непрерывной работы объекта контроля.
Далее на этапе (203) выполняется построение матрицы состояния из компонентов точек эталонной выборки, в которой компонентами являются значения упомянутых показателей работы объекта контроля (10). Далее на этапе (204) на основании MSET метода с помощью упомянутой матрицы состояния, полученной на шаге (203), осуществляют построение эмпирических моделей прогностики состояния объекта контроля, каждая из которых отображает наблюдаемую точку состояния объекта контроля в многомерном пространстве показателей работы объекта (10) в точку, моделирующую состояние объекта (10). С помощью матрицы состояний выполняется расчет для каждой точки эталонной выборки точка соответствующей эмпирической модели.
В моделях, построенных с помощью метода MSET, мера отклонения в поведении задается с помощью подобия - функции, оценивающей степень подобия точек выборки. В методе MSET по выборке эталонного периода строится матрица из компонентов наиболее характерных точек эталонной выборки, т.е. точек, характеризующих параметры, которые при отклонении могут привести к выходу из строя всего объекта контроля (10).
На этапе (205) определяются компоненты невязок на основании разности компонентов наблюдаемой точки и точки, моделирующей состояние объекта. На основании определенных компонентах невязок рассчитывают критерий Т2 (этап 206), который характеризует отклонение показателей технологических параметров объекта контроля от модели в наблюдаемой точке пространства. Статистический критерий Т2 является квадратичной формой нормализованных невязок, коэффициентами которой являются элементы псевдообратной матрицы корреляционной матрицы для нормализованных невязок эталонной выборки. Отклонения моделей от точек эталонной выборки (невязки) обрабатывается статистически для построения обратных ковариационных матриц, используемых для расчета значения статистического критерия Т2 (этап 206) соответствия произвольной точке пространства технологических параметров ее модели, а также для расчета разладок компонентов - числовых характеристик степени влияния невязок каждого компонента на величину критерия Т2.
На этапе (207) определяют разладки, отображающие степень влияния показателей работы объекта контроля (10) на упомянутое отклонение показателей технологических параметров объекта контроля, как разность критериев Т2 и квадратичных форм нормализованных невязок, с коэффициентами псевдообратной матрицы для матрицы, полученной из упомянутой корреляционной матрицы, в которой строка и столбец, соответствующие данному показателю работы объекта, заменены на нулевое значение.
На этапе (208) осуществляют анализ поступающей информации от объекта контроля (10) с помощью полученного набора эмпирических моделей путем сравнения полученных показателей объекта контроля (10) с параметрами модели в заданный промежуток времени.
Далее на этапе (209) определяют с помощью упомянутого критерия Т2 степень отклонения поступающих показателей параметров объекта контроля за заданный промежуток времени от показателей эмпирических моделей и выявляют разладки для таких показателей. Решение об отклонении в поведении для полученных показателей технологических параметров принимается по единственному расчетному критерию Т2, а причины изменений характеризуются набором рассчитанных разладок. Модель имеет статистический характер, поэтому для вывода об изменении технического состояния объекта необходимо обнаружить явный выход критерия Т2 за предельное значение для некоторого интервала времени (не в отдельные моменты этого интервала).
СПиУМ, автоматически выявляет на ранней стадии в режиме on-line изменения в «работоспособном» техническом состоянии по отклонению от нормы одного интегрального показателя - критерия Т2 и локализованный перечень главных аргументов (технологических параметров), вносящих основной вклад в отклонение технического состояния от эталонной статистической модели, что значительно облегчает идентификацию любого зарождающегося дефекта из существующего множества, состав аргументов подбирается таким образом, чтобы они соответствовали главным угрозам технического устройства и не маскировали зарождение этих угроз менее существенными проблемами.
Пусть

элементы выборки для моментов времени tj.
Соответственно, матрица состояний D определяется соотношением:

Она составлена из наиболее характерных точек выборки.
Пусть x  y обозначает операцию подобия (функцию двух векторов технологических параметров x и y).
y обозначает операцию подобия (функцию двух векторов технологических параметров x и y).
Тогда "произведение"

где значок обозначает операцию подобия, можно рассматривать как разложение вектора измерения xin по векторам обучающего набора, составляющего матрицу состояний. Вектор разложения  нормируют в соответствии с формулой Надарая-Ватсона:
нормируют в соответствии с формулой Надарая-Ватсона:
С помощью вектора w можно получить оценку «нормального» значения xest вектора измерений:

который является проекцией вектора измерений xin на пространство «нормальных» состояний системы, задаваемое матрицей D. Поэтому разница этих векторов (невязка)
является оценкой разладки системы, ее отхода от нормального состояния. Для всей выборки производится нормализация невязки

где σi - стандартные отклонения невязки для i-го измерения от его среднего значения.
Пусть Σ - ковариационная матрица для векторов ε:
 ,
,
Тогда
Для расчета разладки j используется псевдообратная матрица к матрице, полученной из Е обнулением j-ых строки и столбца. Рассчитывается аналогичная квадратичная форма для этой псевдообратной матрицы и вычитается из Т2. Результат - j-ая разладка.
Метод MSET также дает возможность рассчитать предельное значение Т2 для заданного уровня достоверности. Если значение Т2 не превосходит это предельное значение, принимается решение о соответствии полученных параметров поведению объекта в эталонный период. Если же предельное значение превышено, считается, что полученный набор параметров не соответствует поведению объекта в эталонный период. В этом случае ранжирование разладок указывает на параметры, поведение которых вносит наибольший вклад в обнаруженные изменения технического состояния объекта контроля (этап 210).
Далее на этапе (211) выполняют модификацию эталонной выборки с помощью ее пополнения точками за новый промежуток времени и фильтрацией точек, соответствующих режиму работы, описываемому моделью, и соответствующих новому техническому состоянию объекта контроля.
Из всех эксплуатационных параметров, сигналы которых поступают с сервера нижнего уровня СПиУМ (150), отбираются только те показатели, изменения которых способны привести к изменению в техническом состоянии всего контролируемого объекта (10). При построении моделей осуществляется построение статистических и динамических моделей. Таким образом, из множества различных параметров только 100-130 параметров участвуют в создании модели.
Также к массивам данных, требуемым для построения моделей, предъявляются дополнительные требования:
- для статистической модели предпочтительным и достаточным шагом дискретизации является запись изменения значений раз в 10 минут, в то время как для динамической модели - раз в 1 секунду;
- объем архивных данных, принимаемый в качестве эталонного, перед построением модели должен быть накоплен в течение определенного периода времени, например в течение одного года непрерывной работы энергетической установки.
На этапе (212) обновляют на основании отфильтрованной выборки эмпирические модели и формируют сигнал, сообщающий об отклонении, по меньшей мере, одного параметра объекта контроля (10) на основании обновленной модели (этап 213).
Таким образом, онлайн модель характеризует степень изменения технического состояния единственным параметром - критерием Т2 и определяет степень влияния изменения по каждому сигналу, полученному с датчиков (11), на зафиксированное отклонение.
Приведенная процедура обработки сигналов датчиков объекта обладает высокой чувствительностью к изменениям в поведении диагностируемого технического объекта (10), что позволяет выявлять эти изменения на ранней стадии и определять факторы, которые вызывают эти изменения.
Наиболее важным аспектом СПиУМ (100) является полная автоматизация определения изменений в техническом состоянии и перечня главных параметров, вносящих наибольший вклад в работу объекта контроля (10), ранжированных по весам, что позволяет исключить субъективный фактор как в режиме онлайн, так и в режиме офлайн при расследовании инцидентов и аварий на основе предоставляемых архивных данных.
Работа объекта мониторинга (10) связана с происходящими в нем процессами в различных масштабах времени и с различным уровнем значимости для его безопасного функционирования.
В качестве примеров можно рассмотреть следующее. Перепады давления на фильтрах КВОУ турбоагрегата изменяются быстрее многих прочих процессов, например процессов, оказывающих большое влияние на вибрацию. В то же время развитие вибрации объекта мониторинга (10) может привести к более серьезным последствиям, однако из-за более быстрых изменений на фильтрах КВОУ сигналы, связанные с этими изменениями, вносят больший вклад в критерий Т2, маскируя тем самым потенциально более опасные по своим последствиям явления. По этой причине изложенными выше средствами моделирования определяются наиболее влияющие на критерий Т2 разладки, определяются маскирующие наиболее важные сигналы и удаляются из основной онлайн модели.
Для учета влияния исключенных параметров используются вспомогательные модели и модули физического моделирования.
Поведение объекта турбоагрегата при различных нагрузках может существенно различаться, поэтому для моделирования его поведения строится не единственная модель, а набор моделей, соответствующих различным режимам работы. Переключение между моделями режимов производится при онлайн моделировании автоматически в соответствии с условиями смены режима функционирования объекта контроля (10). В СПиУМ (100) создаются онлайн модели для различных режимов работы объекта мониторинга (10), например, в случае энергетического оборудования:
- Режим номинальной нагрузки;
- Режим средней нагрузки;
- Режим низкой нагрузки;
- Режим повышения нагрузки;
- Режим снижения нагрузки;
- Режим пуска;
- Режим выбега;
- Холостой ход;
- Режим валоповорота и т.п.
Для каждого из этих режимов на базе выборок эталонного периода строятся модели, используемые при онлайн моделировании.
Анализ изменения технического состояния и вызвавших его причин производится на базе значений наибольших разладок. Для соответствующих сигналов изучаются их зависимости от времени и от других сигналов с наибольшими значениями разладок.
Для автоматизации анализа возникающих проблем производится фиксация обнаруженных отклонений, принятых мер и результатов. Такого рода статистика позволяет создавать правила для выявления узлов и деталей, с которыми ожидаются в дальнейшем проблемы.
Простейший вариант таких правил реализуется с помощью матрицы дефектов. Для каждого дефекта отмечаются вызываемые им разладки (в матрице дефектов для строки разладки и столбца дефекта ставится вес - ненулевое число). Далее для наиболее значимых разладок суммируются веса с коэффициентами значимости ранга разладки. Наибольшие значения полученных баллов характеризуют степень возможности зарождения дефекта. На базе накапливаемой статистики уточняется матрица дефектов.
Например, в случае если объект мониторинга (10) представляет собой подвижной объект (автомобиль), то его блоки, предназначенные для накопления информации о техническом состоянии автомобиля (10) или его отдельных узлов, будут выступать в виде датчиков (11), с которых информация будет далее передаваться на контроллеры (12) для ее дальнейшей обработки. Информация может передаваться как по проводным, так и беспроводным каналам передачи информации.
Дополнительно могут использоваться экспертные модули, построенные на базе эмпирических и физических моделей, которые также важны для анализа состояния объекта (10). В частности, это модули регрессионного анализа, и модули, предназначенные для анализа конкретных параметров объекта (10), например оценка К.П.Д. компрессора, положения эпицентра теплового поля на выходе из газовой турбины, износа элемента и т.п.
Для параметров, имеющих предельные значения, например для СКЗ (среднеквадратичное значение) вибраций, регрессионный анализ позволяет оценить сроки достижения предельных значений. Регрессия рассчитывается с фильтрацией по режиму работы объекта контроля (10).
Падение К.П.Д. компрессора на 1,5…3% означает загрязнение компрессора. Экспертный модуль расчета по физической модели К.П.Д. и оценки срока его падения до заданного значения определяет сроки промывки компрессора.
Модуль контроля положения эпицентра теплового поля на выходе из газовой турбины позволяет сравнивать состояние турбины в различные моменты времени по неоднородности распределения температур на выхлопе.
Кроме основной онлайн модели объекта, создаются также частные эмпирические модели, отвечающие за отдельные подсистемы объекта мониторинга. Они используются как в режиме онлайн, так и в режиме офлайн.
Например, для контроля работы системы отопления в помещении формируется модель, которая анализирует показания нагревательного котла и количество единиц тепла, которое передается от него на отопительные элементы с последующим считыванием показателей нагрузки котла и износа теплоносителей.
Пример СПиУМ (100) также может применяться в системах управления умными домами. СПиУМ (100) в этом случае через центральный контроллер получает данные работы элементов управления умным домом и с помощью обработки и мониторинга за упомянутыми элементами определяет ее техническое состояние. С помощью вычисления вышеупомянутым способом разладок в работе отдельных узлов или устройств системы управления умным домом определяется их техническое состояние в настоящий момент времени, а также прогнозирование возможного наступления отказа в их работе, и определение критических параметров, которые могут привести к выходу из строя всей центральной системы управления.
Как было указано выше, в случае если СПиУМ (100) применяется для контроля подвижных объектов, например транспорта, модели могут быть созданы под контроль конкретного узла, например двигателя, или в целом для анализа технического состояния транспорта и прогнозирования выхода из строя тех или иных элементов.
На Фиг. 3 представлен пример интерфейса СПиУМ (100), которая позволяет в режиме онлайн обнаруживать малейшие отклонения в работе турбоагрегата заблаговременно до наступления критических ситуаций.
По полученным результатам создаются уведомления для эксплуатирующих турбоагрегат специалистов и для служб сервиса, а также регулярно формируются отчеты о техническом состоянии за требуемые периоды эксплуатации.
На Фиг. 4 представлен обобщенный вариант работы алгоритма прогнозирования при анализе дальнейшей работы объекта мониторинга (10). Цикл аналитической обработки начинается с получения текущих значений параметров состояния (301) объекта мониторинга (10). По первоначально полученным данным (301), характеризующим техническое состояние объекта мониторинга (10), вычисляются с помощью алгоритма моделирования значения невязок, критерия Т2 и разладки (302).
Далее выполняется проверка превышение критерием Т2 предельных значений (303). Если превышения не выявлено, то осуществляется переход на следующий временной шаг (на следующий цикл аналитической обработки), который итеративно начинается с этапа (301) и анализа новых данных, полученных от объекта мониторинга (10). Если же на шаге (303) выявляется превышение критерием Т2 предельно заданного уровня, то выполняется переход на этап, на котором выполняется ранжирование разладок (304).
Далее проводится регрессивный анализ тегов старших разладок (305), после чего оценивается критичность по срокам событий достижения предельных значений (306). Далее система оценивает сроки наступления критических событий (307), и если вероятность наступления такого события высокая, то выдается предупреждение о вероятности наступления критического события (308), в противном случае начинается следующий цикл аналитической обработки (301).
Передача необходимой информации, в частности, при получении сигналов при отклонении работы объекта контроля (10) может выполняться по общеизвестным проводным и беспроводным типам связи, например: ЛВС Ethernet типа (LAN сеть), Wi-Fi, GSM, WiMax или MMDS (Multichannel Multipoint Distribution System) и т.п.
Информация от системы верхнего уровня (18) СПиУМ (100) может передавать на различные удаленные компьютерные устройства, например АРМ, выполненные на базе компьютеров типа IBM PC, или мобильные устройства пользователей системы, например смартфоны, планшеты или ноутбуки, получающие данные от сервера верхнего уровня (180) с помощью сообщений электронной почты и/или SMS-сообщений и/или PUSH-уведомлений.
СПиУМ (100) также обеспечивает выполнение анализа технического состояния объекта (10) по запросу пользователя с помощью отправки сообщений на сервер, который инициируется посредством электронного устройства (смартфона, ноутбука) или с помощью настройки получения регулярных уведомлений за заданный промежуток времени (ежедневно, ежечасно, раз в неделю и т.д.) отчета о техническом состоянии объекта и предупреждении о выходе из строя тех или иных его элементов или объекта (10) в целом.
Контроль объекта мониторинга (10) может выполняться через стандартный веб-браузер и портал в сети Интернет, предназначенный для отображения параметров состояния объекта контроля (10). Также возможно оперативное контролирование объекта мониторинга (10) с помощью специального программного приложения, устанавливаемого на устройства пользователей.
Уведомление о наступлении критического состояния или необходимости проверки каких-либо элементов объекта мониторинга (10), которые в будущем могут привести к падению мощности работы объекта (10) или выхода его из строя, может направляться на устройства до тех пор, пока сервер (180) в ответ на рассылаемые уведомления не получит сообщение о том, что уведомление было просмотрено пользователем. Данная функция может быть реализована с помощью посылки электронных сообщений с заданным промежутком времени или с помощью специализированного приложения или веб-портала, которое в ответ на идентификацию пользователя, связанного с системой уведомления сервера верхнего уровня (180), анализирует статус получения упомянутым пользователем упомянутого уведомления. Статус может быть привязан к изменению состояния параметра уведомления на сервере, который может представлять собой запись в базе данных отметки о получении ответного сообщения от устройства пользователя.
Представленное описание заявленного изобретения раскрывает предпочтительные варианты исполнения заявленного решения и не должно трактоваться как ограничивающее иные, частные варианты реализации, не выходящие за рамки испрашиваемого объема правовой охраны, которые должны быть понятны для специалиста в данной области техники.
Список литературы
1. Кудрявый В.В. Системное разрушение системы // Первое отраслевое электронное СМИ RusCable.Ru, эд. № ФС77-28662. 08.03.2016.
2. Аракелян Э.К., Крохин Г.Д., Мухин B.C. Концепция «мягкого» регулирования и технического обслуживания энергоустановок ТЭС на основе интеллектуальной диагностики // Вестник Московского энергетического института. 2008. №1. С. 14-20.
3. Zavaljevski N., Gross K.С. Sensor fault detection in nuclear power plants using multivariate state estimation technique and support vector machines // Thirn Intern. Conf. of the Yugoslav nuclear society. Belgrade, Yugoslavia: Printed in USA by Argonne laboratory. 2000.
4. Gross. K.С. MSET. Advanced pattern recognition system for ultra-reliable online instrument surveillance // Argonne national laboratory. 2000.
5. MSET: An Early Warning System with Broad Industrial Application // Argonne national library.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА УДАЛЕННОГО МОНИТОРИНГА ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК | 2016 |
|
RU2626780C1 |
| СПОСОБ И СИСТЕМА УДАЛЁННОЙ ИДЕНТИФИКАЦИИ И ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ ЗАРОЖДАЮЩИХСЯ ДЕФЕКТОВ ОБЪЕКТОВ | 2018 |
|
RU2686257C1 |
| Способ и система удаленного мониторинга и прогнозирования состояния технологических объектов | 2020 |
|
RU2739727C1 |
| СПОСОБ КОНТРОЛЯ И ПРОГНОЗИРОВАНИЯ РАБОТЫ ГАЗОТУРБИННОЙ УСТАНОВКИ С ИСПОЛЬЗОВАНИЕМ МАТРИЦЫ ДЕФЕКТОВ | 2018 |
|
RU2703874C1 |
| СПОСОБ УДАЛЕННОГО МОНИТОРИНГА И ПРОГНОЗИРОВАНИЯ СОСТОЯНИЯ ОТДЕЛЬНЫХ АГРЕГАТОВ И СЛОЖНЫХ ТЕХНОЛОГИЧЕСКИХ КОМПЛЕКСОВ | 2017 |
|
RU2677429C2 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ПРОМЫШЛЕННОЙ БЕЗОПАСНОСТИ ОПАСНОГО ПРОИЗВОДСТВЕННОГО ОБЪЕКТА | 2019 |
|
RU2748282C1 |
| СПОСОБ И СИСТЕМА УЧЕТА ОСТАТОЧНОГО РЕСУРСА КОМПОНЕНТОВ ТУРБОАГРЕГАТА | 2017 |
|
RU2668852C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОЙ ПРЕДИКТИВНОЙ ДИАГНОСТИКИ ОБЪЕКТОВ | 2023 |
|
RU2822087C1 |
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЖАРОВЫХ ТРУБ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2020 |
|
RU2757532C1 |
| Способ и система мониторинга оборудования на основе совместного статистического и физического моделирования | 2021 |
|
RU2780968C1 |



Изобретение относится к мониторингу объектов контроля. В способе удаленного мониторинга и прогностики состояния технических объектов, получают данные от объекта контроля; формируют эталонную выборку показателей работы объекта; строят матрицы состояния из компонентов точек эталонной выборки; на основании MSET метода строят эмпирические модели прогностики состояния объекта; определяют компоненты невязок; формируют статистическую модель работы объекта за промежуток времени; определяют предельное значение для статистической модели; определяют разладки; анализируют поступающую информацию от объекта; определяют степень отклонения показателей параметров объекта за промежуток времени; ранжируют вычисленные разладки; модифицируют эталонную выборку; обновляют эмпирические модели; формируют сигнал об отклонении параметра объекта на основании обновленной модели и определяют состояние работы объекта. Обеспечивается прогнозирование отклонений в работе объекта контроля. 2 н. и 23 з.п. ф-лы, 4 ил.
1. Способ для удаленного мониторинга и прогностики состояния технических объектов, заключающийся в выполнении этапов, на которых:
- получают данные от объекта контроля, характеризующие показатели параметров работы упомянутого объекта;
- формируют на основании полученных параметров объекта эталонную выборку показателей работы объекта, состоящую из значений упомянутых показателей, представляющих собой точки выборки, причем упомянутая выборка соответствует временному промежутку непрерывной работы объекта контроля;
- осуществляют построение матрицы состояния из компонентов точек эталонной выборки, в которой компонентами являются значения упомянутых показателей работы объекта контроля;
- на основании MSET (Multivariate State Estimation Technique) метода с помощью упомянутой матрицы состояния осуществляют построение эмпирических моделей прогностики состояния объекта контроля, каждая из которых отображает наблюдаемую точку состояния объекта контроля в многомерном пространстве показателей работы объекта в точку, моделирующую состояние объекта;
- определяют по разности компонентов наблюдаемой точки и точки, моделирующей состояние объекта, компоненты невязок, на основании которых рассчитывают критерий Т2, который характеризует отклонение показателей технологических параметров объекта контроля от модели в наблюдаемой точке пространства, причем Т2 является квадратичной формой нормализованных невязок, коэффициентами которой являются элементы псевдообратной матрицы корреляционной матрицы для нормализованных невязок эталонной выборки;
- формируют статистическую модель работы объекта контроля за выбранный эталонный промежуток времени;
- определяют предельное значение критерия Т2 для упомянутой статистической модели;
- определяют разладки, отображающие степень влияния показателей работы объекта на упомянутое отклонение показателей технологических параметров объекта контроля, как разность критериев Т2 и квадратичных форм нормализованных невязок, с коэффициентами псевдообратной матрицы для матрицы, полученной из упомянутой корреляционной матрицы, в которой строка и столбец, соответствующие данному показателю работы объекта, заменены на нулевое значение;
- осуществляют анализ поступающей информации от объекта контроля с помощью полученного набора эмпирических моделей путем сравнения полученных показателей объекта контроля с параметрами модели в заданный промежуток времени;
- определяют с помощью упомянутого критерия Т2 степень отклонения поступающих показателей параметров объекта контроля за заданный промежуток времени от показателей эмпирических моделей и эталонной статистической модели, и выявляют разладки для таких показателей;
- выполняют ранжирование вычисленных разладок для выявления показателей, вносящих наибольший вклад в изменение технического состояния объекта контроля, причем упомянутые показатели определяются как показатели, выходящие за упомянутое предельное значение критерия Т2;
- модифицируют эталонную выборку с помощью ее пополнения точками за новый промежуток времени и фильтрацией точек, соответствующих режиму работы, описываемому моделью, и соответствующих новому техническому состоянию объекта контроля;
- обновляют на основании отфильтрованной выборки эмпирические модели;
и
- формируют сигнал, сообщающий об отклонении, по меньшей мере, одного параметра объекта контроля на основании обновленной модели;
- определяют состояние работы объекта контроля и/или по меньшей мере одного узла объекта.
2. Способ по п. 1, характеризующийся тем, что эмпирические модели представляют собой статистические и динамические модели.
3. Способ по п. 2, характеризующийся тем, что для каждого типа моделей устанавливается шаг дискретизации.
4. Способ по п. 3, характеризующийся тем, что каждая модель задается набором рассчитываемых по методу MSET матриц.
5. Способ по п. 1, характеризующийся тем, что при расчете критерия Т2 компоненты невязок нормализуются по средним значениям невязок и их среднеквадратичным отклонениям для эталонной выборки.
6. Способ по п. 1, характеризующийся тем, что эмпирические модели создаются для множества различных режимов работы объекта контроля.
7. Способ по п. 6, характеризующийся тем, что при изменении режима работы объекта контроля выполняется автоматическое переключение соответствующей данному режиму эмпирической модели.
8. Способ по п. 1, характеризующийся тем, что на основании данных, характеризующих отклонения показателей работы объекта контроля, формируют матрицу дефектов.
9. Способ по п. 8, характеризующийся тем, что для каждого выявленного дефекта на основании матрицы дефектов определяют степень влияния на него разладок.
10. Способ по п. 9, характеризующийся тем, что степень влияния представляет собой весовой коэффициент, отображающий степень влияния разладки на дефект.
11. Способ по п. 10, характеризующийся тем, что при ранжировании разладок выполняют суммирование весовых коэффициентов.
12. Способ по п. 8, характеризующийся тем, что матрица дефектов обновляется по мере поступления данных технологических параметров объекта контроля.
13. Система прогностики и удаленного мониторинга (СПиУМ) состояния технических объектов, содержащая группу датчиков, связанных с объектом контроля и передающих информацию, о технологических параметрах упомянутого объекта, на первичные контроллеры, которые связаны с основным сервером АСУ ТП объекта контроля, предназначенным для накопления получаемых с контроллеров данных и последующей передачи упомянутых данных в зону нижнего уровня СПиУМ, содержащей, по меньшей мере, сервер нижнего уровня СПиУМ, из которой посредством сети передачи данных, данные технологических параметров объекта контроля передаются в зону верхнего уровня СПиУМ, которая содержит сервер верхнего уровня, выполненный с возможностью выполнения способа для удаленного мониторинга и прогностики состояния технологических объектов по любому из пп. 1-12.
14. Система по п. 13, характеризующаяся тем, что передача данных от контроллеров в зону нижнего уровня СПиУМ осуществляется посредством ЛВС.
15. Система по п. 13, характеризующаяся тем, что зона нижнего уровня СПиУМ является демилитаризованной зоной, организованной с помощью сетевых экранов.
16. Система по п. 15, характеризующаяся тем, что прием и передача информации через зону нижнего уровня СПиУМ выполняется через упомянутые сетевые экраны.
17. Система по п. 13, характеризующаяся тем, что передача данных от основного сервера АСУ ТП в зону нижнего уровня СПиУМ осуществляется с помощью ОРС протокола (OLE for Process Control).
18. Система по п. 13, характеризующаяся тем, что сеть передачи данных представляет собой сеть Интернет.
19. Система по п. 18, характеризующаяся тем, что передача информации посредством сети Интернет осуществляется через защищенный канал передачи данных.
20. Система по п. 13, характеризующаяся тем, что сервер верхнего уровня выполнен с возможностью автоматического обновления эмпирических моделей, при поступлении данных от объекта контроля.
21. Система по п. 13, характеризующаяся тем, что сервер верхнего уровня выполнен с возможностью передачи информации о состоянии объекта контроля на удаленные устройства пользователей.
22. Система по п. 21, характеризующаяся тем, что передача данных на удаленные устройства пользователей осуществляется с помощью проводного и/или беспроводного типа связи.
23. Система по п. 22, характеризующаяся тем, что проводной тип связи представляет собой ЛВС Ethernet типа.
24. Система по п. 22, характеризующаяся тем, что беспроводной тип связи выбирается из группы: Wi-Fi, GSM, WiMax или MMDS (Multichannel Multipoint Distribution System).
25. Система по п. 22, характеризующаяся тем, что данные о состоянии объекта контроля передаются с помощью сообщений электронной почты, и/или SMS-сообщений, и/или PUSH-уведомлений на удаленные устройства пользователей.
| СПОСОБ И СИСТЕМА УДАЛЕННОГО МОНИТОРИНГА ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК | 2016 |
|
RU2626780C1 |
| US 8014880 B2, 06.09.2011 | |||
| US 2016160762 A1, 09.06.2016 | |||
| СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ ПАРАМЕТРОВ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2568291C1 |

