Изобретение относится к способу и к измерительной системе для измерения подвижного объекта, например боковой направляющей для отливок в металлургической литейной или прокатной установке. Кроме того, изобретение относится к такой литейной или прокатной установке.
Способ и системы для измерения объектов, например валков или боковых направляющих в металлургических литейных или прокатных установках, основанные на лазерах, по существу известны уровню техники, например, из заявки на изобретение США US 2005/0057743 А1 или корейской заявки на изобретение KR 10 2004 0045566.
Немецкая публикация DE 10 2011 078 623 А1 раскрывает способ и устройство для определения положения валка в прокатном стане. Раскрытое в ней измерительное устройство использует источник света для испускания пучка световых лучей в форме коллимированного пучка. Такой пучок нужен, чтобы при попадании луча света на зеркало на измеряемом валке освещать определенную область зеркала таким образом, что определенный отраженный луч света может попадать на принимающее устройство. Под принимающим устройством понимается двухмерный приемник, который предназначен для приема принимаемого светового пучка в разложенном двухмерном виде. Кроме того, предусмотрено вычислительное устройство, которое анализирует картину светового пучка, принятую принимающим устройством.
Задача, лежащая в основе изобретения, состоит в применении такого способа и такой измерительной системы для измерения подвижного объекта на боковых направляющих в рольганге в литейной или прокатной установке и получении необходимой информации на основании выработанного изображения.
Указанная задача в отношении способа решена способом, заявленным в пункте 1 формулы изобретения.
Источником света согласно изобретению предпочтительно является источник лазерного излучения, поскольку такой источник лазерного излучения уже сам по себе обладает существенным для изобретения качеством, заключающемся в испускании параллельных лучей света. В альтернативном случае необходимая параллельность лучей света может достигаться также при помощи соответствующей оптики, в частности, собирающей линзы.
Понятие "лучи света, на которые объект оказал влияние" подразумевает, что испускаемые источником света лучи прерываются объектом и либо поглощаются объектом, либо отклоняются им, либо отражаются на принимающее устройство. "Лучи света, на которые объект не оказал влияния", проходят от источника света к принимающему устройству без прерывания их объектом, возможно, после их отражения посредством другого устройства, отличного от объекта.
Под датчиками сенсорной панели, относящимися к испущенным лучам света, на которые объект оказал влияние, понимаются те датчики, которые либо не принимают никаких из испускаемых лучей света, так как лучи света поглощаются объектом или отклоняются им от принимающего устройства, либо принимают те из испускаемых лучей света, которые отражаются объектом.
Разрешение сенсорной панели определяется известными расстояниями между датчиками сенсорной панели.
Под объектом подразумевается боковая направляющая на транспортировочном участке, например, в рольганге для плоского слитка. Источник света должен быть установлен так, что лучи света проходят перпендикулярно направлению перемещения боковой направляющей, и боковая направляющая при ее перемещении входит в область пространства, разделенную световым пучком лучей света.
Способ согласно изобретению обеспечивает преимущество, состоящее в том, что возможно получение всех желаемых сведений об измерении объекта простым образом путем анализа изображения. Анализ изображения может производиться предпочтительно полностью автоматически или полуавтоматически, что предпочтительным образом существенно упрощает применение способа для пользователя, а также значительно сокращает время, необходимое для получения желаемых сведений.
Согласно первому варианту осуществления расстояния между положениями датчиков на сенсорной панели совсем не обязательно должны быть равными. Важно только то, что расстояния вообще должны быть по существу известны, так как знание этих расстояний требуется для описанного ниже расчета различных сведений.
Возможно отображение изображения с положениями датчиков сенсорной панели на устройстве отображения для пользователя.
Для определения фактической глубины проникновения объекта в область пространства, охватываемую световым пучком лучей света, изображение анализируют таким образом, что суммируют известные расстояния между всеми теми датчиками, которые соответствуют испущенным лучам света, на которые объект оказал влияние, на изображении в направлении перемещения объекта.
После этого можно сравнивать определенную (найденную) таким образом фактическую глубину проникновения с заданной необходимой глубиной проникновения. Если фактическая глубина проникновения отличается от необходимой глубины проникновения, возможна корректировка конечного положения объекта, производимая предпочтительно автоматически, до совпадения фактического значения с необходимым. Предпочтительно возможно также формирование сообщения об ошибке и его отображение на устройстве отображения, когда фактическая глубина проникновения отличается от необходимой.
Согласно следующему предпочтительному варианту осуществления способа возможно индивидуальное определение фактической глубины проникновения для различных областей объекта путем анализа изображения сенсорной панели. Затем возможно сравнение этих индивидуальных фактических значений глубины проникновения с индивидуальными необходимыми значениями глубины проникновения для различных областей объекта. Если при этом для отдельных областей объекта индивидуальная фактическая глубина проникновения совпадает с индивидуальной необходимой глубиной проникновения, в то время как для других областей объекта это не выполняется, то исходя из этого обстоятельства можно сделать вывод о частичном износе указанных других областей объекта. Тогда степень износа выражается величиной разности между индивидуальной фактической глубиной проникновения и индивидуальной необходимой глубиной проникновения других областей объекта.
Найденная разность между необходимой глубиной проникновения и фактической глубиной проникновения по отношению ко всему объекту, или степень износа других областей объекта может быть занесена в память как величина смещения. В этом случае возможен автоматический учет значения величины смещения при последующих изменениях положения объекта и, таким образом, имеется возможность сразу точно позиционировать объект.
Способ согласно изобретению может предусматривать отклонение лучей света, испускаемых источником света, если они не прерываются объектом, с помощью рефлектора, прежде чем они попадут на принимающее устройство.
Задача изобретения решена, кроме того, измерительной системой по п. 11, а также литейной или прокатной установкой по п. 17 с измерительной системой согласно изобретению. Преимущества этой измерительной системы и заявленной литейной или прокатной установки соответствуют преимуществам, указанным выше со ссылкой на заявленный способ. Дальнейшие предпочтительные варианты осуществления способа и измерительной системы являются предметом зависимых пунктов.
К описанию прилагаются шесть фигур, на которых показаны:
фигура 1 - вариант осуществления для применения способа согласно изобретению и измерительной системы согласно изобретению в прокатном стане;
фигура 2 - изображение датчиков сенсорной панели без воздействия объекта;;
фигура 3 - изображение датчиков сенсорной панели с воздействием объекта;
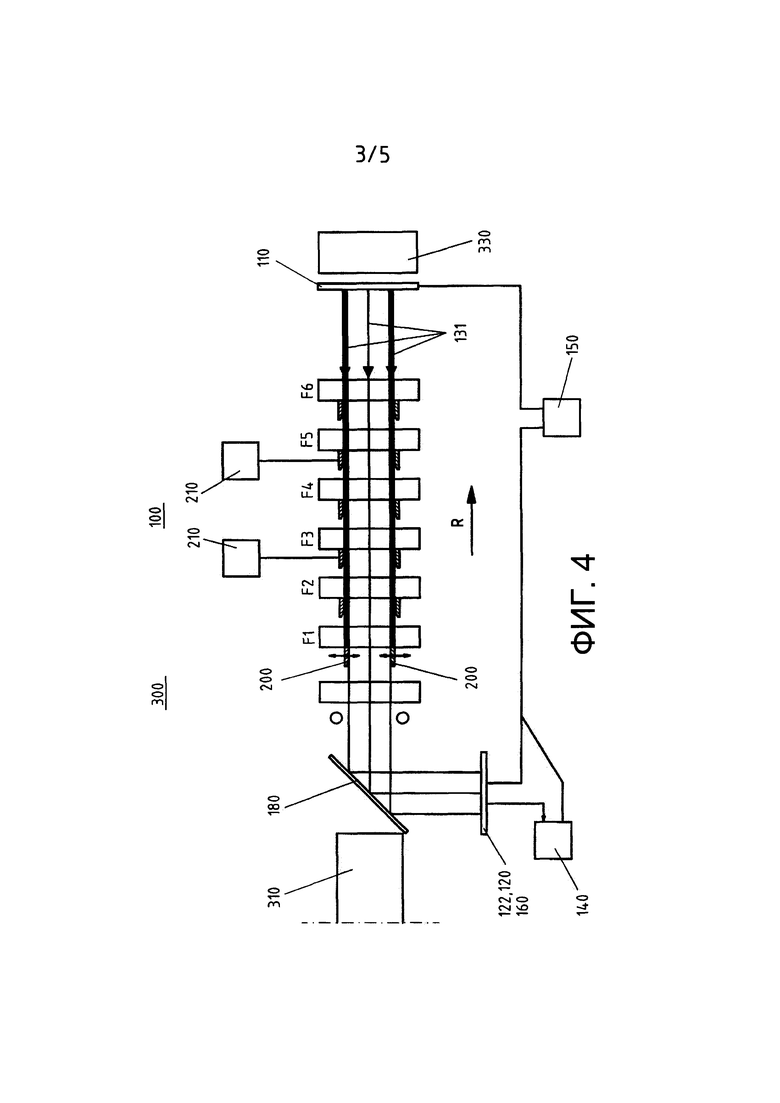
фигура 4 - прокатная установка с измерительной системой согласно изобретению, причем лучи света отклоняются на принимающее устройство при помощи отражающего устройства;
фигура 5 - альтернативный вариант осуществления для применения способа согласно изобретению и измерительной системы согласно изобретению в прокатном стане; и
фигура 6 - еще один альтернативный вариант осуществления для применения способа согласно изобретению и измерительной системы согласно изобретению в прокатном стане.
Ниже изобретение в форме варианта осуществления подробно описывается со ссылкой на указанные фигуры 1-6. На всех фигурах одинаковые технические элементы указаны с одинаковыми обозначениями.
На фигуре 1 показана прокатная установка для прокатки отливки или, соответственно, составной отливки в форме плоского слитка (не показана). Перед прокаткой отливку сначала нагревают в печи 310 до необходимой температуры прокатки. В некоторых случаях ее после этого с помощью ножниц 320 разрезают до желаемой длины, которую обычно выбирают с учетом заданной длины связки, требуемой впоследствии. Затем отливку прокатывают начисто с помощью чистовых клетей F1-F6 в полосу металла желаемой толщины. Наконец, полосу металла сматывают в рулон на намоточном устройстве 330.
Согласно фигуре 1 измерительная система 100 согласно изобретению встроена в указанную прокатную установку 300. А именно, перед намоточным устройством 330 предусмотрен по меньшей мере один источник 110 света для испускания параллельных лучей света в направлении принимающего устройства 120, противоположном направлению R транспортировки отливки. Под источником света может подразумеваться отдельный источник света, луч которого при помощи оптических вспомогательных средств, например линзы, расширяют в пучок предпочтительно дискретных параллельных лучей света. В альтернативном случае источник света может также состоять из множества отдельных источников, например, каждый отдельный луч света вырабатывается индивидуальным источником света. Предпочтительно источником света является источник лазерного излучения, который испускает уже изначально параллельные лучи света.
Принимающее устройство 120 на фигуре 1 в качестве примера расположено после печи 310. Принимающее устройство 120 содержит сенсорную панель с множеством датчиков, причем датчики служат для приема по меньшей мере части лучей света, испускаемых источником света.
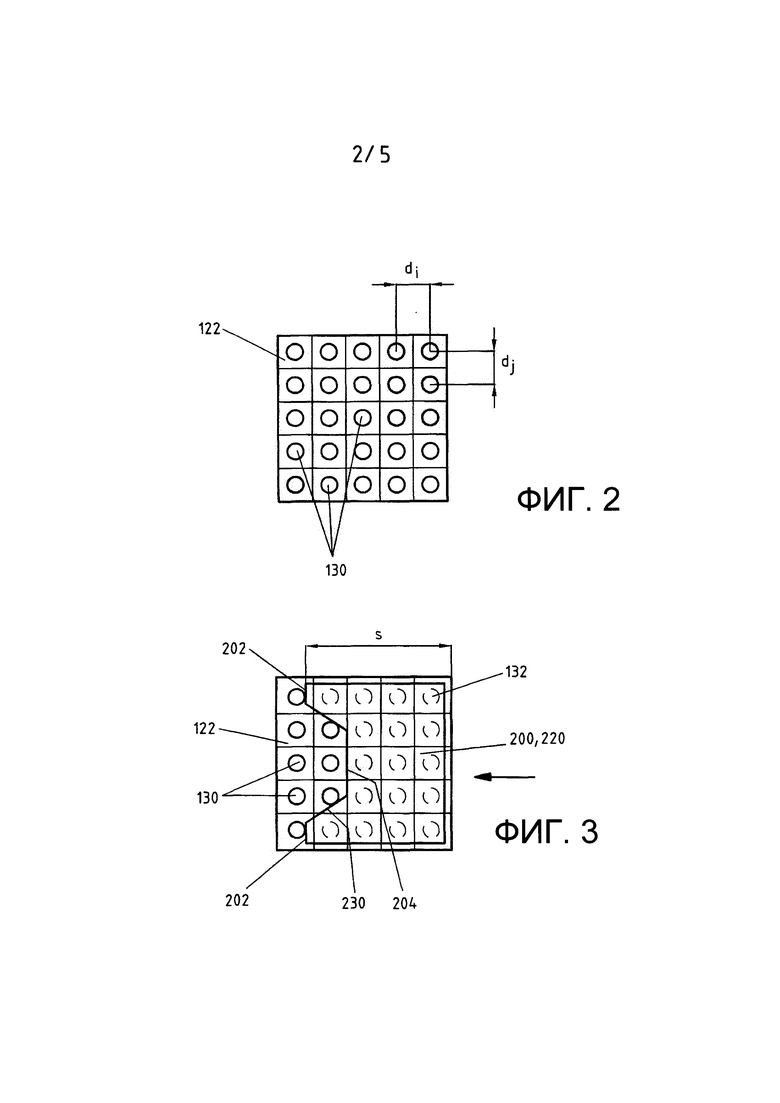
На фигурах 2 и 3 показаны примеры изображений 122 таких сенсорных панелей. Расстояния между отдельными датчиками 130 сенсорной панели в качестве примеров обозначены символами di, dj. Эти расстояния между датчиками на изображении могут быть равными по размеру, однако это не обязательно. Важно же то, что соответствующие расстояния di, dj известны.
Возможна визуализация изображения 122 для пользователя на устройстве 160 отображения.
Согласно изобретению принимающему устройству соответствует вычислительное устройство 140 для получения изображения 122 в отношении, например, глубины s проникновения объекта в область пространства, охватываемую световым пучком лучей света, скорости объекта и/или его контура.
Передача данных изображения на устройство 160 отображения может производиться посредством кабеля или беспроводным способом. Все электронные устройства измерительной системы 100, в частности, источник 110 света, принимающее устройство 120 и вычислительное устройство 140, могут снабжаться электроэнергией с помощью собственного источника электрической энергии измерительной системы - например, батареи или аккумулятора.
Изображения, показанные на фигурах 2 и 3, выполнены двухмерными. По существу они могут быть также выполнены лишь в одном измерении, причем в этом случае предусмотрена только одна линия точечных датчиков, например, горизонтальная или вертикальная.
На фигуре 1 лучи 130 света, испускаемые источником 110 света, излучаются непосредственно на принимающее устройство 120 и принимаются им. Существует также альтернативная возможность излучать свет сначала на отражающее устройство 180, которое расположено в направлении распространения света за измеряемым объектом 200, для отклонения лучей света на принимающее устройство 120; см. фиг. 4.
На фигуре 5 показан другой альтернативный вариант осуществления измерительной системы для ее встраивания в прокатную установку. Конкретно, здесь источник 110 света и принимающее устройство 120 предпочтительно образуют единый конструктивный блок; в частности, они помещены как бы в одном и том же месте, в данном примере - перед намоточным устройством при рассмотрении в направлении R транспортировки плоского слитка. На другом конце области, наблюдаемой измерительной системой, в данном случае за печью 310, расположено отражающее устройство 180 для отражения испускаемых источником 110 света лучей назад, на принимающее устройство 120, если лучи света не прерываются объектом, например, боковой направляющей. Кроме того, принимающее устройство 120 служит также для приема лучей света, отраженных боковой направляющей при ее наличии, как описывается ниже. При этом варианте осуществления принимающему устройству 120 также поставлены в соответствие устройство 160 отображения для изображения 122 сенсорной панели, вычислительное устройство 140 и источник энергии 150.
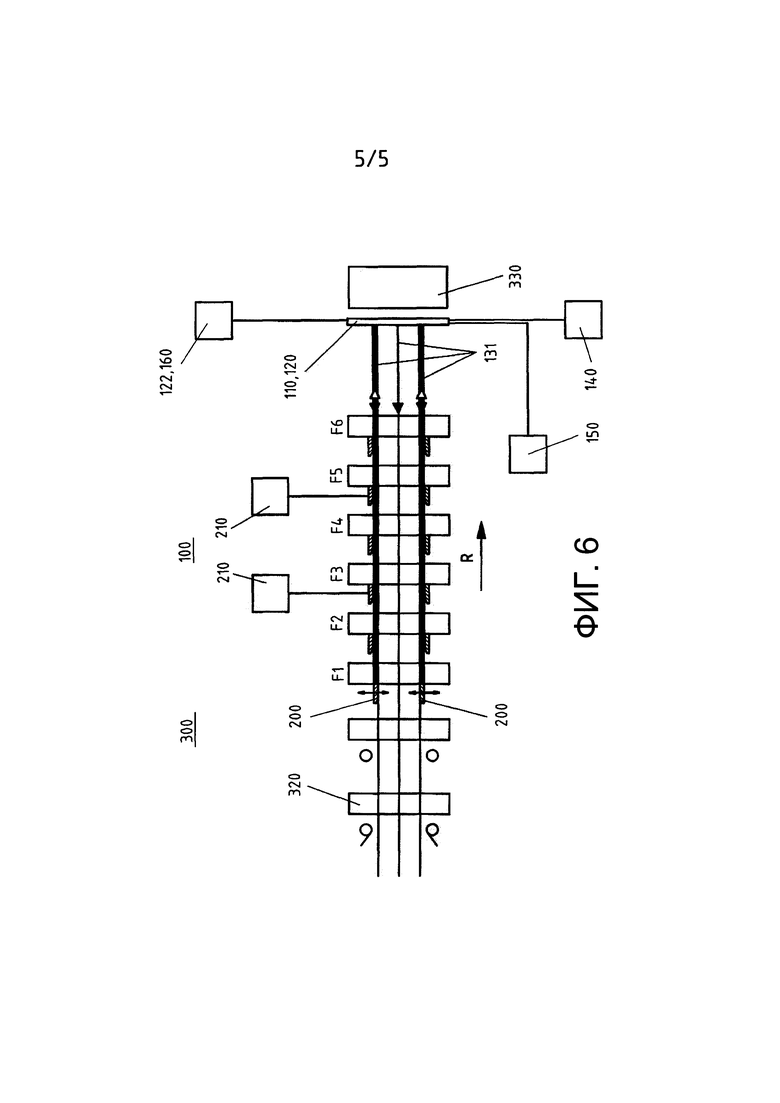
На фигуре 6 показан еще один альтернативный вариант осуществления измерительной системы, встраиваемой в прокатную установку. Вариант осуществления по фиг. 6 отличается от варианта осуществления по фиг. 5 только тем, что отражающее устройство 180 полностью исключено. Вследствие этого те испускаемые источником 110 света лучи, на которые измеряемый объект 200 не оказывает влияния, не отражаются снова на принимающее устройство 120, которое в варианте осуществления согласно фиг. 6 предполагается в том же месте, что и источник 110 света, и не принимаются этим устройством. Таким образом, принимающее устройство 120, или, соответственно, сенсорная панель принимает лишь ту часть испускаемых источником 110 света лучей, на которую объект 200 оказывает влияние или, соответственно, отражается им. В остальном утверждения, приведенные для варианта осуществления согласно фиг. 5, аналогичным образом относятся к варианту осуществления по фиг. 6.
Описанную измерительную систему 100 перед ее использованием устанавливают в литейную или прокатную установку и там калибруют. Калибровка в этом контексте означает сначала тонкую настройку или, соответственно, точное позиционирование источника света, принимающего устройства, а также отражающего устройства при его наличии, посредством соответствующих регулирующих элементов таким образом, что они оптимальным образом ориентированы друг относительно друга и могут взаимодействовать друг с другом.
После монтажа измерительной системы 100 в установку 300 и после калибровки измерительной системы она готова для осуществления способа согласно изобретению измерения подвижного объекта, например - согласно фигуре 1 - подвижной боковой направляющей 200 на краю транспортировочного участка для отливки. После этого способ предусматривает следующую последовательность операций:
Источник 110 света активируют для испускания параллельных лучей 130 света. Затем боковую направляющую 200 вводят поперек направления распространения лучей 130 света в область пространства, охватываемую лучами света (направление стрелки на фигуре 3), так что по меньшей мере некоторые из испускаемых лучей света на их пути к принимающему устройству 120 прерываются боковой направляющей 200. В зависимости от формы поверхности боковой направляющей падающие туда лучи света поглощаются или отклоняются в сторону от принимающего устройства. Тогда принимающее устройство не принимает те лучи света, на которые влияет боковая направляющая; этот случай представлен на фиг. 1. В альтернативном варианте лучи света, в случае соответствующей поверхности боковой направляющей, могут отражаться от нее также к принимающему устройству и приниматься принимающим устройством; этот случай представлен на фиг. 5.
В обоих случаях принимающее устройство 120 вырабатывает изображение 122, представляющее, с одной стороны, положения тех датчиков сенсорной панели, которые принимают испущенные и не подвергавшиеся воздействию боковой направляющей лучи света. Они показаны на фигуре 3 в виде датчиков 130. С другой стороны, на изображении 122 представляются также положения 132 тех датчиков сенсорной панели, которые относятся к испущенным, но подвергшимся воздействию объекта 200 или, соответственно, боковых направляющих лучам света. Эти датчики в положениях 132 либо не принимают никаких из испускаемых лучей света, так как лучи света поглощены, например, поверхностью боковой направляющей или отклонены ею в сторону от принимающего устройства, либо они принимают те лучи света, которые отражены от боковой направляющей на принимающее устройство. Положения 130 датчиков, которые принимают лучи света без помехи со стороны боковой направляющей, и положения датчиков, которые либо не принимают испускаемые лучи света, либо принимают их после отражения от боковой направляющей, на изображении 122 наглядно различаются, как показано на фиг. 3. В качестве альтернативы или дополнения к отдельным положениям датчиков возможно также представление на изображении (только) тени 220 или контура боковых направляющих, как это также показано на фигуре 3. Контур боковой направляющей представляется в виде линии границы, проходящей между обоими положениями 130 и 132.
В последующем изображение 122, созданное таким образом, анализируют посредством вычислительным устройством 140 согласно изобретению в отношении различных аспектов.
С одной стороны, вычислительное устройство 140 предназначено для определения изображения в отношении фактической глубины s проникновения объекта 200 или, соответственно, боковых направляющих в область пространства, охватываемую световым пучком лучей света. А именно, определение происходит посредством суммирования в этом изображении известных расстояний di, dj в направлении перемещения боковых направляющих для всех испущенных, но не принятых лучей света. Это направление перемещения обозначено на фигуре 3 показанной там стрелкой влево. Точность или, соответственно, разрешение, с которым возможно определение глубины s проникновения, зависит от плотности расположения датчиков или, соответственно, от расстояний между ними на сенсорной панели или, соответственно, на изображении 122. На фигурах 2 и 3 показана очень невысокая плотность расположения датчиков, чтобы не ухудшать наглядность изображения; на практике возможен выбор очень незначительных расстояний di, dj, например, в микронном или миллиметровом диапазоне, и в соответствии с этим возможен расчет искомой глубины s проникновения с высокой точностью или, соответственно, с высоким разрешением.
Под глубиной s проникновения, определяемой посредством анализа изображения 122, понимается так называемая фактическая глубина s проникновения. Способ согласно изобретению может предусматривать сравнение этой фактической глубины проникновения с заданной необходимой глубиной проникновения, причем эта необходимая глубина проникновения представляет собой необходимое положение для объекта 200 или, соответственно, боковой направляющей, например, в литейной или прокатной установке. Зафиксированное отклонение фактической глубины проникновения от необходимой как правило означает, что приведение в необходимое положение производится неправильно, и в соответствии с этим необходимо заново позиционировать или, соответственно, калибровать исполнительный орган 210, который используется для позиционирования боковых направляющих 200. В рамках калибровки, которая производится предпочтительно также автоматически, исполнительный орган 210 устанавливают таким образом, что объект снова достигает его заданное необходимое положение, т.е. настройку исполнительного органа производят до тех пор, пока фактическое положение не совпадет с необходимым положением. Возможно также закладывание первоначально зафиксированного отклонения фактической глубины проникновения от необходимой в качестве значения смещения в систему управления для исполнительного органа, так что оно может регулярно учитываться также для последующих случаев активирования исполнительного органа. Значение смещения может служить также для формирования сообщения об ошибке, которое может показываться, например, на устройстве 160 отображения.
Возможно индивидуальное или, соответственно, раздельное определение фактической глубины проникновения для различных областей 202, 204 объекта, см. фиг. 3, в процессе соответствующего анализа изображения 122 с помощью вычислительного устройства 140. Конкретно, возможно определение индивидуальных фактических значений глубины проникновения для различных областей 202, 204 и их сравнение с соответствующими индивидуальными необходимыми значениями глубины проникновения для различных областей. Если при этом устанавливают, что для отдельных областей объекта, например, для области 202 на фигуре 3, индивидуальная фактическая глубина проникновения совпадает с индивидуальной необходимой глубиной проникновения, но, с другой стороны, одновременно обнаруживают, что для области 204 индивидуально определенная для этой области фактическая глубина проникновения не совпадает с индивидуальной необходимой глубиной проникновения, то это позволяет сделать вывод о частичном износе области 204 объекта. Степень износа при этом соответствует разности между индивидуальной фактической глубиной проникновения и индивидуальной необходимой глубиной проникновения в этой области 204. Область 204 при варианте осуществления, показанном на фигуре 3, при котором под объектом 200 понимается боковая направляющая на транспортировочном участке для отливки, обычно непосредственно соприкасается с отливкой; этим обусловлен износ. Области 202, напротив, обычно не подвержены износу, так как они не находятся в контакте с отливкой. При описанном примере исполнительный орган 140 тогда регулируют таким образом, что разность между фактической глубиной проникновения и необходимой глубиной проникновения в области 204 объекта 200 становится равна нулю, поскольку, как уже сказано, эта область релевантна для фактического направления отливки. В отличие от этого, отклонение фактической глубины проникновения от необходимой для областей 202 боковой направляющей в этом случае считают приемлемым, так как это отклонение несущественно для поставленной цели, а именно для точного направления отливки.
Определение разности между необходимой глубиной проникновения и фактической глубиной проникновения по отношению ко всему объекту или к степени износа определенной подобласти объекта возможно, как описано, посредством анализа изображения. После этого разность или, соответственно, степень износа предпочтительно закладывают в систему управления исполнительным органом в качестве значения смещения, чтобы иметь возможность впредь автоматически учитывать ее при новых процессах позиционирования, предпочтительно автоматических.
Независимо от возможности определения фактической глубины проникновения, анализ изображения 122 посредством вычислительного устройства 140 обеспечивает также возможность определения скорости, с которой объект или, соответственно, боковая направляющая 200 проникает в область пространства, охватываемую лучами света. Для этого определяют длину пути, проходимого объектом 200 при его вхождении в указанную область пространства, измеренную посредством суммирования известных расстояний в направлении перемещения объекта между всеми теми датчиками в сенсорной панели, которые соответствуют лучам света, на которые объект оказал и/или не оказал влияния, за определенный промежуток времени. После этого для определения скорости измеренную длину пути делят на измеренный интервал времени. Под длиной пути может подразумеваться полная глубина проникновения или ее часть.
Кроме того, анализ изображения делает возможным также определение контура объекта, который проникает в область пространства, охватываемую лучами света. Контур 230 соответствует линии границы, проходящей между положениями 130 датчиков, которые принимают лучи света, на которые объект оказал влияния, и положениями 132 датчиков, которые соответствуют лучам света, на которые объект оказал влияние, как это видно из фигуры 3.
Перечень условных обозначений
100 измерительная система
110 источник света
120 принимающее устройство
122 изображение сенсорной панели
130 датчик
131 луч света
132 положение не принятого луча света или принятых отраженных лучей света
140 вычислительное устройство
150 источник энергии
160 устройство отображения
180 отражающее устройство
200 подвижный объект, например, боковая направляющая
202 область объекта, не подвергавшегося износу
204 область объекта, подвергшегося износу
210 исполнительный орган
220 тень/силуэт боковой направляющей
230 контур
300 прокатная установка
310 печь
320 ножницы
330 намоточное устройство
di расстояние
dj расстояние
s глубина проникновения
R направление транспортировки отливки
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С ВОЗМОЖНОСТЬЮ УПРАВЛЕНИЯ ФАРАМИ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2017 |
|
RU2680947C2 |
| ОПТИЧЕСКИЙ ОБМЕР КРЫШКИ | 2017 |
|
RU2754071C2 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И ИДЕНТИФИКАЦИИ ФОРМЫ И СТРУКТУРЫ ОБЪЕКТА | 2020 |
|
RU2750681C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗВЛЕЧЕНИЯ ФИЗИОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2653799C2 |
| МОБИЛЬНЫЙ РЕНТГЕНОВСКИЙ АППАРАТ | 2011 |
|
RU2626888C2 |
| ДИСПЛЕЙ С УМЕНЬШЕНИЕМ ДИСКОМФОРТА ЗРЕНИЯ | 2015 |
|
RU2709389C2 |
| АВТОСТЕРЕОСКОПИЧЕСКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ | 2010 |
|
RU2550762C2 |
| СИСТЕМЫ СЧИТЫВАНИЯ ПОЗИЦИИ ДЛЯ ИСПОЛЬЗОВАНИЯ В СЕНСОРНЫХ ЭКРАНАХ И ПРИЗМАТИЧЕСКАЯ ПЛЕНКА, ИСПОЛЬЗУЕМАЯ В НИХ | 2010 |
|
RU2573763C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МАТЕРИАЛА ИССЛЕДУЕМОГО ОБЪЕКТА И СПОСОБ ДОСМОТРА ОБЪЕКТА | 2008 |
|
RU2476863C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ УЛЬТРАЗВУКОВАЯ СИСТЕМА | 2018 |
|
RU2759235C2 |


Изобретение относится к способу и к измерительной системе для измерения смещения боковой направляющей (200) транспортировочного участка установки для изготовления отливки литьем или прокаткой в металлургической установке. Система содержит по меньшей мере один источник (110) света, испускающий параллельные лучи (130) света, и принимающее устройство (120) с сенсорной панелью для приема лучей света. Вычислительное устройство служит для анализа лучей света, принятых сенсорной панелью. Для обеспечения возможности более простого и быстрого анализа данных принимающее устройство выполнено с возможностью выработки изображения сенсорной панели с положениями датчиков сенсорной панели, которые соответствуют лучам света, на которые не оказал влияние объект, и с положениями датчиков сенсорной панели, соответствующих испущенным лучам света, на которые оказал влияние введенный объект. Вычислительное устройство выполнено с возможностью анализа изображения в отношении глубины проникновения объекта в область пространства, охватываемую лучами света, скорости и/или контура объекта . 3 н. и 14 з.п. ф-лы, 6 ил.
1. Способ измерения смещения боковой направляющей (200) транспортировочного участка установки для изготовления отливки литьем или прокаткой, включающий следующие операции:
- активизацию по меньшей мере одного источника (110) света для испускания параллельных лучей (131) света, которые охватывают область пространства так, что боковая направляющая (200) оказывает влияние на отдельные из испускаемых лучей света на их пути к принимающему устройству (120) при перемещении боковой направляющей (200) в указанную область пространства,
- прием лучей света, на которые боковая направляющая (200) оказала и/или не оказала влияния, при помощи сенсорной панели принимающего устройства (120), причем известна разрешающая способность сенсорной панели по меньшей мере в одном направлении пространства, поперечном относительно направления лучей света, и
- выработку изображения (122) сенсорной панели с положениями тех датчиков (130) сенсорной панели, которые соответствуют лучам света, на которые боковая направляющая (200) не оказала влияния, и с положениями датчиков (132) сенсорной панели, которые соответствуют испущенным лучам света, на которые боковая направляющая (200) оказала влияние, причем расстояния (di, dj) между отдельными положениями датчиков (130) известны на основании известного разрешения сенсорной панели,
отличающийся тем, что
источник (110) света устанавливают таким образом, что лучи (130) света проходят перпендикулярно направлению перемещения боковой направляющей (200), причем изображение анализируют в отношении величины смещения боковой направляющей (200) в область пространства, охваченную лучами света.
2. Способ по п. 1, отличающийся тем, что расстояния (di, dj) между датчиками равны или не равны друг другу.
3. Способ по п. 1 или 2, отличающийся тем, что изображение (122) отображают для пользователя на устройстве (160) отображения.
4. Способ по одному из пп. 1-3, отличающийся тем, что анализ изображения (122) для определения фактической величины (s) смещения боковой направляющей (200) в область пространства, охватываемую световым пучком лучей света, производят путем суммирования известных расстояний между положениями всех тех датчиков (130) сенсорной панели, которые соответствуют испущенным лучам света, на которые боковая направляющая (200) оказала влияние, в направлении перемещения боковой направляющей (200) на изображении.
5. Способ по п. 4, отличающийся тем, что определенную фактическую величину (s) смещения сравнивают с заданной величиной смещения и, если фактическая величина смещения отличается от заданной величины смещения, предпочтительно вырабатывают и отображают на устройстве (160) отображения сообщение об ошибке.
6. Способ по п. 4 или 5, отличающийся тем, что посредством анализа изображения определяют значения фактической величины смещения индивидуально для различных областей боковой направляющей (200) и сравнивают их с соответствующими индивидуальными заданными величинами смещения для различных областей боковой направляющей (200), и если для одних областей боковой направляющей (200) индивидуальная фактическая величина смещения совпадает с индивидуальной заданной величиной смещения, а для других областей боковой направляющей (200) не совпадает, делают вывод о частичном износе указанных других областей боковой направляющей (200),
причем степень износа выражают посредством величины разности между индивидуальной фактической величиной смещения и индивидуальной заданной величиной смещения указанных других областей боковой направляющей (200).
7. Способ по п. 5 или 6, отличающийся тем, что определяют разность между заданной величиной смещения и фактической величиной смещения по отношению ко всей боковой направляющей (200) или степень износа указанных других областей боковой направляющей (200) и заносят ее в память в виде величины смещения для ее учета при последующих изменениях положения боковой направляющей (200).
8. Способ по одному из пп. 1-7, отличающийся тем, что он включает отклонение лучей света, испускаемых источником света, если они не прерываются боковой направляющей (200), на принимающее устройство.
9. Способ по п. 1, отличающийся тем, что он включает следующие операции для подготовки измерения боковой направляющей (200):
- помещение указанного по меньшей мере одного источника (110) света и принимающего устройства (120) с сенсорной панелью и с отражающим устройством (180) при его наличии на транспортировочный участок для плоского слитка, ориентацию указанного по меньшей мере одного источника света и сенсорной панели и отражающего устройства при его наличии так, что обеспечивают возможность приема сенсорной панелью лучей света от источника света, и расположение сенсорной панели в неподвижном положении относительно начальной позиции боковой направляющей (200) так, что боковая направляющая (200), по меньшей мере при достижении ее конечного положения, по меньшей мере частично находится в пределах области пространства, охватываемой лучами света.
10. Способ по одному из пп. 4-9, отличающийся тем, что если полученная фактическая величина смещения боковой направляющей (200) в транспортировочный участок меньше, чем заданная величина смещения, вырабатывают сообщение, которое предпочтительно содержит указание на по меньшей мере частичный износ боковой направляющей (200), и при достижении заданного граничного значения предпочтительно содержит рекомендацию по замене изношенной боковой направляющей (200), если перед этим была произведена калибровка.
11. Система (100) для измерения смещения боковой направляющей (200) транспортировочного участка установки для изготовления отливки литьем или прокаткой, содержащая:
по меньшей мере один источник (110) света для испускания параллельных лучей света, которые охватывают область пространства, в которую входит боковая направляющая при ее перемещении,
принимающее устройство (120) с сенсорной панелью для приема по меньшей мере части испускаемых лучей света, причем известно разрешение сенсорной панели по меньшей мере в одном направлении пространства, поперечном по отношению к направлению лучей света; и
вычислительное устройство (140) для анализа лучей света, принятых принимающим устройством (120), причем
принимающее устройство (120) выполнено с возможностью выработки изображения (122) сенсорной панели с положениями датчиков сенсорной панели, которые соответствуют лучам (130) света, на которые боковая направляющая (200) не оказала влияния, и с положениями датчиков сенсорной панели, соответствующих испущенным лучам света, на которые боковая направляющая (200) оказала влияние, причем на основе известного разрешения сенсорной панели также известны расстояния (di, dj) между отдельными положениями,
отличающаяся тем, что источник (110) света установлен таким образом, что обеспечено прохождение лучей (130) света перпендикулярно направлению перемещения боковой направляющей (200), при этом
- вычислительное устройство (140) выполнено с возможностью анализа изображения (122) в отношении величины (s) смещения боковой направляющей (200) в область пространства, охватываемую световым пучком лучей света.
12. Система (100) по п. 11, отличающаяся тем, что указанный по меньшей мере один источник (110) света предпочтительно выполнен в виде источника лазерного излучения для испускания светового пучка параллельных лучей света, имеющего одномерное или двухмерное поперечное сечение.
13. Система (100) по п. 11 или 12, отличающаяся тем, что она содержит собственный источник (150) электрической энергии, например батарею или аккумулятор.
14. Система (100) по одному из пп. 11-13, отличающаяся тем, что она содержит устройство (160) отображения, которое связано с принимающим устройством (120) и/или вычислительным устройством (140) посредством кабеля или радиосвязи для передачи данных, в частности для отображения изображения (122).
15. Система (100) по одному из пп. 11-14, отличающаяся тем, что она содержит отражающее устройство (180), которое расположено за боковой направляющей (200) в направлении распространения лучей (130) света, для отклонения лучей (130) света, на которые боковая направляющая не оказала влияния, на сенсорную панель принимающего устройства (120).
16. Система (100) по одному из пп. 11-15, отличающаяся тем, что источник (110) света, принимающее устройство (120) и отражающее устройство, при его наличии, выполнены с возможностью позиционирования предпочтительно с помощью регулирующих элементов для настройки их заданной взаимной ориентации.
17. Установка для изготовления отливки литьем или прокаткой, содержащая транспортировочный участок для отливки с боковыми направляющими (200) на краю транспортировочного участка для направления отливки, причем боковые направляющие (200) выполнены с возможностью их перемещения с помощью исполнительных органов (210) в направлении, поперечном к линии транспортировочного участка, внутрь указанного участка и наружу из него, отличающаяся тем, что она содержит измерительную систему по одному из пп. 11-16, а источник (110) света и принимающее устройство (120) и отражающее устройство, при его наличии, ориентированы таким образом, что обеспечено распространение испускаемых лучей (130) света перпендикулярно направлению перемещения боковых направляющих (200), а боковые направляющие (200) выполнены с возможностью их перемещения в поперечном направлении в область пространства, охватываемую лучами света.
| WO 2013037350 A2, 21.03.2013 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| СПОСОБ ПОЛУЧЕНИЯ СИЛАОКСААЦЕНАФТЕНОВ | 0 |
|
SU298588A1 |
| WO 2004074769 A2, 02.09.2004 | |||
| Способ контроля осевой настройки прокатной клети и устройство для его осуществления | 1978 |
|
SU749474A1 |
| СПОСОБ ПРОКАТКИ МЕТАЛЛИЧЕСКОЙ ПОЛОСЫ С РЕГУЛИРОВАНИЕМ ЕЕ БОКОВОГО ПОЛОЖЕНИЯ И СООТВЕТСТВУЮЩИЙ ПРОКАТНЫЙ СТАН | 2008 |
|
RU2449846C2 |
| DE 3116278 A1, 11.11.1982. | |||

