Изобретение относится к тракторам, бульдозерам, экскаваторам, транспортерам, мобильным кранам и другим гусеничным самоходным транспортным или рабочим машинам с электромеханической трансмиссией, предназначенным для выполнения транспортных, землеройных, строительных, дорожных, сельскохозяйственных и других работ. Электромеханический тяговый модуль предназначен для привода металлической, или резино-металлической гусеничной ленты (гусеницы) самоходной машины.
Известна гусеничная машина с электромеханической трансмиссией, содержащая двигатель внутреннего сгорания (ДВС), силовой генератор, два тяговых электродвигателя, блок управления, размещенные в корпусе (раме) машины, а также бортовые редукторы и ходовую часть. Тяговые электродвигатели расположены на единой поперечной оси с бортовыми редукторами и ведущими колесами ходовой части и установлены в корпусе, либо в вырезах корпуса (рамы) с возможностью выступа наружу за ее габариты (US 6527072 B1, B62D 55/125, 04.03.2003; RU 92844 U1, B62D 25/16, 10.04.2010).
К недостаткам электромеханической трансмиссии этой машины относятся ограниченные функциональные возможности и пониженная безопасность ее работы, обусловленные отсутствием системы торможения. В этой трансмиссии отсутствуют как стояночные тормоза, так и тормозной резистор с устройством его управления, которые могли бы обеспечить поглощение энергии торможения машины в случае перевода тяговых электродвигателей в режим динамического торможения.
Еще одним недостатком этого технического решения является пониженный клиренс (дорожный просвет) машины. Обусловлено это тем, что оси бортовых редукторов, на которых закреплены ведущие колеса (звездочки), расположенные соосно с бортовыми редукторами, не могут быть подняты высоко над поверхностью грунта, поскольку это приводит к снижению длины опорной поверхности гусеничного движителя. Соответственно, нижние поверхности электродвигателей, полностью или частично размещенных в корпусе машины, определяют ее клиренс и ограничивают возможность его увеличения.
Известен также электромеханический тяговый модуль гусеничной машины, размещаемый внутри обвода ее гусеницы и содержащий тяговый электродвигатель и связанный с ним бортовой планетарный редуктор с закрепленной на нем ведущей звездочкой. В этом модуле предусмотрено воздушное охлаждение тягового электродвигателя с дополнительным отводом тепла на корпус (остов, раму) машины через конструктивные элементы с пониженным тепловым сопротивлением. С валом тягового электродвигателя со стороны, противоположной бортовому редуктору, соединен нормально замкнутый стояночный тормоз с электромагнитным управлением, размещенный в корпусе машины вне тягового модуля. (RU 2545249 C1, B62D 55/00, В60K 7/00, 27.03.2015).
Недостатком этого тягового модуля является невысокая тяговая мощность, что обусловлено более низкой эффективностью использованной системы охлаждения по сравнению с жидкостной. Другим его недостатком является пониженный клиренс машины из-за размещения стояночного тормоза в корпусе машины соосно с тяговым электродвигателем, ограничивающего возможность увеличения клиренса машины.
Наиболее близким к предложенному является электрический гусеничный ходовой механизм (электромеханический модуль), приспособленный для размещения преимущественно внутри гусеничного обвода. Он содержит тяговый электродвигатель, вал которого соединен с планетарным бортовым редуктор. Тяговый электродвигатель имеет замкнутый контур жидкостного охлаждения и размещен в воздухонепроницаемом и/или пыленепроницаемом уплотненном корпусе. Непосредственно на конце вала электродвигателя, со стороны, противоположной редуктору, размещен тормоз с электромагнитным управлением и датчик положения ротора для силового управляющего электронного устройства. Планетарный бортовой редуктор и соединенный с ним тяговый электродвигатель размещены с разных сторон ведущей звездочки. (RU 2489295 С2, B62D 55/00, В60K 7/00, 10.08.2013; US 9027677 В2, B62D 55/088, В60K 7/00, 12.05.2015).
Его недостатком является невысокая тяговая мощность. Это обусловлено применением тормоза с электромагнитным управлением, имеющего повышенные габаритные размеры и, соответственно, предопределяющего необходимость сокращения длины тягового электродвигателя, размещенного в ограниченном пространстве между тормозом и бортовым редуктором.
Кроме того, обмотка электромагнита тормоза потребляет достаточно большую мощность, необходимую для создания силы, удерживающей его пружины в сжатом состоянии. Причем тепло, выделяющееся в обмотке тормоза, передается на тяговый электродвигатель, к которому он прикреплен. Это приводит к дополнительному нагреву тягового электродвигателя, ухудшению теплового режима его работы и к соответствующему снижению тяговой мощности электромеханического модуля.
Из анализа аналогов и прототипа следует, что в предшествующем уровне техники не решена техническая проблема создания электромеханического тягового модуля гусеничной самоходной машины, имеющего высокую тяговую мощность и обеспечивающего повышенный клиренс (дорожный просвет) машины. Задачей изобретения является создание такого тягового модуля.
Техническим результатом, обеспечиваемым изобретением, является повышение тяговой мощности электромеханического тягового модуля гусеничной машины без уменьшения клиренса этой машины.
В электромеханическом тяговом модуле гусеничной машины, выполненном с возможностью его размещения на гусеничной машине без выступания за наружный край ее гусеницы и содержащем тяговый электродвигатель с жидкостным охлаждением, планетарный бортовой редуктор и тормоз, расположенные соосно по отношению к ведущей звездочке гусеницы и механически соединенные между собой, указанный технический результат достигается за счет того, что указанный тяговый модуль выполнен с возможностью его размещения с наружной стороны борта корпуса гусеничной машины или с частичным размещением этого модуля в корпусе гусеничной машины выше ее днища, а тормоз выполнен с гидравлическим или электрогидравлическим управлением.
В частных вариантах осуществления изобретения повышение тяговой мощности тягового модуля без увеличения клиренса машины достигается также за счет того, что:
- тяговый модуль имеет форму цилиндра, или составного цилиндра, или усеченного конуса, или комбинации по меньшей мере одного цилиндра и по меньшей мере одного усеченного конуса, причем наружная поверхность тягового модуля в области примыкания к борту корпуса гусеничной машины расположена не ниже ее днища;
- тормоз приспособлен для его использования в качестве стояночного тормоза, а тяговый электродвигатель и планетарный бортовой редукторы выполнены обратимыми с возможностью электродинамического торможения гусеничной машины при ее работе и/или перемещении на буксире;
- тормоз выполнен барабанным или нормально замкнутым многодисковым фрикционным с пружинами, сжимающими диски этого тормоза при отсутствии давления в контуре управления тормозом;
- тяговый модуль имеет объединенную систему смазки, и/или охлаждения, и/или фильтрации рабочей жидкости тягового электродвигателя, и/или планетарного бортового редуктора, и/или тормоза;
- тяговый электродвигатель выполнен бескорпусным или с тонкостенной оболочкой, а механическое соединение тягового модуля с гусеничной машиной осуществляется с помощью опорного стакана, прикрепленного к планетарному бортовому редуктору;
- вал тягового электродвигателя непосредственно или через передаточное устройство соединен с ведущим валом планетарного бортового редуктора, а тормоз размещен внутри тягового электродвигателя или расположен между тяговым электродвигателем и планетарным бортовым редуктором и соединен с валом тягового электродвигателя или с ведущим валом планетарного бортового редуктора;
- тяговый электродвигатель выполнен с двумя концами вала, первый из которых непосредственно или через передаточное устройство соединен с ведущим валом планетарного бортового редуктора, а противоположный конец вала соединен с тормозом;
- вал тягового электродвигателя непосредственно или через передаточное устройство соединен с ведущим валом планетарного бортового редуктора, а тормоз соединен с ведущим, или промежуточным, или ведомым валом планетарного бортового редуктора, причем тормоз и тяговый электродвигатель расположены с разных сторон планетарного бортового редуктора или по меньшей мере его одной ступени.
Отличительные признаки независимого и зависимых пунктов формулы изобретения, в том числе альтернативные, реализуемые в их любом сочетании, находятся в прямой причинно следственной связи с достижением одного и того же технического результаты, что можно пояснить следующим образом.
Минимально необходимыми составными частями тягового модуля являются тяговый электродвигатель, бортовой редуктор и тормоз. Этот модуль, с целью предотвращения его механических повреждений во время работы машины, не может выступать за наружный край гусеницы. Поэтому пространство, в котором он может быть расположен, определяется по существу шириной гусениц. Это исключает возможность размещения на гусеничной машине модулей с излишне длинными тяговыми электродвигателями и подсоединенными к ним бортовыми редукторами и тормозами.
Реализация отличительного признака независимого пункта формулы, согласно которому тяговый модуль размещается с наружной стороны борта корпуса гусеничной машины или с частичным размещением этого модуля в корпусе машины выше ее днища, позволят увеличить объем тягового модуля, в том числе его электродвигателя, без уменьшения клиренса машины. Поскольку крутящий момент тягового электродвигателя пропорционален длине активной зоны и квадрату радиуса его ротора, увеличение объема электродвигателя приводит к увеличению его крутящего момента и, при равной скорости вращения, к увеличению тяговой мощности, т.е. к достижению указанного технического результата.
Реализация отличительного признака независимого пункта формулы изобретения, согласно которому тормоз выполнен с гидравлическим или электрогидравлическим управлением, и, соответственно, имеет более короткую осевую длину по сравнению с тормозом с электромагнитным управлением, позволяет увеличить длину тягового электродвигателя за счет перераспределения общей ограниченной длины тягового модуля в пользу тягового электродвигателя. Благодаря этому достигается увеличение объема и, соответственно, тяговой мощности электродвигателя и модуля без уменьшения клиренса гусеничной машины.
Тормоз с гидравлическим или электрогидравлическим управлением не потребляет энергию как во включенном, так и в выключенном состоянии. Это обеспечивает улучшение теплового режима тягового электродвигателя и соответствующее увеличение тяговой мощности модули, поскольку исключение потока тепла от тормоза позволяет увеличить ток в обмотках тягового электродвигателя и его крутящий момент при сохранении максимально-допустимой температуры этих обмоток.
В частных вариантах реализации предложенного тягового модуля, согласно признакам первого зависимого пункта формулы, увеличение объема тягового электродвигателя, его тяговой мощности и соответствующее достижение указанного технического результата достигается благодаря максимально возможному использованию объема, в котором может быть размещен тяговый модуль, а именно, его реализации в форме цилиндра, составного цилиндра, или усеченного конуса, или комбинации по меньшей мере одного цилиндра и по меньшей мере одного усеченного конуса, с расположением наружной поверхности тягового модуля в области примыкания к борту корпуса гусеничной машины на уровне или выше ее днища.
Сокращение осевых размеров бортового редуктора может быть достигнуто за счет реализации планетарной передачи, а тягового электродвигателя - путем увеличения его диаметра, насколько это позволяет внутренний обвод гусеницы, а также за счет применения жидкостного охлаждения. Благодаря высокой теплоемкости охлаждающей жидкости достигается эффективное снижение температуры тягового электродвигателя, что позволяет повысить его тяговую мощность.
Реализация следующего отличительного признака зависимого пункта формулы изобретения, в соответствии с которым тормоз тягового модуля используется в качестве стояночного тормоза, а рабочее торможение гусеничной машины осуществляется путем перевода тягового электродвигателя в режим электродинамического торможения гусеничной машины, позволяет сократить объем, занимаемый тормозом, и, соответственно, перераспределить общий объем тягового модуля в пользу тягового электродвигателя. Благодаря этому, как указано выше, обеспечивается повышение крутящего момента электродвигателя и увеличение тяговой мощности модуля без уменьшения клиренса машины.
К этому же техническому результату приводит реализация тормоза барабанным, расположенным, например, вокруг тягового электродвигателя, или нормально замкнутым многодисковым фрикционным с пружинами, сжимающими диски этого тормоза при отсутствии давления в контуре управления. Тормоз такой конструкции имеет минимальный объем, что также обеспечивает возможность увеличения объема, занимаемого тяговым электродвигателем.
Реализация объединенной системы смазки, и/или охлаждения, и/или фильтрации рабочей жидкости тягового электродвигателя, и/или планетарного бортового редуктора, и/или тормоза, предусмотренная следующим отличительным признаком зависимого пункта формулы, позволяет сократить общий объем, занимаемый системой охлаждения, в частности, за счет сокращения подводящих и отводящих трубопроводов, а также улучшить охлаждение указанных составных частей тягового модуля. Это обеспечивает повышение тяговой мощности без уменьшения клиренса машины как за счет увеличения объема и крутящего момента тягового электродвигателя, так и улучшения его охлаждения.
При реализации следующего отличительного признака, характеризующегося применением бескорпусного тягового электродвигателя или имеющего тонкостенную оболочку, а также механическое соединение тягового модуля с гусеничной машиной с помощью опорного стакана, прикрепленного к планетарному бортовому редуктору, позволяет увеличить диаметр тягового электродвигателя, что приводит к увеличению его крутящего момента и тяговой мощности пропорционально квадрату этого диаметра, причем без уменьшения клиренса машины.
Установка опорного стакана позволяет исключить передачу нагрузки с гусеницы на статор тягового электродвигателя, что приводит к уменьшению деформации статора во время работы машины. Это обеспечивает возможность уменьшения зазора между статором и ротором тягового электродвигателя и соответствующего повышения его крутящего момента и тяговой мощности.
Согласно последним отличительным признакам зависимых пунктов формулы изобретения в тяговом модуле реализовано различное расположение тормоза, а также различные варианты его соединения с бортовым редуктором и тяговым электродвигателем. Тормоз может быть размещен внутри тягового электродвигателя, расположен между тяговым электродвигателем и бортовым редуктором, соединен со свободным концом вала тягового электродвигателя, противоположным от бортового редуктора, либо соединен с ведущим, промежуточным или ведомым валом бортового редуктора. Реализация этих признаков позволяет выбрать оптимальное расположение тормоза из условия сокращения осевой длины тягового модуля, занимаемого этим тормозом, с учетом требований к параметрам и конструкции тягового модуля. В частности, за счет совмещения функций отдельных конструктивных элементов тягового модуля. Например, в случае размещения тормоза внутри тягового электродвигателя подвижные фрикционные диски тормоза могут быть прикреплены непосредственно к ротору тягового электродвигателя. Это также приводит к перераспределению объема тягового модуля в пользу тягового электродвигателя и, соответственно, обеспечивает увеличение тяговой мощности модуля без уменьшения клиренса машины.
В предложенном тяговом модуле может быть одновременно реализовано несколько указанных альтернативных признаков независимого и зависимых пунктов формулы изобретения в их любом сочетании. Причем увеличение количества одновременно реализуемых признаков приводит к более существенному увеличению тяговой мощности модуля без уменьшения клиренса гусеничной машины.
Влияние отличительных признаков изобретения на указанный технический результат дополнительно показано далее в тексте при описании различных вариантов реализации предложенного устройства.
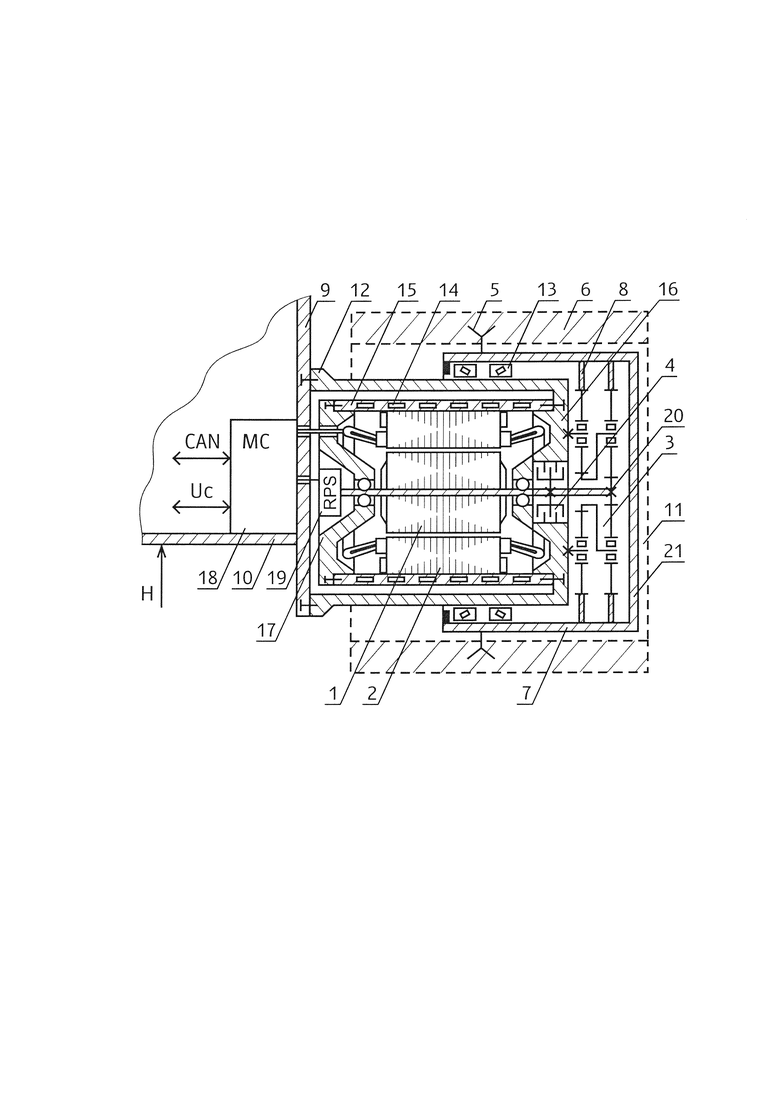
На чертеже представлена упрощенная схема одного борта гусеничной машины с установленным на нем электромеханическим тяговым модулем.
Он содержит тяговый электродвигатель с жидкостным охлаждением, активная часть которого состоит из ротора 1 и статора 2, планетарный бортовой редуктор 3 и тормоз 4 с гидравлическим или электрогидравлическим управлением, расположенные соосно по отношению к ведущей звездочке (ведущему колесу) 5, взаимодействующей с цевками гусеничной цепи (гусеничной ленты, гусеницы) 6.
Ведущая звездочка прикреплена выходному валу планетарного бортового редуктора 3, например, с помощью болтового соединения, или выполнена заодно с ним. В качестве этого вала может использоваться корпус 7 бортового редуктора, внутри которого размещена эпициклическая шестерня 8 последней ступени этого редуктора. Эта шестерня может быть также изготовлена вместе с корпусом 7, т.е. наружная поверхность эпициклического колеса планетарной передачи может служит в качестве наружной поверхности ее выходного вала.
Гусеничная машина может иметь рамный или полурамный остов, воспринимающий основные нагрузки и предназначенный для закрепления на нем основных узлов и агрегатов. Возможна также реализация безрамной конструкции остова. В этом случае узлы и агрегаты гусеничной машины закрепляются на несущем корпусе или кузове. Составными частями корпуса (кузова) машины являются ее левый и правый борт 9 и днище 10.
Электромеханический тяговый модуль имеет конструктивное исполнение и размеры, обеспечивающие возможность его установки с наружной стороны борта 9 корпуса гусеничной машины или с частичным размещением этого модуля в корпусе гусеничной машины выше ее днища 10.
Под размещением тягового модуля с наружной стороны борта корпуса в данном изобретении подразумевается его размещение с наружной стороны остова, рамы, полурамы, кузова или любого другого конструктивного элемента гусеничной машины, обращенного к гусенице.
Под частичным размещением этого модуля в корпусе гусеничной машины выше ее днища подразумевается частичное размещение тягового модуля не только в корпусе, но и в кузове, в открытом или закрытом пространстве за рамой, полурамой, остовом и т.д. Под днищем гусеничной машины подразумевается ее любой конструктивный элемент в зоне расположения тягового модуля, определяющий ее клиренс Н, показанный на чертеже.
Соответственно, признаки формулы изобретения считаются использованными при любой конструкции гусеничной машины и при любом присоединении (креплении) к ней тягового модуля, если он установлен на машине таким образом, что в горизонтальном направлении (по горизонтальной оси) он не выступает за наружный край 11 гусеницы 6 и не уменьшает клиренс (дорожный просвет) Н гусеничной машины, а в вертикальном направлении не выходит за пределы гусеничного обвода.
Тяговый модуль и его тяговый электродвигатель могут иметь цилиндрическую форму внешних поверхностей. В этом случае тяговой модуль непосредственно у борта корпуса машины может быть расположен ниже днища ее корпуса, как это показано на чертеже. Такое расположение не приводит к уменьшению клиренса (дорожного просвета) машины, под которым подразумевается расстояние между поверхностью дороги и самой нижней точкой центральной части машины.
Возможна также реализация тягового модуля, имеющего наружную поверхность в виде составного цилиндра, усеченного конуса или их комбинации. Например, ротор и статор тягового электродвигателя, а также опорный стакан 12, могут иметь коническую форму наружных поверхностей, а бортовой редуктор и тормоз - цилиндрическую. В этом случае сечение тягового модуля уменьшается по мере приближения к борту машины и часть модуля, расположенная выше днища машины, может быть расположена в ее корпусе.
Выбор формы осуществляется из условия максимального заполнения пространства, в котором возможно размещение тягового модуля, а также из условия, что наружная поверхность тягового модуля в области примыкания к борту корпуса гусеничной машины должна быть расположена не ниже ее днища.
Тяговый модуль может быть прикреплен к борту 9 корпуса (к стенке кузова, раме, полураме и т.п.) гусеничной машины различными способами (болтовое соединение, сварка) с использованием различных конструктивных элементов. Например, опорного стакана 12, на котором установлены роликовые подшипники 13 и уплотнение бортового редуктора.
Вал тягового электродвигателя непосредственно или через тормоз 3 связан с ведущим валом планетарного бортового редуктора. Это соединение может осуществляться через передаточное устройство, в частности, через зубчатую или эластичную муфту.
Охлаждение тягового электродвигателя осуществляется жидкостью, протекающей в каналах 14 его корпуса 15. Возможно также бескорпусное исполнение тягового электродвигателя и его исполнение с внешней оболочкой малой толщины. В этом случае корпус 15 отсутствует, а подшипниковые щиты 16, 17 соединены с нажимными кольцами магнитопровода статора, в котором выполнены каналы для охлаждающей жидкости. При этом тяговый электродвигатель, с целью обеспечения его жесткости и механической прочности, стянут шпильками, проходящими, например, через отверстия в магнитопроводе статора.
Охлаждающая жидкость с помощью циркуляционного насоса прокачивается по каналам 14 корпуса или магнитопровода статора и охлаждается во внешнем теплообменнике (на чертеже условно не показано).
Дополнительно может быть реализовано охлаждение тягового электродвигателя путем передачи выделяющегося в нем тепла через редуктор 3 на гусеницу 6 и через опорный стакан 12 на корпус (раму, полураму, кузов) гусеничной машины.
В отдельных случаях на валу тягового электродвигателя дополнительно может быть установлена крыльчатка вентилятора, обеспечивающего принудительную циркуляцию воздуха внутри тягового электродвигателя и улучшающего его охлаждение.
Тяговый электродвигатель может быть вентильным индукторным (вентильным реактивным, вентильным индукторно-реактивным) без постоянных магнитов и обмоток на роторе, именуемым в зарубежной технической литературе как «Switched Reluctance Motor» (SRM), а также синхронным с постоянными магнитами или асинхронным. Предпочтительно применение тягового электродвигателя без постоянных магнитов с классом нагревостойкости изоляции не ниже 180°С (класс Н по ГОСТ 8865-70 и IEC 62114).
Обмотки статора тягового электродвигателя соединены с контроллером тягового электродвигателя (МС) 18, на который поступает электрическое питание от силовой шины Uc, например с номинальным напряжением 275 VDC или 540 VDC и сигналы управления по шине CAN. На этот контроллер могут поступать также сигналы с различных датчиков, в том числе сигналы с датчиков положения ротора (RPS) 19 и температуры обмоток тягового электродвигателя.
Контроллер тягового электродвигателя 18 может именоваться также силовым коммутатором, инвертором, блоком управления, преобразователем электрической энергии, частотным преобразователем, электронной системой управления и т.п. В его состав входят микроконтроллер или цифровой сигнальный процессор с соответствующими интерфейсными схемами, в том числе реализующим обмен информацией по шине CAN между контроллером тягового электродвигателя и другими электронными устройствами гусеничной машины, а также силовые транзисторные ключи или модули, реализованные на основе биполярных транзисторов с изолированным затвором (анг. IGBT - Insulated-gate bipolar transistor) или полевых транзисторов с изолированным затвором (МОП - металл-окисел-полупроводник или МДП - металл-диэлектрик-полупроводник), а по англоязычной терминологии - MOS, MOSFET (Metal-Oxide-Semiconductor, Field-Effect-Transistors).
При практической реализации тягового модуля, с целью улучшения теплового режима и увеличения крутящего момента и мощности тягового электродвигателя, его диаметр выбирается максимально возможным, насколько это позволяют внутренние размеры гусеницы 6.
Торможение гусеничной машины в рабочем режиме возможно с помощью тяговых электродвигателей левого и правового борта, а тормоз 4 используется только в качестве стояночного тормоза и имеет минимальные размеры. В этом случае энергия торможения (кинетическая энергия) гусеничной машины с помощью контроллеров тяговых электродвигателей 18 передается на силовую шину Uc и далее с этой шины на тормозной резистор или в ДВС, если это предусмотрено конструкцией тягового генератора и ДВС.
Возможно также использование тормоза 4 в качестве рабочего тормоза.
Тормоз 4 может быть барабанным или, что более предпочтительно, многодисковым фрикционным с масляным охлаждением и дискретным или пропорциональным управлением. Он может быть нормально замкнутым с пружинами, сжимающими его диски при отсутствии давления в контуре управления тормозом.
Тормоз расположен внутри тягового модуля предпочтительно в той зоне, в которой его установка в наименьшей степени уменьшает объем, занимаемый тяговым электродвигателем. Он может быть размещен между тяговым электродвигателем и бортовым редуктором (показано на чертеже), размещен внутри тягового электродвигателя между его ротором и подшипниковым щитом, расположен на заднем подшипниковом щите и соединен со свободным концом вала тягового электродвигателя, противоположным от бортового редуктора, т.е. установлен вместе с датчиком положения ротора 19, либо соединен с ведущим, промежуточным или ведомым валом бортового редуктора.
Например, фрикционные диски тормоза могут быть связаны с солнечной шестерней 20 и наружной стенкой 21 корпуса 7 бортового редуктора. В этом случае тормоз не имеет неподвижных дисков. Это не препятствует работе тормоза, поскольку для создания тормозного момента важно наличие различных скоростей вращения дисков, а гидравлическое или электрогидравлическое управление тормозом обеспечивает возможность передачи усилия замыкания/размыкания тормоза на его движущиеся составные части.
Управление тормозом гидравлическое или электрогидравлическое. Давление в гидросистеме управления гусеничной машины, создаваемое, например насосом, механически соединенным с ДВС, с помощью клапана с пропорциональным или дискретным управлением подается в гидроцилиндр управления тормозом, расположенный внутри тягового модуля около этого тормоза. В результате этого поршень гидроцилиндра, связанный с подвижными фрикционными дисками тормоза, либо создает усилие сжатия дисков тормоза, обеспечивая создание момента торможения, пропорциональное величине давления в гидроцилиндре, либо преодолевает усилие пружины, встроенной в нормально замкнутый тормоз.
При реализации тормоза с гидравлическим управлением используется клапан с механическим приводом, например от педали тормоза, а при реализации тормоза с электрогидравлическим управлением - электромагнитный клапан, сигналы управления на который поступают от одного из контроллеров системы электрооборудования машины.
Если тормоз выполнен нормально замкнутым, то для обеспечения возможности буксировки машины с неработающим ДВС, либо давление управления тормозом должно создаваться независимо от работы ДВС, например с помощью насоса с электрическим приводом, либо солнечные шестерни 20 бортовых редукторов тяговых модулей левого и правого борта гусеничной машины должны быть съемными.
Системы смазки, охлаждения и фильтрации рабочей жидкости тягового электродвигателя, планетарного бортового редуктора и тормоза могут быть объединены. Например, тяговый электродвигатель может иметь охлаждение маслом, использующимся для смазки бортового редуктора и/или маслом, использующимся для управления тормозом. В этом случае может использоваться общий циркуляционный насос и общий фильтр этой рабочей жидкости. Возможно также использование охлаждающей жидкости ДВС для охлаждения тягового электродвигателя и общий масляный контур смазки бортового редуктора и управления тормозом.
Предложенный электромеханический тяговый модуль гусеничной машины работает следующим образом.
При работе машины механическая мощность ДВС при помощи генератора преобразуется в электрическую. Далее электрическая энергия по силовым шинам Uc подается на контроллеры двух тяговых электродвигателей 18 и далее на электродвигатели тяговых модулей левого и правого борта гусеничной машины, которые через понижающие редукторы 3 приводят во вращение ведущие колеса (звездочки) 5 и, соответственно, левые и правые гусеницы 6 машины, приводя ее в движение со скоростью, заданной операторам (машинистом). Информация о величине этой скорости поступает по шине CAN.
Торможение гусеничной машины осуществляется по сигналам ее оператора (машиниста) с помощью либо тяговых электродвигателей, либо тормозов 3.
Для осуществления поворота машины на контроллеры тяговых электродвигателей 18 по шине CAN подаются сигналы задания различных скоростей вращения левой и правой гусениц. Одновременно эти контроллеры обеспечивают регулирование тягового усилия каждой гусеницы, защиту тягового модуля от перегрева и аварийных режимов и т.д.
Для специалистов в данной области техники понятно, что кроме описанных вариантов электромеханического тягового модуля гусеничной машины возможны также иные варианты его реализации на основе признаков, изложенных в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГОВЫЙ МОДУЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2545249C1 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ (ВАРИАНТЫ) | 2019 |
|
RU2720694C1 |
| ПРОМЫШЛЕННЫЙ ТРАКТОРНЫЙ АГРЕГАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2014 |
|
RU2550867C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2643903C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ С ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2018 |
|
RU2688563C1 |
| РОБОТИЗИРОВАННАЯ ПЛАВАЮЩАЯ МАШИНА | 2018 |
|
RU2714551C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2547154C1 |
Изобретение относится к электромеханическим тяговым модулям. Электромеханический тяговый модуль содержит тяговый электродвигатель с жидкостным охлаждением, планетарный бортовой редуктор и тормоз с гидравлическим или электрогидравлическим управлением, расположенные соосно с ведущей звездочкой гусеницы. Тяговый модуль размещен с наружной стороны борта корпуса машины или с его частичным размещением в корпусе машины выше его днища. Его наружная поверхность, имеющая форму цилиндра, составного цилиндра, усеченного конуса или их сочетания, не выступает за наружный край гусеницы. Тормоз, выполненный барабанным или многодисковым фрикционным, может использоваться либо в качестве стояночного тормоза с реализацией рабочего торможения гусеничной машины тяговыми электродвигателями, либо в качестве рабочего тормоза. Системы смазки, охлаждения и/или фильтрации рабочей жидкости тягового электродвигателя, бортового редуктора и тормоза могут быть объединены. Тяговый электродвигатель может быть прикреплен к бортовому редуктору и выполнен бескорпусным или с тонкостенной оболочкой. Механическое болтовое или сварное присоединение тягового модуля к борту гусеничной машины осуществляется через опорный стакан, прикрепленный к бортовому редуктору. Тормоз может быть расположен между тяговым электродвигателем и бортовым редуктором, размещен внутри тягового электродвигателя, соединен со свободным концом его вала, противоположным от редуктора, либо соединен с ведущим, промежуточным или ведомым валом бортового редуктора. Достигается повышение тяговой мощности электромеханического тягового модуля гусеничной машины без уменьшения ее клиренса. 8 з.п. ф-лы, 1 ил.
1. Электромеханический тяговый модуль гусеничной машины, выполненный с возможностью его размещения на гусеничной машине без выступания за наружный край ее гусеницы и содержащий тяговый электродвигатель с жидкостным охлаждением, планетарный бортовой редуктор и тормоз, расположенные соосно по отношению к ведущей звездочке гусеницы и механически соединенные между собой, отличающийся тем, что он выполнен с возможностью его размещения с наружной стороны борта корпуса гусеничной машины или с частичным размещением этого модуля в корпусе гусеничной машины выше ее днища, а тормоз выполнен с гидравлическим или электрогидравлическим управлением.
2. Тяговый модуль по п. 1, отличающийся тем, что его наружная поверхность имеет форму цилиндра, или составного цилиндра, или усеченного конуса, или комбинации по меньшей мере одного цилиндра и по меньшей мере одного усеченного конуса, причем эта поверхность в области примыкания к борту корпуса гусеничной машины расположена не ниже ее днища.
3. Тяговый модуль по п. 1, отличающийся тем, что тормоз приспособлен для его использования в качестве стояночного тормоза, а тяговый электродвигатель и планетарный бортовой редукторы выполнены обратимыми с возможностью электродинамического торможения гусеничной машины при ее работе и/или буксировке.
4. Тяговый модуль по п. 2, отличающийся тем, что тормоз выполнен барабанным или нормально замкнутым многодисковым фрикционным с пружинами, сжимающими диски тормоза при отсутствии давления в контуре управления этим тормозом.
5. Тяговый модуль по п. 1, отличающийся тем, что он имеет объединенную систему смазки, и/или охлаждения, и/или фильтрации рабочей жидкости тягового электродвигателя, и/или планетарного бортового редуктора, и/или тормоза.
6. Тяговый модуль по п. 1, отличающийся тем, что тяговый электродвигатель выполнен бескорпусным или с тонкостенной оболочкой, а присоединение тягового модуля к гусеничной машине осуществляется через опорный стакан, прикрепленный к планетарному бортовому редуктору.
7. Тяговый модуль по п. 1, отличающийся тем, что вал тягового электродвигателя непосредственно или через передаточное устройство соединен с ведущим валом планетарного бортового редуктора, а тормоз размещен внутри тягового электродвигателя или расположен между тяговым электродвигателем и планетарным бортовым редуктором и соединен с валом тягового электродвигателя или с ведущим валом планетарного бортового редуктора.
8. Тяговый модуль по п. 1, отличающийся тем, что тяговый электродвигатель выполнен с двумя концами вала, первый из которых непосредственно или через передаточное устройство соединен с ведущим валом планетарного бортового редуктора, а противоположный конец вала соединен с тормозом.
9. Тяговый модуль по п. 1, отличающийся тем, что вал тягового электродвигателя непосредственно или через передаточное устройство соединен с ведущим валом планетарного бортового редуктора, а тормоз соединен с ведущим, или промежуточным, или ведомым валом планетарного бортового редуктора, причем тормоз и тяговый электродвигатель расположены с разных сторон планетарного бортового редуктора или по меньшей мере его одной ступени.
| Многофакельная газокислородная горелка-мундштук | 1950 |
|
SU92844A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГОВЫЙ МОДУЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2545249C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| Установка для резки листового стекла | 1961 |
|
SU140963A1 |
| US 9027677 B2, 12.05.2015. | |||

