Область техники
Настоящее изобретение относится к области эстиматоров состояния системы и находит свое конкретное применение для контроллера состояния системы, космического аппарата или в области авиации.
Уровень техники
Во время работы системы необходимо осуществлять непрерывный контроль состояния различных устройств, таких как вентили, причем эти устройства играют основную роль в работе системы.
Чтобы обнаружить неисправность, в рамках некоторых стратегий производят и сравнивают два измерения. Если эти измерения отличаются на значение сверх заранее определенного порога, обнаруживают аномалию системы.
В этом случае необходимо определить, какое из двух измерений является правильным, а какое ошибочным. Однако во многих вариантах применения и, в частности, в области космоса и авиации, нельзя предусмотреть остановку систему и ее обслуживание.
Поэтому используют модель для получения контрольного значения, которое позволит различить два разных измерения и идентифицировать правильное измерение и ошибочное измерение. Обычно применяемые решения состоят в оценке линейной модели путем численного интегрирования с постоянным шагом в реальном времени модели состояния. Однако достижение высокой точности требует очень большого числа вычислений.
Например, если рассматривать контроль состояния вентиля, средняя скорость которого равна 100°/с, получение точности в 0,1° потребует шага интегрирования в 1 мс. При этом получение такой точности потребует установления ритмичности в 1 мс или точности вычисления с циклом интегрирования в 1 мс. Следовательно, число вычислений является слишком большим, если учитывать ограниченные числовые ресурсы.
Раскрытие изобретения
Чтобы по меньшей мере частично решить эти различные проблемы, изобретением предложен контроллер состояния системы, содержащий вычислительное устройство и память,
при этом системой управляет команда, определяющая несколько рабочих режимов системы, при этом каждый рабочий режим соответствует применению одного значения команды,
при этом память содержит набор записанных матриц состояния, отображающих для каждого рабочего режима линейной системы значение его состояния во времени при условии постоянной команды на данном промежутке времени,
при этом вычислительное устройство выполнено таким образом, чтобы во время работы системы определять оценочные значения состояния системы в данный момент при помощи записанных в памяти матриц состояния и его состояния в предшествующий момент.
Как правило, каждый рабочий режим соответствует применению к системе постоянного значения команды, что позволяет значительно снизить стоимость вычислений.
Предпочтительно для каждого рабочего режима системы определяют число N единичных продолжительностей Ti, при которых для рассматриваемой системы каждую продолжительность работы Tf в данном рабочем режиме можно разложить в виде  , где ki обозначает натуральные целые числа, при этом каждая функция состояния отражает линейное изменение состояния системы за данную единичную продолжительность Ti. Соответственно, более короткий шаг Tj позволяет оценить значение с разрешением Tj, при этом время разлагают таким образом, что T=n*Ti +m*Tj, где n и m являются натуральными целыми числами.
, где ki обозначает натуральные целые числа, при этом каждая функция состояния отражает линейное изменение состояния системы за данную единичную продолжительность Ti. Соответственно, более короткий шаг Tj позволяет оценить значение с разрешением Tj, при этом время разлагают таким образом, что T=n*Ti +m*Tj, где n и m являются натуральными целыми числами.
В варианте для каждого рабочего режима системы определяют числа N и M единичных продолжительностей Ti и Tj, при которых для рассматриваемой системы каждую продолжительность работы Tf в данном рабочем режиме можно разложить в виде  , где ki и kj являются натуральными целыми числами, при этом каждая функция состояния отражает линейное изменение состояния системы за данную единичную продолжительность Ti или Tj.
, где ki и kj являются натуральными целыми числами, при этом каждая функция состояния отражает линейное изменение состояния системы за данную единичную продолжительность Ti или Tj.
Как правило, указанные функции состояния определяют при помощи метода нулевого порядка.
Как правило, вычислительное устройство выполнено с возможностью изменять параметр, характеризующий постоянную команду, применяемую к системе, чтобы моделировать изменения системы во время ее работы.
Объектом изобретения является также способ контроля состояния системы, управляемой при помощи команды, в котором:
- определяют максимальное число рабочих режимов системы таким образом, чтобы при каждом рабочем режиме на систему действовала команда постоянного значения,
- определяют набор записанных в памяти функций состояния, отражающих для каждого рабочего режима системы ее состояние для разных значений времени, соответствующих продолжительностям применяемых команд,
- сохраняют в памяти функции состояния таким образом, чтобы во время работы системы определять оценочные значения состояния системы в данный момент при помощи функций состояния и ее состояния в предшествующий момент.
Каждый рабочий режим соответствует, например, применению к системе постоянного значения команды.
Предпочтительно для каждого рабочего режима системы определяют число N единичных продолжительностей Ti, соответственно число М единичных продолжительностей Tj размером, меньшим Ti, при которых для рассматриваемой системы каждую продолжительность работы Tf в данном рабочем режиме можно разложить в виде , где ki и kj являются натуральными целыми числами, при этом каждая функция состояния отражает значение состояния линейной системы за данную продолжительность N*Ti или M*Tj. M и N являются ограниченными значениями, при этом сумма N*Ti+M*Tj позволяет охватить продолжительность постоянных команд, применяемых к системе.
В варианте, для каждого рабочего режима системы определяют числа N и M единичных продолжительностей Ti и Tj, при которых для рассматриваемой системы каждую продолжительность работы Tf в данном рабочем режиме можно разложить в виде , где ki и kj являются натуральными целыми числами, при этом каждая функция состояния отражает линейное изменение состояния системы за данную единичную продолжительность Ti или Tj.
Указанные функции состояния определяют, например, при помощи метода нулевого порядка.
Как правило, вычислительное устройство выполнено с возможностью изменять параметр, характеризующий постоянную команду, применяемую к системе, чтобы моделировать изменения системы во время ее работы.
Краткое описание чертежей
Другие отличительные признаки, задачи и преимущества системы будут более очевидны из нижеследующего описания, представленного исключительно в качестве иллюстративного и не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
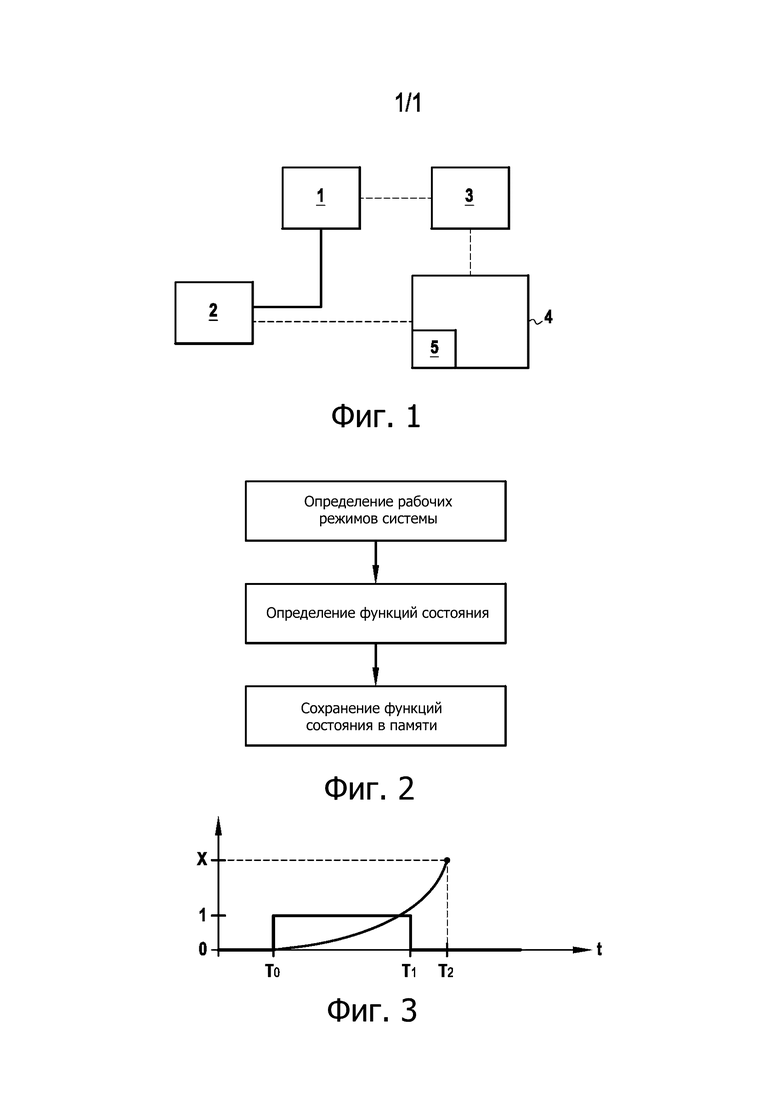
Фиг. 1 - схема контроллера состояния в соответствии с изобретением.
Фиг. 2 - схема процесса подготовки матриц для контроллера или способа в соответствии с изобретением.
Фиг. 3 - пример применения контролера состояния в соответствии с изобретением.
Осуществление изобретения
Система и способ в соответствии с изобретением описаны со ссылками на фиг. 1 и 2, которые схематично иллюстрируют такой контроллер и процесс подготовки матриц для такого контроллера или для осуществляемого способа.
Показанный контроллер состояния содержит систему 1, управляемую устройством 2 управления, применяющим команду, один или несколько датчиков 3, выполненных с возможностью измерения состояния системы 1, и вычислительное устройство 4, содержащее память 5.
Рассматриваемая система 1 может быть системой любого типа, например, речь может идти о роторе двигателя, о приводе или о любой системе, если она работает в линейном режиме и содержит, например, одно или несколько устройств.
Устройство 2 управления управляет системой 1 путем применения команды, как правило, команды типа импульса прямоугольной формы, то есть команды, постоянной за данный интервал времени.
В случае применения для валидации измерения датчик 3 считывает одно или несколько измерений состояния системы 1 и передает затем эти измерения в вычислительное устройство 4 для их обработки. Осуществление нескольких измерений для определения одного и того же состояния позволяет уменьшить неточности, например, путем вычисления среднего значения между разными измерениями.
Кроме того, вычислительное устройство 4 определяет оценочное значение состояния, которое сравнивают со значениями состояния, измеренными датчиком, чтобы обнаружить потенциальные погрешности измерений или несоответствия, и в этом случае ненадлежащие измеренные значения исключают, и вместо измеренных значений состояния используют оценочное значение состояния.
Определение этого оценочного значения состояния производят при помощи функций состояния, например, определенных в виде матриц состояния, записанных в памяти 5.
Эти функции состояния определяют до начала работы системы 1, и они являются постоянными во время ее работы.
Функции состояния определяют таким образом, чтобы для каждого рабочего режима системы 1 выражать значение проекции во времени состояния системы 1.
Под рабочим режимом системы 1 следует понимать применение команды, генерируемой вычислительным устройством 4 и применяемой устройством 2 управления, при этом изменение рабочего режима системы 1 обычно соответствует прерыванию применяемой команды. Рабочие режимы системы 1 могут также соответствовать внешним условиям, действующим на систему 1.
Таким образом, входным параметром контроллера является рабочий режим, соответствующий амплитуде команды и внешним условиям, влияющим на систему 1.
Например, если рассматривать систему 1, управляемую командой типа «все или ничего», можно определить три рабочих режима для системы 1:
- первый рабочий режим, в котором применяемая команда является нулевой,
- второй рабочий режим, в котором применяемая команда равна единичному постоянному значению 1, и
- третий рабочий режим, в котором применяемая команда равна единичному постоянному значению -1.
Разумеется, число рабочих режимов зависит от устройства 2 управления и от применяемой команды.
После определения числа рабочих режимов системы 1 для каждого рабочего режима системы 1 определяют набор функций состояния, например, в виде матриц состояния, которые отражают значение проекции во времени состояния системы 1 для данного рабочего режима.
Например, для каждого рабочего режима системы 1 можно определить число N единичных продолжительностей Ti, при которых каждую продолжительность работы Tf в данном рабочем режиме можно разложить в виде , где ki обозначает натуральные целые числа, при этом каждая функция состояния отражает значение проекции состояния системы 1 на данную единичную продолжительность Ti.
Для повышения точности можно увеличить разрешение, вводя единичные продолжительности Tj, кратные Ti.
Например, вводя Ti=10мс и продолжительность Tj=1мс, для импульса прямоугольной формы 83 мс достаточно вычислить значение состояния для 80 мс, затем для 3 мс.
Предпочтительно функции состояния определяют при помощи метода нулевого порядка, что позволяет получить точность, равную или по крайней мере очень близкую к точности метода непрерывных интеграций, в частности, для линейных систем 1, управляемых при помощи команды типа импульса прямоугольной формы.
Во время работы системы 1 вычислительное устройство 4 использует функции состояния, соответствующие режиму работы системы 1, для определения оценки состояния системы 1, при этом функции состояния сохраняют в памяти 5 заранее, а не вычисляют во время работы системы.
Процесс подготовки матриц состоит из трех этапов, как показано на фиг. 2:
- первый этап определения рабочих режимов системы 1,
- второй этап определения функций состояния для разных рабочих режимов системы 1, и
- третий этап сохранения функций состояния в памяти, в данном случае в памяти 5, показанной на фиг. 1.
Таким образом, вычислительное устройство 4 может учитывать изменения работы системы 1, не прибегая к повторному вычислению всех или части функций состояния, записанных в памяти 5. В каждом цикле вычисления вычислительное устройство определяет оценочное значение состояния системы 1 на основании предыдущего значения состояния, применяемой команды и функций состояния, соответствующих рабочему режиму системы, причем эти функции состояния хранятся в памяти 5 и остаются постоянным во время работы системы 1.
На фиг. 3 представлен пример оценки состояния системы 1.
На этой фигуре показана команда, применяемая для системы в течение времени, в данном случае команда типа импульса прямоугольной формы, которая может принимать два значения: 0 и 1.
На этой фигуре показано также оценочное состояние Х системы в момент Т2 в зависимости от ее реального перемещения.
В первоначальном состоянии применяемая команда является нулевой, и система находится в нулевом состоянии; она остается в своем первоначальном состоянии, при этом система находится в первом рабочем режиме, соответствующем применению нулевой команды.
В момент Т0 применяют команду, равную 1. При этом система находится во втором рабочем режиме. Вычислительное устройство 4 применяет функции состояния, соответствующие этому второму рабочему режиму системы, и вычисленное состояние системы изменяется в течение времени в соответствии с ее линейной динамикой.
Вычисление состояния системы производят последовательными шагами, а не непрерывно, при этом число шагов зависит от необходимого разрешения и от выбранной оси времени.
Например, если рассматривать порядки максимальной продолжительности 100 мс, определяют:
- ось времени Ti = 10 мс, и в памяти сохраняют матрицы оценки для 10, 20, 30, 40, 50, 60, 70, 80, 90 и 100 мс;
- ось времени Tj = 1 мс, и в памяти сохраняют матрицы оценки для 1, 2, 3, 4, 5, 6, 7, 8 и 9 мс.
Таким образом, команду продолжительностью 87 мс вычисляют в два этапа вычисления при помощи матрицы 70 мс (i=7) и матрицы 8 мс (j=8).
В момент Т1 > Т0 команда опять становится нулевой. Система находится при этом в третьем рабочем режиме, соответствующем нулевой команде по завершении движения. Следовательно, состояние системы меняется, например, под действием инерции системы, до значения Х в момент T2 > T1, в который инерция больше не оказывает влияния и система переходит опять в первый рабочий режим.
Функции состояния, определенные перед работой системы 1 и сохраненные в памяти 5, могут, например, использоваться фильтром Калмана для вычисления изменения состояния системы 1 или для любой другой функции, применяющей оценку состояния при условии подачи команды в виде постоянного отрезка, применяемого для системы, которая считается линейной.
Таким образом, настоящее изобретение позволяет значительно уменьшить вычислительную мощность, необходимую для определения состояния рассматриваемой линейной системы в ее рабочей области, сохраняя при этом точность, близкую и даже идентичную точности системы, использующей непрерывное числовое интегрирование.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ ИЛИ ТОКА ФИЛЬТРА RLC, НОСИТЕЛЬ ИНФОРМАЦИИ И ТРАНСПОРТНЫЕ СРЕДСТВА ДЛЯ ПРИМЕНЕНИЯ ЭТОГО СПОСОБА | 2008 |
|
RU2459346C2 |
| ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА С АППАРАТНО-ПРОГРАММНОЙ РЕАЛИЗАЦИЕЙ ФУНКЦИЙ ОТКАЗОУСТОЙЧИВОСТИ И ДИНАМИЧЕСКОЙ РЕКОНФИГУРАЦИИ | 2010 |
|
RU2455681C1 |
| Аналого-цифровая вычислительная система и аналоговая вычислительная машина (ее варианты) | 1983 |
|
SU1259300A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| Микропрограммное устройство управления | 1983 |
|
SU1168936A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЛИНЕЙНОГО СОЛЕНОИДА | 2019 |
|
RU2719336C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЖИМОМ НАПРЯЖЕНИЯ В ЭЛЕКТРИЧЕСКОЙ СЕТИ С ПРИМЕНЕНИЕМ FUZZY-ЛОГИКИ | 2010 |
|
RU2416855C1 |
| УСТРОЙСТВО И СПОСОБ ОПТИМИЗАЦИИ ГОРЕНИЯ В ЛИНИЯХ ПЕРЕГОРОДОК МНОГОКАМЕРНОЙ ПЕЧИ ДЛЯ ОБЖИГА УГЛЕРОДИСТЫХ БЛОКОВ | 2012 |
|
RU2600607C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОТКАЗОУСТОЙЧИВОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ И ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2439674C1 |
| УПРАВЛЕНИЕ СКОРОСТЬЮ, С КОТОРОЙ ОБРАБАТЫВАЮТСЯ ЗАПРОСЫ НА ПРЕРЫВАНИЕ, ФОРМИРУЕМЫЕ АДАПТЕРАМИ | 2010 |
|
RU2526287C2 |
Группа изобретений относится к комплексу и способу для контроля состояния системы. Комплекс содержит систему, контроллер состояния системы. Контроллер состояния содержит вычислительное устройство и память. Для контроля состояния системы определяют максимальное число рабочих режимов системы, определяют набор записанных в памяти функций состояния, представляющих для каждого рабочего режима системы значение проекции ее состояния во времени, сохраняют в памяти функции состояния так, чтобы во время работы системы при помощи вычислительного устройства определять оценочные значения состояния системы в данный момент при помощи функций состояния и ее состояния в предшествующий момент. Обеспечивается непрерывный контроль состояния различных систем. 2 н. и 8 з.п. ф-лы, 3 ил.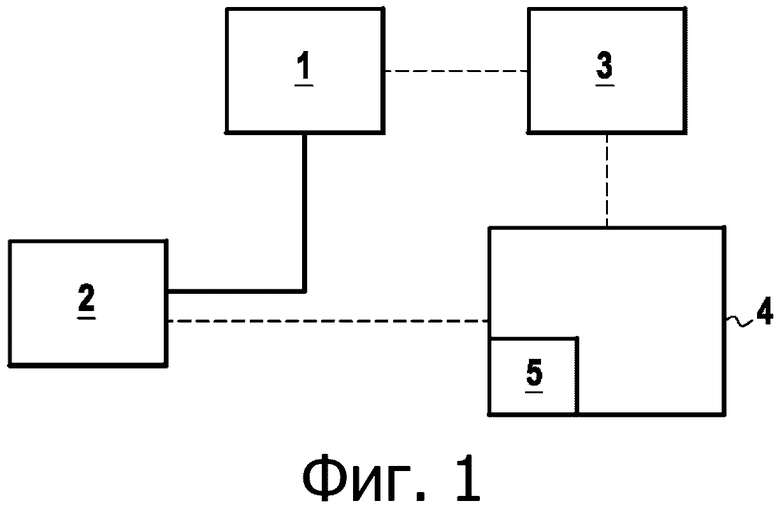
1. Комплекс для контроля состояния системы (1), содержащий указанную систему (1) и контроллер состояния указанной системы (1), при этом указанный контроллер состояния содержит вычислительное устройство (4) и память (5),
при этом управление системой (1) осуществляется посредством команды, имеющей постоянное значение, выбранное среди множества значений, при этом каждое значение определяет рабочий режим системы (1),
память (5) содержит набор записанных в памяти функций состояния, представляющих для каждого рабочего режима системы (1) значение проекции ее состояния во времени, и
вычислительное устройство (4) выполнено с возможностью определять во время работы системы оценочные значения состояния системы (1) в данный момент при помощи функций состояния и ее состояния в предшествующий момент.
2. Комплекс по п. 1, в котором каждый рабочий режим соответствует применению к системе (1) команды постоянного значения.
3. Комплекс по п. 1, в котором для каждого рабочего режима системы (1) определено число N единичных продолжительностей Ti, причем для рассматриваемой системы (1) каждую продолжительность работы Tf в данном рабочем режиме можно разложить в виде  , где ki – натуральные целые числа, при этом каждая функция состояния отражает линейное изменение состояния системы (1) за данную единичную продолжительность Ti.
, где ki – натуральные целые числа, при этом каждая функция состояния отражает линейное изменение состояния системы (1) за данную единичную продолжительность Ti.
4. Комплекс по п. 1, в котором для каждого рабочего режима системы (1) определены числа N и M единичных продолжительностей Ti и Tj, причем для рассматриваемой системы (1) каждую продолжительность работы Tf в данном рабочем режиме можно разложить в виде  , где ki и kj –натуральные целые числа, при этом каждая функция состояния отражает линейное изменение состояния системы (1) за данную единичную продолжительность Ti или Tj.
, где ki и kj –натуральные целые числа, при этом каждая функция состояния отражает линейное изменение состояния системы (1) за данную единичную продолжительность Ti или Tj.
5. Комплекс по п. 1, в котором указанные функции состояния определяют при помощи метода нулевого порядка.
6. Способ контроля состояния системы, управляемой при помощи команды, в котором:
определяют максимальное число рабочих режимов системы (1) так, чтобы при каждом рабочем режиме на систему (1) действовала команда постоянного значения,
определяют набор записанных в памяти функций состояния, представляющих для каждого рабочего режима системы (1) значение проекции ее состояния во времени,
сохраняют в памяти (5) функции состояния так, чтобы во время работы системы (1) при помощи вычислительного устройства (4) определять оценочные значения состояния системы (1) в данный момент при помощи функций состояния и ее состояния в предшествующий момент.
7. Способ по п. 6, в котором каждый рабочий режим соответствует применению к системе (1) команды постоянного значения.
8. Способ по п. 6, в котором для каждого рабочего режима системы (1) определяют число N единичных продолжительностей Ti, причем для рассматриваемой системы (1) каждую продолжительность работы Tf в данном рабочем режиме можно разложить в виде , где ki – натуральные целые числа, при этом каждая функция состояния отражает линейное изменение состояния системы (1) за данную единичную продолжительность Ti.
9. Способ по п. 6, в котором для каждого рабочего режима системы (1) определяют числа N и M единичных продолжительностей Ti и Tj, причем для рассматриваемой системы (1) каждую продолжительность работы Tf в данном рабочем режиме можно разложить в виде , где ki и kj – натуральные целые числа, при этом каждая функция состояния отражает линейное изменение состояния системы (1) за данную единичную продолжительность Ti или Tj.
10. Способ по п. 6, в котором указанные функции состояния определяют при помощи метода нулевого порядка.
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СИСТЕМ АВИОНИКИ, СВЯЗАННЫХ С ОБЩЕЙ СРЕДОЙ | 2008 |
|
RU2477515C2 |
| Способ определения трибутилфосфата в смеси трибутилфосфат - керосин | 1958 |
|
SU114186A1 |
| US 7689296 B2, 30.03.2010 | |||
| US 6643554 B2, 04.11.2003 | |||
| US 7987145 B2, 26.07.2011. | |||

