Изобретение относится к неразрушающим динамическим испытаниям конструкций и может быть использовано для своевременной диагностики повреждений и дефектов элементов ферм.
Широко известно, что во многих случаях причинами тяжелых разрушений строительных конструкций, смонтированных на основе ферм, являются скрытые дефекты в стержнях их нижних растянутых и сжатых поясов, решеток/трещины, недопустимые деформации стержней, дефекты в монтажных стыках, непроваренные сварные швы и т.п. /. Например, обрушение наклонных туннелей комплексов дробления руды горного промышленного комбината /см. А.И. Добромыслов. Диагностика повреждений зданий и инженерных сооружений. - М., ʺСправочное пособиеʺ, 2007, с. 125-130 [1] /, обрушение конвейерной галереи, состоящей из 4-х балочных пролетных строений ферм / см. Сахновский М.М. Уроки аварий стальных конструкций. Киев., 1969, с. 33-35, рис. 18 [2] / по причине разрушения сварных швов в нижних поясах ферм, разрушение транспортной галереи /см. [2], с. 37-38/, состоящей из 2-х параллельно расположенных пролетных строений в виде 4-х пролетной цепи разрезных балочных ферм по причине образования трещин и деформаций в нижнем поясе, приведших к потере устойчивости, обрушение 2-х пролетного автодорожного моста из-за повреждений стержней и узлов нижнего пояса и решетки фермы /см. А.Н. Шкинёв. Аварии в строительстве. М., Стройиздат, 1984, с. 285-287 [3]/, разрушение транспортного отвального моста /см. [2], с. 52-54/ вследствие; также дефектов стержней и узлов нижнего пояса фермы. При этом для ряда конструкций строительных ферм очень часто характерно размещение части конструкции, в основном стержней нижних поясов и решеток в труднодоступной для контроля среде, например, в воде, земляном, песчаном, галечном или глинистом грунте, болотистой почве, в залежнях торфяников, в плотной снежной массе, либо в полостях других строительных сооружений, например, бетонных массивов с затрудненными возможностями доступа для контроля. Например, в гидротехнических сооружениях доки на судоремонтных заводах частично подняты над сушей с расположением нижней части в песке, иле или в рыхлой ледниково-песчаной породе, /см. Н.Г. Трупак. Замораживание грунтов в строительстве, М., 1970, с. 151 [4]/. Нижняя часть пролетов мостов в виде ферм могут находиться в воде или в насыщенном водой грунте /см. [4], с. 204/. Также подземные участки комплексов дробления руды горнообогатительных комбинатов в виде наклонных транспортных туннелей из ферм улублены в слои песка, глины, гальки и т.п. /см. [4], с. 209-210/.
Известны способы статических испытаний конструкций ферм на стенде путем приложения нагрузки весовыми грузами /см. Долидзе Д.Е. Испытания конструкций и сооружений, М., 1975, с. 140-141 [5]/, либо домкратами /см. Испытания сооружений. Справ, пособ. под ред. Ю.Д. Золотухина, Мн., 1992, с. 168-172 [6]/, либо путем приложения усилий натяжными устройствами к узлам нижнего, верхнего поясов фермы и решетки и измерения деформаций /см. Аронов РиИ. Испытание сооружений, М., 1974, с. 73-75, 62-63 [7]/, либо с помощью эластичных герметичных камер нагружения, соединенных с источником давления / см. Аистов Н.Н. Испытание сооружений, Госстройиздат, 1960, с. 183 [8].
Недостатками известных способов является предельная сложность реализации, громоздкость и низкая информативность, невозможность использования для оперативного контроля дефектов в процессе эксплуатации конструкции.
Известны также динамические способы виброакустического, контроля одноосных стержневых конструкций, реализующие методы-свободных и вынужденных колебаний, предусматривающие выделение. локальны х зон изделия, их последовательное перемещение вдоль конструкции с нагружением присоединенными массами и возбуждение колебаний в пределах данной зоны / см., например, а.с. СССР №1226303, кл. G01N 29/04, 1986 [9]; а.с. СССР №1396047, кл. G01N 29/04, 1988 [10] /.
Однако, если известные способы могут быть использованы для контроля дефектов в одиночных стержнях и некоторым образом, в случае преодоления ряда проблем, в легкодоступных стержнях верхних поясов ферм, то для динамического контроля удаленных стержней нижних поясов и межпоясных решеток многопролетных ферм реализация данных способов будет представлять огромную сложность, причем, в случаях размещения вышеуказанный стержней в труднодоступных средах - практически невозможной.
Наиболее близким способом того же назначения к заявленному изобретению по совокупности существенных признаков является способ виброакустического /резонансного/ контроля изделий, заключающийся в том, что в контролируемом изделии возбуждают вынужденные упругие колебания с изменяющейся частотой, регистрируют значение частоты резонансных колебаний, по отклонению которого от заданного значения судят о наличие дефекта / см. а.с. СССР №690378, кл. G01N 29/04, 1977 [11] /, и принятый за прототип.
Недостатками способа-прототипа в случае его реализации для контроля ферм является необходимость предварительного знания заданных /паспортных/ значений резонансных частот всех стержней фермы, а также обеспечение возможности доступа к этик стержням для последовательного их возбуждения и регистрации в каждом из них резонансных колебаний, что предельно увеличивает трудоемкость процесса осуществления способа, делая его труднореализуемым для удаленных от внешней поверхности фермы стержней нижних поясов и решеток, и практически нереализуемым для контроля стершей фермы, расположенных в труднодоступных средах.
Сущность изобретения заключается в создании способа виброакустического контроля стержней ферм, обеспечивающего высокую эффективность при сравнительно низкой трудоемкости реализации за счет возможности оперативного контроля скрытых дефектов и разрушений в стержнях нижних поясов и решеток Ферм, расположенных в труднодоступных для контроля средах, путем создания механической жесткостной связи этих стержней с легкодоступными стержнями верхнего пояса фермы и анализа уровня возникающего при этом влияния дефектов на изменение характера динамических характеристик вышеуказанных доступных стержней.
Технический результат - повышение эффективности, достоверности и снижение трудоемкости процесса контроля.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном способе виброакустического контроля расположенных в труднодоступной среде стержней фермы, включающем возбуждение в стержне вынужденных упругих колебаний с изменяющейся частотой и регистрацию значения частоты его резонансных колебаний, особенность заключается в том, что в качестве возбуждаемого стержня выбирают один из легкодоступных для измерений и расположенный вне труднодоступной среды, стержень верхнего пояса фермы, последовательно соединяют данный стержень жесткой фиксирующей изогнутой заданным образом распоркой регулируемой длины со всеми контролируемыми стержнями нижних поясов и решеток, фермы, расположенных в труднодоступной среде в зоне возможного осуществления их механического контакта с выбранным возбуждаемым стержнем, и осуществляют процесс замораживания участка труднодоступной среды, охватывающей соответствующий контролируемый стержень, при этом регистрируют вышеуказанным образом резонансную частоту возбуждаемого стержня для каждого соединения дважды до и после осуществления процесса замораживания, а о наличие дефекта в соответствующем труднодоступном стержне судят по резкому увеличению резонансной частоты возбуждаемого стержня во втором измерении, после чего выбирают в качестве возбуждаемых другие легкодоступные стержни верхнего пояса фермы и повторяют аналогичным образом процесс контроля до охвата всей зоны расположения стержней в труднодоступной среде.
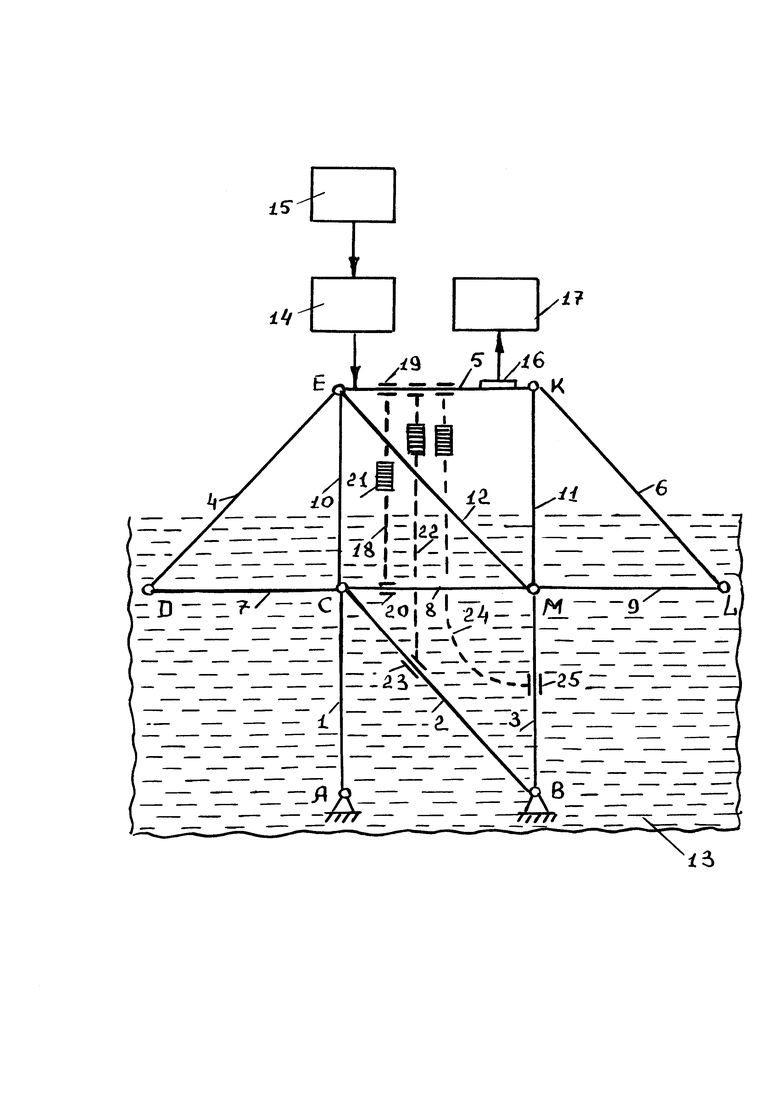
Сущность изобретения поясняется чертежом, где схематически изображено устройство для реализации предлагаемого способа для плоского пролета фермы с полностью погруженными в труднодоступную среду опорными стержнями и стержнями нижнего пояса и доступными стержнями верхнего изогнутого пояса и межпоясной решетки с тремя вариантами установки жестких фиксирующих распорок.
Плоский пролет фермы установлен на стержневой опоре А со стержнем I и шарнирно-неподвижной опоре В с входящими стержнями 2 и 3, и состоит из стержней 4, 5, 6 изогнутого верхнего пояса, стержней 7, 8, 9 прямолинейного нижнего пояса и вертикальных 10, 11 и наклонного 12 стержней межпоясной решетки, закрепленных в узлах С, Д, Е, К, М, L. При этом, например, опорные стержни и стержни 7, 8, 9 нижнего пояса полностью погружены в трудно доступную внешнюю среду 13, например, в насыщенный водой песчаный грунт, стержни 4 и 6 верхнего пояса и 10, 11, 12 решетки частично погружены в грунт 13, а стержень 5 верхнего пояса полностью открыт для доступа. Механизм для реализации способ представляет собой вибратор 14, подключенный к выходу генератора 15 электрических сигналов, прикрепленный к возбуждаемому стержню пьезоэлектрический измеритель перемещений 16, последовательно соединенный с измерительным усилителем 17, и жесткую, изогнутую заданным образом распорку 18 с фиксаторами 19 и 20 по концам на соединяемых распоркой 18 стержнях, и регулятором 21 длины распорки 18, выполненным, например, в виде поворотной гайки, соединяющей две части распорки 18 с разнонаправленными резьбами в местах соединения / на рисунке в качестве примера показаны три отдельных варианта соединения фиксирующими распорками разных контролируемых стержней фермы.
Способ виброакустического контроля осуществляют следующим образом.
Очевидно, что в качестве возбуждаемого в первую очередь целесообразно выбрать стержень 5 верхнего пояса, доступный для контакта по всей своей длине и расположенный вне труднодоступной среды 13. Вводят вибратор 14 в контакт с левым концом данного стержня 5 и прикрепляют пъезоэлектрический измеритель перемещений 16 к другому концу стержня 5. Сначала проиллюстрируем процесс контроля с помощью возбуждаемого стержня 5 стержня 8 нижнего пояса фермы. Для этого соединяем стержни 5 и 8 жесткой изогнутой распоркой 18/пунктирной линией показана на рисунке вследствие ее установки и последующего съема/, закрепляемой с помощью фиксаторов 19 и 20 по возможности ближе к средней части стержней 5 и 8, подбирая необходимую длину распорки регулятором длины 21. Изогнутость распорки 18 в перпендикулярной плоской ферме плоскости позволяет при соединении стержней 5 и 8 обогнуть стержень 12. Для удобства процесса соединения стержней 5 и 8 сначала плотно надевают раздвинутые губы фиксаторов 19 и 20 соответственно на стержни 5 и 8, далее зажимают имеющие доступ губы фиксатора 19, после чего регулятором 21, изменяя длину распорки 18, осуществляют ее заданный натяг на стержнях 5 и 8. Далее, возбуждают вибратором 14 в стержне 5 вынужденные упругие колебания с плавно увеличивающейся частотой, и с помощью пъезоэлемента 16 и измерительного усилителя 17 регистрируют низшую резонансную частоту стержня 5 из всего спектра его собственных частот по моменту резкого возрастания амплитуды его колебаний, то есть резонансную частоту первого измерения. После этого, не убирая распорку 18, осуществляют процесс замораживания участка труднодоступной среды 13, охватывающего контролируемый стержень 8/ то есть, по возможности всего прилегающего к стержню 8 слоя данной среды/. При этом используют специальные замораживающие колонки, в которых осуществляют циркуляцию охлаждаемого теплоносителя/раствора CaCl2 / отнимающего через стенку замораживающей трубы тепло от среды 13/. в данном случае - насыщенного водой песчаного грунта //. см. X.Р. Хакимов. Замораживание грунтов в строительных целях. М., 1962, с. 4-5, 122-125 [12]; [4] с. 180-182 /. Далее, вышеуказанный процесс регистрации низшей резонансной частоты возбуждаемого стержня 5 повторяют, то есть находят резонансную частоту во втором измерении, после чего о наличие дефекта контролируемого труднодоступного стержня 8 судят по резкому увеличению резонансной частоты возбуждаемого стержня 5 во втором измерении. После этого при том же возбуждаемом стержне 5 контролируют стержень 2, при этом распорку 18 заменяют распоркой 22, также закрепляемой по возможности в серединах стержней 5 и 2, и процесс измерения повторяют. Далее тот же стержень 5 соединяют распоркой 24 со стержнем 3 и осуществляют аналогичный контроль последнего. Следует специально отметить, что при контроле стержней 2 и 3 губы 23 и 25 нижних фиксаторов распорок 22 и 24 ориентированы, соответственно, наклонно и вертикально, что предъявляет к губам 23 и 25 более жесткие требования. Поэтому, последние целесообразно для создания значительных сил трения выполнять из жесткой резины с шипованной поверхностью. Более того, может быть использован вариант выполнения, например, правой губы фиксатора 25 в виде постоянного магнита и легкой фиксации его по одну сторону стержня 3, при одновременном выполнении левой губы этого фиксатора, связанной с распоркой 24 ферромагнитной, что обеспечит при установке распорки 24 жесткое зажатие стерня 3 фиксатором 25 с двух сторон. Далее, выбирают в качестве возбуждаемого, например, легкодоступный стержень 4 верхнего пояса и контролируют стержни 7 и 1, расположенные в труднодоступной среде и т.д. до охвата процессом контроля всех стержней, расположенных в труднодоступной среде 13. Необходимо пояснить характер влияния дефектов в контролируемом стержне на динамические характеристики, в частности-низшую резонансную частоту связываемого с ним распоркой возбуждаемого стержня. Например, проиллюстрируем характер изменения резонансной частоты стержня 5 при его связи жесткой распоркой 18 со стержнем 8. Как известно из теории колебаний, низшая резонансная частота стержня 5 определяется изгибной жесткостью самого стержня 5, на которую коренным образом влияют как изгибная жесткость распорки 18, так и место ее крепления к стержню 5 и натяг распорки 18. Так как в двух вышеописанных измерениях резонансных частот до и после замораживания место крепления распорки 18 к стержню 5 и натяг распорки 18 постоянны, необходимо рассматривать только изменение изгибной жесткости распорки 18, которая в значительной степени определяется контактной жесткостью стыкового соединения распорки 18 с контролируемым стержнем 8 /см., например, Левина З.М., Решетов Д.Н. Контактная жесткость машин. М., Машиностроение, 1971 [13]; Ананьев И.В., Колбин Н.И., Серебрянский Н.П. Динамика конструкций летательных аппаратов. М., Машиностроение, 1972 [l4] /. В данном конкретном случае при соединении с натягом конца распорки 18 со стержнем 8 контактная жесткость стыкового соединения однозначно определяется изгибной жесткостью стержня 8. Очевидно, что при наличие даже скрытых дефектов в стержне 8/ трещины, нарушения в сварке и т.п. / изгибная жесткость стержня 8, а, соответственно, жесткость распорки 18 и низшая резонансная частота стержня 5 скачком уменьшаться. Как подробно исследовано в [13] и [14], изменение условий контакта приводит к скачкообразному изменению корней частотного уравнения и может привести к изменению частоты порядка в 2-2,5 раза. Поэтому, при замораживании стержня 8 во втором измерении, исключающем влияние дефектов в нем на характер резонансной частоты в стержне 5, последняя скачком возрастет после первого измерения. Следует специально указать, что в случае труднодоступности для контроля какого либо стержня из-за нахождения его не в специфической среде, а, например, в полости другого строительного массива, для осуществления предлагаемого способа контроля можно специально ввести в полость в зону данного стержня какой либо материал, например, песок, после чего его заморозить.
По мнению заявителей, предлагаемый способ может оказать существенную помощь при оперативном контроле многочисленных конструкций ферм, работающих в специфических условиях. При этом, очень важно, что после обнаружения дефекта здесь требуется уже не слепой демонтаж конструкции, а целевая замена определенного элемента, пусть даже расположенного в труднодоступной зоне фермы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ виброакустических испытаний ферм | 2017 |
|
RU2684684C1 |
| Способ неразрушающего определения и мониторинга несущей способности стальных ферм | 2022 |
|
RU2784318C1 |
| Способ неразрушающей оценки и контроля несущей способности и надежности стальных ферм | 2022 |
|
RU2797787C1 |
| СПОСОБ ВИБРОАКУСТИЧЕСКОГО КОНТРОЛЯ ОДНООСНЫХ КОНСТРУКЦИЙ | 1999 |
|
RU2170426C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТИ ГОРИЗОНТАЛЬНОГО ШВА В ДВУХСЛОЙНЫХ КОНСТРУКЦИЯХ БАЛОЧНОГО ТИПА | 2009 |
|
RU2406075C1 |
| СПОСОБ КОНТРОЛЯ НАЛИЧИЯ ОТСЛОЕНИЙ АРМАТУРЫ В ЖЕЛЕЗОБЕТОННЫХ ИЗДЕЛИЯХ | 2006 |
|
RU2327136C1 |
| Способ виброакустического контроля тонкостенных изделий | 1988 |
|
SU1557517A1 |
| Устройство для виброакустического контроля длинномерных конструкций | 2017 |
|
RU2697025C2 |
| УСТРОЙСТВО ДЛЯ ВИБРОАКУСТИЧЕСКОГО КОНТРОЛЯ ДЛИННОМЕРНЫХ КОНСТРУКЦИЙ СЛОЖНОЙ ФОРМЫ | 2003 |
|
RU2241984C1 |
| СПОСОБ АКУСТИЧЕСКОГО КОНТРОЛЯ ТРУБОПРОВОДОВ | 2003 |
|
RU2247370C1 |
Изобретение относится к метрологии. Способ вибрационного контроля расположенных в труднодоступной среде стержней фермы, включающий возбуждение в стержне вынужденных упругих колебаний с изменяющейся частотой и регистрацию значения частоты его резонансных колебаний. В качестве возбуждаемого стержня выбирают один из легкодоступных для измерений и расположенный вне труднодоступной среды стержень верхнего пояса фермы, последовательно соединяют данный стержень жесткой фиксирующей и изогнутой заданным образом распоркой регулируемой длины со всеми контролируемыми стержнями нижних поясов и решеток фермы, расположенными в труднодоступной среде в зоне возможного осуществления их механического контакта с выбранным возбуждаемым стержнем, и осуществляют процесс замораживания участка труднодоступной среды, охватывающей соответствующий контролируемый стержень, при этом регистрируют вышеуказанным образом резонансную частоту возбуждаемого стержня для каждого соединения дважды до и после осуществления процесса замораживания, а о наличии дефекта в соответствующем контролируемом труднодоступном стержне судят по резкому увеличению резонансной частоты возбуждаемого стержня во втором измерении, после чего выбирают в качестве возбуждаемых другие легкодоступные стержни верхнего пояса фермы и повторяют аналогичным образом процесс контроля до охвата всей зоны расположения стержней в труднодоступной среде. Технический результат – повышение эффективности, точности измерений, снижение трудоемкости контроля. 1 ил.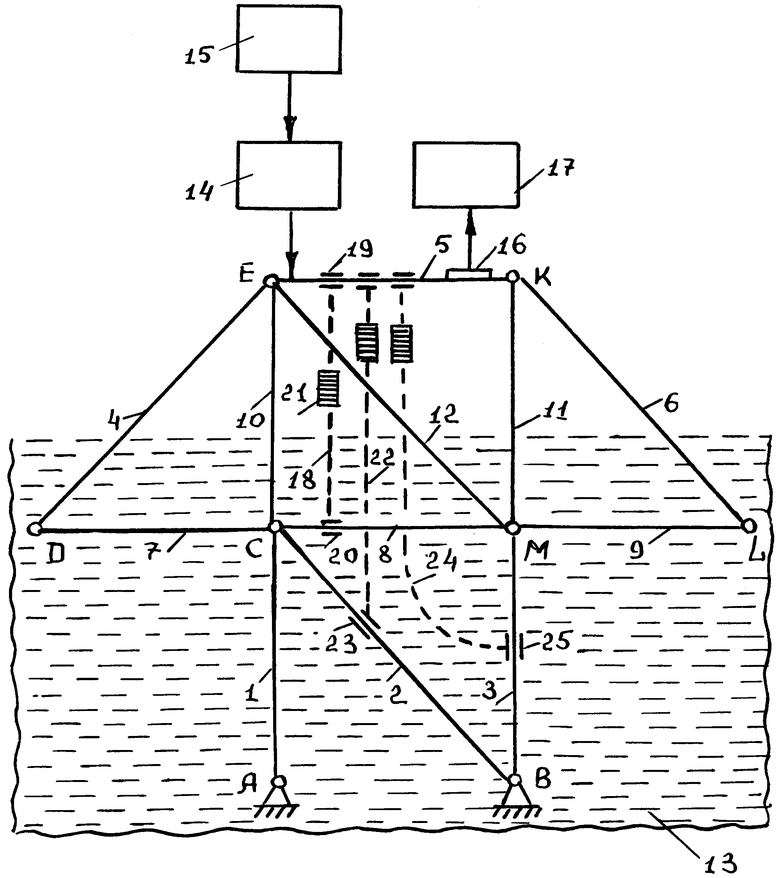
Способ вибрационного контроля расположенных в труднодоступной среде стержней фермы, включающий возбуждение в стержне вынужденных упругих колебаний с изменяющейся частотой и регистрацию значения частоты его резонансных колебаний, отличающийся тем, что в качестве возбуждаемого стержня выбирают один из легкодоступных для измерений и расположенный вне труднодоступной среды стержень верхнего пояса фермы, последовательно соединяют данный стержень жесткой фиксирующей и изогнутой заданным образом распоркой регулируемой длины со всеми контролируемыми стержнями нижних поясов и решеток фермы, расположенными в труднодоступной среде в зоне возможного осуществления их механического контакта с выбранным возбуждаемым стержнем, и осуществляют процесс замораживания участка труднодоступной среды, охватывающей соответствующий контролируемый стержень, при этом регистрируют вышеуказанным образом резонансную частоту возбуждаемого стержня для каждого соединения дважды до и после осуществления процесса замораживания, а о наличии дефекта в соответствующем контролируемом труднодоступном стержне судят по резкому увеличению резонансной частоты возбуждаемого стержня во втором измерении, после чего выбирают в качестве возбуждаемых другие легкодоступные стержни верхнего пояса фермы и повторяют аналогичным образом процесс контроля до охвата всей зоны расположения стержней в труднодоступной среде.
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| ТКАЦКИЙ СТАНОК | 1920 |
|
SU300A1 |
| Устройство для виброакустического контроля конструкций | 1977 |
|
SU690378A1 |
| Способ виброакустического контроля тонкостенных конструкций | 1986 |
|
SU1330547A1 |
| Способ виброакустического контроля изделий | 1985 |
|
SU1262365A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТИ ГОРИЗОНТАЛЬНОГО ШВА В ДВУХСЛОЙНЫХ КОНСТРУКЦИЯХ БАЛОЧНОГО ТИПА | 2009 |
|
RU2406075C1 |
| US 20050072234 A1, 07.04.2005. | |||

