Область техники изобретения
[0001] Настоящее изобретение относится к транспортировочному устройству, поднимающему и перемещающему штабелируемый коробчатый контейнер для транспортировки изделий, имеющий планарную форму в виде прямоугольного параллелограмма.
Уровень техники изобретения
[0002] В качестве примера транспортировочного устройства, способного поднимать/опускать и переносить коробчатый контейнер, известно, например, транспортировочное устройство для подъема/опускания контейнеров, в котором, как описано в патентной литературе 1, предусмотрено поднимающееся/опускающееся тело, подвешенное к подвижному телу типа мостового крана так, чтобы быть способным подниматься и опускаться, а также предусмотрены крюки для подвешивания контейнера, которые могли бы открываться и закрываться на нижней стороне поднимающегося/опускающегося тела. При использовании данного транспортировочного устройства на верхней поверхности контейнера выступает сцепленная металлическая арматура, способная входить в зацепление и выходить из зацепления с крюками для подвешивания контейнера, способными открываться/закрываться, либо под нижней поверхностью контейнера обеспечен зазор, с которым крюки для подвешивания контейнера могут входить в зацепление и расцепляться.
Список противопоставленных материалов
Патентная литература
[0003] Патентная литература 1: Опубликованная нерассмотренная патентная заявка Японии No. H06-115608
Сущность изобретения
Проблема, которую изобретение призвано решить
[0004] При конфигурации, описанной в вышеупомянутой патентной литературе 1, предварительное условие заключается в том, что сцепленная металлическая арматура, приспособленная для подвешивания, выступает из потолочной поверхности контейнера, представляющего собой транспортируемый объект, либо под нижней поверхностью контейнера образован зазор, при этом компактный пластиковый контейнер с открытой верхней стороной, который можно поднять и нести обеими руками, фактически не может использоваться в качестве транспортируемого объекта. Как правило, широко распространенный пластиковый контейнер имеет усиленный фланцевый участок, выполненный за одно целое и продолжающийся непрерывно параллельно периферийному направлению главным образом по верхней концевой стороне его внешней боковой поверхности в качестве средства усиления, при этом, хотя широко распространенный компактный пластиковый контейнер, такой как упомянут выше, имеющий открытую верхнюю сторону, таким образом, может быть сделан объектом транспортировки, используя подвесные крюки путем зацепления фланцевого участка на двух параллельных боковых поверхностях контейнера, среди контейнеров такого типа часто вперемешку используются такие, у которых разная высота, несмотря на одинаковые планарные размеры, при этом, поскольку высота от поверхности пола фланцевого участка, с которым должны зацепляться свисающие крюки, таким образом, не является фиксированной, свисающим крюком требуется управлять с высокой точностью в соответствии с высотой фланцевого участка контейнера, являющегося объектом обслуживания, что не является практичным решением.
Средство для решения проблем
[0005] В настоящем изобретении предложено транспортировочное устройство для подъема/опускания контейнеров, способное решить проблемы предшествующего уровня техники, такие, как указаны выше, и представлено описание путем предоставления ссылочных позиций в круглых скобках, используемых в описании приведенных ниже вариантов осуществления, чтобы способствовать пониманию связи с вариантами осуществления, при этом транспортировочное устройство для подъема/опускания контейнеров согласно настоящему изобретению имеет конфигурацию, при которой, по меньшей мере, два несущих поднимающихся/опускающихся тела (65A и 65B), взаимосвязанных соответственно с двумя параллельными боковыми поверхностями контейнера (C) для транспортировки изделий, имеющего планарную форму в виде прямоугольного параллелограмма, поддерживаются опорной конструкцией (вспомогательным перемещающимся телом (3)) так, чтобы быть способными подниматься и опускаться, а также быть способными перемещаться ближе друг к другу и дальше друг от друга, при этом к каждому из несущих поднимающихся/опускающихся тел (65A и 65B) прикреплены опорные блоки (67a), обращенные соответственно к двум параллельным боковым поверхностям контейнера (C), при этом в каждом из опорных блоков (67a) расположены и поддерживаются с соответствующими интервалами в вертикальном направлении пары пальцеобразных опорных приспособлений (76a и 76b), при этом каждая пара выступает в направлении стороны контейнера (C) в симметричных положениях по обеим сторонам вертикальной центральной линии каждой из двух параллельных боковых поверхностей контейнера (C), при этом каждое из пальцеобразных опорных приспособлений (76a и 76b) способно выдвигаться и отводиться назад, при этом принудительно приводится в выдвинутое положение и удерживается в нем пружиной (78), при этом пары пальцеобразных опорных приспособлений (76a), имеющих узкий интервал между собой, и пары пальцеобразных опорных приспособлений (76b), имеющих широкий интервал между собой, расположены поочередно в вертикальном направлении.
Эффекты изобретения
[0006] Используя в качестве опорной конструкции перемещающееся тело, способное совершать перемещение, или подвижный рычаг, качающийся горизонтально в пространстве над контейнером, требующим обслуживания, транспортировочное устройство для подъема/опускания контейнеров вышеописанной конфигурации может применяться в качестве средства для транспортировки контейнеров, способного перемещать и опускать поднятый контейнер в другое положение и на другое место в сопровождении действий перемещающегося тела или подвижного рычага. Кроме того, возможен также способ использования, при котором опорная конструкция устанавливается поверх фиксированного места, контейнер, перенесенный перемещающимся телом, осуществляющим транспортировку, в фиксированное место под опорной конструкцией, приподнимается, после чего контейнер опускается на другое перемещающееся тело, осуществляющее транспортировку, отправленное в это фиксированное место.
[0007] Используя транспортировочное устройство для подъема/опускания контейнеров вышеописанной конфигурации, вначале, по меньшей мере, два несущих поднимающихся/опускающихся тела снижаются в положения, латеральные по отношению к переносимому контейнеру, при этом в ходе этого процесса несущие поднимающиеся/опускающиеся тела снижаются в состоянии, в котором относительные положения на виде в плане соответствующих несущих поднимающихся/опускающихся тел и подлежащий переносу контейнер расположены так, что центральная линия симметрии каждой пары пальцеобразных опорных приспособлений, которыми опорные блоки обладают на множестве расположенных по вертикали ярусов, по существу перекрывается с вертикальными центральными линиями боковых поверхностей контейнера. После опускания соответствующие несущие поднимающиеся/опускающиеся тела горизонтально перемещаются соответственно ближе к двум параллельным боковым поверхностям подлежащего переносу контейнера, и опорные блоки занимают смежное положение с фланцевыми участками на боковых поверхностях контейнера. Следовательно, из числа пальцеобразных опорных приспособлений на множестве расположенных по вертикали ярусов, которыми обладают соответствующие опорные блоки, пальцеобразные опорные приспособления, находящиеся в положениях соприкосновения с фланцевым участком боковых поверхностей контейнера, соответственно отводятся назад в направлении соответствующих сторон опорных блоков и удерживаются в состоянии контакта с фланцевым участком боковых поверхностей контейнера, преодолевая толкающую силу пружин, а все другие пальцеобразные опорные приспособления в выдвинутом состоянии вводятся в пространство над и под фланцевым участком боковых поверхностей контейнера. Путем последующего перемещения соответствующих несущих поднимающихся/опускающихся тел вверх в этом состоянии, пары пальцеобразных опорных приспособлений, которые, из числа пальцеобразных опорных приспособлений соответствующих опорных блоков, расположены на той же высоте непосредственно под фланцевым участком боковых поверхностей контейнера, вынужденно поднимают посредством фланцевого участка подлежащий переносу контейнер. Когда подлежащий переносу контейнер поднят на заданную высоту, опорная конструкция, поддерживающая соответствующие несущие поднимающиеся/опускающиеся тела, совершает необходимое перемещение, после чего подлежащий переносу контейнер может быть опущен в заданное место путем опускания и перемещения соответствующих несущих поднимающихся/опускающихся тел в направлениях бокового отделения от контейнера, выполняя действия, обратные описанным выше.
[0008] Подлежащий переносу контейнер, таким образом, может быть поднят и перенесен, при этом, используя вышеописанную конфигурацию по настоящему изобретению, нет необходимости управлять опусканием каждого несущего поднимающегося/опускающегося тела так, чтобы единственное пальцеобразное опорное приспособление (пара), которым обладает несущее поднимающееся/опускающееся тело, соответствовало положению непосредственно под конкретным фланцевым участком подлежащего переносу контейнера, при этом достаточно создать область, которая велика в вертикальном направлении и включает в себя пальцеобразные опорные приспособления на множестве расположенных по вертикали ярусов опорного блока несущего поднимающегося/опускающегося тела, которые соответствуют фланцевому участку подлежащего переносу контейнера, что делает управление поднятием/опусканием несущего поднимающегося/опускающегося тела чрезвычайно простым. Кроме того, симметричные места по обеим сторонам каждой из вертикальных центральных линий, по меньшей мере, двух параллельных боковых поверхностей подлежащего переносу контейнера соответственно поддерживаются пальцеобразными опорными приспособлениями, чтобы позволить поднять контейнер, сохраняя устойчивость в горизонтальном положении.
[0009] Помимо этого, при использовании соответствующих пар пальцеобразных опорных приспособлений (76a и 76b) на множестве расположенных по вертикали ярусов, пары пальцеобразных опорных приспособлений (76a), имеющих узкий интервал между собой, и пары пальцеобразных опорных приспособлений (76b), имеющих широкий интервал между собой, расположены поочередно, а потому имеется возможность для создания конфигурации, при которой каждая из пар пальцеобразных опорных приспособлений (76b), имеющих широкий интервал между собой, расположена на высоте по центру вертикального интервала между парами пальцеобразных опорных приспособлений (76a), имеющих узкий интервал между собой, так чтобы пары пальцеобразных опорных приспособлений (76b), имеющих широкий интервал между собой, и пары пальцеобразных опорных приспособлений (76a), имеющих узкий интервал между собой, накладывались друг на друга на виде сбоку. При такой конфигурации шаг в вертикальном направлении, с которым фланцевый участок контейнера может поддерживаться, можно сделать малым, задав при этом толщину каждого пальцеобразного опорного приспособления так, чтобы она была достаточной с точки зрения выдерживания нагрузки, при этом расстояние, на которое несущие поднимающиеся/опускающиеся тела поднимаются, пока подлежащий переносу контейнер не будет поднят пальцеобразными опорными приспособлениями, таким образом, можно сделать меньше толщины каждого пальцеобразного опорного приспособления.
[0010] При реализации настоящего изобретения, описанного выше, соответствующие несущие поднимающиеся/опускающиеся тела (65A и 65B) могут быть оборудованы вертикальными стержнеобразнымстержнеобразными основными телами (66), поддерживаемыми опорной конструкцией (вспомогательным перемещающимся телом (3)) так, чтобы быть способными подниматься и опускаться, а также быть способными перемещаться ближе друг к другу и дальше друг от друга, при этом каждый опорный блок (67a) может быть выполнен с возможностью подниматься и опускаться относительно соответствующего вертикального стержнеобразного основного тела (66) и поддерживаться в фиксированном положении по высоте вертикального стержнеобразного основного тела (66). При такой конфигурации, даже если, в случае, когда подлежащий переносу контейнер опущен и установлен поверх другого контейнера, положение остановки опускания несущих поднимающихся/опускающихся тел становится чуть ниже, чем требуется, опорные блоки просто приводятся в состояние сцепления посредством пальцеобразных опорных приспособлений с фланцевым участком опущенного контейнера, так что проблемы оказания давления на фланцевый участок со стороны других пальцеобразных опорных приспособлений, расположенных непосредственно над фланцевым участком опущенного контейнера, не возникает, как в случае, когда опорные блоки принудительно опускаются заодно целое с несущими поднимающимися/опускающимися телам, а значит, управление поднятием/опусканием несущих поднимающихся/опускающихся тел упрощается, при этом повреждения фланцевого участка контейнера и пальцеобразных опорных приспособлений можно избежать.
[0011] Конструкция каждого опорного блока, включающего в себя пальцеобразные опорные приспособления, может иметь любую конфигурацию, при условии, что каждое пальцеобразное опорное приспособление поддерживается так, чтобы обеспечить возможность выдвижения и отведения назад, при этом принудительно приводится в выдвинутое положение и удерживается в нем пружиной, в частности, для каждого из опорных блоков (67a и 67b) его корпус (75), поддерживающий пальцеобразные опорные приспособления (76a и 76b) так, чтобы обеспечить возможность выдвижения и отведения назад, и имеющий установленные внутри него пружины (78), может иметь конструкцию, в которой соответствующие пары пальцеобразных опорных приспособлений (76a и 76b) распределены и поддерживаются по обеим сторонам соответствующего вертикального основного тела (66), при этом может быть выполнен так, что вертикальное стержнеобразное основное тело (66), направляющий рельс скольжения (71), уложенный на обращенной к контейнеру поверхности вертикального стержнеобразного основного тела (66), а также скользящий блок (71a или 71b), прикрепленный к корпусу (75) так, чтобы соответствовать направляющему рельсу скольжения (71), введены на внутреннюю сторону корпуса (75) на виде сбоку. При такой конфигурации, если сравнивать с конфигурацией, при которой опорный блок в полном объеме выступает к стороне контейнера относительно вертикального стержнеобразного основного тела, не только вся конструкция в совокупности может быть отконфигурирована компактно, но и дистальный участок каждого пальцеобразного опорного приспособления, поддерживающего фланцевый участок контейнера, становится ближе к вертикальному стержнеобразномстержнеобразному основному телу на виде сбоку, что позволяет снизить нагрузки, действующие на каждое пальцеобразное опорное приспособление, корпус опорного блока и т.д.
[0012] Кроме того, каждое несущее поднимающееся/опускающееся тело (65A или 65B) может быть выполнено с возможностью поддерживать множество опорных блоков (67a и 67b) через соответствующий интервал в вертикальном направлении. При такой конфигурации, даже если большое количество контейнеров, подлежащих переносу, уложены в штабель, контейнер на самом нижнем конце, смежном с опорным блоком на нижней стороне, а также контейнер на промежуточной высоте или самом верхнем конце, смежном с опорным блоком на более высокой стороне, соответственно могут поддерживаться отдельно от других из всей совокупности штабелированных контейнеров, что позволяет поднять и перенести всю совокупность штабелированных контейнеров безопасным образом с сохранением высокой устойчивости. Кроме того, максимальные нагрузки, прикладываемые к пальцеобразным опорным приспособлениям опорных блоков, можно уменьшить, чтобы позволить создать опорные блоки, в состав которых входят пальцеобразные опорные приспособления, легковесными и малозатратными.
Краткое описание чертежей
[0013] [Фиг. 1] На Фиг. 1 показан вид сверху, иллюстрирующий складское хозяйство.
[Фиг. 2] На Фиг. 2 показан вид спереди того же складского хозяйства.
[Фиг. 3] На Фиг. 3 показан вид сбоку того же складского хозяйства.
[Фиг. 4] На Фиг. 4A показан вид сзади, частично в разрезе, иллюстрирующий главные подвижные основания на вспомогательном перемещающемся теле, а на Фиг. 4B показан их вид сбоку.
[Фиг. 5] На Фиг. 5 показан вид сверху, частично в разрезе, иллюстрирующий главное перемещающееся тело.
[Фиг. 6] На Фиг. 6 показан вид сверху, иллюстрирующий вспомогательное перемещающееся тело на главном перемещающемся теле.
[Фиг. 7] На Фиг. 7A показан вид спереди, иллюстрирующий вспомогательное перемещающееся тело, а на Фиг. 7B показан частичный вид в продольном разрезе, иллюстрирующий то же вспомогательное перемещающееся тело.
[Фиг. 8] На Фиг. 8 показан вид сверху, иллюстрирующий детальную конструкцию на вспомогательном перемещающемся теле.
[Фиг. 9] На Фиг. 9 показан вид сверху, иллюстрирующий пару главных подвижных оснований в X-направлении, поддерживаемых на вспомогательном перемещающемся теле.
[Фиг. 10] На Фиг. 10 показан вид сверху, иллюстрирующий пару главных подвижных оснований в X-направлении, а также пару вспомогательных подвижных оснований в Y-направлении, поддерживаемых на каждом из главных подвижных оснований.
[Фиг. 11] На Фиг. 11A показан вид спереди, частично в разрезе, иллюстрирующий работающее в X-направлении приводное средство, приводящее в движение главные подвижные основания, а на Фиг. 11B показан вид спереди, иллюстрирующий приводное средство поднятия/опускания, установленное на главных подвижных основаниях.
[Фиг. 12] На Фиг. 12 показан вид сбоку, иллюстрирующий работающее в Y-направлении приводное средство, приводящее в движение вспомогательные подвижные основания.
[Фиг. 13] На Фиг. 13 показан вид сбоку, иллюстрирующий вспомогательные подвижные основания, а также приводное средство поднятия/опускания, поддерживаемое на главном подвижном основании с одной стороны.
[Фиг. 14] На Фиг. 14 показан вид сверху, иллюстрирующий опорную конструкцию четырех захватных поднимающихся/опускающихся тел.
[Фиг. 15] На Фиг. 15 показан частичный вид сверху в поперечном разрезе, представляющий состояние, в котором четыре захватных поднимающихся/опускающихся тела подведены максимально близко к центру захватной области контейнера.
[Фиг. 16] На Фиг. 16 показан вид спереди, иллюстрирующий состояние, в котором пара захватных поднимающихся/опускающихся тел в X-направлении отделены на максимальное расстояние друг от друга.
[Фиг. 17] На Фиг. 17 показан вид спереди, иллюстрирующий состояние, в котором пара захватных поднимающихся/опускающихся тел в X-направлении подведены максимально близко друг к другу.
[Фиг. 18] На Фиг. 18 показан вид сбоку, иллюстрирующий пару захватных поднимающихся/опускающихся тел в Y-направлении в состоянии отделения на максимальное расстояние, при этом несущее поднимающееся/опускающееся тело находится в своем промежуточном положении.
[Фиг. 19] На Фиг. 19 показан вид сбоку, иллюстрирующий пару захватных поднимающихся/опускающихся тел в Y-направлении в состоянии приведения максимально близко друг к другу, при этом несущее поднимающееся/опускающееся тело находится в своем промежуточном положении.
[Фиг. 20] На Фиг. 20A показан частичный вид сверху в поперечном разрезе, иллюстрирующий состояние, в котором четыре захватных поднимающихся/опускающихся тела и пара несущих поднимающихся/опускающихся тел в X-направлении отделены на максимальное расстояние друг от друга, а на Фиг. 20B показан частичный вид сверху в поперечном разрезе, иллюстрирующий состояние, в котором четыре захватных поднимающихся/опускающихся тела и пара несущих поднимающихся/опускающихся тел в X-направлении подведены максимально близко друг к другу.
[Фиг. 21] На Фиг. 21A показан частичный вид спереди в продольном разрезе, иллюстрирующий одно одиночное несущее поднимающееся/опускающееся тело и одиночное захватное поднимающееся/опускающееся тело на одной и той же стороне, а на Фиг. 21B показан частичный вид спереди в продольном разрезе, иллюстрирующий другое одиночное несущее поднимающееся/опускающееся тело и одиночное захватное поднимающееся/опускающееся тело на одной и той же стороне.
[Фиг. 22] На Фиг. 22A показан увеличенный вид спереди, иллюстрирующий опорный блок нижней стороны, входящий в состав несущего поднимающегося/опускающегося тела, на Фиг. 22B показан его вид сбоку, на Фиг. 22C показан его вид сверху в поперечном разрезе, а на Фиг. 22D показан увеличенный вид сбоку в продольном разрезе его существенных частей.
[Фиг. 23] На Фиг. 23 показан частичный вид сверху в поперечном разрезе, иллюстрирующий состояние, в котором контейнер захвачен и поднят/опущен четырьмя захватными поднимающимися/опускающимися телами и парой несущих поднимающихся/опускающихся тел в X-направлении.
[Фиг. 24] На Фиг. 24 показан вид спереди в продольном разрезе для описания действий несущих поднимающихся/опускающихся тел в отношении контейнера, при этом на левой половине показано состояние непосредственно перед тем, как контейнер поднят вверх, а на правой половине показано состояние непосредственно после того, как контейнер поднят вверх.
[Фиг. 25] На Фиг. 25 показан частичный вид сбоку в продольном разрезе, иллюстрирующий состояние, в котором контейнер поднят и перенесен несущими поднимающимися/опускающимися телами.
Способы осуществления изобретения
[0014] На Фиг. 1 - Фиг. 3 1 - транспортировочное устройство типа мостового крана, установленное на верхней стороне складского участка, выполненного в виде плоской поверхности пола, имеющей планарную форму в виде прямоугольного параллелограмма. Транспортировочное устройство 1 включает в себя главное перемещающееся тело 2, способное перемещаться в Y-направлении (направлении по глубине вперед/назад) на горизонтальной плоскости, а также вспомогательное перемещающееся тело 3, удерживаемое над главным перемещающимся телом 2 так, чтобы обеспечивалась возможность перемещения в горизонтально-ориентированном X-направлении (направлении по ширине вправо/влево) под прямым углом к направлению перемещения главного перемещающегося тела 2. Прямоугольная рамочная конструкция 4, окружающая складской участок, горизонтально установлена поверх складского участка на фиксированной высоте над поверхностью пола с помощью звеньев-стоек 5, при этом соответствующие концевые участки главного перемещающегося тела 2 опираются, так, чтобы обеспечивалась возможность перемещения в Y-направлении, на набор балочных звеньев 4a и 4b прямоугольной рамочной конструкции 4, параллельных Y-направлению. Главное перемещающееся тело 2 имеет пару боковых рам 2a и 2b, длина которых перекрывает полностью длину в X-направлении, расположенных параллельно с соответствующем интервалом в их направлении перемещения (Y-направлении), при этом соответствующие боковые края вспомогательного перемещающегося тела 3 опираются, так, чтобы обеспечивалась возможность перемещения в X-направлении, на соответствующие боковые рамы 2a и 2b.
[0015] Транспортер-накопитель 6 и извлекающий транспортер 7 расположены смежно со складским участком. Осуществляющие перенос концевые участки 6a и 7a на сторонах складского участка, принадлежащие соответствующим транспортерам 6 и 7, заходят на складской участок, при этом путем перемещения в Y-направлении главного перемещающегося тела 2 на балочных звеньях 4a и 4b прямоугольной рамочной конструкции 4 и перемещения в X-направлении вспомогательного перемещающегося тела 3 на боковых рамах 2a и 2b главного перемещающегося тела 2 вспомогательное перемещающееся тело 3 можно расположить непосредственно над любой точкой по всей площади внутри складского участка, окруженного прямоугольной рамочной конструкцией 4, в том числе осуществляющими перенос концевыми участками 6a и 7a накопительного и извлекающего транспортеров 6 и 7.
[0016] Как показано на Фиг. 4 и на Фиг. 5, главное перемещающееся тело 2 имеет кареточные участки 8a и 8b, опирающиеся на балочные звенья 4a и 4b так, чтобы обеспечить возможность перемещения в направлении длины балочных звеньев 4a и 4b, при этом пара боковых рам 2a и 2b опираются на кареточные участки 8a и 8b, причем каждый из кареточных участков 8a и 8b оборудован множеством колес 9, катящихся по соответствующему балочному звену 4a или 4b, а также позиционирующих роликов 10, охватывающих балочное звено 4a или 4b с правой и левой сторон. На соответствующих балочных звеньях 4a и 4b натянуты ремни синхронизации 11a и 11b, так чтобы обеспечить возможность вращения вдоль балочных звеньев 4a и 4b, оба конца каждого из ремней синхронизации 11a и 11b прикреплены к соответствующему кареточному участку 8a или 8b, при этом с помощью каждого из ремней синхронизации 11a и 11b один из шкивов, который его натягивает, взаимно соединен с одинарным двигателем 13 через передаточный вал 12 для создания конфигурации, при которой оба ремня синхронизации 11a и 11b приводятся в движении, чтобы синхронно вращаться двигателем 13 с целью возвратно-поступательного перемещения главного перемещающегося тела 2 параллельно Y-направлению.
[0017] На боковой раме 2a с одной стороны главного перемещающегося тела 2 ремень синхронизации 14 натянут так, чтобы обеспечить возможность вращения вдоль боковой рамы 2a, при этом смежно расположен двигатель 15, приводящий ремень синхронизации 14 во вращение. Как показано на Фиг. 6 и на Фиг. 7, вспомогательное перемещающееся тело 3 выполнено из пары боковых рам 3a и 3b, расположенных параллельно боковым рамам 2a и 2b главного перемещающегося тела 2 на верхней стороне боковых рам 2a и 2b, а также пары соединительных рам 3c и 3d, соединяющих и объединяющих обе боковые рамы 3a и 3b друг с другом, при этом на боковых рамах 3a и 3b поддерживаются с возможностью вращения множество колес 16, катящихся по боковым рамам 2a и 2b главного перемещающегося тела 2, при этом несущие плиты 18a и 18b, каждая из которых поддерживает с возможностью вращения пару роликов 17, между которыми помещена боковая рама 2a главного перемещающегося тела 2, крепятся в положениях вблизи соответствующих концов боковой рамы 3a на одной стороне. Соответствующие концы ремней синхронизации 14 прикреплены к несущим плитам 18a и 18b, при этом путем приведения ремня синхронизации 14 во вращение с помощью двигателя 15 вспомогательное перемещающееся тело 3 может приводиться в возвратно-поступательное движение в X-направлении.
[0018] При вышеописанной конфигурации путем приведения в работу двигателя 13 для перемещения главного перемещающегося тела 2 в Y-направлении совместно с приведением в работу двигателя 15 на главном перемещающемся теле 2 для перемещения вспомогательного перемещающегося тела 3 в X-направлении на главном перемещающемся теле 2 вспомогательное перемещающееся тело 3 можно расположить непосредственно над любой точкой складского участка прямоугольной планарной формы, окруженного прямоугольной рамочной конструкцией 4.
[0019] Как показано на Фиг. 8 - Фиг. 10, вспомогательное перемещающееся тело 3 имеет пару главных подвижных оснований 21a и 21b, выполненных с возможностью перемещаться ближе друг к другу и дальше друг от друга в X-направлении, установленных посредством направляющих рельсов 20a и 20b, закрепленных на боковых рамах 3a и 3b, и скользящих блоков 19a и 19b, приспособленных к направляющим рельсам 20a и 20b, а также имеет расположенное смежно работающее в X-направлении приводное средство 22 для перемещения пары главных подвижных оснований 21a и 21b ближе друг к другу и дальше друг от друга синхронно в X-направлении. Работающее в X-направлении приводное средство 22 выполнено из пары ремней синхронизации 23a и 23b, натянутых на наружных сторонах боковых рам 3a и 3b вспомогательного перемещающегося тела 3, так чтобы обеспечить возможность вращения вдоль боковых рам 3a и 3b, и двигателя 26, взаимно соединенного с обоими ремнями синхронизации 23a и 23b через передаточный вал 24 и средство 25 ременной передачи и установленного на вспомогательном перемещающемся теле 3, при этом верхние путевые участки соответствующих ремней синхронизации 23a и 23b соединены посредством соединительных звеньев 27a и 27b с соответствующими концами одного главного подвижного основания 21a, а нижние путевые участки соответствующих ремней синхронизации 23a и 23b соединены посредством соединительных звеньев 28a и 28b с соответствующими концами другого главного подвижного основания 21b. При такой конфигурации работающего в X-направлении приводного средства 22 пара главных подвижных оснований 21a и 21b могут приводиться в движение друг к другу путем приведения обоих ремней синхронизации 23a и 23b во вращение в переднем направлении с помощью двигателя 26, а также пара главных подвижных оснований 21a и 21b могут приводиться в движение друг от друга путем приведения обоих ремней синхронизации 23a и 23b во вращение в обратном направлении с помощью двигателя 26.
[0020] Как показано на Фиг. 10 - Фиг. 12, на каждом из пары главных подвижных оснований 21a и 21b предусмотрена пара вспомогательных подвижных оснований 30a и 30b или 31a и 31b, способных перемещаться в Y-направлении посредством направляющего рельса 29a или 29b, уложенного параллельно Y-направлению на главном подвижном основании 21a или 21b. Среди вспомогательных подвижных оснований 30a - 31b пара вспомогательных подвижных оснований 30a и 31b в X-направлении, расположенных на одной и той же стороне в Y-направлении, поддерживаются так, чтобы обеспечить возможность перемещения в X-направлении на взаимосвязывающем стержнеобразном теле 32a, расположенном параллельно X-направлению на наружной стороне вспомогательных подвижных оснований 30a и 31b, посредством направляющего рельса 33a, уложенного на взаимосвязывающем стержнеобразном теле 32a, и скользящих блоков 34a и 35a, приспособленных к направляющему рельсу 33a, а другая пара вспомогательных подвижных оснований 30b и 31a в X-направлении поддерживается так, чтобы обеспечить возможность перемещения в X-направлении на взаимосвязывающем стержнеобразном теле 32b, расположенном параллельно X-направлению на наружной стороне вспомогательных подвижных оснований 30b и 31a, посредством направляющего рельса 33b, уложенного на взаимосвязывающем стержнеобразном теле 32b, и скользящих блоков 34b и 35b, приспособленных к направляющему рельсу 33b.
[0021] Пара взаимосвязывающих стержнеобразных тел 32a и 32b сближаются друг с другом и удаляются друг от друга в Y-направлении с помощью работающего в Y-направлении приводного средства 36. Работающее в Y-направлении приводное средство 36 выполнено из пары ремней синхронизации 37a и 37b, натянутых параллельно вспомогательному перемещающемуся телу 3 и Y-направлению на наружных сторонах пары взаимосвязывающих стержнеобразных тел 32a и 32b, а также двигателя 40, приводящего оба ремня синхронизации 37a и 37b во вращение через передаточный вал 38 и средство 39 ременной передачи и установленного на вспомогательном перемещающемся теле 3. Верхние путевые участки ремней синхронизации 37a и 37b соединены посредством соединительных звеньев 41a и 41b с соответствующими концами одного соединительного стержнеобразного тела 32a, а нижние путевые участки соответствующих ремней синхронизации 37a и 37b соединены посредством соединительных звеньев 42a и 42b с соответствующими концами другого взаимосвязывающего стержнеобразного тела 32b. При такой конфигурации работающего в Y-направлении приводного средства 36 пара взаимосвязывающих стержнеобразных тел 32a и 32b могут приводиться в движение друг к другу в Y-направлении путем приведения обоих ремней синхронизации 37a и 37b во вращение в переднем направлении с помощью двигателя 40, а также пара взаимосвязывающих стержнеобразных тел 32a и 32b могут приводиться в движение друг от друга в Y-направлении путем приведения обоих ремней синхронизации 37a и 37b во вращение в обратном направлении с помощью двигателя 40. Когда пара взаимосвязывающих стержнеобразных тел 32a и 32b сближаются друг с другом, пара вспомогательных подвижных оснований 30a и 30b в Y-направлении, поддерживаемых на главном подвижном основании 21a, сближаются друг с другом, при этом одновременно пара вспомогательных подвижных оснований 31a и 31b в Y-направлении, поддерживаемых на главном подвижном основании 21b, сближаются друг с другом. Наоборот, когда пара взаимосвязывающих стержнеобразных тел 32a и 32b удаляются друг от друга, пара вспомогательных подвижных оснований 30a и 30b в Y-направлении, поддерживаемых на главном подвижном основании 21a, удаляются друг от друга, при этом одновременно пара вспомогательных подвижных оснований 31a и 31b в Y-направлении, поддерживаемых на главном подвижном основании 21b, удаляются друг от друга. В любом случае интервал между парой вспомогательных подвижных оснований 30a и 31b в X-направлении, взаимосвязанных с взаимосвязывающим стержнеобразным телом 32a, и интервал между парой вспомогательных подвижных оснований 30b и 31a в X-направлении, взаимосвязанных с взаимосвязывающим стержнеобразным телом 32b, соответственно поддерживаются равными интервалу между главными подвижными основаниями 21a и 21b.
[0022] Как показано на Фиг. 10 и на Фиг. 11B, опорные звенья 43a, 43b, 44a и 44b в форме перевернутой буквы L, продолжающиеся вниз на внутренних сторонах в X-направлении, соответственно установлены на четырех вспомогательных подвижных основаниях 30a, 30b, 31a и 31b, при этом захватные поднимающиеся/опускающиеся тела 45a - 46b соответственно установлены на внутренних сторонах вертикальных участков соответствующих опорных звеньев 43a - 44b. Каждое из захватных поднимающихся/опускающихся тел 45a - 46b образовано стержнеобразным звеном, которое является удлиненным в вертикальном направлении и включает в себя соединительный участок 47, имеющий поперечное сечение в форме угла по всей длине в вертикальном направлении. Как показано на Фиг. 23, соединительные участки 47 расположены в ориентационных положениях, обеспечивающих возможность согласования соответственно с четырьмя углами подлежащего переносу контейнера C, и имеют препятствующие скольжению полосообразные тела 48, прикрепленные так, чтобы непрерывно продолжаться по всей длине до внешних боковых краев прямоугольных внутренних боковых поверхностей, обращенных к контейнеру C. Для каждого из захватных поднимающихся/опускающихся тел 45a - 46b поднимающий/опускающий направляющий рельс 49, являющийся непрерывным по всей длине, прикреплен к наружной стороне расположенного в X-направлении участка плиты параллельно X-направлению, при этом скользящие блоки 50, приспособленные к поднимающим/опускающим направляющим рельсам 49 и поддерживающие соответствующие захватные поднимающиеся/опускающиеся тела 45a - 46b, чтобы придать способность подниматься и опускаться, прикреплены к внутренним сторонам вертикальных участков соответствующих опорных звеньев 43a - 44b.
[0023] Как показано на Фиг. 14 и на Фиг. 18, верхние концевые участки захватных поднимающихся/опускающихся тел 45a и 45b, расположенных параллельно в Y-направлении, соединены с помощью соединительного средства 51A так, чтобы обеспечить возможность сближаться друг с другом и расходиться друг от друга в Y-направлении, при этом верхние концевые участки захватных поднимающихся/опускающихся тел 46a и 46b, расположенных параллельно в Y-направлении, соединены с помощью соединительного средства 51B так, чтобы обеспечить возможность сближаться друг с другом и расходиться друг от друга в Y-направлении. Два соединительных средства 51A и 51B представляют собой конструкции, обладающие взаимной точечной симметрией на виде в плане, направляющие рельсы скольжения 53 и 54 крепятся параллельно Y-направлению к поверхности верхней стороны и внутренней боковой поверхности каждого квадратного колонного звена 52, являющегося удлиненным в Y-направлении, L-образные опорные плиты 55, поддерживающие верхние концы захватных поднимающихся/опускающихся тел 45a и 46b, установлены на скользящих блоках 53a, приспособленных к направляющим рельсам скольжения 53 с верхней стороны, а опорные плиты 56, поддерживающие верхние концы захватных поднимающихся/опускающихся тел 45b и 46b, установлены на скользящих блоках 54a, приспособленных к направляющим рельсам скольжения 54 с внутренней стороны.
[0024] Верхние концы захватных поднимающихся/опускающихся тел 45a и 46a и L-образные опорные плиты 55 соединены на внутренних сторонах верхних концов расположенных в Y-направлении участков плит, параллельных Y-направлению, захватных поднимающихся/опускающихся тел 45a и 46b и наружных концевых участках вертикальных участков 55a L-образных опорных плит 55 с помощью поворотных шкворней 55b, параллельных X-направлению, которые примыкают к внутренним сторонам расположенных в Х-направлении участков плит захватных поднимающихся/опускающихся тел 45a и 46b. Верхние концы захватных поднимающихся/опускающихся тел 45b и 46b и опорные плиты 56 соединены на внутренних сторонах верхних концов расположенных в Y-направлении участков плит захватных поднимающихся/опускающихся тел 45b и 46b и наружных концевых участках опорных плит 56 с помощью поворотных шкворней 56a, параллельных X-направлению, которые примыкают к внутренним сторонам расположенных в Х-направлении участков плит захватных поднимающихся/опускающихся тел 45b и 46b. Таким образом, создана конфигурация, при которой, как показано на Фиг. 15, когда расположенная в Y-направлении пара захватных поднимающихся/опускающихся тел 45a и 45b сближаются друг с другом в Y-направлении и расположенная в Y-направлении пара поднимающихся/опускающихся тел 46a и 46b сближаются друг с другом в Y-направлении, опорные плиты 56, поддерживающие захватные поднимающиеся/опускающиеся тела 45b и 46b, и скользящие блоки 54a, поддерживающие эти плиты, заходят на внутренние стороны вертикальных участков 55a L-образных опорных плит 55, поддерживающих захватные поднимающиеся/опускающиеся тела 45a и 46b, чтобы обеспечить возможность расположенной в Y-направлении паре захватных поднимающихся/опускающихся тел 45a и 45b приблизиться друг к другу до состояния расположения глубже внутрь, чем соответствующие расположенные в Y-направлении концы квадратного колонного звена 52 на виде в плане, и расположенной в Y-направлении паре поднимающихся/опускающихся тел 46a и 46b приблизиться друг к другу до состояния расположения глубже внутрь, чем соответствующие расположенные в Y-направлении концы квадратного колонного звена 52 на виде в плане.
[0025] Благодаря вышеописанной конфигурации одна расположенная в Y-направлении пара захватных поднимающихся/опускающихся тел 45a и 45b и соединительное средство 51A, расположенное между их верхними концевыми участками, выполнены с возможностью подниматься и опускаться как единое целое относительно опорных звеньев 43a и 43b (вспомогательных подвижных оснований 30a и 30b), поддерживающих захватные поднимающиеся/опускающиеся тела 45a и 45b, а другая расположенная в Y-направлении пара поднимающихся/опускающихся тел 46a и 46b и соединительное средство 51B, расположенное между их верхними концевыми участками, выполнены с возможностью подниматься и опускаться как единое целое относительно опорных звеньев 44a и 44b (вспомогательных подвижных оснований 31a и 31b), поддерживающих захватные поднимающиеся/опускающиеся тела 46a и 46b.
[0026] Как показано на Фиг. 9, приводное средство поднятия/опускания 57A, управляющее поднятием и опусканием захватных поднимающихся/опускающихся тел 45a и 45b и соединительного средства 51A, установлено на центральном участке нижней стороны главного подвижного основания 21a, а приводное средство поднятия/опускания 57B, управляющее поднятием и опусканием захватных поднимающихся/опускающихся тел 46a и 46b и соединительного средства 51B, установлено на центральном участке нижней стороны главного подвижного основания 21b. Эти два приводных средств поднятия/опускания 57A и 57B представляют собой конструкции, обладающие взаимной точечной симметрией на виде в плане, показанном на Фиг. 9, при этом, как показано на Фиг. 9, на Фиг. 11B, на Фиг. 13 и на Фиг. 14, каждое включает в себя расположенную в Y-направлении пару, состоящую из главной опорной плиты 58a и вспомогательной опорной плиты 58b, расположенную в Y-направлении пару приводных шкивов 60a и 60b, которые поддерживаются с возможностью вращения на общем приводном валу 59 между главной и вспомогательной опорными плитами 58a и 58b, оснащенный тормозом двигатель 61, поддерживаемый главной опорной плитой 58a и взаимно соединенный с приводными шкивами 60a и 60b через общий приводной вал 59 и передаточный ремень 59a, пару, состоящую из верхнего и нижнего направляющих шкивов 62a и 62b, поддерживаемых с возможностью поворота каждой вспомогательной опорной плитой 58b и расположенных над и под внутренней стороной приводного шкива 60a, пару, состоящую из верхнего и нижнего направляющих шкивов 63a и 63b, поддерживаемых с возможностью поворота главной опорной плитой 58a и расположенных над и под внутренней стороной приводного шкива 60b, а также расположенную в Y-направлении пару поднимающих/опускающих приводных ремней синхронизации 64a и 64b.
[0027] Как показано на Фиг. 23, несущее поднимающееся/опускающееся тело 65A установлено между захватными поднимающимися/опускающимися телами 45a и 45b, расположенными параллельно в Y-направлении, а несущее поднимающееся/опускающееся тело 65B установлено между захватными поднимающимися/опускающимися телами 46a и 46b, расположенными по одной линии в Y-направлении. Соответствующие несущие поднимающиеся/опускающиеся тела 65A и 65B имеют взаимно симметричную конструкцию в X-направлении, при этом, как показано на Фиг. 18, каждое образовано вертикальным стержнеобразным основным телом 66, длина которого по существу равна длине захватных поднимающихся/опускающихся тел 45a - 46b, и двумя опорными блоками 67a и 67b верхнего и нижнего яруса, установленными на вертикальном стержнеобразном основном теле 66. Верхний концевой участок вертикального стержнеобразного основного тела 66 посредством установочных плит 66a соединен с центральной точкой по длине в Y-направлении квадратного колонного звена 52 соответствующего соединительного средства 51A или 51B, а его плита 68 ременной связки в форме плоской пластины, удлиненной в Y-направлении, установлена в форме перевернутой буквы T на его нижнем конце.
[0028] Поднимающие/опускающие приводные ремни синхронизации 64a и 64b каждого из приводных средств поднятия/опускания 57A и 57B расположены симметрично на соответствующих сторонах в Y-направлении вертикального стержнеобразного основного тела 66 соответствующего несущего поднимающегося/опускающегося тела 65A или 65B, при этом одни их концы соответственно соединены посредством звеньев 69 установки ремней с внешними боковыми поверхностями соответствующих концевых участков по длине в Y-направлении квадратного колонного звена 52, другие их концы соответственно соединены посредством звеньев 70 установки ремней с верхними сторонами соответствующих концевых участков по длине в Y-направлении плиты 68 ременной связки, при этом, как показано на Фиг. 16, для каждого из приводных средств поднятия/опускания 57A и 57B, промежуточный участок поднимающего/опускающего приводного ремня синхронизации 64a намотан вокруг приводного шкива 60a посредством пары верхнего и нижнего направляющих шкивов 62a и 62b, а промежуточный участок поднимающего/опускающего приводного ремня синхронизации 64b намотан вокруг приводного шкива 60b посредством пары верхнего и нижнего направляющих шкивов 63a и 63b. Участки поднимающего/опускающего приводного ремня синхронизации 64a между верхним концом и направляющим шкивом 62a и между нижним концом и направляющим шкивом 62b, а также участки поднимающего/опускающего приводного ремня синхронизации 64b между верхним концом и направляющим шкивом 63a и между нижним концом и направляющим шкивом 63b натянуты без слабины параллельно захватным поднимающимся/опускающимся телам 45a - 46b (вертикальным стержнеобразным основным телам 66).
[0029] При использовании приводных средств поднятия/опускания 57A и 57B, имеющих вышеописанную конфигурацию, когда оснащенные тормозом двигатели 61 обоих приводных средств поднятия/опускания 57A и 57B не работают (когда приводные шкивы 60a и 60b застопорены), все захватные поднимающиеся/опускающиеся тела 45a - 46b и вертикальные стержнеобразные основные тела 66 несущих поднимающихся/опускающихся тел 65A и 65B приведены в заблокированное состояние, чтобы не иметь возможности подниматься и опускаться, и застопорены на своих высотах на этом этапе. Когда оснащенные тормозом двигатели 61 обоих приводных средств поднятия/опускания 57A и 57B приводятся в синхронную работу, чтобы синхронно привести в движение соответствующие поднимающие/опускающие приводные ремни синхронизации 64a и 64b в направлениях поднятия нижних концов посредством приводных шкивов 60a и 60b, все захватные поднимающиеся/опускающиеся тела 45a - 46b и вертикальные стержнеобразные основные тела 66 несущих поднимающихся/опускающихся тел 65A и 65B совершают движение вверх как единое целое с фиксированной скоростью, преодолевая силу тяжести, и, наоборот, когда выполняется приведение в движение в направлениях снижения верхних концов, все захватные поднимающиеся/опускающиеся тела 45a - 46b и вертикальные стержнеобразные основные тела 66 несущих поднимающихся/опускающихся тел 65A и 65B совершают движение вниз как единое целое с фиксированной скоростью под воздействием силы тяжести.
[0030] Все опорные блоки 67a и 67b, входящие в состав несущих поднимающихся/опускающихся тел 65A и 65B, имеют одинаковую конструкцию и, как показано на Фиг. 18, на Фиг. 21 и на Фиг. 22, каждый поддерживается на соответствующем вертикальном стержнеобразном основном теле 66, чтобы быть способным подниматься и опускаться посредством направляющего рельса 71 скольжения, прикрепленного к внутренней стороне вертикального стержнеобразного основного тела 66, чтобы продолжаться непрерывно по всей длине, и двух верхнего и нижнего скользящих блоков 71a, приспособленных к направляющему рельсу 71 скольжения, чтобы быть способными подниматься и опускаться, при этом верхний опорный блок 67a вставлен и удерживается парой приемных звеньев 72, прикрепленных на промежуточной высоте к соответствующим сторонам в Y-направлении вертикального стержнеобразного основного тела 66, а нижний опорный блок 67b вставлен и удерживается плитой 68 ременной связки на нижнем конце вертикального стержнеобразного основного тела 66.
[0031] Каждый из опорных блоков 67a и 67b включает в себя удлиненный в продольном направлении полый корпус 75. Корпус 75 включает в себя базовую плиту 73, расположенную на внутренней стороне вертикального стержнеобразного основного тела 66 и имеющую такую ширину, чтобы выступать по обе стороны в Y-направлении от вертикального стержнеобразного основного тела 66, а также задние плиты 74a и 74b, расположенные на соответствующих сторонах в Y-направлении вертикального стержнеобразного основного тела 66 с задней стороны базовой плиты 73, при этом скользящие блоки 71a установлены на задней стороне базовой плиты 73 между задними плитами 74a и 74b. Кроме того, корпус 75 включает в себя множество пальцеобразных опорных приспособлений 76a и 76b, поддерживаемых базовой плитой 73 и задними плитами 74a и 74b, способных выдвигаться и отводиться назад в X-направлении относительно базовой плиты 73. Каждое из пальцеобразных опорных приспособлений 76a и 76b принудительно выдвигается в направлении внутренней стороны из базовой плиты 73 работающей на растяжение винтовой пружиной 78, свободно сидящей на каждом из пальцеобразных опорных приспособлений 76a и 76b внутри корпуса 75 между задней плитой 74a или 74b и фланцевым участком 77, которым обладает каждое из пальцеобразных опорных приспособлений 76a и 76b, при этом фланцевый участок 77 тем самым удерживается в предельно выдвинутом положении в соприкосновении с базовой плитой 73. При использовании соответствующих пальцеобразных опорных приспособлений 76a и 76b пары пальцеобразных опорных приспособлений 76a, расположенные с узким интервалом симметрично в Y-направлении относительно вертикальной центральной линии (центральной линии между двумя захватными поднимающимися/опускающимися телами 45a и 45b или 46a и 46b, расположенными параллельно в Y-направлении) вертикального стержнеобразного основного тела 66, если смотреть в X-направлении, и пары пальцеобразных опорных приспособлений 76b, расположенные с широким интервалом симметрично в Y-направлении относительно центральной линии, выстроены в ряд поочередно с интервалами в вертикальном направлении, так что соответствующие пальцеобразные опорные приспособления 76a и 76b частично взаимно накладываются друг на друга в вертикальном направлении, если смотреть в Y-направлении.
[0032] Вертикальное стержнеобразное основное тело 66 каждого из несущих поднимающихся/опускающихся тел 65A и 65B имеет направляющий рельс 79 скольжения, прикрепленный, чтобы продолжаться непрерывно по всей длине, к наружной стороне, противоположной внутренней стороне, на которой поддерживаются опорные блоки 67a и 67b, при этом скользящие блоки 80a или 80b, приспособленные к направляющему рельсу 79 скольжения и поддерживающие каждое вертикальное стержнеобразное основное тело 66, чтобы обеспечить способность подниматься и опускаться, установлены на внутреннем боковом краю вертикального опорного звена 80c или 80d, верхний конец которого соединен с нижней поверхностью главного подвижного основания 21a или 21b. Вертикальное стержнеобразное основное тело 66 каждого из несущих поднимающихся/опускающихся тел 65A и 65B, таким образом, поддерживается главным подвижным основанием 21a или 21b, чтобы быть способным подниматься и опускаться непосредственно в центральном положении между двумя захватными поднимающимися/опускающимися телами 45a и 45b или 46a и 46b, расположенными параллельно в Y-направлении, при этом, что касается поднятия и опускания, то два захватных поднимающихся/опускающихся тела 45a и 45b, расположенные параллельно в Y-направлении, и вертикальное стержнеобразное основное тело 66 несущего поднимающегося/опускающегося тела 65A в своем промежуточном положении совершают движения поднятия и опускания как единое целое, а также два захватных поднимающихся/опускающихся тела 46a и 46b, расположенные параллельно в Y-направлении, и вертикальное стержнеобразное основное тело 66 несущего поднимающегося/опускающегося тела 65B в своем промежуточном положении совершают движения поднятия и опускания как единое целое.
[0033] Как показано на Фиг. 16 и на Фиг. 20, среди захватных поднимающихся/опускающихся тел 45a - 46b два захватных поднимающихся/опускающихся тела 45a и 46b, расположенные параллельно в X-направлении, имеют вставленный между ними параллелограммный многозвенный механизм 81A, чтобы сделать возможным именно параллельное перемещение этих двух тел в X-направлении, а также два захватных поднимающихся/опускающихся тела 45b и 46a, расположенные параллельно в X-направлении, имеют вставленный между ними параллелограммный многозвенный механизм 81B, чтобы сделать возможным именно параллельное перемещение этих двух тел в X-направлении. Параллелограммные многозвенные механизмы 81A и 81B имеют одинаковую конструкцию, при этом каждый составлен из центрального поднимающегося/опускающегося соединительного звена 82, пары верхних и нижних качающихся звеньев 83a и 83b, помещенных между центральным поднимающимся/опускающимся соединительным звеном 82 и захватным поднимающимся/опускающимся телом 45a или 46a на одной стороне, а также пары верхних и нижних качающихся звеньев 84a и 84b, помещенных между центральным поднимающимся/опускающимся соединительным звеном 82 и захватным поднимающимся/опускающимся телом 45b или 46b на другой стороне. Каждое верхнее качающееся параллельное звено 83a поддерживается с возможностью поворота на верхнем конце центрального поднимающегося/опускающегося соединительного звена 82 и в более высокой точке на наружной стороне расположенного в X-направлении участка плиты захватного поднимающегося/опускающегося тела 45a или 46a, каждое верхнее качающееся параллельное звено 84a поддерживается с возможностью поворота на верхнем конце центрального поднимающегося/опускающегося соединительного звена 82 и в более высокой точке на наружной стороне расположенного в X-направлении участка плиты захватного поднимающегося/опускающегося тела 46b или 45b, каждое нижнее качающееся параллельное звено 83b поддерживается с возможностью поворота на нижнем конце центрального поднимающегося/опускающегося соединительного звена 82 и наружной стороне расположенного в X-направлении участка плиты захватного поднимающегося/опускающегося тела 45a или 46a, чтобы быть параллельным качающемуся параллельному звену 83a, расположенному непосредственно над ним, а каждое нижнее качающееся параллельное звено 84b поддерживается с возможностью поворота на нижнем конце центрального поднимающегося/опускающегося соединительного звена 82 и наружной стороне расположенного в X-направлении участка плиты захватного поднимающегося/опускающегося тела 46b или 45b, чтобы быть параллельным качающемуся параллельному звену 84a, расположенному непосредственно над ним, для создания конфигурации, при которой в случае, когда интервал между двумя захватными поднимающимися/опускающимися телами 45a и 46b, расположенными параллельно в X-направлении, и интервал между двумя захватными поднимающимися/опускающимися телами 45a и 46b, расположенными параллельно в X-направлении, достигают максимального значения, качающиеся параллельные звенья 83a - 84b наклонены косо вверх относительно каждого центрального поднимающегося/опускающегося соединительного звена 82, как показано на Фиг. 16.
[0034] Как показано на Фиг. 18 и на Фиг. 20, среди захватных поднимающихся/опускающихся тел 45a - 46b два захватных поднимающихся/опускающихся тела 45a и 45b, расположенные параллельно в Y-направлении, имеют вставленный между ними параллелограммный многозвенный механизм 85A, чтобы сделать возможным именно параллельное перемещение этих двух тел в Y-направлении, а также два захватных поднимающихся/опускающихся тела 46a и 46b, расположенные параллельно в Y-направлении, имеют вставленный между ними параллелограммный многозвенный механизм 85B, чтобы сделать возможным именно параллельное перемещение этих двух тел в Y-направлении. Оба параллелограммных многозвенных механизма 85A и 85B имеют одинаковую конструкцию, при этом каждый включает в себя два поднимающихся/опускающихся соединительных блока 86 и 87 верхнего и нижнего яруса. Каждый верхний поднимающийся/опускающийся соединительный блок 86 расположен выше, чем верхний опорный блок 67a на соответствующем несущем поднимающемся/опускающемся теле 65A или 65B, а нижний поднимающийся/опускающийся соединительный блок 87 расположен в промежуточном положении между соответствующими верхним и нижним опорными блоками 67a и 67b на соответствующих несущих поднимающихся/опускающихся телах 65A или 65B.
[0035] Два поднимающихся/опускающихся соединительных блока 86 и 87 верхнего и нижнего яруса имеют одинаковую конструкцию, при этом каждый составлен из центрального поднимающегося/опускающегося соединительного звена 88, которое поддерживается так, чтобы быть способным подниматься и опускаться, посредством двух верхнего и нижнего скользящих блоков 88a с помощью направляющего рельса 71 скольжения на внутренней стороне вертикального стержнеобразного основного тела 66 соответствующего несущего поднимающегося/опускающегося тела 65A или 65B, пары верхних и нижних качающихся звеньев 89a и 89b, помещенных между центральным поднимающимся/опускающимся соединительным звеном 88 и захватным поднимающимся/опускающимся телом 45a или 46a на одной стороне, а также пары верхних и нижних качающихся звеньев 90a и 90b, помещенных между центральным поднимающимся/опускающимся соединительным звеном 88 и захватным поднимающимся/опускающимся телом 45b или 46b на другой стороне. Каждое верхнее качающееся параллельное звено 89a поддерживается с возможностью поворота на верхнем конце центрального поднимающегося/опускающегося соединительного звена 88 и в более высокой точке на наружной стороне расположенного в Y-направлении участка плиты захватного поднимающегося/опускающегося тела 45a или 46a, каждое верхнее качающееся параллельное звено 90a поддерживается с возможностью поворота на верхнем конце центрального поднимающегося/опускающегося соединительного звена 88 и в более высокой точке на наружной стороне расположенного в Y-направлении участка плиты захватного поднимающегося/опускающегося тела 46b или 45b, каждое нижнее качающееся параллельное звено 89b поддерживается с возможностью поворота на нижнем конце центрального поднимающегося/опускающегося соединительного звена 88 и наружной стороне расположенного в Y-направлении участка плиты захватного поднимающегося/опускающегося тела 45a или 46a, чтобы быть параллельным качающемуся параллельному звену 89a, расположенному непосредственно над ним, а каждое нижнее качающееся параллельное звено 90b поддерживается с возможностью поворота на нижнем конце центрального поднимающегося/опускающегося соединительного звена 88 и наружной стороне расположенного в Y-направлении участка плиты захватного поднимающегося/опускающегося тела 46b или 45b, чтобы быть параллельным качающемуся параллельному звену 90a, расположенному непосредственно над ним, для создания конфигурации, при которой, как показано на Фиг. 18, в случае, когда интервал между захватными поднимающимися/опускающимися телами 45a и 45b и интервал между захватными поднимающимися/опускающимися телами 46a и 46b достигают максимального значения, качающиеся параллельные звенья 89a - 90b наклонены косо вверх относительно каждого центрального поднимающегося/опускающегося соединительного звена 88. Разумеется, в случае, когда интервал между захватными поднимающимися/опускающимися телами 45a и 45b и интервал между захватными поднимающимися/опускающимися телами 46a и 46b достигают максимального значения, каждое центральное поднимающееся/опускающееся соединительное звено 88 расположено в положении, максимально отделенном вверх от расположенного под ним опорного блока 67a или 67b соответствующего несущего поднимающегося/опускающегося тела 65A или 65B.
[0036] Для последующего описания способа применения и предпринимаемых действий контейнеры C помещают в ориентационном положении, при котором их соответствующие боковые края параллельны X-направлению и Y-направлению на виде в плане на складском участке прямоугольной планарной формы, окруженном прямоугольной рамочной конструкцией 4. В ходе этого процесса между взаимно прилегающими контейнерами C сохраняют свободные пространства для подъема и опускания захватных поднимающихся/опускающихся тел 45a - 46b и несущих поднимающихся/опускающихся тел 65A и 65B, входящих в состав транспортировочного устройства 1. Кроме того, хотя имеется возможность поместить единственный контейнер C независимо внутри складского участка, в большинстве случаев штабелируется множество контейнеров C одинакового размера на виде в плане. Разумеется, что касается размера на виде в плане, обслуживаются контейнеры C различных размеров в заданном диапазоне от минимального размера до максимального размера. Как показано на Фиг. 20 и на Фиг. 23, в средстве записи данных, входящем в состав блока управления, для автоматической работы транспортировочного устройства 1 вместе с информацией о размере контейнера, информацией о штабелировании и другой необходимой информацией информация о положении каждого контейнера C, расположенного внутри складского участка, регистрируется в абсолютных значениях координат X-Y на складском участке в отношении центральной точки P на виде в плане контейнера C.
[0037] С другой стороны, как показано на Фиг. 23 - Фиг. 25, каждый из контейнеров C, обслуживаемых в настоящем складском хозяйстве, включает в себя усиленные фланцевые участки F1 - F3, выступающие непрерывно по всей периферии в трех местах, а именно на самом верхнем конце, непосредственно под самым верхним концом и на самом нижнем конце, а также включает в себя стеночный участок B ножки на нижней поверхности. Таким образом, когда контейнеры C одинакового планарного размера уложены в штабель, стеночный участок B ножки верхнего контейнера C встраивается в проемный участок нижнего контейнера C, чтобы не допустить смещения положения верхнего и нижнего контейнеров C, и в то же время самый нижний концевой фланцевый участок F3 верхнего контейнера C накладывается на самый верхний концевой фланцевый участок F1 нижнего контейнера C. В настоящем изобретении два верхних и нижних фланцевых участка F1 и F2 на верхней стороне каждого контейнера C используются в качестве выступающих участков, с которыми пальцеобразные опорные приспособления 76a и 76b соответствующих опорных блоков 67a и 67b несущих поднимающихся/опускающихся тел 65A и 65B входят в зацепление при подъеме контейнера C.
[0038] Как показано на Фиг. 14 и на Фиг. 20A, захватные поднимающиеся/опускающиеся тела 45a - 46b и несущие поднимающиеся/опускающиеся тела 65A и 65B, входящие в состав транспортировочного устройства 1, на виде в плане находятся в исходных положениях ожидания, располагаясь за пределами крайних точек готового к обслуживанию контейнера C на виде в плане и находясь в пределах четырехстороннего расположенного в вертикальном направлении сквозного проемного участка, окруженного расположенной в X-направлении парой главных подвижных оснований 21a и 21b и расположенной в Y-направлении парой взаимосвязывающих стержнеобразных тел 32a и 32b, а на виде сбоку - в режиме ожидания на предельных высотах поднятия, превышающих максимальную высоту штабелирования контейнеров внутри складского участка. Из этого состояния путем перемещения расположенных в X-направлении пары главных подвижных оснований 21a и 21b ближе друг к другу синхронно в X-направлении благодаря приведению в работу двигателя 26 работающего в X-направлении приводного средства 22, как описано выше, а также перемещения расположенных в Y-направлении пары вспомогательных подвижных оснований 30a и 30b и расположенных в Y-направлении пары вспомогательных подвижных оснований 31a и 31b на соответствующих главных подвижных основаниях 21a и 21b ближе друг к другу синхронно в Y-направлении благодаря приведению в работу двигателя 40 работающего в Y-направлении приводного средства 36 прямоугольный параллелограмм, окруженный четырьмя захватными поднимающимися/опускающимися телами 45a - 46b, сжимается, как показано на Фиг. 10, и, наоборот, путем перемещения расположенных в X-направлении пары главных подвижных оснований 21a и 21b друг от друга синхронно в X-направлении и перемещения расположенных в Y-направлении пары вспомогательных подвижных оснований 30a и 30b и расположенных в Y-направлении пары вспомогательных подвижных оснований 31a и 31b друг от друга синхронно в Y-направлении захватные поднимающиеся/опускающиеся тела 45a - 46b и несущие поднимающиеся/опускающиеся тела 65A и 65B возвращаются в исходные положения ожидания, показанные на Фиг. 20A. Несущие поднимающиеся/опускающиеся тела 65A и 65B всегда расположены в соответствующих центральных положениях между парой захватных поднимающихся/опускающихся тел 45a и 45b в Y-направлении и между парой поднимающихся/опускающихся тел 46a и 46b в Y-направлении.
[0039] Другими словами, работающее в X-направлении приводное средство 22 перемещает четыре захватных поднимающихся/опускающихся тела 45a - 46b, взаимно симметрично и синхронно, ближе и дальше от расположенной в Y-направлении центральной линии YL, входящей в число двух линий, а именно расположенной в X-направлении центральной линии XL и расположенной в Y-направлении центральной линии YL, проходящих через центральную точку прямоугольного параллелограмма, окруженного четырьмя захватными поднимающимися/опускающимися телами 45a - 46b, параллельно соответствующим боковым сторонам прямоугольного параллелограмма, работающее в Y-направлении приводное средство 36 перемещает четыре захватных поднимающихся/опускающихся тела 45a - 46b, взаимно симметрично и синхронно, ближе и дальше от расположенной в X-направлении центральной линии XL, и, таким образом, создана конфигурация, при которой четыре захватных поднимающихся/опускающихся тела 45a - 46b могут приводиться в движение горизонтально и синхронно с помощью работающих в X-направлении и Y-направлении приводных средств 22 и 36, чтобы расширить или сжать прямоугольный параллелограмм, окруженный четырьмя захватными поднимающимися/опускающимися телами 45a - 46b, не изменяя центральной точки и ориентации прямоугольного параллелограмма.
[0040] Для извлечения контейнера C, расположенного и хранимого в конкретном месте внутри складского участка, выполняются автоматические действия транспортировочного устройства 1 согласно информации о положении контейнера C, который требуется извлечь, для перемещения вбок главного перемещающегося тела 2 в Y-направлении и перемещения вбок вспомогательного перемещающегося тела 3 на главном перемещающемся теле 2 в X-направлении, так что центр прямоугольного параллелограмма, окруженного захватными поднимающимися/опускающимися телами 45a - 46b, находящимися в режиме ожидания в исходных положениях ожидания на вспомогательном перемещающемся теле 3, перемещается в положение (начальное положение выполнения операции извлечения), в котором оно согласуется с центральной точкой P подлежащего извлечению контейнера C на виде в плане. Когда захватные поднимающиеся/опускающиеся тела 45a - 46b, находящиеся в режиме ожидания в исходных положениях ожидания, размещены в начальном положении выполнения операции извлечения, которое является заданным положением непосредственно над подлежащим извлечению контейнером C, оба работающих в X-направлении и Y-направлении приводных средства 22 и 36 приводятся в работу для перемещения соответствующих захватных поднимающихся/опускающихся тел 45a - 46b ближе друг к другу синхронно в положения (начальные положения опускания), отвечающие соответствующим углам прямоугольного параллелограмма, который лишь на заданную величину превышает планарный размер подлежащего извлечению контейнера C. Данный процесс перемещения захватных поднимающихся/опускающихся тел 45a - 46b, находящихся в режиме ожидания в исходных положениях ожидания, ближе друг к другу синхронно в начальные положения опускания может выполняться одновременно с процессом перемещения захватных поднимающихся/опускающихся тел 45a - 46b, находящихся в режиме ожидания в исходных положениях ожидания на вспомогательном перемещающемся теле 3, в X- и Y-направлениях в начальное положение выполнения операции извлечения.
[0041] Когда, пребывая в начальном положении выполнения операции извлечения, захватные поднимающиеся/опускающиеся тела 45a - 46b переместились в начальные положения опускания, приводные средства поднятия/опускания 57A и 57B приводятся в работу для перемещения захватных поднимающихся/опускающихся тел 45a - 46b и вертикальных стержнеобразных основных тел 66 несущих поднимающихся/опускающихся тел 65A и 65B вниз как единого целого и синхронно до предельного уровня опускания, на котором плиты 68 ременной связки вертикальных стержнеобразных основных тел 66 располагаются в непосредственной близости от поверхности пола складского участка. Затем оба работающих в X-направлении и Y-направлении приводных средства 22 и 36 приводятся в работу для перемещения соответствующих захватных поднимающихся/опускающихся тел 45a - 46b, находящихся в положениях, отстоящих на одинаковое расстояние от четырех углов подлежащего извлечению контейнера C (четырех углов соответствующих фланцевых участков F1 - F3), синхронно ближе к центральной точке P контейнера C, который требуется извлечь, чтобы тем самым приспособить соединительные участки 47 соответствующих захватных поднимающихся/опускающихся тел 45a - 46b к соответствующим углам подлежащего извлечению контейнера C, а также приведения препятствующих скольжению полосообразных тел 48 на соответствующих прямоугольных боковых краях соответствующих соединительных участков 47 в контакт с прижатием к соответствующим углам подлежащего извлечению контейнера C, как показано на Фиг. 23.
[0042] Хотя точки воздействия для перемещения захватных поднимающихся/опускающихся тел 45a - 46b внутрь в X-направлении и Y-направлении в этом процессе представляют собой места расположения скользящих блоков 50 на сторонах опорных звеньев 43a и 44b относительно поднимающих/опускающих направляющих рельсов 49, прикрепленных к захватным поднимающимся/опускающимся телам 45a - 46b, причем, когда контейнер C на поверхности пола складского участка захватывается, захватные поднимающиеся/опускающиеся тела 45a - 46b пребывают в свободно свисающем состоянии, продолжаясь далеко вниз от мест расположения скользящих блоков 50, которые располагаются на сторонах опорных звеньев 43a и 44b и представляют собой точки воздействия, четыре захватных поднимающихся/опускающихся тела 45a - 46b соединены друг с другом в X-направлении и Y-направлении параллелограммными многозвенными механизмами 81A и 81B и параллелограммными многозвенными механизмами 85A и 85B соответственно, так что параллелограммные многозвенные механизмы 81A, 81B, 85A, 85B удерживают захватные поднимающиеся/опускающиеся тела 45a, 45b, 46a, 46b, расположенные параллельно в X-направлении и Y-направлении во взаимно параллельных ориентационных положениях, при этом одновременно сила тяжести, действующая на центральные поднимающиеся/опускающиеся соединительные звенья 82 и центральные поднимающиеся/опускающиеся соединительные звенья 88 в центре многозвенных механизмов, заставляет захватные поднимающиеся/опускающиеся тела 45a - 46b перемещаться ближе друг к другу в X-направлении и Y-направлении посредством соответствующих качающихся параллельных звеньев 83a - 84b и 89a - 90b, а потому соответствующие углы штабелированных контейнеров C могут надежно захватываться четырьмя захватными поднимающимися/опускающимися телами 45a - 46b.
[0043] В ходе этого процесса вертикальные стержнеобразные основные тела 66 несущих поднимающихся/опускающихся тел 65A и 65B перемещаются прямолинейно в X-направлении ближе к расположенному в направлении ширины центральному положению двух боковых поверхностей, параллельных Y-направлению, контейнера C, который требуется извлечь, при этом, благодаря тому, что два опорных блока 67a и 67b верхнего и нижнего яруса, поддерживаемые вертикальными стержнеобразными основными телами 66, имеют конструкции, при которых на виде в плане, как показано на Фиг. 23, пальцеобразные опорные приспособления 76a и 76b выступают глубже внутрь, чем расположенные в X-направлении контактные поверхности (поверхности препятствующих скольжению полосообразных тел 48) захватных поднимающихся/опускающихся тел 45a и 45b и захватных поднимающихся/опускающихся тел 46a и 46b на соответствующих сторонах в Y-направлении, в процессе, когда соединительные участки 47 захватных поднимающихся/опускающихся тел 45a - 46b подгоняются к соответствующим углам подлежащего извлечению контейнера C, как описано выше, каждое пальцеобразное опорное приспособление, которое из числа пальцеобразных опорных приспособлений 76a и 76b, входящих в состав опорных блоков 67a и 67b верхнего и нижнего яруса, находится в положении, в котором хотя бы участок его дистальной концевой поверхности соприкасается с внешней боковой поверхностью подлежащего извлечению контейнера C, другими словами, периферийной боковой поверхностью любого из соответствующих фланцевых участков F1 - F3, принимается и удерживается периферийной боковой поверхностью соответствующего фланцевого участка из числа соответствующих фланцевых участков F1 - F3 и, таким образом, соответственно отводится назад в корпус 75, преодолевая толкающую силу работающей на растяжение винтовой пружины 78, в то время как пальцеобразные опорные приспособления, кроме тех, что описаны выше, вводятся выше и ниже соответствующих фланцевых участков F1 - F3 в выдвинутом состоянии в соответствии с перемещением опорных блоков 67a и 67b.
[0044] В примере, показанном на Фиг. 24 и на Фиг. 25, среди штабелированных контейнеров C, которые требуется извлечь, контейнер C1 на самом нижнем ярусе и контейнер C2, расположенный непосредственно над ним, располагаются смежно с нижними опорными блоками 67b, а два контейнера Cu и Cd верхнего и нижнего яруса, находящиеся на промежуточных высотах, располагаются смежно с верхними опорными блоками 67a, при этом из числа пальцеобразных опорных приспособлений 76a и 76b в двух опорных блоках 67a и 67b верхнего и нижнего яруса несколько пальцеобразных опорных приспособлений 76a и 76b, обращенных к наложенным друг на друга в вертикальном направлении фланцевым участкам F3 и F1, расположенным между двумя контейнерами C1 и C2 верхнего и нижнего яруса и между двумя контейнерами Cu и Cd верхнего и нижнего яруса, смежными с соответствующими опорными блоками 67a и 67b, а также к фланцевым участкам F2 второго яруса нижних контейнеров C1 и Cd, соответственно отводятся назад в корпуса 75, преодолевая толкающие силы работающих на растяжение винтовых пружин 78, а другие пальцеобразные опорные приспособления 76a и 76b вставляются между соответствующими верхними и нижними фланцевыми участками F1 и F2 и между соответствующими верхними и нижними фланцевыми участками F2 и F3 соответствующих контейнеров C1, C2, Cu и C2, оставаясь при этом в выдвинутом состоянии (состоянии, показанном на левой половине Фиг. 24).
[0045] Затем, когда приводные средства поднятия/опускания 57A и 57B приводятся в работу и захватные поднимающиеся/опускающиеся тела 45a - 46b, а также вертикальные стержнеобразные основные тела 66 несущих поднимающихся/опускающихся тел 65A и 65B, находящиеся на предельном уровне опускания, перемещаются вверх синхронно до предельного уровня поднятия, пальцеобразные опорные приспособления, которые, из числа пальцеобразных опорных приспособлений 76a и 76b опорных блоков 67a и 67b, располагаются в выдвинутом состоянии непосредственно под двумя верхними и нижними фланцевыми участками F1 и F2 на верхних сторонах соответствующих контейнеров C, другими словами, в примере на Фиг. 25, внутренние пары правого и левого пальцеобразных опорных приспособлений 76a, окрашенные в черный цвет, поднимают контейнер C1 самого нижнего яруса и контейнер Cd, находящийся на промежуточной высоте, посредством фланцевых участков F1 и F2 каждого из них путем поднятия опорных блоков 67a и 67b в состоянии удерживания нижними плитами 68 ременной связки и находящимися на промежуточной высоте приемными звеньями 72 вертикальных стержнеобразных основных тел 66. Разумеется, в зависимости от интервала между двумя верхними и нижними фланцевыми участками F1 и F2, интервала между фланцевыми участками F2 и F3 или толщин фланцевых участков F1 и F2 контейнер C1 самого нижнего яруса и контейнер Cd, находящийся на промежуточной высоте, могут быть подняты посредством одного из двух фланцевых участков F1 и F2 с помощью внутренних пар правого и левого пальцеобразных опорных приспособлений 76a или наружных пар правого и левого пальцеобразных опорных приспособлений 76b из числа пальцеобразных опорных приспособлений 76a и 76b.
[0046] Как ясно из вышеприведенного описания, когда, как упомянуто выше, имеется контейнер Cd, который поднимается вверх верхними опорными блоками 67a, штабелированные контейнеры делятся на верхнюю группу штабелированных контейнеров, в которой контейнер Cd находится на самом нижнем конце, и нижнюю группу штабелированных контейнеров, в которой контейнер, расположенный непосредственно под контейнером Cd, находится на самом верхнем конце, при этом верхняя группа штабелированных контейнеров поднимается вверх посредством контейнера C на самом нижнем конце с помощью верхних опорных блоков 67a, а нижняя группа штабелированных контейнеров поднимается вверх посредством контейнера C1 на самом нижнем конце с помощью нижних опорных блоков 67b. Очевидно, когда число ярусов штабелированных контейнеров C мало и контейнер Cd, который поднимается вверх верхними опорными блоками 67a, как упомянуто выше, отсутствует, штабелированные контейнеры C будут подниматься вверх посредством контейнера C1 самого нижнего яруса с помощью нижних опорных блоков 67b.
[0047] Контейнеры C, которые требуется извлечь, поднимаются вертикально вверх с поверхности пола складского участка расположенной в X-направлении парой несущих поднимающихся/опускающихся тел 65A и 65B, как описано выше, причем в ходе этого процесса соответствующие соединительные участки 47 четырех захватных поднимающихся/опускающихся тел 45a - 46b, которые поднимаются вместе с несущими поднимающимися/опускающимися телами 65A и 65B, подгоняются и захватывают четыре угла контейнеров C, которые требуется извлечь, а потому вся совокупность подлежащих извлечению контейнеров C удерживается в вертикально штабелированном положении, при этом раскачивание всей совокупности уложенных в штабель контейнеров C в боковом направлении не допускается.
[0048] Когда подлежащие извлечению контейнеры C, установленные в заданном положении четырьмя захватными поднимающимися/опускающимися телами 45a - 46b и поддерживаемые расположенной в X-направлении парой несущих поднимающихся/опускающихся тел 65A и 65B, подняты на предельный уровень поднятия, главное перемещающееся тело 2 перемещается вбок в Y-направлении, при этом вспомогательное перемещающееся тело 3 перемещается вбок в X-направлении на главном перемещающемся теле 2 в результате автоматических действий транспортировочного устройства 1, так что подлежащие извлечению контейнеры C горизонтально переносятся на уровне, превышающем максимальную высоту контейнеров C, хранящихся в штабелированном состоянии внутри складского участка, в положение непосредственно над осуществляющим перенос концевым участком 7a извлекающего транспортера 7. Когда подлежащие извлечению контейнеры C, установленные в заданном положении четырьмя захватными поднимающимися/опускающимися телами 45a - 46b и поддерживаемые расположенной в X-направлении парой несущих поднимающихся/опускающихся тел 65A и 65B, подняты на предельный уровень поднятия, эти контейнеры C пребывают в состоянии проникновения через вспомогательное перемещающееся тело 3 в вертикальном направлении на четырехстороннем находящемся в вертикальном направлении сквозном проемном участке, окруженном парой главных подвижных оснований 21a и 21b, расположенных в X-направлении, и парой взаимосвязывающих стержнеобразных тел 32a и 32b, расположенных в Y-направлении.
[0049] После этого, путем приведения в действие четырех захватных поднимающихся/опускающихся тел 45a - 46b и расположенной в X-направлении пары поднимающихся/опускающихся тел 65A и 65B с помощью операций, выполняемых в обратном порядке по отношению к выполняемым при подъеме подлежащих извлечению контейнеров C с поверхности пола складского участка, подлежащие извлечению контейнеры C, установленные в заданном положении четырьмя захватными поднимающимися/опускающимися телами 45a - 46b и поддерживаемые расположенной в X-направлении парой несущих поднимающихся/опускающихся тел 65A и 65B, можно опустить на осуществляющий перенос концевой участок 7a извлекающего транспортера 7. Кроме того, для хранения подлежащего хранению контейнера, который был перенесен транспортером-накопителем 6 на осуществляющий перенос концевой участок 6a, в доступном пространстве внутри складского участка подлежащий хранению контейнер, расположенный на осуществляющем перенос концевом участке 6a транспортера-накопителя 6, поднимается четырьмя захватными поднимающимися/опускающимися телами 45a - 46b и расположенной в X-направлении парой поднимающихся/опускающихся тел 65A и 65B на предельный уровень поднятия с помощью тех же операций, как при поднятии подлежащих извлечению контейнеров C с поверхности пола складского участка, после чего переносится к заданному месту хранения в результате автоматических действий транспортировочного устройства 1, а затем подлежащий хранению контейнер опускается на заданное доступное место хранения с помощью тех же операций, как и при опускании подлежащих извлечению контейнеров C на осуществляющий перенос концевой участок 7a извлекающего транспортера 7.
[0050] В вышеописанном складском хозяйстве единственный контейнер либо все множество контейнеров в штабелированном состоянии может извлекаться путем переноса из определенного места на складском участке на осуществляющий перенос концевой участок 7a извлекающего транспортера 7 либо храниться путем транспортировки с осуществляющего перенос концевого участка 6a транспортера-накопителя 6 в доступное пространство на складском участке, при этом в качестве другого способа хранения/извлечения контейнеров может осуществляться способ индивидуального извлечения только конкретного контейнера C из числа штабелированных контейнеров, способ индивидуального хранения только конкретного контейнера C из числа штабелированных контейнеров, расположенных на осуществляющем перенос концевом участке 6a транспортера-накопителя 6, либо способ штабелирования и хранения подлежащего хранению контейнера на другом контейнере одинакового планарного размера, хранимого внутри складского участка, и т.д.
[0051] В способе индивидуального хранения/извлечения четыре захватных поднимающихся/опускающихся тела 45a - 46b и расположенная в X-направлении пара поднимающихся/опускающихся тел 65A и 65B снижаются относительно штабелированных контейнеров C, в число которых входит контейнер, подлежащий индивидуальному хранению или извлечению, примерно до уровня нижней поверхности контейнера, подлежащего индивидуальному хранению или извлечению, после чего принудительно выполняют вышеописанную операцию поднятия контейнера. Следовательно, штабелированные контейнеры C в состоянии, в котором контейнер, подлежащий индивидуальному хранению или извлечению, расположен на самом нижнем конце, могут быть подняты на предельный уровень поднятия, затем штабелированные контейнеры C переносятся горизонтально в положение непосредственно над заданным местом опускания (осуществляющим перенос концевым участком 7a извлекающего транспортера 7 или доступным пространством на складском участке, или контейнером одинакового планарного размера, хранимым на складском участке), после чего штабелированные контейнеры C опускаются на заданное место опускания. После этого четыре захватных поднимающихся/опускающихся тела 45a - 46b и расположенная в X-направлении пара поднимающихся/опускающихся тел 65A и 65B, которые высвобождены в боковом направлении по сторонам от штабелированных контейнеров C, не поднимаются на предельный уровень поднятия, а принудительно выполняют операцию подъема, за исключением контейнера, подлежащего индивидуальному хранению или извлечению, всех контейнеров из числа опущенных штабелированных контейнеров C, уложенных штабелем над контейнером, находящимся на самом нижнем конце, который представляет собой контейнер, подлежащий индивидуальному хранению или извлечению. Следовательно, лишь контейнер, подлежащий индивидуальному хранению или извлечению, остается на заданном месте опускания, после чего операция по хранению/извлечению контейнера, подлежащего индивидуальному хранению или извлечению, завершается. Контейнеры C, не подлежащие индивидуальному хранению или извлечению и поднятые вверх, оставляя контейнер, подлежащий индивидуальному хранению или извлечению, могут быть перенесены и опущены в исходном месте или новом месте с помощью тех же операций, что описаны выше.
[0052] При опускании единственного контейнера C или штабелированных контейнеров C, подлежащих хранению или извлечению, установленных четырьмя захватными поднимающимися/опускающимися телами 45a - 46b и поддерживаемых расположенной в X-направлении парой несущих поднимающихся/опускающихся тел 65A и 65B в заданном месте, как описано выше, путем управления приводными средствами поднятия/опускания 57A и 57B так, что после того как контейнер или контейнеры C, подлежащие хранению или извлечению, поступили и удерживаются на заданном месте, опорные блоки 67a и 67b незначительно снижаются и каждое из пальцеобразных опорных приспособлений 76a и 76b, поддерживающих фланцевый участок F1 или F2 контейнера C, подлежащего хранению или извлечению, чуть отводятся вниз от фланцевого участка F1 или F2, при перемещении четырех захватных поднимающихся/опускающихся тел 45a - 46b и несущих поднимающихся/опускающихся тел 65A и 65B для отделения в наружном направлении от контейнера или контейнеров C, подлежащих хранению или извлечению, чрезмерного контакта при скольжении между каждым из фланцевых участков F1 и F2 контейнера или контейнеров C, подлежащих хранению или извлечению, и пальцеобразным опорным приспособлением 76a или 76b, поддерживающим его, можно избежать.
[0053] Однако при вышеописанной конфигурации опорные блоки 67a и 67b поддерживаются лишь под силой тяжести в фиксированных положениях относительно вертикальных стержнеобразных основных тел 66 несущих поднимающихся/опускающихся тел 65A и 65B и могут свободно перемещаться вверх, преодолевая силу тяжести, из этих фиксированных положений, а значит, даже если вертикальные стержнеобразные основные тела 66 несущих поднимающихся/опускающихся тел 65A и 65B находятся в застопоренном состоянии в положениях ниже идеальных положений, упомянутых выше, опорные блоки 67a и 67b поддерживаются контейнером или контейнерами C, подлежащими хранению или извлечению, посредством каждого из пальцеобразных опорных приспособлений 76a и 76b, расположенных на верхней стороне фланцевого участка F1 или F2 контейнера C, подлежащего хранению или извлечению, при этом вертикальные стержнеобразные основные тела 66 несущих поднимающихся/опускающихся тел 65A и 65B просто опускаются относительно опорных блоков 67a и 67b, так что ни одно из пальцеобразных опорных приспособлений 76a и 76b, расположенных на верхней стороне фланцевого участка F1 или F2 контейнера C, подлежащего хранению или извлечению, не будет оказывать давления сверху вниз на фланцевый участок F1 или F2.
[0054] В рамках настоящего изобретения существование по существу четырех захватных поднимающихся/опускающихся тел 45a - 46b не является обязательным условием. Например, расширив интервал в каждой паре пальцеобразных опорных приспособлений 76a или 76b, расположенных в симметричных положениях по обеим сторонам вертикальной центральной линии каждой из двух параллельных боковых поверхностей контейнера C, контейнер C может быть поднят и перенесен с сохранением высокой устойчивости даже без четырех захватных поднимающихся/опускающихся тел 45a - 46b. Разумеется, имеется возможность для создания конфигурации, при которой установлены четыре несущих поднимающихся/опускающихся тела, взаимосвязанные соответственно с четырьмя боковыми поверхностями контейнера C, чтобы позволить поднять и перенести контейнер C с сохранением еще более высокой устойчивости, не имея четырех захватных поднимающихся/опускающихся тел 45a - 46b.
Промышленная применимость
[0055] Транспортировочное устройство для подъема/опускания контейнеров согласно настоящему изобретению может эффективно применяться для операций по хранению/извлечению штабелированных контейнеров в складском хозяйстве, предназначенном для штабелированных контейнеров различных размеров.
Ссылочные позиции
[0056] C, C1, C2, Cu, Cd: контейнер
F1 - F3: фланцевый участок контейнера
B: стеночный участок ножки контейнера
1: транспортировочное устройство типа мостового крана
2: главное перемещающееся тело
3: вспомогательное перемещающееся тело
4: прямоугольная рамочная конструкция
6: транспортер-накопитель
7: извлекающий транспортер
6a, 7a: осуществляющий перенос концевой участок
8a, 8b: кареточный участок
11a, 11b, 14, 23a, 23b, 37a, 37b: ремень синхронизации
13, 15, 26, 40: двигатель
20a, 20b, 29a, 29b, 33a, 33b: направляющий рельс
21a, 21b: главное подвижное основание
22: работающее в X-направлении приводное средство
30a - 31b: вспомогательное подвижное основание
36: работающее в Y-направлении приводное средство
45a - 46b: захватное поднимающееся/опускающееся тело
47: соединительный участок
49: поднимающий/опускающий направляющий рельс
51A, 51B: соединительное средство
53, 54, 71, 79: направляющий рельс скольжения
55: L-образная опорная плита
56: опорная плита
57A, 57B: приводное средство поднятия/опускания
59: общий приводной вал
60a, 60b: приводной шкив
61: оснащенный тормозом двигатель
62a - 63b: направляющий шкив
64a, 64b: поднимающий/опускающий приводной ремень синхронизации
65A, 65B: несущее поднимающееся/опускающееся тело
66: вертикальное стержнеобразное основное тело
67a, 67b: опорный блок
75: корпус
76a, 76b: пальцеобразное опорное приспособление
78: работающая на растяжение винтовая пружина
81A, 81B, 85A, 85B: параллелограммный многозвенный механизм
82, 88: центральное поднимающееся/опускающееся соединительное звено
83a - 84b, 89a - 90b: качающееся параллельное звено
86, 87: поднимающийся/опускающийся соединительный блок
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА/ОПУСКАНИЯ КОНТЕЙНЕРОВ | 2015 |
|
RU2683713C2 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА/ОПУСКАНИЯ КОНТЕЙНЕРОВ | 2015 |
|
RU2683893C2 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА/ОПУСКАНИЯ КОНТЕЙНЕРОВ | 2015 |
|
RU2689637C2 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА/ОПУСКАНИЯ КОНТЕЙНЕРОВ | 2015 |
|
RU2689679C2 |
| УЗЕЛ НАКЛАДЫВАНИЯ ОТКРЫВАЮЩИХ УСТРОЙСТВ НА УПАКОВКИ ПИЩЕВЫХ ПРОДУКТОВ, НАЛИВАЕМЫХ В ТРУБУ УПАКОВОЧНОГО МАТЕРИАЛА | 2009 |
|
RU2536446C2 |
| СТИРАЛЬНАЯ МАШИНА | 2019 |
|
RU2756501C1 |
| СТИРАЛЬНАЯ МАШИНА | 2021 |
|
RU2838292C2 |
| КОНСТРУКЦИЯ ПОРТА ЗАРЯДКИ | 2013 |
|
RU2585937C1 |
| КЛЮЧ ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ МНОЖЕСТВА МЕХАНИЗМОВ ЧЕЛОВЕКОПОДОБНОГО РОБОТА | 2015 |
|
RU2669131C2 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО С ИСПОЛЬЗОВАНИЕМ ТЕЛЕЖКИ | 2008 |
|
RU2412101C2 |
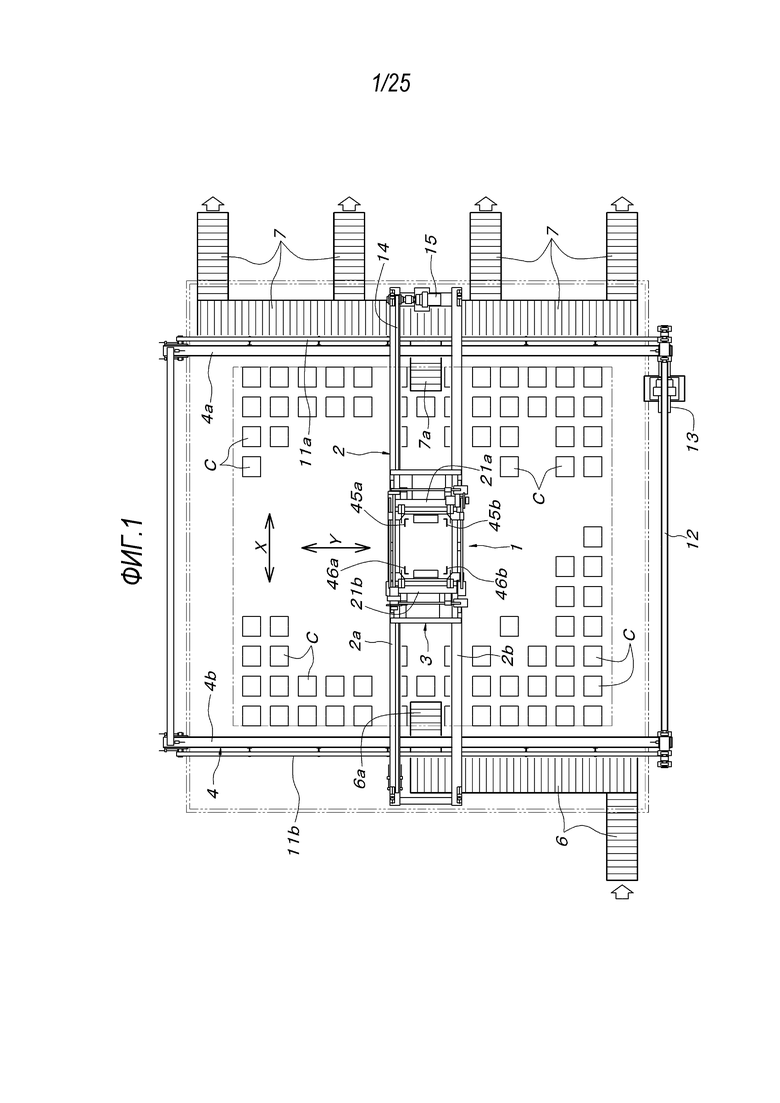
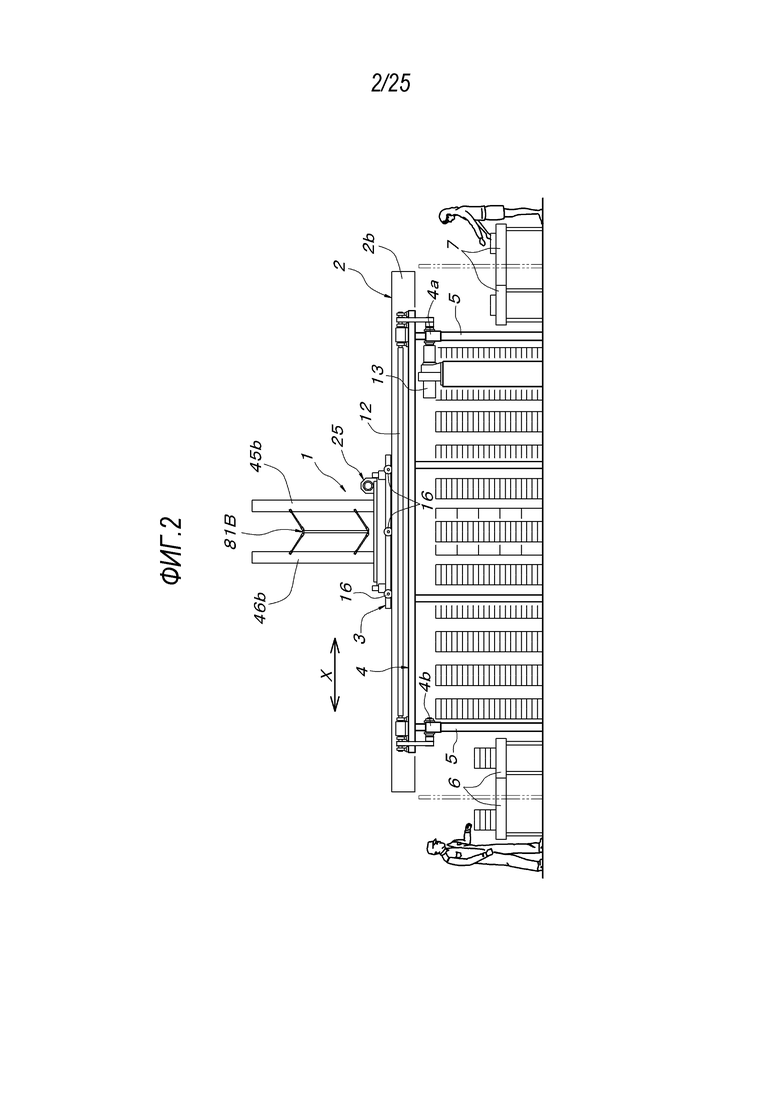
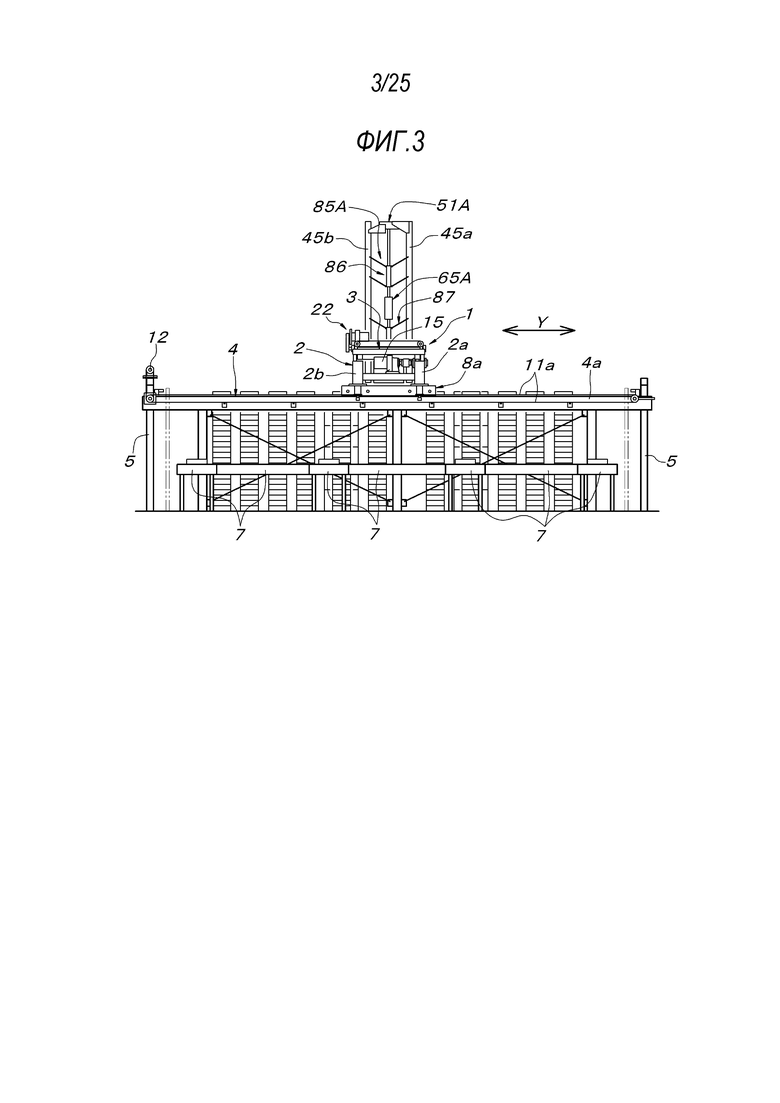

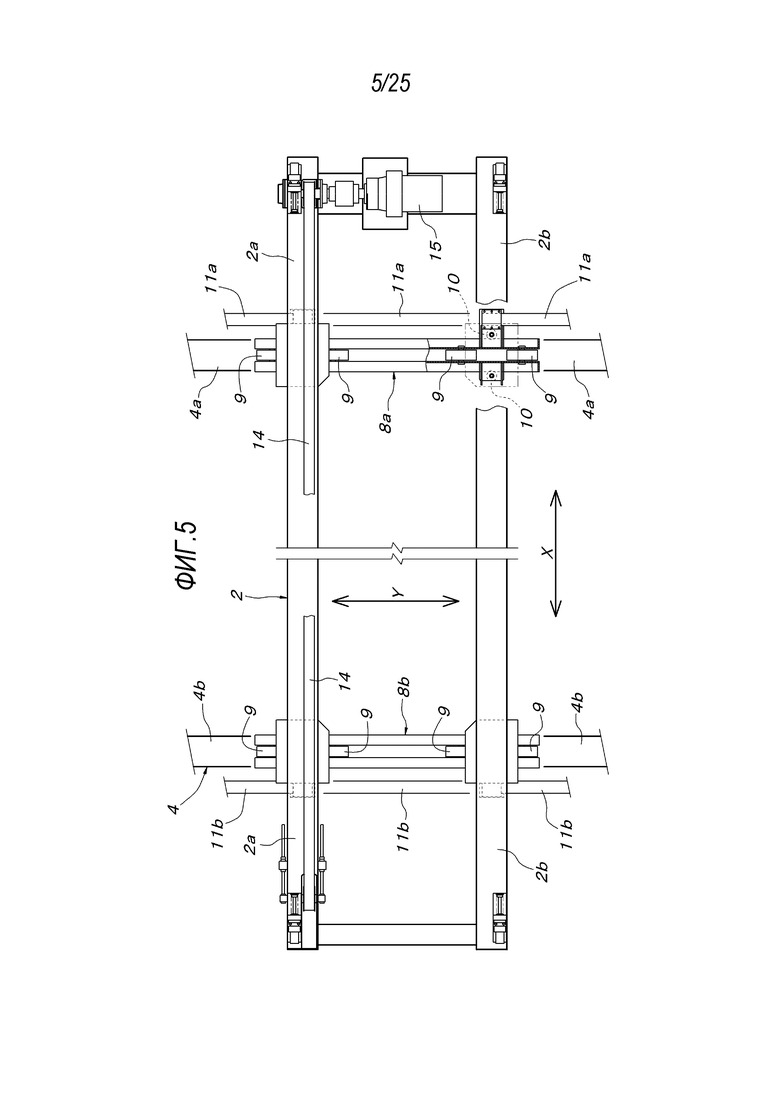
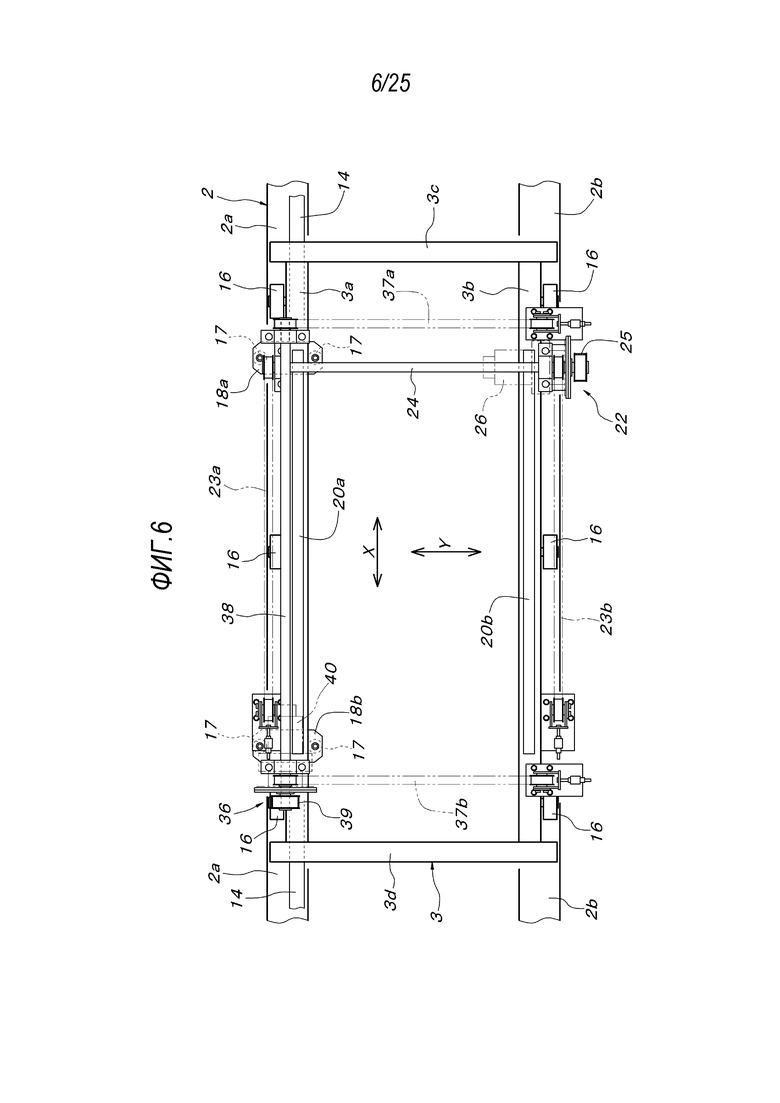
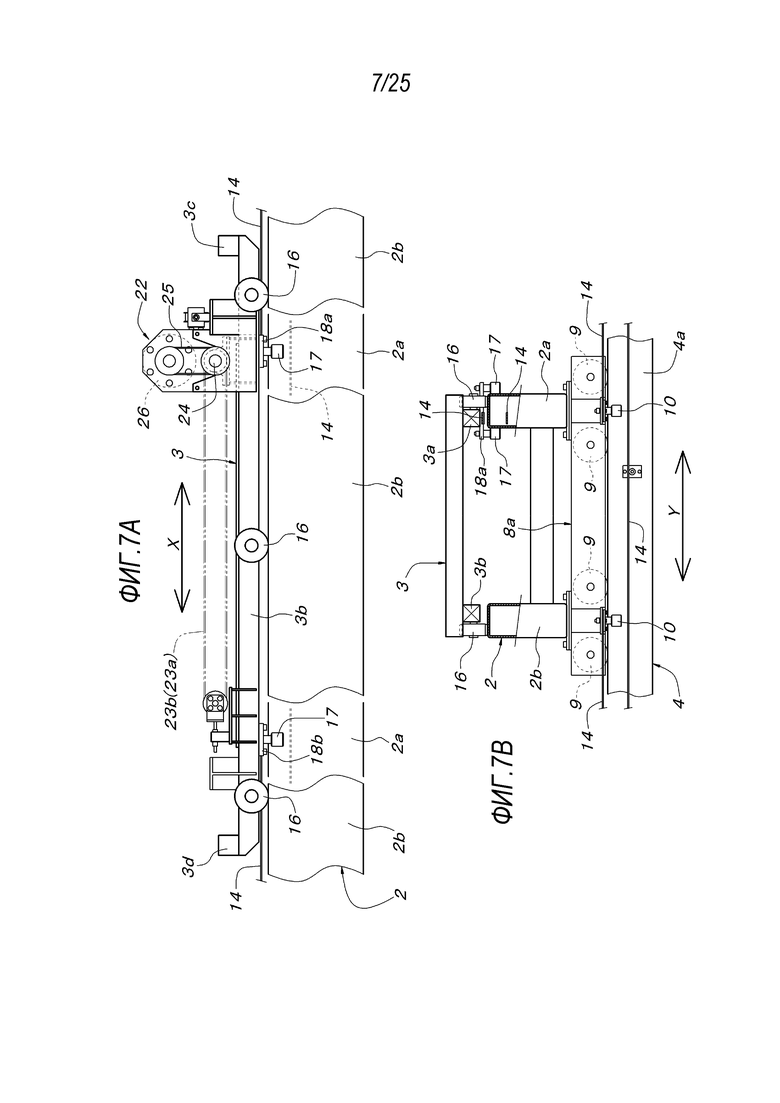
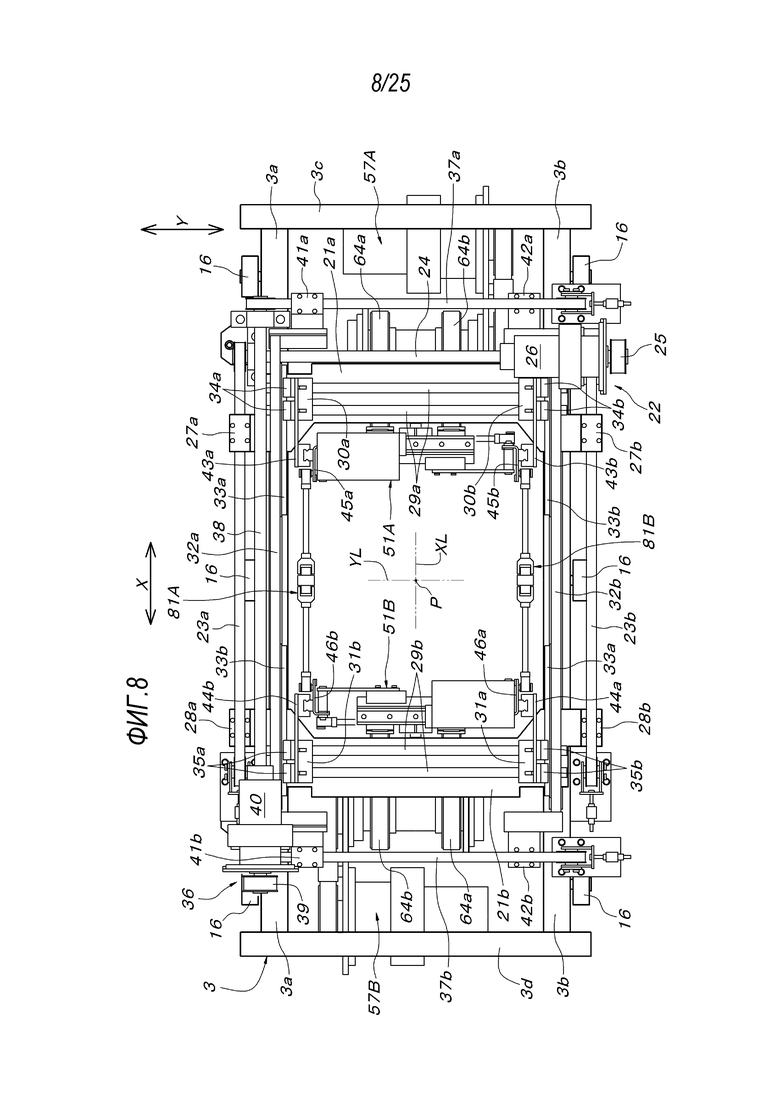
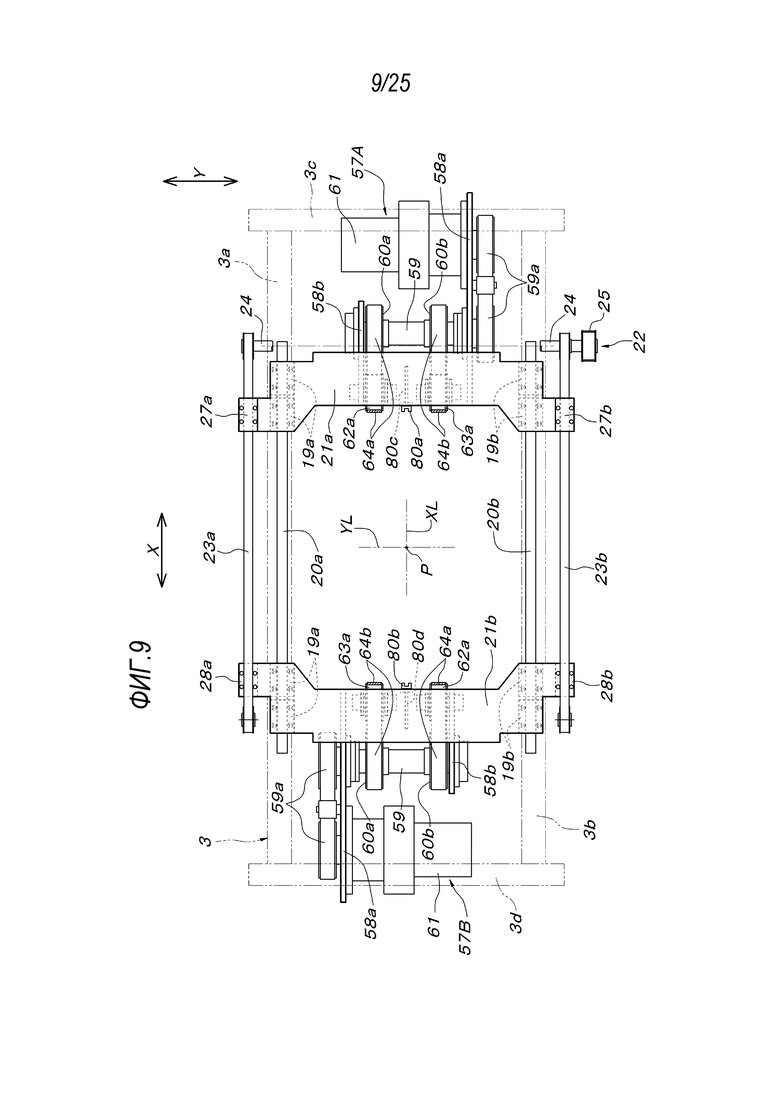
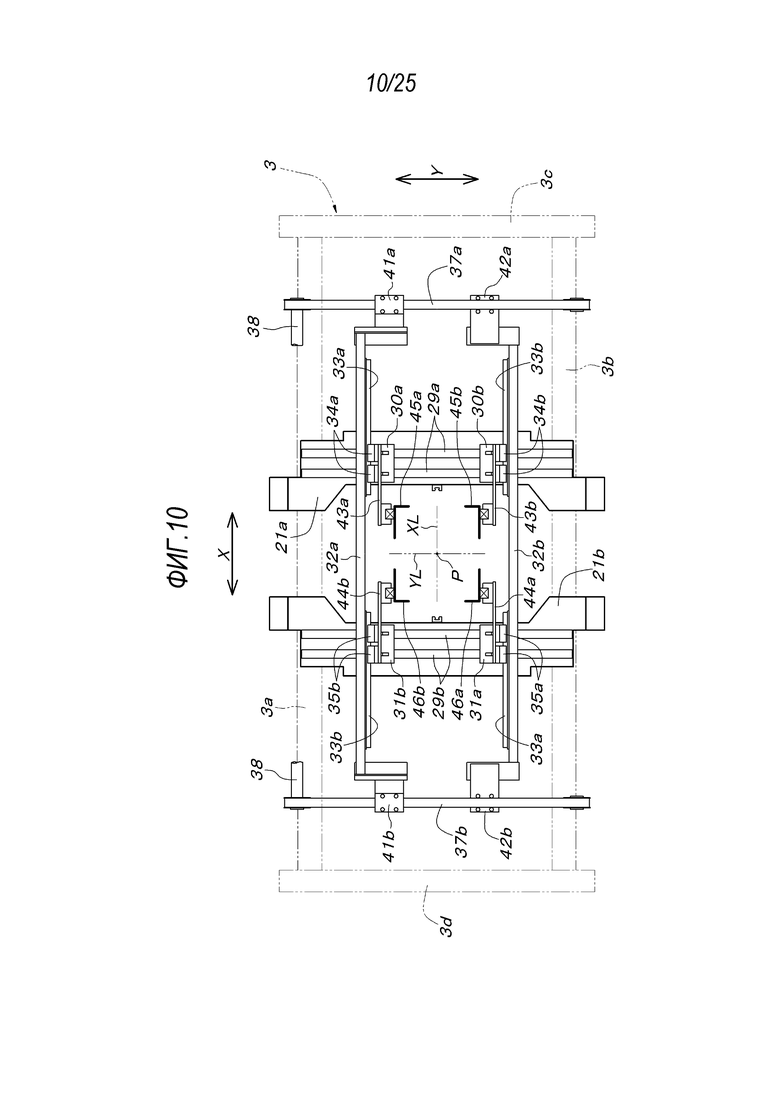
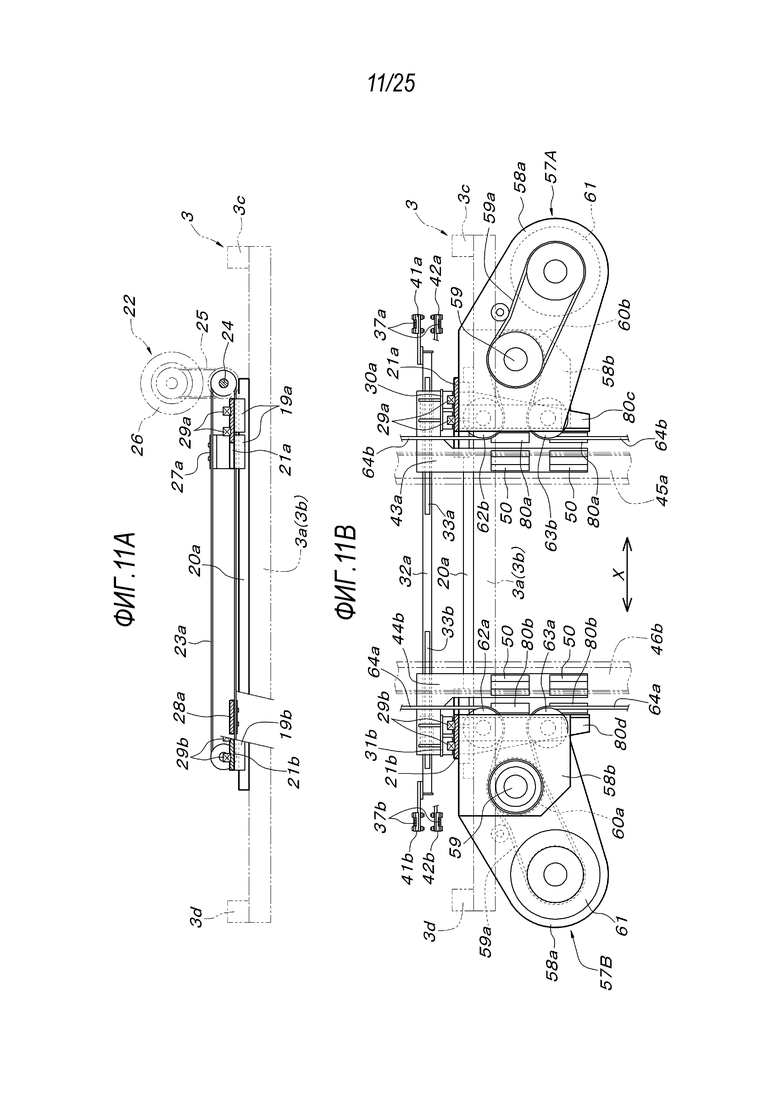
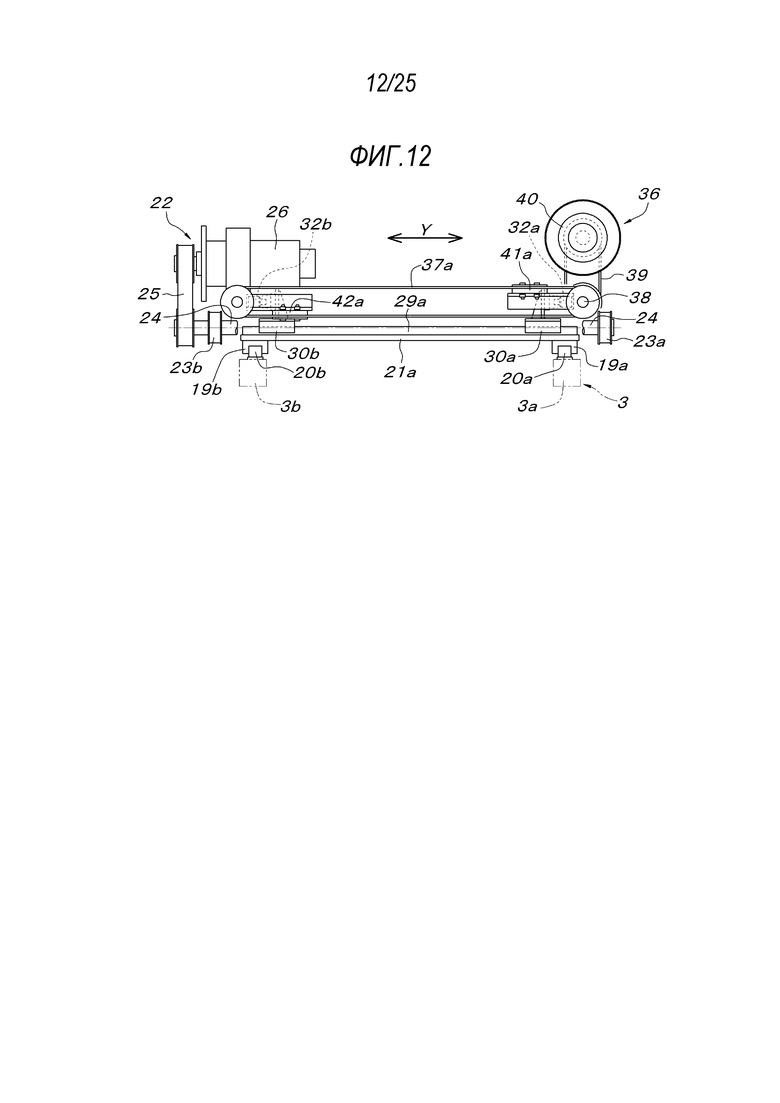
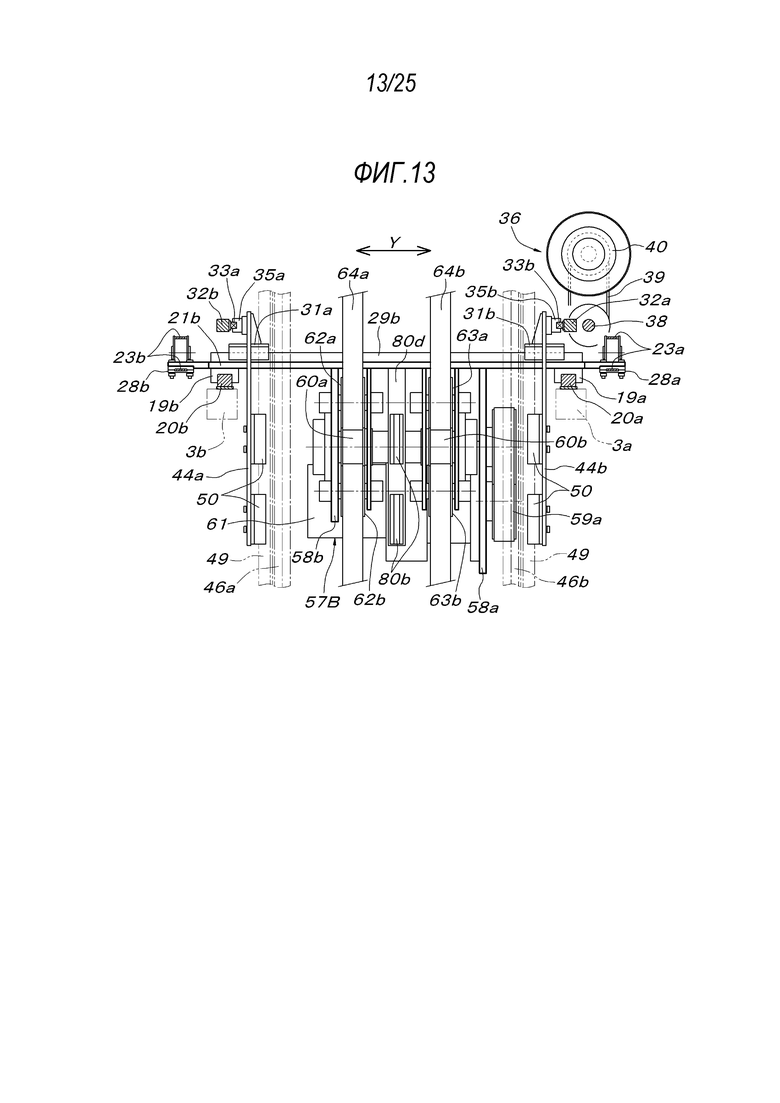
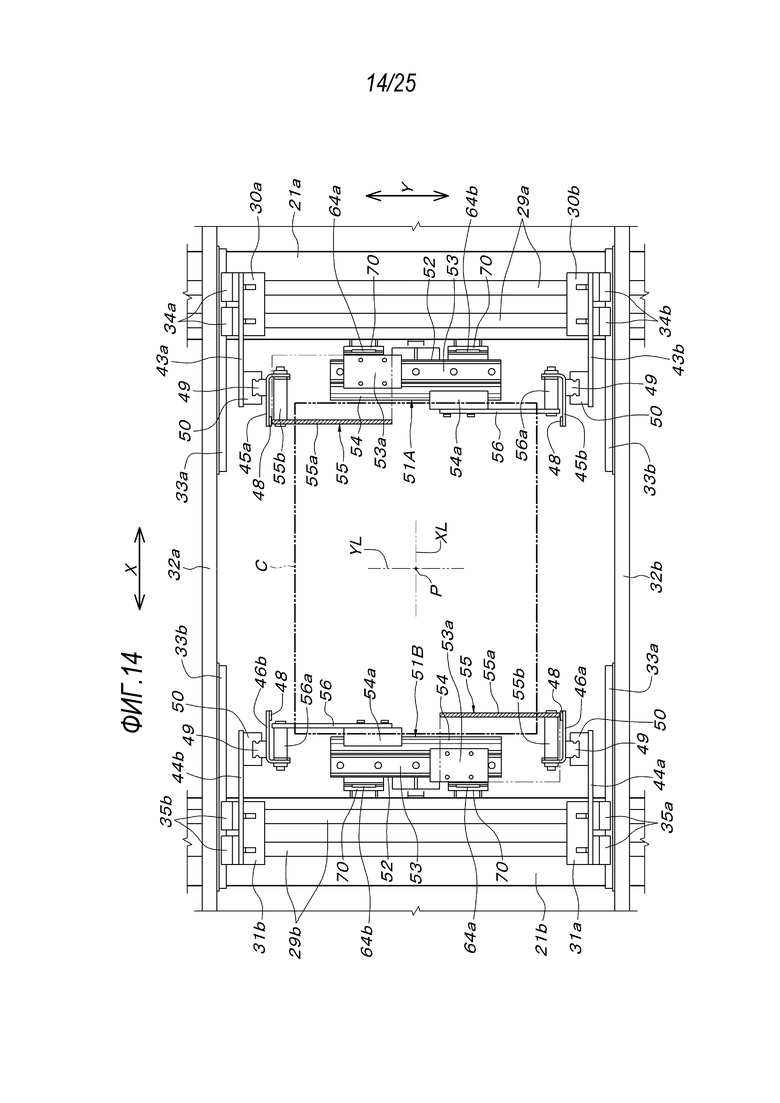
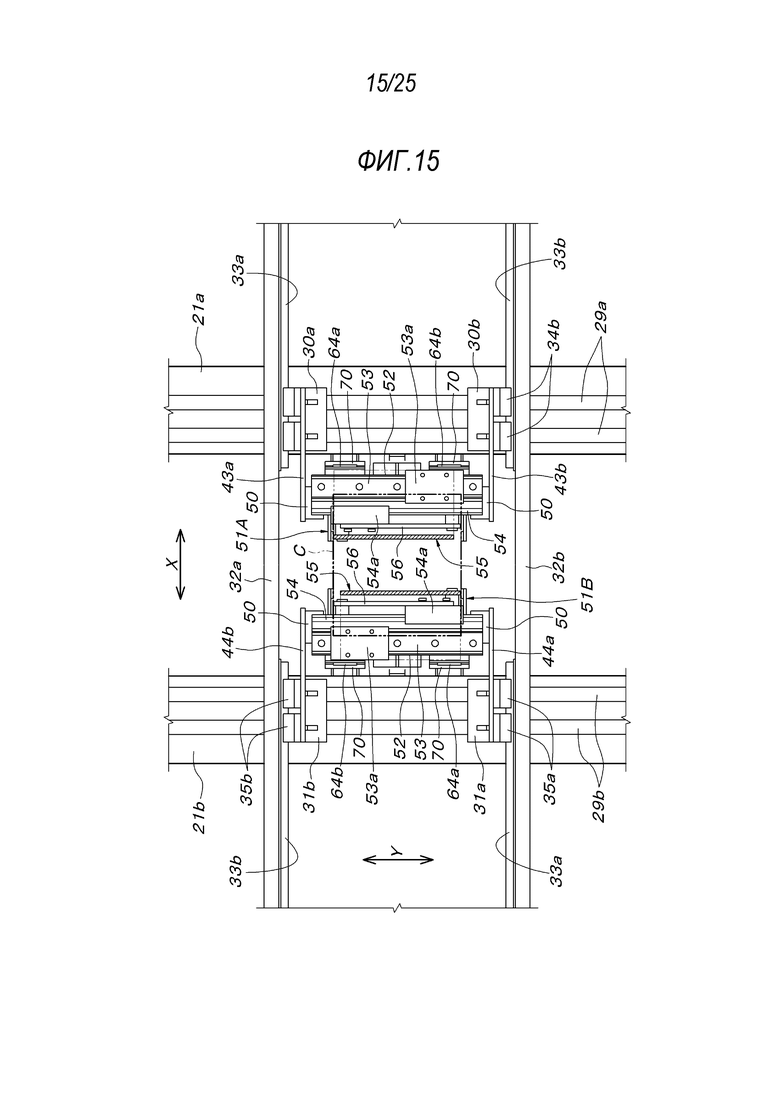
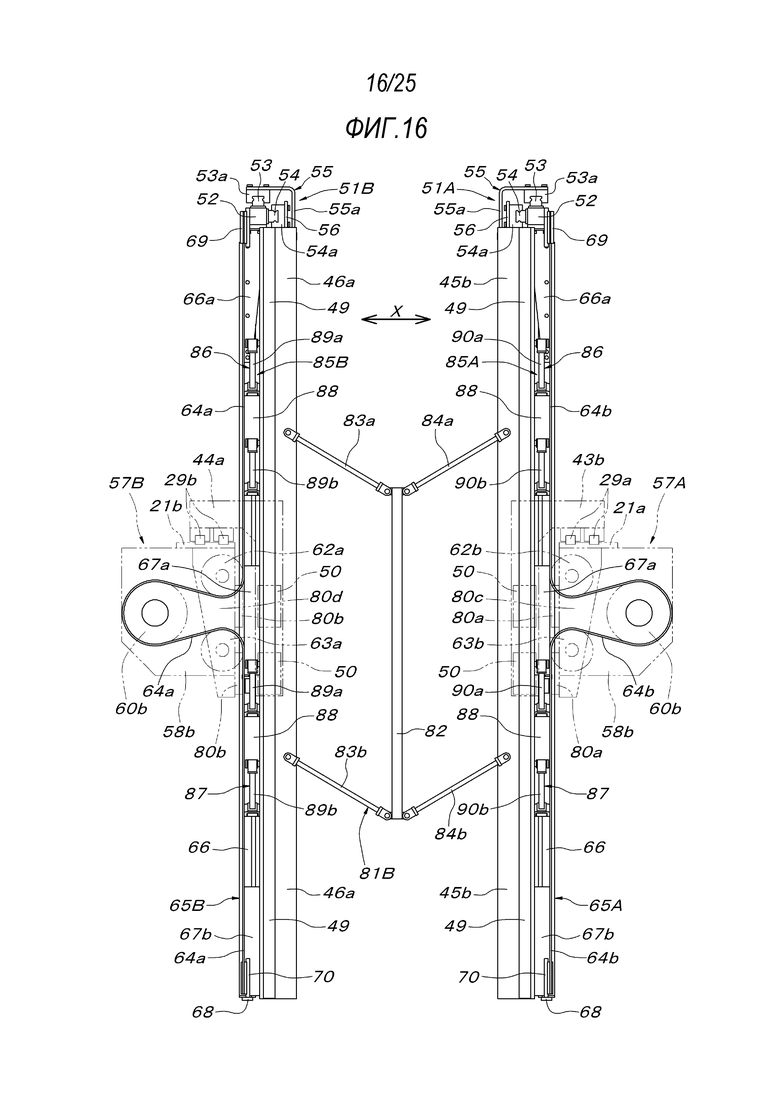
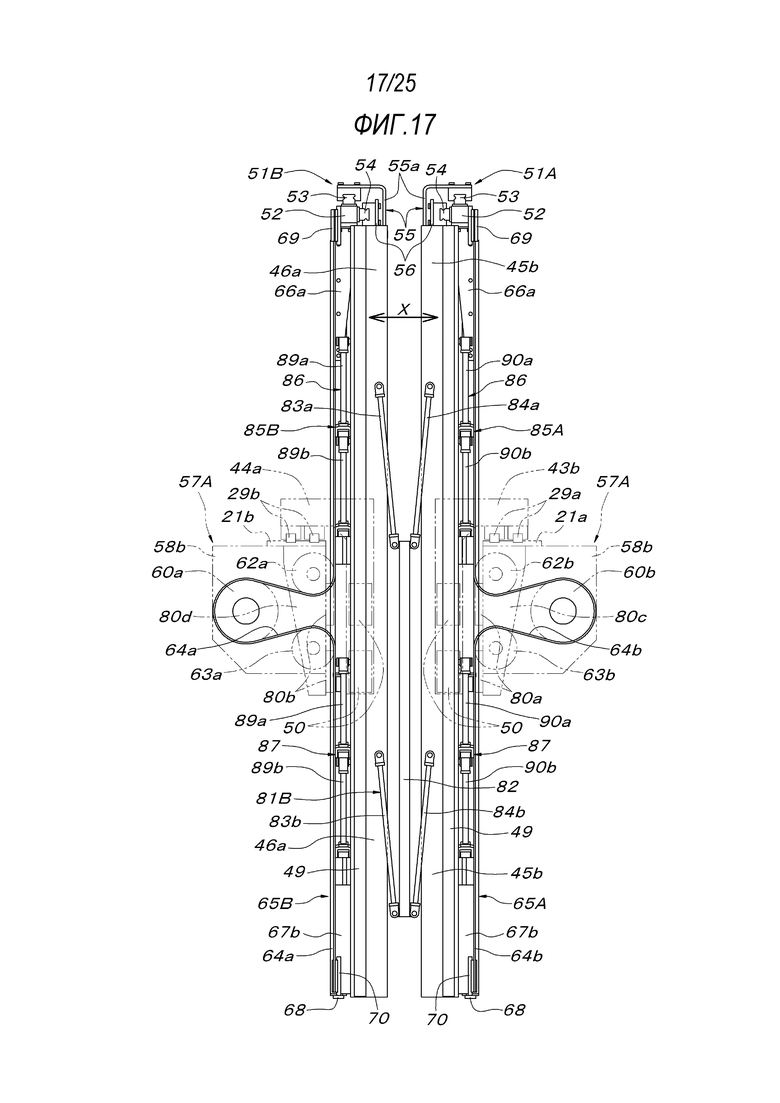
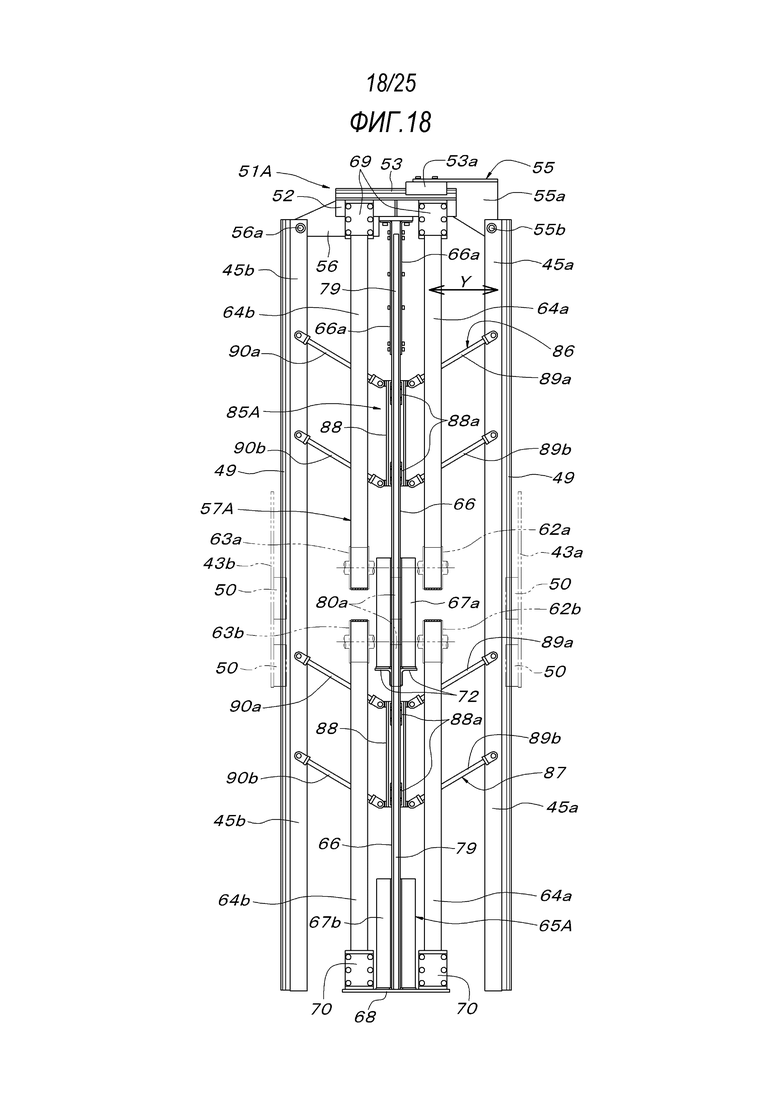
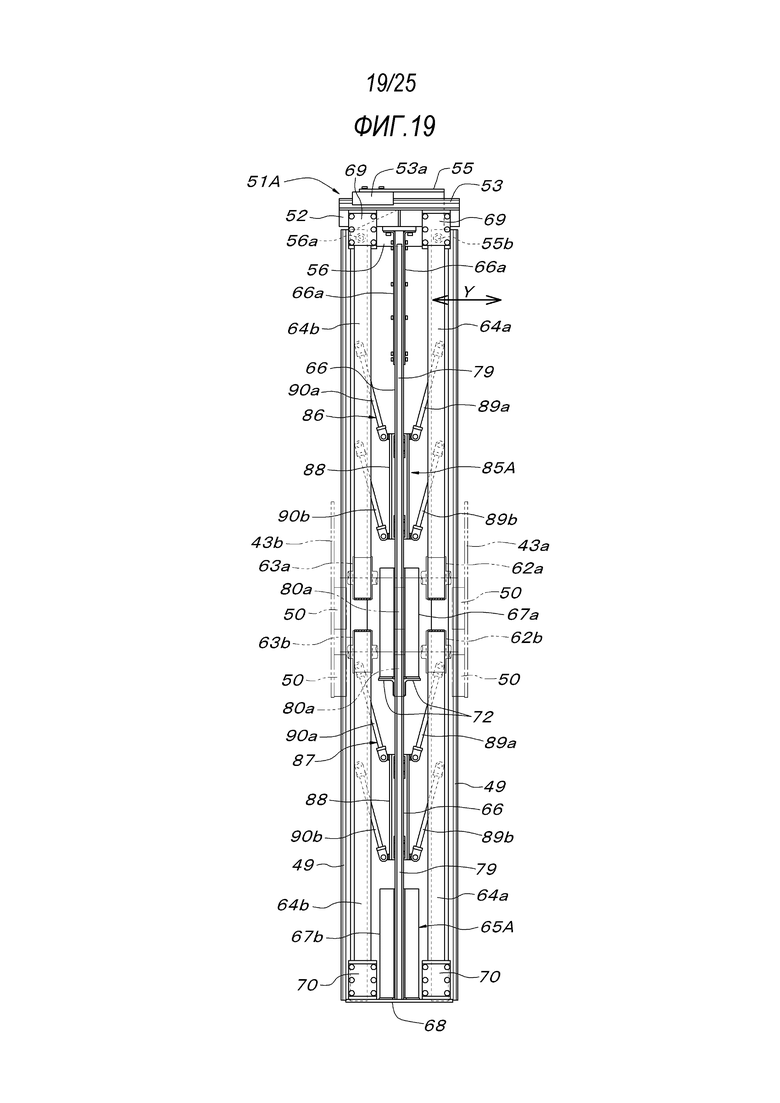
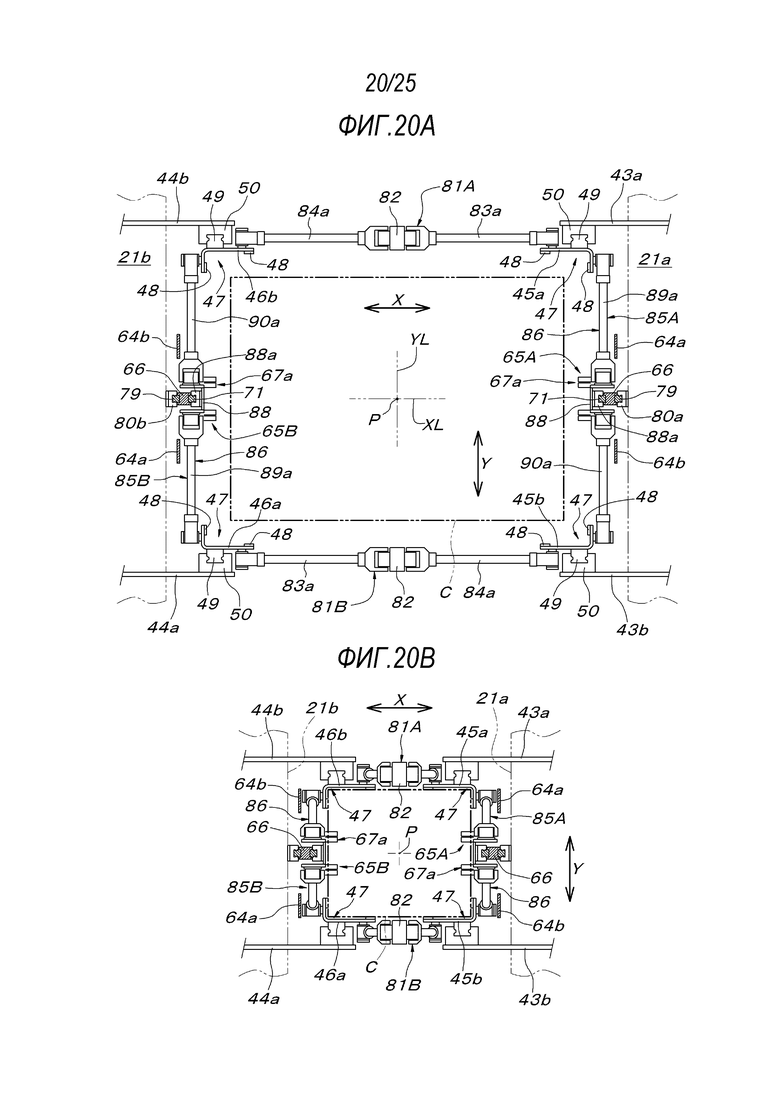
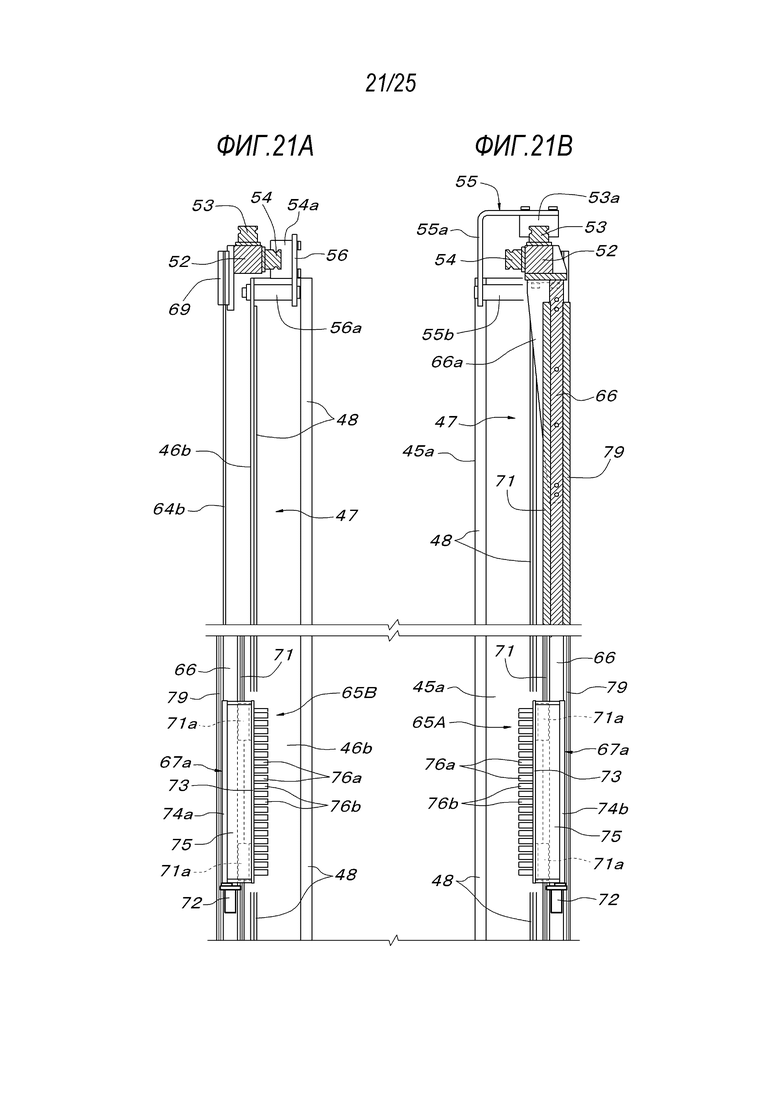
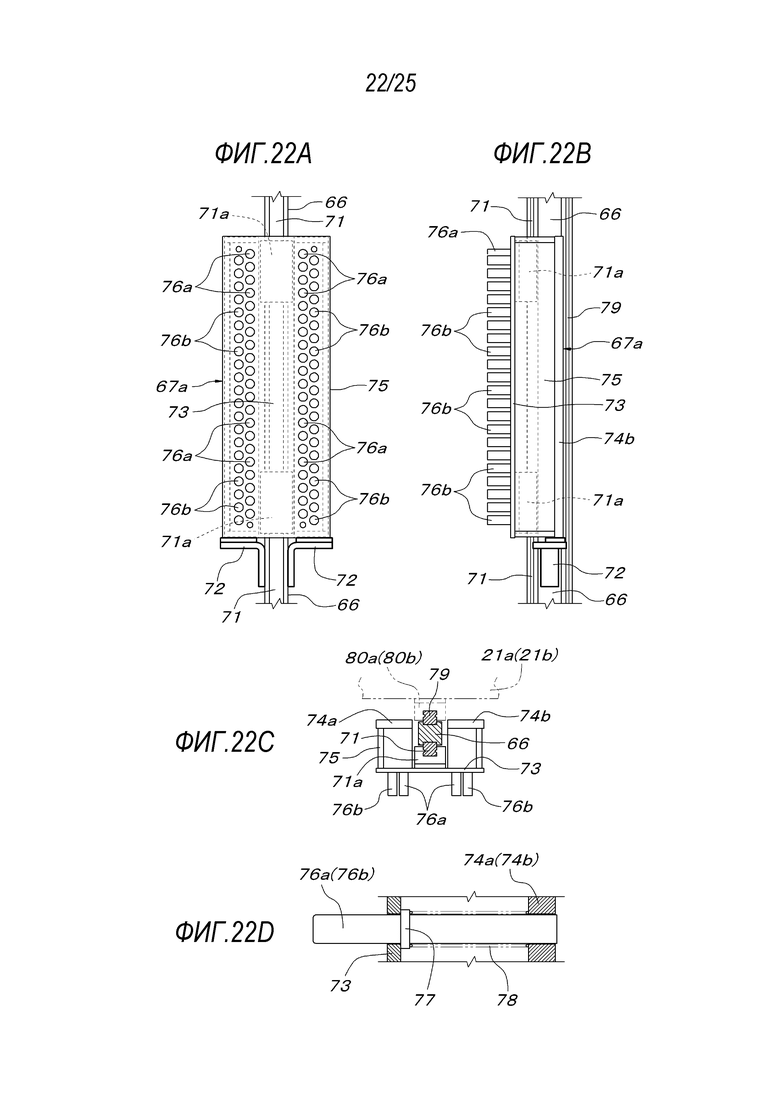
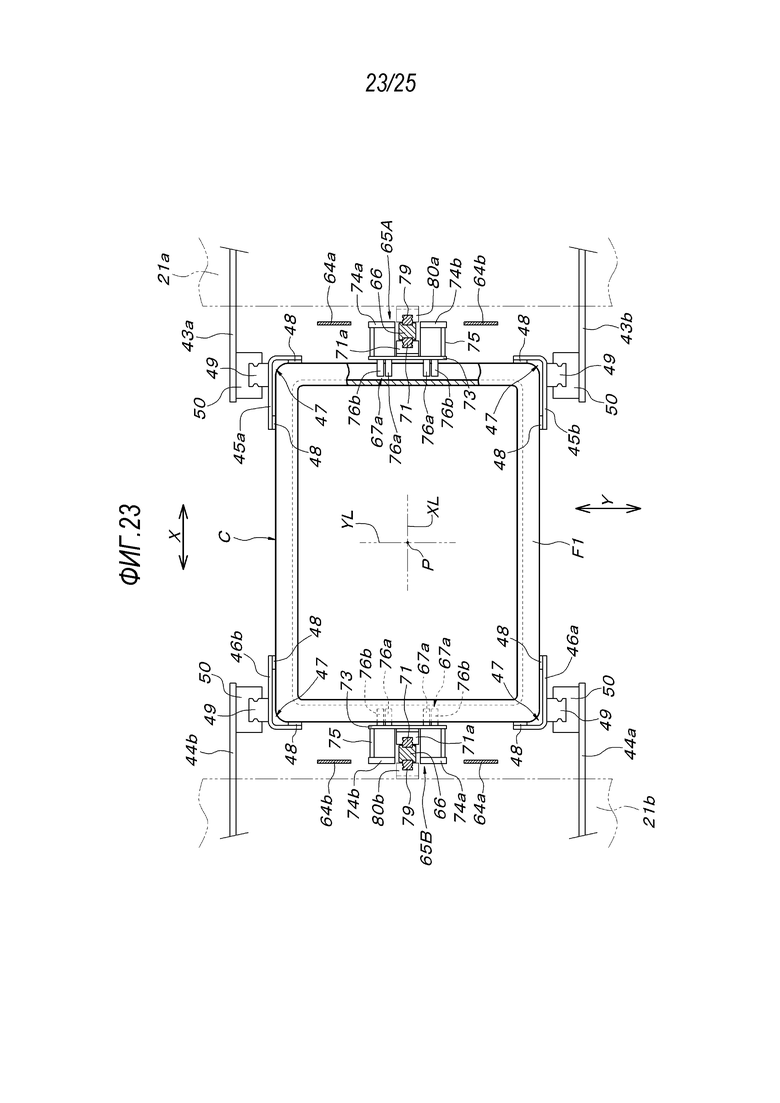
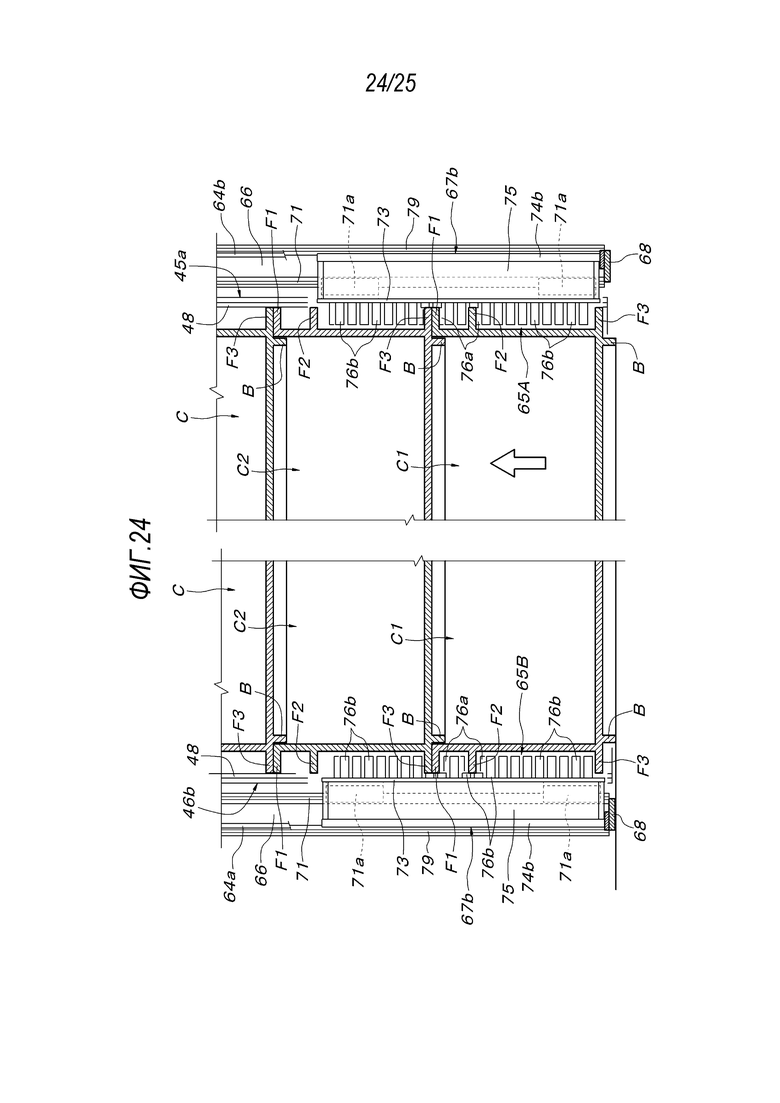
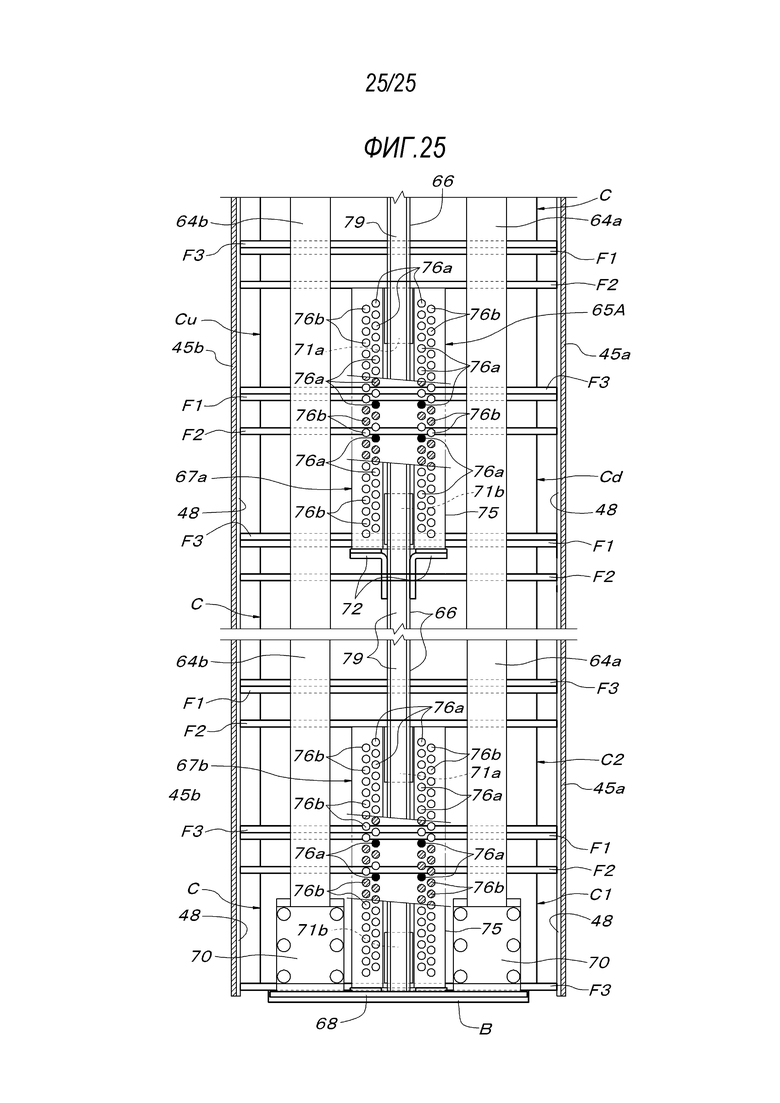
В транспортировочном устройстве для подъема/опускания контейнеров согласно настоящему изобретению по меньшей мере два несущих поднимающихся/опускающихся тела (65A и 65B), взаимосвязанных соответственно с двумя параллельными боковыми поверхностями контейнера (C) для транспортировки изделий, имеющего планарную форму в виде прямоугольного параллелограмма, поддерживаются так, чтобы быть способными подниматься и опускаться, а также быть способными перемещаться ближе друг к другу и дальше друг от друга. К каждому из несущих поднимающихся/опускающихся тел прикреплены опорные блоки (67a), обращенные соответственно к двум параллельным боковым поверхностям контейнера (C). В каждом из опорных блоков (67a) пары пальцеобразных опорных приспособлений (76a и 76b), выступающие в направлении стороны контейнера (C) в симметричных положениях по обеим сторонам вертикальной центральной линии каждой из двух параллельных боковых поверхностей контейнера (C), расположены и поддерживаются с соответствующими интервалами в вертикальном направлении. Каждое из пальцеобразных опорных приспособлений способно выдвигаться и отводиться назад, при этом принудительно приводится в выдвинутое положение и удерживается в нем пружиной. Пары пальцеобразных опорных приспособлений (76a), имеющих узкий интервал между собой, и пары пальцеобразных опорных приспособлений (76b), имеющих широкий интервал между собой, расположены поочередно в вертикальном направлении. Изобретение обеспечивает упрощение управления транспортировочным устройством. 4 з.п. ф-лы, 25 ил. 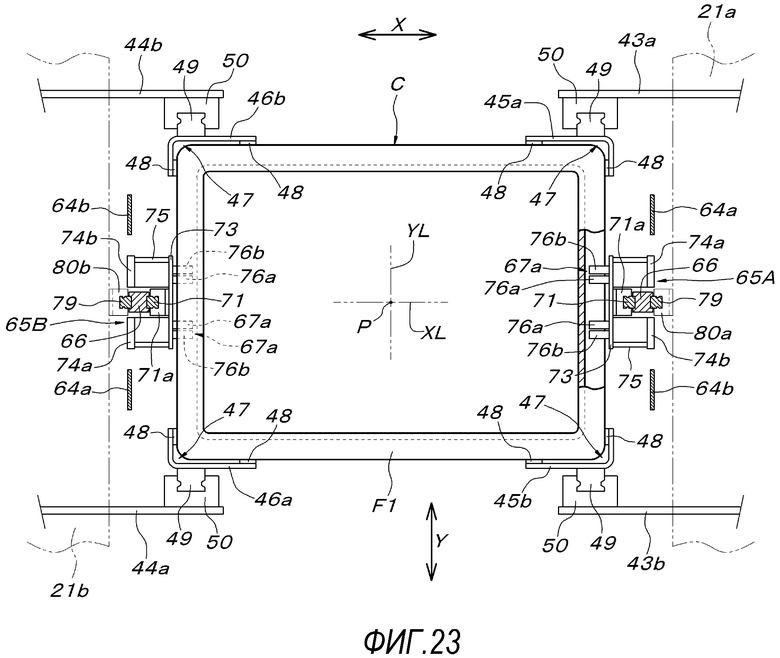
1. Транспортировочное устройство для подъема/опускания контейнеров, отличающееся тем, что по меньшей мере два несущих поднимающихся/опускающихся тела (65A и 65B), соответствующих двум параллельным боковым поверхностями контейнера (C) для транспортировки изделий, имеющим планарную форму в виде прямоугольного параллелограмма, поддерживаются опорной конструкцией так, чтобы быть способными подниматься и опускаться, а также быть способными перемещаться ближе друг к другу и дальше друг от друга, при этом опорные блоки (67a), обращенные соответственно к двум параллельным боковым поверхностям контейнера (C), прикреплены к каждому из несущих поднимающихся/опускающихся тел (65A и 65B), при этом в каждом из опорных блоков (67a) расположены и поддерживаются с соответствующими интервалами в вертикальном направлении пары пальцеобразных опорных приспособлений (76a и 76b), при этом каждая пара выступает в направлении стороны контейнера (C) в симметричных положениях по обеим сторонам вертикальной центральной линии каждой из двух параллельных боковых поверхностей контейнера (C), при этом каждое из пальцеобразных опорных приспособлений (76a и 76b) способно выдвигаться и отводиться назад, при этом принудительно приводится в выдвинутое положение и удерживается в нем пружиной (78), при этом пары пальцеобразных опорных приспособлений (76a), имеющих узкий интервал между собой, и пары пальцеобразных опорных приспособлений (76b), имеющих широкий интервал между собой, расположены поочередно в вертикальном направлении.
2. Транспортировочное устройство для подъема/опускания контейнеров по п.1, в котором пары размещённых на одном уровне пальцеобразных опорных приспособлений (76а), имеющих узкий интервал между собой, и пары размещённых на одном уровне пальцеобразных опорных приспособлений (76b), имеющих широкий интервал между собой, расположены с их чередованием в вертикальном направлении, и
пары пальцеобразных опорных приспособлений (76b), имеющих широкий интервал между собой, расположены с внешней стороны относительно пар пальцеобразных опорных приспособлений (76а), имеющих узкий интервал между собой, на передней стороне опорного блока, и
пары пальцеобразных опорных приспособлений (76b), имеющих широкий интервал между собой, расположены на высоте по центру между верхней и нижней точками пар пальцеобразных опорных приспособлений (76а), имеющих узкий интервал между собой, на виде сбоку, и
верхняя и нижняя части пар пальцеобразных опорных приспособлений (76b), имеющих широкий интервал между собой, и верхняя и нижняя части пар пальцеобразных опорных приспособлений (76а), имеющих узкий интервал между собой, перекрывают друг друга в вертикальном направлении.
3. Транспортировочное устройство для подъема/опускания контейнеров по п.1, в котором множество опорных блоков (67a и 67b) поддерживаются через соответствующий интервал в вертикальном направлении каждым несущим поднимающимся/опускающимся телом (65A или 65B).
4. Транспортировочное устройство для подъема/опускания контейнеров по п.1, в котором соответствующие несущие поднимающиеся/опускающиеся тела (65A и 65B) снабжены вертикальными стержнеобразными основными телами (66), поддерживаемыми опорной конструкцией так, чтобы быть способными подниматься и опускаться, а также быть способными перемещаться ближе друг к другу и дальше друг от друга, при этом каждый опорный блок (67a) способен подниматься и опускаться относительно соответствующего вертикального стержнеобразного основного тела (66) и поддерживается в фиксированном положении по высоте вертикального стержнеобразного основного тела (66).
5. Транспортировочное устройство для подъема/опускания контейнеров по п.4, в котором каждый из опорных блоков (67a и 67b) включает в себя корпус (75), поддерживающий с возможностью распределения пальцеобразные опорные приспособления (76a и 76b) по обеим сторонам соответствующего вертикального основного тела (66) и имеющий установленные внутри пружины (78), при этом вертикальное стержнеобразное основное тело (66), направляющий рельс скольжения (71), уложенный на обращенной к контейнеру поверхности вертикального стержнеобразного основного тела (66), а также скользящий блок (71a или 71b), прикрепленный к корпусу (75) так, чтобы соответствовать направляющему рельсу скольжения (71), выполнены так, чтобы быть введенными на внутреннюю сторону корпуса (75).
| Неразъемная замороженная модель для низкотемпературной формовки | 1983 |
|
SU1121089A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Движитель для колесных повозок | 1933 |
|
SU49885A1 |
| JP 2000238906 A, 05.09.2000 | |||
| US 5354112 A1, 11.10.1994 | |||
| Автоматический аэропланный стабилизатор | 1924 |
|
SU1302A1 |
| Щипцовый захват для подъемного крана | 1948 |
|
SU72981A1 |
| Захват для подъема штабеля штучных грузов | 1975 |
|
SU544601A1 |

