Изобретение касается способа определения ситуации аварийного торможения транспортного средства, устройства управления для выполнения такого рода способа, а также системы регулирования динамики движения, снабженной такого рода устройством управления.
Изобретение касается, в частности, способа оценки опасности наезда сзади при движении по дороге, на которой находится едущий впереди объект, в частности, транспортное средство.
В принципе известно, что для этого составляются уравнения движения, чтобы определить время столкновения при имеющемся в данное время режиме движения собственного транспортного средства и движущегося впереди транспортного средства. Кроме того, в принципе также известно, что во избежание возможных столкновений определяются номинальные замедления.
EP 1539523 B1 или соответственно DE 10258617 B4 описывает способ и устройство для включения автоматического процесса аварийного торможения транспортного средства. При этом определяются собственная скорость и собственное ускорение транспортного средства, и устанавливается минимальное расстояние, являющееся конечным безопасным расстоянием. Кроме того, устанавливается конечная относительная скорость между двумя транспортными средствами, которая должна достигаться с окончанием автоматического процесса аварийного торможения. Дополнительно учитывается определенное имеющееся текущее относительное ускорение между обоими транспортными средствами.
В DE 102006019848 B4 описывается устройство для уменьшения воздействий столкновения транспортных средств, в котором обнаруживают препятствие с его относительным расстоянием и его относительной скоростью, и оценивается возможное столкновение или, соответственно, возможная авария, после чего при необходимости может активироваться средство защиты пассажиров. Такого рода системы известны также как системы предаварийной безопасности.
В JP 2004038245 A1 раскрывается детектор препятствий для транспортных средств, в котором дополнительно учитывается установленная активация рулевого колеса. EP 0891903 B1 описывает автоматическую функцию аварийного торможения, при которой также оценивается возможность обхода препятствия. EP 1625979 B1 описывает способ и устройство для включения аварийного торможения, при которых определяются вероятность столкновения и, кроме того, угроза собственному транспортному средству в случае включения аварийного торможения, и порог включения аварийного торможения может изменяться в зависимости от этой определенной угрозы. EP 1803109 B1 описывает способ определения релевантных объектов в области, близкой к транспортному средству, в котором релевантные для столкновения значения рассчитываются на основании данных датчиков транспортного средства и/или окружающей среды с учетом возможных маневров объезда или процессов торможения.
Недостатком такого рода традиционных способов в общем является то, что зачастую они ограничиваются только частными ситуациями движения и при этом не всегда своевременно способствуют автономному торможению во избежание аварии. Кроме того, включение аварийного торможения при известных условиях может также осуществляться слишком рано и вместе с тем, возможно, без необходимости.
Кроме того, известны разные системы поддержания дистанции без аварийного торможения. Система Bendix-Wigman ACB - Adaptive Cruise System со свойством торможения включает в себя способ поддержания дистанции, предназначенный для поддержания постоянной дистанции до движущегося впереди транспортного средства. При этом могут подаваться предупредительные сигналы индикации, а также сигналы аварийного торможения для автоматического выполнения способа аварийного торможения. Для этого измеряется расстояние до движущегося впереди транспортного средства, например, с помощью радара.
В основе изобретения лежит задача создать способ, соответствующее устройство управления для его выполнения и систему регулирования динамики движения, которые обеспечат возможность надежного распознавания ситуации аварийного торможения и снизят вероятность неоправданного аварийного торможения.
Эта задача решается с помощью способа по п. 1 формулы изобретения и устройства управления по п. 15 формулы изобретения. Зависимые пункты формулы изобретения описывают предпочтительные усовершенствованные варианты осуществления изобретения. При этом дополнительно предусмотрена система регулирования динамики движения, снабженная такого рода устройством управления, или для выполнения способа.
В соответствии с изобретением при этом используются различные способы оценки, чтобы в зависимости от имеющейся в каждом случае текущей ситуации движения использовать надлежащий способ оценки.
В соответствии с первым способом оценки, который представляет собой способ оценки уравнений движения, составляются уравнения движения как собственного транспортного средства, так находящегося перед транспортным средством объекта, и в зависимости от этого оценивается, имеет ли место ситуация аварийного торможения. В зависимости от этой оценки затем может, в частности, рассчитываться необходимое замедление. Уравнения движения могут, в частности, составляться со вторым порядком по времени, то есть включать в себя начальное значение, линейный член и квадратный член, так чтобы могла получиться одна общая система уравнений или, соответственно, одно общее уравнение движения собственного транспортного средства и переднего объекта, из которого может определяться последующее сокращение расстояния ниже минимального и/или столкновение.
Согласно второму способу оценки, в отличие от этого рассматривается тормозной путь, при этом может определяться и оцениваться тормозной путь по меньшей мере собственного транспортного средства.
В основе изобретения лежит идея, что в типичной ситуации движения собственного транспортного средства за движущимся впереди передним объектом ситуация аварийного торможения может определяться с помощью уравнений движения собственного транспортного средства и переднего объекта. Для такого рода способа оценки уравнений движения могут, в частности, составляться уравнения второго порядка по времени, то есть с относительным расстоянием в качестве члена нулевого порядка по времени, скоростями (или, соответственно, относительной скоростью) в качестве членов первого порядка по времени и ускорениями в качестве членов второго порядка по времени. Из этих уравнений движения может, таким образом, получаться система уравнений, с помощью которой определяется, произойдет ли затем приближение на допустимое минимальное расстояние (например, минимальное расстояние, равное 1 метру или же нулю). При этом могут, в частности, дополнительно учитываться значения времени реакции тормозных систем транспортного средства (например, для вентиляции тормозов) и/или водителя, так как изменения, обусловленные активными вмешательствами, оказывают воздействия только по прошествии времени реакции.
В соответствии с изобретением, однако, выяснилось, что такого рода подход, основанный на системе уравнений, в частности, уравнений движения второго порядка по времени, в некоторых ситуациях может приводить к ошибочным оценкам. Уравнения движения второго порядка по времени с отрицательным ускорением, то есть торможением или, соответственно, замедлением собственного транспортного средства или едущего впереди объекта, содержат математически также фиктивное движение задним ходом, следующее за полным остановом транспортного средства или объекта. Однако подобные фиктивные движения задним ходом физически бессмысленны, так как замедление транспортного средства вследствие осуществления торможения или использования замедлителя двигателя (или же, например, трения воздуха) хотя и может приводить к торможению (отрицательному ускорению) положительной скорости до состояния останова, однако ускорение стоящего транспортного средства назад больше не осуществляется. Более того, при останове транспортного средства физически действующий тормозной эффект, то есть отрицательное ускорение, падает до нуля, то есть транспортное средство останавливается, однако движение задним ходом не начинается.
При этом в математической системе уравнений могут определяться фиктивные, однако бессмысленные столкновения, которые возникают во время движения задним ходом, в частности, при фиктивном движении задним ходом едущего впереди переднего объекта.
Поэтому в соответствии с изобретением способ оценки уравнений движения используется только тогда, когда он считается целесообразным. Предпочтительно для выбора подходящего способа оценки используются критерии определения различных ситуаций.
В случае, если определяется, что первый способ оценки, то есть способ оценки уравнений движения, нецелесообразен, в соответствии с изобретением применяется другой способ оценки, при этом предусмотрен по меньшей мере один способ оценки в качестве второго, а именно предпочтительно способ оценки тормозного пути, учитывающий тормозной путь. При этом предпочтительно без использования точных уравнений движения собственного транспортного средства и переднего объекта определяется и оценивается тормозной путь собственного транспортного средства. Предпочтительно задается зависящий от времени критерий допустимости, который сравнивает собственное время торможения первого, собственного транспортного средства со временем торможения переднего, второго объекта, что представляет собой особенно простое определение и констатацию допустимости первого или второго способа оценки. При этом собственное время торможения может определяться предварительно до достижения минимального расстояния при одновременно полном сбросе относительной скорости собственного, первого транспортного средства относительно переднего, второго объекта. Время торможения объекта представляет собой время, которое требуется переднему, второму объекту до останова.
В соответствии с изобретением предварительно может также применяться предшествующий критерий, не достигло ли относительное расстояние минимального расстояния уже по прошествии времени реакции или не сократилось ли ниже него, и, таким образом, не имеет ли уже место ситуация аварийного торможения; это может считаться предшествующим («нулевым») способом оценки, так что первый и второй способ оценки сначала даже не становятся релевантными.
Собственное первое ускорение может измеряться с помощью датчика продольного ускорения и/или с помощью производной по времени собственной, первой скорости. Относительное расстояние до переднего объекта может, в частности, определяться с помощью датчика расстояния. Таким образом, на основании этого по меньшей мере по поведению во времени сигнала относительного расстояния может также определяться вторая скорость объекта и в качестве ее производной по времени второе ускорение объекта. Однако, в принципе, вторая скорость объекта может также, например, регистрироваться путем измерения с помощью радара Доплера. Предлагаемая изобретением оценка ситуации аварийного торможения может в этом случае определяться, в частности, путем определения необходимого замедления собственного транспортного средства.
На графике зависимости пути от времени на основе уравнений движения второго порядка по времени получаются, таким образом, параболы; при отрицательном ускорении, то есть торможении или, соответственно, замедлении, эти параболы имеют ветви, направленные вниз. Соответствующие характеристики скорости образуют прямые при торможении, таким образом, с отрицательным наклоном.
Направленные вниз ветви параболической кривой движения на графике зависимости пути от времени и соответственно отрицательные значения на графике зависимости скорости от времени в соответствии с изобретением оцениваются как физически бессмысленные; такого рода состояния, которые приводят к неправильной оценке, в соответствии с изобретением исключаются посредством надлежащих критериев.
Таким образом, может исключаться тот фиктивный случай, когда переднее транспортное средство при отрицательном ускорении, то есть при замедлении или торможении, при последующем фиктивном движении задним ходом после своего останова инициирует столкновение с собственным транспортным средством.
Чтобы исключить этот случай фиктивного, приводящего к столкновению движения задним ходом, предпочтительно проверяется, какие значения времени или какие тормозные пути требуются объекту и собственному транспортному средству до останова. В случае если собственное транспортное средство достигнет останова раньше или одновременно с передним объектом, по одному из предпочтительных вариантов осуществления изобретения предпочтительно может применяться первый способ оценки. Однако в случае если собственное транспортное средство достигнет останова позднее, чем передний объект, способ оценки уравнений движения предпочтительно не применяется, так как определяется фиктивный случай столкновения при последующем движении задним ходом переднего объекта. Таким образом, получается критерий допустимости для способа оценки уравнений движения, причем при невыполнении критерия в дальнейшем применяется второй способ оценки.
Во втором способе оценки, в принципе, учитываются тормозные пути, а не динамика транспортных средств до их останова, то есть учитываются их точные уравнения движения. При этом, правда, теоретически мог бы наступить случай, когда вследствие фактической динамики собственного транспортного средства столкновение (или сокращение расстояния ниже минимального) наступает до момента останова, хотя при расчетных значениях в момент времени останова поддерживается безопасное расстояние между собственным транспортным средством и передним объектом. В соответствии с изобретением, однако, установлено, что первый и второй способы оценки идеально дополняют друг друга. Такого рода столкновения могут уже регистрироваться с помощью способа оценки уравнений движения. При этом в случае если критерий допустимости способа оценки уравнений движения выполнен, и может использоваться способ оценки уравнений движения, столкновения надежно регистрируются до останова. Однако в случае, если способ оценки уравнений движения из-за невыполнения критерия допустимости использоваться не может, то во втором способе оценки в этом отношении более не может возникнуть неправильное суждение, что хотя в момент времени останова поддерживается надежное расстояние или, соответственно, минимальное расстояние, однако столкновение наступает до этого. Такого рода столкновения были бы зарегистрированы в способе оценки уравнений движения.
Таким образом, создается надежный и выполняемый при относительно небольшой трудоемкости расчетов способ, который также надежно регистрирует различные исходные состояния движения собственного транспортного средства и переднего объекта. При этом также с высокой степенью надежности исключается излишне раннее аварийное торможение с возникающими при этом угрозами как для собственного транспортного средства, так и при известных условиях для едущих позади транспортных средств.
В соответствии с изобретением с помощью этого способа может как включаться автоматическое аварийное торможение, так и подаваться предупредительный сигнал индикации водителю. При точном определении могут учитываться значения времени реакции, которые, таким образом, включают в себя в случае автоматической системы аварийного торможения аппаратно обусловленные значения времени наполнения тормозов и приведения в действие исполнительных элементов, а при подаче предупредительного сигнала индикации водителю дополнительно учитывают также время реакции водителя.
Согласно одному из особенно предпочтительных вариантов осуществления разные случаи иерархически классифицируются. В первом случае может сначала принципиально проверяться, не меньше ли относительное расстояние между собственным транспортным средством и передним объектом по прошествии времени реакции, чем минимальное расстояние, которое должно поддерживаться; в случае если этот первый критерий выполнен, всегда немедленно включается аварийное торможение. Только после этого затем рассматриваются, например, четыре случая, при которых всегда определяется, должен ли применяться первый или второй способ оценки. В этих случаях предпочтительно учитывается ускорение переднего объекта и относительная скорость, в частности, относительная скорость по прошествии времени реакции. Таким образом, можно различать случаи на основании только этих двух параметров, в частности, четыре или пять разных случаев.
В этих случаях может сначала, например, проверяться способ оценки уравнений движения, и в случае, если он не подходит, использоваться второй способ оценки. В двух других случаях может, например, использоваться только способ оценки уравнений движения или второй способ оценки. Кроме того, может иметь место случай, при котором ускорение переднего объекта положительно, а также разность скоростей или, соответственно, относительная скорость положительна, так что может быть установлено, что в целом опасности столкновения нет.
Предлагаемое изобретением устройство управления может, в частности, в зависимости от результата предлагаемого изобретением способа уменьшать крутящий момент двигателя, для чего оно, например, подает сигналы управления устройству управления двигателем.
Ниже изобретение поясняется на нескольких примерах осуществления с помощью прилагаемых чертежей, на которых показано:
фиг. 1 - изображение дорожной ситуации с двумя едущими друг за другом транспортными средствами;
фиг. 2-7 - графики участков пути и скоростей обоих транспортных средств, а также их относительного расстояния при различных начальных условиях.
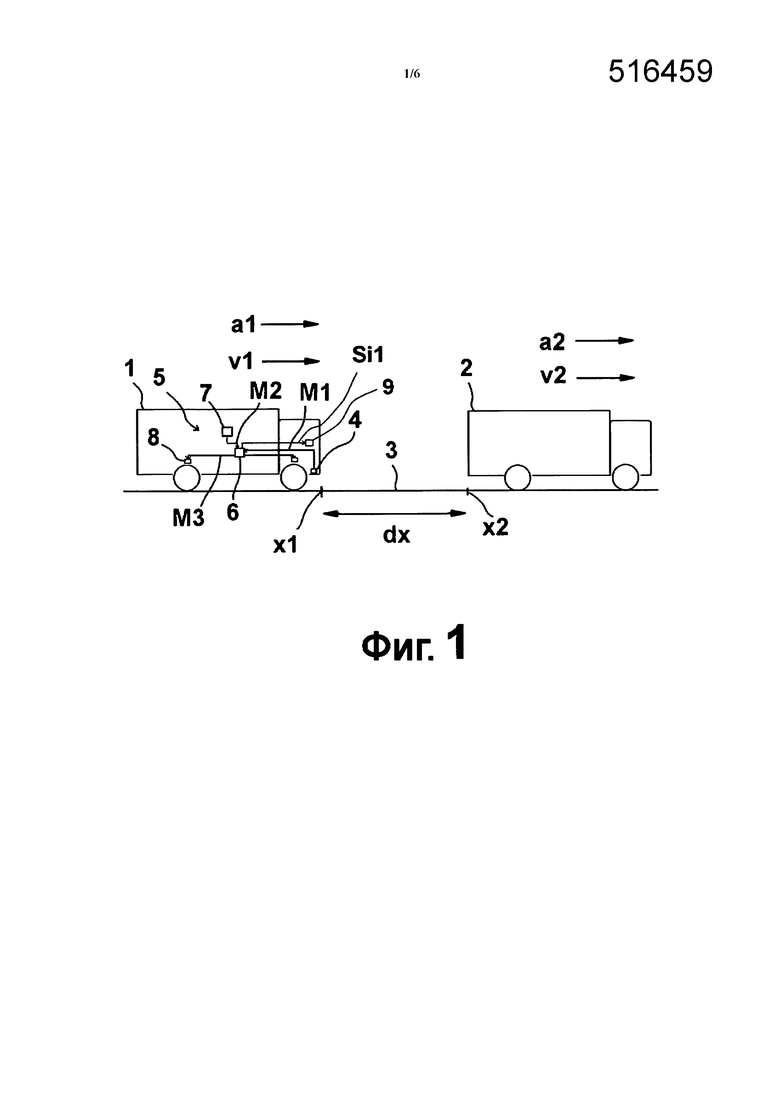
Первое, собственное транспортное средство 1 едет позади переднего объекта 2, в данном случае второго, переднего транспортного средства 2, по проезжей части 3. Далее рассматриваются только движения в общем продольном направлении транспортных средств. Первое, собственное транспортное средство 1 находится в положении x1 и едет со скоростью v1, а также ускорением a1. Процесс торможения представляет собой, таким образом, ускорение a1 с отрицательным значением. Соответственно второе, переднее транспортное средство 2 находится в положении x2, едет со скоростью v2 и вторым ускорением a2. Все параметры x1, v1, a1; x2, v2, a2 зависимы от времени. Затем составляются уравнения движения второго порядка по времени для обоих транспортных средств, первого, собственного транспортного средства 1 и переднего транспортного средства 2. При этом предпочтительно принимается постоянное первое, собственное и второе ускорение a1, a2, по меньшей мере до начала процесса торможения собственного транспортного средства 1.
Собственное транспортное средство 1 имеет датчик 4 расстояния для определения относительного расстояния dx между первым, собственным транспортным средством 1 и передним транспортным средством 2, систему 5 динамики движения, снабженную устройством 6 управления, датчик 7 скорости и управляемые устройством 6 управления тормоза 8 транспортного средства. Датчик 4 расстояния подает сигнал M1 измерения относительного расстояния, соответственно датчик 7 скорости - сигнал M2 измерения скорости устройству 6 управления. При этом датчик 7 скорости может быть также образован датчиками частоты вращения колес антиблокировочной системы тормозов. Кроме того, устройство 6 управления подает сигналы M3 управления торможением на тормоза 8 транспортного средства.
В соответствии с изобретением в зависимости от разных критериев различаются случаи разных сценариев, в которых применяются различные способы оценки или, соответственно, методы оценки для определения, может ли наступить столкновение и когда при необходимости должно начинаться аварийное торможение.
Все расчеты осуществляются в заднем первом, собственном транспортном средстве 1, которое при этом определяет опасность столкновения при наезде (столкновения при наезде сзади, rear-end collision (столкновения при движении задним ходом)) с передним транспортным средством 2. В зависимости от заключения может либо автоматически начинаться аварийное торможение посредством автономной системы аварийного торможения (advanced emergency braking system, AEBS) первого, собственного транспортного средства 1 и/или подаваться предупредительный сигнал Si1 индикации посредством предупредительной сигнализации 9 водителю первого, собственного транспортного средства 1.
Для этих двух случаев может соответственно устанавливаться различное время t1 реакции. В случае автоматической AEBS следует устанавливать более короткое время t1 реакции, которое по существу определяется временем создания тормозного давления в тормозах (вентиляция тормозов). При предупреждении о столкновении (forward collision warning, FCW) водителя следует учитывать, во-первых, время реакции водителя, например, от одной секунды у внимательного водителя до двух секунд у отвлеченного или невнимательного водителя, и дополнительно аппаратно необходимое время для создания внутреннего тормозного давления.
Ниже описаны способы оценки критерия торможения, то есть определение момента времени, в который следует начинать аварийное торможение.
Основная идея при этом заключается в том, чтобы по возможности составить уравнения движения второго порядка первого, собственного транспортного средства 1 и второго, переднего транспортного средства 2 и на их основе определить, следует ли начинать аварийное торможение. Таким образом, составляется график движения или, соответственно, парабола движения, которая при отрицательном ускорении при известных условиях может вести до останова, однако математически в последующих значениях времени описывает также движение задним ходом упомянутого первого собственного транспортного средства 1 и/или упомянутого второго переднего транспортного средства 2. Так как, однако, отрицательное ускорение при тормозном эффекте во время останова первого собственного транспортного средства 1 и второго переднего транспортного средства 2 прекращается и не приводит к движению задним ходом или, соответственно, дальнейшему ускорению в обратном направлении (отрицательном направлении), в соответствии с изобретением различается, регистрируется ли при составлении парабол движения или, соответственно, уравнения движения второго порядка этот физически бессмысленный случай с ситуацией, при известных условиях ошибочно отображающий столкновение (или, соответственно, снижение расстояний ниже минимальных), при последующем фиктивном движении задним ходом. В случае если этот случай может исключаться, составляются уравнения движения второго порядка по времени. Однако в случае, если устанавливается такого рода или соответствующий случай, то в соответствии с изобретением рассматривается тормозной путь.
1. Способ оценки BV1:
Определение критерия торможения из уравнений движения второго порядка.
Положение второго, переднего транспортного средства 2 (объекта) может быть представлено в виде
 Уравнение 1
Уравнение 1
где x2_0 - положение в момент времени t=0.
Соответственно положение собственного, первого транспортного средства 1 представляется следующим образом:
 Уравнение 2
Уравнение 2
При этом x1 относится к передней конечной точке собственного, первого транспортного средства 1; в отличие от этого x2 относится к задней конечной точке, то есть задней части переднего, второго транспортного средства 2, так что относительное расстояние dx непосредственно измеряется датчиком 4 расстояния. При dx=0, таким образом, имеет место столкновение или, соответственно, авария, сопровождающаяся наездом.
Относительное расстояние dx может быть представлено из уравнения 1 и 2 как

Отсюда следует:
 Уравнение 3
Уравнение 3
где dv=v2-v1, то есть относительная скорость, а dx_0=x2_0-x1_0 - относительное расстояние dx_0, определенное в момент времени t=0.
Это уравнение описывает, таким образом, относительное движение между первым, собственным транспортным средством 1 и вторым, передним транспортным средством 2. Чтобы в наиболее поздний возможный момент времени все еще избежать столкновения между первым, собственным транспортным средством 1 и вторым передним транспортным средством 2, в соответствии с изобретением применяется следующий подход.
Определяется (отрицательное по величине) ускорение a1 собственного транспортного средства 1, чтобы довести относительную скорость dv до нуля, когда одновременно достигается допустимое минимальное расстояние dx_min, то есть dx=dx_min. Идея изобретения заключается в том, чтобы при относительной скорости dv=0 больше не происходило приближение первого собственного транспортного средства 1 ко второму переднему транспортному средству 2, что должно произойти при достижении минимального расстояния dx_min.
Таким образом, когда в уравнение 3 подставляются оба этих условия dv=0 и dx=dx_min, получается следующее значение первого номинального ускорения a1_d_1:
 Уравнение 4
Уравнение 4
При этом значение a1_d_1 называется «первым» номинальным ускорением и снабжено дополнением «_1», так как оно определяется согласно первому способу оценки BV1, то есть способу оценки уравнений движения.
Чтобы рассчитать необходимое первое номинальное ускорение a1_d_1 собственного транспортного средства 1, определяется относительная скорость dv_t1 по прошествии времени t1 реакции. При этом в приведенных выше уравнениях, таким образом, принимается, что между моментом времени t=0 и t=t1 ускорения a1 и a2 постоянны. Таким образом, получается:
 Уравнение 5
Уравнение 5
Кроме того, для определения первого номинального ускорения a1_d_1 определяется относительное расстояние dx_t1 по прошествии времени t1 реакции. Для этого снова принимается, что ускорения a1 и a2 постоянны. При этом на основании относительного расстояния dx или, соответственно, dx_0, определенного в момент времени t=0 датчиком 4 расстояний, может рассчитываться dx_t1 следующим образом:
 Уравнение 6
Уравнение 6
Таким образом, на основании dv_t1 и dx_t1 необходимое первое номинальное ускорение a1_d_1 собственного транспортного средства 1 может рассчитываться следующим образом:
 Уравнение 7
Уравнение 7
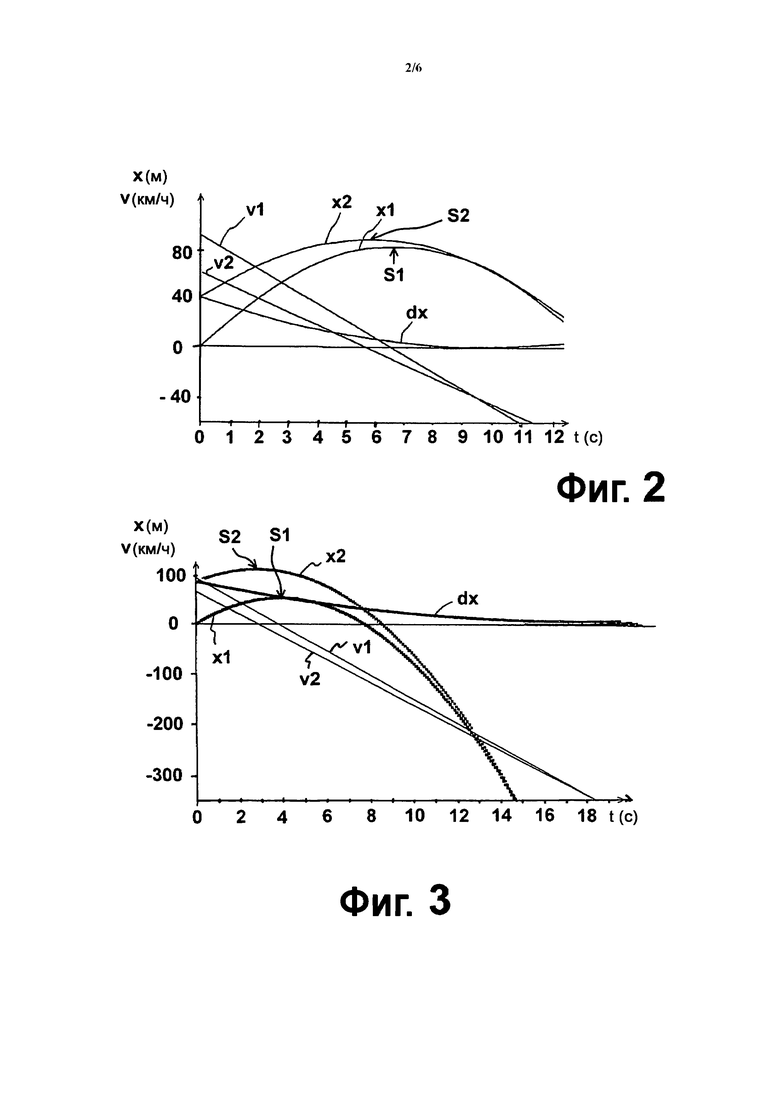
Это уравнение 7 используется в следующем примере для расчета необходимого первого номинального ускорения a1_d_1. В этом примере движущееся впереди второе переднее транспортное средство 2 ускоряется со вторым ускорением a2=-3 м/с2, то есть переднее, второе транспортное средство 2 тормозит при второй начальной скорости v2=60 км/ч. Собственное, первое транспортное средство 1 имеет начальную скорость, равную v1=90 км/ч. Минимальное расстояние dx_min устанавливается 1 м, относительное расстояние dx_t0 в момент времени t=0 между первым собственным транспортным средством 1 и вторым передним транспортным средством 2 определяется датчиком 4 расстояния как dx_0=60 м. При времени t1=1 с реакции в этом примере посредством уравнения 7 получается необходимое первое номинальное ускорение a1_d_1=-4,3 м/с2. Получающиеся на основании этого кривые движения первого собственного транспортного средства 1 и второго переднего транспортного средства 2 показаны на фиг. 2.
При этом кривые первой скорости v1 и второй скорости v2 линейно спадают и достигают нулевой линии. Кривые пути x1 и x2 образуют параболы с ветвями, направленными вниз, которые сначала поднимаются каждая до своей вершины S1 или, соответственно, S2, при которой, таким образом, также v1 или, соответственно, v2 становятся равными 0; правая сторона парабол в соответствии с изобретением оценивается как физически бессмысленная, так как она всегда соответствует фиктивному движению задним ходом.
В выбранном примере по прошествии t=5,5 c достигается останов второго переднего транспортного средства 2, то есть v2 (t=5,5 c)=0. Собственное транспортное средство 1 достигает останова v1=0 при t=6,8 с.
В этом примере, таким образом, после t=5,5 c, то есть фиктивного движения задним ходом второго переднего транспортного средства 2, начинается недопустимая область на этом графике.
В этом примере на фиг. 2 точка, при которой условия dv=0 и dx=dx_min выполнены, расположена при t=9,7 с, когда эти две прямые v1 и v2 пересекаются. Эта фиктивная точка пересечения лежит, однако, уже в недопустимой области, причем даже обе скорости транспортных средств отрицательны при v1=v2=-44,8 км/ч, то есть соответственно в области фиктивного движения задним ходом. Таким образом, этот результат в соответствии с изобретением оценивается как недопустимый.
Сравнение вершин S1 и S2, то есть положений x1 (v1=0)=94,8 м и x2 (v2=0)=107,1 м, однако, показывает, что с этим результатом для a1_d_1 в этой ситуации столкновение было бы предотвращено. Относительное расстояние dx между двумя транспортными средствами 1 и 2, в момент времени останова составляющее 107,1 м - 94,8 м=12,3 м, больше, чем предполагаемое минимальное значение dx_min, из чего следует, что торможение или, соответственно, ускорение с a1_d_1 было бы слишком сильным, то есть представляет собой слишком сильное тормозящее воздействие. Таким образом, автономная система торможения активировалась бы слишком рано.
Недостаточность этого первого способа или, соответственно, первого подхода проявляется, в частности, в ситуациях, в которых, например, вначале, то есть при t=0, имеют место большое относительное расстояние dx между первым, собственным транспортным средством 1 и вторым, передним транспортным средством 2 и сильное торможение переднего транспортного средства 2; в таких ситуациях, таким образом, быстрее наступает фиктивное движение задним ходом переднего транспортного средства 2 с последующим фиктивным столкновением при движении задним ходом переднего транспортного средства 2. На фиг. 3 показана ситуация, измененная по сравнению с фиг. 2; в отличие от фиг. 2 скорости v2=60 км/ч, v2=90 км/ч в момент времени t=0 и минимальное расстояние dx_min=1 м постоянны. Однако переднее транспортное средство 2 теперь уже ускоряется с a2=-6м/с2, то есть с более сильным торможением, а начальное относительное расстояние dx_0 между транспортным средством 1 и 2 составляет dx_0=90 м. В этом случае из уравнения 7 получается первое номинальное ускорение a1_d_1, равное -7,3 м/с2. Кривые ускорения показаны на фиг. 3.
В этом примере согласно фиг. 3 показано сравнение положений транспортных средств в их вершинах S1 и S2, то есть x1 (v1=0)=68,9 м и x2 (v2=0)=114 м, что составляет относительное расстояние dx при останове между ними 45,1 м. Точка, в которой выполняются условия dv=0 и dx=dx_min, лежит, в свою очередь, в недопустимой области, после того как второе транспортное средство 2 пришло в состояние останова, то есть при t=11,8 с, v2=-195 км/ч, аналогично приведенному выше примеру согласно фиг. 2.
В соответствии с изобретением, таким образом, этот подход, в котором используются уравнения движения второй степени по времени с краевыми условиями, и согласно относительная скорость dv=0 (одинаковая скорость транспортных средств) при одновременно установившемся минимальном расстоянии dx_min достигается путем торможения, для такого рода случаев не используется или, соответственно, отбрасывается.
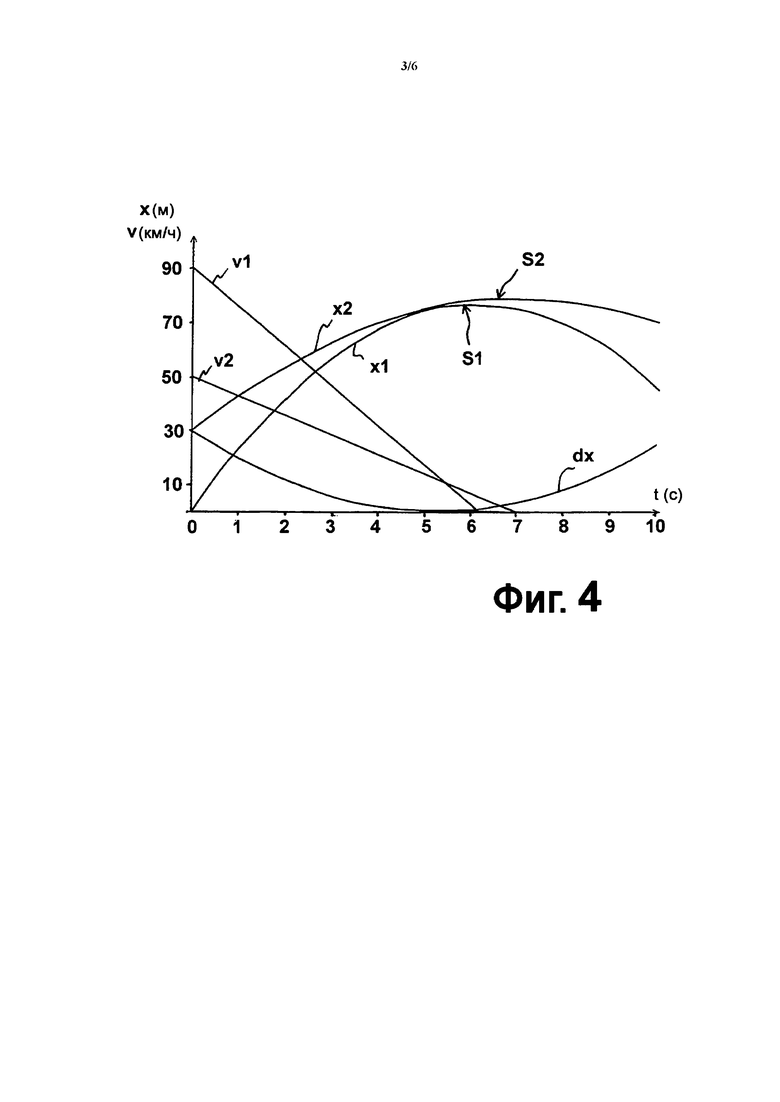
На фиг. 4 показан другой пример, в котором условия dv=0 и dx=dx_min не достигнуты, прежде чем переднее транспортное средство 2 не придет в состояние останова. Переднее транспортное средство 2 тормозит с a2=-2 м/с2 с начальной второй скорости, равной v2=50 км/ч. Собственное транспортное средство 1 имеет начальную скорость, равную v2=90 км/ч. Значение dx_min устанавливается равным 1 м, а начальное относительное расстояние dx_0 между двумя транспортными средствами 1, 2 составляет dx_0=40 м. Время реакции снова составляет около t1=1 с. В этом примере из уравнения 7 получается значение a1_d_1, равное -5,2 м/с2. Результирующие движения показаны на фиг. 4. Переднее транспортное средство 2 через t=7 с приходит в состояние останова. Условия dv=0 и dx=dx_min выполняются при t=5,1 с. В этой ситуации результат представляет собой момент времени, который лежит в разрешенной области; уравнения 3 и 4 отображают реальные движения двух транспортных средств 1, 2 с v1, v2>0. Таким образом, значение a1_d_1, которое рассчитывается на основе уравнения 7, в этой ситуации фиг. 4 представляет собой допустимое значение, которое может использоваться для оценки ситуации.
Таким образом, в соответствии с изобретением может применяться такой подход, что уравнение 7 дает допустимые значения до тех пор, пока оба транспортных средства 1, 2 еще движутся, то есть еще не достигли состояния останова. В отличие от этого результаты становятся недопустимы, когда одно из транспортных средств 1, 2 приходит в состояние останова.
На графическом изображении фигур недопустимая область начинается, таким образом, тогда, когда параболическая кривая пути x1 или x2 одного из транспортных средств 1, 2 достигает своей вершины S1 или S2; соответственно прямые скорости в этом случае пересекают каждая нулевую точку или, соответственно, нулевую ось.
Поэтому в соответствии с изобретением устанавливается критерий Zk1 допустимости для проверки допустимости этого первого метода оценки. Для этого собственное время t1_dv торможения, которое требуется собственному транспортному средству 1 до наступления условий dv=0 и dx=dx_min, сравнивается со временем t2_stop торможения объекта, которое требуется второму транспортному средству 2 для торможения до останова. Когда критерий Zk1 допустимости t1_dv≤t2_stop выполнен, обеспечивается то, что ситуация должна оцениваться соответственно фиг. 4, то есть собственное транспортное средство 1 достигает dv=0 и dx=dx_min, прежде чем переднее транспортное средство 2 приходит в состояние останова. Таким образом, при этом получается допустимый результат, то есть способ оценки уравнений движения (первый способ оценки) является допустимым.
Время t2_stop торможения объекта рассчитывается на основе его текущей второй скорости v2 и второго ускорения a2:
 Уравнение 8
Уравнение 8
Необходимое собственному транспортному средству 1 собственное время t1_dv торможения основано на результате a1_d_1 уравнения 7 и может рассчитываться как
 Уравнение 9
Уравнение 9
Таким образом, получаются следующие критерии оценки допустимости или, соответственно, достоверности.
Когда критерий Zk1 допустимости выполнен, то есть t1_dv≤t2_stop, то первое номинальное ускорение a1_d_1 действительно или, соответственно, допустимо, то есть способ BV1 оценки уравнений движения (первый способ оценки) с помощью уравнения 7 допустим.
Когда t1_dv>t2_stop, то a1_d_1 недопустимо.
Чтобы можно было соответственно регистрировать эти недопустимые ситуации, при которых описанное выше определение не приводит к допустимому результату, и определять второе, в этом случае допустимое номинальное ускорение или, соответственно, необходимое замедление a1_d_2, используется следующий второй способ BV2 оценки или, соответственно, метод оценки
Второй способ BV2 оценки
Во втором способе BV2 оценки рассчитывается расстояние, которое имеется у собственного транспортного средства 1 до останова позади переднего транспортного средства 2.
На основании этого расстояния рассчитывается второе номинальное ускорение a1_d_2, которое необходимо до останова в пределах этого расстояния, начиная с текущей скорости v1 собственного транспортного средства 1. В этом расчете используются все задействованные в этом компоненты. Эти компоненты или, соответственно, отдельные участки пути следующие:
- имеющееся в настоящее время расстояние dx между собственным транспортным средством 1 и передним транспортным средством 2;
- расстояние s2_stop, которое проходит переднее транспортное средство 2 во время процесса торможения со своим имеющимся в настоящее время вторым ускорением a2 (торможением) со своей имеющейся в настоящее время второй скоростью v2 до останова;
- участок s1_react пути, который проходит собственное транспортное средство 1 за время t1 реакции,
- минимальное расстояние dx_min, которое должно оставаться между транспортными средствами 1 и 2, после того как оба пришли в состояние останова.
Имеющийся у собственного транспортного средства 1 максимальный тормозной путь s1_br рассчитывается в соответствии с
 Уравнение 10, где
Уравнение 10, где
 Уравнение 11
Уравнение 11
 Уравнение 12
Уравнение 12
Чтобы рассчитать необходимое второе номинальное ускорение a1_d_2 собственного транспортного средства 1, сначала определяется скорость v1_t1 собственного транспортного средства 1 по прошествии времени t1 реакции. Это осуществляется с тем учетом того, что собственное транспортное средство 1 в течение времени t1 реакции движется с постоянным ускорением a1:
 Уравнение 13
Уравнение 13
Из этого уравнения 13 получается, таким образом, скорость собственного транспортного средства 1 по прошествии времени t1 реакции. На основе v1_t1 и s1_br необходимое ускорение собственного транспортного средства 1 определяется как второе номинальное ускорение a1_d_2 с помощью следующего уравнения:
 Уравнение 14
Уравнение 14
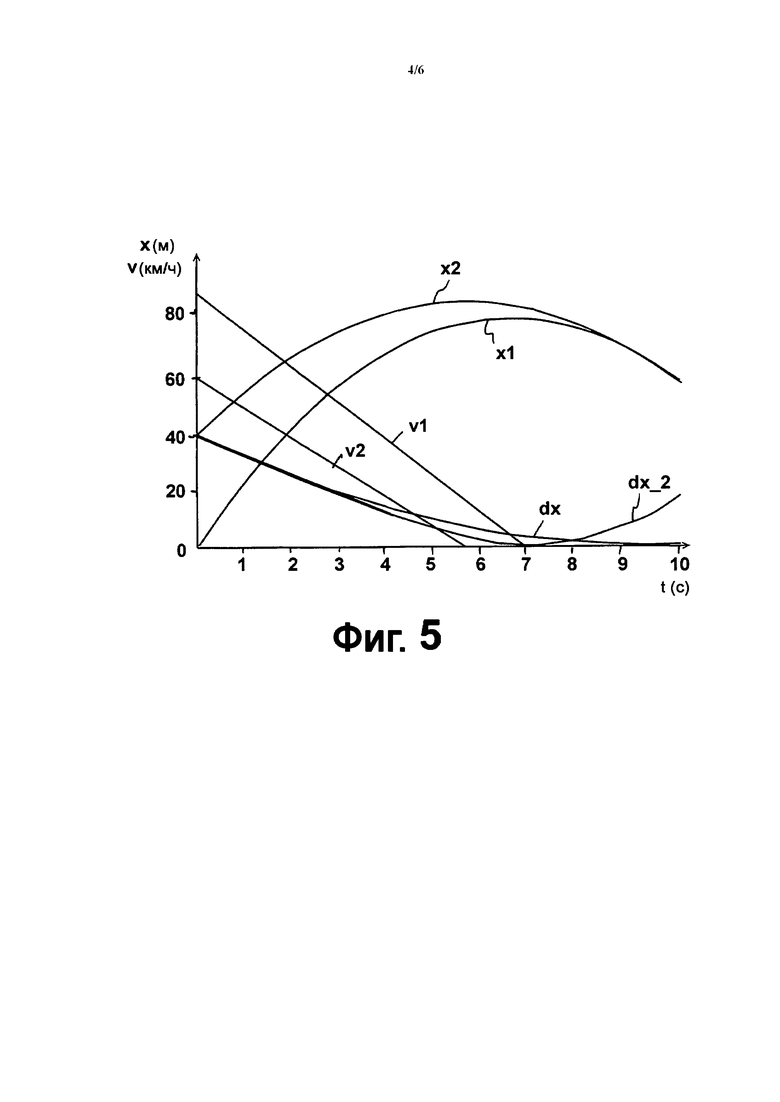
Определенное в уравнении 14 второе номинальное ускорение a1_d_2 представляет собой, таким образом, необходимое замедление второго способа BV2 оценки и используется в следующем примере. Ситуация движения в этом примере аналогична примеру 1 согласно фиг. 2, чтобы обеспечить возможность непосредственного сравнения этих двух подходов для расчета номинального ускорения или, соответственно, необходимого замедления. Переднее транспортное средство 2 ускоряется (тормозит) с a2=-3 м/с2 с начальной второй скорости, равной v2=60 км/ч. Собственное транспортное средство 1 имеет начальную скорость, равную v1=90 км/ч. Значение dx_min устанавливается равным 1 м, а начальное относительное расстояние dx_0 между двумя транспортными средствами 1 и 2 составляет dx_0=60 м. Время t1 реакции составляет 1 с. Во втором способе BV2 оценки в соответствии с уравнением 14 получается необходимое замедление (второе номинальное ускорение) a1_d_2, равное -3,9 м/с2. В отличие от этого в способе BV1 оценки уравнений движения в соответствии с уравнением 7 получается значение первого номинального ускорения a1_d_1, равное -4,3 м/с2, которое, как описано выше, должно рассматриваться как недопустимый результат, так как уравнение 7 отображает результат, момент времени которого находится после останова первого собственного транспортного средства 1 и второго переднего транспортного средства 2, в течение которого первое собственное транспортное средство 1 и второе переднее транспортное средство 2 движутся задним ходом. На фиг. 5 эти соотношения изображены уже известными из фиг. 2 кривыми или, соответственно, графиками и другими кривыми.
Второй способ BV2 оценки учитывает, таким образом, только конечные точки ситуации, когда первое собственное транспортное средство 1 и второе переднее транспортное средство 2 пришли в состояние останова; фазы торможения не рассматриваются отдельно для первого собственного транспортного средства 1 и переднего транспортного средства 2. Путь s2_stop торможения переднего транспортного средства 2 используется для расчета s1_br. Посредством явного расчета этого значения предотвращается нежелательное рассмотрение движения задним ходом переднего транспортного средства 2. Таким образом, при этом подходе рассматривается останов переднего, второго транспортного средства 2 после процесса торможения. Это изображается кривой x2 на фиг. 5. Она отображает этот останов или, соответственно, это неподвижное положение. На фиг. 5 при этом считается, что x2=const и v2=0, после того как переднее, второе транспортное средство 2 пришло в состояние останова. Этим методом можно рассчитывать правильное номинальное ускорение в таких ситуациях, в которых собственное транспортное средство 1 достигает останова, после того как переднее транспортное средство 2 остановилось.
Таким образом, на кривых согласно фиг. 5 показано, что уравнение 14 воспроизводит правильное значение номинального ускорения в этой ситуации, так как оно точно отображает то ускорение, которое необходимо, чтобы избежать столкновения с передним транспортным средством 2 и осуществить останов первого, собственного транспортного средства 1 при расстоянии, равном 1 м, позади переднего транспортного средства 2. Любое более сильное торможение также предотвращало бы столкновение с передним транспортным средством 2, однако останов был бы преждевременным, то есть при большем относительном расстоянии dx, чем намеченное значение, равное dx_min=1 м. Таким образом, в случае AEBS это привело бы к слишком раннему активированию тормозной системы.
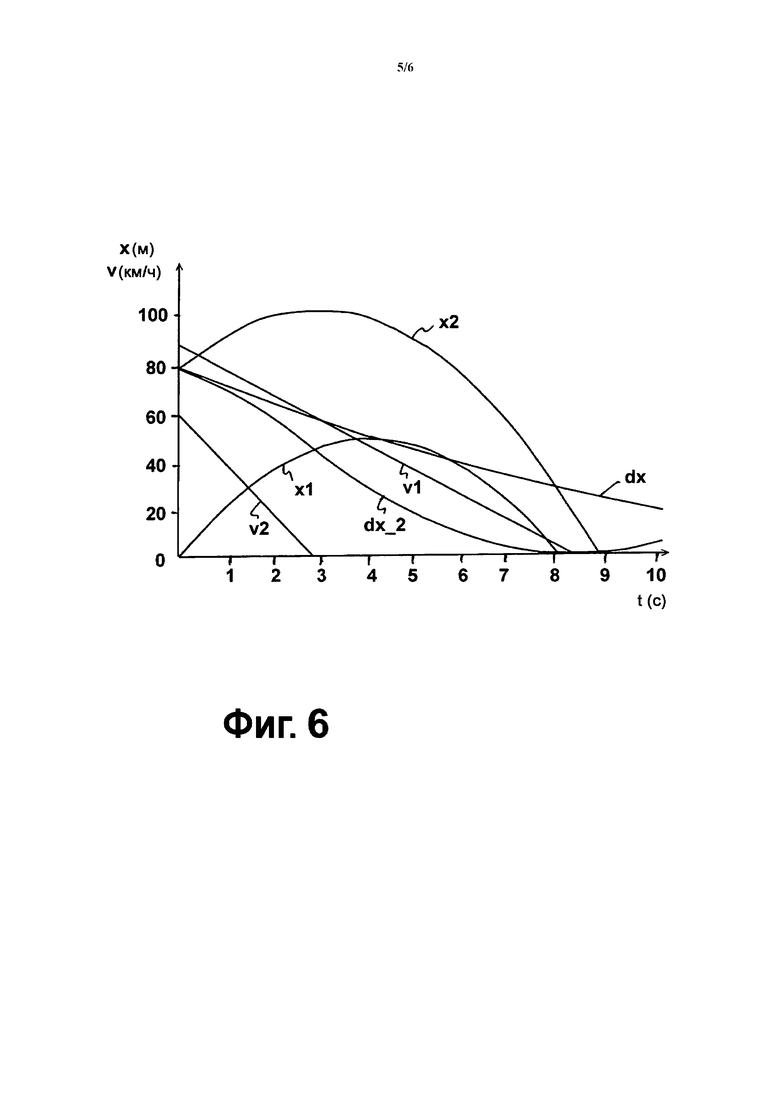
Во втором примере показанного выше способа BV1 оценки уравнений движения показана другая ситуация, в которой в случае способа BV1 оценки уравнений движения получается слишком высокое значение первого номинального ускорения a1_d_1. Эти ситуации в общем отличаются большим относительным расстоянием dx между первым собственным транспортным средством 1 и вторым, передним транспортным средством 2 и сильным замедлением a2 переднего транспортного средства 2. В описанном со ссылкой на фиг. 3 примере используется начальная вторая скорость v2=60 км/ч переднего транспортного средства 2, начальная скорость v1=90 км/ч собственного транспортного средства 1, минимальное расстояние dx_min=1 м, второе ускорение a2=-6 м/с2 переднего транспортного средства 2 и начальное относительное расстояние dx_0=90 м. В этом примере из уравнения 7 получилось бы первое номинальное ускорение a1_d_1, равное -7,3 м/с2. В отличие от этого из уравнения 14 в этой ситуации получается второе номинальное ускорение, равное a1_d_2=-3,6 м/с2. Результирующие движения, соответствующие этим двум значениям замедления, показаны на фиг. 6.
Переднее транспортное средство 2 достигает останова при t=2,8 с. Значение a1_d_1 в соответствии с описанным выше способом BV1 оценки уравнений движения слишком велико и приводит к расстоянию при останове, равному 45,1 м, как изложено выше. С другой стороны, в случае второго способа BV2 оценки получается значение второго номинального ускорения a1_d_2, равное -3,6 м/с2, соответствующее минимальному замедлению, которое необходимо, чтобы избежать столкновения с передним транспортным средством 2 в этой ситуации. На фиг. 6 показано, что собственное транспортное средство 1 достигает останова при t=8 с и при относительном расстоянии, равном 1 м.
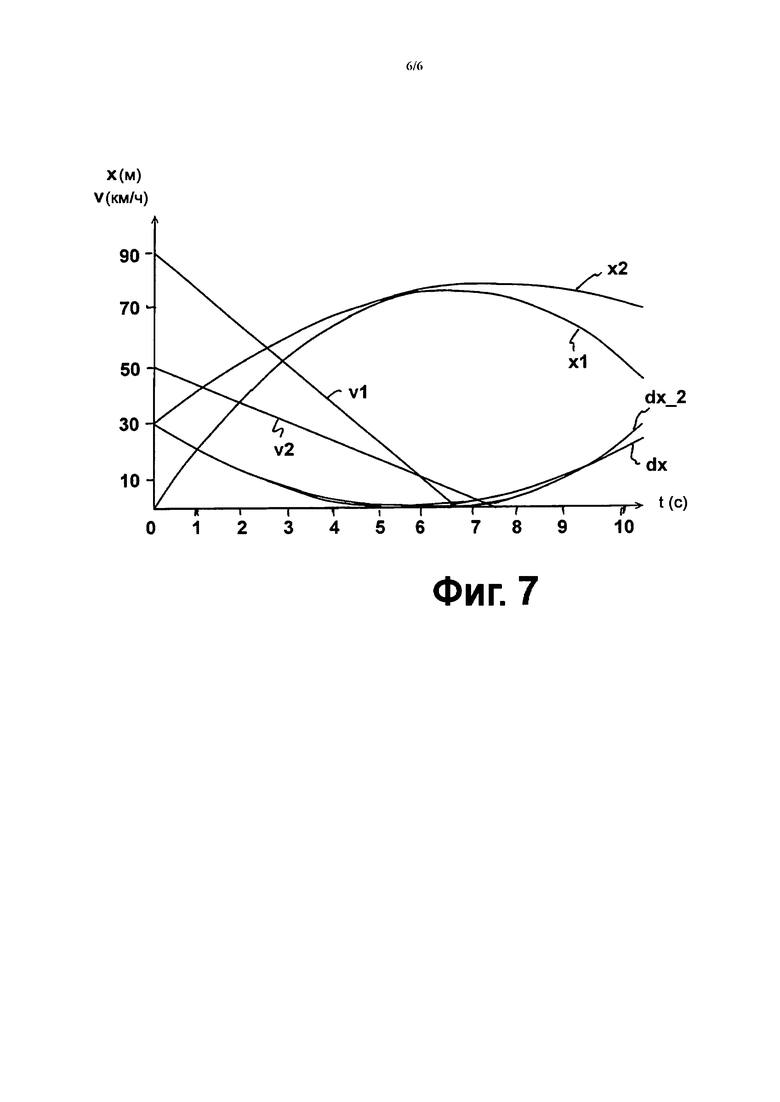
В отличие от этого в показанном выше в связи со способом BV1 оценки уравнений движения примере 3 в случае использования способа BV1 оценки уравнений движения получается правильный результат первого номинального ускорения a1_d_1. При этом переднее транспортное средство 2 замедлялось с a2=-2 м/с2 при начальной скорости, равной 50 км/ч. Собственное транспортное средство 1 имеет начальную скорость, равную 90 км/ч. Значение dx_min устанавливается равным 1 м, а начальное относительное расстояние dx_0 между первым собственным транспортным средством 1 и вторым передним транспортным средством 2 составляет 40 м. В этом примере из уравнения 7 получается первое номинальное ускорение a1_d_1=-5,2 м/с2. Из уравнения 14, в отличие от этого, для этой ситуации получается результат a1_d_2=-5,02 м/с2. Результирующие движения для обоих значений ускорений изображены на фиг. 7.
На фиг. 7 показано, что замедление со вторым номинальным ускорением a1_d_2, определенным вторым способом BV2 оценки, приводит к останову собственного транспортного средства 1 при t=6 с. Пройденный путь собственного транспортного средства 1, который показан как x1, на 1 м меньше, чем положение x2 переднего транспортного средства 2, когда переднее транспортное средство 2 останавливается через t=7 с. Но прежде чем собственное транспортное средство 1 со вторым номинальным ускорением a1_d_2 достигнет останова, определенное вторым способом BV2 оценки, относительное расстояние dx_2 между собственным, первым транспортным средством 1 и передним, вторым транспортным средством 2 будет меньше 0. Это означает, что собственное транспортное средство 1 столкнется с передним транспортным средством 2, прежде чем собственное транспортное средство 1 и переднее транспортное средство 2 достигнут останова. Таким образом, значение второго способа BV2 оценки для второго номинального ускорения a1_d_2 в этом примере неправильно или, соответственно, не приводит к правильному расчету значения замедления, чтобы избежать столкновения с передним транспортным средством 2. Значит, в случае такого рода следует использовать способ BV1 оценки уравнений движения, то есть a1_d_1 согласно уравнению 7.
Во втором способе BV2 оценки рассматриваются, таким образом, только конечные точки ситуации торможения, когда оба транспортных средства 1, 2 пришли в состояние останова. Однако в нем не проверяются, возможно, возникающие во время процесса торможения точки пересечения траекторий движения двух транспортных средств 1, 2, то есть столкновения, происходящие в это время.
Таким образом, в соответствии с изобретением оба способа BV1, BV2 оценки используются для правильного расчета критерия торможения.
Для особого случая, когда переднее транспортное средство 2 остановилось, а собственное транспортное средство 1 приближается, оба способа BV1, BV2 оценки приводят к одинаковому результату, так как
Таким образом, с учетом приведенных выше выкладок в нижеследующем описании различаются разные случаи применения способов BV1, BV2 оценки, которые по существу зависят от ускорения a2 переднего транспортного средства 2 и относительной скорости между транспортными средствами 1 и 2 по истечении времени dv_t1 реакции.
Для проверки необходимости автоматического включения тормоза во избежание столкновения проверяются следующие случаи.
В первом критерии K1 проверяется, меньше ли расстояние dx_t1 между транспортными средствами 1 и 2 по прошествии времени t1 реакции, чем минимальное расстояние dx_min: dx_t1<dx_min.
Если первый критерий K1 выполнен, возникает необходимость автоматического торможения, так как водитель не в состоянии самостоятельно начать замедление.
В случае если первый критерий K1 не подходит, в следующем критерии K2 различаются и проверяются четыре случая: K2a, K2b, K2c, K2d. Чтобы различать эти случаи, используются соответственно ускорения a2 переднего транспортного средства 2 и относительная скорость по истечении времени dv_t1 реакции.
Второй критерий K2a проверяется, в случае если a2<0 и dv_t1<0. В этом случае сначала проверяется способ BV1 оценки уравнений движения. В случае если он не подходит, применяется второй способ BV2 оценки.
В случае если второй критерий K2a выполнен, то есть определенное номинальное ускорение a_1_d1 или, соответственно, a_1_d2 превышает некоторое предельное значение, возникает необходимость автоматического торможения собственного транспортного средства 1, так как водитель по истечении его времени реакции будет не в состоянии самостоятельно установить необходимую величину замедления.
Третий критерий K2b проверяется, в случае если a2<0 и dv_t1≥0. В данном случае проверка осуществляется всегда только с помощью второго способа BV2 оценки. Тем самым избегают недостатков способа BV1 оценки уравнений движения в тех ситуациях, в которых происходит сильное замедление переднего транспортного средства 2. В случае если третий критерий K2b выполнен, то есть определенное второе номинальное ускорение a_1_d2 превышает некоторое предельное значение, возникает необходимость автоматического торможения собственного транспортного средства 1, так как водитель по истечении его времени реакции будет не в состоянии самостоятельно установить необходимую величину замедления.
Четвертый критерий K2c проверяется, в случае если a2≥0 и dv_t1<0. В данном случае проверка осуществляется всегда только с помощью способа BV1 оценки уравнений движения, так как только способ BV1 оценки уравнений движения является релевантным. Второй способ BV2 оценки в данном случае неприменим, так как при положительном ускорении a2 переднего транспортного средства 2 определение пути s2_stop торможения невозможно. Недостатки способа BV1 оценки уравнений движения в ситуациях, для которых характерно сильное замедление переднего транспортного средства 2, в ситуациях такого рода не являются релевантными, так как рассматриваются только положительные значения a2. В случае если четвертый критерий K2c выполнен, то есть определенное первое номинальное ускорение a_1_d1 превышает предельное значение, возникает необходимость автоматического торможения собственного транспортного средства 1, так как водитель по истечении его времени реакции будет не в состоянии самостоятельно установить необходимую величину замедления.
Пятый критерий K2d проверяется, в случае если a2≥0 и dv_t1≥0. В данном случае переднее транспортное средство 2 ускоренно движется, чтобы уехать от собственного транспортного средства 1. Этот случай, таким образом, в целом не опасен, так что нет необходимости начинать автоматическое аварийное торможение.
При этом указание на «первый, … пятый критерий» не выражает последовательности или значимости.
Таким образом, в соответствии с критериями K1, K2a-K2d может быть получен алгоритм регулирования, в соответствии с которым сначала проверяется первый критерий K1, а затем различаются случаи по критериям K2a, K2b, K2c и K2d, в которых, как описано, номинальное ускорение (необходимое замедление) определяется либо из уравнения 7 как a_1_d1, либо из уравнения 14 как a_1_d2.
Список ссылочных позиций
1 Собственное транспортное средство
2 Передний объект/транспортное средство
3 Проезжая часть
4 Датчик расстояния
5 Система динамики движения
6 Устройство управления
7 Датчик скорости
8 Тормоза транспортного средства
9 Предупредительная индикация
S1 Вершина x1
S2 Вершина x2
x1 Положение первого транспортного средства
x2 Положение второго транспортного средства
x1_0 Положение первого транспортного средства в момент времени t=0
x2_0 Положение второго транспортного средства в момент времени t=0
v1 Скорость первого транспортного средства
v1_t1 Скорость первого транспортного средства по прошествии времени t1 реакции
v2 Скорость второго транспортного средства
a1 Продольное ускорение первого транспортного средства
a2 Продольное ускорение второго транспортного средства
a_1_d1 Первое номинальное ускорение
a_1_d2 Второе номинальное ускорение
dx Относительное расстояние
dx_min Минимальное расстояние
dx_0 Начальное относительное расстояние в момент времени t=0
dx_t1 Относительное расстояние по прошествии времени t1 реакции
dx_2 Относительное расстояние в соответствии с BV2
s1_br Имеющийся тормозной путь первого транспортного средства
s1_react Путь первого транспортного средства, пройденный за t1
s2_stop Путь торможения второго транспортного средства до останова
dv Относительная скорость
dv_t1 Относительная скорость по прошествии времени t1 реакции
M1 Сигнал измерения относительного расстояния
M2 Сигнал измерения скорости
M3 Сигналы управления торможением
Si1 Предупредительный сигнал индикации
t Время
t1 Время реакции
t1_dv Собственное время торможения первого транспортного средства (dv=0; dx=dx_min)
t2_stop Время торможения второго транспортного средства/объекта до v2=0
BV1 Способ 1 оценки
BV2 Способ 2 оценки
BV0 Предшествующий вспомогательный способ оценки
K1 Первый критерий
K2 Другой критерий
K2a Второй критерий
K2b Третий критерий
K2c Четвертый критерий
K2d Пятый критерий
Zk1 Критерий допустимости.
Изобретение относится к способу определения ситуации аварийного торможения транспортного средства. При осуществлении способа определяют собственную скорость (v1) движения транспортного средства (1), собственное продольное ускорение (a1), свое относительное расстояние (dx) до переднего объекта (2), и вторую скорость (v2), и второе ускорение (a2) переднего объекта (2). По параметрам (v1, a1, dx, v2, a2) состояния посредством одного из способов оценки определяют, имеет ли место ситуация аварийного торможения. В зависимости от параметров (v1, a1, dx, v2, a2) состояния для оценки, имеет ли место ситуация аварийного торможения, используют два разных способа (BV1, BV2) оценки. В зависимости от параметров (v1, a1, dx, v2, a2) состояния определяют, какой из указанных разных способов (BV1, BV2) оценки будет использоваться. Предложены также устройство управления для системы регулирования динамики движения собственного транспортного средства и система регулирования динамики движения транспортного средства. Достигается надежное распознавание ситуации аварийного торможения и снижение вероятности неоправданного аварийного торможения. 3 н. и 13 з.п. ф-лы, 7 ил. 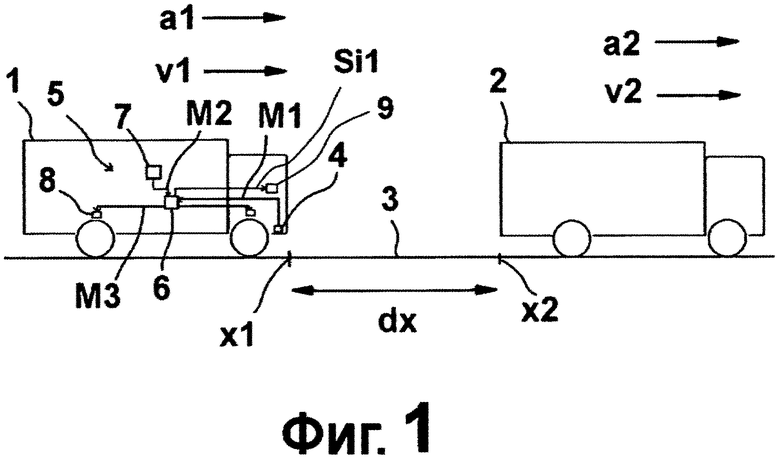
1. Способ определения ситуации аварийного торможения первого, собственного транспортного средства (1), в котором собственное транспортное средство (1) определяет по меньшей мере следующие параметры состояния:
свою собственную скорость (v1) движения,
свое собственное продольное ускорение (a1),
свое относительное расстояние (dx) до переднего объекта (2), и
вторую скорость (v2) и второе ускорение (a2) переднего объекта (2),
при этом по параметрам (v1, a1, dx, v2, a2) состояния посредством одного из способов (BV1, BV2) оценки определяют, имеет ли место ситуация аварийного торможения,
отличающийся тем, что
в зависимости от параметров (v1, a1, dx, v2, a2) состояния для оценки, имеет ли место ситуация аварийного торможения, используют по меньшей мере два разных способа (BV1, BV2) оценки,
причем в зависимости от параметров (v1, a1, dx, v2, a2) состояния определяют, какой из указанных по меньшей мере двух разных способов (BV1, BV2) оценки будет использоваться.
2. Способ определения ситуации аварийного торможения первого, собственного транспортного средства (1) по п. 1, отличающийся тем, что разные способы (BV1, BV2) оценки включают в себя по меньшей мере следующие способы оценки:
способ (BV1) оценки уравнений движения, в котором определяют
систему уравнений движения собственного транспортного средства (1) и переднего объекта (2), и
способ (BV2) оценки тормозного пути, в котором определяют тормозной путь (s1_br) собственного транспортного средства (1).
3. Способ по любому из пп. 1 или 2, отличающийся тем, что на основании первого критерия (Zk1) допустимости определяют, допустим ли и будет ли применяться первый способ (BV1) оценки или по меньшей мере второй способ (BV2) оценки.
4. Способ по п. 3, отличающийся тем, что в случае, если собственное время (t1_dv) торможения, которое требуется собственному транспортному средству (1) до достижения минимального расстояния (dx_min) и одинаковой скорости (dv=0) с передним объектом (2), меньше или равно времени (t2_stop) торможения объекта, которое требуется переднему объекту (2) для торможения до останова (v2(t2_stop)=0), является допустимым и применяется первый способ (BV1) оценки, а в том случае, если собственное время (t1_dv) торможения больше времени (t2_stop) торможения объекта, является допустимым и применяется второй способ (BV2) оценки.
5. Способ по п. 1, отличающийся тем, что в случае определения ситуации аварийного торможения автоматически начинают процесс аварийного торможения и/или подают предупредительный сигнал (Si1) индикации.
6. Способ по п. 5, отличающийся тем, что при определении, какой из способов (BV1, BV2) оценки следует использовать, и/или при отдельных способах оценки дополнительно учитывают время (t1) реакции внутренней тормозной системы транспортного средства после начала автоматического аварийного торможения и/или время (t1) реакции водителя после подачи предупредительного сигнала (Si1) индикации посредством предупредительной индикации (9).
7. Способ по п. 6, отличающийся тем, что на первом этапе предварительно применяют предшествующий вспомогательный способ (BV0) оценки, в котором оценивают, выполнен ли первый критерий (K1), в соответствии с которым текущее относительное расстояние (dx) собственного транспортного средства (1) до переднего объекта (2) по прошествии времени (t1) реакции меньше, чем минимальное расстояние (dx_min), которое должно поддерживаться,
причем при выполнении первого критерия (K1) распознают ситуацию аварийного торможения, а при невыполнении первого критерия (K1) в дальнейшем определяют, какой из других способов (BV1, BV2) оценки необходимо использовать.
8. Способ по п. 7, отличающийся тем, что при невыполнении первого критерия (K1) оценку в дальнейшем выполняют на основании второго ускорения (a2) переднего объекта (2) и относительной скорости по прошествии времени (dv_t1) реакции переднего объекта (2) относительно собственного транспортного средства (1), причем относительную скорость (dv) по прошествии времени (dv_t1) реакции образуют как разность второй скорости (v2) и собственной скорости (v1).
9. Способ по п. 7 или 8, отличающийся тем, что при невыполнении первого критерия (K1) надлежащий способ (BV1, BV2) оценки определяют в зависимости от других критериев (K2a, K2b, K2c, K2d), причем другие критерии (K2a, K2b, K2c, K2d) включают в себя один или несколько следующих критериев:
- второй критерий (K2a), который выполнен, если ускорение (a2) переднего объекта отрицательно и относительная скорость по прошествии времени (dv_t1) реакции отрицательна,
причем при выполнении второго критерия (K2a) проверяют критерий (Zk1) допустимости первого способа (BV1) оценки, а при выполнении критерия (Zk1) допустимости выполняют первый способ (BV1) оценки, а при невыполнении второго критерия (Zk1) используют второй способ (BV2) оценки,
- третий критерий (K2b), который выполнен, если второе ускорение (a2) отрицательно, и относительная скорость по прошествии времени (dv_t1) реакции больше или равна нулю,
причем при выполнении третьего критерия (K2b) используют второй способ (BV2) оценки,
- четвертый критерий (K2c), который выполнен, если второе ускорение (a2) больше или равно нулю, и относительная скорость по прошествии времени (dv_t1) реакции отрицательна, и при выполнении четвертого критерия (K2c) используют первый способ (BV1) оценки,
- пятый критерий (K2d), который выполнен, если второе ускорение (a2) больше или равно нулю, и относительная скорость по прошествии времени (dv_t1) реакции больше или равна нулю,
и при выполнении пятого критерия (K2d) не выполняют определение ситуации аварийного торможения.
10. Способ по п. 1, отличающийся тем, что с помощью способов (BV1, BV2) оценки соответственно определяют номинальное ускорение (a1_d_1, a1_d_2).
11. Способ по п. 1, отличающийся тем, что в первом способе
(BV1) оценки составляют уравнения движения собственного транспортного средства (1) и переднего объекта (2) второго порядка по времени и содержат:
текущее относительное расстояние (dx), текущие значения (a1, a2) ускорения собственного транспортного средства (1) и переднего объекта (2) и текущие скорости (v1, v2) собственного транспортного средства (1) и переднего объекта (2),
и определяют, получается ли из этих уравнений движения сокращение ниже минимального (dx_min) расстояния между собственным транспортным средством (1) и передним объектом (2).
12. Способ по п. 11, отличающийся тем, что в первом способе (BV1) оценки определяют первое номинальное ускорение a1_d_1 с применением уравнения
 (Уравнение 7),
(Уравнение 7),
при этом a2 представляет собой второе ускорение, dv_t1 - оценочную относительную скорость по прошествии времени (t1) реакции, dx_t1 - оценочное относительное расстояние по прошествии времени (t1) реакции, а dx_min - минимальное расстояние.
13. Способ по п. 10, отличающийся тем, что во втором способе (BV2) оценки определяют второе номинальное ускорение (a1_d_2) из расчета, какой тормозной путь (s1_br) для собственного транспортного средства (1) остается при начале торможения по прошествии времени (t1) реакции на основании текущих значений собственной скорости (v1), второй скорости (v2) и второго ускорения (a2), текущего относительного расстояния (dx) и фиксированного минимального расстояния (dx_min).
14. Способ по п. 13, отличающийся тем, что второе номинальное ускорение (a1_d_2) определяют на основе уравнения
 (Уравнение 14),
(Уравнение 14),
где v1_t1 представляет собой определенную по текущей собственной скорости (v1) и текущему собственному ускорению (a1) собственную скорость (v1) собственного транспортного средства (1) по прошествии времени (t1) реакции и (s1_br) имеющийся тормозной путь собственного транспортного средства (1) при начале торможения по прошествии времени (t1) реакции.
15. Устройство (6) управления для системы (5) регулирования динамики движения собственного транспортного средства (1) для выполнения способа по одному из предыдущих пунктов,
при этом устройство (6) управления для определения параметров (v1, a1, dx, v2, a2) состояния включает в себя:
сигнал (M1) измерения относительного расстояния датчика (4) расстояния для определения относительного расстояния (dx) до едущего впереди объекта (2),
cигнал (M2) измерения скорости датчика (7) скорости для определения собственной скорости (v1) собственного транспортного средства (1),
при этом устройство (6) управления, кроме того, в качестве параметров состояния определяет или измеряет собственное ускорение (a1) собственного транспортного средства (1), вторую скорость (v2) переднего объекта (2) и второе ускорение (a2) переднего объекта (2) и содержит сохраненные во внутренней или внешней памяти данные о времени (t1) реакции и минимальном расстоянии (dx_min), которое должно соблюдаться для этого относительного расстояния,
при этом устройство (6) управления по параметрам (v1, a1, dx, v2, a2) состояния посредством способа (BV1, BV2) оценки определяет, имеет ли место ситуация аварийного торможения,
при этом устройство (6) управления в зависимости от параметров (v1, a1, dx, v2, a2) состояния для оценки, имеет ли место ситуация аварийного торможения, использует разные способы (BV1, BV2) оценки,
при этом устройство (6) управления в зависимости от параметров (v1, a1, dx, v2, a2) состояния определяет, какой из нескольких способов (BV1, BV2) оценки следует использовать,
при этом разные способы (BV1, BV2) оценки включают в себя по меньшей мере следующие способы оценки:
способ (BV1) оценки уравнений движения для определения системы уравнений движения собственного транспортного средства (1) и переднего объекта (2), и
способ (BV2) оценки тормозного пути для определения имеющегося тормозного пути (s1_br) собственного транспортного средства (1),
при этом устройство (6) управления в зависимости от определения подает сигналы (M3) управления торможением тормозам (8) транспортного средства и/или предупредительный сигнал (Si1) индикации водителю.
16. Система (5) регулирования динамики движения, в частности система регулирования тормозов или система движения в колонне, в частности, для выполнения способа по одному из пп. 1-14,
причем система (5) регулирования динамики движения содержит устройство (6) управления по п. 15, датчик (4) расстояния, датчик (7) скорости и тормоза (8) транспортного средства.
| Способ лечения тяжелых форм ишемической болезни сердца | 1989 |
|
SU1803109A1 |
| WO 2009072965 A1, 11.06.2009 | |||
| US 2008275618 A1, 06.11.2008 | |||
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ОБЪЕКТОМ, ПЕРЕМЕЩАЮЩИМСЯ В ПЕРЕДНЕБОКОВОЙ ЗОНЕ ТРАНСПОРТНОГО СРЕДСТВА В НАПРАВЛЕНИИ, ПЕРЕСЕКАЮЩЕМ ТРАЕКТОРИЮ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2402445C1 |

