Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способам управления транспортным средством и к устройствам управления транспортным средством для оценки расстояний между транспортными средствами.
Уровень техники
[0002] Патентный документ 1 раскрывает устройство отслеживания целей, которое, когда отслеживаемая цель скрывается посредством нескольких блокирующего объектов, вычисляет оцененное время скрытия на основе разности между векторами перемещения каждого из блокирующих объектов и отслеживаемой цели.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2012-80221
Сущность изобретения
Задачи, решаемые изобретением
[0004] К сожалению, поскольку технология, описанная в патентном документе 1, вычисляет оцененное время скрытия с использованием скорости в то время, когда отслеживаемая цель скрывается, временной интервал, в который отслеживаемая цель должна приближаться вплотную, не может оцениваться точно, когда скорость отслеживаемой цели может изменяться в скрытой области. По этой причине, в случае если технология, описанная в патентном документе 1, используется для управления транспортным средством, имеется вероятность того, что управление транспортным средством согласно изменению скорости отслеживаемой цели не может достигаться.
[0005] В свете вышеуказанной проблемы, цель настоящего изобретения заключается в том, чтобы предоставлять способ управления транспортным средством и устройство управления транспортным средством, способные обеспечить управление транспортным средством согласно изменению скорости отслеживаемой цели.
Средство для решения задач
[0006] Способ управления транспортным средством согласно аспекту настоящего изобретения включает в себя: обнаружение блокирующего объекта, который находится в позиции, в которой блокирующий объект перегораживает движение отслеживаемого транспортного средства в полосе движения, в которой движется отслеживаемое транспортное средство, и который скрывает, по меньшей мере, часть полосы движения от датчика, и встречного транспортного средства, движущегося в направлении к отслеживаемому транспортному средству по встречной полосе движения, противоположной относительно полосы движения; и замедление транспортного средства, когда встречное транспортное средство замедляется.
Преимущества изобретения
[0007] Аспект настоящего изобретения предоставляет способ управления транспортным средством и устройство управления транспортным средством, способные обеспечить управление транспортным средством согласно изменению скорости отслеживаемой цели.
Краткое описание чертежей
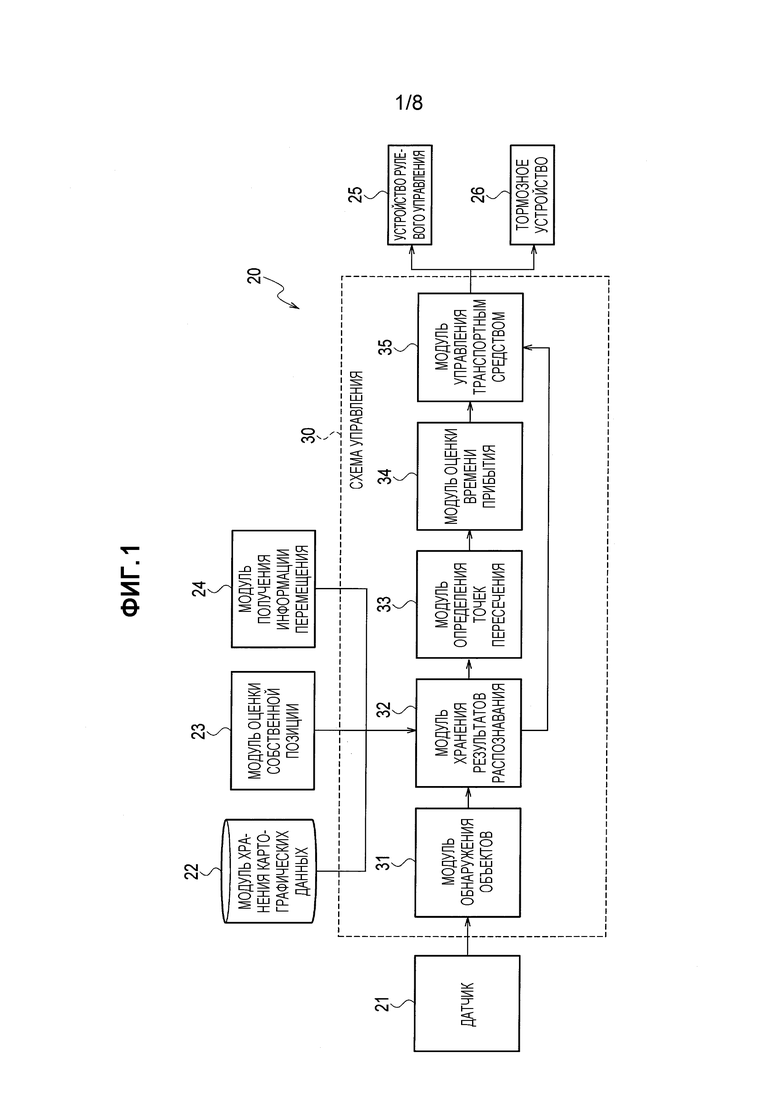
[0008] Фиг. 1 является принципиальной блок-схемой для пояснения базовой структуры устройства управления транспортным средством согласно варианту осуществления настоящего изобретения.
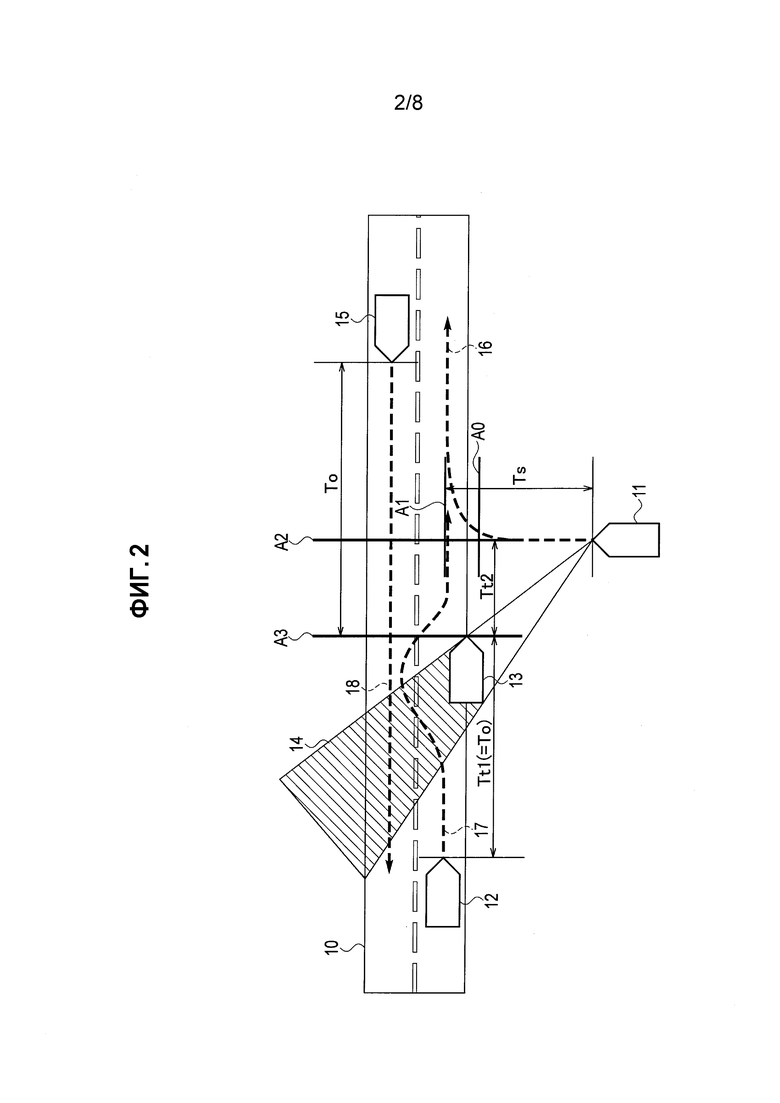
Фиг. 2 является схемой для пояснения окружения, в котором транспортное средство, имеющее устройство управления транспортным средством согласно варианту осуществления настоящего изобретения, въезжает в поток в ближайшей полосе движения.
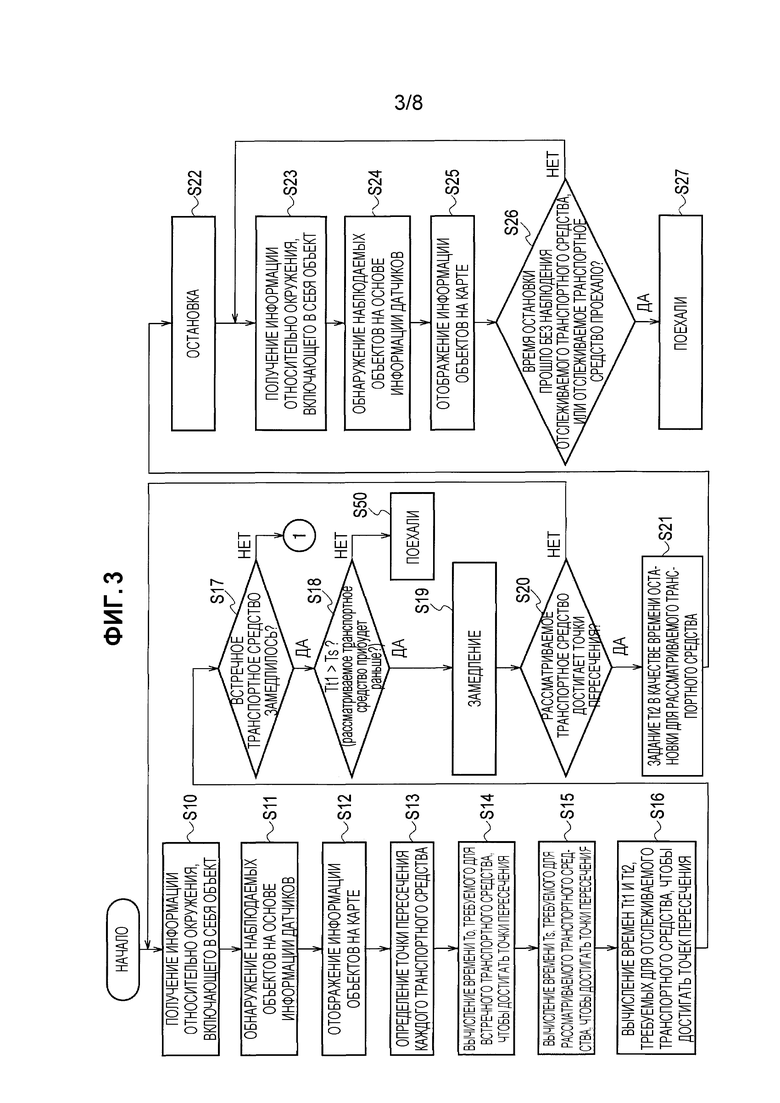
Фиг. 3 является блок-схемой последовательности операций для пояснения примера способа управления транспортным средством посредством устройства управления транспортным средством согласно варианту осуществления настоящего изобретения.
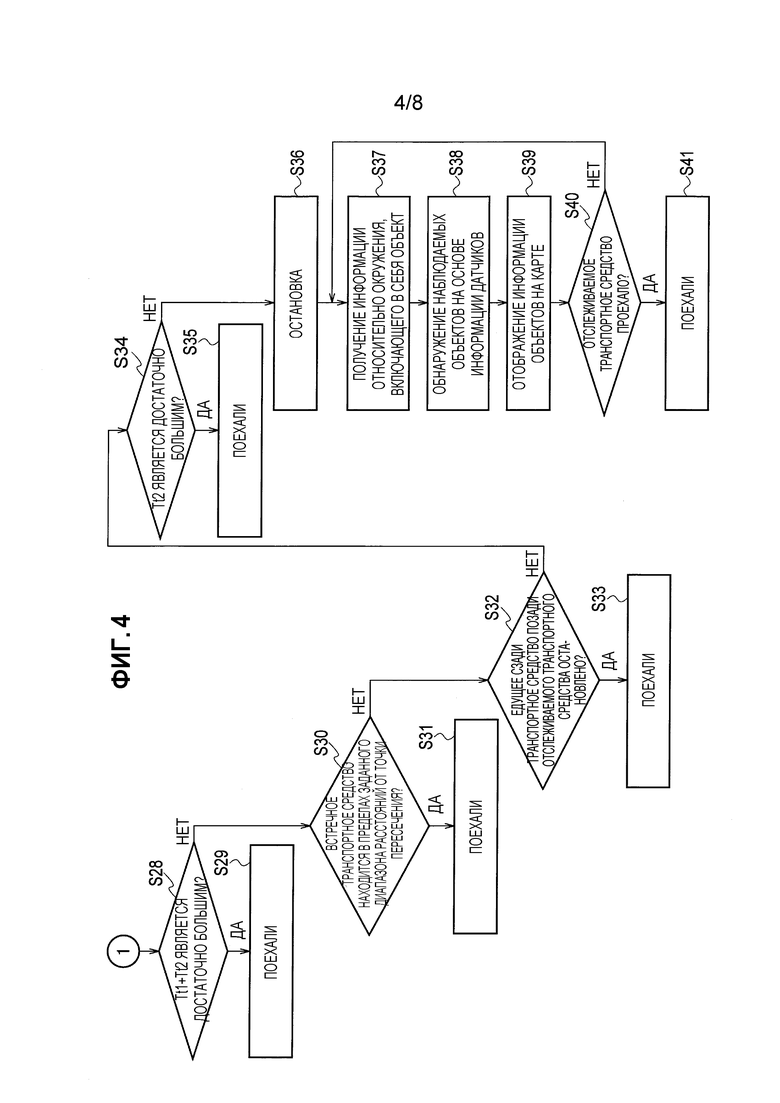
Фиг. 4 является блок-схемой последовательности операций для пояснения примера способа управления транспортным средством посредством устройства управления транспортным средством согласно варианту осуществления настоящего изобретения.
Фиг. 5 является схемой для пояснения окружения, в котором встречное транспортное средство замедляется или останавливается.
Фиг. 6 является схемой для пояснения окружения, в котором отслеживаемое транспортное средство замедляется или останавливается.
Фиг. 7 является схемой для пояснения окружения, в котором как отслеживаемое транспортное средство, так и встречное транспортное средство движутся без замедления.
Фиг. 8 является схемой для пояснения окружения, в котором едущее сзади транспортное средство позади отслеживаемого транспортного средства замедляется или останавливается.
Подробное описание вариантов осуществления
[0009] Со ссылкой на чертежи, в дальнейшем описывается вариант осуществления настоящего изобретения. На иллюстрации чертежей, идентичные или аналогичные части обозначаются посредством идентичных или аналогичных ссылок с номерами, и описание этих частей опускается.
[0010] Устройство управления транспортным средством
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 20 управления транспортным средством согласно этому варианту осуществления. Устройство 20 управления транспортным средством включает в себя датчик 21, модуль 22 хранения картографических данных, модуль 23 оценки собственной позиции, модуль 24 получения информации перемещения, устройство 25 рулевого управления, тормозное устройство 26 и схему 30 управления. Устройство 20 управления транспортным средством, например, монтируется на транспортном средстве 11 (рассматриваемом транспортном средстве) и управляет транспортным средством 11 согласно оцененному поведению отслеживаемого транспортного средства 12, как проиллюстрировано на фиг. 2.
[0011] Датчик 21, смонтированный на транспортном средстве 11, обнаруживает информацию позиции относительно объектов около транспортного средства 11 и выводит информацию позиции в схему 30 управления. Для датчика 21, например, может использоваться датчик измерения расстояния или датчик изображений, такой как лазерный дальномер (LRF), радар миллиметрового диапазона, ультразвуковой датчик и стереокамера. Датчик 21 может включать в себя несколько видов датчиков, и датчик 21 может обнаруживать скорости, ускорения, формы, цвета и т.п. окружающих объектов. Датчик 21 получает трехмерные данные расстояния окружения, например, посредством сканирования заданного диапазона около транспортного средства 11. Трехмерные данные расстояния являются данными точечных групп, указывающими относительные трехмерные позиции из датчика 21.
[0012] Модуль 22 хранения картографических данных представляет собой устройство хранения данных для сохранения картографических данных высокой четкости. Модуль 22 хранения картографических данных может монтироваться на транспортном средстве 11 или может предоставляться на сервере и т.п. через линию связи. Картографические данные могут включать в себя не только общую картографическую информацию, такую как дороги, перекрестки, мосты, туннели и т.п., но также и информацию относительно дорожных сооружений, такую как позиции и классификации зон движения полос движения, и информацию по позициям, формам и т.п. планиметрических признаков около дорог.
[0013] Модуль 23 оценки собственной позиции оценивает собственную позицию транспортного средства 11 в картографических данных, сохраненных в модуле 22 хранения картографических данных. Собственная позиция включает в себя ориентацию транспортного средства 11. Модуль 23 оценки собственной позиции оценивает собственную позицию на основе информации, полученной из устройства позиционирования, такого как приемное устройство на основе глобальной системы позиционирования (GPS), и датчика ускорения, датчика угловой скорости, датчика угла поворота при рулении и датчика скорости, смонтированных на транспортном средстве 11. Модуль 23 оценки собственной позиции может оценивать более точную собственную позицию в картографических данных посредством вычисления относительной позиции транспортного средства 11 относительно планиметрических признаков, сохраненных в картографических данных, из информации, полученной из датчика 21.
[0014] Модуль 24 получения информации перемещения получает информацию перемещения, указывающую состояние движения транспортного средства 11, такую как скорость, ускорение, угловая скорость и угол поворота при рулении. Информация перемещения получается из датчика скорости, датчика ускорения, датчика угловой скорости, датчика угла поворота при рулении и т.п., смонтированных на транспортном средстве 11.
[0015] Устройство 25 рулевого управления включает в себя исполнительное устройство, которое рулит транспортным средством 11 под управлением схемы 30 управления. Тормозное устройство 26 включает в себя исполнительное устройство, которое выполняет операцию торможения транспортного средства 11 под управлением схемы 30 управления.
[0016] Схема 30 управления включает в себя модуль 31 обнаружения объектов, модуль 32 хранения результатов распознавания, модуль 33 определения точек пересечения, модуль 34 оценки времени прибытия и модуль 35 управления транспортным средством. Схема 30 управления включает в себя программируемое обрабатывающее устройство, такое как обрабатывающее устройство, включающее в себя электрическую схему. Помимо этого, схема обработки может включать в себя устройства, такие как специализированная интегральная схема (ASIC), выполненная с возможностью выполнять заданные функции, и схемные части. Схема 30 управления может включать в себя одну или более схем обработки. Схема 30 управления также может служить в качестве электронного модуля управления (ECU), используемого для другого управления, связанного с транспортным средством 11.
[0017] Модуль 31 обнаружения объектов обнаруживает наблюдаемые объекты около транспортного средства 11 на основе информации, полученной посредством датчика 21. Наблюдаемые объекты представляют собой объекты, которые не скрываются от датчика 21 посредством помех и могут наблюдаться посредством датчика 21. Модуль 31 обнаружения объектов получает информацию атрибутов относительно наблюдаемых объектов на основе информации, полученной посредством датчика 21, картографических данных, сохраненных в модуле 22 хранения картографических данных, собственной позиции, оцененной посредством модуля 23 оценки собственной позиции, и информации перемещения, полученной посредством модуля 24 получения информации перемещения. Информация атрибутов может включать в себя позиции, скорости, ускорения, угловые скорости, ориентации, формы, цвета и виды наблюдаемых объектов. Модуль 31 обнаружения объектов задает идентификаторы для обнаруженных наблюдаемых объектов и определяет информацию атрибутов и идентификаторы относительно наблюдаемых объектов в качестве информации объектов относительно наблюдаемых объектов. Другими словами, информация объектов включает в себя информацию перемещения, такую как скорость, ускорение и угловая скорость.
[0018] На основе собственной позиции, оцененной посредством модуля 23 оценки собственной позиции, и информации перемещения, полученной посредством модуля 24 получения информации перемещения, модуль 32 хранения результатов распознавания ассоциирует информацию объектов, полученную из модуля 31 обнаружения объектов, с картографическими данными, сохраненными в модуле 22 хранения картографических данных, и сохраняет их в качестве результата распознавания. Модуль 32 хранения результатов распознавания отображает информацию объектов, определенную посредством модуля 31 обнаружения объектов, в картографических данных. Модуль 32 хранения результатов распознавания сохраняет идентификаторы для сохраненной информации объектов и в силу этого может отслеживать наблюдаемые объекты.
[0019] В примере, проиллюстрированном на фиг. 2, модуль 32 хранения результатов распознавания сохраняет информацию объектов относительно каждого из отслеживаемого транспортного средства 12, блокирующего объекта 13 и встречного транспортного средства 15, которые представляют собой наблюдаемые объекты. Отслеживаемое транспортное средство 12 движется в ближайшей полосе движения на дороге 10, ортогональной к транспортному средству 11. Блокирующий объект 13 расположен в позиции, в которой блокирующий объект 13 перегораживает движение отслеживаемого транспортного средства 12 в полосе движения, в которой движется отслеживаемое транспортное средство 12, и скрывает полосу движения от датчика 21. Блокирующий объект 13, например, представляет собой припаркованное транспортное средство. Встречное транспортное средство 15 движется по встречной полосе движения, противоположной относительно полосы движения, в которой движется отслеживаемое транспортное средство 12, в направлении к отслеживаемому транспортному средству 12. Модуль 32 хранения результатов распознавания сохраняет информацию относительно скрытой области 14, скрытой от датчика 21 посредством блокирующего объекта 13, обнаруженного посредством модуля 31 обнаружения объектов.
[0020] Модуль 33 определения точек пересечения определяет точку A1 пересечения транспортного средства 11, точку A2 пересечения отслеживаемого транспортного средства 12 и точку A3 пересечения встречного транспортного средства 15, на основе информации объектов, сохраненной в модуле 32 хранения результатов распознавания. Точка A1 пересечения транспортного средства 11 и точка A2 пересечения отслеживаемого транспортного средства 12 задаются посредством точки пересечения маршрута 16 движения транспортного средства 11 и маршрута 17 движения отслеживаемого транспортного средства 12. Точка A3 пересечения встречного транспортного средства 15 задается посредством позиции на маршруте 18 движения встречного транспортного средства 15, в которой встречное транспортное средство 15 вплотную приближается к блокирующему объекту 13.
[0021] Модуль 34 оценки времени прибытия оценивает времена T, требуемые для транспортного средства 11, отслеживаемого транспортного средства 12 и встречного транспортного средства 15, чтобы достигать точек A1, A2 и A3 пересечения, соответственно, на основе информации объектов, сохраненной в модуле 32 хранения результатов распознавания, и точек A пересечения, определенных посредством модуля 33 определения точек пересечения. Модуль 34 оценки времени прибытия вычисляет время Ts, требуемое для транспортного средства 11, чтобы достигать точки A1 пересечения, из скорости транспортного средства 11 и расстояния от транспортного средства 11 до точки A1 пересечения. Модуль 34 оценки времени прибытия вычисляет время Tt, требуемое для отслеживаемого транспортного средства 12, чтобы достигать точки A2 пересечения, из скорости отслеживаемого транспортного средства 12 и расстояния от отслеживаемого транспортного средства 12 до точки A2 пересечения. Модуль 34 оценки времени прибытия вычисляет время To, требуемое для встречного транспортного средства 15, чтобы достигать точки A3 пересечения, из скорости встречного транспортного средства 15 и расстояния от встречного транспортного средства 15 до точки A3 пересечения.
[0022] Модуль 35 управления транспортным средством управляет приведением в движение транспортного средства 11 посредством управления приводными механизмами транспортного средства 11, такими как устройство 25 рулевого управления и тормозное устройство 26. Модуль 35 управления транспортным средством управляет транспортным средством 11 таким образом, что транспортное средство 11 движется по маршруту 16 движения, заданному заранее.
[0023] Способ управления транспортным средством
Со ссылкой на блок-схемы последовательности операций способа фиг. 3 и 4, в дальнейшем описывается пример способа управления транспортным средством с использованием устройства 20 управления транспортным средством. Как проиллюстрировано на фиг. 2, ниже предоставляется описание для примера окружения, в котором транспортное средство 11, имеющее устройство 20 управления транспортным средством, въезжает в поток в ближайшей полосе движения на дороге 10 впереди.
[0024] Дорога 10 идет в направлении, ортогональном к направлению движения транспортного средства 11. В левой передней стороне транспортного средства 11 расположен блокирующий объект 13, который представляет собой припаркованное транспортное средство, в позиции, в которой блокирующий объект 13 перегораживает движение отслеживаемого транспортного средства 12 в полосе движения, в которой движется отслеживаемое транспортное средство 12. Блокирующий объект 13 расположен на противоположной стороне относительно встречной полосы движения в полосе движения, в которой движется отслеживаемое транспортное средство 12. Блокирующий объект 13 создает скрытую область 14, скрытую от датчика 21 в полосе движения, в которой движется отслеживаемое транспортное средство 12. На встречной полосе движения, которая представляет собой полосу движения на дальней стороне дороги 10, движется встречное транспортное средство 15 в направлении к отслеживаемому транспортному средству 12. Транспортное средство 11 собирается въезжать в поток в полосе движения, в которой движется отслеживаемое транспортное средство 12.
[0025] Во-первых, на этапе S10, датчик 21 получает информацию относительно окружения, включающего в себя отслеживаемый объект (отслеживаемое транспортное средство 12). В примере, проиллюстрированном на фиг. 2, датчик 21 получает информацию позиции, по меньшей мере, относительно нескольких объектов впереди транспортного средства 11.
[0026] На этапе S11, модуль 31 обнаружения объектов обнаруживает несколько наблюдаемых объектов и информацию объектов для каждого объекта, на основе информации, полученной на этапе S10. Несколько наблюдаемых объектов включают в себя отслеживаемое транспортное средство 12, движущееся за пределами скрытой области 14, блокирующий объект 13, создающий скрытую область 14, и встречное транспортное средство 15, движущееся в полосе движения, противоположной относительно отслеживаемого транспортного средства 12.
[0027] На этапе S12, модуль 32 хранения результатов распознавания отображает информацию объектов относительно наблюдаемых объектов, обнаруженных на этапе S11, и информацию объектов относительно транспортного средства 11 в картографических данных, на основе картографических данных, собственной позиции и информации перемещения.
[0028] На этапе S13, модуль 33 определения точек пересечения определяет точки A1, A2 и A3 пересечения транспортного средства 11, отслеживаемого транспортного средства 12 и встречного транспортного средства 15, на основе информации объектов, отображаемой на этапе S12. Точки A1 и A2 пересечения, в общем, позиционируются в полосе движения дороги 10 впереди транспортного средства 11. Точка A3 пересечения встречного транспортного средства 15 указывает позицию, в которой встречное транспортное средство 15 может пересекать отслеживаемое транспортное средство 12, когда отслеживаемое транспортное средство 12 движется с выездом на встречную полосу движения, чтобы объезжать блокирующий объект 13.
[0029] На этапе S14, модуль 34 оценки времени прибытия вычисляет время To, требуемое для встречного транспортного средства 15, чтобы достигать точки A3 пересечения, на основе информации перемещения относительно встречного транспортного средства 15, отображаемой на этапе S12, и точки A3 пересечения, определенной на этапе S13.
[0030] На этапе S15, модуль 34 оценки времени прибытия вычисляет время Ts, требуемое для транспортного средства 11, чтобы достигать точки A1 пересечения, на основе информации перемещения относительно транспортного средства 11, отображаемой на этапе S12, и точки A1 пересечения, определенной на этапе S13. Модуль 34 оценки времени прибытия может вычислять время Ts, на основе информации перемещения, полученной посредством модуля 24 получения информации перемещения.
[0031] На этапе S16, модуль 34 оценки времени прибытия вычисляет время Tt, требуемое для отслеживаемого транспортного средства 12, чтобы достигать точки A2 пересечения, на основе информации перемещения относительно отслеживаемого транспортного средства 12, отображаемой на этапе S12, и точки A2 пересечения, определенной на этапе S13. Время Tt представляет собой сумму времени Tt1, требуемого для отслеживаемого транспортного средства 12, чтобы достигать точки A3 пересечения, и времени Tt2, требуемого для отслеживаемого транспортного средства 12, чтобы достигать точки A2 пересечения, от времени, когда отслеживаемое транспортное средство 12 проезжает через точку A3 пересечения.
[0032] В этом варианте осуществления предполагается, что то, какое из отслеживаемого транспортного средства 12 и встречного транспортного средства 15 должно обогнать блокирующий объект 13 первым, не может прогнозироваться простым образом. Соответственно, время Tt1 может рассматриваться в качестве времени до тех пор, пока отслеживаемое транспортное средство 12 не встретится со встречным транспортным средством 15 в точке A3 пересечения. Другими словами, время Tt1 представляет собой время To, вычисленное на этапе S14. Помимо этого, время Tt1 приблизительно представляет собой время проезда до тех пор, пока отслеживаемое транспортное средство 12 не обгонит блокирующий объект 13.
[0033] Когда отслеживаемое транспортное средство 12 движется за пределами скрытой области 14, время Tt2 вычисляется из информации перемещения относительно отслеживаемого транспортного средства 12, отображаемой на этапе S12, и расстояния от точки A3 пересечения до точки A2 пересечения.
[0034] В то время, когда отслеживаемое транспортное средство 12 движется в скрытой области 14, информация перемещения относительно отслеживаемого транспортного средства 12 не может получаться. Следовательно, при условии, что отслеживаемое транспортное средство 12, движущееся в скрытой области 14, движется к точке A3 пересечения приблизительно с идентичной скоростью со встречным транспортным средством 15, время Tt2 оценивается из скорости встречного транспортного средства 15, отображаемой на этапе S12, и расстояния от точки A3 пересечения до точки A2 пересечения. Таким образом, время Tt2 приблизительно представляет собой время прибытия, требуемое для отслеживаемого транспортного средства 12, чтобы достигать передней части транспортного средства 11. Следует отметить, что при условии, что отслеживаемое транспортное средство 12 движется в скрытой области 14 со скоростью, идентичной скорости до въезда в скрытую область 14, время Tt2 может оцениваться из скорости отслеживаемого транспортного средства 15 до въезда в скрытую область 14 и расстояния от точки A3 пересечения до точки A2 пересечения.
[0035] После этапа S17, модуль 35 управления транспортным средством определяет регулирование скорости для транспортного средства 11, используемое до тех пор, пока транспортное средство 11 не достигнет точки A1 пересечения, и оценивает то, следует или нет проезжать через точку A1 пересечения, на основе информации объектов относительно наблюдаемых объектов, отображаемых на этапе S12, и точек A1-A3 пересечения и времен To, Ts и Tt, полученных на этапах S13-S16.
[0036] На этапе S17, модуль 35 управления транспортным средством оценивает то, замедлилось или нет встречное транспортное средство 15, на основе информации перемещения относительно встречного транспортного средства 15, отображаемой на этапе S12. При оценке того, что встречное транспортное средство 15 замедлилось, модуль 35 управления транспортным средством переводит процесс на этап S18, и при оценке того, оно не замедлилось, модуль 35 управления транспортным средством переводит процесс на этап S28.
[0037] На этапе S18, модуль 35 управления транспортным средством оценивает то, превышает или нет время Tt1, вычисленное на этапе S16, время Ts, вычисленное на этапе S15. Из результата, модуль 35 управления транспортным средством определяет то, должно или нет транспортное средство 11 достигать точки A1 пересечения до того, как отслеживаемое транспортное средство 12 достигает точки A3 пересечения. При оценке того, что транспортное средство 11 должно достигать точки A1 пересечения раньше, модуль 35 управления транспортным средством переводит процесс на этап S19, и при оценке того, что оно должно достигать позже, модуль 35 управления транспортным средством переводит процесс на этап S50.
[0038] На этапе S19, модуль 35 управления транспортным средством управляет устройством 25 рулевого управления, тормозным устройством 26 и т.п. транспортного средства 11 с тем, чтобы замедлять транспортное средство 11, чтобы избегать пересечения транспортного средства 11 с отслеживаемым транспортным средством 12.
[0039] На этапе S50, при оценке на этапе S18 того, что транспортное средство 11 должно достигать точки A1 пересечения позднее, модуль 35 управления транспортным средством управляет тормозным устройством 26 и т.п. транспортного средства 11, чтобы инструктировать транспортному средству 11 ехать.
[0040] На этапе S20, модуль 35 управления транспортным средством определяет то, достигает или нет транспортное средство 11 точки A0 пересечения около края дороги 10, на основе информации перемещения относительно транспортного средства 11, отображаемой на этапе S12. При оценке того, что транспортное средство 11 достигает точки A0 пересечения около края дороги 10, модуль 35 управления транспортным средством переводит процесс на этап S21, и при оценке того, что оно не достигает, модуль 35 управления транспортным средством возвращает процесс на этап S10.
[0041] На этапе S21, модуль 35 управления транспортным средством задает время Tt1, вычисленное на этапе S16, в качестве времени остановки для транспортного средства 11. Следует отметить, что время остановки может задаваться намного больше как время Tt1+время Tt2. В этом случае, если отслеживаемое транспортное средство 12 скрывается в скрытой области 14, время остановки вычисляется на основе скорости отслеживаемого транспортного средства 12 и расстояния между точками A2 и A3 пересечения. Если отслеживаемое транспортное средство 12 не скрывается, время остановки вычисляется на основе скорости встречного транспортного средства 15 и расстояния между точками A2 и A3 пересечения.
[0042] На этапе S22, модуль 35 управления транспортным средством управляет устройством 25 рулевого управления и тормозным устройством 26 транспортного средства 11 таким образом, что транспортное средство 11 останавливается или замедляется перед дорогой 10.
[0043] На этапах S23-S25, выполняется обработка, идентичная обработке на этапах S10-S12, и модуль 32 хранения результатов распознавания обновляет информацию объектов относительно каждого наблюдаемого объекта.
[0044] На этапе S26, модуль 35 управления транспортным средством оценивает то, прошло или нет время остановки после обработки на этапе S22 без наблюдения отслеживаемого транспортного средства 12, либо то, проехало или нет отслеживаемое транспортное средство 12 через точку A2 пересечения, на основе времени остановки, заданного на этапе S21, и информации перемещения относительно отслеживаемого транспортного средства 12. Если одно из условий удовлетворяется, модуль 35 управления транспортным средством переводит процесс на этап S27, а если ни одно из условий не удовлетворяется, модуль 35 управления транспортным средством возвращает процесс на этап S23.
[0045] На этапе S27, при оценке того, что вероятность вхождения в контакт с отслеживаемым транспортным средством 12 является низкой, поскольку отслеживаемое транспортное средство 12 остановлено или замедлилось в скрытой области 14, или отслеживаемое транспортное средство 12 уже проехало через точку A2 пересечения, модуль 35 управления транспортным средством трогает с места транспортное средство 11 и инструктирует ему въезжать на дорогу 10. Когда оценивается то, что отслеживаемое транспортное средство 12 остановлено или замедлилось в скрытой области 14, отслеживаемое транспортное средство 12 может выезжать позднее. Таким образом, в этом случае, модуль 35 управления транспортным средством инструктирует транспортному средству 11 медленно ехать по мере того, как оно въезжает на дорогу 10.
[0046] На этапе S28, модуль 35 управления транспортным средством оценивает то, является или нет время Tt (=Tt1+Tt2), вычисленное на этапе S16, достаточно большим по сравнению со временем Ts, вычисленным на этапе S15. Модуль 35 управления транспортным средством, например, оценивает то, превышает или равно либо нет время Tt заданному пороговому значению, определенному на основе времени Ts. Если время Tt превышает или равно пороговому значению, модуль 35 управления транспортным средством оценивает то, что время Tt является достаточно большим. При оценке того, что время Tt является достаточно большим, модуль 35 управления транспортным средством переводит процесс на этап S29, и при оценке того, что оно не является достаточно большим, модуль 35 управления транспортным средством переводит процесс на этап S30.
[0047] На этапе S29, при оценке того, что транспортное средство 11 может проезжать через точку A1 пересечения безопасно до того, как отслеживаемое транспортное средство 12 достигает точки A2 пересечения, модуль 35 управления транспортным средством инструктирует транспортному средству 11 ехать и въезжать на дорогу 10.
[0048] На этапе S30, модуль 35 управления транспортным средством оценивает то, достигает или нет встречное транспортное средство 15 заданного диапазона расстояний от точки A3 пересечения или блокирующего объекта 13, на основе информации объектов относительно встречного транспортного средства 15, отображаемой на этапе S12. При оценке того, что встречное транспортное средство 15 достигает заданного диапазона расстояний, модуль 35 управления транспортным средством переводит процесс на этап S31, и при оценке того, что оно не достигает, модуль 35 управления транспортным средством переводит процесс на этап S32.
[0049] На этапе S31, модуль 35 управления транспортным средством оценивает то, что отслеживаемое транспортное средство 12 не должно выезжать из скрытой области 14 посредством движения с выездом на встречную полосу движения, и в силу этого транспортное средство 11 может проезжать через точку A1 пересечения безопасно, и модуль 35 управления транспортным средством инструктирует транспортному средству 11 ехать и въезжать на дорогу 10.
[0050] На этапе S32, модуль 35 управления транспортным средством оценивает то, остановлено или нет едущее сзади транспортное средство 19 позади отслеживаемого транспортного средства 12, на основе информации объектов относительно наблюдаемых объектов, отображаемых на этапе S12. При оценке того, что едущее сзади транспортное средство 19 остановлено, модуль 35 управления транспортным средством переводит процесс на этап S33, и при оценке того, оно не остановлено, либо отсутствует едущее сзади транспортное средство, модуль 35 управления транспортным средством переводит процесс на этап S34.
[0051] На этапе S33, модуль 35 управления транспортным средством оценивает то, что отслеживаемое транспортное средство 12 не должно выезжать из скрытой области 14 посредством движения с выездом на встречную полосу движения, и в силу этого транспортное средство 11 может проезжать через точку A1 пересечения безопасно, и модуль 35 управления транспортным средством инструктирует транспортному средству 11 ехать и въезжать на дорогу 10.
[0052] На этапе S34, модуль 35 управления транспортным средством оценивает то, является или нет время Tt2, вычисленное на этапе S16, в достаточной степени большим по сравнению со временем Ts, вычисленным на этапе S15. Модуль 35 управления транспортным средством, например, оценивает то, превышает или равно либо нет время Tt2 заданному пороговому значению, определенному на основе времени Ts. Если время Tt2 превышает или равно пороговому значению, модуль 35 управления транспортным средством оценивает то, что время Tt является достаточно большим. При оценке того, что время Tt2 является достаточно большим, модуль 35 управления транспортным средством переводит процесс на этап S35, при оценке того, что оно не является достаточно большим, модуль 35 управления транспортным средством переводит процесс на этап S36.
[0053] На этапе S35, модуль 35 управления транспортным средством оценивает то, что транспортное средство 11 может проезжать через точку A1 пересечения безопасно, даже если отслеживаемое транспортное средство 12 выезжает из скрытой области 14 за счет движения с выездом на встречную полосу движения, и модуль 35 управления транспортным средством инструктирует транспортному средству 11 ехать и въезжать на дорогу 10.
[0054] На этапе S36, модуль 35 управления транспортным средством оценивает то, что транспортное средство 11 может входить в контакт с отслеживаемым транспортным средством 12, и управляет устройством 25 рулевого управления, тормозным устройством 26 и т.п. транспортного средства 11 таким образом, что транспортное средство 11 останавливается в точке A0 пересечения около края дороги 10.
[0055] На этапах S37-S39, выполняется обработка, идентичная обработке на этапах S10-S12, и модуль 32 хранения результатов распознавания обновляет информацию объектов относительно наблюдаемых объектов.
[0056] На этапе S40, модуль 35 управления транспортным средством оценивает то, проехало или нет отслеживаемое транспортное средство 12 через точку A2 пересечения, на основе информации объектов относительно отслеживаемого транспортного средства 12, отображаемой на этапе S39. При оценке того, что отслеживаемое транспортное средство 12 проехало через точку A2 пересечения, модуль 35 управления транспортным средством переводит процесс на этап S41, и при оценке того, что оно не проехало, модуль 35 управления транспортным средством возвращает процесс на этап S37.
[0057] На этапе S41, модуль 35 управления транспортным средством оценивает то, что вероятность вхождения в контакт с отслеживаемым транспортным средством 12 является низкой, поскольку отслеживаемое транспортное средство 12 уже проехало через точку A2 пересечения, и модуль 35 управления транспортным средством инструктирует транспортному средству 11 ехать и въезжать на дорогу 10.
[0058] Последовательность процессов, проиллюстрированных на фиг. 3 и 4, является примером, и могут быть предусмотрены другие различные процессы обработки исключений. Например, когда неожиданная ситуация обнаруживается в ходе вышеуказанных процессов, процессы обновления на этапах S10-S12, этапах S23-S25 или этапах S37-S39 могут выполняться, и последующие процессы могут продолжаться.
[0059] Пример работы
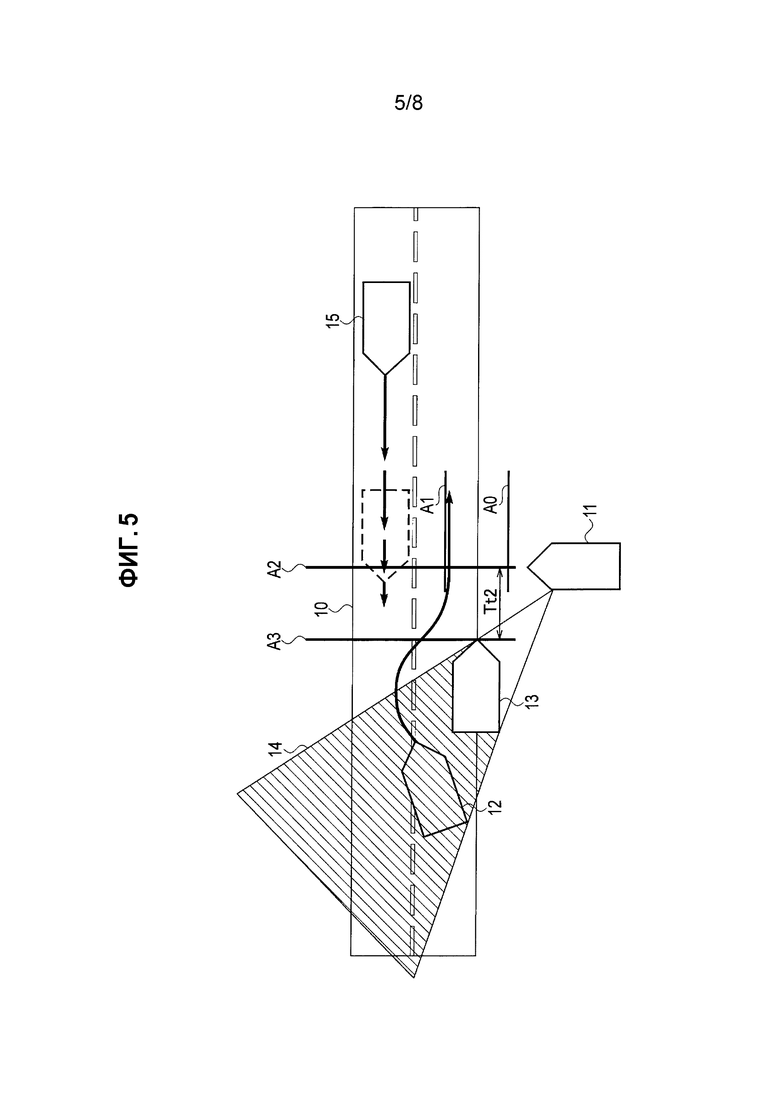
Фиг. 5 является схемой для пояснения окружения, в котором отслеживаемое транспортное средство 12 и встречное транспортное средство 15 встречаются друг с другом около точки A3 пересечения, и встречное транспортное средство 15 замедляется или останавливается. В этом окружении, отслеживаемое транспортное средство 12, при оценке того, что существует достаточное расстояние до встречного транспортного средства 15, выезжает на встречную полосу движения, чтобы объезжать блокирующий объект 13. С другой стороны, встречное транспортное средство 15, при оценке того, что возникает риск вхождения в контакт с отслеживаемым транспортным средством 12, замедляется или останавливается перед точкой A3 пересечения.
[0060] В этом случае, модуль 35 управления транспортным средством на этапе S17 оценивает то, что встречное транспортное средство 15 замедлилось. Поскольку встречное транспортное средство 15 замедлилось, прогнозируется то, что отслеживаемое транспортное средство 12 должно двигаться с выездом на встречную полосу движения и выезжать из скрытой области 14. Таким образом, модуль 35 управления транспортным средством останавливает или замедляет транспортное средство 11 перед дорогой 10 (например, в точке A0 пересечения) на этапе S22 и ожидает до въезда на дорогу 10, что позволяет избегать пересечения транспортного средства 11 с отслеживаемым транспортным средством 12.
[0061] Альтернативно, после оценки того, что встречное транспортное средство 15 замедлилось, если время Tt1, вычисленное на этапе S16, меньше заданного порогового значения, определенного на основе времени Ts, модуль 35 управления транспортным средством может замедлять транспортное средство 11 на этапе S18. Это позволяет транспортному средству 11 начинать замедление до того, как отслеживаемое транспортное средство 12 выезжает из скрытой области 14, и это предотвращает ситуацию, когда транспортное средство 11 обнаруживает отслеживаемое транспортное средство 12, внезапно выезжающее из скрытой области 14, и выполняет быстрое замедление.
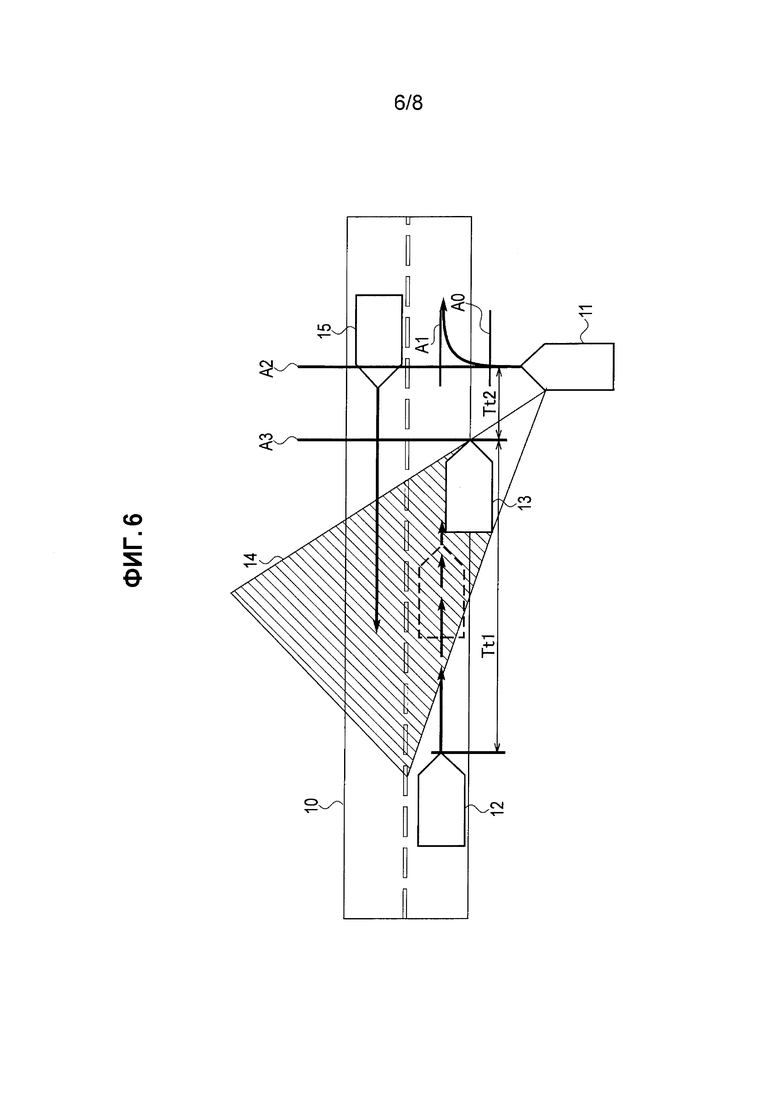
[0062] Фиг. 6 является схемой для пояснения окружения, в котором отслеживаемое транспортное средство 12 и встречное транспортное средство 15 встречаются друг с другом около точки A3 пересечения, и отслеживаемое транспортное средство 12 замедляется или останавливается. В этом окружении, отслеживаемое транспортное средство 12 оценивает то, что опасно выезжать на встречную полосу движения, чтобы объезжать блокирующий объект 13, поскольку встречное транспортное средство 15 находится очень близко к точке A3 пересечения, и отслеживаемое транспортное средство 12 замедляется или останавливается в скрытой области 14.
[0063] В этом случае, модуль 35 управления транспортным средством на этапе S17 оценивает то, что встречное транспортное средство 15 не должно замедляться. Поскольку встречное транспортное средство 15 движется без замедления, прогнозируется то, что отслеживаемое транспортное средство 12 не должно выезжать из скрытой области 14, объезжая блокирующий объект 13 и встречное транспортное средство 15. Таким образом, модуль 35 управления транспортным средством может инструктировать транспортному средству 11 въезжать на дорогу 10 плавно на этапе S31.
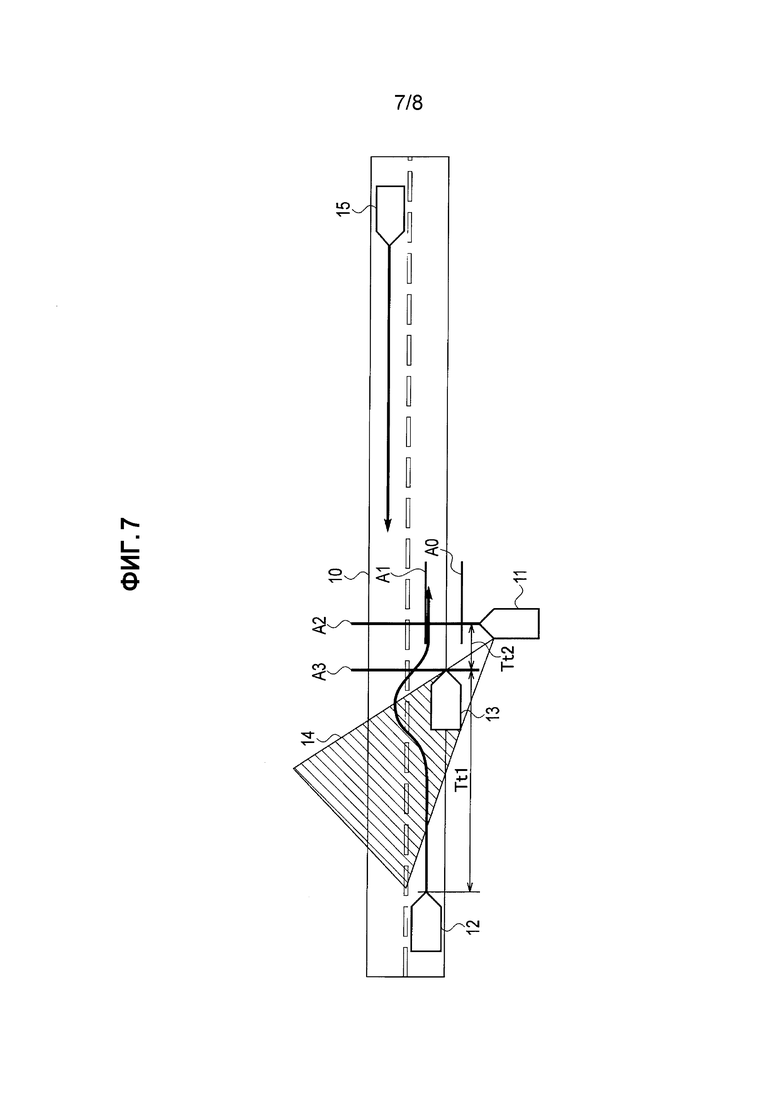
[0064] Фиг. 7 является схемой, поясняющей окружение, в котором как отслеживаемое транспортное средство 12, так и встречное транспортное средство 15 движутся без замедления. В этом окружении, поскольку встречное транспортное средство 15 находится на достаточно большом расстоянии от точки A3 пересечения, и отслеживаемое транспортное средство 12, может проезжать через точку A3 пересечения раньше, чем должно проезжать встречное транспортное средство 15, как отслеживаемое транспортное средство 12, так и встречное транспортное средство 15 движутся без замедления.
[0065] В этом случае, прогнозируется то, что отслеживаемое транспортное средство 12 внезапно выезжает из скрытой области 14. Таким образом, модуль 34 оценки времени прибытия вычисляет время Tt, требуемое для отслеживаемого транспортного средства 12, чтобы достигать точки A2 пересечения, и модуль 35 управления транспортным средством оценивает то, следует или нет ехать, в зависимости от времени Tt. Например, если на этапе S28 оценивается то, что время Tt является достаточно большим, поскольку отслеживаемое транспортное средство 12 еще не въехало в скрытую область 14, вероятность вхождения в контакт транспортного средства 11 с отслеживаемым транспортным средством 12 является низкой, и в силу этого транспортное средство 11 может въезжать на дорогу 10 на этапе S29. Помимо этого, также в случае, если на этапе S34 оценивается то, что время Tt2 является достаточно большим, поскольку даже если отслеживаемое транспортное средство 12 находится в скрытой области 14, расстояние от скрытой области 14 до точки A2 пересечения является достаточно большим; вероятность вхождения в контакт транспортного средства 11 с отслеживаемым транспортным средством 12 является низкой, и в силу этого транспортное средство 11 может въезжать на дорогу 10 на этапе S35.
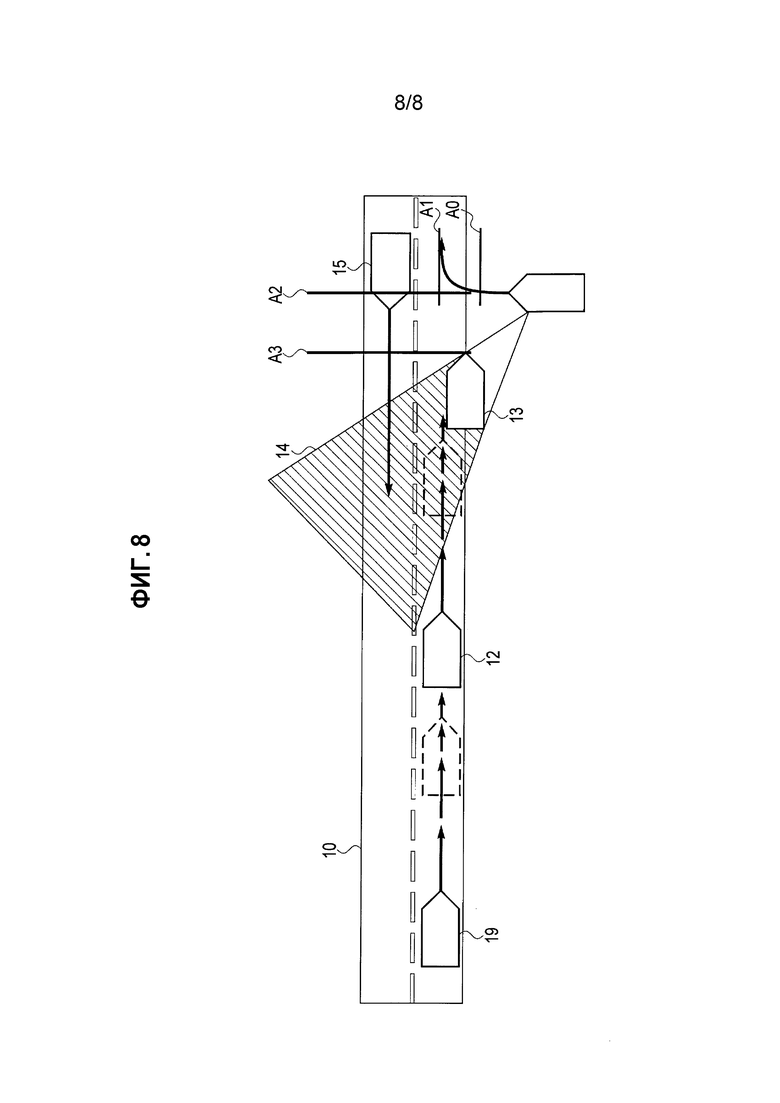
[0066] Фиг. 8 является схемой для пояснения окружения, в котором отслеживаемое транспортное средство 12 замедляется или останавливается в скрытой области 14, и в силу этого едущее сзади транспортное средство 19 позади отслеживаемого транспортного средства 12 замедляется или останавливается. В этом окружении, поскольку обнаруживается то, что едущее сзади транспортное средство 19 замедлилось, предполагается, что отслеживаемое транспортное средство 12 в скрытой области 14 замедлилось или остановлено. Таким образом, модуль 35 управления транспортным средством может инструктировать транспортному средству 11 въезжать на дорогу 10 плавно на этапе S33. Следует отметить, что в случаях, отличных от вышеописанных, модуль 35 управления транспортным средством оценивает то, следует или нет ехать, согласно процедуре от этапа S28 до S41 на фиг. 4.
[0067] Устройство 20 управления транспортным средством согласно этому варианту осуществления оценивает поведение отслеживаемого транспортного средства 12 из поведения встречного транспортного средства 15 в случае, если поведение отслеживаемого транспортного средства 12 не может обнаруживаться вследствие присутствия отслеживаемого транспортного средства 12 в скрытой области 14. Это позволяет устройству 20 управления транспортным средством управлять транспортным средством согласно поведению отслеживаемого транспортного средства 12 и избегать вхождения в контакт транспортного средства 11 с отслеживаемым транспортным средством 12, и в силу этого оно повышает уровень безопасности.
[0068] Помимо этого, в случае если встречное транспортное средство 15 замедляется, и время Tt1 до тех пор, пока отслеживаемое транспортное средство 12 не обгонит блокирующий объект 13, меньше заданного порогового значения, устройство 20 управления транспортным средством замедляет транспортное средство 11. Это позволяет транспортному средству 11 начинать замедление до того, как отслеживаемое транспортное средство 12 выезжает из скрытой области 14 в случае, если отслеживаемое транспортное средство 12 находится в скрытой области 14, уменьшая число шансов на то, что транспортное средство 11 обнаруживает отслеживаемое транспортное средство 12, внезапно выезжающее из скрытой области 14, и выполняет быстрое замедление. Таким образом, это улучшает комфорт при вождении.
[0069] Помимо этого, устройство 20 управления транспортным средством задает время остановки, в течение которого транспортное средство 11 останавливается в точке A0 пересечения около края дороги 10, на основе времени Tt2, требуемого для отслеживаемого транспортного средства 12, чтобы достигать передней части транспортного средства 11 после обгона блокирующего объекта 13. Это предотвращает увеличение времени ожидания больше, чем требуется, даже, например, в случае, когда отслеживаемое транспортное средство 12 останавливается в скрытой области 14, и позволяет трогать с места транспортное средство после минимального времени ожидания.
[0070] Помимо этого, в случае если встречное транспортное средство 15 не замедляется, и если время Tt1 или время Tt до тех пор, пока отслеживаемое транспортное средство 12 не обгонит блокирующий объект 13, превышает заданное пороговое значение, устройство 20 управления транспортным средством инструктирует транспортному средству 11 ехать. Это предотвращает замедление транспортного средства 11 без необходимости, когда отслеживаемое транспортное средство 12 движется в позиции на достаточно большом расстоянии, позволяя транспортному средству 11 въезжать на дорогу 10 плавно.
[0071] Помимо этого, когда встречное транспортное средство 15 находится в пределах заданного диапазона расстояний от блокирующего объекта 13, устройство 20 управления транспортным средством инструктирует транспортному средству 11 ехать. В этом случае, предполагается, что отслеживаемое транспортное средство 12 остановлено или замедлилось в скрытой области 14, чтобы уступать дорогу встречному транспортному средству 15. Это предотвращает замедление транспортного средства 11 без необходимости, когда отслеживаемое транспортное средство 12 скрывается от датчика 21, позволяя транспортному средству 11 въезжать на дорогу 10 плавно.
[0072] Помимо этого, устройство 20 управления транспортным средством инструктирует транспортному средству 11 ехать, когда едущее сзади транспортное средство 19 позади отслеживаемого транспортного средства 12 замедлилось или остановлено. В этом случае, предполагается, что отслеживаемое транспортное средство 12 остановлено или замедлилось в скрытой области 14, чтобы уступать дорогу встречному транспортному средству 15. Это предотвращает замедление транспортного средства 11 без необходимости, когда отслеживаемое транспортное средство 12 скрывается от датчика 21, позволяя транспортному средству 11 въезжать на дорогу 10 плавно.
[0073] Другие варианты осуществления
Как описано выше, настоящее изобретение описывается с использованием вышеприведенного варианта осуществления. Тем не менее, не следует понимать, что описание и чертежи, составляющие часть этого раскрытия сущности, ограничивают настоящее изобретение. Из этого раскрытия сущности, различные альтернативные варианты осуществления, примеры и технологии работы должны становиться очевидными для специалистов в данной области техники.
[0074] Например, в варианте осуществления, уже описанном, блокирующий объект 13 не ограничен припаркованным транспортным средством и может представлять собой планиметрический признак около дороги 10. Помимо этого, дорога 10 может представлять собой дорогу, пересекающую дорогу, по которой движется транспортное средство 11.
[0075] Как и следовало ожидать, помимо вышеуказанного, настоящее изобретение включает в себя различные варианты осуществления и т.п., не описанные в данном документе, к примеру, конфигурации, к которым взаимно применяются вышеуказанные конфигурации. Таким образом, объем настоящего изобретения определяется только посредством предметов, указывающих изобретение согласно формуле изобретения, релевантных для вышеприведенного описания.
Список ссылочных обозначений
[0076] 11 - транспортное средство
12 - отслеживаемое транспортное средство
13 - блокирующий объект
15 - встречное транспортное средство
19 - едущее сзади транспортное средство
20 - устройство управления транспортным средством
21 - датчик
30 - схема управления.
Способ управления транспортным средством включает в себя: обнаружение блокирующего объекта, который находится в позиции, в которой блокирующий объект перегораживает движение отслеживаемого транспортного средства в полосе движения, в которой движется отслеживаемое транспортное средство, и который скрывает, по меньшей мере, часть полосы движения от датчика, и встречного транспортного средства, движущегося в направлении к отслеживаемому транспортному средству по встречной полосе движения, противоположной относительно полосы движения; и замедление транспортного средства, когда встречное транспортное средство замедляется. Повышается безопасность движения. 2 н. и 5 з.п. ф-лы, 8 ил. 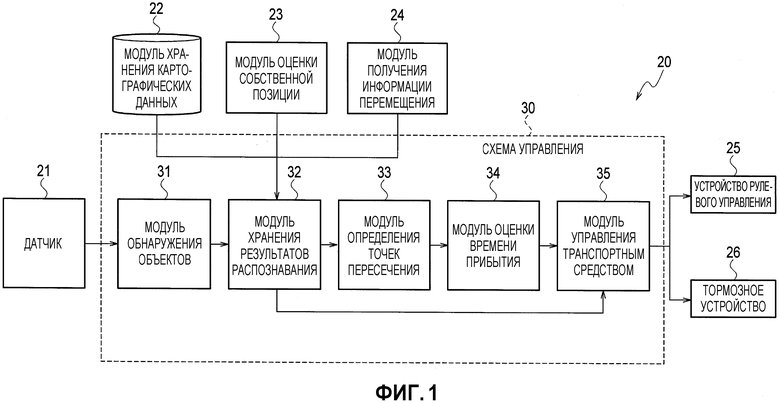
1. Способ управления транспортным средством с использованием датчика, обнаруживающего информацию позиции относительно объекта около транспортного средства, и схемы управления, управляющей транспортным средством согласно отслеживаемому транспортному средству, обнаруженному на основе информации позиции, при этом способ содержит этапы, на которых:
- обнаруживают, посредством схемы управления, блокирующий объект, который находится в позиции, в которой блокирующий объект перегораживает движение отслеживаемого транспортного средства в полосе движения, в которой движется отслеживаемое транспортное средство, и который скрывает, по меньшей мере, часть полосы движения от датчика, и встречное транспортное средство, движущееся в направлении к отслеживаемому транспортному средству по встречной полосе движения, противоположной относительно полосы движения; и
- замедляют транспортное средство посредством схемы управления, когда встречное транспортное средство замедляется,
при этом, когда транспортное средство приводится в движение так, чтобы выехать на ближайшую полосу движения дороги, простирающейся в направлении, перпендикулярном или пересекающемся с направлением движения транспортного средства, и имеющей две полосы движения в противоположных направлениях, блокирующий объект располагается вблизи ближайшей полосы движения дороги.
2. Способ управления транспортным средством по п. 1, в котором:
- схема управления оценивает время проезда до тех пор, пока отслеживаемое транспортное средство не проедет через область, скрытую посредством блокирующего объекта, на основе скорости встречного транспортного средства и расстояния от встречного транспортного средства до блокирующего объекта, и
- схема управления замедляет транспортное средство, когда встречное транспортное средство замедляется, и время проезда меньше заданного порогового значения.
3. Способ управления транспортным средством по п. 1 или 2, в котором:
- схема управления оценивает время прибытия после того, как отслеживаемое транспортное средство обгоняет блокирующий объект, до тех пор, пока отслеживаемое транспортное средство не достигнет передней части транспортного средства, на основе скорости встречного транспортного средства и расстояния от передней части транспортного средства до блокирующего объекта, и
- схема управления задает время остановки для транспортного средства на основе времени прибытия.
4. Способ управления транспортным средством по п. 1 или 2, в котором:
- схема управления оценивает время проезда до тех пор, пока отслеживаемое транспортное средство не проедет через скрытую область, вызываемую посредством блокирующего объекта, на основе скорости встречного транспортного средства и расстояния от встречного транспортного средства до блокирующего объекта, и
- схема управления не замедляет транспортное средство, когда встречное транспортное средство не замедляется, и время проезда превышает или равно заданному пороговому значению.
5. Способ управления транспортным средством по п. 1 или 2, в котором:
- схема управления не замедляет транспортное средство, когда встречное транспортное средство находится в пределах заданного диапазона расстояний от блокирующего объекта.
6. Способ управления транспортным средством по п. 1 или 2, в котором:
- схема управления не замедляет транспортное средство, когда едущее сзади транспортное средство позади отслеживаемого транспортного средства остановлено.
7. Контроллер транспортного средства, содержащий:
- датчик, обнаруживающий информацию позиции относительно объекта около транспортного средства; и
- схему управления, управляющую транспортным средством согласно отслеживаемому транспортному средству, обнаруженному на основе информации позиции, при этом:
- схема управления обнаруживает блокирующий объект, который находится в позиции, в которой блокирующий объект перегораживает движение отслеживаемого транспортного средства в полосе движения, в которой движется отслеживаемое транспортное средство, и который скрывает, по меньшей мере, часть полосы движения от датчика, и встречное транспортное средство, движущееся в направлении к отслеживаемому транспортному средству по встречной полосе движения, противоположной относительно полосы движения,
- схема управления замедляет транспортное средство, когда встречное транспортное средство замедляется, и
при этом, когда транспортное средство приводится в движение так, чтобы выехать на ближайшую полосу движения дороги, простирающейся в направлении, перпендикулярном или пересекающемся с направлением движения транспортного средства, и имеющей две полосы движения в противоположных направлениях, блокирующий объект располагается вблизи ближайшей полосы движения дороги.
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2570982C2 |
| US 20150224988 A1, 13.08.2015 | |||
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2450365C2 |
| US 20150175159 A1, 25.06.2015. | |||

