Ссылка на родственную заявку
Данная заявка испрашивает приоритет согласно предварительной заявке на патент США №62/116031 (документ поверенного №911-019.019-1/FB&GX0016US), зарегистрированной 13 февраля 2015 г. под названием "No flow detection means for sensorless pumping control applications", которая полностью включена в описание путем ссылки на соответствующий источник.
Данное изобретение основывается на семействе технологий, раскрытых в других родственных заявках, указанных ниже.
Предпосылки создания изобретения
1. Область техники, к которой относится изобретение
Данное изобретение касается технологии для применений управления насосом; и более конкретно, данное изобретение касается способа и устройства для определения, когда есть требование отсутствия потока в насосной системе, с использованием параметров работы двигателя, таких как ток и вращающий момент, и управления применениями управления насосом, основанного на этом определении.
2. Краткое описание предшествующего уровня техники
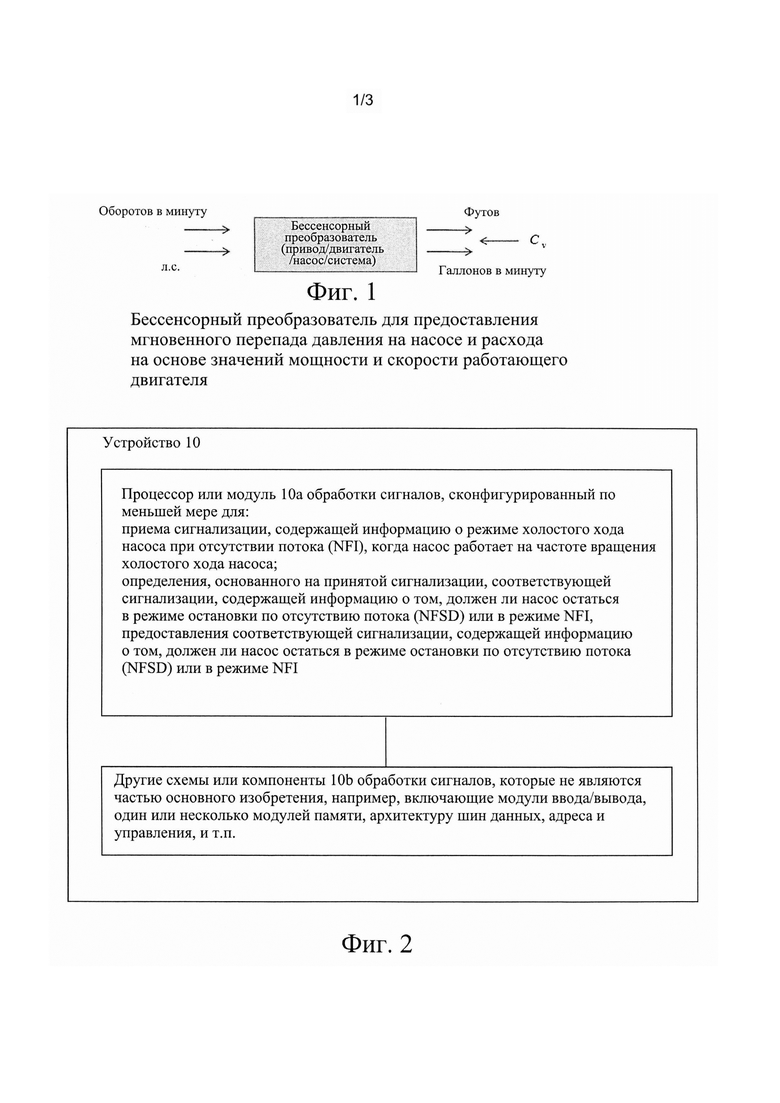
В последнее время устройства управления насосом с регулируемой частотой вращения с энергосберегающими и бессенсорными средствами управления известны для применений управления перекачкой жидкости, например, как раскрыто в заявках на патент, описания которых включены в данный документ путем ссылок на источники, обозначенные ниже от [1] до [7]. Бессенсорный преобразователь, как показано схематично на фиг. 1, выдает значения напора (foot, ft - футов) и расхода (Gallons, GPM - галлонов в минуту) системы при предоставлении параметров мощности (тока или вращающего момента) и скорости вращения двигателя, например, как раскрыто в заявках на патент [3-7]. Как известно специалистам в данной области техники, бессенсорный преобразователь фактически будет нечувствительным без вращения двигателя и получения его параметров (например, числа оборотов в минуту (Revolutions Per Minute, RPM) и мощности (в лошадиных силах, л.с.)) в качестве входных сигналов, имеющихся для преобразования в других случаях. Не будет никакого другого значения давления или расхода, кроме нуля, которое может быть преобразовано, если двигатель останавливается. Обнаружение отсутствия потока, основанное на падении давления в системе относительно минимального давления насоса, обычной схемой остановки при обнаружении отсутствия потока (No Flow Shutdown, NFSD) поэтому недостижимо, если не вводятся никакие дополнительные условия отсутствия потока или режимы работы насоса.
В насосной промышленности есть потребность в лучшем способе для определения обнаружения отсутствия потока для применений бессенсорного управления насосом.
Сущность изобретения
Данное изобретение предлагает новые и уникальные средства или способы обнаружения отсутствия потока, использующие условия обнаружения и схемы режимов работы насоса именно для применений бессенсорного управления насосом, чтобы экономить энергию работы насоса, когда имеется требование отсутствия потока в насосной системе. Вместе с принципом обычной NFSD, например, согласно описанному выше, введение схемы обнаружения отсутствия потока на холостом ходу позволяет сделать режимы перекачки с отсутствием потока, включающие как остановку при отсутствии потока, так и работу на холостом ходу при отсутствии потока, осуществимыми для применений бессенсорного управления насосом. Согласно данному изобретению основные параметры управления для условий отсутствия потока могут включать не только жидкостные параметры насоса, такие как расход, давление или положения (или коэффициенты) системы, но могут включать также и параметры работы двигателя, такие как мощность, ток или вращающий момент, соответственно. Кроме того, согласно данному изобретению вводятся несколько альтернативных схем с комбинацией бессенсорных и внешних сигналов расхода или давления, а также, например, с использованием сигналов реле потока, сигналов расхода в зоне или датчика давления, как изложено здесь.
Частные формы осуществления изобретения
Для примера, данное изобретение предлагает новую и уникальную технологию для применения бессенсорного управления насосом.
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму способа или устройства, например, в применениях или системах управления жидкостной перекачкой, имеющих процессор или модуль обработки сигналов, сконфигурированный для:
приема сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса; и
определения, основанного на принятой сигнализации, соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI.
Согласно некоторым формам осуществления данное изобретение может включать одну или несколько из следующих особенностей:
Процессор или модуль обработки сигналов может быть сконфигурирован так, чтобы обеспечивать соответствующую сигнализацию, содержащую информацию о том, должен ли насос остаться в режиме NFSD или в режиме NFI.
Процессор или модуль обработки сигналов может быть сконфигурирован для определения соответствующей сигнализации, полагая расход системы Q* при частоте вращения холостого хода насоса nidle в качестве основного параметра обнаружения отсутствия потока, при условии отсутствия потока, заданном согласно уравнению:

где порог расхода определяется как Qthr для периода времени контроля ТР.
Процессор или модуль обработки сигналов может быть сконфигурирован для определения, является ли расход системы Q*, который требуется при частоте вращения холостого хода насоса, меньшим, чем порог расхода Qthr для периода времени контроля ТР, и определения, что условие NFSD выполняется, и управление может остаться в режиме NFSD или режиме NFI, следуя схемам NFSD/NSI, и при этом флаг NFSD остается поднятым; или в ином случае, возвращения насоса к его нормальной работе, если поток обнаружен в системе согласно уравнению: Qthr≤Q* с t≥ТР.
Процессор или модуль обработки сигналов может быть сконфигурирован для определения соответствующей сигнализации, полагая давление в системе Р* при частоте вращения холостого хода nidle насоса в качестве параметра отсутствия потока, при условии отсутствия потока, заданном согласно уравнению:

где H0 - давление на холостом ходу, (H0-db) - падение давления относительно давления на холостом ходу, и ТР - период времени контроля.
Процессор или модуль обработки сигналов может быть сконфигурирован для определения, является ли давление в системе Р* при частоте вращения холостого хода меньшим, чем давление на холостом ходу H0 и большим, чем падение давления относительно давления на холостом ходу (H0-db) в течение периода времени контроля ТР, и определения, если выполняется условие NFSD, что управление может остаться в режиме NFSD или режиме NFI, следуя схемам NFSD/NSI, при этом флаг NFSD остается поднятым; или в ином случае, возвращения насоса к его нормальной работе, если поток обнаружен в системе при условии отсутствия потока, заданном согласно уравнению: Р*≤(H0-db) с t≥ТР.
Процессор или модуль обработки сигналов может быть сконфигурирован для определения соответствующей сигнализации, полагая мгновенный коэффициент сопротивления системы Cv при частоте вращения холостого хода nidle насоса в качестве параметра отсутствия потока, также при условии отсутствия потока согласно уравнению:

где Сv-thr - порог коэффициента сопротивления системы, и ТР - период времени контроля.
Процессор или модуль обработки сигналов может быть сконфигурирован для определения, является ли мгновенный коэффициент сопротивления системы Cv при минимальной частоте вращения нулевым или меньшим чем порог коэффициента сопротивления системы Cv-thr для периода времени контроля ТР, и определения, выполняется ли условие NFSD, и при этом флаг NFSD затем соответственно поднимается; или в ином случае, возвращения насоса к его нормальной работе, если поток обнаружен в системе при условии наличия потока согласно уравнению:  с t≥ТР.
с t≥ТР.
Процессор или модуль обработки сигналов может быть сконфигурирован для определения соответствующей сигнализации, полагая мощность двигателя w* при частоте вращения холостого хода насоса nidle в качестве параметра отсутствия потока, также при условии отсутствия потока согласно уравнению:

где w* - мощность двигателя, wthr - порог мощности и ТР - период времени контроля.
Процессор или модуль обработки сигналов может быть сконфигурирован для определения, является ли мощность двигателя w* при частоте вращения холостого хода меньшей, чем порог мощности wthr в течение периода времени контроля ТР, и определения, выполняется ли условие NFSD, и тогда соответственно поднимать флаг NFSD; или в ином случае, возвращать насос к его нормальной работе, если поток обнаружен в системе, при условии наличия потока согласно уравнению: wthr≤w* с t≥Тр.
Соответствующая сигнализация может использоваться как сигнализация управления в системе управления жидкостной перекачкой в динамической системе жидкостной перекачки.
Для примера, процессор или модуль обработки сигналов может содержать или представлять собой по меньшей мере один процессор обработки сигналов и по меньшей мере одно запоминающее устройство, содержащее код компьютерной программы, и при этом по меньшей мере одно запоминающее устройство и код компьютерной программы могут быть сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обработки сигналов заставлять процессор обработки сигналов по меньшей мере принимать сигнализацию (или, например, связанную сигнализацию) и определять соответствующую сигнализацию, основанную на принятой сигнализации. Процессор или модуль обработки сигналов может быть сконфигурирован с соответствующим кодом компьютерной программы, чтобы осуществлять соответствующие алгоритмы обработки сигналов и/или функции, соответствующие сформулированным здесь.
Согласно некоторым формам осуществления данное изобретение может представлять собой способ, включающий шаги для:
приема процессором или модулем обработки сигналов сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса; и
определения на основании принятой сигнализации процессором или модулем обработки сигналов соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI.
Способ может также включать один или больше признаков, изложенных здесь, включая подачу от процессора или модуля обработки сигналов соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме NFSD или в режиме NFI, которая, например, может использоваться для управления клапаном в динамической жидкостной насосной системе.
Данное изобретение может также представлять собой, например, программное изделие для компьютера, имеющего машиночитаемый носитель с компьютерным выполнимым кодом, помещенным на нем, чтобы осуществлять способ, например, когда он выполняется на устройстве обработки сигналов, которое формирует часть такого контроллера насоса или клапана. В качестве примера, программное изделие для компьютера может, например, принимать форму компакт-диска, гибкого диска, флэш-накопителя, флэш-карты, а также других типов или видов запоминающих устройств, которые могут хранить такой выполнимый компьютером код на таком машиночитаемом носителе, известным в настоящее время или разработанным в будущем.
Заявка, рассматриваемая в данный момент, предлагает новую технологию, которая является дальнейшим развитием и основывается на вышеупомянутом семействе технологий, излагаемых здесь.
Краткое описание чертежей
Чертежи содержат следующие фигуры, которые не обязательно начерчены в масштабе:
Фиг. 1 представляет собой схему известного бессенсорного преобразователя для получения мгновенного перепада давления на насосе и расхода на основании рабочей мощности двигателя и значения скорости согласно некоторым формам осуществления данного изобретения.
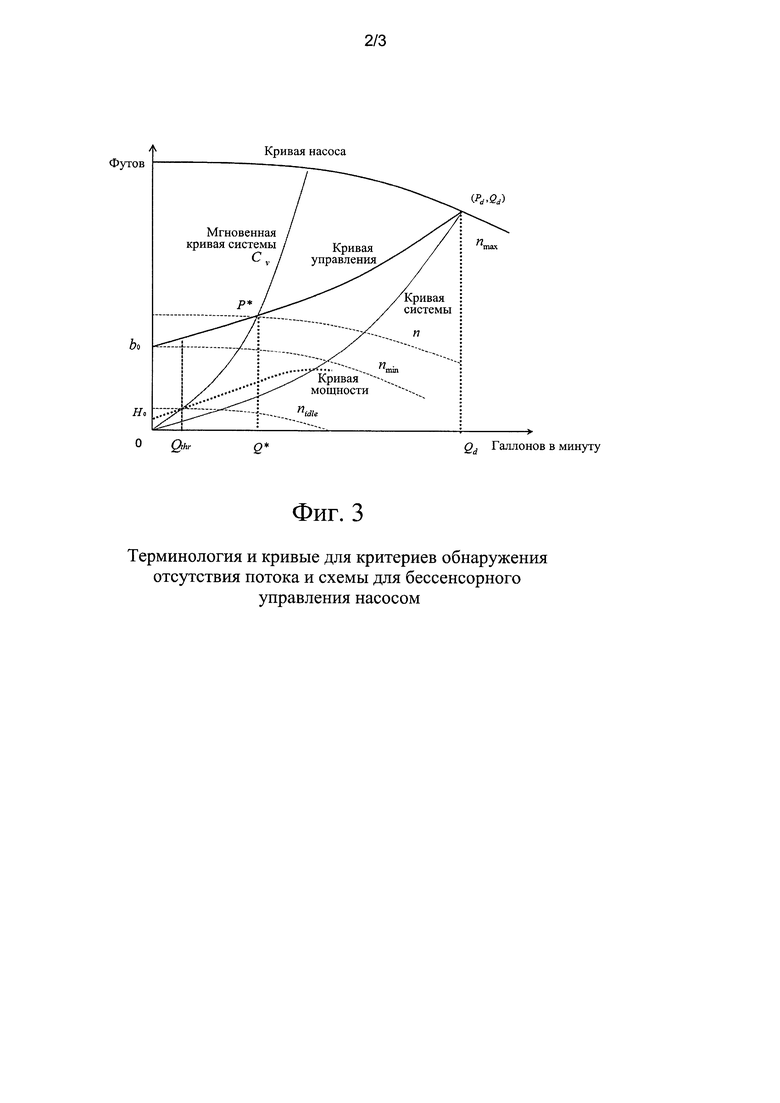
Фиг. 2 представляет собой блок-схему устройства, например, имеющего процессор или модуль обработки сигналов, сконфигурированный для осуществления функций обработки сигналов согласно некоторым формам осуществления данного изобретения.
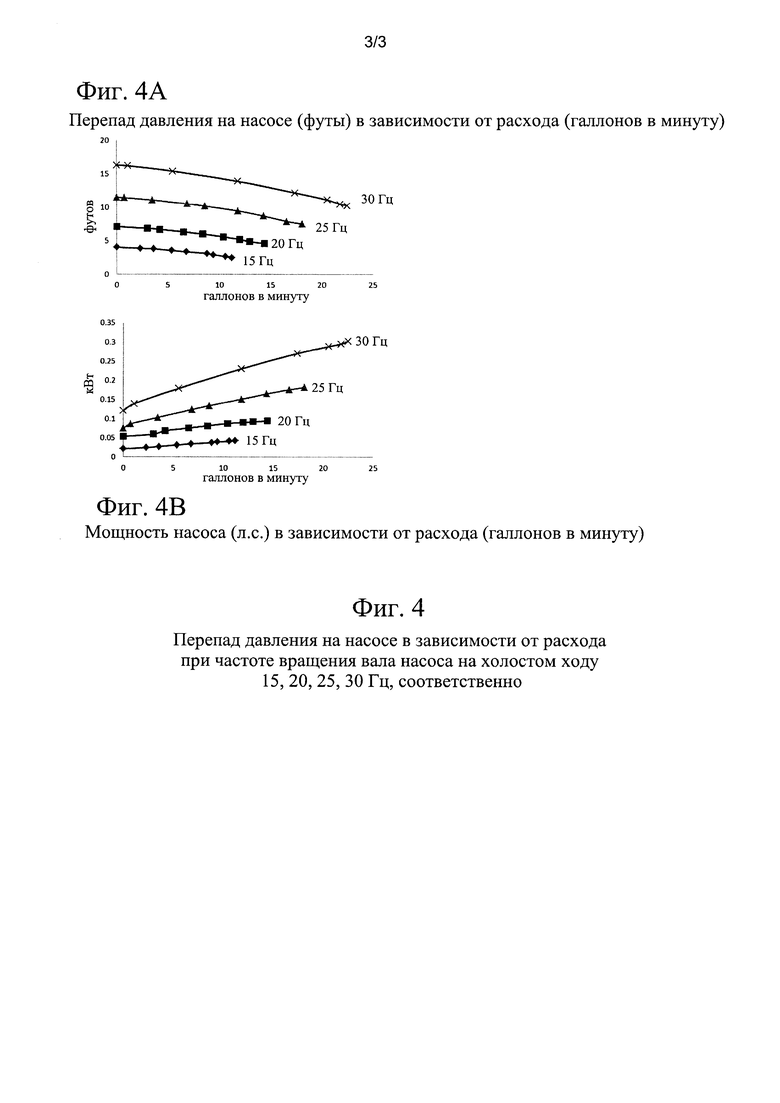
Фиг. 3 представляет собой график, показывающий терминологию и кривые для критериев обнаружения отсутствия потока и схемы для бессенсорного управления насосом согласно реализациям некоторых форм осуществления данного изобретения.
Фиг. 4 содержит графики перепада давления на насосе и мощности в зависимости от расхода, измеренного при частоте вращения холостого хода насоса 15, 20, 25 и 30 Гц соответственно, где фиг. 4В - график перепада давления на насосе (футы) в зависимости от расхода (галлонов в минуту), и где фиг. 4В - график мощности насоса (л.с.) в зависимости от расхода (галлонов в минуту).
Подробное описание изобретения
Фиг. 2: Реализация функциональных возможностей обработки сигналов
В качестве примера на фиг. 2 показано устройство 10 согласно некоторым формам осуществления данного изобретения, например, имеющее процессор или модуль 10а обработки сигналов, сконфигурированный по меньшей мере для:
приема сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса; и
определения соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI, основанной на принятой сигнализации.
Во время работы процессор или модуль обработки может быть сконфигурирован так, чтобы обеспечивать соответствующую сигнализацию, содержащую информацию о том, должен ли насос остаться в режиме NFSD или в режиме NFI. Соответствующая сигнализация может содержать информацию, используемую для управления жидкостной системой перекачки.
Процессор или модуль 10а обработки сигналов может быть сконфигурирован в насосе и/или устройстве управления насосом, или составлять его часть, например, который может содержать или может быть реализовано совместно с устройством управления насосом или контроллер, сконфигурированный в нем. В качестве примера предусматриваются формы осуществления, в которых устройство является насосом, имеющим процессор или модуль 10а обработки сигналов, и предусматриваются формы осуществления, в которых устройство является устройством управления насосом или контроллером, имеющим процессор или модуль 10а обработки сигналов.
Как будет понятно специалистам в данной области техники, данное изобретение может быть реализовано с использованием характеристик системы и связанных с ними уравнений, например, описанным здесь, а также с использованием других типов или видов характеристик системы и связанных с ними уравнений, которые известны теперь или будут разработаны в будущем.
В качестве примера, функции устройства 10 могут быть реализованы с использованием аппаратных средств, программного обеспечения, встроенного программного обеспечения или их комбинации. В типичной программной реализации устройство 10 будет содержать одну или несколько архитектур на базе микропроцессора, содержащих, например, по меньшей мере один процессор или микропроцессор обработки сигналов, подобный элементу 10а. Специалист в данной области техники сможет запрограммировать такую реализацию на базе микроконтроллера или микропроцессора для выполнения функций, описанных здесь, без лишнего экспериментального исследования. Например, процессор или модуль 10а обработки сигналов может быть сконфигурирован, например, специалистом в данной область техники без чрезмерного экспериментирования так, чтобы принимать сигнализацию, содержащую информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса, согласно описанному здесь.
Кроме того, процессор или модуль 10а обработки сигналов может быть сконфигурирован, например, специалистом в данной области техники без чрезмерного экспериментирования так, чтобы определять соответствующую сигнализацию, содержащую информацию о том, должен ли насос остаться в режиме NFSD или в режиме NFI, согласно описанному в данном документе.
Объем изобретения не ограничен какой-либо конкретной реализацией, использующей технику, либо уже известную, либо разработанную в будущем. Объем изобретения включает реализацию функций процессоров 10а в виде автономного процессора или модуля процессора, в виде отдельного процессора или модулей процессора, а также некоторой их комбинации.
Устройство 10 также может содержать, например, другие схемы или компоненты 10b процессора сигналов, включая оперативное запоминающее устройство (Random Access Memory, RAM)) и/или постоянное запоминающее устройство (Read Only Memory, ROM), устройства ввода-вывода и управления, и шины данных и адресные шины, соединяющие их, и/или по меньшей мере один входной процессор и по меньшей мере один выходной процессор, например, что будет понятно специалистам в данной области техники.
Фиг. 3-4: Подробности реализации
Введение
Одна осуществимая схема обнаружение отсутствия потока для приложения бессенсорного управления насосом может быть реализована при наличии двигателя, сначала работающего и работающего с достаточно низкой скоростью при выполнении обнаружения отсутствия потока. Этот режим работы насоса с низкой скоростью, вводимый специально для обнаружения отсутствия потока для применений бессенсорного управления, может быть назван режимом NFI насоса. Скорость, связанная с режимом NFI насоса, может упоминаться или называться частотой вращения холостого хода насоса, соответственно. Данное изобретение в качестве средства обнаружения отсутствия потока для бессенсорного управления насосом может включать детектор отсутствия потока с его условиями обнаружение отсутствия потока и схемы режимов работы насоса, которые раскрыты здесь, для применений бессенсорного управления насосом, чтобы экономить энергию работы насоса, когда нет никакого запроса потока в системе. Вместе с условиями NFSD и работой на минимальной скорости вращения насоса в режиме нормальной эксплуатации насоса введение NFI насоса с дополнительными условиями обнаружения отсутствия потока при частоте вращения холостого хода насоса делает работу насоса с остановкой по отсутствию потока выполнимой специально для бессенсорного управления насосом.
Для применений отопления и охлаждения замкнутого цикла может быть полезно определять время бездействия остановленного насоса, чтобы включать/выключать насос в режим NFI и осуществить обнаружение наличия или отсутствия потока, соответственно, после чего может быть прослеживаемый период времени для изменения температуры воды до определенного градуса. Для открытой системы повышения давления, однако, может быть необходимо немедленное реагирование на поток в системе. Для этого, согласно некоторым формам осуществления изобретения, также может быть необходим внешний сигнал о расходе или давлении для практических бессенсорных применений NFSD. Соответственно вводятся несколько альтернативных схем с комбинацией бессенсорного и внешнего сигнала расхода или давления, используя реле потока, сигналы расхода в зоне или датчик давления.
Критерии остановки по отсутствию потока и схемы бессенсорного управления
На фиг. 3 показана кривая управления (contr. curve), определяемая как кривая уставки давления насоса для регулирования давления насоса; показана мгновенная кривая системы Cv, начерченная на основании кривой характеристик эквивалентной системы в некоторый момент времени, определяемый уравнением потока системы, включая кривую системы, рассчитанную традиционно при максимальной скорости насоса; и показана кривая насоса (Pump. curve) как кривая характеристик перепада давления на насосе в зависимости от расхода при скорости вращения, скажем, мгновенной скорости вращения n, предельной скорости вращения nmax и минимальной скорости вращения nmin, соответственно. В качестве примера, в данной заявке на патент режим насоса при частоте вращения холостого хода nidle, и очень низкой частоте вращения двигателя приблизительно 5-15 Гц, может быть введен как режим холостой работы насоса, при котором обнаружение отсутствия потока для бессенсорного управления может быть достижимо. Зависимость значений мощности от расхода, связанного с кривой насоса, называется и вычерчивается как соответствующая кривая мощности.
Для обнаружения отсутствия потока некоторые параметры, такие как давления и расходы, а также их соответствующие пороги, были определены и показаны на фиг. 3, где параметр Q* - расход, который требует система, и параметр Р* - уставка давления, соответствующая требуемой подаче при требуемом расходе Q*. Они могут быть получены от бессенсорного преобразователя или рассчитаны, также как требуемый расход, адаптивным способом, который раскрыт в материалах, обозначенных [1]-[7] ниже. Расход системы Q* может быть рекомендован для выбора в качестве основного параметра обнаружения отсутствия потока, так как сигнал расхода может быть получен прямо от бессенсорного преобразователя. Соответствующие пороги Qthr тогда могут быть введены для условия обнаружения отсутствия потока.
Если давление выбирается в качестве основного параметра управления, точно так же, как при обычном NFSD, падение давления в системе db относительно минимального давления b0 может использоваться для обнаружения отсутствия потока в системе при минимальной скорости вращения насоса в состоянии его нормальной работы. Давление на холостом ходу H0 также может вводиться для обнаружения отсутствия потока в системе в режиме NFI насоса специально для бессенсорных применений. Снова, падение давления относительно давления на холостом ходу может использоваться как условие обнаружения отсутствия потока.
Кроме того, показания мощности, тока или вращающего момента двигателя А*, Т* и w* от привода также могут использоваться как один или несколько параметров управления для обнаружения отсутствия потока. На основе терминов и параметров, определенных здесь, критерии и схемы обнаружения отсутствия потока могут быть детализированы, как изложено ниже.
1) Схемы остановки по отсутствию потока и/или холостого хода при отсутствии потока
Обнаружение отсутствия потока может выполняться непрерывно при минимальной скорости вращения двигателя в режиме нормальной эксплуатации насоса. Если в состоянии системы обнаружено отсутствие потока, то тогда насос может быть вынужден перейти или в режим NFSD или в режим NFI. В любых режимах при условии отсутствия потока устройство управления или контроллер должны вернуть насос в его режим холостого хода и осуществить обнаружение наличия или отсутствия потока при его частоте вращения холостого хода, соответственно указанному далее. Насос затем может быть разогнан снова до его нормальной работы, если в системе обнаружен поток. В ином случае он может остаться в режиме NFI или возвратиться в режим NFSD. Несколько схем обнаружения наличия или отсутствия потока и режимов работы насоса могут использоваться и соответственно подробно описываются ниже.
1.1) Схема обнаружения отсутствия потока при остановке/на холостом ходу
Во-первых, обнаружение отсутствия потока может вводиться или выполняться непрерывно при минимальной скорости в режиме нормальной эксплуатации насоса. Если отсутствие потока в состоянии системы обнаруживается детектором, то тогда насос может быть переведен в режим NFSD. После остановки на период времени, определяемый как время бездействия насоса Ts в режиме NFSD, устройство управления или контроллер может перевести или переключить насос в режим NFI и осуществить обнаружение наличия или отсутствия потока, соответственно. Если поток обнаружен в таком состоянии системы, то тогда насоса может быть разогнан обратно до его нормальной работы. В ином случае, если в системе имеется отсутствие потока, насос вернется к его состоянию NFSD для того, чтобы снова бездействовать.
1.2) Схема обнаружения отсутствия потока на холостом ходу
Точно так же обнаружение отсутствия потока может выполняться непрерывно при минимальной скорости в режиме нормальной эксплуатации насоса. Если в состоянии системы обнаружено отсутствие потока, то тогда насос может быть переведен в режим NFI, в котором насос непрерывно выполняет подпрограмму обнаружения наличия или отсутствия потока. Если в состоянии системы обнаружен поток, то тогда насос может быть разогнан обратно до его нормальной работы. В ином случае он останется в его режиме NFI до обнаружения потока в системе.
1.3) Схема обнаружения отсутствия потока при остановке/на холостом ходу с внешним сигналом потока
Начальный внешний сигнал потока, например, там, где сигнал потока от бессенсорного преобразователя в зоне для жидкостной системы с замкнутым контуром (см. источник [7] ниже) или от реле потока для жидкостной системы повышения давления с замкнутым контуром или также с разомкнутым контуром, может вводиться, чтобы выполнять начальное обнаружение потока в системе. После получения начального внешнего сигнала потока, устройство управления или контроллер может перевести или переключить насос в режим NFI и осуществлять обнаружение наличия или отсутствия потока для дальнейшего подтверждения, если оно установлено. Тогда после подтверждения потока в системе в режиме NFI насос может быть разогнан обратно до его нормальной работы. В ином случае он будет переведен или переключен обратно в его состояние NFSD для бездействия.
Согласно некоторым формам осуществления данное изобретение может быть реализовано с реле потока, имеющими электромагнитное реле или фоторезистор, чтобы обнаруживать вращательное движение вала насоса для предсказания потока в системе.
1.4) Схема обнаружения отсутствия потока при остановке/на холостом ходу с внешним сигналом давления
Начальный внешний сигнал давления, например, там, где сигнал давления поступает от датчика давления на всасывании насоса для замкнутой или разомкнутой жидкостной системы, также может вводиться, чтобы выполнять начальное обнаружение потока в системе, используя обычный критерий обнаружения давления. После начального обнаружения потока в состоянии системы устройство управления или контроллер может перевести или переключить насос в режим NFI и осуществить обнаружение наличия или отсутствия потока для дальнейшего подтверждения, если требуется. Насос может быть разогнан обратно до его нормальной работы после того как поток в состоянии системы подтверждается в режиме NFI. В ином случае насос вернется в его состояние NFSD для бездействия. Комбинация бессенсорного преобразователя насоса, выдающего перепад давления на насосе, и внешнего датчика давления всасывания может сделать энергосберегающее управление выполнимым в открытой жидкостной системе, см. например, источники [3]-[7].
2) Критерии обнаружения отсутствия потока на минимальной скорости вращения насоса
Критерии обнаружения отсутствия потока на минимальной скорости вращения двигателя в режиме нормальной эксплуатации насоса являются условиями отсутствия потока, при которых устройство управления может перевести насос в режим NFSD или режим NFI, например, следуя одной из двух схем NFSD/NSI, раскрытых здесь, чтобы экономить энергию работы насоса. Здесь описываются несколько критериев обнаружения отсутствия потока на минимальной скорости вращения насоса для бессенсорного управления насосом, включая следующие:
2.1) Расход системы
Расход системы на минимальной скорости вращения насоса nmin может быть принят в качестве основного параметра обнаружения отсутствия потока, при условии отсутствия потока согласно уравнению (2.1) следующим образом:

Уравнение (2.1) устанавливает, что, если расход системы Q*, который требуется на минимальной скорости вращения насоса, меньше чем порог расхода, определяемый как Qthr за период времени контроля ТР, то условие NFSD выполняется и при этом флаг NFSD тогда соответственно поднимается. Здесь расход системы Q* может быть получен прямо от бессенсорного преобразователя или рассчитан как требуемый расход адаптивным способом.
2.2) Давление в системе
Давление в системе на минимальной скорости nmin насоса также может быть принято в качестве параметра отсутствия потока при условии, точно так же как обычный критерий давления NFSD для условия отсутствия потока, согласно уравнению (2.2) следующим образом:

Уравнение (2.2) устанавливает, что, если давление в системе Р* на минимальной скорости меньше чем минимальное давление b0 и больше чем падение давления (b0-db) относительно минимального давления за период времени контроля ТР, то условие NFSD выполняется и при этом флаг NFSD тогда соответственно поднимается. Здесь сигнал давления в системе Р* может быть получен прямо от бессенсорного преобразователя или рассчитан как адаптивная уставка давления адаптивным способом.
2.3) Коэффициент сопротивления системы
Точно так же, мгновенный коэффициент сопротивления системы на минимальной скорости nmin насоса может быть принят в качестве параметра отсутствия потока, также при условии отсутствия потока согласно уравнению (2.3) следующим образом:

Уравнение (2.3) устанавливает, что, если мгновенный коэффициент сопротивления системы на минимальной скорости стремится к нулю или меньше чем порог коэффициента сопротивления системы Cv-thr за период времени контроля ТР, то условие NFSD выполняется и флаг NFSD тогда соответственно поднимается. Здесь коэффициент сопротивления системы  может быть получен прямо от бессенсорного преобразователя или рассчитан согласно уравнению потока
может быть получен прямо от бессенсорного преобразователя или рассчитан согласно уравнению потока  .
.
2.4) Мощность, ток или вращающий момент двигателя
Мощность двигателя на минимальной скорости насоса nmin может быть прямо принята в качестве параметра отсутствия потока, при условии отсутствия потока, заданном согласно уравнению (2.4) следующим образом:

Уравнение (2.4) устанавливает, что, если мощность двигателя w* на минимальной скорости меньше чем порог мощности wthr за период времени контроля ТР, то условие NFSD выполняется, и флаг NFSD тогда соответственно поднимается. Здесь сигнал мощности двигателя w* может быть получен прямо из показаний привода двигателя.
Точно так же, другие параметры двигателя, такие как ток или вращающий момент двигателя из показаний привода двигателя, могут быть приняты как критерий обнаружения отсутствия потока, также согласно уравнению (2.5) или (2.6) следующим образом:

или

Здесь сигналы тока и вращающего момента двигателя А* и T* могут быть получены прямо из показаний привода двигателя и Athr и Тthr - их соответствующие заданные пороги.
3) Критерии обнаружения отсутствия потока на холостом ходу насоса
Критерии обнаружения отсутствия потока при частоте вращения двигателя на холостом ходу в режиме холостого хода насоса являются условиями отсутствия потока, при которых устройство управления или контроллер могут возвратить насос к его нормальной работе, если поток обнаружен в системе, или обратно в режим NFSD или режим NFI в ином случае, следуя одной из схем NFSD/NFI, раскрытых здесь, чтобы экономить энергию работы насоса. Несколько критериев отсутствия потока в режиме холостого хода насоса для управления насосом с бессенсорным управлением подачей предлагаются в этой работе, включая:
3.1) Расход системы
Расход системы при частоте вращения на холостом ходу насоса nidle может быть принят в качестве основного параметра обнаружения отсутствия потока, при условии отсутствия потока, заданном согласно уравнению (3.1) следующим образом:

Уравнение (3.1) устанавливает, что если расход системы Q*, который требуется при частоте вращения холостого хода насоса, меньше чем порог расхода, определяемый как Qthr за период времени контроля ТР, то условие NFSD выполняется, и устройство управления может остаться в режиме NFSD или режиме NFI, следуя любой из схем NFSD/NSI, раскрытых здесь, при этом флаг NFSD остается поднятым. В ином случае устройство управления или контроллер возвратит насос к его нормальной работе, если поток обнаружен в системе, то есть, Qthr≤Q* c t≥ТР.
Снова сигнал расхода системы Q* может быть получен прямо от бессенсорного преобразователя или рассчитан как требуемый расход адаптивным способом.
3.2) Давление в системе
Давление в системе при частоте вращения холостого хода nidle насоса может быть принято в качестве параметра отсутствия потока, при условии отсутствия потока, заданном согласно уравнению (3.2) следующим образом:

Уравнение (3.2) устанавливает, что, если давление в системе Р* при частоте вращения холостого хода меньше чем давление на холостом ходу H0 и больше чем падение давления относительно давления на холостом ходу (H0-db) за период времени контроля ТР, то условие NFSD выполняется, и управление может остаться в режиме NFSD или режиме NFI, следуя любой из схем NFSD/NSI, раскрытых здесь, при этом флаг NFSD остается поднятым. В ином случае, устройство управление или контроллер переведет или переключит насос обратно к его нормальной работе, если поток обнаружен в системе, при выполнении условия наличия потока, то есть, Р*≤(H0-db) с t≥ТР. Здесь сигнал давления в системе Р* может быть получен прямо от бессенсорного преобразователя или рассчитан как адаптивная уставка давления адаптивным способом.
3.3) Коэффициент сопротивления системы
Точно так же, мгновенный коэффициент сопротивления системы при частоте вращения холостого хода насоса nidle может быть принят в качестве параметра отсутствия потока, также при условии отсутствия потока, заданном согласно уравнению (3.3) следующим образом:

Уравнение (3.3) устанавливает, что, если мгновенный коэффициент сопротивления системы на минимальной скорости стремится к нулю или меньше чем порог коэффициента сопротивления системы Cv-thr за период времени контроля ТР, то условие NFSD выполняется, при этом флаг NFSD соответственно поднимается. В ином случае управление или контроллер переведут или переключат насос обратно к его нормальной работе, если поток обнаружен в системе, при выполнении условия наличия потока, то есть,  с t≥ТР. Здесь коэффициент сопротивления системы
с t≥ТР. Здесь коэффициент сопротивления системы  может быть получен прямо от бессенсорного преобразователя или рассчитан согласно уравнению потока
может быть получен прямо от бессенсорного преобразователя или рассчитан согласно уравнению потока  .
.
3.4) Мощность, ток или вращающий момент двигателя
Мощность двигателя при частоте вращения холостого хода насоса nidle может быть принята в качестве параметра отсутствия потока, также при условии отсутствия потока, заданном согласно уравнению (3.4) следующим образом:

Уравнение (3.4) устанавливает, что, если мощность двигателя w* при частоте вращения холостого хода меньше чем порог wthr мощности за период времени контроля ТР, то условие NFSD выполняется, при этом флаг NFSD соответственно поднимается. В ином случае устройство управления или контроллер переведет или переключит насос обратно к его нормальной работе, если поток обнаружен в системе, при выполнении условия наличия потока, то есть, wthr≤w* с t≥ТР. Снова сигнал мощности двигателя w* может быть получен прямо из показаний привода двигателя.
Точно так же, другие параметры двигателя, такие как ток или вращающий момент двигателя из показаний привода двигателя, могут быть приняты как критерий обнаружения отсутствия потока, также согласно уравнению (3.5) или (3.6) следующим образом:

или

Здесь сигналы тока и вращающего момента двигателя А* и Т* могут быть получены прямо из показаний привода двигателя.
Параметры двигателя как критерии обнаружения отсутствия потока в уравнениях (2.4)-(2.6) и (3.4)-(3.6) могут обеспечить простой способ оценить условие отсутствия потока. Они, поэтому, более предпочтительно, должны использоваться для применений бессенсорного управления насосом, если могут быть получены от привода. С другой стороны, очевидно, что сигнал расхода от бессенсорного преобразователя может выдать более прямую индикацию наличия или отсутствие потока в системе. Соответствующие критерии в уравнениях (2.1) и (3.1) также могут быть предпочтительны для использования. Тот же самый аргумент при расходе может быть расширен на критерии коэффициента сопротивления системы в уравнениях 2.3 и 3.3, соответственно. Однако давление, как условия отсутствия потока в уравнениях (2.2) и (3.2), может не быть столь же чувствительно, как датчик давления для обычного NFSD, особенно для насоса с несколько уплощенной кривой насоса, так как для бессенсорного применения падение давления может быть оценено только по кривой насоса с насосом, работающим на холостом ходу. Заметим, что критерии обнаружения отсутствия потока, раскрытые здесь, могут использоваться как отдельное условие или как комбинируемое условие для обнаружения отсутствия потока в состояниях NFSD и NFI, если необходимо. Кроме того с рассмотрением применения с разомкнутым контуром со схемой обнаружения потока, связанной с разделом 1.3, представленным выше, параметры управления, такие как поток, мощность и т.д., могут быть приняты как основные переменные управления, соответственно. Для этого алгоритмы энергосберегающего управления, раскрытые в источниках [3]-[7], могут продолжать эффективно использоваться для экономии энергии перекачки или мощности, обеспечиваемой приводными двигателями, на основании расхода, получаемого бессенсорным преобразователем, при игнорировании части вклада расхода, например, из-за давления водоснабжения муниципального образования (например, населенного пункта, города или штата). В случае если этот вклад расхода из-за давления водоснабжения муниципального образования может также потребоваться учесть в энергосберегающем управлении, схема обнаружения потока, связанная с разделом 1.4, может быть введена, соответственно.
Перепад давления на насосе, расход, преобразованные преобразователем по методу оптимального приближения вместе с законами подобия, раскрытого ниже, и их соответствующая мощность двигателя, измеренная относительно частоты вращения холостого хода насоса 15, 20, 25 и 30 Гц, были собраны от известного центробежного насоса и соответственно начерчены на фиг. 4.
Для показанных на фиг. 4 данных бессенсорной модели на основе метода оптимального приближения, вместе с законами подобия, расход 5 галлонов в минуту (0,315 дм3/с) или соответствующее ему значение мощности 29 Вт могут быть выбраны в качестве порога условия отсутствия потока при заданной частоте вращения холостого хода, скажем, 15 Гц. Для этого условие отсутствия потока может быть определено с помощью уравнения (3.1) для расхода, уравнения (3.4) для мощности или других уравнений, соответственно. Для дискретного бессенсорного преобразователя сначала может потребоваться предоставить или рассчитать данные при заданной частоте вращения холостого хода так, чтобы соответствующий порог мог быть определен для выполнения условий обнаружения NFI.
Различные элементы новизны
Данное изобретение может также включать или принимать форму одной или нескольких из следующих различных форм осуществления:
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму реализаций, где средство обнаружения отсутствия потока при остановке или отсутствия потока при холостом ходе для бессенсорного управления насосом включают детектор отсутствия потока с условиями обнаружения отсутствия потока и схемами режимов работы насоса, предложенные для применений бессенсорного управления насосом, чтобы экономить энергию работы насоса, когда в системе есть требование отсутствия потока. Вместе с условиями остановки по отсутствию потока (NFSD) и работе на минимальной скорости вращения насоса в режиме нормальной эксплуатации насоса, введение режима холостого хода насоса при отсутствии потока (NFI) с дополнительными условиями обнаружения отсутствия потока при частоте вращения холостого хода насоса делает остановку по отсутствию потока или работу на холостом ходу насоса при отсутствии потока выполнимыми специально для бессенсорного управления насосом.
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму реализаций, где средства обнаружения отсутствия потока, упомянутые выше, содержат схему остановки по отсутствию потока и/или холостого хода при отсутствии потока, имеющую функциональные возможности подобные схематично показанным на фиг. 3, как изложено ниже. Сначала обнаружение отсутствия потока может выполняться непрерывно на минимальной скорости в режиме нормальной эксплуатации насоса. Если отсутствие потока в системе обнаруживается детектором, то насос затем может быть переведен на работу в режиме NFSD. После остановки на время, например, определяемое как время бездействия насоса Ts в режиме NFSD, затем устройство управления может перевести насос в режим NFI и осуществлять обнаружение отсутствия потока, соответственно. Если поток в системе обнаружен, насос может быть разогнан обратно до его нормальной работы. В ином случае он снова вернется к его состоянию NFSD для бездействия.
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму реализации, где средство обнаружения отсутствия потока, упомянутое выше, может не включать никакую схему обнаружения отсутствия потока при остановке и/или на холостом ходу, имеющую функциональные возможности, подобные схематично показанным на фиг. 3, как изложено ниже. Точно так же, обнаружение отсутствия потока может выполняться непрерывно при минимальной скорости в режиме нормальной эксплуатации насоса. Если отсутствие потока в системе обнаружено, то насос может быть переведен на работу в режиме NFI. При работе в режиме NFI обнаружение отсутствия потока в системе может выполняться непрерывно. Если поток в системе обнаружен, тогда насос может быть разогнан обратно до его нормальной работы. В ином случае он останется в его режиме NFI до обнаружения потока в системе.
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму реализации, где упомянутое выше средство обнаружения отсутствия потока содержит также внешний сигнал расхода для бессенсорных применений NFSD. С использованием внешнего сигнала расхода, то есть, сигналов расхода от бессенсорных преобразователей в зонах для жидкостной системы с замкнутым контуром или от реле физического потока для жидкостной системы с замкнутым или разомкнутым контуром, поток во вторичной системе также может оцениваться и обнаруживаться. После получения внешнего сигнала расхода устройство управления может переводить вторичный насос в режим NFI и осуществлять обнаружение наличия или отсутствия потока, соответственно. Затем насос может быть разогнан обратно до его нормальной работы, после подтверждения наличия потока в системе в режиме NFI. В ином случае он вернется к его состоянию NFSD для бездействия. В качестве дальнейшего примера, предпочтительная версия реле потока может использовать электромагнитное реле или фоторезисторное реле, чтобы обнаруживать вращательное движение вала насоса для предсказания начального состояния потока.
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму реализации, где упомянутое выше средство обнаружения отсутствия потока включает внешний сигнал давления от датчика давления в секции всасывания насоса также для бессенсорных применений NFSD. С использованием внешнего сигнала давления при всасывании насоса для замкнутой или разомкнутой жидкостной системы, обычный критерий обнаружения давления может вводиться, чтобы выполнять начальное обнаружение потока в системе. После обнаружения потока в системе устройство управления может перевести насос в режим NFI и осуществить обнаружение наличия или отсутствия потока для дальнейшего подтверждения, если требуется. Тогда после подтверждения потока в системе в режиме NFI насос может быть разогнан обратно до его нормальной работы. В ином случае он вернется в его состояние NFSD для бездействия. Комбинация бессенсорного преобразователя насоса, выдающего перепад давления на насосе, и внешнего датчика давления всасывания может сделать энергосберегающее управление [3]-[7] выполнимым в разомкнутой жидкостной системе.
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму реализации, где условия и операции обнаружения отсутствия потока в упомянутом средстве обнаружения отсутствия потока включают одну или несколько комбинаций условий NFSD и операций при минимальной скорости вращения насоса в режиме нормальной эксплуатации насоса, как предложено выше в уравнениях (2.1)-(2.6), чтобы переводить или переключать, или обеспечивать соответствующую сигнализацию для управления или переключения насоса в режим NFSD или в режим NFI, после того, как выполнены условия. Далее, данное изобретение может включать также одну или несколько комбинаций условий и операций обнаружения NFI также в вышеприведенных уравнениях (3.1)-(3.6), чтобы выполнять обнаружение отсутствия потока при частоте вращения холостого хода насоса в его режиме NFI. Здесь соответствующими параметрами обнаружения отсутствия потока могут быть давление, расход, позиция системы (коэффициент сопротивления системы), а также параметры из показаний режима двигателя, такие как мощность, ток или вращающий момент и т.д. Параметры двигателя могут рассматриваться предпочтительно, так как они могут быть получены непосредственно от привода.
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму реализации, где упомянутое выше средство обнаружения отсутствия потока объединено с бессенсорным преобразователем специально для применений бессенсорного управления насосом. Оно может использоваться также в применениях управления жидкостной перекачкой с датчиками, если так сконфигурировано.
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму реализации, где жидкостная насосная система, имеющая упомянутые здесь средства обнаружения отсутствия потока, может включать все системы с замкнутым контуром или разомкнутым контуром, известные теперь или разработанные в будущем, например, такие как первичные насосные системы, вторичные насосные системы, оборотные системы водоснабжения и системы повышения давления. Упомянутые здесь системы также могут содержать одну зону или множество зон.
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму реализации, основанную на передаче управляющих сигналов или сигнализации с использованием технологии проводной связи, включая все обычные средства восприятия и передачи, которые известны теперь и используются в настоящее время, а также те, которые будут разработаны в будущем. Предполагается, что технологии беспроводной передачи сигналов могут быть оптимальными и удобными.
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму реализаций, основанных на использовании насосов, упомянутых выше для жидкостных систем нагрева или охлаждения, например, включающих одиночный насос, циркуляционный насос, группу параллельно соединенных насосов или циркуляционных насосов, группу последовательно соединенных насосов или циркуляционных насосов или их комбинации.
Согласно некоторым формам осуществления данное изобретение может включать или принимать форму реализаций, где средства регулирования расхода систем могут содержать клапаны с ручным или автоматическим управлением, циркуляционные насосы с ручным или автоматическим управлением или их комбинации.
Жидкостные характеристики и дискретные функции распределения
Методы определения жидкостных характеристик и методы вычерчивания распределения таких жидкостных характеристик, например, подобных тем, которые показаны на фиг. 3-4, также известны в данной области техники; и рамки изобретения не ограничены любым их конкретным типом или видом, который известен теперь или будет разработан позже в будущем.
Кроме того, специалисты в данной области техники будут способны осуществить основное изобретение без чрезмерного экспериментирования на основании раскрытого здесь, включая определение жидкостных характеристик и построения распределений таких жидкостных характеристик, подобных показанной здесь.
Другие родственные заявки
Данная заявка связана с другими заявками на патенты, которые формируют часть полного семейства технологий, разработанных здесь одним или несколькими изобретателями и раскрытых в следующих заявках:
[1] в заявке США с порядковым номером 12/982286 (документ поверенного №911-019.001-1//F-B&G-1001), зарегистрированный 30 декабря 2010 г. под названием "Method and apparatus for pump control using varying equivalent system characteristic curve, AKA an adaptive control curve", которая опубликована как патент США №8700221 15 апреля 2014 г; и
[2] в заявке США с порядковым номером 13/717086 (документ поверенного №911-019.004-2//F-B&G-X0001), зарегистрированной 17 декабря 2012 г. под названием "Dynamic linear control methods and apparatus for variable speed pump control", которая испрашивает приоритет предварительной заявки США №61/576737, зарегистрированный 16 декабря 2011 г., в настоящее время отозванной;
[3] в заявке США с порядковым номером 14/091795 (документ поверенного №911-019.009-2//F-B&G-X0005), зарегистрированной 27 ноября 2013 г. под названием "3D sensorless conversion method and apparatus", которая испрашивает приоритет предварительной заявки США №61/771375, зарегистрированной 1 марта 2013 г., в настоящее время отозванной;
[4] в заявке США с порядковым номером 14/187817 (документ поверенного №911-019.010-2//F-B&G-X0008), зарегистрированной 24 февраля 2014 г. под названием "A Mixed Theoretical And Discrete Sensorless Converter For Pump Differential Pressure And Flow Monitoring", которая испрашивает приоритет предварительной заявки США №61/803258, зарегистрированной 19 марта 2013, в настоящее время отозванной;
[5] в заявке США с порядковым номером 14/339594 (документ поверенного №911-019.012-2 // F-B&G-X0010US01), зарегистрированной 24 июля 2014 г. под названием "A Mixed Theoretical And Discrete Sensorless Converter For Pump Differential Pressure And Flow Monitoring", которая испрашивает приоритет по предварительной заявке США с порядковым номером 14/339594 (документ поверенного №911-019.012-1 // F-B&G-X0010US01), зарегистрированной 24 июля 2014 г., в настоящее время отозванной;
[6] в заявке США с порядковым номером 14/680667 (документ поверенного №911-019.014-2//F-B&G-X0012US01), зарегистрированной 7 апреля 2015 под названием "A Best-fit affinity sensorless conversion means for pump differential pressure and flow monitoring", которая испрашивает приоритет по предварительной заявке на патент с порядковым номером 61/976749 (документ поверенного №911-019.014-1 // F-B&G-X0012US01), зарегистрированной 8 апреля 2014, в настоящее время отозванной; и
[7] в заявке США с порядковым номером 14/730871 (документ поверенного №911-019.015-2 // F-B&G-X0013US01), зарегистрированной 4 июня 2015 г. под названием "System and flow adaptive sensorless pumping control apparatus energy saving pumping applications", которая испрашивает приоритет по предварительной заявке на патент с порядковым номером 62/007474 (документ поверенного №911-019.015-1// F-B&G-X0013US01), зарегистрированной 4 июня 2014 г., в настоящее время отозванной; и
[8] в заявке США №14/969723 (документ поверенного №911-019.017-2 // F-B&G-X0015US01), зарегистрированной 15 декабря 2015 г. под названием "Discrete valves flow rate converter", которая испрашивает приоритет по предварительной заявке США №62/091,965 (документ поверенного №911-019.017-1 // F-B&G-X0015US), зарегистрированной 15 декабря 2014 г.; права на которые переданы заявителю настоящей заявки на патент, и которые все включены в данное описание путем ссылки на соответствующие источники в их полноте.
Объем изобретения
Следует понимать, что, если в настоящем документе не указано иное, любые из признаков, характеристик, вариантов или модификаций, описанных в отношении конкретной формы осуществления изобретения, могут также быть применены, использованы или объединены с любой другой формой осуществления, описанной в данном документе. Кроме того, чертежи в данном документе выполнены не в масштабе.
Хотя данное изобретение описано на примере центробежного насоса, объем изобретения включает использование тех же признаков в отношении других типов или видов насосов, как известных в настоящее время, так и разработанных в будущем.
Хотя изобретение было описано и проиллюстрировано в отношении примеров его осуществления, в них могут быть сделаны вышеприведенные и различные другие добавления и опущения в пределах сущности и объема данного изобретения.
Группа изобретений касается технологии для применений управления насосом. Устройство для управления насосом имеет процессор или модуль обработки сигналов, сконфигурированный для приема сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса; и определения, основанного на принятой сигнализации, соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI. Устройство предоставляет сигнализацию управления, которая переключает насос в режим NFSD или NFI на основании определенной соответствующей сигнализации. Процессор или модуль обработки сигналов сконфигурирован так, чтобы обеспечивать соответствующую сигнализацию, принимая расход системы при частоте вращения холостого хода насоса в качестве основного параметра обнаружения отсутствия потока, при условии отсутствия потока с помощью уравнения, включающего порог расхода для периода времени контроля. Кроме того, процессор или модуль сконфигурирован для определения, является ли требуемый расход системы при частоте вращения холостого хода насоса меньшим, чем порог расхода для периода времени контроля, и определения, если условие NFSD выполняется, что устройство управления может остаться в режиме NFSD или в NFI, следуя схемам NFSD/ NFI, при этом флаг NFSD остается поднятым, или насос возвращается к нормальной работе, если в системе обнаружен поток на основании уравнения. Изобретения направлены на экономию энергии работы насоса. 12 н. и 4 з. п. ф-лы, 4 ил.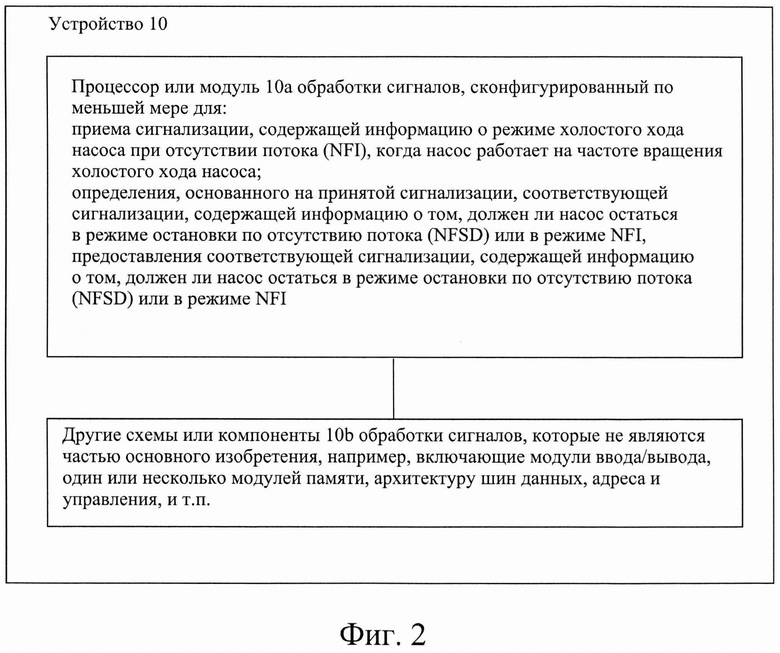
1. Устройство для управления насосом, содержащее:
процессор или модуль обработки сигналов, сконфигурированный по меньшей мере для:
приема сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса;
определения, основанного на принятой сигнализации, соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставления сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом процессор или модуль обработки сигналов сконфигурирован для определения соответствующей сигнализации, принимая расход системы Q* при частоте вращения холостого хода насоса nidle в качестве основного параметра обнаружения отсутствия потока, при условии отсутствия потока, с использованием уравнения:

где порог расхода определяется как Qthr для периода времени контроля Tp; и
процессор или модуль обработки сигналов сконфигурирован для определения, является ли требуемый расход системы Q* при частоте вращения холостого хода насоса меньшим, чем порог расхода Qthr для периода времени контроля Tp, и определения, если условие NFSD выполняется, что устройство управления может остаться в режиме NFSD или режиме NFI, следуя схемам NFSD/NFI, при этом флаг NFSD остается поднятым; или в ином случае возвращения насоса к его нормальной работе, если в системе обнаружен поток на основании уравнения: Qthr≤Q* и t≥Tp.
2. Устройство по п. 1, отличающееся тем, что включает упомянутый насос.
3. Устройство по п. 1, отличающееся тем, что включает один или более модуль памяти, сконфигурированный для хранения сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса, и предоставления упомянутой сигнализации процессору или модулю обработки сигналов.
4. Устройство для управления насосом, содержащее:
процессор или модуль обработки сигналов, сконфигурированный по меньшей мере для:
приема сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса;
определения, основанного на принятой сигнализации, соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставления сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом процессор или модуль обработки сигналов сконфигурирован для определения соответствующей сигнализации, принимая давление в системе P* при частоте вращения холостого хода насоса nidle в качестве параметра обнаружения отсутствия потока, при условии отсутствия потока, с использованием уравнения:

где H0 - давление на холостом ходу, (H0-db) - падение давления относительно давления на холостом ходу и Tp - период времени контроля; и
процессор или модуль обработки сигналов сконфигурирован для определения, является ли давление в системе P* при частоте вращения холостого хода меньшим, чем давление на холостом ходу H0, и большим, чем падение давления относительно давления на холостом ходу (H0-db) в течение периода времени контроля Tp, и определения, если выполняется условие NFSD, что управление может остаться в режиме NFSD или режиме NFI, следуя схемам NFSD/NFI, при этом флаг NFSD остается поднятым; или в ином случае возвращения насоса к его нормальной работе, если поток обнаружен в системе, при условии наличия потока, заданном согласно уравнению: 
5. Устройство для управления насосом, содержащее:
процессор или модуль обработки сигналов, сконфигурированный по меньшей мере для:
приема сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса;
определения, основанного на принятой сигнализации, соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставления сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом процессор или модуль обработки сигналов сконфигурирован для определения соответствующей сигнализации, принимая мгновенный коэффициент сопротивления системы Cv при частоте вращения холостого хода насоса nidle в качестве параметра обнаружения отсутствия потока, при условии отсутствия потока, с использованием уравнения:

где Cv-thr - порог коэффициента сопротивления системы и Tp - период времени контроля; и
процессор или модуль обработки сигналов сконфигурирован для определения, является ли мгновенный коэффициент сопротивления системы Cv при минимальной частоте вращения нулевым или меньшим, чем порог коэффициента сопротивления системы Cv-thr для периода времени контроля Tp, и определения, что выполняется условие NFSD, при этом флаг NFSD соответственно поднимается; или в ином случае для возвращения насоса к его нормальной работе, если поток обнаружен в системе, при условии наличия потока, заданном согласно уравнению: 
6. Устройство для управления насосом, содержащее:
процессор или модуль обработки сигналов, сконфигурированный по меньшей мере для:
приема сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса;
определения, основанного на принятой сигнализации, соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставления сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом процессор или модуль обработки сигналов сконфигурирован для определения соответствующей сигнализации, принимая мощность двигателя w* при частоте вращения холостого хода насоса nidle в качестве параметра обнаружения отсутствия потока, при условии отсутствия потока, с использованием уравнения:

где w* - мощность двигателя, wthr - порог мощности и Tp - период времени контроля; и
процессор или модуль обработки сигналов сконфигурирован для определения, является ли мощность двигателя w* при частоте вращения холостого хода меньшей, чем порог мощности wthr в течение периода времени контроля Tp, и определения, что выполняется условие NFSD и тогда соответственно поднимается флаг NFSD; или в ином случае возвращения насоса к его нормальной работе, если поток обнаружен в системе при условии наличия потока, заданном согласно уравнению: 
7. Способ управления насосом, включающий:
прием процессором или модулем обработки сигналов сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса;
определение, на основании принимаемой сигнализации, процессором или модулем обработки сигналов соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставление сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом способ также включает конфигурирование процессора или модуля обработки сигналов для определения соответствующей сигнализации, принимая расход системы Q* при частоте вращения холостого хода насоса nidle в качестве основного параметра обнаружения отсутствия потока, при условии отсутствия потока, с использованием уравнения:

где порог расхода определяется как Qthr для периода времени контроля Tp; и
конфигурирование процессора или модуля обработки сигналов для определения, является ли требуемый расход системы Q* при частоте вращения холостого хода насоса меньшим, чем порог расхода Qthr для периода времени контроля Tp, и определения, если условие NFSD выполняется, что управление может остаться в режиме NFSD или режиме NFI, следуя схемам NFSD/NFI, при этом флаг NFSD остается поднятым; или в ином случае возвращения насоса к его нормальной работе, если поток обнаружен в системе согласно уравнению: 
8. Способ по п. 7, который включает конфигурирование процессора или модуля обработки сигналов как часть насоса.
9. Способ по п. 7, который включает конфигурирование одного или более модуля памяти для хранения сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса, и предоставления упомянутой сигнализации процессору или модулю обработки сигналов.
10. Способ управления насосом, включающий:
прием процессором или модулем обработки сигналов сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса;
определение, на основании принимаемой сигнализации, процессором или модулем обработки сигналов соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставление сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом способ также включает конфигурирование процессора или модуля обработки сигналов для определения соответствующей сигнализации, принимая давление в системе P* при частоте вращения холостого хода насоса nidle в качестве параметра обнаружения отсутствия потока, при условии отсутствия потока, с использованием уравнения:

где H0 - давление на холостом ходу, (H0-db) - падение давления относительно давления на холостом ходу и Tp - период времени контроля; и
конфигурирование процессора или модуля обработки сигналов для определения, является ли давление в системе P* при частоте вращения холостого хода меньшим, чем давление на холостом ходу H0 и большим, чем падение давления относительно давления на холостом ходу (H0-db) в течение периода времени контроля Tp, и определения, если выполняется условие NFSD, что управление может остаться в режиме NFSD или режиме NFI, следуя схемам NFSD/NFI, при этом флаг NFSD остается поднятым; или в ином случае возвращения насоса к его нормальной работе, если поток обнаружен в системе при условии наличия потока, заданном согласно уравнению: 
11. Способ управления насосом, включающий:
прием процессором или модулем обработки сигналов сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса;
определение, на основании принимаемой сигнализации, процессором или модулем обработки сигналов соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставление сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом способ также включает конфигурирование процессора или модуля обработки сигналов для определения соответствующей сигнализации, принимая мгновенный коэффициент сопротивления системы Cv при частоте вращения холостого хода насоса nidle в качестве параметра обнаружения отсутствия потока, при условии отсутствия потока, с использованием уравнения:

где Cv-thr - порог коэффициента сопротивления системы и Tp - период времени контроля; и
конфигурирование процессора или модуля обработки сигналов для определения, является ли мгновенный коэффициент сопротивления системы Cv при минимальной частоте вращения нулевым или меньшим, чем порог коэффициента сопротивления системы Cv-thr для периода времени контроля Tp, и определения, что выполняется условие NFSD, при этом флаг NFSD соответственно поднимается; или в ином случае возвращения насоса к его нормальной работе, если поток обнаружен в системе при условии наличия потока, заданном согласно уравнению: 
12. Способ управления насосом, включающий:
прием процессором или модулем обработки сигналов сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на частоте вращения холостого хода насоса;
определение, на основании принимаемой сигнализации, процессором или модулем обработки сигналов соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставление сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом способ также включает конфигурирование процессора или модуля обработки сигналов для определения соответствующей сигнализации, принимая мощность двигателя w* при частоте вращения холостого хода насоса nidle в качестве параметра обнаружения отсутствия потока, при условии отсутствия потока, с использованием уравнения:

где w* - мощность двигателя, wthr - порог мощности и Tp - период времени контроля; и
конфигурирование процессора или модуля обработки сигналов для определения, является ли мощность двигателя w* при частоте вращения холостого хода меньшей, чем порог мощности wthr в течение периода времени контроля Tp, и определения, что выполняется условие NFSD, и тогда соответственно поднимается флаг NFSD; или в ином случае возвращения насоса к его нормальной работе, если поток обнаружен в системе, при условии наличия потока, заданном согласно уравнению: 
13. Устройство для управления насосом, содержащее:
процессор или модуль обработки сигналов, сконфигурированный по меньшей мере для:
приема сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на минимальной частоте вращения насоса;
определения, основанного на принятой сигнализации, соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставления сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом процессор или модуль обработки сигналов сконфигурирован для определения соответствующей сигнализации, принимая расход системы Q* при минимальной частоте вращения насоса nmin в качестве основного параметра обнаружения отсутствия потока, при условии отсутствия потока, на основании уравнения:

где порог расхода определяется как Qthr для периода времени контроля Tp; и
процессор или модуль обработки сигналов сконфигурирован для определения, является ли требуемый расход системы Q* при минимальной частоте вращения насоса меньшим, чем порог расхода Qthr для периода времени контроля Tp, то условие NFSD выполняется и флаг NFSD соответственно поднимается.
14. Устройство для управления насосом, содержащее:
процессор или модуль обработки сигналов, сконфигурированный по меньшей мере для:
приема сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на минимальной частоте вращения насоса;
определения, основанного на принятой сигнализации, соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставления сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом процессор или модуль обработки сигналов сконфигурирован для определения соответствующей сигнализации, принимая давление в системе при минимальной частоте вращения насоса nmin в качестве параметра обнаружения отсутствия потока, при условии отсутствия потока, на основании уравнения:

где b0 - минимальное давление, (b0-db) - падение давления, P* - давление в системе, Tp - период времени контроля; и
процессор или модуль обработки сигналов сконфигурирован для определения, является ли давление в системе P* при минимальной частоте вращения насоса nmin меньшим, чем минимальное давление b0, и большим, чем падение давления (b0-db) относительно минимального давления b0 в течение периода времени контроля Tp, то условие NFSD выполняется и флаг NFSD соответственно поднимается.
15. Устройство для управления насосом, содержащее:
процессор или модуль обработки сигналов, сконфигурированный по меньшей мере для:
приема сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на минимальной частоте вращения насоса;
определения, основанного на принятой сигнализации, соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставления сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом процессор или модуль обработки сигналов сконфигурирован для определения соответствующей сигнализации, принимая мгновенный коэффициент сопротивления системы при минимальной частоте вращения насоса nmin в качестве основного параметра обнаружения отсутствия потока, при условии отсутствия потока, на основании уравнения:

где - коэффициент сопротивления системы, Cv-thr - порог коэффициента сопротивления системы и Tp - период времени контроля; и
- коэффициент сопротивления системы, Cv-thr - порог коэффициента сопротивления системы и Tp - период времени контроля; и
процессор или модуль обработки сигналов сконфигурирован для определения, является ли мгновенный коэффициент сопротивления системы при минимальной частоте вращения насоса nmin стремящимся к нулю или меньшим, чем порог коэффициента сопротивления системы Cv-thr за период времени контроля Tp, то условие NFSD выполняется и флаг NFSD соответственно поднимается.
16. Устройство для управления насосом, содержащее:
процессор или модуль обработки сигналов, сконфигурированный по меньшей мере для:
приема сигнализации, содержащей информацию о режиме холостого хода насоса при отсутствии потока (NFI), когда насос работает на минимальной частоте вращения насоса;
определения, основанного на принятой сигнализации, соответствующей сигнализации, содержащей информацию о том, должен ли насос остаться в режиме остановки по отсутствию потока (NFSD) или в режиме NFI; и
предоставления сигнализации управления, которая переключает насос в режим NFSD или режим NFI на основании определенной соответствующей сигнализации;
при этом процессор или модуль обработки сигналов сконфигурирован для определения соответствующей сигнализации, принимая мощность двигателя при минимальной частоте вращения насоса nmin в качестве параметра обнаружения отсутствия потока, при условии отсутствия потока, на основании уравнения:

где wthr - порог мощности, а Tp - период времени контроля; и
процессор или модуль обработки сигналов сконфигурирован для определения, является ли мощность двигателя w* при минимальной частоте вращения насоса nmin меньше, чем порог мощности wthr за период времени контроля Tp, то условие NFSD выполняется и флаг NFSD соответственно поднимается.
| US 8641385 B2, 04.02.2014 | |||
| US 8820404 B2, 02.09.2014 | |||
| US 7945411 B2, 17.05.2011 | |||
| Устройство управления группой насосов | 1988 |
|
SU1548527A1 |

