ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Приоритет этой заявки заявляется по дате подачи предварительной заявки на патент США №62/170,997 (номер патентного поверенного No.911-019.020-1/F-B&G-X0020US), поданной 4 июня 2015 года, озаглавленной «Прямой численный аффинный бессенсорный преобразователь для насосов», которая полностью включена в настоящее описание посредством ссылки.
Настоящее изобретение основывается на семействе технологий, раскрытых в других соответствующих заявках, указанных ниже.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область изобретения
Настоящее изобретение относится к способу управления насосных агрегатов и, более конкретно, настоящее изобретение относится к способу и устройству для определения мгновенного перепада давления и расхода насоса, а также для управления насосных агрегатов на основе указанного определения.
2. Краткое описание предшествующего уровня техники
В предыдущих работах одного или нескольких авторов настоящей заявки, для бессенсорного управления и мониторинга жидкостной насосной системы были разработаны несколько дискретных или численных способов или средств бессенсорного преобразования, которые являются частью семейства соответствующих работ, раскрытых в патентных документах, перечисленных ниже, например, в том числе раскрытых и упомянутых ниже как документы [3] - [6].
Например, после так называемого трехмерного численного преобразования в патентном документе, упоминаемом ниже как [3], на основе использования трех матриц распределений давления, расхода и мощности насоса в зависимости от скорости двигателя и характеристических коэффициентов системы, давление и расход в системе непосредственно преобразовывались из пары значений, считанных с двигателя. Точность преобразования была достаточно удовлетворительной, например, с погрешностью около 5% при штатном режиме работы насоса при перекачке жидкостей.
Однако для того, чтобы при испытаниях избежать утомительного сбора калибровочных данных при использовании способа 3D-преобразования при бессенсорном управлении насосом, был разработан смешанный дискретный и теоретический способ или средство преобразования, представленный в патентном документе, указанном ниже как [4], например, на основе использования уравнений характеристических кривых насоса и системы, что дает приблизительно 5-8% погрешности преобразования без необходимости калибровки приборов.
Кроме того, был разработан способ наилучшего приближения аффинного бессенсорного преобразования, как указано в патентном документе, упомянутом ниже как [6], например, на основе использования характеристических уравнений насоса и системы вместе с эмпирическим уравнением мощности. Характеристическое уравнение насоса и эмпирическое уравнение мощности с использованием наилучшего полиномиального приближения реконструируются из данных насоса, опубликованных производителями насосов. Были получены решения для давлений и расхода системы в точке равновесия в установившемся состоянии давлений насоса и системы, используя, соответственно, эти характеристические уравнения для системы и мощности, с погрешностью преобразования 5%. Однако для немного более сложных характеристических кривых распределения давления и мощности насоса было установлено, что этот способ может представлять собой небольшую проблему, чтобы обеспечить лучшее представление кривых и инвертировать или получить решения этих уравнений кривых. Точность преобразования не всегда может быть удовлетворительной, например, для немного более сложных характеристических распределений насоса.
Ввиду вышеизложенного, в отрасли промышленности по производству насосов остается потребность в лучшем способе определения перепада давления и расхода насоса для бессенсорного управления насосами, без необходимости реконструировать и решать любые характеристические уравнения насоса и системы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, в соответствии с настоящим изобретением, предложен новый уникальный прямой численный аффинный бессенсорный преобразователь для насоса, например, на основе использования перепада давления, расхода и мощности насоса при максимальной скорости насоса, без необходимости реконструировать и решать любые характеристические уравнения насоса и системы. Приведенные здесь способ обработки сигнала от бессенсорного преобразователя или средство для его реализации могут быть применены к любому виду характеристических распределений насоса, простым или сложным, если только сохраняется монотонное распределение мощности в зависимости от потока. Точность вычислений также значительно улучшается, поскольку нет необходимости инвертировать характеристический коэффициент системы как функцию мощности для решения уравнений насоса и системы, а также нет необходимости в дополнительных усилиях по калибровке данных.
Конкретные варианты выполнения
В качестве примера, настоящее изобретение обеспечивает новый и уникальный способ бессенсорного управления насосом.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может относиться к способу или устройству, например, в агрегатах или системах управления жидкостного насоса, где используется процессор сигналов или модуль обработки сигналов, выполненный с возможностью:
приема сигналов, содержащих информацию о перепаде давления, расходе и соответствующих данных мощности насоса при максимальной скорости двигателя, опубликованную производителями насосов, а также информацию о мгновенной мощности и скорости двигателя; и
определения, основываясь на полученных сигналах, соответствующих сигналов, содержащих информацию о мгновенном перепаде давления и расходе насоса, используя уравнение аффинного преобразования и алгоритм численной интерполяции в комбинации.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать один или несколько из следующих признаков:
Процессор сигналов или модуль обработки сигналов может быть выполнен с возможностью использования соответствующих сигналов в качестве управляющих сигналов для управления насосом в насосной системе, например, включая жидкостную насосную систему.
Процессор сигналов или модуль обработки сигналов может быть выполнен с возможностью определения соответствующих сигналов, например, путем использования уравнения аффинного преобразования и алгоритма численной интерполяции в комбинации следующим образом:
получение соответствующей максимальной мощности при максимальной скорости насоса в зависимости от мгновенной мощности двигателя и параметров скорости двигателя с использованием уравнения аффинного преобразования мощности;
получение соответствующего перепада давления и расхода насоса в зависимости от соответствующей максимальной мощности при максимальной скорости насоса с использованием прямой численной интерполяции; и
определение мгновенного перепада давления и расхода насоса в зависимости от мгновенной скорости и мощности двигателя, используя уравнения аффинного преобразования давления и расхода.
Процессор сигналов или модуль обработки сигналов может быть выполнен с возможностью определения мгновенного перепада давления и расхода насоса путем применения уравнения аффинного преобразования и алгоритма численной интерполяции в комбинации, а также путем использования численных вычислительных методов следующим образом:


где  представляют собой функции распределения перепада давления и расхода насоса в зависимости от мощности и сформулированы численно на основе дискретных данных (Pi, Qi, Wi) насоса при полной скорости двигателя посредством уравнения аффинного преобразования мощности
представляют собой функции распределения перепада давления и расхода насоса в зависимости от мощности и сформулированы численно на основе дискретных данных (Pi, Qi, Wi) насоса при полной скорости двигателя посредством уравнения аффинного преобразования мощности

Устройство может содержать или представлять собой контроллер насоса для управления насосом, например, в такой жидкостной насосной системе.
Устройство может содержать или представлять собой жидкостную насосную систему, имеющую насос и контроллер насоса, в том числе, когда контроллер насоса выполнен с процессором сигналов или модулем обработки сигналов для управления насосом.
В качестве примера, процессор сигналов или модуль обработки сигналов может содержать или представлять собой по меньшей мере один процессор сигналов и по меньшей мере одно запоминающее устройство, содержащее компьютерный программный код, причем указанное по меньшей мере одно запоминающее устройство и компьютерный программный код выполнен с возможностью, вместе с по меньшей мере одним процессором сигналов, вынуждать процессор сигналов по меньшей мере принимать сигналы (или, например, связанные сигналы) и определять соответствующие сигналы на основе принятых сигналов. Процессор сигналов или модуль обработки сигналов может быть выполнен с соответствующим компьютерным программным кодом для реализации подходящих алгоритмов обработки сигналов и/или функциональных возможностей в соответствии с изложенным в настоящем документе.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может относиться к способу, включающему этапы, на которых:
принимают в процессоре сигналов или модуле обработки сигналов сигналы, содержащие информацию о перепаде давления, расходе и о соответствующих данных мощности при максимальной скорости двигателя, опубликованную производителями насосов, а также мгновенную мощность и скорость двигателя; и
определяют, основываясь на полученных сигналах, в процессоре сигналов или модуле обработки сигналов соответствующие сигналы, содержащие информацию о мгновенном перепаде давления и расходе насоса с использованием уравнения аффинного преобразования и алгоритма численной интерполяции в комбинации.
Способ может также включать один или несколько признаков, изложенных в настоящем документе, включая получение от процессора сигналов или модуля обработки сигналов соответствующих сигналов в качестве управляющих сигналов для управления насосом в насосной системе, например, включая жидкостную насосную систему.
Настоящая заявка предлагает новый способ, который является дальнейшим усовершенствованием и основан на вышеупомянутом семействе способов, изложенных в настоящем документе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Чертежи включают в себя следующие фигуры, которые необязательно приведены в масштабе:
Фиг. 1 включает Фиг 1А, 1В и 1С, которые изображают примеры бессенсорных многоступенчатых систем управления насосами, например, в которых настоящее изобретение может быть реализовано или сформировано в соответствии с его некоторыми вариантами выполнения.
Фиг. 2А изображает принципиальную схему бессенсорного преобразователя для насоса для получения давления (в футах) и расхода (в галлонах/мин) насоса в зависимости от мощности (в л.с.) двигателя и скорости (об/мин) двигателя, например, в котором настоящее изобретение может быть реализовано или который может составлять его часть, в соответствии с его некоторыми вариантами выполнения.
Фиг. 2В изображает блок-схему устройства, например, имеющего процессор сигналов или модуль обработки сигналов, выполненный с возможностью реализации функциональных возможностей обработки сигналов, в соответствии с некоторыми вариантами выполнения изобретения.
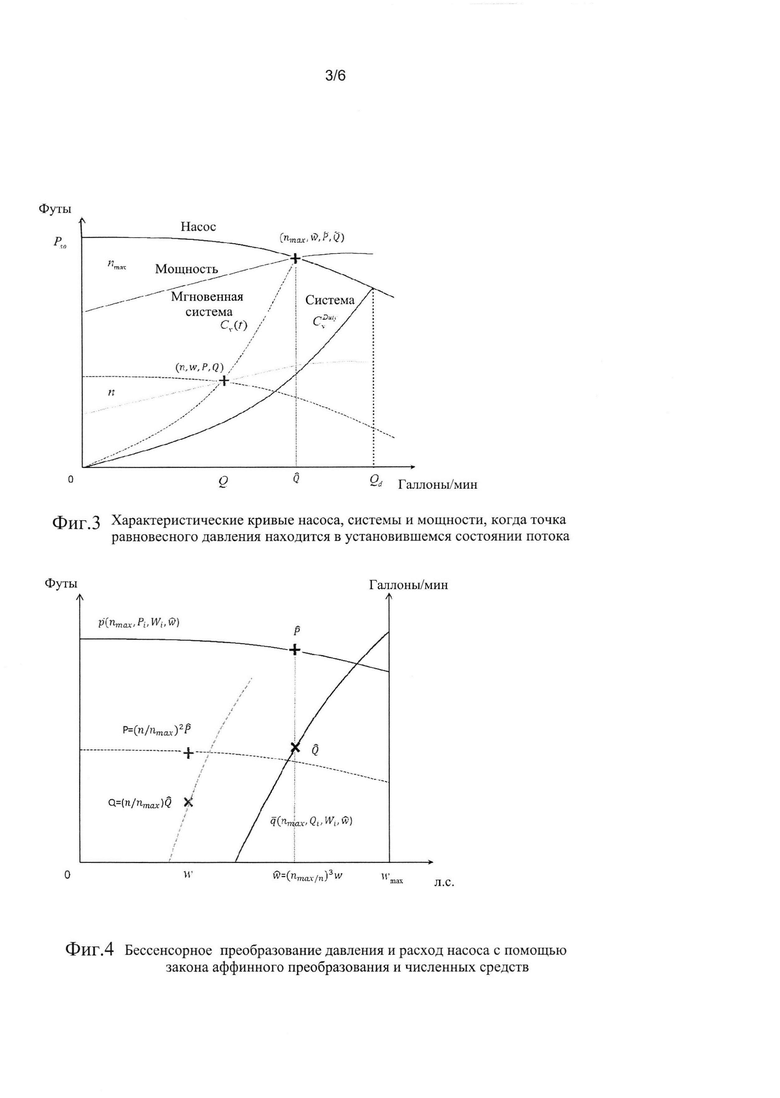
Фиг. 3 изображает график давления (в футах) насоса в зависимости от расхода (в галлонах/мин), показывающий характеристические кривые насоса, системы и мощности с точкой равновесия давления при установившемся режиме потока.
Фиг. 4 изображает график давления (в футах) насоса, мощности двигателя (в л.с.) и расхода (в галлонах/мин), показывающий бессенсорное преобразование давления и расхода насоса с использованием способа аффинного преобразования и численной обработки сигналов, например, в соответствии с реализациями некоторых вариантов выполнения изобретения.
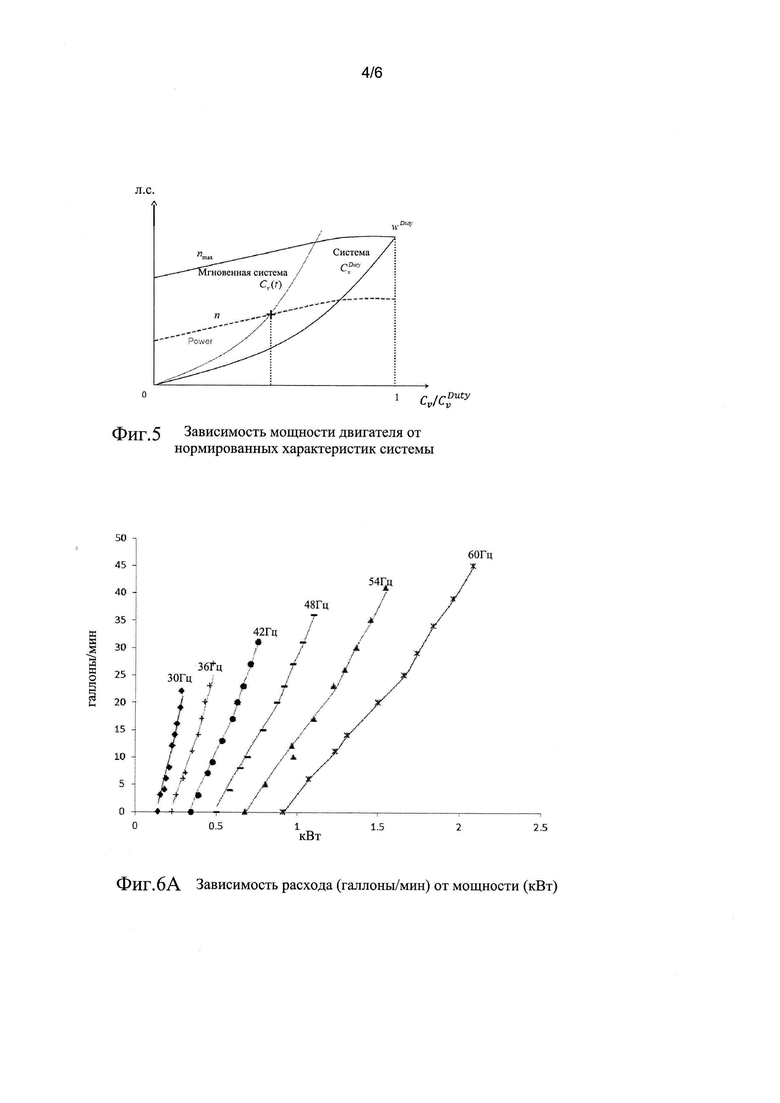
Фиг. 5 изображает график мощности (в л.с.) двигателя в зависимости от нормированных характеристик (Cv/CvDuty) системы, например, в соответствии с реализациями некоторых вариантов выполнения изобретения.
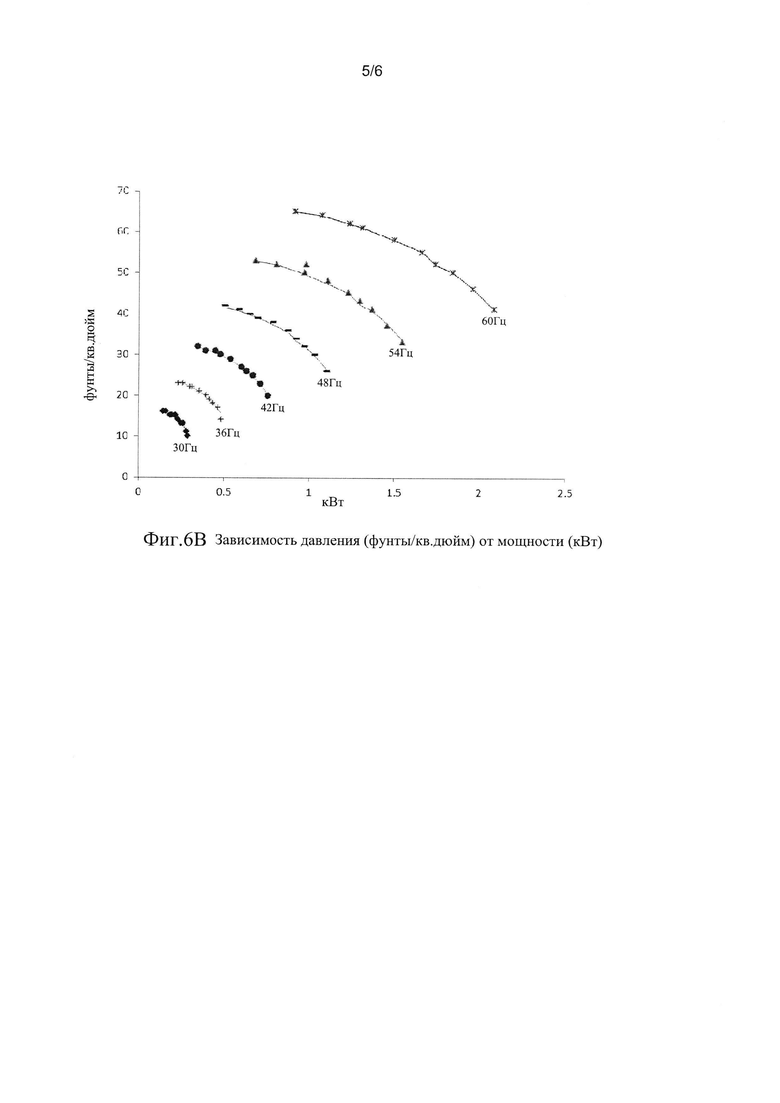
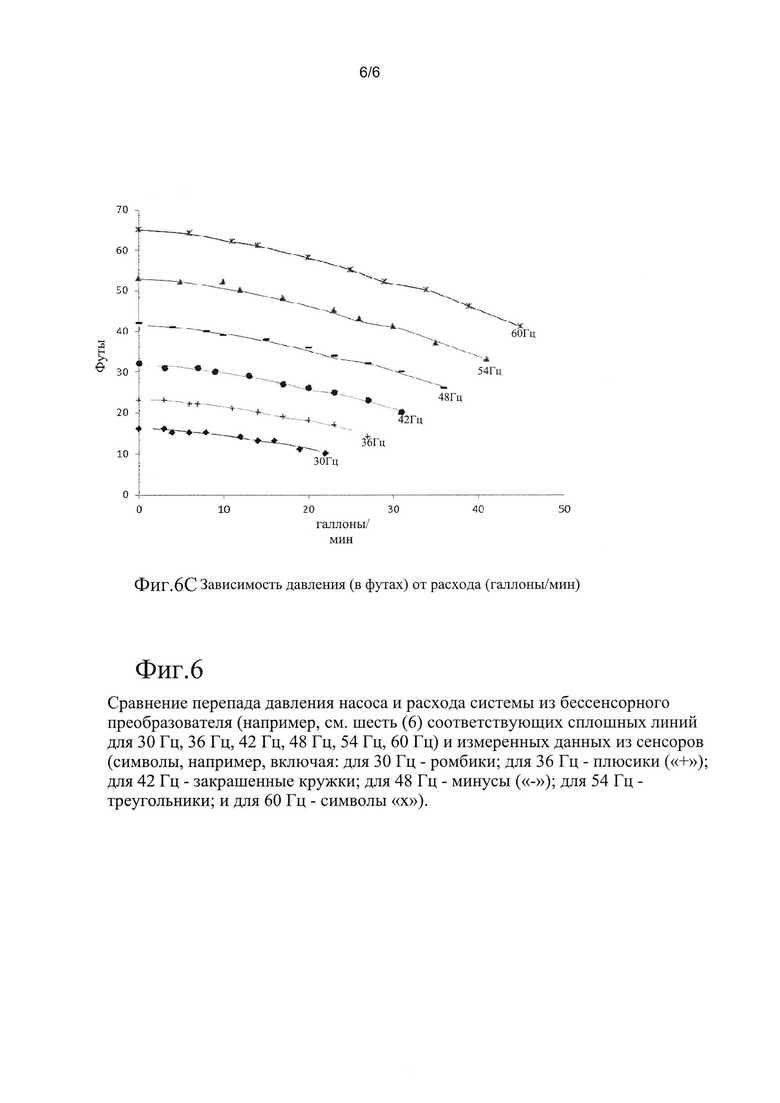
Фиг. 6 включает Фиг. 6А, 6В и 6С, которые изображают сравнение перепада давления насоса и расхода системы, полученных из бессенсорного преобразователя, например, и каждая из которых имеет шесть (6) соответствующих сплошных линий для 30 Гц, 36 Гц, 42 Гц, 48 Гц, 54 Гц, 60 Гц, и каждая из которых также имеет измеренные данные от датчиков, обозначенных символами, например, например: для 30 Гц, ромбики; 36 Гц, плюсики («+»); 42 Гц, закрашенные кружки; 48 Гц, минусы («-»), 54 Гц, треугольники; и 60 Гц, символы «х»; причем Фиг. 6А изображает график расхода (в галлонах/мин) в зависимости от мощности (в кВт); Фиг. 6В изображает график давления (в фунтах/кв.дюйм) в зависимости от мощности (в кВт); и Фиг. 6С изображает график давления (в футах) в зависимости от расхода (в галлонах/мин).
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг. 2А и 2В: Реализация функциональных возможностей обработки сигналов.
В целом, настоящее изобретение обеспечивает новый и уникальный способ прямого численного аффинного бессенсорного преобразования сигнала насоса или средство для его реализации, например, основанное на обработке перепада давления, расхода и мощности насоса при максимальной скорости насоса, которые опубликованы производителями насосов, а также на законе аффинного преобразования насоса, чтобы прямо и численно получать мгновенные перепады давления и расход насоса. Способ бессенсорного преобразования сигнала или средство для его реализации, изложенные в настоящем документе, могут быть применены к любым формам характеристических распределений насоса, простым или сложным, поскольку нет необходимости в реконструкции и решении любых характеристических уравнений насоса и системы. В результате точность вычислений значительно улучшается.
На Фиг. 1 показаны примеры бессенсорных многоступенчатых систем управления насосами, например, в которых настоящее изобретение может быть реализовано или может формировать их часть, в соответствии с некоторыми вариантами его выполнения. Например, на Фиг. 1А показана жидкостная насосная система с управлением переменной скоростью, а на Фиг. 1В и 1С изображен бессенсорный преобразователь для насоса для перепада давления и расхода насоса, связанный с коэффициентом жидкостной системы в нагнетательной линии насоса, а также с мощностью двигателя и скоростью на другом конце двигателя.
В качестве примера, способ прямого численного аффинного бессенсорного преобразования сигнала насоса или средство для его реализации может включать или представлять собой часть бессенсорного преобразователя для насоса, показанного на Фиг. 2А, который обрабатывает сигналы, содержащие информацию о мощности двигателя (в л.с.) и скорости (в об/мин) и определяет подходящие обработанные сигналы, содержащие информацию о давлении (в футах) и о расходе (в галлонах/мин) насоса. Бессенсорный преобразователь для насоса, показанный на Фиг. 2А, может быть реализован или выполнен в виде части устройства, например, в соответствии с изложенным в настоящем документе.
В качестве дальнейшего примера, на Фиг. 2В показано устройство 10, выполненное в соответствии с некоторыми вариантами выполнения изобретения, например, имеющее процессор сигналов или модуль 10а обработки сигналов, выполненный с возможностью по меньшей мере:
получения сигналов, содержащих информацию о перепаде давления, расходе и о соответствующих данных мощности насоса при максимальной скорости двигателя, опубликованную производителями насосов, а также о мгновенной мощности и скорости двигателя; и
определения, основываясь на полученных сигналах, соответствующих сигналов, содержащих информацию о мгновенном перепаде давления и расходе насоса, используя уравнение аффинного преобразования и алгоритм численной интерполяции в комбинации.
При работе процессор сигналов или модуль обработки сигналов может быть выполнен с возможностью обеспечения соответствующих сигналов в качестве управляющих сигналов для управления насосом в насосной системе, например, такой как жидкостная насосная система. Соответствующие сигналы могут содержать информацию, используемую для управления жидкостной насосной системой.
Процессор обработки сигналов или модуль 10а обработки сигналов может быть выполнен как насос и/или контроллер насоса или формировать его часть, например, может содержать или быть реализован в комбинации с насосом или с выполненным в нем контроллером. В качестве примера, предусмотрены варианты выполнения, в которых устройство представляет собой насос, имеющий процессор сигналов или модуль 10а обработки сигналов, и предусмотрены варианты выполнения, в которых устройство представляет собой средство управления насосом или контроллер, имеющий процессор сигналов или модуль 10а обработки сигналов.
Как должно быть понятно специалисту, настоящее изобретение может быть реализовано с использованием характеристик системы и связанных с ними уравнений, например, в соответствии с тем, что изложено в настоящем документе, а также с использованием других типов или видов характеристик системы и связанных с ними уравнений, которые либо уже известны, либо будут получены в будущем.
В качестве примера, функциональность устройства 10 может быть реализована с использованием аппаратного обеспечения, программного обеспечения, прошивки или их комбинации. В типичной реализации программного обеспечения устройство 10 содержит одну или несколько архитектур на основе микропроцессора, имеющих, например, по меньшей мере один процессор сигналов или элемент 10а, аналогичный микропроцессору. Специалист может запрограммировать с помощью подходящего программного кода, например, реализуемого на основе микроконтроллера или на основе микропроцессора, для выполнения описанных в настоящем документе функций без чрезмерного экспериментирования. Например, процессор сигналов или модуль 10а обработки сигналов может быть выполнен, например, специалистом без излишнего экспериментирования, с возможностью приема сигналов, содержащих информацию о перепаде давления, расходе и о соответствующих данных мощности при максимальной скорости двигателя, опубликованную производителями насосов, а также информацию о мгновенной мощности и скорости двигателя, в соответствии с раскрытым в настоящем документе описанием.
Кроме того, процессор сигналов или модуль 10а обработки сигналов может быть выполнен, например, специалистом, без чрезмерного экспериментирования, чтобы определить соответствующие сигналы, содержащие информацию о мгновенном перепаде давления и расходе насоса, используя уравнение аффинного преобразования и алгоритм численной интерполяции в комбинации, в соответствии с тем, что раскрыто в настоящем документе.
Объем изобретения не должен ограничиваться какой-либо конкретной реализацией с использованием технологии, которая теперь известна или будет разработана в будущем. Объем изобретения включает реализацию функциональных возможностей процессоров 10а в качестве автономного процессора, процессора сигналов или модуля обработки сигналов, а также отдельный процессор или модули обработки сигналов, а также некоторую их комбинацию.
Устройство 10 также может содержать, например, другие схемы или компоненты 10b процессора сигналов, включая оперативное запоминающее устройство или модуль (ОЗУ) памяти и/или постоянное запоминающее устройство (ПЗУ), устройства ввода / вывода и управления, а также шины данных и адреса, их соединяющие и/или по меньшей мере один входной процессор и по меньшей мере один выходной процессор, например, что будет понятно специалисту в данной области техники.
Фиг. 3-6: Подробная реализация
Ниже представлено подробное описание реализации настоящего изобретения, например, в соответствии с изложенным со ссылкой на Фиг. 3-6.
Рассматривая замкнутую систему, расход и перепад давления насоса на скорости двигателя для заданного положения системы могут быть получены при установившемся равновесном состоянии давлений насоса и системы, например, из пересечения графиков функций насоса и системы, схематически показанных на Фиг. 3. В настоящем документе мгновенная характеристическая кривая насоса или кривая насосных характеристик представляет собой перепад Р давления насоса в зависимости от его расхода Q при скорости n двигателя. Мгновенная характеристическая кривая системы представляет собой уравнение расхода системы  . Закон аффинного преобразования насоса, представленный уравнениями для расхода насоса, перепада давления насоса и мощности двигателя, т.е. Q/Qmax=n/nmax, P/Pmax=(n/nmax)2 и w/wmax=(n/nmax)3, может быть использован для вычисления и определения, соответственно, перепада давления, расхода и мощности насоса в зависимости от мгновенной скорости n двигателя в некотором положении системы. Вместо решения уравнений для характеристических кривых насоса и системы, для получения решения установившегося равновесного состояния давления и расхода при любой скорости насоса, как предлагается в патентном документе, упомянутом ниже как [6], в настоящем документе предлагается подход, заключающийся в прямом численном аффинном бессенсорном преобразовании, например, в соответствии с показанным схематически на Фиг. 4. В настоящем документе перепад давления, расход насоса и соответствующие им данные мощности на максимальной скорости двигателя вместе с законом аффинного преобразования насоса могут использоваться для получения мгновенного давления Р и расхода Q в зависимости от мгновенной скорости n и мощности w двигателя непосредственно и численно.
. Закон аффинного преобразования насоса, представленный уравнениями для расхода насоса, перепада давления насоса и мощности двигателя, т.е. Q/Qmax=n/nmax, P/Pmax=(n/nmax)2 и w/wmax=(n/nmax)3, может быть использован для вычисления и определения, соответственно, перепада давления, расхода и мощности насоса в зависимости от мгновенной скорости n двигателя в некотором положении системы. Вместо решения уравнений для характеристических кривых насоса и системы, для получения решения установившегося равновесного состояния давления и расхода при любой скорости насоса, как предлагается в патентном документе, упомянутом ниже как [6], в настоящем документе предлагается подход, заключающийся в прямом численном аффинном бессенсорном преобразовании, например, в соответствии с показанным схематически на Фиг. 4. В настоящем документе перепад давления, расход насоса и соответствующие им данные мощности на максимальной скорости двигателя вместе с законом аффинного преобразования насоса могут использоваться для получения мгновенного давления Р и расхода Q в зависимости от мгновенной скорости n и мощности w двигателя непосредственно и численно.
Процедуры численного определения, вычисления и обработки сигналов для получения мгновенного перепада Р давления и расхода Q насоса следующие. Во-первых, соответствующая максимальная мощность  при максимальной скорости nmax насоса в зависимости от пары мгновенной мощности w и скорости n двигателя может быть получена с использованием уравнения аффинного преобразования мощности. Соответствующий перепад
при максимальной скорости nmax насоса в зависимости от пары мгновенной мощности w и скорости n двигателя может быть получена с использованием уравнения аффинного преобразования мощности. Соответствующий перепад  давления и расход
давления и расход  в зависимости от мощности
в зависимости от мощности  при nmax затем могут быть получены с помощью численной интерполяции напрямую. Наконец, мгновенное давление Р и расход Q в зависимости от мгновенной скорости n и мощности w двигателя могут быть получены с помощью уравнений аффинного преобразования давления и расхода, основанных, соответственно, на перепаде давления
при nmax затем могут быть получены с помощью численной интерполяции напрямую. Наконец, мгновенное давление Р и расход Q в зависимости от мгновенной скорости n и мощности w двигателя могут быть получены с помощью уравнений аффинного преобразования давления и расхода, основанных, соответственно, на перепаде давления  и расходе
и расходе  насоса. Обратите внимание, что закон аффинного преобразования подразумевает, что бессенсорное преобразование параметра выполняется вдоль характеристической кривой системы, показанной на Фиг. 3.
насоса. Обратите внимание, что закон аффинного преобразования подразумевает, что бессенсорное преобразование параметра выполняется вдоль характеристической кривой системы, показанной на Фиг. 3.
Перепад давления и расход насоса после выполнения описанных выше процедур численного определения, вычисления и обработки сигналов могут быть записаны в виде уравнений (1) и (2) следующим образом:


где  и
и представляют собой функции распределения перепада давления и расхода насоса в зависимости от мощности и сформулированы численно на основе дискретных данных (Pi, Qi, Wi) насоса при полной скорости nmax двигателя (или при любой заданной скорости), а
представляют собой функции распределения перепада давления и расхода насоса в зависимости от мощности и сформулированы численно на основе дискретных данных (Pi, Qi, Wi) насоса при полной скорости nmax двигателя (или при любой заданной скорости), а  - соответствующая функция мощности при полной скорости птах насоса, согласно уравнению (3) аффинного преобразования мощности
- соответствующая функция мощности при полной скорости птах насоса, согласно уравнению (3) аффинного преобразования мощности

Функции распределения  и
и  могут быть сформулированы непосредственно с использованием способа или средства обработки цифровых сигналов, например, путем использования интерполяции или подгоночной кривой на основе их дискретных данных (Pi, Qi, wi) испытаний насоса на полной скорости nmax двигателя. Однако для слегка более сложных распределений для достижения лучшего функционального представления и требуемой точности может быть реализована кусочно-линейная численная интерполяция. Заметим, что в настоящем документе также может потребоваться монотонное распределение мощности в зависимости от расхода.
могут быть сформулированы непосредственно с использованием способа или средства обработки цифровых сигналов, например, путем использования интерполяции или подгоночной кривой на основе их дискретных данных (Pi, Qi, wi) испытаний насоса на полной скорости nmax двигателя. Однако для слегка более сложных распределений для достижения лучшего функционального представления и требуемой точности может быть реализована кусочно-линейная численная интерполяция. Заметим, что в настоящем документе также может потребоваться монотонное распределение мощности в зависимости от расхода.
В случае, например, если может потребоваться точность в области низкой скорости, при которой система почти прекратила работу, закон аффинного преобразования мощности насоса в соответствии с Уравнением 3 может быть недостаточным для представления соотношения мощности двигателя и скорости, из-за проскальзывания двигателя на низкой скорости, как указано в патентном документе, обозначенном ниже как [6]. Поэтому модифицированную форму представления закона аффинного преобразования мощности можно сформулировать аналогичным образом, используя уравнение (4) следующим образом:

где  представляет собой функцию распределения энергии, откалиброванную на основе массива дискретных и нормированных данных мощности двигателя в любом положении системы, которая может быть получена численно путем интерполяции или подгонки. Обратите внимание, что положение системы может быть любым положением от выключенного до полностью открытого, так как нормированное распределение мощности относительно скорости n почти идентично в любом положении системы.
представляет собой функцию распределения энергии, откалиброванную на основе массива дискретных и нормированных данных мощности двигателя в любом положении системы, которая может быть получена численно путем интерполяции или подгонки. Обратите внимание, что положение системы может быть любым положением от выключенного до полностью открытого, так как нормированное распределение мощности относительно скорости n почти идентично в любом положении системы.
Для жидкостной системы с переменными характеристиками, в которой расход регулируется клапанами или другими регуляторами потока, также в любое заданное время может быть необходимым знать мгновенный характеристический коэффициент системы для любого положения системы. Следуя аналогичному подходу, нормированный характеристический коэффициент системы в зависимости от данных мощности при полной скорости nmax двигателя, представленный на Фиг. 5, может быть сформулирован непосредственно так, как указано в Уравнении (5):

где  представляет собой функцию распределения коэффициентов системы в зависимости от нормированных данных мощности двигателя и мгновенной обратной максимальной мощности
представляет собой функцию распределения коэффициентов системы в зависимости от нормированных данных мощности двигателя и мгновенной обратной максимальной мощности  при максимальной скорости насоса. Обратите внимание, что мгновенный коэффициент системы имеет одно и то же значение вдоль мгновенной характеристической кривой системы, показанной на Фиг. 3.
при максимальной скорости насоса. Обратите внимание, что мгновенный коэффициент системы имеет одно и то же значение вдоль мгновенной характеристической кривой системы, показанной на Фиг. 3.
Путем использования прямого численного аффинного бессенсорного преобразователя, определенного в Уравнениях 1-4, значения давления и расхода могут быть определены и рассчитаны для насосной системы и сравнены с измеренными данными, которые, соответственно, показаны на Фиг. 6. Точность преобразования является достаточно удовлетворительной с погрешностью около 5% при нормальной работе насоса при перекачке жидкостей.
Прямой численный аффинный бессенсорный преобразователь для насоса, приведенный в настоящем документе, может быть использован для большинства приложений по управлению и контролю жидкостных насосов, поскольку он сформулирован непосредственно и численно из характеристических данных мощности насоса, опубликованных производителями насосов из данных испытаний, а также с учетом закона аффинного преобразования, без необходимости инвертирования любых характеристических уравнений при их решении, как указано в патентных документах, обозначенных ниже как [3] - [6]. Этот способ может быть применен к любому виду характеристических распределений насоса, простым или сложным, при условии сохранения монотонного распределения мощности в зависимости от расхода. Более того, прямой численный аффинный бессенсорный преобразователь для насоса, раскрытый в настоящем документе, намного проще настраивать, обеспечивая при этом достаточно удовлетворительную точность.
Различные моменты, касающиеся новизны
Настоящее изобретение может также включать или представлять собой один или несколько из следующих вариантов выполнения / реализаций.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, в которых прямой численный аффинный бессенсорный преобразователь для насоса содержит бессенсорный преобразователь насоса, который дает перепад давления насоса и расход системы в зависимости от заданной пары значений скорости и мощности двигателя, основываясь на перепаде давления, расходе и мощности насоса на максимальной скорости насоса, опубликованных производителями насосов, а также основываясь на законе аффинного преобразования насоса. Прямые численные процедуры расчета для получения мгновенного перепада давления и расхода насоса непосредственно и численно представлены схематически на Фиг. 3 и 4. Способ или средство обработки сигналов для такой реализации может применяться к любым формам распределения характеристик насоса, пока сохраняется монотонное распределение мощности в зависимости от расхода.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, в которых упомянутый выше прямой численный аффинный бессенсорный преобразователь для насоса содержит численное выражение перепада давления Р (n, w) и расхода Q (n, w) насоса в Уравнениях 1 и 2 при установившемся равновесном состоянии перепада давления насоса и давления в системе, что схематически представляет собой пересечение характеристических кривых насоса и системы, основываясь на численных данных (Pi, Qi, Wi) распределения перепада давления и расхода насоса при полной скорости двигателя и на законе аффинного преобразования для насоса.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, в которых функции прямого числового распределения в прямом численном аффинном бессенсорном преобразователе для насоса, упомянутом выше, включает способ обработки сигнала или средство для его реализации, чтобы получить функцию распределения давления и расхода насоса в терминах мощности при максимальной скорости непосредственно и численно, как показано на Фиг. 4. При этом нет необходимости, чтобы характеристический коэффициент системы был инвертирован по мощности, еще до получения давления и расхода насоса. Точность вычислений значительно улучшается.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, где упомянутые выше прямые числовые процедуры в прямом численном аффинном бессенсорном преобразователе для насоса включают:
1) получение соответствующей максимальной мощности  при максимальной скорости nmax насоса относительно пары мгновенной мощности и скорости двигателя, n и w, с использованием уравнения аффинного преобразования мощности;
при максимальной скорости nmax насоса относительно пары мгновенной мощности и скорости двигателя, n и w, с использованием уравнения аффинного преобразования мощности;
2) получение, с помощью непосредственной цифровой интерполяции, соответствующего перепада  давления и расхода
давления и расхода  насоса относительно мощности
насоса относительно мощности  при nmax;
при nmax;
3) получение, в конечном итоге, мгновенного Р давления и расхода Q в зависимости от мгновенной скорости и мощности двигателя, n и w, из уравнений аффинного преобразования давления и расхода, основываясь, соответственно, на перепаде  давления и расходе
давления и расходе  насоса.
насоса.
Обратите внимание, что закон аффинного преобразования подразумевает, что бессенсорное преобразование параметров выполняют вдоль характеристической кривой системы, показанной на Фиг. 3.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, в которых точка равновесного давления в установившемся состоянии в прямом численном аффинном бессенсорном преобразователе для насоса, упомянутом выше, содержит точку пересечения функциональных кривых насоса и системы, как показано на Фиг. 3. Давление в системе или перепад давления и расход насоса могут быть получены из Уравнений 1 и 2 в точке равновесия давления для заданной пары значений показаний двигателя.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, в которых численные методы в прямом численном аффинном бессенсорном преобразователе для насоса, упомянутом выше, могут содержать любые виды алгоритмов численной интерполяции и подгонки для получения перепада давления  и расхода насоса при максимальной скорости насоса. Однако следует отметить, что в случае незначительно усложненных распределений для достижения лучшего функционального представления и точности можно рекомендовать кусочно-линейную численную интерполяцию.
и расхода насоса при максимальной скорости насоса. Однако следует отметить, что в случае незначительно усложненных распределений для достижения лучшего функционального представления и точности можно рекомендовать кусочно-линейную численную интерполяцию.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации с использованием функции аффинного преобразования мощности насоса в Уравнении 3, например, для получения мощности  при максимальной скорости насоса в прямом численном аффинном бессенсорном преобразователе для насоса, упомянутом выше. Предпочтительный вариант модифицированной функции аффинного преобразования мощности может быть сформулирован аналогично выражению численного распределения для
при максимальной скорости насоса в прямом численном аффинном бессенсорном преобразователе для насоса, упомянутом выше. Предпочтительный вариант модифицированной функции аффинного преобразования мощности может быть сформулирован аналогично выражению численного распределения для  в Уравнении 4, например, откалиброванном на основе массива дискретных и нормированных данных (ni Wi) мощности двигателя в любом положении системы, которое может быть снова получено численно путем интерполяции или подгонки. Откалиброванная модифицированная функция аффинного преобразования мощности может быть введена для компенсации потерь мощности из-за проскальзывания двигателя в области низкой скорости.
в Уравнении 4, например, откалиброванном на основе массива дискретных и нормированных данных (ni Wi) мощности двигателя в любом положении системы, которое может быть снова получено численно путем интерполяции или подгонки. Откалиброванная модифицированная функция аффинного преобразования мощности может быть введена для компенсации потерь мощности из-за проскальзывания двигателя в области низкой скорости.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, в которых численное преобразование характеристического коэффициента системы в прямом численном аффинном бессенсорном преобразователе для насоса включает численную функцию характеристического коэффициента системы в форме  в Уравнении 5, который представляет собой коэффициент распределения системы в зависимости от нормированной мощности двигателя. Для мгновенной инвертированной максимальной мощности
в Уравнении 5, который представляет собой коэффициент распределения системы в зависимости от нормированной мощности двигателя. Для мгновенной инвертированной максимальной мощности  при максимальной скорости насоса, полученной из Уравнений 3 или 4, мгновенный характеристический коэффициент системы может быть получен с помощью Уравнения 5 непосредственно и численно путем интерполяции или подгонки. Обратите внимание, что мгновенный характеристический коэффициент системы может иметь одинаковое значение вдоль мгновенной характеристической кривой системы, показанной на Фиг. 3.
при максимальной скорости насоса, полученной из Уравнений 3 или 4, мгновенный характеристический коэффициент системы может быть получен с помощью Уравнения 5 непосредственно и численно путем интерполяции или подгонки. Обратите внимание, что мгновенный характеристический коэффициент системы может иметь одинаковое значение вдоль мгновенной характеристической кривой системы, показанной на Фиг. 3.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, в которых данные о характеристических кривых насоса и мощности на максимальной скорости двигателя в прямом численном аффинном бессенсорном преобразователе для насоса для преобразования перепада давления и расхода насоса из мощности и скорости насоса включают данные о характеристических кривых насоса и мощности, опубликованные производителями насосов, или несколько точек данных насоса, полученных на полной скорости двигателя при испытаниях. В настоящем документе данные о характеристических кривых мощности двигателя также могут быть заменены любыми электрическими или механическими сигналами показаний двигателя, такими как ток или крутящий момент двигателя и т.п.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, в которых насосная жидкостная система в прямом численном аффинном бессенсорном преобразователе для насоса включает все замкнутые или открытые насосные жидкостные системы, такие как основные насосные системы, вспомогательные насосные системы, системы циркуляции воды и системы повышения давления. Описанные в настоящем документе системы могут состоять из одной зоны или нескольких зон.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, в которых гидравлические сигналы в прямом численном аффинном бессенсорном преобразователе для насоса могут включать перепад давления насоса, давление в системе или давление в зоне, расход в системе или зоне и так далее.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может включать или представлять собой реализации, в которых способы передачи и перенаправления управляющих сигналов могут включать все традиционные способы и средства измерения и передачи, которые используются в настоящее время и известны в данной области техники. Предпочтительно, способы передачи сигналов от беспроводного датчика являются оптимальными и предпочтительными.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, в которых упомянутые выше насосы для жидкостных насосных систем могут содержать один насос, циркулятор, группу параллельных сопряженных насосов или циркуляторов, группу последовательных сопряженных насосов или циркуляторов, или их комбинацию.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может содержать или представлять собой реализации, в которых регулирование потока в системе может включать ручные или автоматические регулирующие клапаны, ручные или автоматические циркуляционные регуляторы или их комбинации.
Жидкостные характеристики и функции дискретного распределения Способы определения гидравлических характеристик и способы построения распределений таких гидравлических характеристик, например, как показано на Фиг. 3-6, также известны в данной области техники; при этом объем изобретения не должен ограничиваться каким-либо конкретным типом или видом, который либо известен, либо будет разработан позже.
Более того, специалист в данной области техники сможет реализовать основное изобретение без чрезмерного экспериментирования, основываясь на раскрытом в настоящем документе описании, включая определение гидравлических характеристик и построение распределений таких гидравлических характеристик, как показано в настоящем документе.
Компьютерный программный продукт
Настоящее изобретение также может быть, например, представлять собой компьютерный программный продукт, имеющий считываемый компьютером носитель с внедренным в него исполняемым компьютером кодом для реализации способа, например, при запуске на устройстве обработки сигналов, которое является частью такого контроллера насоса или клапана. В качестве примера, компьютерный программный продукт может, например, представлять собой компакт-диск, гибкий диск, флэш-карту, карту памяти, а также другие типы или виды запоминающих устройств, которые могут хранить такой исполняемый компьютерный код на таком машиночитаемом носителе, который известен или будет разработан позже.
Другие связанные заявки
Заявка связана с другими патентными заявками, которые являются частью общего семейства технологий, разработанных одним или несколькими авторами настоящего изобретения, и раскрыты в следующих заявках:
[1] Заявка на патент США №12/982,286 (номер патентного поверенного №911-019.001-1//F-B&G-1001), поданная 30 декабря 2010 года и озаглавленная «Способ и устройство для управления насосом с использованием вариативной эквивалентной характеристической кривой системы, АКА - адаптивная управляющая кривая», по которой был выдан патент США №8,700,221 от 15 апреля 2014 года; и
[2] Заявка на патент США №13/717,086 (номер патентного поверенного №911-019.004-2//F-B&G-X0001), поданная 17 декабря 2012 года и озаглавленная «Динамические способы линейного управления и устройство для управления насоса с переменной скоростью», приоритет которой заявляется по дате подачи предварительной заявки на патент США №61/576,737, поданной 16 декабря 2011 года, в настоящее время отозванной;
[3] Заявка на патент США №14/091,795 (номер патентного поверенного №911-019.009-2//F-B&G-X0005), поданная 27 ноября 2013 года и озаглавленная «Способ и устройство трехмерного бессенсорного преобразования», приоритет которой заявляется по дате подачи предварительной заявки на патент США №61/771,375, поданной 1 марта 2013 года, в настоящее время отозванной;
[4] Заявка на патент США №14/187,817 (номер патентного поверенного №911-019.010-2//F-B&G-X0008), поданная 24 февраля 2014 года и озаглавленная «Смешанный теоретический и дискретный бессенсорный преобразователь для контроля перепада давления и расхода насоса», приоритет которой заявляется по дате подачи предварительной заявки на патент США №61/803,258, поданной 19 марта 2013 года, в настоящее время отозванной;
[5] Заявка на патент США №14/339,594 (номер патентного поверенного №911-019.012-2//F-B&G-X0010US01), поданная 24 июля 2014 года и озаглавленная «Бессенсорное адаптивное управление насосом с самокалибрующимся устройством для жидкостной насосной системы», приоритет которой заявляется по дате подачи предварительной заявки на патент США №14/339,594, поданной 24 июля 2014 года, в настоящее время отозванной;
[6] Заявка на патент США №14/680,667 (номер патентного поверенного №911-019.014-2//F-B&G-X0012US01), поданная 7 апреля 2015 года и озаглавленная «Средство бессенсорного аффинного преобразования с наилучшей подгонкой для контроля перепада давления и расхода насоса», приоритет которой заявляется по дате подачи предварительной заявки на патент США №61/976,749, поданной 8 апреля 2014 года, в настоящее время отозванной; и
[7] Заявка на патент США №14/730,871 (номер патентного поверенного №911-019.015-2//F-B&G-X0013US01), поданная 4 июня 2015 года и озаглавленная «Система и настраиваемое на поток бессенсорное устройство управления откачкой для приложений энергосбережения при откачке», приоритет которой заявляется по дате подачи предварительной заявки на патент США №62/007,474, поданной 4 июня 2014 года, в настоящее время отозванной; и
[8] Заявка на патент США №14/969,723 (номер патентного поверенного №911-019.017-2//F-B&G-X0015US01), поданная 15 декабря 2015 года и озаглавленная «Преобразователь скорости потока дискретных клапанов», приоритет которой заявляется по дате подачи предварительной заявки на патент США №62/091,965, поданной 15 декабря 2014 года;
[9] Заявка на патент США №15/044,670, поданная 16 февраля 2016 года (номер патентного поверенного №911-019.019-2/F-B&G-X0016US), озаглавленная «Средства обнаружения для бессенсорных приложений управления насосами», приоритет которой заявляется по дате подачи предварительной заявки на патент США №62/116,031, поданной 13 февраля 2015 года, озаглавленной «Отсутствие средств обнаружения потока для бессенсорных приложений управления насосами»;
[10] Предварительная заявка на патент США №62/196,355, поданная 24 июля 2015 года, озаглавленная «Усовершенствованная система управления энергосберегающим насосом в режиме реального времени»;
[11] Предварительная заявка на патент США №62/341,767, поданная 26 мая 2016 года, озаглавленная «Прямой численный аффинный многоступенчатый бессенсорный преобразователь для насоса»;
[12] Предварительная заявка на патент США №62/343,352, поданная 31 мая 2016 года, озаглавленная «Инструментальные средства для расчета управления насосом для приложений откачки с переменной скоростью».
Все эти заявки являются заявками заявителя настоящей заявки на патент, и все они полностью включены посредством ссылки в настоящий документ.
Объем изобретения
Следует понимать, что, если не указано иное, любые признаки, характеристики, альтернативы или модификации, описанные в отношении конкретного варианта выполнения настоящего изобретения, могут также применяться, использоваться или быть включены в любой другой вариант выполнения, описанный в настоящем документе. Кроме того, чертежи в настоящем документе приведены не в масштабе.
Несмотря на то, что настоящее изобретение описано в качестве примера в отношении центробежного насоса, объем изобретения должен включать его использование в отношении насосов других типов или видов, которые теперь известны или будут разработаны позже.
Несмотря на то, что изобретение описано и проиллюстрировано в отношении иллюстративных вариантов его выполнения, могут быть предусмотрены вышеуказанные и различные другие добавления и опущения, не отступая от его сущности и объема.

Изобретение относится к насосной системе, содержащей насос, работающий от двигателя и контроллер насоса, имеющий процессор сигналов или модуль обработки сигналов, а также способу обработки сигнала с численным бессенсорным аффинным преобразованием для насоса, например, основанный на обработке перепада давления, расхода и мощности насоса на максимальной скорости насоса, опубликованных производителями насосов, а также закона аффинного преобразования насоса для получения мгновенных перепадов давления и расхода насоса напрямую и численно. Способ бессенсорного преобразования может быть применен к любым формам распределения характеристик насоса, простым или сложным, поскольку нет необходимости в реконструировании и решении любых характеристических уравнений насоса и системы. В результате точность вычислений значительно улучшается. 2 н. и 14 з.п. ф-лы, 11 ил.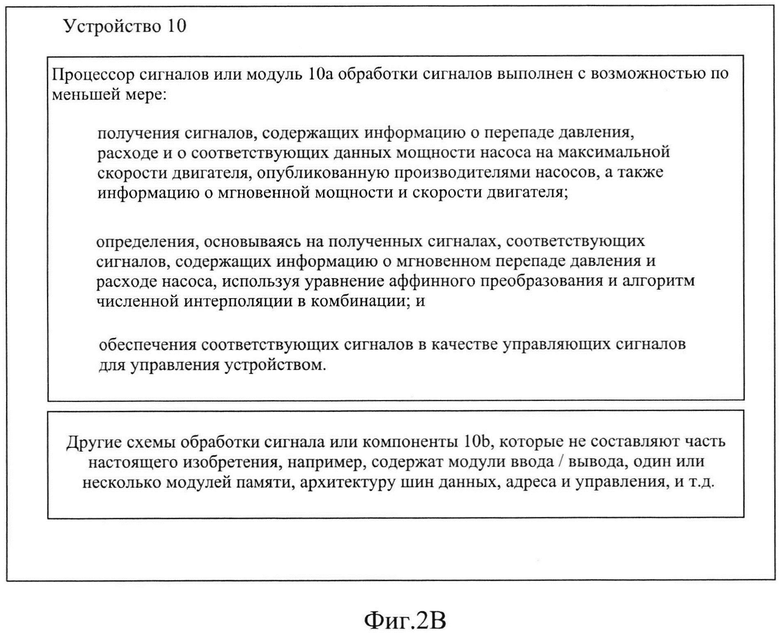
1. Насосная система, содержащая:
насос, работающий от двигателя, и
контроллер насоса, имеющий процессор сигналов или модуль обработки сигналов, выполненный с возможностью по меньшей мере:
получения сигналов, содержащих информацию о данных насоса, опубликованных производителем насоса, причем данные насоса включают перепад давления, расход и соответствующие данные мощности насоса при максимальной скорости двигателя, а также информацию о мгновенной мощности и скорости двигателя, и
определения, основываясь на полученных сигналах, соответствующих сигналов, содержащих информацию о мгновенном перепаде давления и расходе насоса, используя уравнение аффинного преобразования и алгоритм численной интерполяции в комбинации, для управления насосом в насосной системе.
2. Насосная система по п.1, в которой процессор сигналов или модуль обработки сигналов выполнен с возможностью обеспечения соответствующих сигналов в качестве управляющих сигналов для управления жидкостной насосной системой.
3. Насосная система по п.1, в которой процессор сигналов или модуль обработки сигналов выполнен с возможностью определения соответствующих сигналов путем использования уравнения аффинного преобразования и алгоритма численной интерполяции в комбинации следующим образом:
получения соответствующей максимальной мощности на максимальной скорости насоса в зависимости от мгновенных параметров мощности и скорости двигателя с использованием уравнения аффинного преобразования мощности,
получения соответствующего перепада давления и расхода насоса в зависимости от соответствующей максимальной мощности на максимальной скорости насоса с использованием прямой численной интерполяции, и
определения мгновенного перепада давления и расхода насоса в зависимости от мгновенной скорости и мощности двигателя с использованием уравнений аффинного преобразования для давления и расхода.
4. Насосная система по п.3, в которой процессор сигналов или модуль обработки сигналов выполнен с возможностью определения мгновенного перепада давления и расхода насоса путем использования уравнения аффинного преобразования и алгоритма численной интерполяции в комбинации и использования численных процедур расчета следующим образом:


где  и
и  представляют собой функции распределения перепада давления и расхода насоса в зависимости от мощности и сформулированы численно на основе дискретных данных (Pi, Qi, Wi) насоса при полной скорости двигателя, а
представляют собой функции распределения перепада давления и расхода насоса в зависимости от мощности и сформулированы численно на основе дискретных данных (Pi, Qi, Wi) насоса при полной скорости двигателя, а  представляют собой соответствующую функцию мощности при полной скорости насоса согласно уравнению аффинного преобразования мощности
представляют собой соответствующую функцию мощности при полной скорости насоса согласно уравнению аффинного преобразования мощности
 ,
,
где n представляет собой мгновенную скорость, а w представляет собой мощность двигателя.
5. Насосная система по п.1, которая содержит гидравлическую насосную систему, содержащую насос и контроллер насоса, причем контроллер насоса выполнен с процессором сигналов или модулем обработки сигналов для управления насосом.
6. Насосная система по п.1, в которой указанный насос представляет собой один насос, циркулятор, группу параллельных сопряженных насосов или циркуляторов, группу последовательных сопряженных насосов или циркуляторов, или некоторую их комбинацию.
7. Насосная система по п.2, в которой насосная жидкостная система содержит замкнутую или открытую насосную жидкостную систему, включая основную насосную систему, вспомогательную насосную систему, систему циркуляции воды и систему повышения давления.
8. Насосная система по п.7, в которой замкнутая или открытая насосная жидкостная система содержит одну зону или несколько зон.
9. Способ управления насосом, работающим от двигателя, в насосной системе, включающий:
получение в контроллере насоса, содержащем процессор сигналов или модуль обработки сигналов, сигналов, содержащих информацию о данных насоса, опубликованных производителем насоса, причем данные насоса включают перепад давления, расход и соответствующие данные мощности насоса при максимальной скорости двигателя, а также информацию о мгновенной мощности и скорости двигателя, и
определение, в процессоре сигналов или в модуле обработки сигналов, основываясь на полученных сигналах, соответствующих сигналов, содержащих информацию о мгновенном перепаде давления и расходе насоса, используя уравнение аффинного преобразования и алгоритм численной интерполяции в комбинации, для управления насосом в насосной системе.
10. Способ по п.9, в котором от процессора сигналов или модуля обработки сигналов получают соответствующие сигналы в качестве управляющих сигналов для управления жидкостной насосной системой.
11. Способ по п.9, в котором в процессоре сигналов или в модуле обработки сигналов определяют соответствующие сигналы путем использования уравнения аффинного преобразования и алгоритма численной интерполяции в комбинации следующим образом:
получают соответствующую максимальную мощность на максимальной скорости насоса в зависимости от мгновенных параметров мощности и скорости двигателя с использованием уравнения аффинного преобразования мощности,
получают соответствующий перепад давления и расход насоса в зависимости от соответствующей максимальной мощности на максимальной скорости насоса с использованием прямой численной интерполяции, и
определяют мгновенный перепад давления и расход насоса в зависимости от мгновенной скорости и мощности двигателя с использованием уравнений аффинного преобразования для давления и расхода.
12. Способ по п.11, в котором в процессоре сигналов или в модуле обработки сигналов определяют мгновенный перепад давления и расход насоса путем использования уравнения аффинного преобразования и алгоритма численной интерполяции в комбинации и использования численных процедур расчета следующим образом:
где и представляют собой функции распределения перепада давления и расхода насоса в зависимости от мощности и сформулированы численно на основе дискретных данных (Pi, Qi, Wi) насоса при полной скорости двигателя, а представляют собой соответствующую функцию мощности при полной скорости насоса согласно уравнению аффинного преобразования мощности
,
где n представляет собой мгновенную скорость, а w представляет собой мощность двигателя.
13. Способ по п.9, в котором насосную систему выполняют как гидравлическую насосную систему, содержащую насос и контроллер насоса для управления насосом.
14. Способ по п.9, в котором насос выполняют как один насос, циркулятор, группу параллельных сопряженных насосов или циркуляторов, группу последовательных сопряженных насосов или циркуляторов, или некоторую их комбинацию.
15. Способ по п.10, в котором насосную жидкостную систему выполняют как замкнутую или открытую насосную жидкостную систему, включая основную насосную систему, вспомогательную насосную систему, систему циркуляции воды и систему повышения давления.
16. Способ по п.15, в котором замкнутую или открытую насосную жидкостную систему выполняют как содержащую одну зону или несколько зон.
| US 20140288716 A1 25.09.2014 | |||
| US 20030091443 A1, 15.05.2003 | |||
| US 20130204546 A1, 08.08.2013 | |||
| US 20110200454 A1, 18.08.2011 | |||
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ПРИЗНАКОВ ЗАМЕДЛЕНИЯ И ПОМПАЖА КОМПРЕССОРА | 2003 |
|
RU2326271C2 |

