Ссылка на родственную заявку
Данная заявка ссылается на приоритет предварительной заявки на патент США №62/346808 (документ поверенного №911-019.027-1/F-B&G-X0022US), поданной 7 июня 2016 года, которая полностью включена в данное описание путем ссылки на соответствующий источник.
Предпосылки создания изобретения
1. Область техники, к которой относится изобретение
Настоящее изобретение относится к технике управления насосом; и, более конкретно, относится к технике управления насосом в системе насосов.
2. Краткое описание предшествующего уровня техники
В более ранних работах одного или нескольких авторов настоящей заявки по бессенсорному управлению и контролю гидравлической насосной системы дискретный численной бессенсорный преобразователь, основанный на трех (3) распределенных массивах давления, подачи насоса и мощности двигателя в зависимости от частоты вращения двигателя и коэффициента характеристик системы, так называемый трехмерный (3D) бессенсорный преобразователь, был разработан и раскрыт в документах [1-4], указанных ниже. Основные компоненты трехмерного бессенсорного преобразователя состоят из трех (3) функций поверхностей дискретного распределения подачи насоса, перепада давления на насосе и мощности двигателя по отношению к частоте вращения двигателя и коэффициенту характеристик эквивалентной системы, измеренных у насосной системы, соответственно, и процедур преобразования и алгоритмов для получения соответствующих значений давления и подачи насоса из заданной пары частоты вращения и мощности двигателя. В ранее раскрытом трехмерном бессенсорном преобразователе процедура преобразования состоит в том, чтобы сначала вывести коэффициент системы из функции поверхности мощности относительно частоты вращения двигателя и коэффициента системы с заданной парой значений мощности и частоты вращения двигателя. Давление и подача насоса затем могут быть получены из поверхностей давления и подачи относительно частоты вращения двигателя и коэффициента системы с парой известных значений частоты вращения двигателя и коэффициента системы. Билинейная интерполяция используется для вычисления этих необходимых значений. Точность преобразования с использованием бессенсорной модели, представленной с использованием раскрытой методики, является удовлетворительной, особенно в области работы насоса выше частоты вращения двигателя 36 Гц. Однако при более низких частотах вращения двигателя, когда проскальзывание насоса может происходить с изменением кривизны этих поверхностей немного больше, алгоритм билинейной инверсии может немного потерять точность.
Ссылки [1-4] включают заявки на патенты, а именно:
[1] заявку на патент США с порядковым номером 14/091795 (документ поверенного №911-019.009-2//F-B&G-X0005), подана 27 ноября 2013 г., под названием "3D sensorless conversion method and apparatus", которая испрашивает приоритет по предварительной заявке США №61/771375, поданной 1 марта 2013 г., в настоящее время отмененной;
[2] заявку на патент США с порядковым номером 14/187817 (документ поверенного №911-019.010-2//F-B&G-X0008), подана 24 февраля 2014 г., под названием "A Mixed Theoretical And Discrete Sensorless Converter For Pump Differential Pressure And Flow Monitoring", которая испрашивает приоритет по предварительной заявке США №61/803258, поданной 19 марта 2013 г., в настоящее время отмененной;
[3] заявку на патент США с порядковым номером 14/339594 (документ поверенного №911-019.012-2//F-B&G-X0010US01), подана 24 июля 2014 г., под названием "Sensorless Adaptive Pump Control with Self-Calibration Apparatus for Hydronic Pumping System", которая испрашивает приоритет по предварительной заявке США с порядковым номером 61/858237, поданной 25 июля 2013 г., в настоящее время отмененной;
[4] заявку США с порядковым номером 15/173781 (документ поверенного №911-019.020-2//F-B&G-X0020US01), подана 6 июня 2016 г., под названием "Direct numeric affinity pumps sensorless converter", которая испрашивает приоритет по предварительной заявке США с порядковым номером 62/170997, поданный 4 июня 2015 г., в настоящее время отмененной;
которые все включены в описание путем ссылки на соответствующие источники.
Настоящее изобретение основано на этом семействе технологий, раскрытых в вышеупомянутых родственных заявках, указанных в настоящем документе.
Сущность изобретения
Вкратце, согласно настоящему изобретению предлагается новая процедура и алгоритм прямого численного трехмерного бессенсорного преобразования для насоса, например, с использованием численной интерполяции более высокого порядка и процедуры более прямого численного преобразования, соответственно, например, для повышения точности преобразования в области(-ях) работы с низкой частотой вращения насоса(-ов) в насосной системе. В качестве примера, первые три (3) соответствующих дискретных массива в отношении дискретной частоты вращения двигателя для каждой позиции системы при частоте вращения двигателя могут быть получены из трехмерных поверхностей дискретного распределения мощности двигателя, перепада давления на насосе и подачи насоса посредством численной интерполяции соответственно. Давление насоса и подача на частоте вращения для соответствующего измеренного значения мощности могут затем быть получены непосредственно путем численной интерполяции на основе трех (3) соответствующих дискретных массивов. Точность преобразования повышается, с погрешностью около 5% в жидкостной области нормальной работы насоса.
Конкретные формы осуществления изобретения
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать форму способа или устройства, например, в контроллере для насоса или насосной системы, имеющем процессор или модуль обработки сигналов, сконфигурированный для:
приема сигнализации, содержащей информацию о трех соответствующих дискретных массивах относительно дискретной частоты вращения двигателя для каждой позиции системы при частоте вращения двигателя, полученной из поверхностей трехмерных дискретных распределений мощности двигателя, перепада давления на насосе и подачи посредством соответствующих численных интерполяций; а также
определения соответствующей сигнализации, содержащей информацию для управления насосом или насосами в системе насосов, или системой насосов, на основе соответствующего перепада давления на насосе и подачи насоса при частоте вращения двигателя для соответствующего измеренного значения мощности, определяемых с помощью численной интерполяции трех соответствующих дискретных массивов и принимаемой сигнализации.
Согласно некоторым формам осуществления настоящее изобретение может включать в себя один или несколько из следующих признаков:
Процессор или модуль обработки сигналов могут быть выполнены с возможностью предоставления соответствующей сигнализации в качестве управляющей сигнализации для управления устройством, например, которое может принимать форму или включать в себя насос один или несколько насосов в системе насосов или систему насосов.
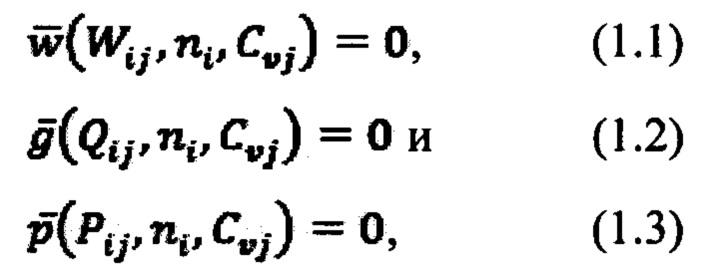
В качестве примера, процессор или модуль обработки сигналов могут быть выполнены с возможностью реализации функций трехмерного дискретного распределения мощности двигателя, подачи и перепада давления на насосе относительно дискретной частоты вращения двигателя для каждой позиции системы, которые включают в себя или принимают форму следующих уравнений:
где функции  являются функциями двумерного дискретного численного распределения относительно дискретной частоты вращения двигателя ni и позиции системы Cvj, на основе массивов трехмерных дискретных данных насоса (Рij, Qij, Wij), где i=1, 2, … M и j=1, 2, …, М, соответственно.
являются функциями двумерного дискретного численного распределения относительно дискретной частоты вращения двигателя ni и позиции системы Cvj, на основе массивов трехмерных дискретных данных насоса (Рij, Qij, Wij), где i=1, 2, … M и j=1, 2, …, М, соответственно.
В качестве дополнительного примера процессор сигналов может быть сконфигурирован для определения дискретной мощности двигателя, подачи насоса и перепада давления на насосе wj, qj и pj при заданной частоте вращения двигателя n, например, путем численной интерполяции по отношению к дискретной частоте вращения двигателя ni в каждой дискретной позиции системы Cvj с j=1, 2, …, М, соответственно, в виде уравнений следующим образом:
где  - функции дискретного численного распределения относительно дискретной частоты вращения двигателя ni, основанные на массивах трехмерных дискретных данных насоса (Pij, Qij, Wij}.
- функции дискретного численного распределения относительно дискретной частоты вращения двигателя ni, основанные на массивах трехмерных дискретных данных насоса (Pij, Qij, Wij}.
В качестве еще одного примера, при численной интерполяции точек трех (3) дискретных массивов wj, qj и pj, соответствующие давление и подача насоса для мощности двигателя w при частоте вращения двигателя n могут быть представлены уравнениями следующим образом:
где  - функции численного распределения перепада давления на насосе, подачи насоса и коэффициента системы по отношению к соответствующей мощности двигателя
- функции численного распределения перепада давления на насосе, подачи насоса и коэффициента системы по отношению к соответствующей мощности двигателя  или w при частоте вращения двигателя n.
или w при частоте вращения двигателя n.
Устройство может включать в себя или принимать форму контроллера, контроллера насоса или контроллера насосной системы, сконфигурированного с процессором или модулем обработки сигналов для управления насосом, или одним или несколькими насосами в системе насосов, или системой насосов, например, включая систему насосов в гидравлической насосной системе.
Устройство может включать в себя или принимать форму насоса в такой системе насосов, имеющей такой контроллер, в том числе там, где контроллер сконфигурирован с процессором или модулем обработки сигналов для управления насосом, например, в том числе там, где система насосов включает или принимает форму гидравлической насосной системы.
В качестве примера процессор или модуль обработки сигналов могут включать в себя или принимать форму по меньшей мере одного процессора сигналов и по меньшей мере одной памяти, включающей код компьютерной программы, и по меньшей мере одна память и код компьютерной программы сконфигурированы по меньшей мере с одним процессором сигналов так, чтобы заставлять процессор сигналов по меньшей мере принимать сигнализацию и определять соответствующую сигнализацию и принятую сигнализацию. Процессор или модуль обработки сигналов могут быть сконфигурированы с подходящим кодом компьютерной программы для реализации подходящих алгоритмов обработки сигналов и/или функций в соответствии с изложенным в данном документе. Специалистам в данной области техники будет понятно, как реализовать любой такой код компьютерной программы для выполнения функций обработки сигналов, изложенных в данном документе, без излишних экспериментов, на основании того, что раскрыто в настоящей заявке на патент.
Согласно некоторым формам осуществления настоящее изобретение также может принимать форму способа, включающего в себя этапы для:
приема в процессоре или модуле обработки сигналов сигнализации, содержащей информацию о трех соответствующих дискретных массивах относительно дискретной частоты вращения двигателя для каждой позиции системы при частоте вращения двигателя, полученной из трехмерных поверхностей дискретных распределений мощности двигателя, перепада давления на насосе и подачи с помощью соответствующих численных интерполяций; и
определения в процессоре или модуле обработки сигналов соответствующей сигнализации, содержащей информацию для управления насосом или насосами в системе насосов, или системой насосов, на основе соответствующего перепада давления на насосе и подачи насоса при частоте вращения двигателя для соответствующего измеренного значения мощности, определяемых с использованием численной интерполяции трех соответствующих дискретных массивов и принимаемой сигнализации.
Способ также может включать в себя один или несколько признаков, изложенных в данном документе, включая предоставление от процессора или модуля обработки сигналов соответствующей сигнализации в качестве управляющей сигнализации для управления насосом, одним или несколькими насосами в системе насосов, или системой насосов, например, в соответствии с изложенным в данном документе.
Данное изобретение предлагает новую технологию, которая основана на вышеупомянутом семействе технологий, изложенных в данном документе, и является их дальнейшим развитием.
Краткое описание чертежей
Чертежи содержат следующие фигуры, которые не обязательно выполнены в масштабе:
На фиг. 1 показан бессенсорный преобразователь для насосной системы.
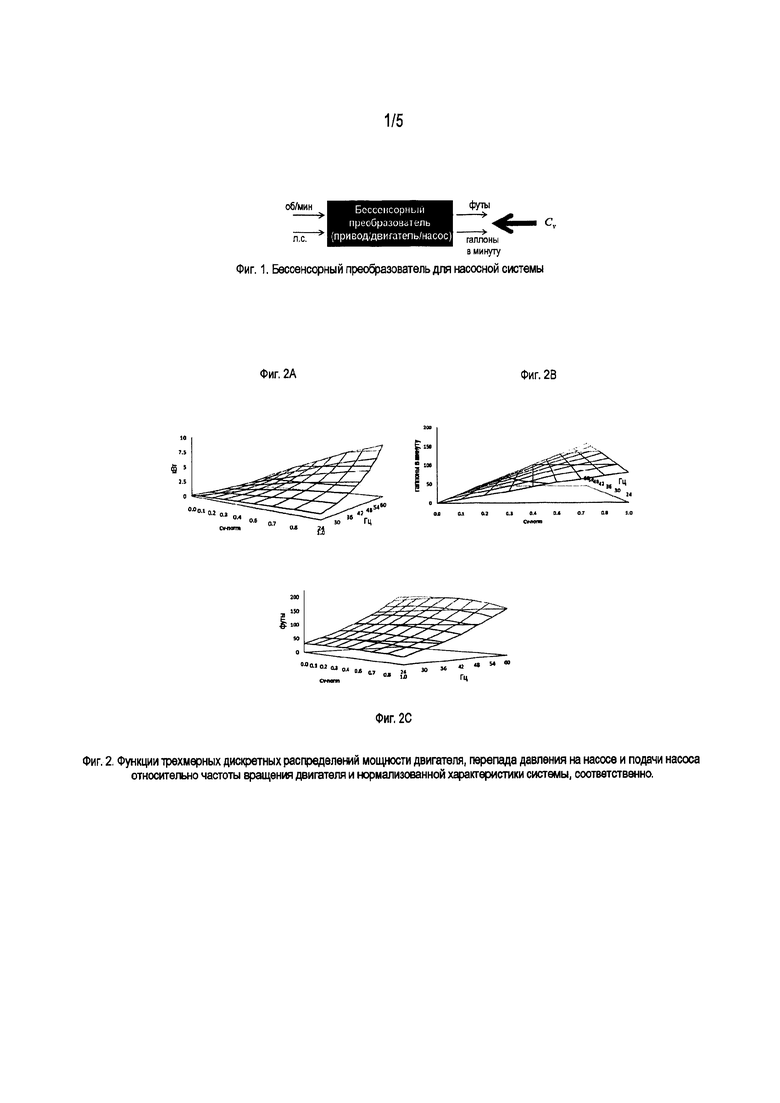
Фиг. 2 включает в себя фиг. 2А-2С, на которых показаны трехмерные функции дискретного распределения мощности двигателя, перепада давления на насосе и подачи относительно частоты вращения двигателя (Гц) и нормированных характеристик системы (Cv_norm), соответственно, где фиг. 2А представляет собой график мощности двигателя (кВт), фиг. 2В - график давления (напора) (футы, ft); и фиг. 2С - график подачи насоса (галлонов в минуту, gpm).
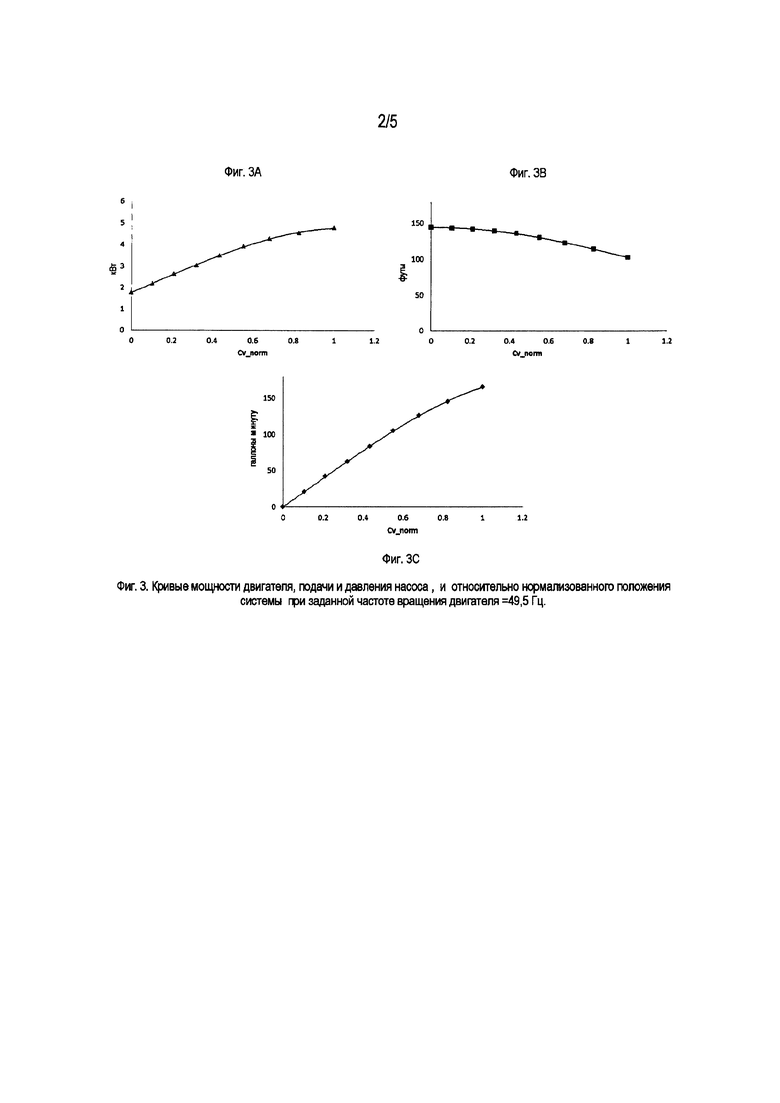
Фиг. 3 включает в себя фиг. 3А-3С, на которых показаны кривые мощности двигателя, подачи насоса и давления wj, qj и pj относительно нормализованного положения системы Cv_norm при заданной частоте вращения двигателя n=49,5 Гц, где фиг. 3А представляет собой график мощности двигателя (кВт), фиг. 3В - график давления (напора) (футы); и фиг. 3С - график подачи насоса (галлонов в минуту).
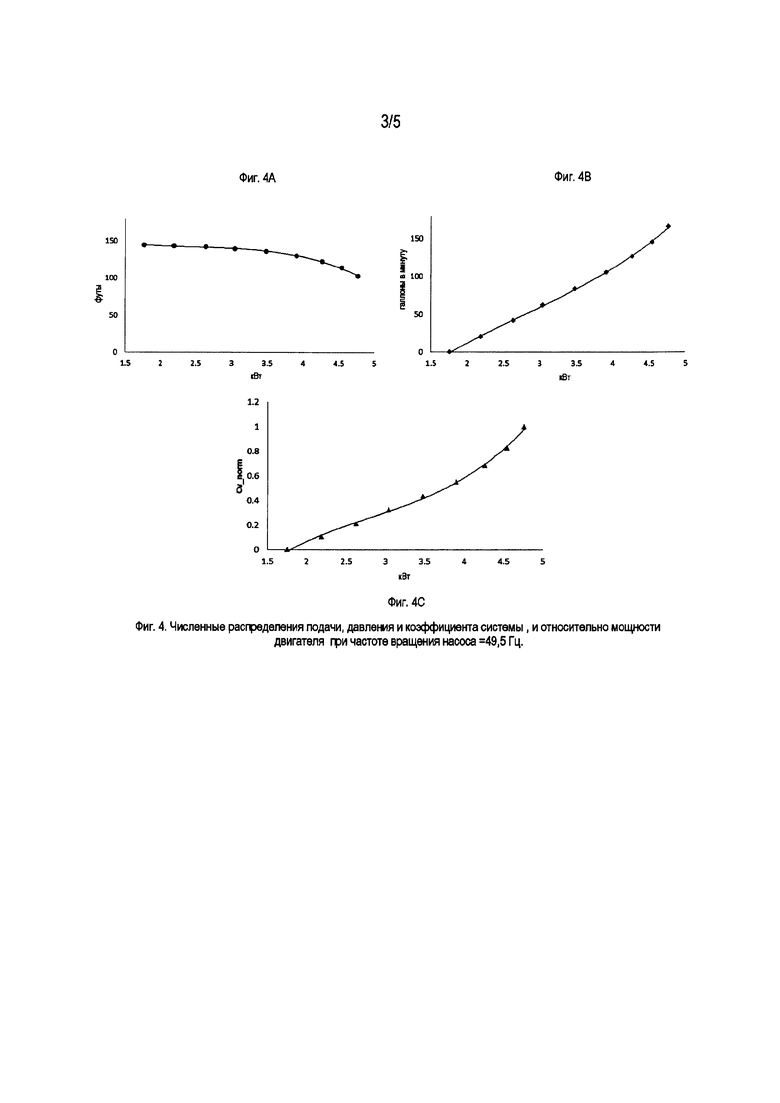
Фиг. 4 включает в себя фиг. 4А-4С, на которых показаны численные распределения подачи, давления и коэффициента системы  относительно мощности двигателя w при заданной частоте вращения двигателя n=49,5 Гц, где фиг. 4А представляет собой график зависимости давления (напора) (фут) от мощности двигателя (кВт), фиг. 4В - график зависимости подачи (галлонов в минуту) от мощности двигателя (кВт); и фиг. 4С - график нормированных характеристик системы (Cv_norm) в зависимости от мощности двигателя (кВт).
относительно мощности двигателя w при заданной частоте вращения двигателя n=49,5 Гц, где фиг. 4А представляет собой график зависимости давления (напора) (фут) от мощности двигателя (кВт), фиг. 4В - график зависимости подачи (галлонов в минуту) от мощности двигателя (кВт); и фиг. 4С - график нормированных характеристик системы (Cv_norm) в зависимости от мощности двигателя (кВт).
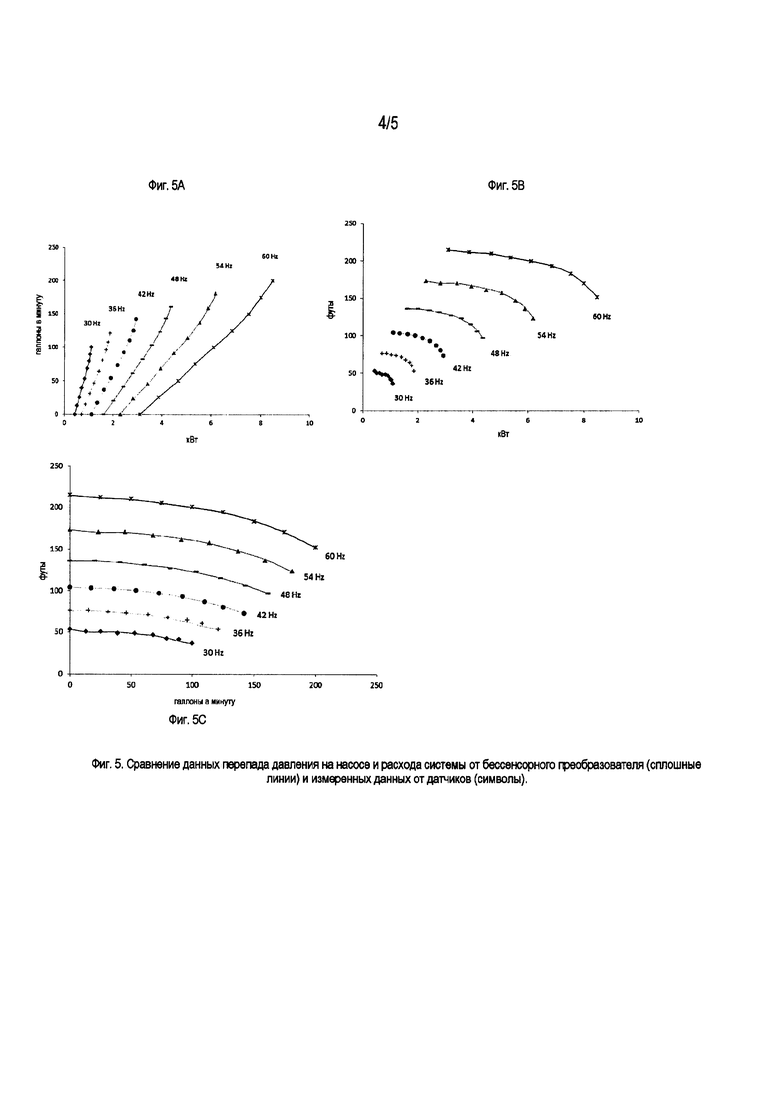
Фиг. 5 включает в себя фиг. 5А-5С, на которых показаны сравнения перепада давления на насосе и расхода системы от бессенсорного преобразователя (сплошные линии) и измеренных данных от датчиков (символы, например, включая ромбики, знаки плюс (+), кружки, тире, треугольники и буквы х) для частоты вращения насоса 30, 36, 42, 48, 54 и 60 Гц, соответственно, где фиг. 5А представляет собой график зависимости подачи (галлонов в минуту) от мощности двигателя (кВт), фиг. 5В - график зависимости давления (напора) (футов) от мощности двигателя (кВт); и фиг. 5С - график давления (напора) (футов в зависимости от подачи (галлонов в минуту)).
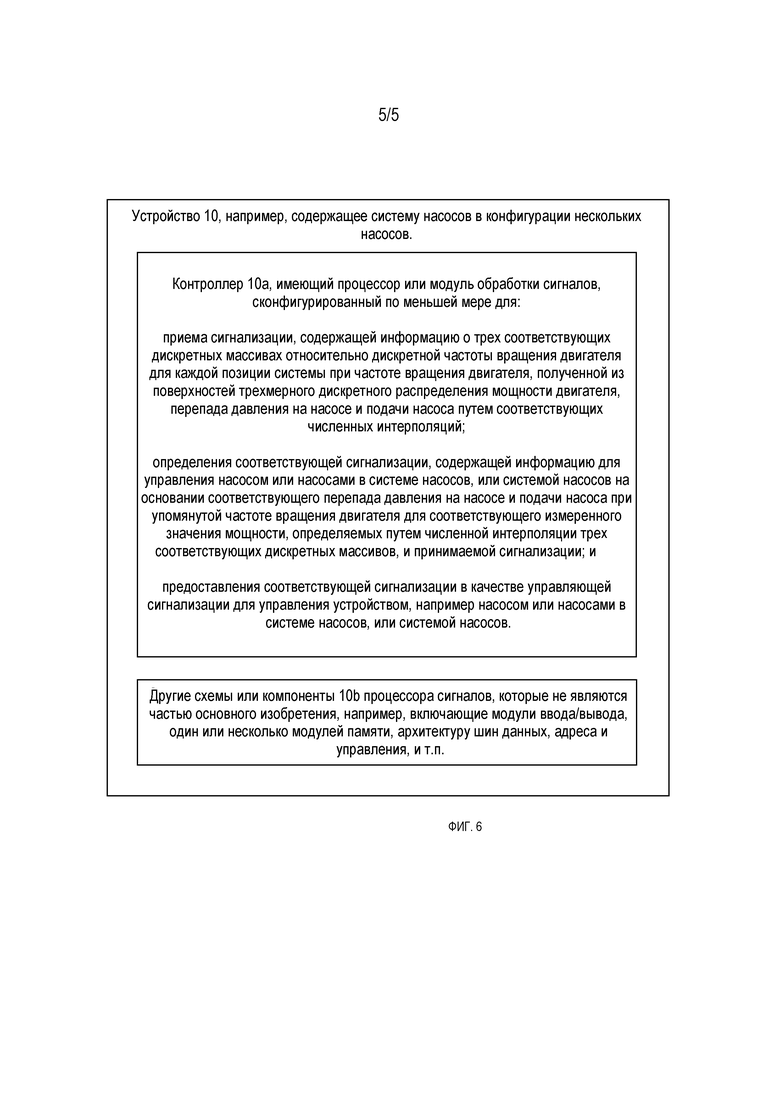
Фиг. 6 представляет собой блок-схему устройства, например, имеющего контроллер со сконфигурированным в нем процессором или модулем обработки сигналов в соответствии с некоторыми формами осуществления настоящего изобретения.
Подробное описание изобретения
В соответствии с настоящим изобретением изложены альтернативные процедуры и алгоритмы трехмерного дискретного цифрового численного бессенсорного преобразования для насоса, например, с помощью численной интерполяции более высокого порядка, и процедуры прямого численного преобразования, соответственно, для повышения точности преобразования в области(-ях) работы насоса с малой частотой вращения.
Прямой численный метод для трехмерного дискретного преобразования В соответствии с тем, что раскрыто в источнике [1], для бессенсорного преобразователя, схематично показанного на фиг. 1, три (3) поверхности (3D) дискретного распределения измеренных значений мощности двигателя, перепада давления на насосе, подачи относительно гидравлических характеристик системы и частоты вращения двигателя могут быть получены из данных измерений или так называемых калибровочных данных и представлены или показаны на фиг. 2.
Для получения перепада давления и подачи насоса в положении системы на основе пары заданной частоты вращения и мощности двигателя в настоящем документе изложен подход прямого численного бессенсорного преобразования для трехмерного дискретного бессенсорного преобразования. Например, сначала при частоте вращения двигателя, например, при 49,5 Гц, три (3) соответствующие кривые или массивы дискретных данных в каждой дискретной позиции системы могут быть получены из трех (3) поверхностей дискретного распределения мощности, давления и подачи путем численной интерполяции по отношению к дискретной частоте вращения двигателя, соответственно. Три (3) массива полученных данных затем могут быть преобразованы в давление и расход относительно мощности и сформулированы в виде их соответствующих функций интерполяции. Следовательно, давление и подача насоса для заданного значения мощности при частоте вращения, например, 49,5 Гц, могут затем быть получены непосредственно с помощью численной интерполяция.
Численное представление с помощью процедур бессенсорного преобразования, представленных в настоящем документе, может быть представлено математически путем ссылки на прямой численный подход в источнике [4] следующим образом. Во-первых, трехмерные функции дискретного распределения мощности двигателя, подачи насоса, а также перепада давления относительно частоты вращения двигателя и положения системы могут быть представлены следующим образом:
где функции  являются двумерными функциями дискретного численного распределения относительно дискретной частоты вращения двигателя ni и позиции системы Cvj, на основе массивов трехмерных дискретных данных насоса (Pij, Qij, Wij), где i=1, 2, … N и j=1, 2, …, М, соответственно.
являются двумерными функциями дискретного численного распределения относительно дискретной частоты вращения двигателя ni и позиции системы Cvj, на основе массивов трехмерных дискретных данных насоса (Pij, Qij, Wij), где i=1, 2, … N и j=1, 2, …, М, соответственно.
Дискретные мощность двигателя, подачу насоса и перепад давления wj, qj и pj при заданной частоте вращения двигателя n можно получить путем численной интерполяции по отношению к дискретной частоте вращения двигателя ni в каждой дискретной позиции системы Cvj с j=1, 2, …, М, соответственно, в виде уравнений, следующим образом:

где - функции дискретного численного распределения относительно дискретной частоты вращения двигателя ni, основанные на массивах трехмерных дискретных данных насоса (Рij, Qij, Wij), показанных на фиг. 3, соответственно.
Путем численной интерполяции точек wj, qj и pj 3 дискретных массивов давление и подача насоса для мощности двигателя w при частоте вращения двигателя n могут быть представлена следующим образом:
где  - функции численного распределения перепада давления на насосе, подачи насоса и коэффициента системы по отношению к соответствующей мощности двигателя
- функции численного распределения перепада давления на насосе, подачи насоса и коэффициента системы по отношению к соответствующей мощности двигателя  или w при частоте вращения двигателя n, показанные на фиг. 4, соответственно.
или w при частоте вращения двигателя n, показанные на фиг. 4, соответственно.
Функции распределения 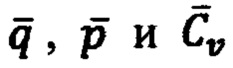 могут быть сформулированы посредством любых численных средств или методов, например, с использованием интерполяции или приближения кривой. Однако для немного более сложных распределений может быть рекомендована кусочная численная интерполяция для достижения лучшего функционального представления и желаемой точности. Обратите внимание, что требуется монотонное распределение по мощности относительно потока.
могут быть сформулированы посредством любых численных средств или методов, например, с использованием интерполяции или приближения кривой. Однако для немного более сложных распределений может быть рекомендована кусочная численная интерполяция для достижения лучшего функционального представления и желаемой точности. Обратите внимание, что требуется монотонное распределение по мощности относительно потока.
Используя алгоритмы прямого численного трехмерного бессенсорного преобразования, определенные в уравнении (3), значения перепада давления и подачи насоса могут быть рассчитаны для насосной системы и сопоставлены с измеренными данными, которые показаны на фиг. 5, соответственно. Точность преобразования является удовлетворительной с погрешностью менее 5% в пределах жидкостной области нормальной работы насоса.
Раскрытый в настоящем документе прямой численный бессенсорный преобразователь насоса сформулирован и определен численно на основе данных о характеристиках мощности, измеренных непосредственно с удовлетворительной точностью для большинства применений управления насосами и применениям мониторинга. Эта техника может быть применена к любой форме распределения характеристик насоса, простого или сложного насоса, при условии, что сохраняется монотонное распределение мощности относительно расхода.
Фиг. 6: Реализация функциональных возможностей обработки сигналов
В качестве дополнительного примера на фиг. 6 показано устройство 10 в соответствии с некоторыми формами осуществления настоящего изобретения для реализации соответствующих функциональных возможностей обработки сигналов, раскрытых в данном документе. Устройство содержит контроллер 10а, имеющий процессор или модуль обработки сигналов, сконфигурированный по меньшей мере для того, чтобы:
принимать сигнализацию, содержащую информацию о трех соответствующих дискретных массивах относительно дискретной частоты вращения двигателя для каждой позиции системы при частоте вращения двигателя, полученной из трехмерных поверхностей дискретного распределения мощности двигателя, перепада давления на насосе и подачи насоса путем соответствующих численных интерполяций; и
определять соответствующую сигнализацию, содержащую информацию для управления насосом или насосами в системе насосов, или системой насосов на основании соответствующего перепада давления на насосе и подачи насоса при частоте вращения двигателя для соответствующего измеренного значения мощности, определяемых путем численной интерполяции трех соответствующих дискретных массивов, и принимаемой сигнализации.
Во время работы процессор или модуль обработки сигналов могут быть сконфигурированы для обеспечения соответствующей сигнализации в качестве управляющей сигнализации для управления насосом или системой насосов, например, такой как система насосов в жидкостной насосной системе. В качестве примера соответствующая сигнализация может использоваться также для управления жидкостной насосной системой.
Процессор или модуль обработки сигналов может быть сконфигурирован или, например, являться частью, например, такого контроллера, такой системы, имеющей насосы с таким контроллером, и/или системы жидкостных насосов, имеющей насосы с таким контроллером, например, которая может содержать один или несколькими других сконфигурированных в ней контроллеров или применяться совместно с ними. В качестве примера предусмотрены формы осуществления, в которых устройство представляет собой или принимает форму насоса или одного или нескольких насосов в системе насосов, или системы насосов.
В качестве примера, функциональные возможности устройства 10 могут быть реализованы с использованием аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения или их комбинации. В типичной программной реализации устройство 10 будет содержать одну или несколько микропроцессорных архитектур, имеющих, например, по меньшей мере один процессор сигналов или подобный микропроцессору элемент. Специалист в данной области техники сможет запрограммировать с помощью подходящего программного кода такую реализацию на основе микроконтроллера или на основе микропроцессора для выполнения функций, описанных в данном документе, без излишних экспериментов. Например, процессор или модуль обработки сигналов могут быть сконфигурированы, например, специалистом в данной области техники, без ненужных экспериментов для приема сигнализации, содержащей информацию о трех соответствующих дискретных массивах в отношении дискретной частоты вращения двигателя для каждой позиции системы при частоте вращения двигателя частоте вращения, полученной из трехмерных поверхностей дискретного распределения мощности двигателя, перепада давления на насосе и подачи насоса посредством соответствующих численных интерполяций, в соответствии с тем, что раскрыто в данном документе.
Кроме того, процессор или модуль обработки сигналов может быть сконфигурирован, например, специалистом в данной области техники, без ненужных экспериментов для определения соответствующей сигнализации, содержащей информацию для управления насосом или насосами в системе насосов, или системой насосов на основе соответствующего перепаде давления на насосе и подачи насоса при частоте вращения двигателя для соответствующего измеренного значения мощности, определенных с использованием численной интерполяции трех соответствующих дискретных массивов и принятой сигнализации, в соответствии тем, что раскрыто в данном документе.
Объем изобретения не предназначен быть ограниченным какой-либо конкретной реализацией с использованием техники, уже известной или разработанной в будущем. Предполагается, что объем изобретения включает реализацию функциональных возможностей процессоров в качестве автономного процессора, процессора сигналов или модуля процессора сигналов, а также отдельного процессора или модулей процессоров, а также некоторой их комбинации.
Устройство 10 также может содержать, например, другие схемы или компоненты 10b процессора сигналов, включая, например, оперативное запоминающее устройство (Random Access Memory, RAM) и/или постоянное запоминающее устройство (Read Only Memory, ROM), устройства ввода-вывода и управления, и шины данных и адресные шины, соединяющие их, и/или по меньшей мере один входной процессор и по меньшей мере один выходной процессор, что будет понятно специалистам в данной области техники.
Различные элементы новизны
Настоящее изобретение также может включать или принимать форму одной или нескольких из следующих форм осуществления/реализаций:
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать форму реализаций, в которых технология прямого численного трехмерного бессенсорного преобразователя для управления и контроля насосной системы может содержать бессенсорный преобразователь перекачки, который выдает перепад давления на насосе и подачу насоса, связанные с динамической системой в отношении частоты вращения двигателя и измеренных значений мощности на основе данных калибровки насоса и двигателя 3 поверхностей дискретного распределения мощности двигателя, перепада давления на насосе и его подачи. Основные компоненты прямого численного трехмерного бессенсорного преобразователя могут включать в себя 3 функции поверхностей дискретного распределения подачи насоса, перепада давления на насосе и мощности двигателя по отношению к частоте вращения двигателя и коэффициенту характеристик эквивалентной системы, измеренным из насосной системы, соответственно, и процедуры преобразования и алгоритмы для получения соответствующих значений давления и подачи насоса из заданной пары частоты вращения и мощности двигателя, например, в соответствии с изложенным здесь. В составе раскрытого здесь подхода прямого численного трехмерного бессенсорного преобразования предусмотрены процедуры прямого численного преобразования и соответствующая численная интерполяция, чтобы повысить точность преобразования в области(-ях) работы с низкой частотой вращения. Эта технология может применяться к любой форме распределений характеристик насоса, при условии, что сохраняется монотонное распределение мощности относительно расхода.
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать форму реализаций, где технология прямого численного трехмерного бессенсорного преобразователя, раскрытая в данном документе, может также включать в себя функции прямого численного распределения перепада давления на насосе, подачи насоса, мощности двигателя и коэффициента системы, представленные в уравнениях 2-3, а также на фиг. 3 и 4, которые отделены и реконструированы из модели преобразования между давлением и подачей насоса, электрической мощностью и частотой вращения двигателя для жидкостной насосной системы, как показано на фиг. 2 или представлено уравнением 1. В соответствии с процедурами прямого численного преобразования, раскрытыми в данном документе, нет необходимости иметь коэффициент характеристик системы, который сначала должен быть обратно преобразован из функции распределения мощности для получения давления и подачи насоса, а также может использоваться численная интерполяция более высокого порядка, так что точность бессенсорного преобразования перекачки в области(-ях) работы с низкой частотой вращения может быть соответственно улучшена.
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать форму реализаций, в которых прямые численные процедуры в технологии прямого численного трехмерного бессенсорного преобразователя, раскрытые в данном документе, могут включать в себя:
1) три (3) соответствующих дискретных массива по отношению к дискретной частоте вращения двигателя для каждой позиции системы при частоте вращения двигателя, представленной в уравнении 2 и на фиг. 3, могут быть получены из поверхностей трехмерного дискретного распределения мощности двигателя, перепада давления на насосе и подачи посредством численной интерполяции, соответственно, и
2) соответствующие давление и подача насоса при упомянутой частоте вращения для значения мощности, представленной в формуле 3 и на фиг. 4, могут быть получены непосредственно путем численной интерполяции на основе трех соответствующих дискретных массивов.
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать форму реализаций, в которых численные методы в технологии прямого численного трехмерного бессенсорного преобразователя, раскрытого в данном документе, могут включать в себя любые виды алгоритмов численной интерполяции и приближения для получения соответствующего перепада давления на насосе и его подачи. Однако для небольших или чуть менее сложных распределений для достижения лучшего функционального представления и точности может быть рекомендована кусочная численная интерполяция.
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать форму реализаций, в которых численное преобразование коэффициента характеристик системы в раскрытой здесь технологии прямого численного трехмерного бессенсорного преобразователя может включать в себя численную функцию коэффициента характеристик системы в виде  в уравнении 3.3, которая является распределением коэффициента системы по отношению к мощности двигателя. Для данного значения мощности двигателя, мгновенный коэффициент системы может быть получен по формуле 3.3 напрямую и численно с помощью алгоритмов интерполяции или приближения.
в уравнении 3.3, которая является распределением коэффициента системы по отношению к мощности двигателя. Для данного значения мощности двигателя, мгновенный коэффициент системы может быть получен по формуле 3.3 напрямую и численно с помощью алгоритмов интерполяции или приближения.
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать форму реализаций, в которых данные мощности двигателя в технологии прямого численного трехмерного бессенсорного преобразователя, раскрытой в данном документе выше, могут также включать в себя данные о мощности двигателя, измеренные изготовителями насосов или заказчиками применения. Здесь данные о мощности двигателя также могут быть заменены любыми возможными электрическими или механическими сигналами измеряемых значений двигателя, такими как ток или крутящий момент двигателя и тому подобными.
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать форму реализаций, в которых насосная жидкостная система, описанная в настоящем документе, с технологией прямого численного трехмерного бессенсорного преобразователя, может включать или использоваться в сочетании с жидкостными насосными системами с замкнутым или разомкнутым контуром, такими как первичные насосные системы, вторичные насосные системы, оборотные системы водоснабжения и системы повышения давления. Системы, раскрытые здесь, могут также состоять из одной зоны или нескольких зон.
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать форму реализаций, в которых упомянутые выше гидравлические сигналы в технологии прямого численного трехмерного бессенсорного преобразователя могут включать в себя перепад давления на насосе, давление в системе или давление в зоне, расход в системе или зоне и тому подобное.
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать форму реализаций, в которых управляющие сигналы или технологии передачи и формирования соединений сигнализации могут включать в себя все обычные средства или способы измерения и передачи, которые используются в настоящее время. Предпочтительно, технологии беспроводной передачи сигналов датчиков были бы оптимальными и выгодными.
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать форму реализаций, в которых насосы, раскрытые в данном документе для жидкостных насосных систем, могут включать в себя один насос, циркуляционный насос, группу или систему параллельно соединенных насосов или циркуляционных насосов, группу или систему последовательно соединенных насосов или циркуляционных насосов, или их комбинации.
В соответствии с некоторыми формами осуществления настоящее изобретение может включать в себя или принимать формы реализаций, в которых средства регулирования расхода в системах могут содержать клапаны с ручным или автоматическим управлением, циркуляционные насосы с ручным или автоматическим управлением или их комбинации.
Компьютерный программный продукт
Настоящее изобретение также может принимать, например, форму компьютерного программного продукта, имеющего машиночитаемый носитель со встроенным в него исполняемым компьютерным кодом для реализации способа, например, при выполнении в устройстве обработки сигналов, которое является частью такого контроллера насоса или клапана. Например, компьютерный программный продукт может принимать форму компакт-диска, гибкой дискеты, флэш-карты, карты памяти, а также других типов или видов известных теперь или разработанных в будущем запоминающих устройств, которые могут хранить такой исполняемый компьютером код на таком машиночитаемом носителе.
Алгоритмы интерполяции и приближения
В качестве примера, алгоритмы интерполяции понимаются как методы для обеспечения оценки значения в пределах (или между) двух известных значений в последовательности значений. Для сравнения алгоритмы приближения или подбора кривой понимаются как методы построения кривой или математической функции, которая имеет так называемое наилучшее соответствие для ряда точек данных, возможно, с ограничениями.
Алгоритмы интерполяции и приближения известны в данной области техники, и объем изобретения не предназначен для того, чтобы включать или ограничиваться каким-либо конкретным типом или видом, например, либо известным сейчас, либо разработанным в будущем. В качестве примера, специалист в данной области техники после прочтения настоящей заявки на патент сможет понять и оценить, как выбрать подходящий алгоритм интерполяции или приближения без чрезмерного экспериментирования для реализации настоящего изобретения.
Управляющая сигнализация
Во время работы устройство или контроллер могут использовать или дополнительно обрабатывать соответствующие давление и подачу насоса, определяемые для получения соответствующего сигнала в качестве управляющей сигнализации в случае, если это необходимо, для управления устройством, например, которое может принимать форму или включать в себя насос или один или несколько насосов в системе насосов, или систему насосов. В качестве примера управляющая сигнализация может включать в себя или принимать форму получения подходящей сигнализации для управления уставкой (Set Point, SP) одного или нескольких насосов, чтобы управлять частотой вращения одного или нескольких насосов, а также управлять клапанами или регуляторами в насосной системе и т.д. Объем изобретения не предназначен для ограничения типа или вида управления, осуществляемого в отношении насоса, или одного, или нескольких насосов в системе насосов, или системы насосов.
Другие родственные заявки
Данная заявка связана с другими патентным заявкам, которые составляют часть полного семейства технологий, разработанных одним или несколькими изобретателями в настоящем документе, и раскрытых в следующих заявках:
в заявке на патент США с порядковым номером 12/982286 (документ поверенного №911-019.001-1//F-B&G-1001), зарегистрированный 30 декабря 2010 г. под названием "Method and apparatus for pump control using varying equivalent system characteristic curve, AKA an adaptive control curve", которая опубликована как патент США №8700221 15 апреля 2014 г; и
в заявке на патент США с порядковым номером 13/717086 (документ поверенного №911-019.004-2//F-B&G-X0001), зарегистрированной 17 декабря 2012 г. под названием "Dynamic linear control methods and apparatus for variable speed pump control", которая испрашивает приоритет по предварительной заявке США №61/576737, зарегистрированный 16 декабря 2011 г., в настоящее время отмененной;
в заявке на патент США с порядковым номером 14/680667 (документ поверенного №911-019.014-2//F-B&G-X0012US01), зарегистрированной 7 апреля 2015 под названием "A Best-fit affinity sensorless conversion means for pump differential pressure and flow monitoring", которая испрашивает приоритет по предварительной заявке на патент с порядковым номером 61/976749, зарегистрированной 8 апреля 2014, в настоящее время отмененной;
в заявке на патент США с порядковым номером 14/730871 (документ поверенного №911-019.015-2//F-B&G-X0013US01), зарегистрированной 4 июня 2015 г. под названием "System and flow adaptive sensorless pumping control apparatus energy saving pumping applications", которая испрашивает приоритет по предварительной заявке на патент с порядковым номером 62/007474, зарегистрированной 4 июня 2014 г., в настоящее время отмененной; и
в заявке на патент США №14/969723 (документ поверенного №911-019.017-2//F-B&G-X0015US01), зарегистрированной 15 декабря 2015 г. под названием "Discrete valves flow rate converter", которая испрашивает приоритет по предварительной заявке на патент США №62/091965, зарегистрированной 15 декабря 2014 г.;
в заявке на патент США №15/044670, зарегистрированной 16 февраля 2016 г. (документ поверенного №911-019.019-2/F-B&G-X0016US), под названием "Detection means for sensorless pumping control applications,", которая испрашивает приоритет по предварительной заявке на патент США №62/116031, зарегистрированной 13 февраля 2015 г. под названием "No flow detection means for sensorless pumping control applications";
которые все переданы правопреемнику настоящей патентной заявки, и все они включены в настоящее описание путем ссылки на соответствующие источники в их полноте.
Данные, публикуемые производителем насосов
Специалист в данной области понимает, что производители насосов публикуют данные, касающиеся насосов, которые разработаны, изготовлены и проданы производителем. Публикуемые данные могут включать в себя различную информацию о насосе, например, в том числе, информацию о перепаде давления на насосе, подаче и соответствующих данных о мощности на максимальной частоте вращения двигателя, например, на основе испытаний насоса, выполняемых на заводе-изготовителе в ходе конструирования насоса. Такая публикуемая информация изготовителя может быть использована покупателем насоса или инженером-конструктором насоса и т.д. в отношении ввода насоса в эксплуатацию в любом конкретном применении насоса, управления насосом в любом конкретном применении насоса и т.п. Публикуемые данные насосов могут быть приведены в соответствующих технических руководствах, доступны, например, в сети Интернет, на компакт-дисках и т.д., и могут включать инструкции по установке, информацию о техническом обслуживании, диаграммы, графики, сопроводительные иллюстрации/диаграммы и т.п.
Объем изобретения
Следует понимать, что, если в настоящем документе не указано иное, любые из признаков, характеристик, вариантов или модификаций, описанных в отношении конкретной формы осуществления изобретения, также могут применяться, использоваться или включаться в любую другую форму осуществления изобретения, описанную в данном документе. Кроме того, чертежи в данном документе выполнены не в масштабе.
Хотя настоящее изобретение описано на примере центробежного насоса, подразумевается, что объем изобретения включает его использование в отношении других типов или видов насосов, известных в настоящее время или разработанных в будущем.
Хотя изобретение было описано и проиллюстрировано в отношении примеров его осуществления, в них могут быть сделаны вышеуказанные и различные другие добавления и опущения в пределах сущности и объема данного изобретения.
Контроллер насоса имеет процессор сигналов, сконфигурированный для реагирования на сигнализацию, содержащую информацию о трех соответствующих дискретных массивах относительно дискретной частоты вращения двигателя для каждой позиции системы при частоте вращения двигателя, полученной из поверхностей трехмерного дискретного распределения мощности двигателя, перепада давления на насосе и подачи насоса соответствующими численными интерполяциями; и определения соответствующей сигнализации, содержащей информацию для управления насосом или насосами в системе насосов, или системой насосов, на основе соответствующего перепада давления на насосе и подачи насоса при частоте вращения двигателя для соответствующего измеренного значения мощности, определяемых с использованием численной интерполяции трех соответствующих дискретных массивов, и принимаемой сигнализации. Процессор сигналов сконфигурирован для предоставления соответствующей сигнализации в качестве управляющей сигнализации для управления насосом или насосами в системе насосов, или системой насосов. 4 н. и 13 з.п. ф-лы, 14 ил.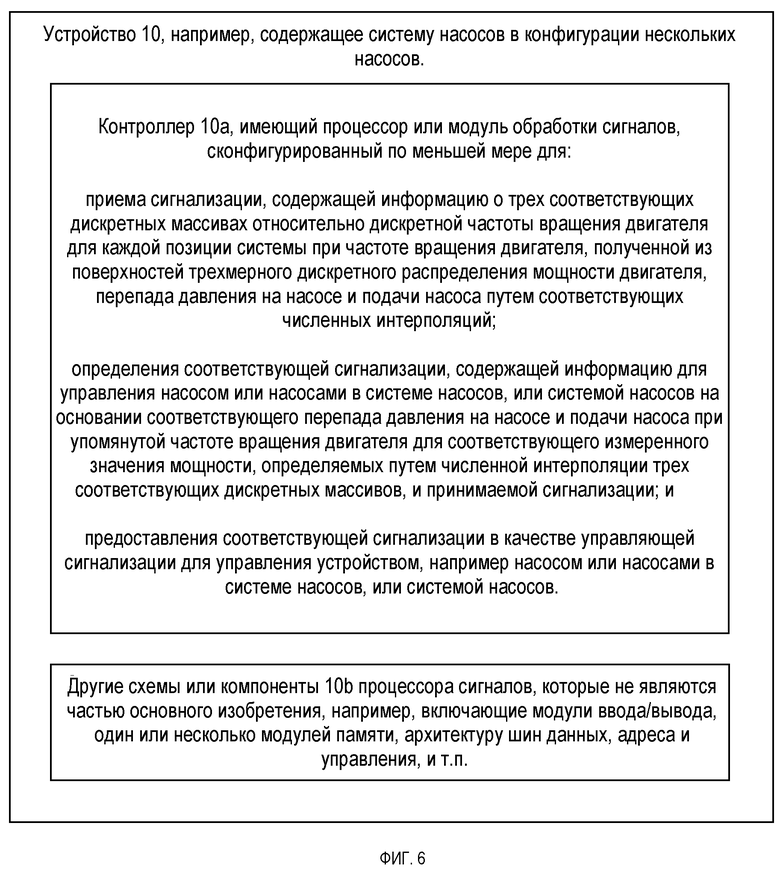
1. Насосная система, содержащая
контроллер насоса, содержащий процессор или модуль обработки сигналов, сконфигурированный для:
реагирования на принимаемую сигнализацию, содержащую информацию о трех соответствующих дискретных массивах относительно дискретной частоты вращения двигателя для каждой позиции системы при частоте вращения двигателя, полученной из трехмерных поверхностей дискретного распределения мощности двигателя, перепада давления на насосе и подачи насоса с помощью соответствующих численных интерполяций;
определения соответствующей сигнализации, содержащей информацию для управления насосом или насосами в системе насосов, или системой насосов, на основе соответствующего перепада давления на насосе и подачи насоса при упомянутой частоте вращения двигателя для соответствующего измеренного значения мощности, определяемых с использованием численной интерполяции трех соответствующих дискретных массивов, и принимаемой сигнализации, и
предоставления упомянутой соответствующей сигнализации в качестве управляющей сигнализации для управления насосом или насосами в системе насосов, или системой насосов.
2. Насосная система по п. 1, в которой процессор или модуль обработки сигналов сконфигурирован для реализации функций трехмерного дискретного распределения мощности двигателя, подачи насоса и перепада давления на насосе относительно дискретной частоты вращения двигателя для каждой позиции системы, которые включают в себя или имеют форму уравнений, как показано ниже:
где функции  являются функциями двумерного дискретного численного распределения относительно дискретной частоты вращения двигателя ni и позиции системы
являются функциями двумерного дискретного численного распределения относительно дискретной частоты вращения двигателя ni и позиции системы  , на основе массивов трехмерных дискретных данных насоса (Pij, Qij, Wij) где i=1, 2, …, N и j=1, 2, …, М, соответственно.
, на основе массивов трехмерных дискретных данных насоса (Pij, Qij, Wij) где i=1, 2, …, N и j=1, 2, …, М, соответственно.
3. Насосная система по п. 2, в которой упомянутый процессор сконфигурирован для определения дискретной мощности двигателя, подачи и перепада давления на насосе wj, qj и pj при заданной частоте вращения двигателя n путем численной интерполяции по отношению к дискретной частоте вращения двигателя ni в каждой дискретной позиции системы с j=1, 2, …, М, соответственно, в виде уравнений следующим образом:
где  - функции дискретного численного распределения относительно дискретной частоты вращения двигателя ni, основанные на массивах трехмерных дискретных данных насоса (Pij, Qij, Wij).
- функции дискретного численного распределения относительно дискретной частоты вращения двигателя ni, основанные на массивах трехмерных дискретных данных насоса (Pij, Qij, Wij).
4. Насосная система по п. 1, в которой при численной интерполяции точек трех дискретных массивов wj, qj и pj давление и подача насоса для мощности двигателя w при частоте вращения двигателя n представляются уравнениями следующим образом:
где  - функции численного распределения перепада давления на насосе, подачи насоса и коэффициента системы по отношению к соответствующей мощности двигателя
- функции численного распределения перепада давления на насосе, подачи насоса и коэффициента системы по отношению к соответствующей мощности двигателя  или w при частоте вращения двигателя n.
или w при частоте вращения двигателя n.
5. Насосная система по п. 1, которая содержит по меньшей мере одно запоминающее устройство, содержащее код компьютерной программы;
причем по меньшей мере одно запоминающее устройство и код компьютерной программы сконфигурированы так, чтобы с помощью процессора или модуля обработки сигналов заставлять устройство по меньшей мере принимать сигнализацию и определять соответствующую сигнализацию.
6. Насосная система по п. 1, содержащая насос или насосы в системе насосов.
7. Насосная система по п. 6, содержащая двигатель, сконфигурированный для приема упомянутой соответствующей сигнализации и привода насоса или насосов в системе насосов.
8. Насосная система по п. 1, в которой контроллер насоса представляет собой бессенсорный преобразователь или его часть.
9. Насосная система по п. 8, в которой бессенсорный преобразователь сконфигурирован для приема соответствующей сигнализации, содержащей информацию о числе оборотов в минуту и мощности в лошадиных силах соответствующего насоса, и предоставления сигнализации бессенсорного преобразователя, содержащей информацию о давлении и галлонах в минуту для соответствующего насоса.
10. Способ управления насосом в системе насосов, включающий:
прием в контроллере насоса, содержащем процессор или модуль обработки сигналов, сигнализации, содержащей информацию о трех соответствующих дискретных массивах относительно дискретной частоты вращения двигателя для каждой позиции системы при частоте вращения двигателя, полученной из поверхностей трехмерного дискретного распределения мощности двигателя, перепада давления на насосе и подачи насоса с помощью соответствующих численных интерполяций;
определение в процессоре или модуле обработки сигналов соответствующей сигнализации, содержащей информацию для управления насосом или насосами в системе насосов, или системой насосов, на основе соответствующего перепада давления на насосе и подачи насоса при упомянутой частоте вращения двигателя для соответствующего измеренного значения мощности, определяемых с использованием численной интерполяции трех соответствующих дискретных массивов, и принимаемой сигнализации, и
предоставление процессором или модулем обработки сигналов упомянутой соответствующей сигнализации в качестве управляющей сигнализации для управления насосом или насосами в системе насосов, или системой насосов.
11. Способ по п. 10, который включает реализацию, с помощью процессора или модуля обработки сигналов, функций трехмерного дискретного распределения мощности двигателя, подачи насоса и перепада давления на насосе относительно дискретной частоты вращения двигателя для каждой позиции системы, которые включают в себя или имеют форму следующих уравнений:
где функции являются функциями двумерного дискретного численного распределения относительно дискретной частоты вращения двигателя ni и позиции системы , на основе массивов трехмерных дискретных данных насоса (Pij, Qij, Wij), где i=1, 2, …, N и j=1, 2, …, М, соответственно.
12. Способ по п. 11, включающий определение, с помощью процессора или модуля обработки сигналов, дискретной мощности двигателя, подачи насоса и перепада давления на насосе wj, qj и pj, при заданной частоте вращения двигателя n путем численной интерполяции по отношению к дискретной частоте вращения двигателя ni в каждой дискретной позиции системы с j=1, 2, …, М, соответственно, в виде следующих уравнений:
где - функции дискретного численного распределения относительно дискретной частоты вращения двигателя ni, основанные на массивах трехмерных дискретных данных насоса (Pij, Qij, Wij).
13. Способ по п. 12, включающий представление, с помощью процессора или модуля обработки сигналов, путем численной интерполяции точек wj, qj и pj трех дискретных массивов давления и подачи насоса для мощности двигателя w при частоте вращения двигателя n уравнений следующим образом:
где - функции численного распределения перепада давления на насосе, подачи насоса и коэффициента системы по отношению к соответствующей мощности двигателя или w при частоте вращения двигателя n.
14. Способ по п. 10, включающий
конфигурирование процессора или модуля обработки сигналов по меньшей мере при помощи одного запоминающего устройства, содержащего код компьютерной программы; и
конфигурирование по меньшей мере одного запоминающего устройства и кода компьютерной программы так, чтобы с помощью процессора или модуля обработки сигналов заставлять процессор или модуль обработки сигналов по меньшей мере принимать сигнализацию и определять упомянутую соответствующую сигнализацию.
15. Насосная система, содержащая:
средства для приема в процессоре или модуле обработки сигналов сигнализации, содержащей информацию о трех соответствующих дискретных массивах относительно дискретной частоты вращения двигателя для каждой позиции системы при частоте вращения двигателя, полученной из поверхностей трехмерного дискретного распределения мощности двигателя, перепада давления на насосе и подачи насоса с помощью соответствующих численных интерполяций;
средства для определения, с помощью процессора или модуля обработки сигналов, соответствующей сигнализации, содержащей информацию для управления насосом или насосами в системе насосов, или системой насосов на основе соответствующего перепада давления на насосе и подачи насоса при частоте вращения двигателя для соответствующего измеренного значения мощности, определяемых с использованием численной интерполяции трех соответствующих дискретных массивов, и принимаемой сигнализации, и
средства для предоставления упомянутой соответствующей сигнализации в качестве управляющей сигнализации для управления насосом или насосами в системе насосов, или системой насосов.
16. Насосная система, содержащая:
насос, сконфигурированный для перекачки жидкости,
двигатель, сконфигурированный для приема управляющей сигнализации, содержащей информацию для управления насосом и привода насосов, и
контроллер насоса, содержащий процессор или модуль обработки сигналов, сконфигурированный для:
реагирования на принимаемую сигнализацию, содержащую информацию о трех соответствующих дискретных массивах относительно дискретной частоты вращения двигателя для каждой позиции системы при частоте вращения двигателя, полученной из трехмерных поверхностей дискретного распределения мощности двигателя, перепада давления на насосе и подачи насоса с помощью соответствующих численных интерполяций;
определения упомянутой управляющей сигнализации на основе соответствующего перепада давления на насосе и подачи насоса при упомянутой частоте вращения двигателя для соответствующего измеренного значения мощности, определяемых с использованием численной интерполяции трех соответствующих дискретных массивов, и принимаемой сигнализации, и
предоставления упомянутой управляющей сигнализации.
17. Насосная система по п. 16, в которой процессор или модуль обработки сигналов сконфигурирован для
реализации функций трехмерного дискретного распределения мощности двигателя, подачи насоса и перепада давления на насосе относительно дискретной частоты вращения двигателя для каждой позиции системы, которые включают в себя или имеют форму следующих уравнений:
где функции  являются функциями двумерного дискретного численного распределения относительно дискретной частоты вращения двигателя ni и позиции системы , на основе массивов трехмерных дискретных данных насоса (Pij, Qij, Wij), где i=1, 2, …, N и j=1, 2, …, М, соответственно, и
являются функциями двумерного дискретного численного распределения относительно дискретной частоты вращения двигателя ni и позиции системы , на основе массивов трехмерных дискретных данных насоса (Pij, Qij, Wij), где i=1, 2, …, N и j=1, 2, …, М, соответственно, и
определения дискретной мощности двигателя, подачи и перепада давления на насосе wj, qj и pj при заданной частоте вращения двигателя n путем численной интерполяции по отношению к дискретной частоте вращения двигателя ni в каждой дискретной позиции системы с j=1, 2, …, М, соответственно, в виде уравнений следующим образом:
где - функции дискретного численного распределения относительно дискретной частоты вращения двигателя ni, основанные на массивах трехмерных дискретных данных насоса (Pij, Qij, Wij).
| US 20140249682 A1, 04.09.2014 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАСОСОМ С ИСПОЛЬЗОВАНИЕМ ПЕРЕМЕННОЙ ХАРАКТЕРИСТИКИ ЭКВИВАЛЕНТНОЙ СИСТЕМЫ, ИЗВЕСТНОЙ КАК КРИВАЯ АДАПТИВНОГО УПРАВЛЕНИЯ | 2011 |
|
RU2546342C2 |
| Приспособление для автоматического прекращения накачивания воздуха в резервуары керосино-капильных ламп и кухонь | 1926 |
|
SU11044A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЦЕНТРОБЕЖНЫМ НАСОСОМ | 2009 |
|
RU2418990C1 |

