Область техники, к которой относится изобретение
Изобретение относится к автомобилестроению, в частности к системам помощи водителю транспортных средств (ТС), а именно, автопоездов, состоящих из автомобиля и прицепа, с функцией контроля и предотвращения дополнительного рыскания колес автопоездов.
Уровень техники
Известен способ и соответствующая система для управления транспортным средством. Способ включает прием данных, относящихся к событию проскальзывания колеса, и этап определения прогнозируемой скорости рыскания транспортного средства в зависимости от данных, относящихся к событию проскальзывания колеса. Обычно это включает в себя этап сравнения продольного проскальзывания заднего колеса с пороговым значением. Способ дополнительно включает сравнение прогнозируемой скорости рыскания транспортного средства с целевой скоростью рыскания и управление тормозным моментом, прикладываемым тормозным механизмом по меньшей мере к одному колесу транспортного средства, в зависимости от прогнозируемой скорости рыскания транспортного средства. Изобретение направлено на устранение таких непредвиденных ситуаций, как недостаточная поворачиваемость, превышение скорости или занос из-за неисправности двигательной установки, и может способствовать контролю устойчивости в течение короткого промежутка времени (см. патент Великобритании GB 2545463 А, заявитель JAGUAR LAND ROVER LTD, опубл. 21.06.2017).
Основными недостатками известной системы являются наличие в ней обязательной сложной системы определения и выработки управляющих воздействий, а также невозможность ее применения на автопоездах, состоящих из автомобиля и прицепа (прицепов) из-за отсутствия контроля и предотвращения опасных состояний - дополнительного рыскания колес у прицепа.
Известна система контроля и предотвращения дополнительного рыскания колес автомобиля, содержащая датчики частот вращения колес автомобиля, электрически связанные с устройством обработки информации линиями связи сопряжения, микропроцессорное устройство обработки информации, включающее блок настроечных параметров оценки физических параметров датчиков вращения колес автомобиля, блок анализа, блок сравнения с критическими значениями физических параметров датчиков вращения колес автомобиля, блок формирования сигналов, характеризующих состояние и характер движения автомобиля, блок формирования управляющих воздействий на органы управления автомобилем, (см. патент США US 5275474 А, заявитель GENERAL MOTORS CORPORATION, опубл. 04.01.1994).
Известное устройство, направлено на предотвращение дополнительного рыскания колес автомобиля, в котором регулятор проскальзывания колес управляет крутящим моментом, передаваемым на левое и правое колеса ведущей оси, таким образом, чтобы обеспечить баланс между продольными силами, ускоряющими (в системе контроля тяги) или замедляющими (в антиблокировочной тормозной системе) транспортное средство, и скоростью рыскания транспортного средства во время движения с учетом распределенного коэффициента сцепления колес с поверхностью. Состояние рыскания транспортного средства определяется, когда заданная функция разности скоростей левого и правого колес превышает пороговое значение при низких скоростях транспортного средства и когда заданная функция разности проскальзываний левого и правого колес превышает пороговое значение при высоких скоростях транспортного средства. Основными недостатками известной системы и устройства, направленного на предотвращение дополнительного рыскания, являются сложное поэтапное сравнение контролируемых по дополнительному рысканию колес и других параметров движения автомобиля, а также невозможность ее применения на автопоездах, состоящих из автомобиля и прицепа (прицепов) из-за отсутствия контроля и предотвращения опасных состояний -дополнительного рыскания колес у прицепа.
Известна система контроля и предотвращения дополнительного рыскания колес автомобиля, содержащая датчики частот вращения колес автомобиля, электрически связанные с устройством обработки информации линиями связи сопряжения, микропроцессорное устройство обработки информации, включающее блок настроечных параметров оценки физических параметров датчиков вращения колес автомобиля, блок анализа, блок сравнения с критическими значениями физических параметров датчиков вращения колес автомобиля, блок формирования сигналов, характеризующих состояние и характер движения автомобиля, блок формирования управляющих воздействий на органы управления автомобилем (см. патент США US 5704695 А, заявитель TOYOTA MOTOR СО LTD (TOYOTA JIDOSHA KABUSHIKI KAISHA), опубл. 06.01.1998).
Известное устройство и система управления подавлением заноса транспортного средства, имеющее механизм для оценки склонности кузова транспортного средства к заносу, необходимое для получения величины заноса, которая обычно увеличивается вместе с увеличением вероятности заноса; тормозной механизм для выборочного приложения переменного тормозного усилия к каждому колесу; и механизм управления тормозным механизмом в соответствии с величиной заноса, чтобы по-разному прикладывать тормозное усилие к задним левым и задним правым колесам с заданным значением для предотвращения заноса кузова транспортного средства, причем целевое значение, как правило, пропорционально величине заноса и делится между задним левым и задним правым колесами в соответствии с коэффициентом распределения, при этом механизм управления постепенно уменьшает долю коэффициента распределения для одного из задних левых и задних правых колес, обрабатывающих внутреннюю часть поворота, по сравнению с долей коэффициента распределения для другого из задних левых и задних правых колес, обрабатывающих внешнюю часть поворота, поскольку контроль смещения приближается к концу. Основными недостатками известной системы являются сложная взаимно дублированная система управления автомобилем во время дополнительного рыскания и невозможность ее применения на автопоездах, состоящих из автомобиля и прицепа (прицепов), из-за отсутствия контроля и предотвращения опасных состояний -дополнительного рыскания колес у прицепа.
Известна система контроля и предотвращения дополнительного рыскания колес автомобиля, содержащая датчики частот вращения колес автомобиля, электрически связанные с устройством обработки информации линиями связи сопряжения, микропроцессорное устройство обработки информации, включающее блок настроечных параметров оценки физических параметров датчиков вращения колес автомобиля, блок анализа, блок сравнения с критическими значениями физических параметров датчиков вращения колес автомобиля, блок формирования сигналов, характеризующих состояние и характер движения автомобиля, блок формирования управляющих воздействий на органы управления автомобилем (см. патент США US 6112147 А заявитель GENERAL MOTORS CORPORATION, опубл. 29.08.2000).
Известное устройство, которым осуществляется улучшенный контроль скорости рыскания недорогого транспортного средства, который компенсирует угол наклона дороги с использованием легкодоступной информации, такой как угол поворота рулевого колеса, скорость транспортного средства и обороты неуправляемых колес транспортного средства. Управление системой основано на признании того факта, что в линейных условиях эксплуатации на наклонной поверхности разница между желаемой скоростью рыскания и фактической или расчетной скоростью рыскания приводит к смещению скорости рыскания, которое компенсирует угол крена, а произведение скорости рыскания и скорости транспортного средства по существу соответствует боковому ускорению. Смещение скорости рыскания используется для компенсации управления рысканием, когда угол поворота рулевого колеса, произведение скорости рыскания на скорость транспортного средства и погрешность скорости рыскания указывают на движение по дороге с уклоном. Компенсация отключается, если угол поворота рулевого колеса, скорость рыскания - произведение скорости транспортного средства и погрешности скорости рыскания не указывают на работу на дороге с уклоном, Кроме этого, в состав системы входят датчики, необходимые для измерений угловой скорости вращения по отдельности каждого колеса и центра масс автомобиля, измерений угла поворота рулевого колеса и акселерометры продольного и поперечного ускорений, а также устройства антиблокировочной системы с прерывистым режимом раздельного торможения колес правого и левого бортов.
К недостаткам данной системы относятся высокая стоимость конструкции измерительной и исполнительной частей системы, а также невозможность ее применения на автопоездах, состоящих из автомобиля и прицепа (прицепов) из-за отсутствия контроля и предотвращения опасных состояний - дополнительного рыскания колес у прицепа.
Наиболее близким по технической сущности является система определения угловой скорости дополнительного рыскания колес по патенту РФ №RTJ 2700209 (Система контроля и предотвращения дрифта колес автомобиля / Бузников С.Е., Елкин Д. С, Шабанов Н. С, Струков В. О., Сайкин А. М. // Роспатент, 2019).
Известная из данного патента система контроля и предотвращения дополнительного рыскания колес автомобиля содержит
датчики частот вращения колес автомобиля, электрически связанные с микроконтроллерным устройством обработки информации посредством линий связи с устройством сопряжения,
микроконтроллерное устройство обработки информации, включающее блок настроечных параметров оценки физических параметров датчиков вращения колес автомобиля,
блок анализа параметров датчиков частот вращения колес автомобиля,
блок сравнения с критическими значениями физических параметров датчиков частот вращения колес автомобиля,
блок формирования сигналов, характеризующих состояние и характер движения автомобиля,
блок формирования сигналов для передачи управляющих воздействий на органы управления автомобилем: на рулевое колесо, тормоза, акселератор,
при этом
микроконтроллерное устройство выполнено с возможностью обработки информации с исполнением в соответствии с заложенными в нем программами согласно исполнению функций блока анализа физических параметров датчиков вращения колес автомобиля, блока сравнения с критическими значениями физических параметров датчиков частот вращения колес автомобиля, блока формирования сигналов, характеризующих состояние и характер движения автомобиля, блока формирования сигналов для передачи управляющих воздействий на органы управления автомобилем,
блок настроечных параметров выполнен с возможностью оценки физических параметров датчиков частот вращения колес автомобиля и выявления неисправных датчиков, показания которых будут исключены из дальнейшего анализа,
причем подсистема контроля и предотвращения дополнительного рыскания колес автомобиля снабжена устройством ввода, корректировки и отображения информации в блок настроечных параметров,
которое дополнительно снабжено блоком оперативного ввода настроечной информации об опасных состояниях окружающей среды и блоком индикации опасных состояний, выполненными с возможностью определения опасных состояний, по меньшей мере, от одного датчика по сигналу частоты вращения колес по каждому борту,
а также подсистема контроля и предотвращения дополнительного рыскания колес автомобиля дополнительно снабжена блоком выбора режима передачи информации об опасных состояниях автомобиля.
Данная система позволяет предотвратить дополнительное рыскание автомобиля путем определения угловой скорости дополнительного рыскания колес автомобиля и управления тормозами автомобиля за счет выполнения косвенных измерений, прогнозирования и предотвращения дополнительного рыскания колес автомобиля, обеспечивая тем самым достижение стабилизации угловой скорости дополнительного рыскания его колес на нулевом уровне.
Но недостатками и данной системы являются недостаточно широкий вектор измеряемых координат состояния автомобиля, и в частности, угловой скорости дополнительного рыскания колес, и, самое главное, отсутствие решения задачи стабилизации угловой скорости дополнительного рыскания колес прицепа в составе автопоезда и по этой причине - отсутствие предотвращения опасных состояний не только прицепа, но и автопоезда в целом, в том числе - отсутствие решения задачи исключения опасных режимов автопоезда и его составных частей, обусловленных дополнительным рысканием.
Раскрытие сущности изобретения
Техническая задача, на решение которой направлено предлагаемое изобретение, состоит в предотвращении опасных состояний автомобиля и прицепа в составе автопоезда путем выполнения косвенных измерений, прогнозирования и предотвращения дополнительного рыскания колес как автомобиля и прицепа, входящих состав автопоезда, так и автопоезда в целом.
Поставленная техническая задача решается тем, что согласно предложенному изобретению
система контроля и предотвращения дополнительного рыскания колес автопоезда, в составе автомобиля и, по меньшей мере, одного прицепа, в которой подсистема контроля и предотвращения дополнительного рыскания колес автомобиля содержит
датчики 1, 2, 3, 4 частот вращения колес автомобиля, электрически связанные с микроконтроллерным устройством 5 автомобиля обработки информации линиями связи посредством устройства 6 сопряжения,
микроконтроллерное устройство 5 обработки информации, которое включает:
блок 7 настроечных параметров выполнен с возможностью оценки физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля и выявления неисправных датчиков, а также - с возможностью исключения из дальнейшего анализа их показаний;
блок 8 анализа параметров датчиков 1, 2, 3, 4 частот вращения колес автомобиля;
блок 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4 частот вращения колес автомобиля;
блок 10 формирования сигналов, характеризующих состояние и характер движения автомобиля;
блок 11 формирования сигналов для передачи управляющих воздействий на органы 12 управления автомобилем, то есть на рулевой механизм 13, тормоза 14, акселератор 15, при этом
микроконтроллерное устройство 5 выполнено с возможностью обработки информации и исполнения, в соответствии с заложенными в нем программами, функций блока 8 анализа физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес автомобиля, блока 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блока 11 формирования сигналов для передачи управляющих воздействий на органы 12 управления автомобилем, соответственно на рулевой механизм 13, тормоза 14 и акселератор 15,
блок 7 настроечных параметров выполнен с возможностью оценки физических параметров датчиков 1,2, 3, 4 частот вращения колес автомобиля и выявления неисправных датчиков, а также - с возможностью исключения из дальнейшего анализа их показаний,
причем подсистема контроля и предотвращения дополнительного рыскания колес автомобиля снабжена устройством 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров,
которое снабжено блоком 17 оперативного ввода настроечной информации об опасных состояниях окружающей среды и блоком 18 индикации опасных состояний, выполненными с возможностью определения опасных состояний, по меньшей мере, от одного датчика по сигналу частоты вращения колес по каждому борту,
а также подсистема контроля и предотвращения дополнительного рыскания колес автомобиля снабжена блоком 19 выбора режима передачи информации об опасных состояниях автомобиля,
отличающаяся тем, что
система контроля и предотвращения дополнительного рыскания автопоезда дополнительно снабжена подсистемой контроля и предотвращения дополнительного рыскания колес прицепа и подсистемой контроля и предотвращения дополнительного рыскания колес автопоезда в целом, при этом система контроля и предотвращения дополнительного рыскания колес автопоезда в целом в составе автомобиля и прицепа, дополнительно снабжена подсистемой контроля и предотвращения дополнительного рыскания колес прицепа с микроконтроллерным устройством 24 обработки информации прицепа, которое посредством линий связи и устройства 25 сопряжения электрически соединено с импульсными датчиками 20, 21, 22, 23 частот вращения колес прицепа и включает:
блок 26 настроечных параметров оценки физических параметров датчиков 20, 21, 22, 23 частот вращения колес прицепа;
блок 27 анализа параметров датчиков 20, 21, 22, 23 частот вращения колес прицепа;
блок 28 сравнения с критическими значениями физических параметров датчиков 20, 21, 22, 23 частот вращения колес прицепа;
блок 29 формирования сигналов, характеризующих состояние и характер движения прицепа;
блок 30 формирования сигналов для передачи управляющих воздействий на органы 38 управления прицепом, то есть на устройство 39 управления поворотом колес прицепа, тормоза 40 прицепа, акселератор 15 автомобиля,
а также микроконтроллерное устройство 24 обработки информации прицепа выполнено с возможностью обработки информации и выработки управляющих сигналов в соответствии с заложенными в нем программами анализа и управления и с возможностью исполнения функций соответственно блока 27 анализа физических параметров датчиков 20, 21, 22, 23 вращения колес прицепа, блока 28 сравнения с критическими значениями физических параметров датчиков 20, 21, 22 и 23 частот вращения колес прицепа, блока 29 формирования сигналов, характеризующих состояние и характер движения прицепа, блока 30 формирования сигналов с возможностью формирования и передачи управляющих воздействий подсистемы прицепа системы контроля и предотвращения дополнительного рыскания колес автопоезда в составе автомобиля и прицепа,
блок 26 настроечных параметров прицепа выполнен с возможностью оценки физических параметров датчиков 20, 21, 22, 23 вращения колес прицепа, с возможностью выявления среди них неисправных датчиков с возможностью исключения их показаний из дальнейшего анализа,
причем подсистема контроля и предотвращения дополнительного рыскания колес прицепа дополнительно снабжена устройством 31 ввода, корректировки и отображения информации в блок 26 настроечных параметров,
которое дополнительно снабжено блоком 32 оперативного ввода настроечной информации об опасных состояниях окружающей среды и блоком 33 индикации опасных состояний, выполненными с возможностью определения опасных состояний, по меньшей мере, по сигналу от одного действующего датчика частоты вращения колес по каждому борту,
а также система контроля и предотвращения дополнительного рыскания колес автопоезда в целом дополнительно снабжена блоком 34 выбора режима передачи информации об опасных состояниях прицепа,
причем система контроля и предотвращения дополнительного рыскания колес автопоезда в целом, состоящего из автомобиля и прицепа, дополнительно содержит подсистему контроля и предотвращения дополнительного рыскания колес автопоезда, которая снабжена блоком 35 анализа опасных состояний автомобиля и/или прицепа автопоезда, выполненным с возможностью выбора оптимального варианта и определения последовательности устранения опасных ситуаций автопоезда, а также - блоком 36, выполненным с возможностью вывода водителю на устройство 37 графических данных о состоянии автопоезда и передачи управляющих сигналов соответственно на органы 12 управления автомобилем, такие как рулевой механизм 13, тормоза 14 и акселератор 15, и/или на органы 38 управления прицепом, такие как устройство 39 управления поворотом колес прицепа, тормоза 40 прицепа и акселератор 15 автомобиля (см. Фигуру).
Технический результат достигается за счет создания системы контроля и предотвращения дополнительного рыскания колес как автомобиля, так и прицепа, входящих в состав автопоезда, в которой ее блоки связаны определенным образом.
Краткое описание чертежей
На чертеже (см. фигуру 1) показана блок-схема системы контроля и предотвращения дополнительного рыскания колес автопоезда.
Осуществление изобретения
Система контроля и предотвращения дополнительного рыскания колес автопоезда содержит:
1. Датчик 1 частоты вращения левого переднего колеса автомобиля.
2. Датчик 2 частоты вращения правого переднего колеса автомобиля.
3. Датчик 3 частоты вращения левого заднего колеса автомобиля.
4. Датчик 4 частоты вращения правого заднего колеса автомобиля.
5. Микроконтроллерное устройство 5 подсистемы автомобиля, предназначенное для обработки информации подсистемы контроля и предотвращения дополнительного рыскания колес автомобиля.
6. Устройство 6 сопряжения подсистемы контроля и предотвращения дополнительного рыскания колес автомобиля.
7. Блок 7 настроечных параметров оценки физических параметров датчиков 1, 2, 3 и 4 частот вращения колес автомобиля.
8. Блок 8 анализа параметров датчиков 1, 2, 3, 4 частот вращения колес автомобиля.
9. Блок 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4 частот вращения колес автомобиля.
10. Блок 10 формирования сигналов, характеризующих состояние и характер движения автомобиля.
11. Блок 11 формирования сигналов для передачи управляющих воздействий и команд подсистемы автомобиля в систему контроля и предотвращения дополнительного рыскания колес автопоезда.
12. Органы 12 управления автомобилем.
13. Рулевой механизм 13 автомобиля.
14. Тормоза 14 автомобиля.
15. Акселератор 15 автомобиля.
16. Устройство 16 ввода, корректировки и отображения информации в блок 7.
17. Блок 17 оперативного ввода настроечной информации об опасных состояниях окружающей среды.
18. Блок 18 индикации опасных состояний, выполненный с возможностью определения опасных состояний.
19. Блок 19 выбора режима и передачи информации об опасных состояниях автомобиля.
20. Датчик 20 частоты вращения левого переднего колеса прицепа.
21. Датчик 21 частоты вращения правого переднего колеса прицепа.
22. Датчик 22 частоты вращения левого заднего колеса прицепа.
23. Датчик 23 частоты вращения правого заднего колеса прицепа.
24. Микроконтроллерное устройство 24 обработки информации подсистемы прицепа контроля и предотвращения дополнительного рыскания прицепа.
25. Устройство 25 сопряжения подсистемы прицепа контроля и предотвращения дополнительного рыскания колес прицепа.
26. Блок 26 настроечных параметров оценки физических параметров датчиков 20, 21, 22 и 23 частот вращения колес прицепа.
27. Блок 27 анализа параметров датчиков 1, 2, 3, 4 частот вращения колес прицепа.
28. Блок 28 сравнения с критическими значениями физических параметров датчиков 20, 21, 22, 23 частот вращения колес прицепа.
29. Блок 29 формирования сигналов, характеризующих состояние и характер движения прицепа.
30. Блок 30 формирования сигналов для передачи управляющих воздействий и команд подсистемы прицепа в систему контроля и предотвращения дополнительного рыскания колес автопоезда в составе автомобиля и прицепа.
31. Устройство 31 ввода, корректировки и отображения информации в блок 26 настроечных параметров.
32. Блок 32 оперативного ввода настроечной информации об опасных состояниях окружающей среды.
33. Блок 33 индикации опасных состояний, выполненными с возможностью определения опасных состояний.
34. Блок 34 выбора режима и передачи информации об опасных состояниях прицепа.
35. Блок 35 системы контроля и предотвращения дополнительного рыскания колес автопоезда для анализа опасных состояний автомобиля, прицепа и автопоезда в целом и выбора оптимального варианта и определения последовательности устранения опасных ситуаций автопоезда.
36. Блок 36 вывода графических данных водителю и/или оператору автопоезда и сигналов на органы управления автомобилем и прицепом.
37. Устройство 37 графической информации.
38. Органы 38 управления прицепом.
39. Устройство 39 управления поворотом колес прицепа.
40. Тормоза 40 прицепа.
Система контроля и предотвращения дополнительного рыскания колес автопоезда в составе автомобиля и, по меньшей мере, одного прицепа в которой подсистема контроля и предотвращения дополнительного рыскания колес автомобиля содержит;
преимущественно импульсные датчики 1, 2, 3, 4 частот вращения колес автомобиля, электрически связанные с микроконтроллерным устройством 5 обработки информации автомобиля линиями связи посредством устройства 6 сопряжения,
микроконтроллерное устройство 5 обработки информации, которое включает:
блок 7 настроечных параметров, который выполнен с возможностью оценки физических параметров датчиков 1, 2, 3, 4 частот вращения колес автомобиля и выявления неисправных датчиков, а также - с возможностью исключения из дальнейшего анализа их показаний;
блок 8 анализа параметров датчиков 1, 2, 3, 4 частот вращения колес автомобиля;
блок 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4 частот вращения колес автомобиля;
блок 10 формирования сигналов, характеризующих состояние и характер движения автомобиля;
блок 11 формирования сигналов для передачи управляющих воздействий на органы 12 управления автомобилем, то есть на рулевой механизм 13, тормоза 14, акселератор 15 автомобиля, при этом
микроконтроллерное устройство 5 автомобиля выполнено с возможностью обработки информации и исполнения, в соответствии с заложенными в нем программами, функций блока 8 анализа физических параметров датчиков 1,2, 3, 4 вращения колес автомобиля, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес автомобиля, блока 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блока 11 формирования сигналов для возможности передачи управляющих воздействий на органы 12 управления автомобилем, соответственно на рулевой механизм 13, тормоза 14 и акселератор 15 автомобиля,
блок 7 настроечных параметров выполнен с возможностью оценки физических параметров датчиков 1,2, 3, 4 частот вращения колес автомобиля и выявления неисправных датчиков, а также - с возможностью исключения из дальнейшего анализа их показаний,
причем подсистема контроля и предотвращения дополнительного рыскания колес автомобиля снабжена устройством 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров, которое снабжено блоком 17 оперативного ввода настроечной информации об опасных состояниях окружающей среды и блоком 18 индикации опасных состояний, выполненными с возможностью определения опасных состояний, по меньшей мере, по сигналу от одного датчика частоты вращения колес по каждому борту,
а также подсистема контроля и предотвращения дополнительного рыскания колес автомобиля дополнительно снабжена блоком 19 выбора режима передачи информации об опасных состояниях автомобиля,
и, кроме этого,
система контроля и предотвращения дополнительного рыскания автопоезда дополнительно снабжена подсистемой контроля и предотвращения дополнительного рыскания колес прицепа и подсистемой контроля и предотвращения дополнительного рыскания колес автопоезда в целом, при этом подсистема контроля и предотвращения дополнительного рыскания колес автопоезда в составе автомобиля и прицепа, дополнительно снабжена подсистемой контроля и предотвращения дополнительного рыскания колес прицепа, с микроконтроллерным устройством 24 обработки информации прицепа, которое посредством линий связи и устройства 25 сопряжения электрически соединено с импульсными датчиками 20, 21, 22, 23 частот вращения колес прицепа и включает:
блок 26 настроечных параметров оценки физических параметров датчиков 20, 21, 22, 23 частот вращения колес прицепа;
блок 27 анализа параметров датчиков 20, 21, 22, 23 частот вращения колес прицепа;
блок 28 сравнения с критическими значениями физических параметров датчиков 20, 21, 22, 23 частот вращения колес прицепа;
блок 29 формирования сигналов, характеризующих состояние и характер движения прицепа;
блок 30 формирования сигналов для передачи управляющих воздействий на органы 38 управления прицепом, то есть на устройство 39 управления поворотом колес прицепа, тормоза 40 прицепа, акселератор 15 автомобиля,
а также микроконтроллерное устройство 24 обработки информации прицепа выполнено с возможностью обработки информации и выработки управляющих сигналов в соответствии с заложенными в нем программами анализа и управления и с возможностью исполнения функций соответственно блока 27 анализа физических параметров датчиков 20, 21, 22, 23 вращения колес прицепа, блока 28 сравнения с критическими значениями физических параметров датчиков 20, 21, 22 и 23 частот вращения колес прицепа, блока 29 формирования сигналов, характеризующих состояние и характер движения прицепа, блока 30 формирования сигналов с возможностью формирования и передачи управляющих воздействий подсистемы прицепа системы контроля и предотвращения дополнительного рыскания колес автопоезда в составе автомобиля и прицепа,
блок 26 настроечных параметров прицепа выполнен с возможностью оценки физических параметров датчиков 20, 21, 22, 23 вращения колес прицепа с возможностью выявления среди них неисправных датчиков и с возможностью исключения их показаний из дальнейшего анализа,
причем подсистема контроля и предотвращения дополнительного рыскания колес прицепа дополнительно снабжена устройством 31 ввода, корректировки и отображения информации в блок 26 настроечных параметров,
которое дополнительно снабжено блоком 32 оперативного ввода настроечной информации об опасных состояниях окружающей среды и блоком 33 индикации опасных состояний, выполненными с возможностью определения опасных состояний, по меньшей мере, по сигналу от одного действующего датчика частоты вращения колес по каждому борту,
а также подсистема контроля и предотвращения дополнительного рыскания колес автопоезда в целом дополнительно снабжена блоком 34 выбора режима передачи информации об опасных состояниях прицепа,
причем подсистема контроля и предотвращения дополнительного рыскания колес автопоезда в целом, состоящего из автомобиля и прицепа
дополнительно содержит подсистему контроля и предотвращения дополнительного рыскания колес автопоезда, которая снабжена блоком 35 анализа опасных состояний автомобиля и/или прицепа автопоезда, выполненным с возможностью определения оптимального варианта и выбора последовательности устранения опасных ситуаций автопоезда, а также - блоком 36, выполненным с возможностью вывода водителю и/или оператору на устройство 37 графической информации соответственно на органы 12 управления автомобилем, такие как рулевой механизм 13, тормоза 14 и акселератор 15, и/или на органы 38 управления прицепом, такие как устройство 39 управления поворотом колес прицепа, тормоза 40 прицепа и акселератор 15 автомобиля, соответственно на органы 12 управления автомобилем, такие как рулевой механизм 13, тормоза 14 и акселератор 15, и/или на органы 38 управления прицепом, такие как устройство 39 управления поворотом колес прицепа, тормоза 40 прицепа и акселератор 15 автомобиля.
Устройство графической информации водителя, служит для информирования водителя о приближении или наступлении опасных состояний и необходимых мерах для исключения предпосылок к аварийным ситуациям, но оно не является предметом данного предложения, так как выполнено из широко известных элементов, соединенных между собой по известным правилам с помощью известных средств.
Предложенная система работает следующим образом.
При движении автопоезда в подсистеме контроля и предотвращения дополнительного рыскания колес автомобиля датчики 1, 2, 3, 4 вырабатывают сигналы о частоте вращения колес автомобиля, а так как они электрически связаны с микроконтроллерным устройством 5, то эти сигналы посредством линий связи с устройством 6 сопряжения постоянно поступают в микроконтроллерное устройство 5 обработки информации, которое включает программный блок 7 настроечных параметров оценки физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, которое сравнивает их значения с рабочим диапазоном сигналов датчиков и выявляет датчики, у которых возникли неисправности в виде пропадания сигнала на ограниченном временном интервале. При этом автоматически показания такого датчика исключаются из дальнейшего анализа (см. Фигуру).
Далее в микроконтроллерном устройстве 5 обработки информации программный блок 8 анализа параметров датчиков 1, 2, 3, 4 по установленной на нем программе сравнивает сигналы от датчиков 1, 2, 3, 4 частот вращения колес автомобиля между собой и получает данные, характеризующие состояние и характер движения автомобиля. Так, например, если датчики 1,3 левого борта имеют пропорционально большие частоты вращения, чем частоты датчиков 2, 4 правого борта, то устанавливается, что автомобиль поворачивает направо. Такое состояние определяется углом поворота управляемых колес, зависящему от угла поворота рулевого колеса рулевого механизма 13. Например, если датчики 1, 3 левого борта имеют не пропорциональное изменение частот вращения, то устанавливается, что колеса передней и/или задней оси попадают в дополнительное рыскание (занос задних колес и/или снос передних колес автомобиля), при котором соответствующие колеса начинают двигаться так, что вместо трения качения с минимальным уводом шин в пределах упругих деформаций эластичного материала колеса начинают двигаться под действием трения скольжения.
На основании полученных сигналов микроконтроллерное устройство 5 обработки информации системы по разработанным авторами программам, реализующим соответствующие алгоритмы зависимостей между параметрами частот вращения колес, на основании их математической обработки и на основании настроечных параметров формирует оценки физических параметров, характеризующие состояние автомобиля, в том числе оценки скорости центра масс, угла поворота управляемых колес, скоростей продольных скольжений колес, максимальных значений коэффициентов трения скольжения колес, а также граничных скоростей сноса передних и заноса задних колес, граничных значений углов поворота управляемых колес, соответствующих сносу передних и заносу задних колес и оценки угловой скорости дополнительного рыскания колес автомобиля. Очевидно, что указанные настроечные и расчетные параметры могут оперативно меняться в процессе движения автомобиля и их конкретные значения не могут быть предметом подробного анализа и разъяснения во всех возможных аспектах движения автомобиля на маршруте и по этой причине подробно не рассматриваются в данном предложении.
По результатам расчетов выявленный сигнал опасного состояния автомобиля поступает в программный блок 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4 частот вращения колес автомобиля, где происходит сравнение с критическими значениями физических параметров датчиков 1, 2, 3, 4, устанавливается вид дополнительного рыскания, соответствующий сносу передних 1, 2 и/или заносу задних 3, 4 колес, и по оценке угловой скорости дополнительного рыскания колес автомобиля устанавливается степень опасности этого явления у автомобиля.
После определения степени опасности этого явления у автомобиля программный блок 10 формирования сигналов, характеризующих состояние и характер движения автомобиля и программный блок 11 формируют сигналы для передачи управляющих воздействий и команд подсистемы автомобиля в подсистему контроля и предотвращения дополнительного рыскания колес автомобиля для последующего воздействия на органы 12 управления движением автомобиля и на устройство вывода графической информации для водителя 37.
Параллельно и одновременно с работой подсистемы контроля и предотвращения дополнительного рыскания колес автомобиля во время движения автопоезда в подсистеме контроля и предотвращения дополнительного рыскания колес прицепа датчики 20, 21, 22 и 23 вырабатывают сигналы о частоте вращения колес прицепа, которые (по аналогии подсистемы контроля и предотвращения дополнительного рыскания колес автомобиля) посредством линий связи с устройством 25 сопряжения постоянно поступают в микроконтроллерное устройство 24 обработки информации, которое включает программный блок 26 настроечных параметров оценки физических параметров датчиков 20, 21, 22, 23 частот вращения колес прицепа, которое сравнивает их значения с рабочим диапазоном сигналов датчиков и выявляет датчики, у которых возникли неисправности в виде пропадания сигнала на ограниченном временном интервале. При этом автоматически показания такого датчика исключаются из дальнейшего анализа.
Далее в микроконтроллерном устройстве 24 обработки информации программный блок 27 анализа параметров датчиков 20, 21, 22, 23 по установленной на нем программе сравнивает сигналы от датчиков 20, 21, 22, 23 частот вращения колес прицепа между собой и получает данные, характеризующие состояние и характер движения прицепа. Так же как и в подсистеме контроля и предотвращения дополнительного рыскания колес автомобиля, то и в подсистеме прицепа, если датчики 20, 22 левого борта прицепа имеют пропорционально большие частоты вращения, чем частоты датчиков 21, 23 правого борта, то устанавливается, что прицеп поворачивает направо. Такое состояние определяется углом поворота управляемых колес прицепа при наличии механизма их поворота, соответствующего углу поворота поворачиваемой штанги колес прицепа. Например, если датчики 1, 3 левого борта прицепа имеют не пропорциональное изменение частот вращения, то устанавливается, что колеса передней и/или задней оси попадают в дополнительное рыскание (занос задних колес и/или снос передних колес прицепа).
На основании полученных сигналов микроконтроллерное устройство 24 обработки информации системы по разработанным авторами программам и под их математическим обеспечением, реализующим соответствующие алгоритмы зависимостей между параметрами частот вращения колес транспортного средства, на основании их математической обработки и на основании настроечных параметров формирует оценки физических параметров, характеризующие состояние прицепа, в том числе оценки скорости центра масс, угла поворота управляемых колес, скоростей продольных скольжений колес, максимальных значений коэффициентов трения скольжения колес, а также граничных скоростей сноса передних и заноса задних колес, граничных значений углов поворота управляемых колес, соответствующих сносу передних и заносу задних колес и оценки угловой скорости дополнительного рыскания колес прицепа. По аналогии с подсистемой автомобиля указанные настроечные и расчетные параметры могут оперативно меняться в процессе движения прицепа и их конкретные значения также не являются предметом подробного анализа и разъяснения во всех возможных аспектах движения прицепа на маршруте движения автопоезда и по этой причине также дополнительно не рассматриваются в данном предложении.
По результатам расчетов выявленный сигнал опасного состояния прицепа поступает в программный блок 28 сравнения с критическими значениями физических параметров датчиков 20, 21, 22, 23 частот вращения колес прицепа, в котором происходит сравнение с критическими значениями физических параметров датчиков 20, 21, 22, 23, устанавливается вид дополнительного рыскания, соответствующий сносу передних 20, 21 и/или заносу задних 22, 23 колес, и по оценке угловой скорости дополнительного рыскания колес прицепа устанавливается степень опасности этого явления у прицепа.
После определения степени опасности у прицепа программный блок 29 формирования сигналов, характеризующих состояние и характер движения прицепа и программный блок 30 формируют сигналы для передачи управляющих воздействий и команд подсистемы прицепа в систему контроля и предотвращения дополнительного рыскания колес автопоезда для возможности последующего воздействия на органы 38 управления движением прицепа (Устройство 39 управления поворотом колес прицепа, тормоза 40 прицепа, акселератор 15 автомобиля) и на устройство вывода графической информации водителю 37.
Далее сигналы из блока 19 выбора режима и передачи информации об опасных состояниях автомобиля и из блока 34 выбора режима и передачи информации об опасных состояниях прицепа поступают в блок 35, в котором производится анализ опасных состояний как автомобиля, так и прицепа автопоезда и по максимальному значению степени опасности состояния автомобиля или прицепа (или при их равенстве) блок 35 фиксирует факт опасного состояния у одного из них (или вместе у них) и выбирает оптимальный вариант устранения причины возникновения опасного состояния автопоезда и определяет последовательность его устранения.
Дополнительные отличия конструктивных особенностей предложенной системы и их работы в сравнении с известными конструкциями заключаются в следующем.
Если в подсистемах автомобиля и прицепа блоки 8 и 27 анализа, 9 и 28 сравнения, 10 и 29 формирования сигналов, 11 и 30 формирования сигналов для управляющих воздействий выполнены на базе микроконтроллерных устройств 5 и 24 соответственно в виде программных блоков, работающих с возможностью программного исполнения функций блока 8 и 27 анализа физических параметров датчиков 1, 2, 3, 4, а также датчиков 20, 21, 22, 23 вращения колес автомобиля и прицепа, блоков 9 и 28 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4 частот вращения колес автомобиля и прицепа, блоков 10 и 30 формирования сигналов, характеризующих состояние и характер движения автомобиля и прицепа, блоков 11 и 30 формирования сигналов для управляющих воздействий на органы 12 и 31 управления автомобилем и прицепом соответственно,
то такое выполнение позволяет значительно ускорить процессы анализа физических параметров датчиков 1, 2, 3, 4 и 20, 21, 22, 23 вращения соответственно колес автомобиля и прицепа, сравнения с их критическими значениями физических параметров, правильно оценить опасность ситуации и оперативно сформировать с помощью блоков 35 и 36 последовательность управляющих воздействий на органы управления 12 автомобилем и 38 прицепом соответственно и на устройство 37 графической информации для водителя автопоезда (см. Фигуру).
Также подсистемы автомобиля и прицепа дополнительно снабжены устройствами 16 и 31 ввода, корректировки и отображения информации в блок 7 настроечных параметров. Такое дополнение позволяет вводить дополнительные данные в блок 7 настроечных параметров, например при программировании системы адаптивного круиз контроля в соответствии с особенностями предполагаемого маршрута, например, с указанием, где расположены по маршруту движения опасные участки дороги, например такие как, крутые повороты или виражи с отрицательным уклоном, то есть виражи, в которых уклон направлен не классически в сторону наименьшего внутреннего радиуса, а наоборот - в сторону большего внешнего радиуса. В Правилах Дорожного Движения нет предупредительного знака отрицательного уклона виража, а визуально его очень трудно определить. Снижение силы сцепления с дорожным полотном при таком вираже может быть значительным (см. Фигуру 1).
Устройство 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров, дополнительно снабжено блоком 17 оперативного ввода настроечной информации об опасных состояниях, в том числе окружающей среды. Такое дополнение устройства 16 позволяет оперативно изменять настроечную информацию об опасных состояниях, при этом настройки могут меняться, например, при резком и/или внезапном изменении погодных или дорожных условий. Такими изменениями могут быть такие как внезапно начавшийся дождь, снежный шквал, выезд на участок с новым жидким битумно-мастичным гравийным покрытием и т.п. (см. Фигуру 1).
Дополнительное снабжение устройства 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров блоками 17 и 32 оперативного ввода настроечной информации об опасных состояниях и блоками 18 и 33 индикации опасных состояний автомобиля и прицепа соответственно, которые совместно и по отдельности выполнены с возможностью определения опасных состояний, по меньшей мере, по сигналу от одного датчика частоты вращения колес по каждому борту автомобиля и прицепа, что позволяет точно и правильно оценить характер их движения при минимуме информации. Кроме этого установка в подсистемах автомобиля и прицепа блоков 19 и 34 выбора режима передачи информации в устройство графической информации водителя с помощью блоков 35 и 36 позволяет выбрать необходимую информацию и правильно проинформировать водителя об возникающей опасной ситуации у автомобиля, прицепа и автопоезда в целом.
Так же можно дополнительно отметить, что применение в системе контроля и предотвращения дополнительного рыскания колес автомобиля и прицепа в составе автопоезда блока 35 анализа опасных состояний и выбора оптимального варианта и определения последовательности устранения опасных ситуаций и воздействия на органы управления 12 автомобиля (рулевой механизм 13 автомобиля, тормоза 14 автомобиля, акселератор 15 автомобиля) и 38 прицепа (устройство 39 управления поворотом колес прицепа, тормоза 40 прицепа, акселератор 15 автомобиля) управления автомобилем и прицепом на основании выполнения анализа в микроконтроллерных устройствах 5 и 24 обработки информации с исполнением в соответствии с заложенными в них программами согласно исполнению функций блоков 8 и 27 анализа физических параметров датчиков 1, 2, 3, 4 и 20, 21, 22, 23 частот вращения колес автомобиля и прицепа, блоков 9 и 28 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4 и 20, 21, 22, 23 частот вращения колес автомобиля и прицепа, блоков 10 и 29 формирования сигналов, характеризующих состояние и характер движения автомобиля и прицепа, блоков 11 и 30 формирования сигналов для последующих управляющих воздействий системы контроля и предотвращения дополнительного рыскания колес автомобиля и прицепа в составе автопоезда на органы управления 12 автомобилем и 38 прицепом соответственно, позволяет эффективно оценить опасность ситуации и сформировать последовательность управляющих воздействий на органы управления 12 автомобилем и 38 прицепом в составе автопоезда, а также эффективно выбрать оптимальный вариант предотвращения дополнительного рыскания колес автомобиля и прицепа, и определить необходимую последовательность действий для устранения опасных ситуаций путем необходимого и достаточного воздействия системой автопоезда на органы управления 12 автомобиля и 38 прицепа в составе автопоезда при быстро меняющихся условиях окружающей среды, при которых выбирается оптимальная последовательность для процесса управления и воздействия на органы 12 и 38 управления автомобилем и прицепом автопоезда (см. Фигуру).
К числу преимуществ, то есть технических результатов, достигаемых предлагаемой системой контроля и предотвращения дополнительного рыскания колес автопоезда в составе автомобиля и прицепа (прицепов) следует отнести:
- возможность прогнозирования и своевременного предотвращения дополнительного рыскания колес автомобиля и/или прицепа в составе автопоезда до возникновения этих событий, которая достигается путем экстраполяции опасных состояний, в частности, дополнительного рыскания колес;
- низкая стоимость технических средств системы контроля и предотвращения дополнительного рыскания колес автопоезда в составе автомобиля и прицепа, обусловленная отсутствием дополнительных физических датчиков первичной информации, используемых для решения подобных задач в других системах;
- возможность функционирования системы контроля и предотвращения дополнительного рыскания колес автопоезда в составе автомобиля и прицепа в неполной конфигурации датчиков частот вращения колес, включая отказы одного или двух датчиков разных бортов автомобиля и/или прицепа;
- пониженное энергопотребление системы контроля и предотвращения дополнительного рыскания колес автопоезда в составе автомобиля и прицепа, обусловленное отсутствием дополнительных датчиков информации;
- более высокая эксплуатационная надежность системы контроля и предотвращения дополнительного рыскания колес автопоезда в составе автомобиля и прицепа, обусловленная минимальной конфигурацией используемых технических средств, включая датчики первичной информации;
- возможность прогнозирования измеряемых физических переменных и их границ в предлагаемой системе для использования данных в системе, контроля и предотвращения дополнительного рыскания колес автопоезда, например, в системе объективного контроля транспортного средства для их анализа и установления причин ДТП;
- возможность автоматического анализа опасных состояний и выбора оптимального варианта предотвращения дополнительного рыскания колес автомобиля и прицепа в составе автопоезда, и воздействия на их органы управления.
На основании изложенного можно утверждать следующее.
Поставленная техническая задача решается техническими средствами и может быть использована в предложенном виде для оснащения как новых, так и находящихся в эксплуатации автопоездов, состоящих из автомобиля и прицепа, следовательно, предложение соответствует критерию изобретения «промышленная применимость».
Предложение имеет отличия от известной системы работы, следовательно, соответствует критерию изобретения «новизна». Предложение при выполнении работы по сравнению с известными системами позволяет достичь новых, ранее неизвестных технических результатов, следовательно, соответствует критерию изобретения «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предотвращения сноса и заноса колёс системой помощи водителю автопоезда | 2023 |
|
RU2812000C1 |
| Способ предотвращения опрокидывания автопоезда | 2023 |
|
RU2811998C1 |
| Способ определения угловой скорости дополнительного рыскания колёс автопоезда | 2023 |
|
RU2812026C1 |
| Система предотвращения опрокидывания автопоезда | 2023 |
|
RU2811999C1 |
| СИСТЕМА КОНТРОЛЯ И ПРЕДОТВРАЩЕНИЯ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2700209C1 |
| Система идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2812025C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СНОСА И ЗАНОСА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2702878C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
| Система стабилизации безопасной скорости колесного транспортного средства | 2019 |
|
RU2744642C1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2811997C1 |
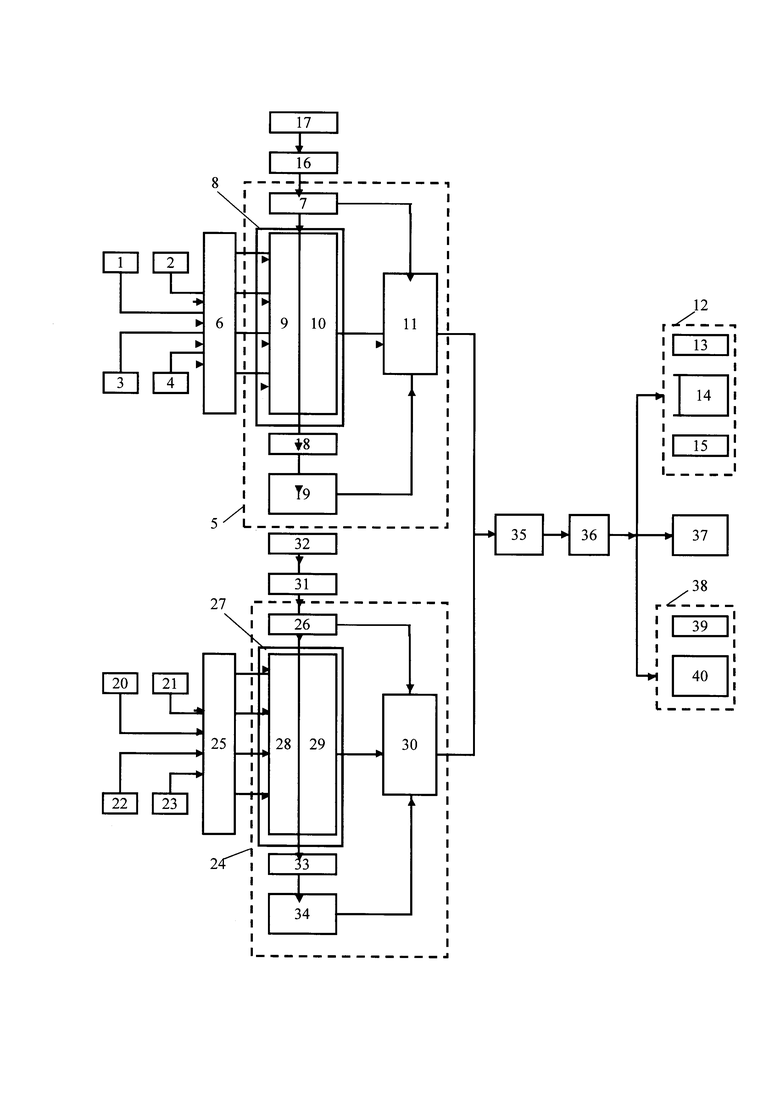
Изобретение относится к системам помощи водителю транспортных средств. Система контроля и предотвращения рыскания колес автомобиля и прицепа в составе автопоезда содержит две отдельные подсистемы контроля и предотвращения дрифта колес автомобиля и прицепа. Датчики (1, 2, 3, 4, 20, 21, 22, 23) частот вращения колес автомобиля и прицепа электрически связаны с микроконтроллерными устройствами (5, 24) обработки информации. Микроконтроллерные устройства (5, 24) включают блоки (7, 26) оценки физических параметров датчиков, блоки (8, 27) анализа параметров датчиков, блоки (9, 28) сравнения с критическими значениями физических параметров датчиков, блоки (10, 29) формирования сигналов, блоки (11, 30) формирования сигналов, устройства (16, 31) ввода, корректировки и отображения информации, блоки (14, 33) индикации опасных состояний, блоки (15, 34) выбора режима и передачи информации об опасных состояниях автомобиля и прицепа, блок (18) индикации опасных состояний, блок (19) выбора режима передачи информации, блок (36) вывода графических данных водителю автопоезда на устройство (37) графической информации. Достигается возможность предотвращения дрифта колес автомобиля и прицепа в составе автопоезда. 1 ил.
Система контроля и предотвращения дополнительного рыскания колес автопоезда, в составе автомобиля и, по меньшей мере, одного прицепа, в которой подсистема контроля и предотвращения дополнительного рыскания колес автомобиля содержит:
датчики (1, 2, 3, 4) частот вращения колес автомобиля, электрически связанные с микроконтроллерным устройством (5) обработки информации автомобиля линиями связи посредством устройства (6) сопряжения,
микроконтроллерное устройство (5) обработки информации, которое включает:
блок (7) настроечных параметров, который выполнен с возможностью оценки физических параметров датчиков (1, 2, 3, 4) частот вращения колес автомобиля и выявления неисправных датчиков, а также - с возможностью исключения из дальнейшего анализа их показаний;
блок (8) анализа параметров датчиков (1, 2, 3, 4) частот вращения колес автомобиля;
блок (9) сравнения с критическими значениями физических параметров датчиков (1, 2, 3, 4) частот вращения колес автомобиля;
блок (10) формирования сигналов, характеризующих состояние и характер движения автомобиля;
блок (11) формирования сигналов для передачи управляющих воздействий на органы (12) управления автомобилем, то есть на рулевой механизм (13), тормоза (14), акселератор (15) автомобиля, при этом
микроконтроллерное устройство (5) автомобиля выполнено с возможностью обработки информации и исполнения, в соответствии с заложенными в нем программами, функций блока (8) анализа физических параметров датчиков (1, 2, 3, 4) вращения колес автомобиля, блока (9) сравнения с критическими значениями физических параметров датчиков (1, 2, 3, 4) частот вращения колес автомобиля, блока (10) формирования сигналов, характеризующих состояние и характер движения автомобиля, блока (11) формирования сигналов для возможности передачи управляющих воздействий на органы (12) управления автомобилем, соответственно на рулевой механизм (13), тормоза (14) и акселератор (15) автомобиля,
блок (7) настроечных параметров выполнен с возможностью оценки физических параметров датчиков (1, 2, 3, 4) частот вращения колес автомобиля и выявления неисправных датчиков, а также - с возможностью исключения из дальнейшего анализа их показаний,
причем подсистема контроля и предотвращения дополнительного рыскания колес автомобиля снабжена устройством (16) ввода, корректировки и отображения информации в блок (7) настроечных параметров, которое снабжено блоком (17) оперативного ввода настроечной информации об опасных состояниях окружающей среды и блоком (18) индикации опасных состояний, выполненными с возможностью определения опасных состояний, по меньшей мере, от одного датчика по сигналу частоты вращения колес по каждому борту,
а также подсистема контроля и предотвращения дополнительного рыскания колес автомобиля снабжена блоком (19) выбора режима передачи информации об опасных состояниях автомобиля,
отличающаяся тем, что система контроля и предотвращения дополнительного рыскания автопоезда дополнительно снабжена подсистемой контроля и предотвращения дополнительного рыскания колес прицепа и подсистемой контроля и предотвращения дополнительного рыскания колес автопоезда в целом,
при этом система контроля и предотвращения дополнительного рыскания колес автопоезда в целом в составе автомобиля и прицепа дополнительно снабжена подсистемой контроля и предотвращения дополнительного рыскания колес прицепа с микроконтроллерным устройством (24) обработки информации прицепа, которое посредством линий связи и устройства (25) сопряжения электрически соединено с импульсными датчиками (20, 21, 22, 23) частот вращения колес прицепа и включает:
блок (26) настроечных параметров оценки физических параметров датчиков (20, 21, 22, 23) частот вращения колес прицепа;
блок (27) анализа параметров датчиков (20, 21, 22, 23) частот вращения колес прицепа;
блок (28) сравнения с критическими значениями физических параметров датчиков (20, 21, 22, 23) частот вращения колес прицепа;
блок (29) формирования сигналов, характеризующих состояние и характер движения прицепа;
блок (30) формирования сигналов для передачи управляющих воздействий на органы (38) управления прицепом, то есть на устройство (39) управления поворотом колес прицепа, тормоза (40) прицепа, акселератор (15) автомобиля,
а также микроконтроллерное устройство (24) обработки информации прицепа выполнено с возможностью обработки информации и выработки управляющих сигналов в соответствии с заложенными в нем программами анализа и управления и с возможностью исполнения функций соответственно блока (27) анализа физических параметров датчиков (20, 21, 22, 23) вращения колес прицепа, блока (28) сравнения с критическими значениями физических параметров датчиков (20, 21, 22, 23) частот вращения колес прицепа, блока (29) формирования сигналов, характеризующих состояние и характер движения прицепа, блока (30) формирования сигналов с возможностью формирования и передачи управляющих воздействий подсистемы прицепа системы контроля и предотвращения дополнительного рыскания колес автопоезда в составе автомобиля и прицепа,
блок (26) настроечных параметров прицепа выполнен с возможностью оценки физических параметров датчиков (20, 21, 22, 23) вращения колес прицепа, с возможностью выявления среди них неисправных датчиков, с возможностью исключения их показаний из дальнейшего анализа,
причем подсистема контроля и предотвращения дополнительного рыскания колес прицепа дополнительно снабжена устройством (31) ввода, корректировки и отображения информации в блок (26) настроечных параметров,
которое дополнительно снабжено блоком (32) оперативного ввода настроечной информации об опасных состояниях окружающей среды и блоком (33) индикации опасных состояний, выполненными с возможностью определения опасных состояний, по меньшей мере, по сигналу от одного действующего датчика частоты вращения колес по каждому борту,
а также подсистема контроля и предотвращения дополнительного рыскания колес автопоезда в целом дополнительно снабжена блоком 34 выбора режима передачи информации об опасных состояниях прицепа,
причем подсистема контроля и предотвращения дополнительного рыскания колес автопоезда в целом, состоящего из автомобиля и прицепа, дополнительно содержит подсистему контроля и предотвращения дополнительного рыскания колес автопоезда, которая снабжена блоком 35 анализа опасных состояний автомобиля и/или прицепа автопоезда, выполненным с возможностью выбора оптимального варианта и определения последовательности устранения опасных ситуаций автопоезда, а также - блоком (36), выполненным с возможностью вывода водителю на устройство (37) графических данных о состоянии автопоезда и передачи управляющих сигналов соответственно на органы (12) управления автомобилем, такие как рулевой механизм (13), тормоза (14) и акселератор (15), и/или на органы (38) управления прицепом, такие как устройство (39) управления поворотом колес прицепа, тормоза (40) прицепа и акселератор (15) автомобиля.
| СИСТЕМА КОНТРОЛЯ И ПРЕДОТВРАЩЕНИЯ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2700209C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2717121C2 |
| СПОСОБ СТАБИЛИЗАЦИИ РЕЖИМА ДВИЖЕНИЯ ГРУЗОВОГО АВТОПОЕЗДА | 2002 |
|
RU2300471C2 |
| ЭЛЕКТРООБОРУДОВАНИЕ АВТОМОБИЛЯ ИЛИ АВТОПОЕЗДА ИЗ ТЯГАЧА И, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ПРИЦЕПА | 2018 |
|
RU2727630C1 |

