Изобретение относится к автомобилестроению, в частности, к способам и устройствам повышения активной безопасности транспортных средств, включая беспилотные.
Известно устройство управления транспортным средством (см. опубликованную заявку КНР № CN 109552324 A, заявители MAZDA MOTOR, опубл. 02.04.2019), которое включает в себя блок управления, выполняющий управление скоростью транспортного средства, блок распознавания ограничения скорости, получающий ограничение скорости на текущем участке движения и блок обнаружения движущегося транспортного средства. В приведенном решении скорость движения автоматически ограничивается в соответствии с информацией, содержащейся в дорожных знаках и данными о дистанциях до попутных препятствий.
Недостатками предлагаемого решения являются отсутствие распознавания состояния шин, в частности, давлений, износов кордов и сцепления с дорогой. Не учитываются как ограничения скорости движения скорости пробуксовки ведущих колес, сноса, заноса и опрокидывания.
Известен способ и устройство для управления автономными транспортными средствами (см. опубликованную заявку КНР № CN 109774708 A, заявители BAIDU ONLINE NETWORK TECHNOLOGY (BEIJING) CO., LTD., опубл. 21.05.2019), включающее устройство управления, модуль определения и модуль получения информации. При выборе скорости учитываются скорость, задаваемая пользователем, ограничение скорости дорожными знаками и информацией о погоде, а также условиями видимости на полосе движения.
Недостатками предлагаемого решения являются отсутствие скоростных ограничений для пробуксовки ведущих колес, заноса и сноса колес и опрокидывания автомобиля. Также не учитывается состояние шин, сопровождающееся асимметрией и создающее предпосылки к дорожно-транспортным происшествиям, в частности, падения давления в шинах, недопустимые износы кордов с их последующими разрывами и т.д.
Известно устройство управления транспортным средством (см. опубликованную заявку Японии № JP 2018134962 A, заявители MAZDA MOTOR, опубл. 30.08.2018), включающее ECU (электронный блок управления), передний радар, переднюю камеру, датчик скорости транспортного средства и различные переключатели. Скорость стабилизации ограничивается данными о видимости, получаемыми от видеокамеры, данными о дистанции до препятствия, получаемыми от радара с соответствующим снижением скорости для повышения комфортности условий водителя.
Недостатками устройства являются отсутствие учета ограничения скорости за счет пробуксовки ведущих колес, сноса, заноса колес и опрокидывания автомобиля, а также отсутствие оценки влияния состояния шин на допустимую скорость движения.
Известно устройство стабилизации скорости транспортного средства и метод для ее осуществления (см. опубликованную заявку Кореи № KR 20140016017 A, заявители SSANGYONG MOTOR СО, опубл. 07.02.2014), которое включает переключатель круиз-контроля ограничения скорости, передний датчик расстояния, приемник информации об ограничении скорости, датчик скорости транспортного средства, тормозной датчик, контроллер, дроссельная заслонка двигателя и тормозной привод. Предложенное техническое решение основано на учете ограничений скорости движения, получаемых по данным спутниковой навигационной системы, устройства технического зрения и задаваемого водителем значения скорости стабилизации.
Недостатками предложенного решения являются отсутствие среди ограничений скорости скоростей сноса, заноса и опрокидывания пробуксовки ведущих колес и ограничения скорости в зависимости от состояния шин, виброускорений и коэффициентов сцепления с поверхностью дороги.
Наиболее близкой по технической сущности является система адаптивного круиз-контроля со стабилизацией курсовой устойчивости и метод для ее осуществления, которая содержит дорожно-информационный и навигационный модуль, радарный модуль миллиметрового диапазона, модуль оценки коэффициента сцепления с дорожным покрытием, модуль определения минимального безопасного расстояния, модуль расчета максимальной скорости транспортного средства на кривой, модуль ESC оценки в реальном времени угла бокового скольжения центра масс автомобиля и скорости рыскания и модуль адаптивного управления скоростью (см. опубликованную заявку КНР № CN 109733398, заявители NANJING UNIVERSITY OF AERONAUTICS AND ASTRONAUTICS, опубл. 10.05.2019). Предложенная система осуществляет стабилизацию скорости и дистанции с учетом ограничений для контроля курсовой устойчивости, основанного на использовании информации о будущей траектории движения, поступающей в навигационную систему транспортного средства и данных о коэффициентах сцепления колес с поверхностью.
Недостатками рассмотренной системы являются отсутствие учета состояния шин и их износа, а также уровня виброускорений и пробуксовки ведущих колес при выборе безопасной скорости стабилизации.
Техническая задача, на решение которой направлено предлагаемое изобретение состоит в стабилизации безопасной скорости колесного транспортного средства с расширенным вектором скоростных ограничений, включающем граничные скорости сближения с попутным транспортным средством, пробуксовки ведущих колес, сноса передних и заноса задних колес, опрокидывания автомобиля, падения давлений и разрыва кордов шин, наличия докатки в колесной схеме и граничные скорости в зоне действия дорожных знаков и уровня виброускорений.
Поставленная техническая задача решается тем, что согласно предложенному изобретению система стабилизации безопасной скорости колесного транспортного средства, содержащая датчики 1, 2, 3, 4 частот вращения колес, электрически связанные с микроконтроллерным устройством 5 обработки информации, посредством линий связи с устройством 6 сопряжения, устройство технического зрения 7, датчик виброускорений 8 и блок ввода и отображения параметров настройки 9, также подключаемые к микроконтроллерному устройству 5 по стандартным интерфейсам,
микроконтроллерное устройство 5 обработки информации включает блок 10 определения параметров движения транспортного средства, блок 11 прогнозирования граничных скоростей, блок 12 регулятора скорости движения транспортного средства,
причем в системе блоки 10 определения, 11 прогнозирования, 12 регулятора выполнены на базе микроконтроллерного устройства 5 с возможностью программного исполнения блока 10 определения параметров движения транспортного средства по сигналам датчиков 1, 2, 3, 4 частот вращения колес, блока 11 прогнозирования граничных скоростей, блока 12 регулятора скорости движения транспортного средства, при этом система дополнительно снабжена блоком 9 ввода и отображения параметров настройки, устройством 13 формирования управляющих воздействий на органы 14 управления транспортного средства: коробка переключения передач 15, акселератор 16, тормоза 17 (см. Фигуру 1).
К числу преимуществ, т.е. технических результатов, достигаемых системой стабилизации безопасной скорости колесного транспортного средства, следует отнести:
- автоматическое ограничение задаваемой скорости транспортного средства, минимальной из задаваемой дорожными знаками и прогнозируемой в зависимости от траектории движения, состояния шин и дорожного покрытия, скоростей сближения с попутным препятствием, сноса и заноса колес, опрокидывания транспортного средства, пробуксовки ведущих колес, наличия докатки в колесной схеме и уровня виброускорений;
- низкая стоимость технических средств, обусловленная отсутствием дополнительных физических датчиков первичной информации, используемых для решения подобных задач в других системах;
- достоверное распознавание дорожных знаков и зон их действия на маршруте движения по данным пройденного пути, независимо от условий освещенности, осадков, тумана и перекрытий видимости;
- возможность функционирования в неполной конфигурации датчиков частот вращения колес, включая отказы одного или двух датчиков разных бортов;
- более высокая эксплуатационная надежность, обусловленная минимальной конфигурацией используемых технических средств.
Технический результат достигается за счет создания системы стабилизации безопасной скорости колесного транспортного средства, в которой блоки связаны определенным образом.
На чертеже (Фигуре 1) показана блок-схема системы стабилизации безопасной скорости колесного транспортного средства.
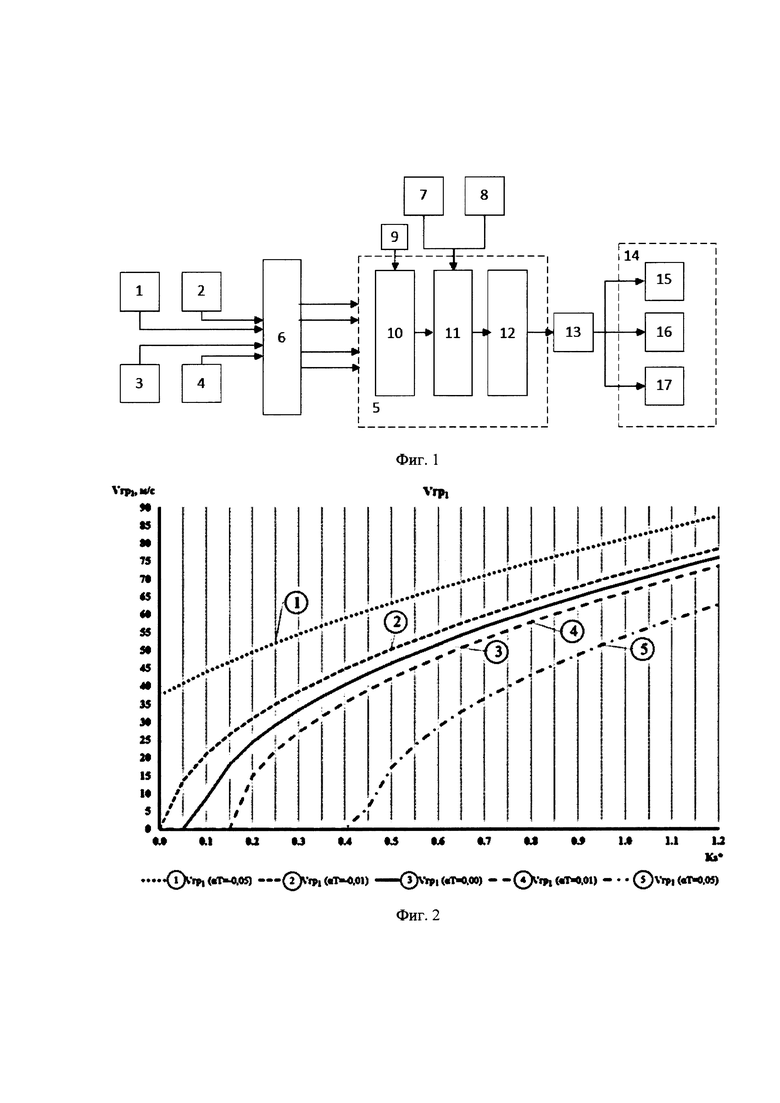
На Фигуре 2 приведены зависимости граничной скорости пробуксовки ведущих колес от максимального значения коэффициента трения скольжения колес при различных углах тангажа для колесного транспортного средства.
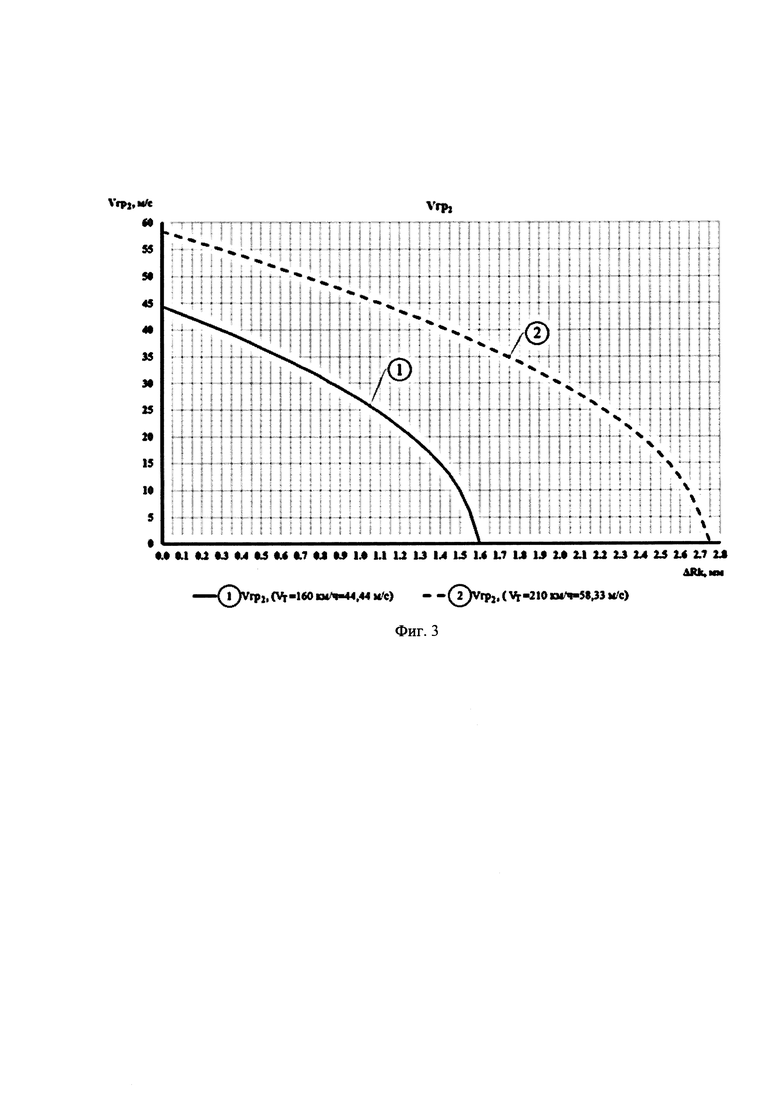
На Фигуре 3 приведены зависимости граничной скорости разрыва корда шины со скоростными индексами от величины износа корда.
Система стабилизации безопасной скорости колесного транспортного средства содержит датчики 1, 2, 3, 4 частот вращения колес, электрически связанные с микроконтроллерным устройством 5 обработки информации, посредством линий связи с устройством 6 сопряжения, устройство технического зрения 7, датчик виброускорений 8, блок ввода и отображения параметров настройки 9, микроконтроллерное устройство 5 обработки информации включает блок 10 определения параметров движения транспортного средства, блок 11 прогнозирования граничных скоростей, блок 12 регулятора скорости движения транспортного средства, устройство 13 формирования управляющих воздействий на органы 14 управления транспортного средства: коробка переключения передач 15, акселератор 16, тормоза 17, отличающаяся тем, что в системе блоки 10 определения, 11 прогнозирования, 12 регулятора выполнены на базе микроконтроллерного устройства 5 с возможностью программного исполнения блока 10 определения параметров движения транспортного средства по сигналам датчиков 1, 2, 3, 4 частот вращения колес, блока 11 прогнозирования граничных скоростей, блока 12 регулятора скорости движения транспортного средства, блок 10 определения параметров движения транспортного средства по сигналам датчиков 1, 2, 3, 4 частот вращения колес выполнен с возможностью по установленной в нем программе производить обработку сигналов датчиков 1, 2, 3, 4 частот вращения колес и получать оценки параметров движения транспортного средства, блок И прогнозирования граничных скоростей выполнен с возможностью прогнозирования граничных скоростей по выходным данным программного блока 10, данным устройства 7 технического зрения, датчика 8 виброускорений и блока ввода и отображения параметров настройки 9 с помощью установленной в нем программы, прогнозирует значения граничных скоростей, критичных для создания предпосылок к ДТП, блок 12 регулятора скорости движения транспортного средства выполнен с возможностью по установленной в нем программе по известным алгоритмам формировать сигналы управления коробкой передач, акселератором и тормозной системой для стабилизации скорости на заданном уровне при этом система дополнительно снабжена блоком 9 ввода и отображения параметров настройки и устройством 13 формирования управляющих воздействий на органы 14 управления транспортного средства: коробка переключения передач 15, акселератор 16, тормоза 17 (см. Фигуру 1).
Предложенная система работает следующим образом.
При движении транспортного средства датчики 1, 2, 3, 4 вырабатывают сигналы о частотах вращения колес транспортного средства, а так как они электрически связаны с микроконтроллерным устройством 5, то эти сигналы посредством линий связи с устройством сопряжения 6 постоянно поступают в микроконтроллерное устройство 5 обработки информации.
Далее, в микроконтроллерном устройстве 5 обработки информации программный блок 10 определения параметров движения транспортного средства по установленной в нем программе (Свидетельство о государственной регистрации программы для ЭВМ №2009616286. Программа «ИНКА-СПОРТ версия 2.0» / Бузников С.Е., Елкин Д.С. // Роспатент, 2009 г.) обрабатывает сигналы от датчиков 1, 2, 3, 4 и получает оценки пройденного пути от точки старта, продольной скорости центра масс, продольного и поперечного ускорения, угла поворота управляемых колес (Свидетельство о государственной регистрации программы для ЭВМ №2007610133 «Автомобильная навигационная ИНКА-система» / Бузников С.Е., Елкин Д.С, Архангельский А.С. // Роспатент, 2006), продольных скольжений колес, давлений воздуха в шинах (Свидетельство о государственной регистрации программы для ЭВМ №2011610428 «Виртуальный датчик давлений в шинах колес транспортных средств» / Бузников С.Е., Елкин Д.С. // Роспатент, 2011), износов кордов шин, температур перегрева шин и тормозов (Свидетельство о государственной регистрации программы для ЭВМ №2010613845 «Виртуальный преобразователь температур перегрева шин и тормозов автомобиля с достраиванием оценок ненаблюдаемых колес» / Бузников С.Е., Елкин Д.С., Шабанов Н.С. // Роспатент, 2010), а также идентифицирует максимальные значения коэффициентов трения скольжения колес (Свидетельство о государственной регистрации программы для ЭВМ №2007610818 «Идентификация максимальных значений коэффициентов трения скольжения колес автомобиля» / Бузников С.Е., Елкин Д.С. // Роспатент, 2007) и состояния органов управления (Свидетельство о государственной регистрации программы для ЭВМ №2007610819 «Идентификация состояния органов управления автомобиля» / Бузников С.Е., Елкин Д.С. // Роспатент, 2006).
В программном блоке 11 прогнозирования граничных скоростей по выходным данным программного блока 10, данным с устройства технического зрения 7, датчика виброускорений 8 и блока ввода и отображения параметров настройки 9 с помощью установленной в нем программы выполняется прогнозирование значений граничных скоростей, включая скорость сближения с попутным транспортным средством, скорости сноса и заноса колес, скорость опрокидывания транспортного средства (Свидетельство о государственной регистрации программы для ЭВМ №2018613551 «Программа стабилизации курсовой устойчивости и предотвращения опрокидывания транспортного средства» / Бузников С.Е., Елкин Д.С., Струков В.О., Шабанов Н.С. // Роспатент, 2018), скорость пробуксовки ведущих колес, скорость, обусловленная допустимым уровнем виброускорений, скорость разрыва кордов шин, скорость движения с докаткой в колесной схеме и скорость, ограниченная дорожными знаками и правилами движения в населенных пунктах и на загородных трассах (Свидетельство о государственной регистрации программы для ЭВМ №2018617757 «Программа идентификации дорожных знаков» / Бузников С.Е., Елкин Д.С., Струков В.О., Луценко Е.В. // Роспатент, 2018). Из полученного множества прогнозируемых граничных скоростей и заданной скорости стабилизации в настроечных данных выбирается минимальная, которая становится входным данным (уставкой) для программного блока 12 регулятора скорости движения транспортного средства (Свидетельство о государственной регистрации программы для ЭВМ №2018617348 «Программа стабилизации безопасных дистанций и скоростей ТС» / Бузников С.Е., Елкин Д.С., Струков В.О. // Роспатент, 2018).
В программном блоке 12 регулятора скорости движения транспортного средства по установленной в нем программе (Свидетельство о государственной регистрации программы для ЭВМ №2018617153 «Программа стабилизации заданной скорости движения ТС» / Бузников С.Е., Елкин Д.С., Струков В.О. // Роспатент, 2018) сравнивают значение уставки скорости стабилизации с продольной скоростью центра масс в зависимости от знака и величины ошибки (разности значений уставки и продольной скорости центра масс) программа регулятора формирует по известным алгоритмам сигналы управления коробкой переключения передач, акселератором и тормозами с целью минимизации модуля ошибки.
Сигналы управления, сформированные в блоке 12 регулятора, поступают в устройство 13 формирования управляющих воздействий на органы 14 управления транспортного средства: коробка переключения передач 15, акселератор 16, тормоза 17.
Отличие конструктивных особенностей предложенной системы и ее функционирования по сравнению с известными конструкциями описаны ниже.
Если в системе блоки 10 определения, 11 прогнозирования, 12 регулятора, выполнены на базе микроконтроллерного устройства 5 в виде программных блоков, функционирующих с возможностью программного исполнения функций блока 10 определения параметров движения, блока 11 прогнозирования граничных скоростей опасных состояний, блока 12 регулятора скорости транспортного средства, то такое выполнение позволяет значительно ускорить процессы определения параметров движения, прогнозирования граничных скоростей опасных состояний и регулирования безопасной скорости движения транспортного средства (см. Фигуру 1).
При этом применение граничной скорости сближения с попутным препятствием в виде суммы скорости попутного препятствия и разности текущего значения дистанции и его граничного значения, умноженной на вещественный коэффициент, задаваемый в настроечных данных, позволяет автоматически сокращать дистанцию между транспортными средствами в колонне до минимальной безопасной, дополнительное снабжение устройством ввода и отображения информации дает возможность внесения координат дорожных знаков на маршруте движения, что позволяет точно и правильно определять действующие скоростные ограничения и правильно информировать водителя о дорожных знаках в зоне их действия.
Граничная скорость пробуксовки ведущих колес Vгр1 определяется из уравнения продольного движения центра масс:

a dT - тягово-тормозное ускорение; kx - коэффициент лобового аэродинамического сопротивления; m0 - полная масса транспортного средства; kтр - коэффициент трения качения шин; αТ - угол тангажа; g - ускорение свободного падения.
Для установившегося режима движения с постоянной скоростью  и при условии равенства тяговых сил силам трения покоя,
и при условии равенства тяговых сил силам трения покоя,  где
где 
 - максимальное значение коэффициента трения скольжения колес; mij - развесовка на ведущих колесах.
- максимальное значение коэффициента трения скольжения колес; mij - развесовка на ведущих колесах.
Величина граничной скорости Vгр1 определяется уравнением:

На Фигуре 2 приведены зависимости граничной скорости пробуксовки ведущих колес от максимального значения коэффициента трения скольжения колес  при различных углах тангажа для транспортного средства с параметрами kx=0.45, m0=1700 кг, kтр=0.012.
при различных углах тангажа для транспортного средства с параметрами kx=0.45, m0=1700 кг, kтр=0.012.
Граничная скорость разрыва корда шины Vгр2 определяется величиной зоны упругой деформации радиуса корда шины и ограничена величиной сил внутреннего давления и центробежной силой, определяемой по скоростному индексу шины. Граничные значения зоны упругих деформаций  где k1 - коэффициент линейного расширения шины в радиальном направлении, равный ~ 1 мм/бар;
где k1 - коэффициент линейного расширения шины в радиальном направлении, равный ~ 1 мм/бар;  - коэффициент, учитывающий влияние центробежной силы на изменение ее радиуса; mT - масса шины; Rc - свободный радиус;
- коэффициент, учитывающий влияние центробежной силы на изменение ее радиуса; mT - масса шины; Rc - свободный радиус;  - ширина профиля шины.
- ширина профиля шины.
Износ корда шины сопровождается растяжением образующих его нитей, их локальным обрывам, что приводит к уменьшению зоны упругих деформаций на величину удлинений нитей корда на величину износа ΔRk. Величина граничной скорости разрыва корда определяется из уравнения 
На Фигуре 3 приведены зависимости граничной скорости разрыва корда шины со скоростными индексами Q (VT = 160 км/ч = 44.44 м/с) и Н (VT = 210 км/ч = 58.33 м/с) от величины износа корда ΔRk при k1=1 мм/бар и kп=0.0008 бар⋅с2м-2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СНОСА И ЗАНОСА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2702878C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702877C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2717121C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702476C1 |
| Система идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779538C1 |
| Система контроля и предотвращения дополнительного рыскания колёс автомобиля | 2023 |
|
RU2812030C1 |
| Система предотвращения опрокидывания автопоезда | 2023 |
|
RU2811999C1 |
| Способ предотвращения опрокидывания автопоезда | 2023 |
|
RU2811998C1 |
Предложена система стабилизации безопасной скорости транспортного средства. Система содержит микроконтроллерное устройство (5). Микроконтроллерное устройство (5) может включать различные программные блоки. Блок (10) определения параметров движения транспортного средства по сигналам датчиков (1, 2, 3, 4) частот вращения колес выполнен с возможностью по установленной в нем программе производить обработку сигналов датчиков (1, 2, 3, 4) частот вращения колес и получать оценки параметров движения транспортного средства. Блок (11) прогнозирования граничных скоростей выполнен с возможностью прогнозирования граничных скоростей по выходным данным программного блока (10), данным устройства (7) технического зрения, датчика (8) виброускорений и блока ввода и отображения параметров настройки (9) с помощью установленной в нем программы, прогнозирует значения граничных скоростей, критичных для создания предпосылок к ДТП. Блок (12) регулятора скорости движения транспортного средства выполнен с возможностью по установленной в нем программе по известным алгоритмам формировать сигналы управления коробкой передач, акселератором и тормозной системой для стабилизации скорости на заданном уровне. Достигается стабилизация безопасной скорости транспортного средства. 3 ил.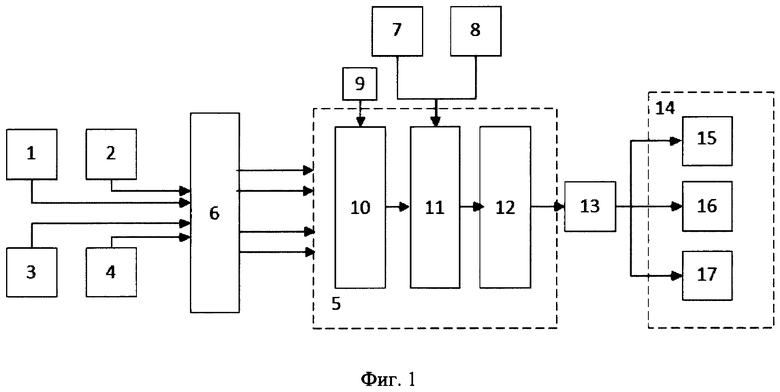
Система стабилизации безопасной скорости колесного транспортного средства содержит датчики (1, 2, 3, 4) частот вращения колес, электрически связанные с микроконтроллерным устройством (5) обработки информации, посредством линий связи с устройством (6) сопряжения, устройство технического зрения (7), датчик виброускорений (8), блок ввода и отображения параметров настройки (9), микроконтроллерное устройство (5) обработки информации включает блок (10) определения параметров движения транспортного средства, блок (11) прогнозирования граничных скоростей, блок (12) регулятора скорости движения транспортного средства, устройство (13) формирования управляющих воздействий на органы (14) управления транспортного средства: коробка переключения передач (15), акселератор (16), тормоза (17), отличающаяся тем, что в системе блоки (10) определения, (11) прогнозирования, (12) регулятора выполнены на базе микроконтроллерного устройства (5) с возможностью программного исполнения блока (10) определения параметров движения транспортного средства по сигналам датчиков (1, 2, 3, 4) частот вращения колес, блока (11) прогнозирования граничных скоростей, блока (12) регулятора скорости движения транспортного средства, блок (10) определения параметров движения транспортного средства по сигналам датчиков (1, 2, 3, 4) частот вращения колес выполнен с возможностью по установленной в нем программе производить обработку сигналов датчиков (1, 2, 3, 4) частот вращения колес и получать оценки параметров движения транспортного средства, блок (11) прогнозирования граничных скоростей выполнен с возможностью прогнозирования граничных скоростей по выходным данным программного блока (10), данным устройства (7) технического зрения, датчика (8) виброускорений и блока ввода и отображения параметров настройки (9) с помощью установленной в нем программы, прогнозирует значения граничных скоростей, критичных для создания предпосылок к ДТП, блок (12) регулятора скорости движения транспортного средства выполнен с возможностью по установленной в нем программе по известным алгоритмам формировать сигналы управления коробкой передач, акселератором и тормозной системой для стабилизации скорости на заданном уровне при этом система дополнительно снабжена блоком (9) ввода и отображения параметров настройки и устройством (13) формирования управляющих воздействий на органы (14) управления транспортного средства: коробка переключения передач (15), акселератор (16), тормоза (17).
| US 2015203117 A1, 23.07.2015 | |||
| МЕТАЛЛОЦЕНЫ С БЕНЗОКОНДЕНСИРОВАННЫМИ ПРОИЗВОДНЫМИ ИНДЕНИЛА, СПОСОБ ИХ ПОЛУЧЕНИЯ, СПОСОБ ПОЛУЧЕНИЯ ОЛЕФИНОВОГО ПОЛИМЕРА И КАТАЛИЗАТОР ПОЛИМЕРИЗАЦИИ ОЛЕФИНОВ | 1992 |
|
RU2098423C1 |
| US 7571967 B2, 11.08.2009. | |||

