Изобретение относится к способу и устройству для измерения расстояния с целью определения места отражения, в частности неисправности, в электрическом проводнике.
В воздушных линиях электропередачи и в подземных кабелях иногда возникают неисправности, например, вследствие обрыва линии, прерывания подземного кабеля или короткого замыкания линии или короткого замыкания на землю. Это может приводить, в частности при очень длинных линиях, к относительно длительному прерыванию тока, когда неизвестно, в каком месте возникла неисправность.
Наряду с пропускающими ток линиями, в которых неисправность можно распознавать по меньшей мере тотчас, интерес представляют также линии без тока, например, в специальном обратном проводе в линиях передачи постоянного тока высокого напряжения, который обычно находится не под напряжением.
Известны следующие способы обнаружения и локализации неисправностей в линиях и кабелях:
Вариант 1: Простейшим видом проверки является визуальный контроль обслуживающим персоналом. Этот способ при длинных линиях требует очень много времени.
Вариант 2: Другой возможностью для измерения положения неисправности является так называемый способ TDR-Puls. При этом электрический импульс подается в линию. В месте неисправности импульс отражается к месту подачи и может там снова приниматься. На основании времени прохождения импульса можно делать вывод о положении неисправности. На этом принципе действия основан прибор ʺPuls-Echo-Electrode Line Monitoring System PEMOʺ фирмы Сименс АГ.
Вариант 3: Другую возможность измерения расстояний обеспечивают так называемые индикаторы ʺFault Passageʺ, которые монтируются в воздушных линиях на определенных расстояниях друг от друга. В случае неисправности индикаторы показывают, между какими индикаторами лежит неисправность. Приборы фирмы Сименс конструктивного ряда FSI основаны на этом способе.
Вариант 4: Кроме того, можно при возникновении неисправности обнаруживать на обоих концах линии/кабеля бегущую волну. Если оба прибора обнаружения на обоих концах линии/кабеля достаточно синхронизированы, то можно с помощью измеряемых данных делать вывод о мете неисправности.
В основе изобретения лежит задача создания точного способа для определения расстояния до места отражения в электрическом проводнике.
Эта задача решена, согласно изобретению, с помощью способа с признаками пункта 1 формулы изобретения. Предпочтительные варианты выполнения способа, согласно изобретению, указаны в зависимых пунктах формулы изобретения.
В соответствии с этим, создается модулированный по частоте и/или фазе электрический подаваемый сигнал, подаваемый сигнал вводится в месте измерения в проводник, в месте измерения измеряется отраженный к месту измерения сигнал, называемый в последующем измерительным сигналом, и на основании частоты и/или фазы измерительного сигнала и на основании фактической частоты и/или фазы подаваемого сигнала в момент прихода измерительного сигнала определяется значение расстояния, которое указывает расстояние до места отражения.
Как будет более подробно пояснено ниже, способ позволяет распознавать, в зависимости от выполнения, неисправность в проводнике и/или определять расстояние до неисправности, независимо от того, распознана ли неисправность в рамках способа или уже распознана с помощью другого внешнего способа.
По сравнению с указанным выше вариантом 1, существенное преимущество способа, согласно изобретению, состоит в том, что можно очень быстро и без расходов на персонал определять местоположение неисправности.
По сравнению с указанным выше вариантом 2, преимущество способа, согласно изобретению, состоит в том, что в линию можно вводить значительно больше энергии, чем это возможно с помощью одного импульса. За счет этого повышается отношение сигнала к шуму, и, кроме того, можно контролировать значительно более длинные линии, чем в указанном выше варианте 2, с помощью лишь одной системы.
По сравнению с вариантами 3 и 4, способ, согласно изобретению, можно применять также в линиях, которые не проводят ток. Также нет необходимости выполнять измерение в момент времени, в котором возникает неисправность. Кроме того, затраты на установку и обслуживание меньше, поскольку измерительный прибор необходимо устанавливать лишь в одном месте, а не в двух или более местах.
Кроме того, предпочтительно, что с помощью способа, согласно изобретению, обеспечивается возможность равномерного распределения вводимой энергии по ширине диапазона или исключения определенных диапазонов частоты, которые нельзя использовать, например, на основании регулирующих предписаний.
Другое преимущество способа, согласно изобретению, состоит в том, что он является относительно не чувствительным к помеховым сигналам импульсных источников помех, таких как, например, вентильные преобразователи переменного тока.
Согласно одному предпочтительному варианту выполнения, предусмотрено, что значение расстояния сравнивается с указывающим расстояние до известного конца проводника опорным значением, и создается сигнал неисправности, когда значение расстояния меньше опорного значения.
При наличии сигнала неисправности предпочтительно выдается значение расстояния в качестве значения расстояния до неисправности.
Согласно другому предпочтительному варианту выполнения, предусмотрено, что после распознавания неисправности в проводнике с помощью внешнего способа распознавания неисправности, и если имеется внешний сигнал неисправности, определяется значение расстояния, и оно выдается в качестве значения расстояния до неисправности.
Предпочтительно, когда в качестве подаваемого сигнала создается частотномодулированный сигнал тем, что частота подаваемого сигнала изменяется во времени в соответствии с заданной функцией изменения, измеряется частота отраженного от мета неисправности к месту измерения измерительного сигнала, и на основании фактической частоты подаваемого сигнала в момент времени прихода измерительного сигнала, определяется указывающее расстояние до места отражения значение расстояния.
Функция изменение предпочтительно является ступенчатой или пилообразной функцией. Другими словами, в качестве частотномодулированного подаваемого сигнала предпочтительно создается подаваемый сигнал со ступенчатым или пилообразным изменением частоты.
Электрический проводник предпочтительно является проводом воздушной линии или кабеля для передачи энергии. Особенно предпочтительно, когда способ используется в обратных проводах линий передачи постоянного тока высокого напряжения. Другими словами, предпочтительно также, когда подаваемый сигнал вводится в обратный провод линии передачи постоянного тока высокого напряжения, который в исправном рабочем состоянии является обесточенным. Контролирование рабочей готовности обратного провода без тока является преимуществом, поскольку при возможной неисправности в системе передачи постоянного тока высокого напряжения возможна необходимость переключения на этот провод.
В качестве подаваемого сигнала в провод вводится предпочтительно частотномодулированный сигнал с постоянной амплитудой.
Частота подаваемого сигнала предпочтительно изменяется в диапазоне между 1 кГц и 1 МГц, при этом изменение частоты во времени, соответственно, производная частоты во времени является постоянной.
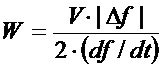
Значение расстояния предпочтительно определяется по формуле
W=
где V - скорость распространения измерительного сигнала в проводнике, W - значение расстояния, ׀Δf׀ - величина разницы частот частоты принятого измерительного сигнала и фактической частоты подаваемого сигнала в момент времени прихода измерительного сигнала, и df/dt - производная во времени частоты подаваемого сигнала.
Частота подаваемого сигнала предпочтительно повышается или понижается в диапазоне между 30 кГц и 500 кГц внутри промежутка времени 1 с.
Подаваемый сигнал вводится в проводник предпочтительно с мощностью между 50 Вт и 150 Вт.
Отраженный измерительный сигнал и подаваемый сигнал предпочтительно смешиваются в смесителе, и на основании частоты смесительного сигнала предпочтительно определяется значение расстояния.
Предпочтительно также, когда подаваемый сигнал подается в проводник через передающий и приемный разделительный фильтр, и отраженный измерительный сигнал принимается через передающий и приемный разделительный фильтр.
В другом варианте выполнения способа предусмотрено, что подаваемый сигнал создается с помощью выходного сигнала генератора цифровых сигналов, включенного после генератора сигналов цифро-аналогового преобразователя и включенного после цифро-аналогового преобразователя усилителя, отраженный измерительный сигнал подается в аналого-цифровой преобразователь, и с помощью выходного сигнала аналого-цифрового преобразователя и цифрового выходного сигнала, созданного генератором цифровых сигналов, определяется значение расстояния.
Предпочтительно, когда отраженный измерительный сигнал сначала демпфируется с помощью демпфирующего звена, и демпфированный сигнал подается в аналого-цифровой преобразователь.
Кроме того, изобретение относится к измеряющему расстояние устройству для определения расстояния до места отражения, в частности неисправности, в электрическом проводнике. Устройство для измерения расстояния, согласно изобретению, характеризуется тем, что предусмотрены источник сигналов для создания модулированного по частоте и/или по фазе электрического подаваемого сигнала, приемный блок для измерения отраженного от места отражения к месту измерения измерительного сигнала, и обрабатывающий блок, который на основании частоты и/или фазы измерительного сигнала и на основании фактической частоты и/или фазы подаваемого сигнала в момент времени прихода отраженного измерительного сигнала определяет подлежащее индикации значение расстояния.
Источник сигналов предпочтительно выполнен так, что он в качестве подаваемого сигнала создает частотномодулированный подаваемый сигнал посредством изменения частоты подаваемого сигнала во времени в соответствии с заданной функцией изменения.
Обрабатывающий блок предпочтительно выполнен так, что он на основании частоты измерительного сигнала и на основании фактической частоты подаваемого сигнала в момент времени прихода измерительного сигнала определяет значение расстояния.
Устройство для измерения расстояния может предпочтительно одновременно передавать и принимать. Другими словами, источник сигналов может подавать подаваемый сигнал, в то время как приемный блок принимает измерительный сигнал, и обрабатывающий блок его оценивает.
Обрабатывающий блок предпочтительно оценивает также фазовое положение измерительного сигнала и на основании фазового положения устанавливает, является ли неисправность коротким замыканием или открытым концом проводника.
Устройство для измерения расстояния предпочтительно содержит приспособление для согласования полных сопротивлений и соединительный конденсатор для ввода подаваемого сигнала и вывода отраженного измерительного сигнала из проводника.
Ниже приводится более подробное пояснение изобретения на основании примеров выполнения со ссылками на прилагаемые чертежи, на которых в качестве примера изображено:
фиг. 1 - установка для передачи энергии, в которой к воздушной линии подключено устройство для измерения расстояния, согласно одному примеру выполнения изобретения;
фиг. 2 - пример выполнения устройства для измерения расстояния, которое используется в установке для передачи энергии, согласно фиг. 1;
фиг. 3 и 4 - примеры изменения частоты во времени для пояснения принципа действия устройства для измерения расстояния, согласно фиг. 2;
фиг. 5 - другой пример выполнения устройства для измерения расстояния, которое пригодно для установки передачи энергии, согласно фиг. 1;
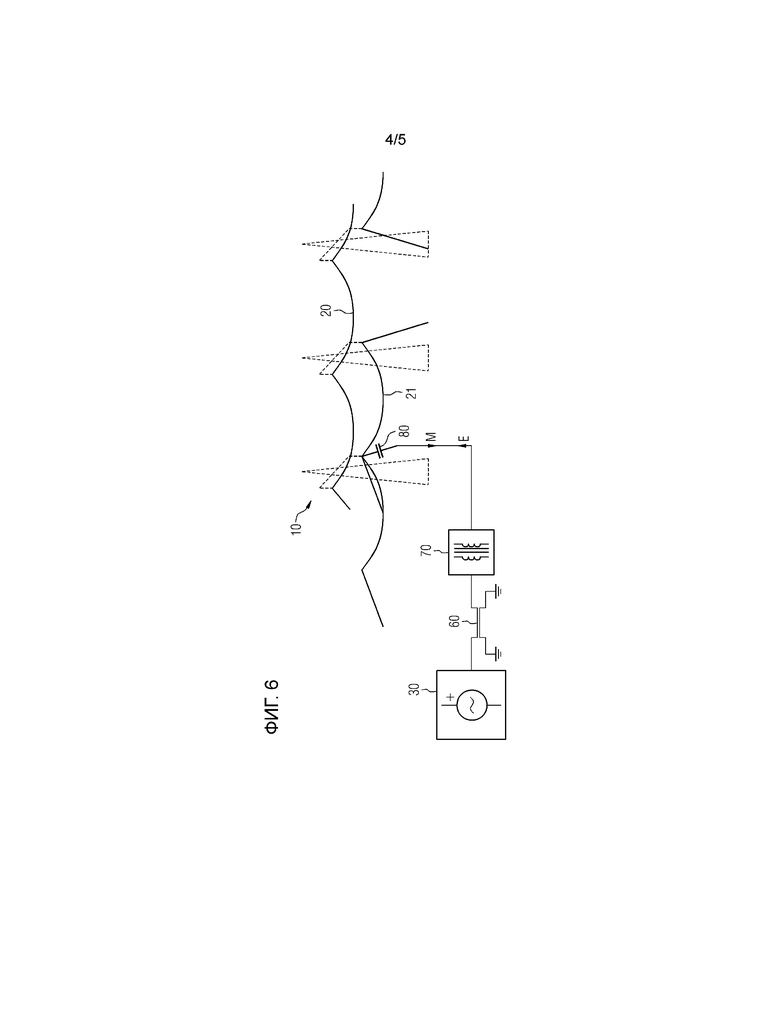
фиг. 6 - другой пример выполнения установки для передачи энергии, в которой к воздушной линии подключено устройство для измерения расстояния;
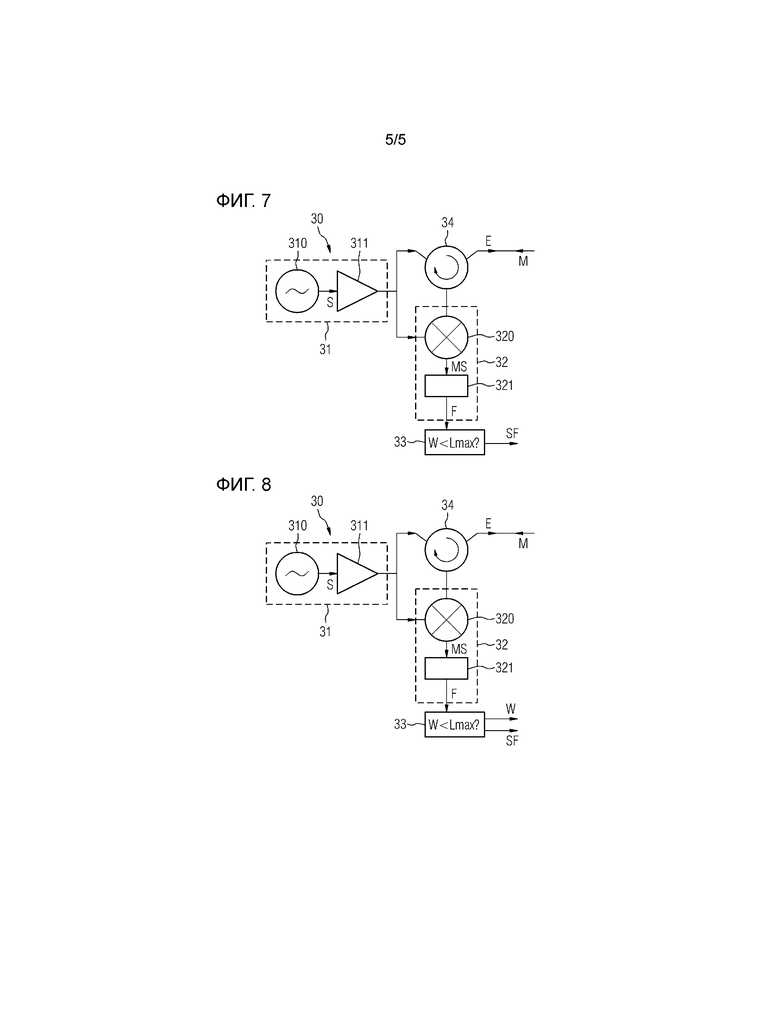
фиг. 7 - пример выполнения устройства для измерения расстояния, в котором осуществляется исключительно контролирование неисправности и, возможно, выдается сигнал неисправности; и
фиг. 8 - пример выполнения устройства для измерения расстояния, в котором осуществляется как контролирование неисправности и, возможно, выдается сигнал неисправности, так и в случае неисправности выдается значение расстояния, т.е. расстояние до неисправности.
На фигурах для ясности идентичные или подобные компоненты везде обозначены одинаковыми позициями.
На фиг. 1 показана передающая энергию установка 10, которая содержит воздушную линию 20. В месте MST измерения к одному проводу 21 воздушной линии подключено устройство 30 для измерения расстояния.
В воздушной линии 20 возникла неисправность: провод 21 прерван в месте FS неисправности. Расстояние между устройством 30 для измерения расстояния, соответственно, местом MST измерения, и местом FS неисправности, т.е. расстояние до неисправности, обозначено на фиг. 1 позицией L.
На фиг. 2 показан пример выполнения устройства 30 для измерения расстояния, которое можно использовать в передающей энергию установке 10, согласно фиг. 1. Устройство 30 для измерения расстояния, согласно фиг. 2, содержит источник 31 сигналов, приемный блок 32, обрабатывающий блок 33 и передающий и приемный разделительный фильтр 34.
Источник 31 сигналов имеет генератор 310 аналоговых сигналов и включенный за ним усилитель 311. Усилитель 311 на стороне выхода соединен с передающим и приемным разделительным фильтром 34 и с приемным блоком 32.
Приемный блок 32 содержит смеситель 320 и измерительный модуль 321. Смеситель 320 на стороне входа соединен с передающим и приемным разделительным фильтром 34 и усилителем 311 и на стороне выхода - с измерительным модулем 321.
Устройство 30 для измерения расстояния, согласно фиг. 1, предпочтительно работает следующим образом:
Сигнальный генератор 310 создает модулированный по частоте или по фазе электрический выходной сигнал S, который усиливается усилителем 311 и в виде модулированного по частоте и/или по фазе электрического подаваемого сигнала Е подается через передающий и приемный разделительный фильтр 34 в провод 21 воздушной линии 20, согласно фиг. 1. Кроме того, электрический подаваемый сигнал Е попадает в смеситель 320 приемного блока 32.
Модулированный по частоте и/или по фазе электрический подаваемый сигнал Е передается через провод 21 к месту FS неисправности и там отражается обратно к передающему и приемному разделительному фильтру 34. Отраженный измерительный сигнал обозначен на фиг. 2 позицией М. Отраженный измерительный сигнал М направляется из передающего и приемного разделительного фильтра 34 в смеситель 320, который смешивает отраженный измерительный сигнал М с подаваемым сигналом Е.
В последующем в качестве примера принимается, что подаваемый сигнал Е является частотномодулированным подаваемым сигналом, частота которого линейно повышается во времени, так что образуется пилообразная функция во времени.
На фиг. 3 показан ход частотной характеристики f подаваемого сигнала Е и частоты отраженного сигнала М в зависимости от времени. Можно видеть, что имеется разница Δf частот между частотой f подаваемого сигнала Е и частотой отраженного измерительного сигнала М. Разница Δf частот вызвана тем, что отраженный измерительный сигнал М приходит в смеситель 320 с задержкой во времени, поскольку он, в отличие от непосредственно подаваемого в смеситель 320 электрического подаваемого сигнала Е, уже прошел через провод 21 к месту FS неисправности и обратно. Время прохождения отражается в показанной на фиг. 3 разнице Δf частот.
Смеситель 320 создает на стороне выхода смесительный сигнал MS, частота которого соответствует разнице Δf частот между подаваемым сигналом Е и отраженным измерительным сигналом М. Таким образом, смесительный сигнал MS, соответственно его частота Δf, является мерой времени прохождения подаваемого сигнала Е до места FS неисправности и обратно, и тем самым мерой расстояния L между устройством 30 для измерения расстояния и местом FS неисправности.
Смесительный сигнал MS измеряется измерительным модулем 321, который выдает на стороне выхода значение F частоты. Значение F частоты указывает частоту Δf смесительного сигнала и тем самым разницу Δf частот между подаваемым сигналом Е и отраженным измерительным сигналом М.
Значение F частоты подается в обрабатывающий блок 33, который с помощью указывающей значение F частоты разницы Δf частот определяет указывающее расстояние L значение W расстояния, предпочтительно следующим образом:
W=
где V - скорость распространения измерительного сигнала в проводнике, W - значение расстояния, ׀Δf׀ - величина разницы частоты принятого измерительного сигнала и фактической частоты подаваемого сигнала T в момент времени прихода измерительного сигнала, и df/dt - производная частоты f во времени t подаваемого сигнала Е.
Таким образом, устройство 30 для измерения расстояния определяет значение W расстояния, соответственно расстояние L, до неисправности на основании разницы Δf частот и крутизны df/dt показанной на фиг. 3 пилообразной функции.
В качестве альтернативного решения или дополнительно, устройство 30 для измерения расстояния может проверять, возникла ли вообще неисправность в проводе 21. Например, устройство 30 для измерения расстояния может измерять для принятого отраженного измерительного сигнала М расстояние до места отражения с образованием значения W расстояния и сравнивать это значение W расстояния с указывающим расстояние до известного конца провода 21 опорным значением Lmax. Когда значение W расстояния меньше, в частности значительно меньше, чем опорное значение Lmax (например, составляет лишь 95% опорного значения Lmax), то оно может выдавать сигнал SF неисправности.
На фиг. 7 показан вариант выполнения устройства 30 для измерения расстояния, в котором осуществляется исключительно контролирование неисправностей и, при необходимости, выдается лишь сигнал SF неисправности; на фиг. 8 показан вариант выполнения устройства 30 для измерения расстояния, в котором осуществляется как контролирование неисправностей и, при необходимости выдается сигнал SF неисправности, так и в случае неисправности дополнительно выдается значение W расстояния, т.е. расстояние до неисправности.
Поскольку показанное на фиг. 3, 7 и 8 повышение вверх частоты технически ограничено, то ход частотной характеристики во времени предпочтительно является пилообразным или треугольным. Например, сигнальный генератор 310 может после достижения верхней предельной частоты переключаться на нижнюю первоначальную частоту, за счет чего обеспечивается пилообразный ход, как показано в качестве примера на фиг. 4.
В связи с фиг. 2-4 и 7-8 было пояснено в качестве примера определение значения W расстояния для частотномодулированного электрического подаваемого сигнала Е; соответствующим образом можно определять значение W расстояния на основании модулированного по частоте и/или по фазе электрического подаваемого сигнала Е, посредством оценки разницы частот и/или разницы фаз между подаваемым сигналом Е и отраженным измерительным сигналом М.
На фиг. 5 показан другой пример выполнения устройства для измерения расстояния, которое можно использовать в установке 10 передачи энергии, согласно фиг. 1.
В отличие от примера выполнения, согласно фиг. 2, устройство 30 для измерения расстояния, согласно фиг. 5, работает без аналогового передающего и приемного разделительного фильтра 34.
Устройство 30 для измерения расстояния, согласно фиг. 5, содержит источник 41 сигналов, приемный блок 42 и обрабатывающий блок 43. Источник 41 сигналов имеет цифровой сигнальный генератор 410, цифро-аналоговый преобразователь 411 и усилитель 412. Обрабатывающий блок 42 образован с помощью демпфирующего звена 420, аналого-цифрового преобразователя 421 и измерительного модуля 422. Выход измерительного модуля 422 и выход цифрового сигнального генератора 410 соединены каждый с обрабатывающим блоком 43.
Устройство 30 для измерения расстояния, согласно фиг. 5, предпочтительно работает следующим образом:
Цифровой сигнальный генератор 410 создает на стороне выхода цифровой модулированный по частоте и/или по фазе выходной сигнал S, который с помощью цифро-аналогового преобразователя 411 преобразуется в аналоговый сигнал, и затем усиливается усилителем 412. Выдаваемый усилителем 412 сигнал образует электрический подаваемый сигнал Е, который подается в провод 21 воздушной линии 20, согласно фиг. 1.
Отраженный от места FS неисправности измерительный сигнал М попадает через демпфирующее звено 420 и аналого-цифровой преобразователь 421 в обрабатывающий блок 43.
Обрабатывающий блок 43 определяет цифровым способом, например, разницу частот между созданным цифровым сигнальным генератором 410 выходным сигналом S и выдаваемым измерительным модулем 422 цифровым измерительным сигналом Md и образует значение W расстояния предпочтительно в соответствии с формулой
W=
где V - скорость распространения измерительного сигнала в проводнике, W - значение расстояния, ׀Δf׀ - величина разницы частот между частотой измерительного сигнала Md и фактической частотой подаваемого сигнала Е в момент времени прихода измерительного сигнала Md, и dt/df - производная во времени t частоты f подаваемого сигнала Е.
Цифровой сигнальный генератор 410, обрабатывающий блок 43 и измерительный модуль 422 могут быть образованы с помощью цифрового сигнального процессора DSP.
В качестве альтернативы или дополнительно, в устройстве 30 для измерения расстояния может быть также предусмотрено распознавание неисправности, как было пояснено выше применительно к фиг. 7 и 8; в этот отношении делается ссылка на приведенные выше выкладки к фиг. 7 и 8.
На фиг. 6 показан вариант выполнения устройства 30 для измерения расстояния, согласно фиг. 1, в котором устройство 30 для измерения расстояния подключено не непосредственно к проводу 21, а через коаксиальный кабель 60, блок 70 согласования полных сопротивлений и соединительный конденсатор 80. В остальном справедливы пояснения в связи с фиг. 1-5 и 7 и 8.
Со ссылками на фиг. 1-8 выше было приведено пояснение примера выполнения для определения расстояния до неисправности на примере одного единственного провода 21; соответствующим образом можно определять расстояния до неисправности в других проводах передающей энергию установки 10.
Поясненные со ссылками на фиг. 1-8 примеры выполнения можно предпочтительно комбинировать с системами линий электроснабжения. Можно также определять, замкнут или разомкнут переключатель или разделитель на линии, поскольку разомкнутый переключатель/разделитель точно также отражает подаваемый сигнал, как и разорванный провод.
Поясненные в качестве примера со ссылками на фиг. 1-8 примеры выполнения можно предпочтительно применять для контролирования проводов и кабелей для передачи постоянного тока высокого напряжения, в частности, для контролирования не ведущих ток в нормальном рабочем состоянии выделенных обратных проводов и линий заземления (линий от станции постоянного тока высокого напряжения до точки заземления). Контролирование готовности к использованию обратного провода предпочтительно, поскольку при возможной неисправности в системе постоянного тока высокого напряжения может быть необходимо переключение на этот провод.
Хотя изобретение подробно показано и пояснено с помощью примеров выполнения, изобретение не ограничивается раскрытыми примерами, и специалистами в данной области техники могут быть выведены другие варианты, без выхода за объем защиты изобретения.
Перечень позиций
10 Установка для передачи энергии
20 Воздушная линия
21 Провод
30 Устройство для измерения расстояния
31 Источник сигналов
32 Приемный блок
33 Обрабатывающий блок
34 Передающий и приемный разделительный фильтр
41 Источник сигналов
42 Приемный блок
43 Обрабатывающий блок
60 Коаксиальный кабель
70 Устройство согласования полных сопротивлений
80 Соединительный конденсатор
310 Сигнальный генератор
311 Усилитель
320 Смеситель
320 Измерительный модуль
410 Сигнальный генератор
411 Цифро-аналоговый преобразователь
412 Усилитель
420 Демпфирующее звено
421 Аналого-цифровой преобразователь
422 Измерительный модуль
DSP Цифровой сигнальный процессор
E Подаваемый сигнал
f Частота
F Значение частоты
FS Место неисправности
L Расстояние до неисправности
Lmax Опорное значение
M Измерительный сигнал
Md Цифровой измерительный сигнал
MS Смесительный сигнал
MST Место измерения
S Выходной сигнал
SF Сигнал неисправности
t Время
W Значение расстояния
Δf Разница частот
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗАЗОРОВ (ВАРИАНТЫ) | 2006 |
|
RU2307999C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОЙ СРЕДЫ | 2010 |
|
RU2436117C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ МЕЖДУ СТЕНОЙ И СТВОРКОЙ, ЗАКРЕПЛЕННОЙ НА ЭТОЙ СТЕНЕ | 2011 |
|
RU2561456C2 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1998 |
|
RU2133483C1 |
| СПОСОБ И УСТРОЙСТВО ДЕТЕКТИРОВАНИЯ КОЛЕС | 2012 |
|
RU2580947C2 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2622407C2 |
| СПОСОБ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ СВОЙСТВ ЖИДКОСТИ | 2006 |
|
RU2332659C1 |
| СХЕМА ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ДАТЧИКА С ГАЛЬВАНИЧЕСКОЙ РАЗВЯЗКОЙ | 2005 |
|
RU2350003C2 |
| ЦИФРОВОЙ СИГНАЛЬНЫЙ ПРОЦЕССОР, УСТРОЙСТВО СВЯЗИ, СИСТЕМА СВЯЗИ И СПОСОБ ЭКСПЛУАТАЦИИ ЦИФРОВОГО СИГНАЛА ПРОЦЕССОРА | 2009 |
|
RU2525830C2 |



Изобретение относится к способу определения расстояния (L) до места отражения в электрическом проводнике (21). Согласно изобретению предусмотрено, что создается модулированный по частоте и/или по фазе электрический подаваемый сигнал (Е), подаваемый сигнал (Е) вводится в месте (MST) измерения в проводник (21), отраженный к месту (MST) измерения сигнал, называемый в последующем измерительным сигналом (М), измеряется в месте (MST) измерения, и на основании частоты (f) и/или фазы измерительного сигнала (М) и на основании фактической частоты (f) и/или фазы подаваемого сигнала (Е) в момент времени прихода измерительного сигнала (М) определяется указывающее расстояние до места отражения значение (W) расстояния. Причем частоту (f) подаваемого сигнала(Е) повышают или понижают в диапазоне между 30–500 кГц внутри промежутка времени 1 с и/или подаваемый сигнал (Е) вводят в проводник (21) с мощностью 50–150 Вт. 2 н. и 18 з.п. ф-лы, 8 ил. 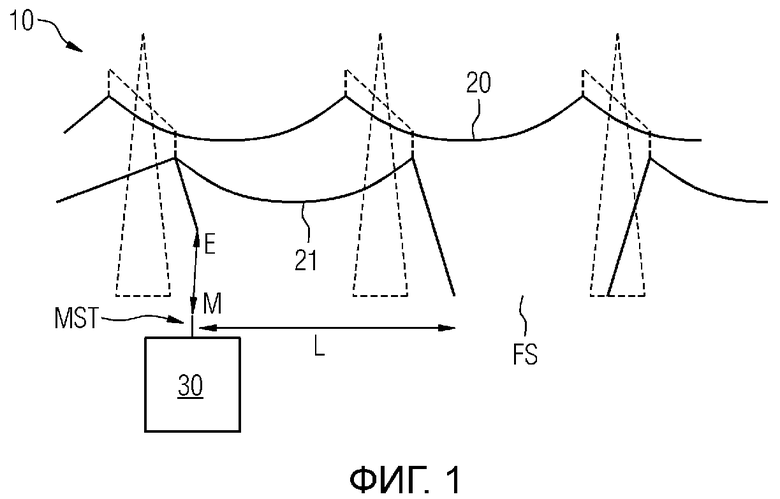
1. Способ определения расстояния (L) до места отражения в электрическом проводнике (21), причем
- генерируют модулированный по частоте и/или по фазе электрический подаваемый сигнал (Е),
- подаваемый сигнал (Е) вводят в месте (MST) измерения в проводник (21),
- отраженный к месту (MST) измерения сигнал, называемый в последующем измерительным сигналом (М), измеряют в месте (MST) измерения и
- на основании частоты (f) и/или фазы измерительного сигнала (М) и на основании фактической частоты (f) и/или фазы подаваемого сигнала (Е) в момент времени прихода измерительного сигнала (М) определяют значение (W) расстояния, указывающее расстояние до места отражения,
- причем частоту (f) подаваемого сигнала (Е) повышают или понижают в диапазоне между 30-500 кГц внутри промежутка времени 1 с, и/или
- подаваемый сигнал (Е) вводят в проводник (21) с мощностью между 50-150 Вт.
2. Способ по п. 1, отличающийся тем, что
- значение (W) расстояния сравнивают с опорным значением (Lmax), указывающим расстояние до известного конца проводника (21), и
- генерируют сигнал (SF) неисправности, когда значение (W) расстояния меньше опорного значения (Lmax).
3. Способ по п. 2, отличающийся тем, что при наличии сигнала неисправности (SF) выдают значение (W) расстояния в качестве значения расстояния до неисправности.
4. Способ по любому из пп. 1-3, отличающийся тем, что после распознавания неисправности в проводнике с помощью внешнего способа распознавания неисправности, и если имеется внешний сигнал неисправности, определяют значение (W) расстояния и его выдают в качестве значения расстояния до неисправности.
5. Способ по любому из пп. 1-4, отличающийся тем, что
- в качестве подаваемого сигнала (Е) генерируют модулированный по частоте сигнал за счет того, что частота (f) подаваемого сигнала (Е) изменяется во времени в соответствии с заданной функцией изменения,
- измеряют частоту (f) измерительного сигнала (М), отраженного от места отражения к месту (MST) измерения, и
- на основании частоты (f) измерительного сигнала (М) и на основании фактической частоты (f) подаваемого сигнала (Е) в момент времени прихода измерительного сигнала (М) определяют значение (W) расстояния, указывающее расстояние до места отражения.
6. Способ по п. 5, отличающийся тем, что
- функция изменения является ступенчатой функцией или пилообразной функцией, и
- в качестве модулированного по частоте подаваемого сигнала (Е) генерируют подаваемый сигнал (Е) со ступенчатым или пилообразным ходом частотной характеристики.
7. Способ по любому из пп. 1-6, отличающийся тем, что подаваемый сигнал (Е) подают в обратный провод линии передачи постоянного тока высокого напряжения, который в исправном рабочем состоянии является обесточенным.
8. Способ по любому из пп. 1-7, отличающийся тем, что в качестве подаваемого сигнала (Е) в проводник (21) вводят модулированный по частоте сигнал с постоянной амплитудой.
9. Способ по любому из пп. 1-8, отличающийся тем, что частоту (f) подаваемого сигнала (Е) изменяют в диапазоне между 1 кГц и 1 МГц, при этом изменение частоты (f) во времени, соответственно производная частоты (f) во времени, является постоянной.
10. Способ по любому из пп. 1-9, отличающийся тем, что значение (W) расстояния определяют по формуле
где V - скорость распространения измерительного сигнала в проводнике, W - значение расстояния, ׀Δf׀ - величина разницы частот между частотой (f) принятого измерительного сигнала (М) и фактической частотой (f) подаваемого сигнала (Е) в момент времени прихода измерительного сигнала (М), и df/dt - производная частоты (f) подаваемого сигнала (E) во времени.
11. Способ по любому из пп. 1-10, отличающийся тем, что отраженный измерительный сигнал (М) и подаваемый сигнал (Е) смешивают в смесителе (320) и на основании частоты (f) смесительного сигнала (MS) определяют значение (W) расстояния.
12. Способ по любому из пп. 1-11, отличающийся тем, что
- подаваемый сигнал (Е) подают в проводник через передающий и приемный разделительный фильтр (34), и
- отраженный измерительный сигнал (М) принимается через передающий и приемный разделительный фильтр (34).
13. Способ по любому из пп. 1-12, отличающийся тем, что подаваемый сигнал (Е) генерируют с помощью выходного сигнала (S) генератора (410) цифровых сигналов, включенного после генератора (410) сигналов цифро-аналогового преобразователя (411) и включенного после цифро-аналогового преобразователя (411) усилителя (412),
- отраженный измерительный сигнал (М) подают в аналого-цифровой преобразователь (421), и
- с помощью выходного сигнала аналого-цифрового преобразователя (421) и цифрового выходного сигнала (S), созданного генератором (410) цифровых сигналов, определяют значение (W) расстояния.
14. Способ по п. 13, отличающийся тем, что
- отраженный измерительный сигнал (М) сначала демпфируют с помощью демпфирующего звена (420), и
- демпфированный сигнал подают в аналого-цифровой преобразователь (421).
15. Способ по любому из пп. 1-14, отличающийся тем, что электрический проводник (21) является проводом (21) воздушной линии или кабелем для передачи энергии.
16. Устройство (30) измерения расстояния для определения расстояния (L) до места отражения, в частности неисправности, в электрическом проводнике (21), содержащее
- источник (31, 41) сигналов для генерирования модулированного по частоте и/или по фазе электрического подаваемого сигнала (Е),
- приемный блок (32, 42) для измерения отраженного от места отражения к месту (MST) измерения измерительного сигнала (М), и
- обрабатывающий блок (33, 43), который на основании частоты (f) и/или фазы измерительного сигнала (М) и на основании фактической частоты (f) и/или фазы подаваемого сигнала (Е) в момент времени прихода отраженного сигнала (Е) определяет значение (W) расстояния, указывающее расстояние до места отражения,
причем частота (f) подаваемого сигнала (Е) повышается или понижается в диапазоне между 30-500 кГц внутри промежутка времени 1 с, и/или
- подаваемый сигнал (Е) вводится в проводник (21) с мощностью между 50-150 Вт.
17. Устройство (30) измерения расстояния по п. 16, отличающееся тем, что
- источник (31, 41) сигналов выполнен так, что он в качестве подаваемого сигнала (Е) создает модулированный по частоте подаваемый сигнал (Е) посредством изменения частоты подаваемого сигнала (Е) во времени в соответствии с заданной функцией изменения, и
- обрабатывающий блок (33, 43) выполнен так, что он на основании частоты (f) измерительного сигнала (М) и на основании фактической частоты (f) подаваемого сигнала (Е) в момент времени прихода измерительного сигнала (М) определяет значение (W) расстояния.
18. Устройство (30) для измерения расстояния по любому из пп. 16 или 17, отличающееся тем, что устройство (30) измерения расстояния выполнено с возможностью одновременно передавать и принимать, следовательно, источник (31, 41) сигналов выполнен с возможностью подавать подаваемый сигнал (Е), в то время как приемный блок (32, 42) принимает измерительный сигнал (М), и обрабатывающий блок (33, 43) оценивает.
19. Устройство (30) измерения расстояния по любому из пп. 16-18, отличающееся тем, что обрабатывающий блок (33, 43) оценивает также фазовое положение измерительного сигнала (М) и на основании фазового положения устанавливает, является ли неисправность коротким замыканием или открытым концом проводника.
20. Устройство (30) измерения расстояния по любому из пп. 16-19, отличающееся тем, что устройство (30) для измерения расстояния содержит приспособление для согласования полных сопротивлений (70) и соединительный конденсатор (80) для ввода подаваемого сигнала (Е) и вывода отраженного измерительного сигнала (М) из проводника.
| RU 2010116509 А, 10.11.2011 | |||
| US 2017199235 А1, 13.07.2017 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2474831C1 |
| Электрически нагреваемый электрод для выполнения хирургических операций | 1948 |
|
SU76139A1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ МЕСТ ПОВРЕЖДЕНИЯ КАБЕЛЬНЫХ ЛИНИЙ ЭЛЕКТРОСНАБЖЕНИЯ | 2013 |
|
RU2539736C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО МЕСТА ПОВРЕЖДЕНИЯ И ДЛИНЫ ПРОВОДОВ И КАБЕЛЕЙ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2098838C1 |
| А | |||
| Л | |||
| КУЛИКОВ, Дистанционное определение мест повреждений ЛЭП методами активного зондирования, с | |||
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |

