Изобретение относится к области ближней локации и, в частности, к измерителям уровня контролируемой среды. Известен способ измерения расстояния [1], являющийся аналогом, состоящий в том, что в направлении контролируемой среды излучают частотно-модулированный сигнал, принимают отраженный от среды сигнал, путем преобразования на смесителе зондирующего и отраженного сигналов получают сигнал разностной частоты (СРЧ), измеряют разностную частоту, по величине которой вычисляют измеряемое расстояние.
Недостаток способа состоит в наличии дискретной ошибки измерения, величина которой может оказаться недопустимо большой. Увеличение точности измерения расстояния при этом возможно за счет увеличения девиации частоты, но при требовании высокой точности величина необходимой девиации может оказаться технически нереализуемой.
Также известны способы измерения расстояния до контролируемой среды [2, 3], являющиеся аналогами и уменьшающие дискретную ошибку. Они основаны на различных способах извлечения информации о расстоянии из СРЧ. Так, в [2] с целью уменьшения дискретной ошибки определяют моменты времени появления характерных точек (например, нулей сигнала разностной частоты), накопление значений весовой функции, соответствующих характерным точкам СРЧ и вычисление расстояния с учетом значений весовой функции.
В способе [3] измерение расстояния производится путем излучения частотно-модулированного сигнала в направлении контролируемой среды, приема отраженного сигнала, получения СРЧ, формирования двух импульсных сигналов в моменты совпадения частоты излучения с двумя заданными эталонными частотами, измерения длительности интервала между этими сигналами, поддержания этого интервала постоянным путем сравнения его с эталонным интервалом времени и необходимого изменения амплитуды симметричного треугольного напряжения модуляции, формирования импульсных сигналов, соответствующих экстремумам СРЧ, изменения знака производной модулирующего треугольного напряжения в момент появления одного из этих импульсов после достижения частотой излучения одного из двух значений эталонных частот, измерения разностной частоты в течение измерительного интервала, выбранного так, чтобы уменьшить дискретную ошибку измерения расстояния до среды.
Аналоги [2, 3] обладают недостатками; требуются повышенные диапазоны перестройки частоты, так как реализованные в них методы обработки требуют достаточно большого числа характерных точек СРЧ при заданном периоде модуляции; вторым недостатком является зависимость ошибки измерения от нелинейности модуляционной характеристики.
Также известен способ измерения расстояния [4], являющийся прототипом, в котором учет нелинейности модуляционной характеристики на ошибку измерения расстояния основан на учете моментов появления характерных точек СРЧ. Недостаток способа заключается в том, что эффективность его зависит от числа характерных точек СРЧ. На малых расстояниях число их уменьшается, что делает необходимым увеличивать диапазон изменения частоты.
Таким образом, и аналоги [2, 3], и прототип [4] реализуют методы обработки сигнала разностной частоты, что требует увеличения диапазона перестройки частоты.
Техническая задача - разработка способа измерения расстояния при минимально необходимом диапазоне перестройки частоты.
1. По первому варианту техническая задача решается следующим образом. В направлении контролируемой среды излучается частотно-модулированный сигнал с симметричной модуляционной характеристикой, принимается отраженный от среды сигнал, путем смешивания его с зондирующим получается сигнал разностной частоты, по нулевым значениям определяется количество полупериодов m сигнала разностной частоты на полупериоде модуляции, измеряется время начала первого полупериода СРЧ - tn, измеряется время окончания m полупериода - tn+m, измеряется частота зондирующего сигнала в моменты tn, tn+m - fn, fn+m, а измеряемое расстояние рассчитывается по формуле (восходящая ветвь модуляционной характеристики):

где ν - скорость электромагнитных волн.
Формула (1) получается из следующих соображений. Разность фаз между зондирующим и отраженным сигналами
где θ - фаза коэффициента отражения, которая весьма мало зависит от частоты.
Для некоторой fn
где n - неизвестное целое число, соответствующее нулевому значению сигнала разностной частоты.
Аналогично, для fn+m

± - соответствуют восходящей и спадающей ветвям модуляционной характеристики.
В предположении, что θn=θn+m, получаем (1).
Ошибка определения R в конечном счете будет определяться погрешностью измерения fn+m, fn. Мы будем исходить из естественного допущения, что ошибки независимы, равны и нормально распределены, тогда

Выражение (2) позволяет оценить связь между среднеквадратическими значениями δf и δR:
Ввиду того, что  , приходим к выражению
, приходим к выражению

В аналогах и прототипе сглаживание ошибки измерения зависит от числа характерных точек СРЧ, т.е. от величины  , которую надо иметь достаточно большой на периоде модуляции несущей. Это достигается за счет увеличения диапазона перестройки частоты, которая составляет 500÷700 МГц.
, которую надо иметь достаточно большой на периоде модуляции несущей. Это достигается за счет увеличения диапазона перестройки частоты, которая составляет 500÷700 МГц.
Из (3) видно, что δR не зависит от m, поэтому девиация частоты выбирается из обеспечения необходимой точности вне зависимости от величины m, что позволяет обойтись меньшей девиацией частоты. Если принять, что измеряемое расстояние лежит в пределах 1÷30 м, a fn+m-fn=150 МГц, то в соответствии с (3) имеем:
R=1 м, δR=0,94·10-6δf [см], δf - [Гц];
R=30 м, δR=2,22·10-5 δf.
Очевидно, что диапазон перестройки частоты 2Δf>fn+m-fn. Для приведенных оценок можно принять 2Δf=200 МГц, при этом точность измерения частоты δf может составлять порядка 105 Гц. Усреднением по нескольким периодам модуляции можно улучшить приведенные оценки.
2. По второму варианту техническая задача решается следующим образом.
В направлении контролируемой среды излучается частотно-модулированный сигнал с симметричной модуляционной характеристикой, принимается отраженный от среды сигнал, путем смешивания его с зондирующим получается сигнал разностной частоты, по нулевым значениям определяется количество полупериодов m сигнала разностной частоты на полупериоде модуляции, измеряется время начала первого полупериода СРЧ - tn, измеряется время окончания m полупериода - tn+m, на смесителе понижается частота зондирующего сигнала с помощью сигнала постоянной частоты f0, совпадающей с центральной частотой зондирующего сигнала. На выходе смесителя частота преобразованного сигнала на интервале полупериода модуляции TM/2 изменяется в пределах от Δf до нуля. Далее преобразованный сигнал поступает на усилитель. Полоса пропускания ΔF выбирается из условия ΔF≥ν/4Rmin (если ν=3·108 м/с, Rmin=1 м, то ΔF≥75 МГц), так что центральная частота усилителя будет равна Δf-ΔF/2. С выхода усилителя сигнал подается на блок измерения в моменты tn, tn+m частот 
 по которым вычисляется расстояние по формуле
по которым вычисляется расстояние по формуле
Такой вариант упрощает процедуру и повышает точность измерения частоты. Выражение (3) в данном варианте принимает вид:

Предлагаемый способ измерения расстояния обладает совокупностью операций, производимых с зондирующим и отраженным сигналами, которые неизвестны для способов и устройств подобного назначения. Из этого следует, что заявляемый способ соответствует критерию «новизна».
Изобретательский уровень можно оценить исходя из следующих особенностей заявляемого способа.
1. Предлагаемый способ требует меньшей девиации частоты, т.к. его точность не зависит от числа характерных точек СРЧ, что имеет место в аналогах [2, 3] и прототипе [4].
2. Из формул (3) и (5) следует, что ошибка определения расстояния по предлагаемому способу зависит только от точности измерения частот  и от их разности (суммы), расстояние неизменно, дискретная ошибка δR=c/8Δf, требующая для ее уменьшения специальных способов обработки СРЧ, отсутствует.
и от их разности (суммы), расстояние неизменно, дискретная ошибка δR=c/8Δf, требующая для ее уменьшения специальных способов обработки СРЧ, отсутствует.
3. Нелинейность модуляционной характеристики сильно увеличивает ошибку измерения, если расстояние измеряется по частоте разностного сигнала, т.е. во всех известных ЧМ-уровнемерах, в предлагаемом способе влияние нелинейности сведется к минимуму, определяемому увеличением ошибки измерения  .
.
Указанные отличия не следуют явно из доступных источников, что позволяет сделать вывод о соответствии заявленного способа критерию «изобретательский уровень».
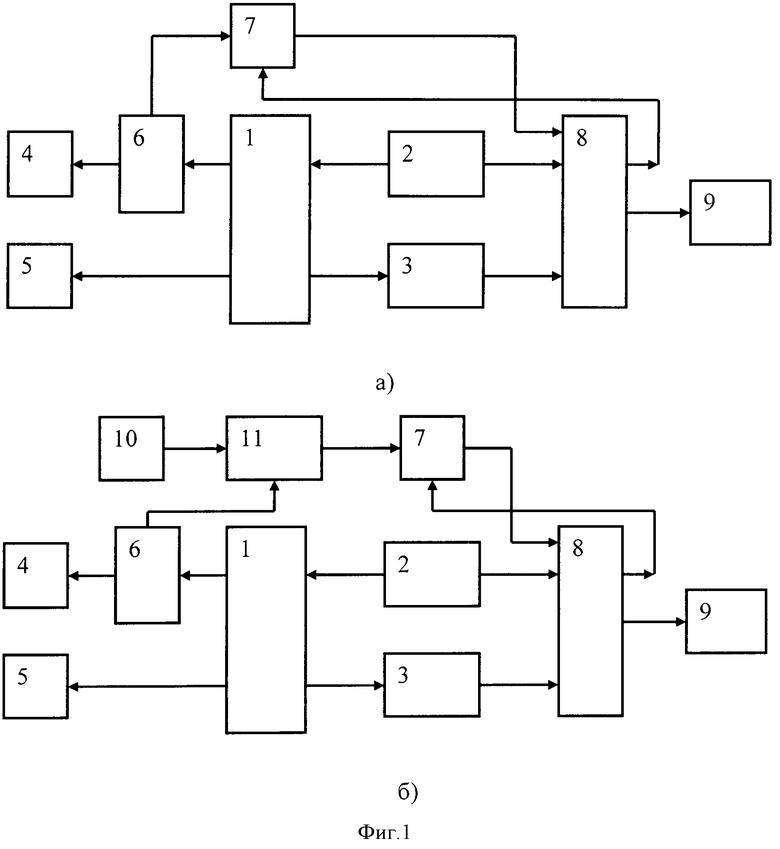
Возможные структурные схемы двух предлагаемых вариантов реализации заявляемого способа приведены на фиг.1, а), б). Входящие в устройства блоки: 1 - приемо-передающий СВЧ-модуль; 2 - модулятор; 3 - блок обработки СРЧ; 4, 5 - передающая и приемная антенны; 6 - направленный ответвитель; 7 - блок измерения частоты; 8 - микропроцессор; 9 - индикатор; 10 - генератор частоты сдвига; 11 - преобразователь и усилитель частоты. Работа схем сводится к следующему. На модулирующий вход приемо-передающего СВЧ модуля 1 с модулятора 2 подается симметричное треугольное напряжение, модулирующее частоту передатчика. С выхода передающей части блока 1 сигнал через направленный ответвитель 6 подается на передающую антенну 4, со второго выхода направленного ответвителя 6 сигнал подается (по варианту фиг.1, а) на блок измерения частоты 7, по варианту фиг.1, б - на блок преобразования и усиления 11, на второй вход которого с генератора 10 подаются колебания частоты f0, равной средней частоте зондирующего сигнала. С выхода блока 11 колебания, частота которых не превышает величину девиации Δf зондирующего сигнала, подаются на блок измерения частоты 7. Отраженный от контролируемой среды сигнал с помощью приемной антенны 5 подается на приемный вход модуля 1. Сигнал разностной частоты с выхода модуля 1 подается на блок 3, где он фильтруется, усиливается, ограничивается, превращаясь в последовательность прямоугольных импульсов, которая подается на один из входов микропроцессора 8. Со второго выхода модулятора 2 на микропроцессор 8 подаются импульсные сигналы, задающие полупериоды модуляции. Микропроцессор 8 на каждом полупериоде модуляции определяет число полупериодов СРЧ m, формирует короткие импульсные сигналы, совпадающие по времени с началом первого и концом m-го периодов СРЧ. Эти сигналы подаются на блок измерения частоты, определяя моменты начала измерения. С выхода блока 7 измеренные значения частоты подаются на микропроцессор 8, где в соответствии с формулами (1) или (4) вычисляется расстояние. Результаты расчета подаются на индикатор 9.
Предлагаемый способ позволяет измерять расстояние с меньшей девиацией по сравнению с методами, основанными на анализе сигнала разностной частоты, что снижает уровень рассогласования СВЧ-тракта, а значит снижает паразитную амплитудную модуляцию сигнала разностной частоты, повышая точность измерения tn и tn+m и, в конечном итоге, расстояния до среды. Снижение девиации частоты упрощает реализацию ЧМ, что особенно существенно при цифровом синтезе частоты зондирующего сигнала. Важным является отсутствие в предлагаемом способе дискретной ошибки, обратно пропорциональной девиации частоты.
Библиографические данные
1. Теоретические основы радиолокации. / Под ред. Я.Д.Ширмана. М.: Сов. радио, 1970. 560 с.
2. Заявка Японии 30-1591, МКИ G01S 13/34. / Изобретения стран мира. 1985. №15.
3. Патент РФ №2151408, G01S 13/34.
4. Патент РФ №2234108 от 10.08.2004 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА НА ОСНОВЕ ЧМ ЛОКАТОРА | 2014 |
|
RU2567866C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОЙ СРЕДЫ С ПОМОЩЬЮ ВОЛНОВОДНОГО ЛЧМ ЛОКАТОРА | 2017 |
|
RU2658558C1 |
| СПОСОБ УМЕНЬШЕНИЯ ДЕВИАЦИИ ЧАСТОТЫ ВОЛНОВОДНОГО УРОВНЕМЕРА С ЛЧМ СИГНАЛОМ | 2018 |
|
RU2693032C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2012 |
|
RU2535927C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ И РАДИОДАЛЬНОМЕР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2017 |
|
RU2655746C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2008 |
|
RU2410650C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2009 |
|
RU2399888C1 |
| БЕСКОНТАКТНЫЙ РАДИОВОЛНОВЫЙ СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ В ЕМКОСТИ | 2015 |
|
RU2611333C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЗОНДИРУЮЩЕГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ ДАЛЬНОМЕРА С ПЕРИОДИЧЕСКОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2003 |
|
RU2234716C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ РАДИОДАЛЬНОМЕРОМ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2017 |
|
RU2654215C1 |
Изобретение относится к области ближней локации и, в частности, к измерителям уровня методом ЧМ-локации. Известны методы измерения расстояния, основанные на анализе сигнала разностной частоты (СРЧ). В заявляемом способе расстояние определяется по измеренным значениям частоты зондирования в два момента времени, соответствующие нулям СРЧ, отстоящим между собой на целое число полупериодов СРЧ. Это позволяет снизить необходимую девиацию частоты зондирующего сигнала. Приводятся два варианта реализации предлагаемого способа. Достигаемый технический результат изобретения - измерение расстояния при минимально необходимом диапазоне перестройки частоты. 2 н.п. ф-лы, 1 ил.
1. Способ измерения расстояния от излучателя до контролируемой среды, включающий излучение в направление среды радиосигнала с периодической частотной модуляцией, прием отраженного сигнала, смешивание его с излучаемым сигналом и получение сигнала разностной частоты, отличающийся тем, что на каждом полупериоде модуляции определяют число полупериодов «m» сигнала разностной частоты, далее определяют время начала первого полупериода tn и время окончания m-го полупериода tn+m, измеряют частоты зондирующего сигнала fn, fn+m, соответствующие указанным моментам времени, а расстояние рассчитывают по формуле:
ν - скорость электромагнитных волн над средой.
2. Способ измерения расстояния от излучателя до контролируемой среды, включающий излучение в направление среды радиосигнала с периодической частотной модуляцией, прием отраженного сигнала, смешивание его с излучаемым сигналом для получения сигнала разностной частоты, смешивание его с несущей частотой зондирующего сигнала, отличающийся тем, что на каждом полупериоде модуляции определяют число полупериодов «m» сигнала разностной частоты, далее определяют время начала первого полупериода tn и время окончания m-го полупериода tn+m, измеряют частоту сигнала, полученного путем понижения частоты зондирующего сигнала на величину несущей частоты в моменты tn, tn+m, а расстояние вычисляют по формуле:
где  ,
,  - измеренные частоты пониженного по частоте зондирующего сигнала; ν - скорость электромагнитных волн над средой.
- измеренные частоты пониженного по частоте зондирующего сигнала; ν - скорость электромагнитных волн над средой.
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2234108C1 |
| РАДИОВОЛНОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2005 |
|
RU2292600C1 |
| ЭХОЛОКАТОР | 1990 |
|
RU2020511C1 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 1992 |
|
RU2032154C1 |
| US 6587074 B1, 01.07.2003 | |||
| WO 2006061913 A, 15.06.2006 | |||
| US 2008100500 A1, 01.05.2008. | |||

