Перекрестная ссылка на родственные заявки
[0001] Настоящее изобретение в соответствии со Сводом законов США 35, §119, заявляет приоритет японской патентной заявки № 2018-032309, поданной 26 февраля 2018 года, и № 2018-178849, поданной 25 сентября 2018 года. Содержание этих заявок полностью включено в настоящее описание путем отсылки.
Область техники
[0002] Настоящее изобретение относится к системе управления транспортным средством. В частности, настоящее описание относится к системе управления транспортным средством, сконфигурированной для управления автоматическим вождением транспортного средства.
Уровень техники
[0003] Заявка JP2016-71514A раскрывает управляющее устройство для поддержки дорожного движения, сконфигурированное для управления автоматическим вождением транспортного средства. Управляющее устройство определяет, удовлетворяются ли условия смены полосы движения, на основании различной информации. Кроме того, если устройство управления обнаруживает, что условия смены полосы движения выполнены, оно предлагает водителю транспортного средства сменить полосу движения. Кроме того, управляющее устройство выполняет необходимую процедуру для автоматической смены полосы движения после получения согласия от водителя.
[0004] Под автоматической сменой полосы движения понимают автоматическое перестроение из полосы разгона (полосы слияния потоков) на основную полосу. При выполнении автоматического перестроения система проверяет, выполняются ли условия автоматического перестроения в основную полосу, на основании различной информации. Однако в отличие от обычной смены полосы движения, при перестроении из полосы разгона необходимо учитывать ограниченную длину полосы разгона. Следовательно, даже если условия автоматического перестроения выполнены, а от водителя получено согласие на автоматическое перестроение, возможна ситуация, в которой потребуется передать водителю другое предложение, заключающееся в переключении с автоматического изменения полосы движения на изменение полосы движения водителем.
[0005] Однако предложение о передаче управления транспортным средством имеет ряд недостатков. То есть, когда управляющее устройство пытается максимально автоматически выполнить перестроение в полосе разгона, у него не будет достаточно времени для предложения о передаче управления. И наоборот, если управляющее устройство пытается оставить как можно больше времени для предложения о передаче управления, ему не хватает времени для автоматического выполнения перестроения.
[0006] Задачей настоящего изобретения является решение вышеописанной проблемы путем разработки системы управления транспортным средством, способной обеспечить баланс между возможностью автоматического перестроения в полосе разгона и обеспечением безопасности движения в полосе разгона.
Сущность изобретения
[0007] Первый аспект настоящего изобретения относится к системе управления транспортным средством, решающей вышеописанную проблему и имеющей следующие признаки.
Система управления транспортным средством сконфигурирована для управления автоматическим перестроением данного транспортного средства из полосы разгона в основную полосу.
Кроме того, система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
определять, выполняется ли заранее заданное условие автоматического перестроения в момент, когда данное транспортное средство достигает первого местоположения в зоне перестроения в пределах полосы разгона;
направлять водителю данного транспортного средства уведомление о необходимости выполнения перестроения водителем, если обнаружено, что условие автоматического перестроения в первом местоположении не выполняется, и не направлять уведомление водителю, если обнаружено, что условие автоматического перестроения в первом местоположении выполняется; а также
если уведомление не было направлено в первом местоположении, направлять уведомление водителю в момент, когда транспортное средство достигает второго местоположения, расположенного между первым местоположением и дальним концом зоны перестроения.
[0008] Второй аспект настоящего изобретения имеет следующие признаки в соответствии с первым аспектом.
Система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
когда транспортное средство достигает третьего местоположения в пределах зоны перестроения, управлять данным транспортным средством так, чтобы данное транспортное средство остановилось в целевом местоположении вблизи дальнего конца; а также
назначать первое и второе местоположения между третьим местоположением и ближним концом зоны перестроения.
[0009] Третий аспект настоящего изобретения имеет следующие признаки в соответствии со вторым аспектом.
Система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
если обнаружено, что условие автоматического перестроения в первом местоположении не выполняется; управлять транспортным средством так, чтобы данное транспортное средство замедлялось на участке перемещения от первого местоположения во второе местоположение, а также
назначать абсолютное значение целевого отрицательного ускорения данного транспортного средства между первым и вторым местоположениями равным значению, которое меньше абсолютного значения отрицательного ускорения между третьим и целевым местоположениями.
[0010] Четвертый аспект настоящего изобретения имеет следующие признаки в соответствии со вторым аспектом.
Система управления транспортным средством дополнительно сконфигурирована для того, чтобы в том случае, если общая длина зоны перестроения превышает расстояние от третьего местоположения до целевого местоположения, изменять первое местоположение на местоположение, которое ближе к третьему местоположению по мере уменьшения расстояния от ближнего конца до первого местоположения.
[0011] Пятый аспект настоящего изобретения относится к системе управления транспортным средством, решающей вышеописанную проблему и имеющей следующие признаки.
Система управления транспортным средством сконфигурирована для управления автоматическим перестроением данного транспортного средства из полосы разгона в основную полосу.
Кроме того, система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
генерировать, на основе информации о дорожной обстановке вокруг данного транспортного средства, информацию о перестроении для автоматического перестроения;
в случае выполнения заранее заданного условия автоматического перестроения управлять данным транспортным средством на основе информации о перестроении так, чтобы данное транспортное средство выполнило автоматическое перестроение;
на основе условия автоматического перестроения и информации о перестроении назначать начальное местоположение, в котором водителю данного транспортного средства направляется уведомление о необходимости выполнения перестроения водителем;
на основе информации о перестроении предварительное назначать первое местоположение зоны перестроения в полосе разгона в качестве начального местоположения;
определять, выполняется ли условие автоматического перестроения в первом местоположении, если перестроение данного транспортного средства не началось до того, как данное транспортное средство достигло первого местоположения;
формальное назначать первое местоположение в качестве начального местоположения, если обнаружено, что условие автоматического перестроения в первом местоположении не выполняется; а также
формальное назначать второе местоположение, находящегося между первым местоположением и дальним концом зоны перестроения, в качестве начального местоположения, если обнаружено, что условие автоматического перестроения в первом местоположении выполняется.
[0012] Шестой аспект настоящего изобретения имеет следующие признаки в соответствии с пятым аспектом.
Система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
когда транспортное средство достигает третьего местоположения в пределах зоны перестроения, управлять данным транспортным средством так, чтобы данное транспортное средство остановилось в целевом местоположении вблизи дальнего конца; а также
назначать первое и второе местоположения между третьим местоположением и ближним концом зоны перестроения.
[0013] Седьмой аспект настоящего изобретения имеет следующие признаки в соответствии с шестым аспектом.
Система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
если обнаружено, что условие автоматического перестроения в первом местоположении не выполняется, управлять транспортным средством так, чтобы данное транспортное средство замедлялось на участке перемещения от первого местоположения до второго местоположения; а также
назначать абсолютное значение целевого отрицательного ускорения данного транспортного средства между первым и вторым местоположениями равным значению, которое меньше абсолютного значения отрицательного ускорения между третьим и целевым местоположениями.
[0014] Восьмой аспект настоящего изобретения имеет следующие признаки в соответствии с шестым аспектом.
Система управления транспортным средством дополнительно сконфигурирована для того, чтобы в том случае, если общая длина зоны перестроения превышает расстояние от третьего местоположения до целевого местоположения, изменять первое местоположение на местоположение, которое ближе к третьему местоположению по мере уменьшения расстояния от ближнего конца до первого местоположения.
[0015] Девятый аспект настоящего изобретения имеет следующие признаки в соответствии с шестым аспектом.
Система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
постоянно назначать третье местоположение с заранее заданным периодом управления до тех пор, пока данное транспортное средство не войдет в полосу разгона и не достигнет ближнего конца, на основе скорости данного транспортного средства и максимального отрицательного ускорения данного транспортного средства в заранее заданном периоде управления;
постоянное назначать первое местоположения на основе назначенного третьего местоположения; и
управлять данным транспортным средством так, чтобы данное транспортное средство замедлялось перед вхождением в зону перестроения, если общая длина зоны перестроения меньше расстояния от третьего местоположения до целевого местоположения.
[0016] В соответствии с первым аспектом уведомление о необходимости выполнения перестроения водителем направляется в том случае, если обнаружено, что условие автоматического перестроения в первом местоположении не выполняется. Следовательно, в этом случае ожидается выполнение перестроения водителем в соответствии с уведомлением о необходимости выполнения перестроения водителем. С другой стороны, если обнаружено, что условие автоматического перестроения в первом местоположении выполняется, уведомление о необходимости выполнения перестроения водителем не направляется. Следовательно, в этом случае ожидается автоматическое перестроение данного транспортного средства после прохождения первого местоположения. Кроме того, даже если уведомление о необходимости выполнения перестроения водителем не было направлено в первом местоположении, уведомление направляется, когда данное транспортное средство достигает второго местоположения. То есть, если автоматическое перестроение, выполнение которого ожидается после прохождения первого местоположения, не будет начато до второго местоположения, уведомление будет принудительно направлено во втором местоположении. Следовательно, в этом случае ожидается выполнение перестроения водителем в соответствии с уведомлением после прохождения второго местоположения. Следовательно, согласно первому аспекту, можно обеспечить баланс между возможностью автоматического перестроения в полосе разгона и обеспечением безопасности движения в полосе разгона.
[0017] Согласно второму или шестому аспекту, когда транспортное средство достигает третьего местоположения, данное транспортное средство управляется таким образом, чтобы оно остановилось в целевом местоположении вблизи дальнего конца зоны перестроения. Это позволяет обеспечить безопасность движения в зоне перестроения.
[0018] Согласно третьему или седьмому аспекту, абсолютное значение целевого отрицательного ускорения между первым и вторым местоположениями назначается разным значению, которое меньше абсолютного значения отрицательного ускорения между третьим и целевым местоположениями. Таким образом, полное замедление выполняется между третьим и целевым местоположениями, в то время как относительно плавное замедление выполняется между первым и вторым местоположениями. Следовательно, можно предложить полное замедление, которое должно начинаться с третьего местоположения, сохраняя при этом запас времени на передачу управления транспортным средством, что дает водителю ощущение безопасности.
[0019] Согласно четвертому или восьмому аспекту, если общая длина зоны перестроения превышает расстояние от третьего местоположения до целевого местоположения, первое местоположение смещается ближе к третьему местоположению, так как расстояние от ближнего конца до первого местоположения уменьшается. Малое расстояние от ближнего конца до первого местоположения означает, что расстояние перемещения, начинающееся при прохождении данного транспортного средства через ближний конец и оканчивающееся при направлении уведомления о необходимости выполнения перестроения водителем, невелико. В связи с этим, когда первое местоположение изменяется на местоположение, более близкое к третьему местоположению, становится возможным увеличить расстояние перемещения, обеспечивая тем самым возможность автоматического перестроения. Следовательно, можно расширить возможности автоматического перестроения в полосе разгона.
[0020] Согласно пятому аспекту, в первом местоположении проверяется выполнение условия автоматического перестроения, если перестроение данного транспортного средства не началось до того, как данное транспортное средство достигло первого местоположения. Первому местоположению временно присваивается статус начального местоположения, в котором направляется уведомление о необходимости выполнения перестроения водителем. Формальное назначение первого местоположения в качестве начального местоположения происходит, если обнаружено, что условие автоматического перестроения в первом местоположении не выполняется. Следовательно, в этом случае ожидается выполнение перестроения водителем в соответствии с уведомлением о необходимости выполнения перестроения водителем. С другой стороны, формальное назначение второго местоположения в качестве начального местоположения происходит, если обнаружено, что условие автоматического перестроения в первом местоположении выполняется. Второе местоположение находится между первым местоположением и дальним концом зоны перестроения. Поэтому, когда второму местоположению формально присваивается статус начального местоположения, направление уведомления о необходимости выполнения перестроения водителем на участке от первого до второго местоположения временно подавляется. Следовательно, в этом случае ожидается автоматическое перестроение данного транспортного средства на участке от первого до второго местоположения. Кроме того, в этом случае ожидается выполнение перестроения водителем после прохождения второго местоположения. Следовательно, согласно пятому аспекту, можно обеспечить баланс между возможностью автоматического перестроения в полосе разгона и обеспечением безопасности движения в полосе разгона.
[0021] Согласно девятому аспекту, если общая длина зоны перестроения меньше расстояния между третьим и целевым местоположениями, замедление данного транспортного средства выполняется до вхождения в зону перестроения. Тот факт, что общая длина зоны перестроения меньше расстояния между третьим и целевым местоположениями, означает, что уведомление о необходимости выполнения перестроения водителем должно быть направлено до ближнего конца зоны перестроения. В связи с этим, если замедление данного транспортного средства выполняется до его вхождения в зону перестроения, третье местоположение можно перемещать в пределах зоны перестроения, в результате чего первое местоположение также перемещается в пределах зоны перестроения. Следовательно, можно обеспечить баланс между возможностью автоматического перестроения в полосе разгона и обеспечением безопасности движения в полосе разгона.
Краткое описание чертежей
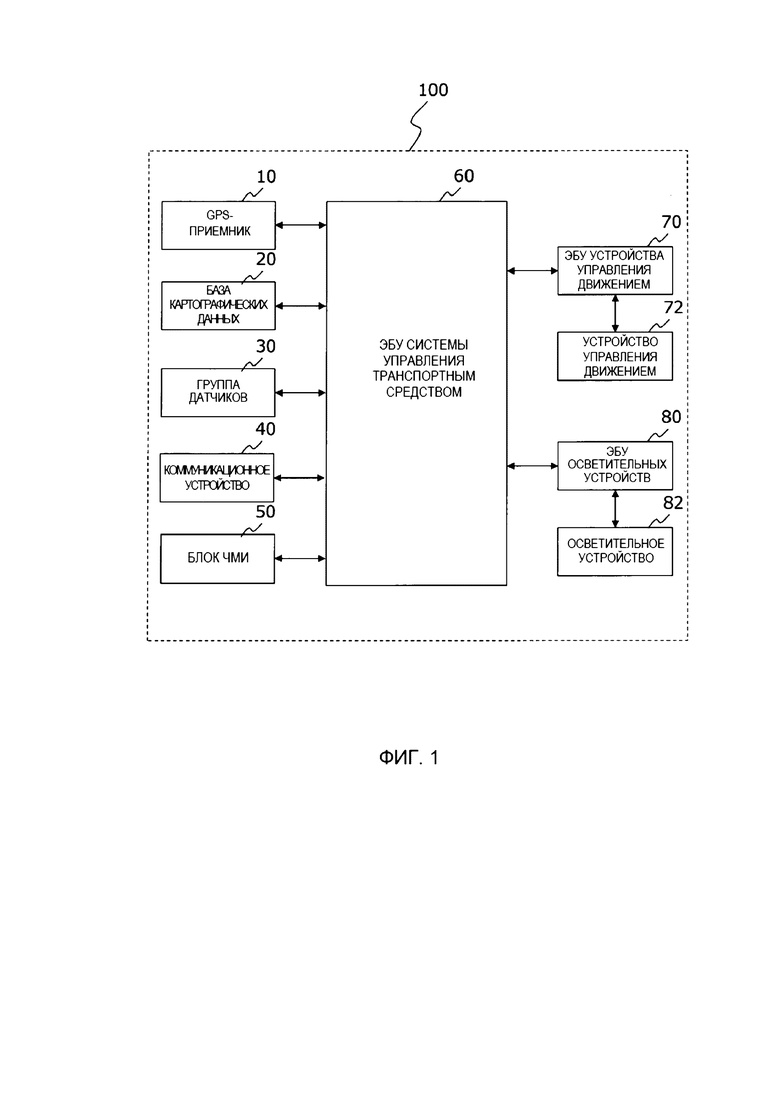
[0022] На ФИГ. 1 изображена схема, демонстрирующая конфигурацию системы управления транспортным средством согласно первому или второму примеру осуществления настоящего изобретения;
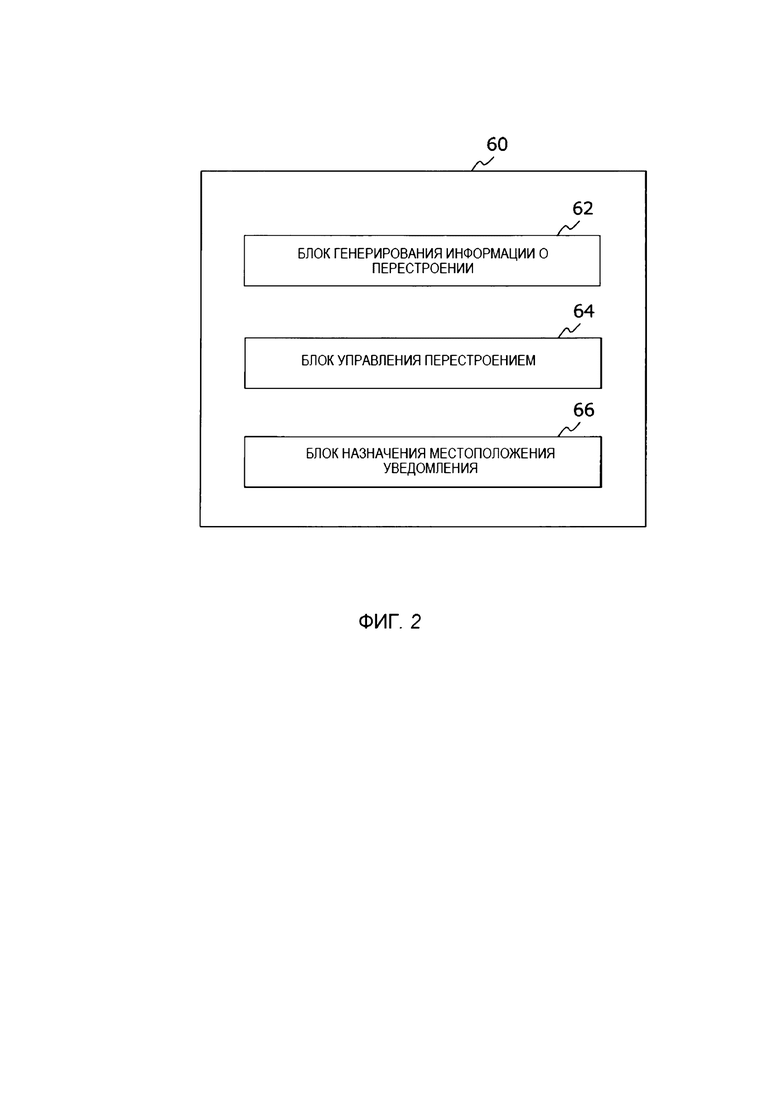
На ФИГ. 2 изображена схема, демонстрирующая пример функциональной структуры электронного блока управления (ЭБУ) системы управления транспортным средством;
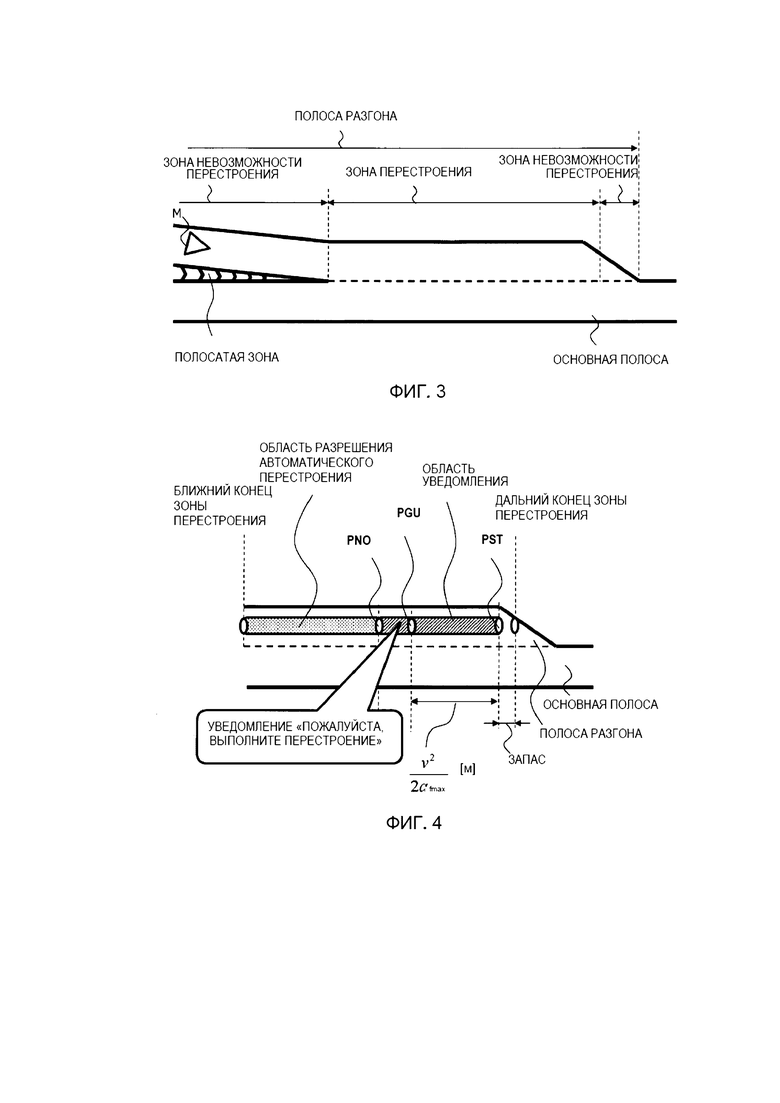
На ФИГ. 3 изображена схема, показывающая зону перестроения и зону продолжения движения в пределах полосы разгона;
На ФИГ. 4 изображена схема, показывающая целевое местоположение PST останова, местоположение PGU отказа и местоположение PNO уведомления водителя (местоположение направления уведомления водителю о необходимости выполнения перестроения водителем), заданные в зоне перестроения;
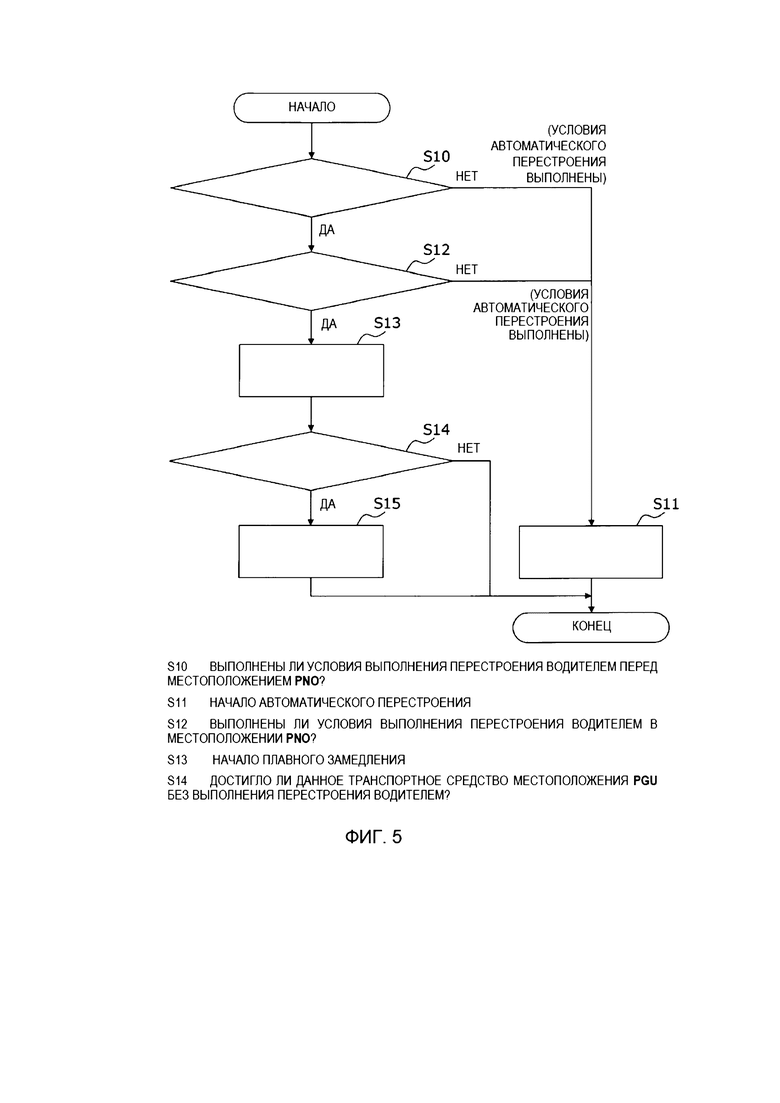
На ФИГ. 5 изображена блок-схема, показывающая процедуру управления перестроением согласно первому примеру осуществления изобретения;
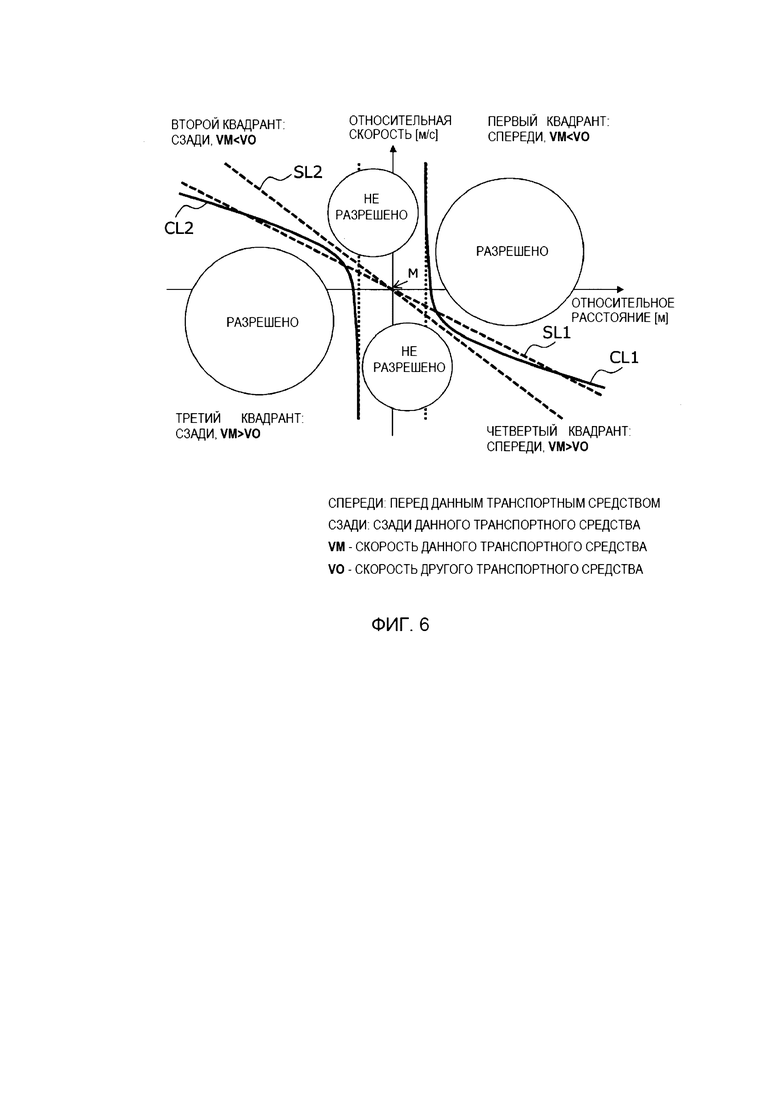
На ФИГ. 6 изображена схема, демонстрирующая пример критериев определения наличия другого транспортного средства, препятствующего перестроению;
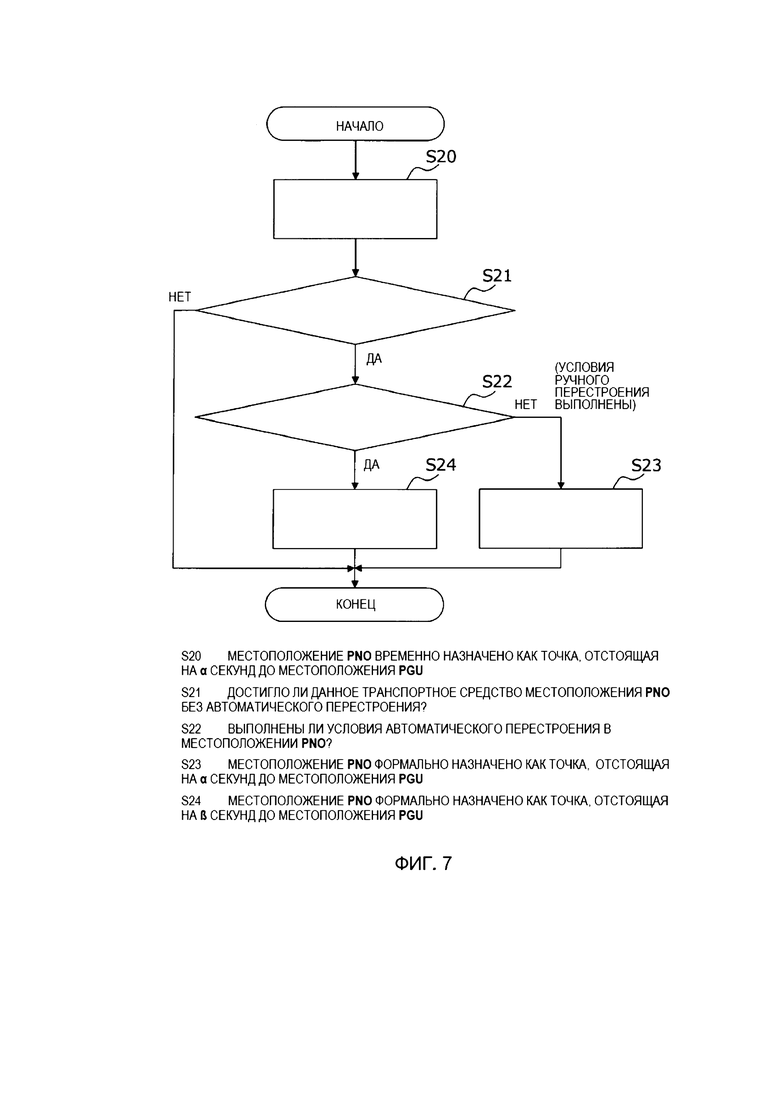
На ФИГ. 7 изображена блок-схема, показывающая процедуру назначения местоположения направления уведомления согласно первому примеру осуществления изобретения;
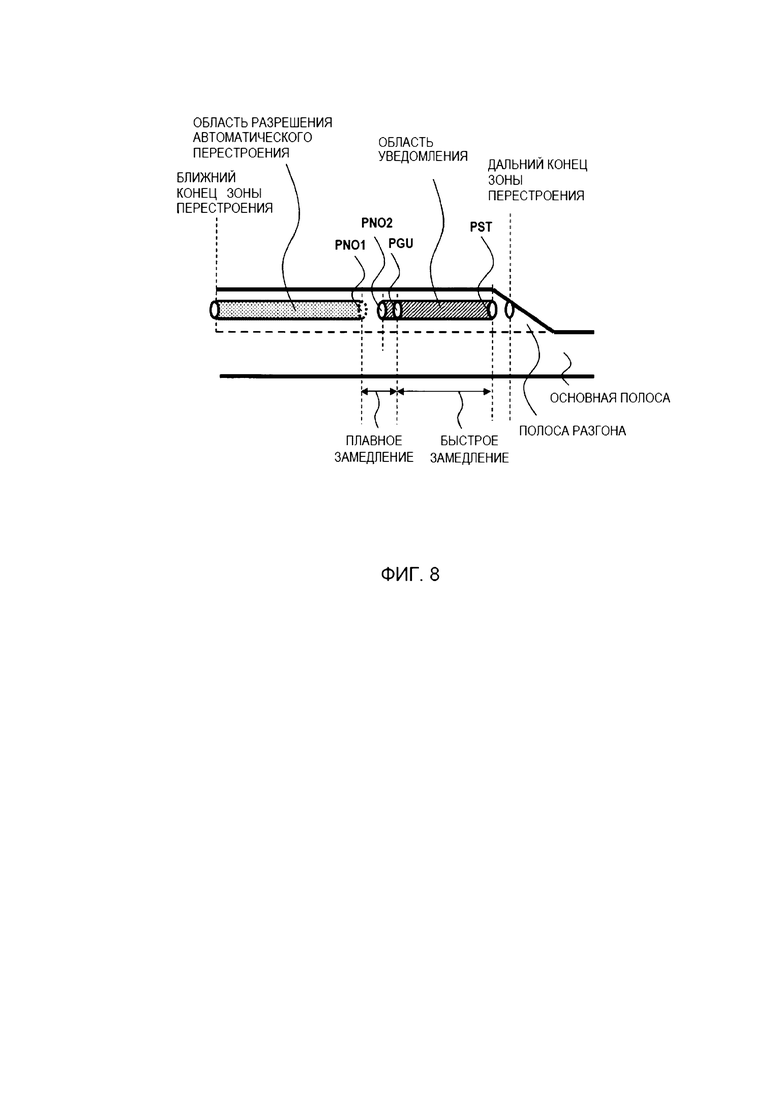
На ФИГ. 8 изображена схема, демонстрирующая полезные эффекты процедуры согласно первому примеру осуществления изобретения;
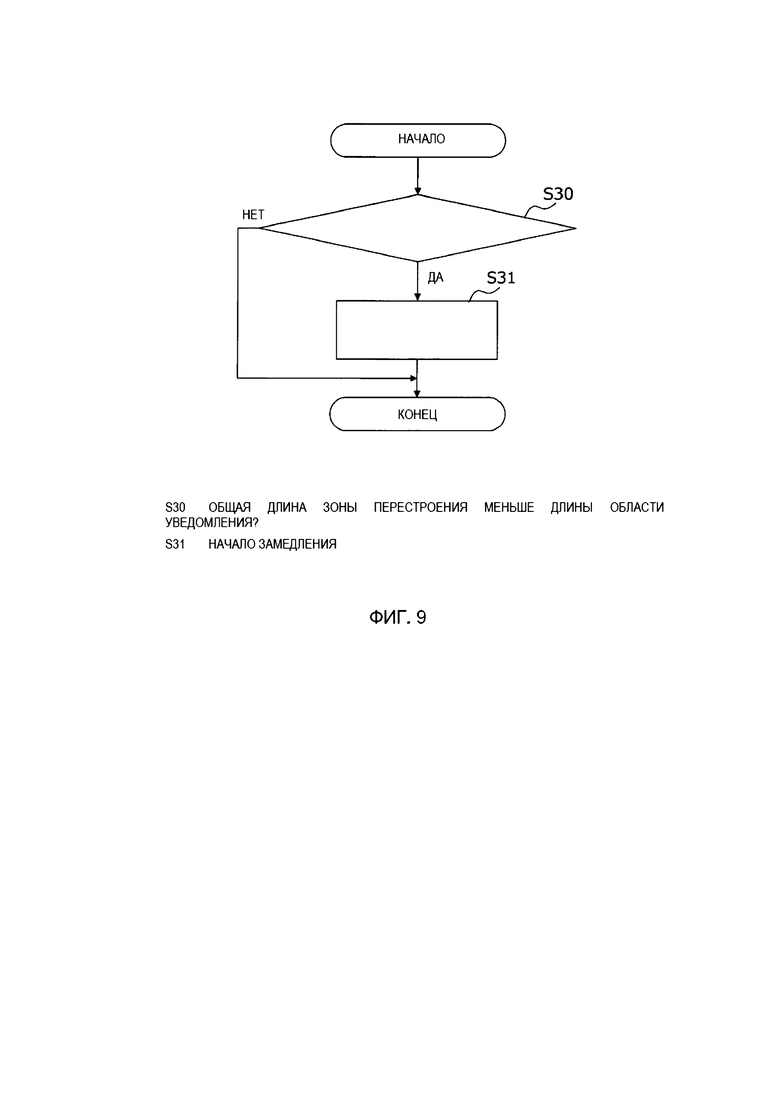
На ФИГ. 9 изображена блок-схема, показывающая процедуру управления перестроением согласно второму примеру 2 осуществления изобретения;
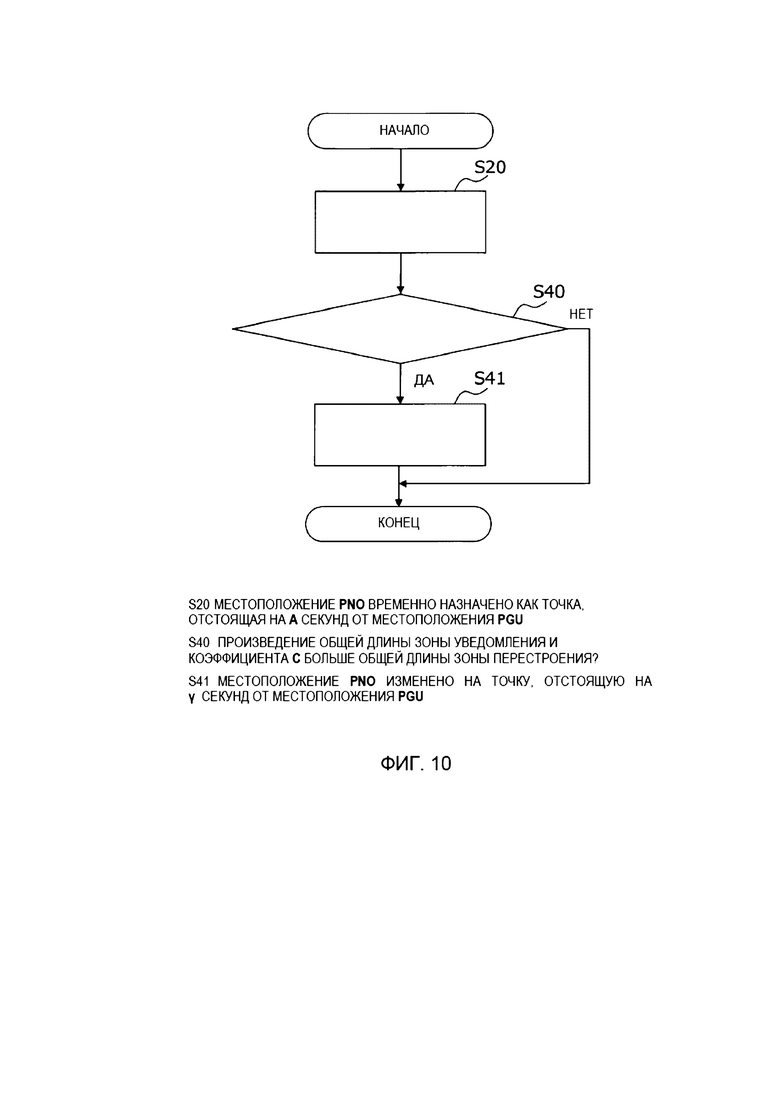
На ФИГ. 10 изображена блок-схема, показывающая процедуру назначения местоположения направления уведомления согласно второму примеру осуществления изобретения;
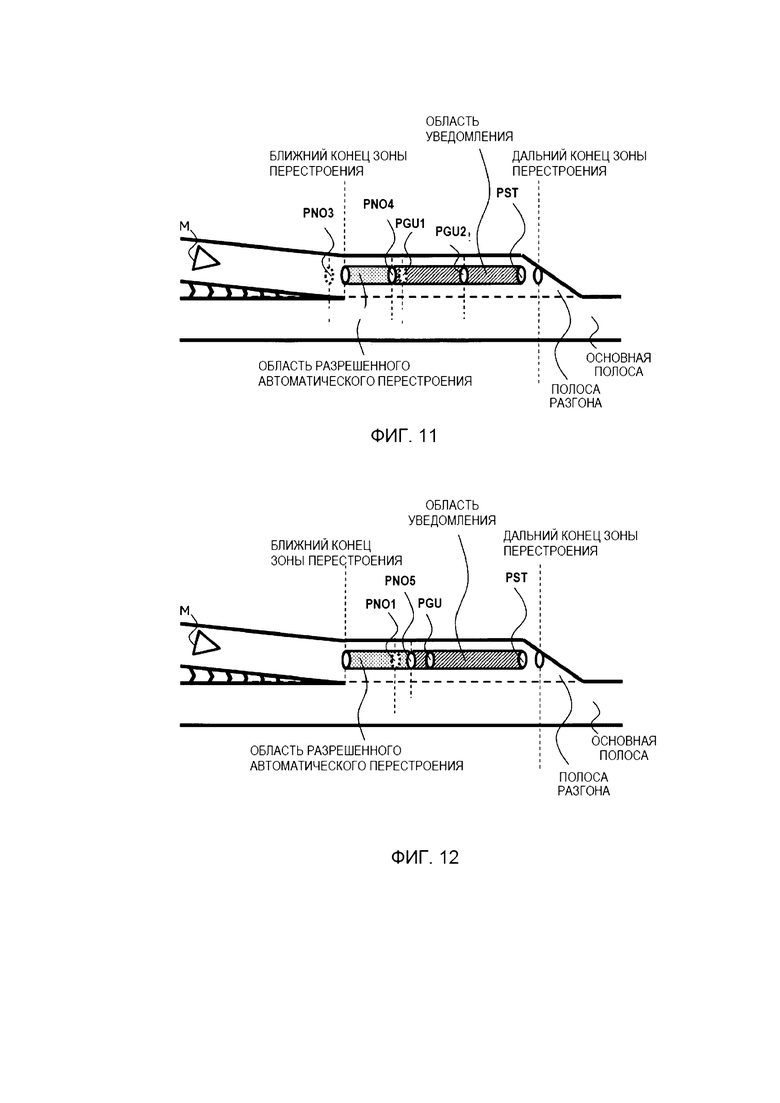
На ФИГ. 11 изображена схема, показывающая полезные эффекты процедуры согласно второму примеру осуществления изобретения; и
На ФИГ. 12 изображена схема, показывающая полезные эффекты процедуры согласно второму примеру осуществления изобретения.
Раскрытие примеров осуществления изобретения
[0023] Примеры осуществления настоящего изобретения будут подробно раскрыты ниже со ссылкой на прилагаемые чертежи. Следует помнить, что элементы, являющиеся общими для соответствующих чертежей, имеют одинаковые ссылочные обозначения, а их описание не повторяется. Кроме того, настоящее изобретение не ограничено описанными ниже примерами осуществления.
[0024] Первый пример осуществления изобретения
Первый пример осуществления настоящего изобретения раскрыт со ссылками на ФИГ. 1–8.
[0025] 1.Конфигурация системы управления транспортным средством
На ФИГ. 1 изображена схема, демонстрирующая конфигурацию системы 100 управления транспортным средством согласно первому примеру осуществления изобретения. Система 100 установлена на транспортном средстве и сконфигурирована для автоматического управления транспортным средством. Транспортное средство, оснащенное системой 100, называют «данным транспортным средством М». Данное транспортное средство М представляет собой, например, транспортное средство, приводимое в движение двигателем внутреннего сгорания, в частности, дизельным или бензиновым двигателем, электрическое транспортное средство, приводимое в движение электродвигателем, или гибридное транспортное средство, оснащенное двигателем внутреннего сгорания и электродвигателем. Электродвигатель питается от аккумуляторов, в частности, вторичных аккумуляторов, водородных, металлических или спиртовых топливных элементов.
[0026] Система 100, изображенная на ФИГ. 1, содержит приемник 10 GPS (глобальной системы позиционирования), базу 20 картографических данных, группу 30 датчиков, коммуникационное устройство 40, блок 50 ЧМИ (человеко-машинного интерфейса), ЭБУ 60 (электронный блок управления) системы управления транспортным средством, ЭБУ 70 устройства управления движением, устройство 72 управления движением, ЭБУ 80 осветительных устройств и осветительное устройство 82.
[0027] Приемник 10 GPS представляет собой устройство, принимающее сигналы от трех и более спутников GPS. Приемник 10 GPS рассчитывает местоположение и ориентацию данного транспортного средства М на основании принятого сигнала. Приемник 10 GPS передает результаты расчета (в дальнейшем также называемые «информацией о местоположении и ориентации») в ЭБУ 60 системы управления транспортным средством.
[0028] База 20 картографических данных хранит картографическую информацию. К такой информации относятся, например, данные о местоположениях, в частности, дорогах, перекрестках, точках слияния и расхождения, форме дороги (например, типе дороги, в частности, прямой или кривой, ширине, уклоне и кривизне дороги), типе дороги (например, скоростной автомагистрали, платной дороге и национальному шоссе), местоположении границы полосы движения. Местоположение границы представлено несколькими точками или несколькими линиями. База 20 картографических данных хранится в заранее заданном запоминающем устройстве (например, на жестком диске или во флэш-памяти).
[0029] Группа 30 датчиков распознает окружение и состояние движения данного транспортного средства М. Группа 30 датчиков передает полученную информацию (в дальнейшем также называемую «информацией датчиков») в ЭБУ 60 системы управления транспортным средством.
[0030] Группа 30 датчиков, распознающая окружение данного транспортного средства М, содержит устройство LIDER (лазерный локатор и определитель дальности), радар миллиметрового диапазона и камеру. Устройство LIDER использует свет для обнаружения ориентира вокруг данного транспортного средства M. Ориентиром рядом с данным транспортным средством M может считаться как движущийся, так и неподвижный ориентир. В качестве примеров движущихся ориентиров можно назвать соседнее транспортное средство, мотоцикл, велосипед и пешехода. Информация о движущемся ориентире содержит данные о местоположении, скорости и размере движущегося ориентира. В качестве примеров неподвижных ориентиров можно назвать придорожный объект, белую линию и дорожный знак. Информация о неподвижном ориентире содержит данные о местоположении и размере неподвижного ориентира. Радар миллиметрового диапазона использует радиоволны для обнаружения ориентира вокруг данного транспортного средства М. Камера снимает обстановку вокруг данного транспортного средства М.
[0031] Группа 30 датчиков, определяющая состояние движения данного транспортного средства M, содержит датчик скорости транспортного средства, датчик тормоза, датчик положения акселератора, датчик крутящего момента рулевого управления и датчик указателей поворота. Датчик скорости транспортного средства определяет скорость данного транспортного средства М. Датчик тормоза определяет величину нажатия педали тормоза. Датчик положения акселератора определяет величину нажатия педали акселератора. Датчик крутящего момента рулевого управления определяет угол поворота (угол руления) рулевого колеса. Датчик указателей поворота определяет состояние переключателя указателей поворота.
[0032] Коммуникационное устройство 40 осуществляет обмен данными между транспортным средством и иным объектом (например, другим транспортным средством или инфраструктурой). В частности, коммуникационное устройство 40 устанавливает связь V2V (то есть связь между транспортными средствами) с другими транспортными средствами. Кроме того, коммуникационное устройство 40 устанавливает связь V2I (то есть связь между транспортным средством и инфраструктурой) с окружающими объектами инфраструктуры. Посредством связи транспортного средства с другими объектами коммуникационное устройство 40 получает информацию об обстановке вокруг данного транспортного средства OV. Коммуникационное устройство 40 передает полученную информацию (в дальнейшем также называемую «информацией связи») в ЭБУ 60 системы управления транспортным средством.
[0033] Блок 50 ЧМИ представляет собой интерфейс для передачи информации водителю и получения информации от водителя. Например, блок 50 ЧМИ содержит устройство ввода, устройство отображения, динамик и микрофон. В качестве примеров устройства ввода можно назвать сенсорную панель, клавиатуру, переключатель и кнопку. Водитель может вводить информацию в блок 50 ЧМИ посредством устройства ввода. Блок 50 ЧМИ передает информацию, введенную водителем, в ЭБУ 60 системы управления транспортным средством.
[0034] ЭБУ 60 системы управления транспортным средством осуществляет автоматическое управление данным транспортным средством М. Обычно ЭБУ 60 системы управления транспортным средством представляет собой микрокомпьютер, содержащий процессор, память и интерфейс ввода и вывода. ЭБУ 60 системы управления транспортным средством получает различную информацию через интерфейс ввода и вывода. После этого ЭБУ 60 системы управления транспортным средством автоматически управляет движением на основании полученной информации.
[0035] В первом примере осуществления изобретения рассматривается автоматическое перестроение в режиме автоматического управления. При автоматическом перестроении полоса, по которой движется данное транспортное средство M (в дальнейшем также называемая «полосой движения»), автоматически изменяется с полосы разгона на основную полосу. При автоматическом перестроении ЭБУ 60 системы управления транспортным средством генерирует информацию о перестроении, необходимую для автоматического перестроения, и передает ее на ЭБУ 70 устройства управления движением и ЭБУ 80 осветительных устройств.
[0036] ЭБУ 70 устройства управления движением представляет собой микрокомпьютер с конфигурацией, аналогичной ЭБУ 60 системы управления транспортным средством. ЭБУ 70 устройства управления движением состоит из нескольких ЭБУ. Эти ЭБУ соответствующим образом управляют устройством 72 управления движением в соответствии с информацией о перестроении, передаваемой ЭБУ 60 системы управления транспортным средством. Устройство 72 управления движением имеет электронное управление и содержит устройство управления движущей силой, устройство рулевого управления и тормозное устройство. Устройство управления движущей силой представляет собой источник мощности, сконфигурированный для создания движущей силы. Устройство рулевого управления сконфигурировано для управления углом поворота колес. Тормозное устройство создает силу торможения.
[0037] ЭБУ 80 осветительных устройств представляет собой микрокомпьютер с типичной конфигурацией, аналогичной конфигурации ЭБУ 60 системы управления транспортным средством. ЭБУ 80 осветительных устройств управляет работой осветительных устройств 82 в соответствии с информацией о перестроении, передаваемой ЭБУ 60 системы управления транспортным средством. Осветительное устройство 82 имеет электронное управление и содержит переднюю фару, задний фонарь, указатель поворота и стоп-сигнал.
[0038] 2. Конфигурация ЭБУ 60 системы управления транспортным средством
На ФИГ. 2 изображена схема, демонстрирующая пример конфигурации функции автоматического перестроения ЭБУ 60 системы управления транспортным средством. Как показано на ФИГ. 2, ЭБУ 60 системы управления транспортным средством содержит блок 62 генерирования информации о перестроении, блок 64 управления перестроением и блок 66 назначения местоположения уведомления. Эти функциональные блоки реализуются, когда процессор ЭБУ 60 системы управления транспортным средством выполняет программу управления, хранящуюся в запоминающем устройстве. Программа управления может быть записана на машиночитаемом носителе информации.
[0039] 2.1. Блок 62 генерирования информации о перестроении
Блок 62 выполняет процедуру с целью формирования информации о перестроении, необходимой для осуществления автоматического перестроения, на основе информации о дорожной обстановке. Информация о дорожной обстановке описывает обстановку вокруг данного транспортного средства М. Под информацией о дорожной обстановке понимают информацию о местоположении и ориентации, картографическую информацию, информацию датчиков и информацию связи. Информация о перестроении содержит информацию о траектории движения, информацию о целевом местоположении останова, информацию о местоположении отказа и информацию о местоположении уведомления водителя.
[0040] Под информацией о траектории движения понимают информацию о траектории движения с полосы разгона на основную полосу. Информацию о траектории движения получают, например, на основании информации о дорожной обстановке. Траектория движения определяется набором целевых местоположений, с которыми должно совпадать опорное местоположение данного транспортного средства М (например, центр тяжести данного транспортного средства М или центр оси заднего колеса) во время автоматического перемещения вдоль полосы разгона и во время автоматического перестроения. Траектория движения задается каждый раз, когда истекает заранее заданное время, используя текущее время в качестве опорного значения. Способ задания такой траектории движения не ограничен, и к первому примеру осуществления изобретения применимы известные способы настройки. Следует отметить, что в первом примере осуществления изобретения траектория движения задается независимо от выполнения условий автоматического перестроения, описанных ниже. Таким образом, информация о траектории движения генерируется каждый раз, когда истекает заранее заданное время, пока данное транспортное средство M движется по полосе разгона.
[0041] Информация о целевом местоположении останова, информация о местоположении отказа и информация о местоположении уведомления водителя соответствует целевому местоположению PST останова, местоположению PGU отказа и местоположению PNO уведомления водителя. Эти местоположения PST, PGU и PNO задаются в пределах полосы разгона. Эта информация генерируется на основе, например, информации о местоположении и ориентации и картографической информации. Подобно информации о траектории движения, эта информация генерируется каждый раз, когда истекает заранее заданное время, пока данное транспортное средство M движется по полосе разгона. Местоположения PNO, PGU и PST будут описаны со ссылкой на ФИГ. 3 и 4.
[0042] Как показано на ФИГ. 3, полоса разгона разделена на зону перестроения и зону невозможности перестроения. Зоной перестроения считают зону, примыкающую к основной полосе движения. Таким образом, зона перестроения представляет собой зону, в которой физически возможно перестроение данного транспортного средства М в основную полосу движения. Один конец границы между зоной перестроения и зоной невозможности перестроения расположен, например, на вершине полосатой зоны (буферной зоны). В другом примере один конец границы расположен на оконечности дорожной конструкции, расположенной между основной полосой движения и полосой разгона. Другой конец границы расположен на оконечности полосы разгона. Под границей на оконечности понимают, например, местоположение, в котором ширина полосы в поперечном направлении совпадает с шириной обычного транспортного средства. Местоположения PNO, PGU и PST находятся между дальним концом и ближним концом зоны перестроения.
[0043] На ФИГ. 4 изображен увеличенный вид периферии зоны перестроения, показанной на ФИГ. 3. Местоположение PST определяют как точку, в которой данное транспортное средство M должно остановиться окончательно, при условии, что данное транспортное средство M движется по полосе разгона без выполнения автоматического перестроения. Местоположение PST определяют как точку, отстоящую от дальнего конца зоны слияния, с некоторым запасом (например, 5 метров). Местоположение PGU определяют как точку, в которой данное транспортное средство M должно отказаться от автоматического перестроения. Местоположение PGU представляет собой, например, местоположение, отстоящее от местоположения PST на величину пути перемещения (v2/2amax), если данное транспортное средство M, движущееся со скоростью v, замедляется с максимальным отрицательным ускорением amax. Местоположение PNO определяют как точку, в которой водителю направляется уведомление о необходимости выполнения перестроения водителем (например, «пожалуйста, выполните перестроение») в качестве предварительного этапа отказа от автоматического перестроения. За местоположение PNO принимают, например, точку, от которой данное транспортное средство М, движущееся со скоростью v, достигает местоположения PGU за α секунд (например, 4,0 секунды).
[0044] В нижеследующем описании уведомление о необходимости выполнения перестроения водителем также называют «уведомлением о перестроении водителем». Область от местоположения PNO до местоположения PST также называют «областью уведомления», в которой, по существу, выполняется передача уведомления о необходимости выполнения перестроения водителем. Область от ближнего конца зоны перестроения до местоположения PNO также называют «областью разрешения автоматического перестроения», в которой, по существу, выполняется автоматическое перестроение.
[0045] 2.2. Блок 64 управления перестроением
Блок 64 выполняет процедуру с целью управления движением данного транспортного средства М, движущегося по полосе разгона (в дальнейшем также называемую «процедурой управления перестроением»), на основе информации о дорожной обстановке и перестроении. Процедура управления перестроением будет детально описана со ссылкой на ФИГ. 5.
[0046] На ФИГ. 5 изображена блок-схема, демонстрирующая порядок управления перестроением согласно первому примеру осуществления изобретения. В алгоритме, показанном на ФИГ. 5, сначала проверяется выполнение условий выполнения перестроения водителем в местоположении перед местоположением PNO (этап S10). В частности, местоположение перед местоположением PNO является произвольным местоположением в пределах области разрешения автоматического перестроения. Произвольное местоположение может содержать два и более местоположений. То есть процедура, выполняемая на этапе S10, может повторяться два и более раз.
[0047] Условиями выполнения перестроения водителем являются следующие условия C1-C4.
C1: Имеется другое транспортное средство, препятствующее перестроению данного транспортного средства М.
C2: Лампа указателя поворота не горела в течение заранее заданного времени.
C3: Скорость данного транспортного средства М на ближнем конце зоны перестроения меньше заданной скорости.
C4: Устройство управления движущей силой, устройство рулевого управления или тормозное устройство является неисправным.
[0048] Выполнение условий C1-C4 оценивается на основе информации о дорожной обстановке. Выполнение условия С1 оценивается на основе относительной информации, т.е. информации относительно других транспортных средств (относительной скорости, т.е. скорости относительно других транспортных средств, и относительного расстояния, т.е. расстояния относительно других транспортных средств), входящей, например, в информацию датчиков. Под «другими транспортными средствами» в данном случае понимают транспортные средства, находящиеся в основной полосе или полосе разгона и движущиеся в том же направлении, что и данное транспортное средство М. На ФИГ. 6 изображена схема, иллюстрирующая взаимосвязь между относительной информацией о других транспортных средствах и выполнением условия C1. Если обнаружено, что относительная информация находится в области, обозначенной как «автоматическое перестроение не разрешено» на ФИГ. 6, то есть в области, в которой относительное расстояние невелико или расстояние между транспортными средствами уменьшается, условие C1 считается выполненным. Напротив, если обнаружено, что относительная информация находится в области, обозначенной как «автоматическое перестроение разрешено», то есть в области, в которой относительное расстояние велико или расстояние между транспортными средствами увеличивается, условие C1 считается невыполненным.
[0049] Выполнение условия C2 определяют, например, на основе времени работы переключателя указателя поворота, входящему в информацию датчиков. Выполнение условия C3 определяют, например, по скорости данного транспортного средства M, входящей в информацию датчиков. Выполнение условия C3 оценивается независимо от наличия других транспортных средств, движущихся по основной полосе движения. Если скорость данного транспортного средства M чрезвычайно низка, условие C3 считается выполненным. Условие C4 оценивается, например, на основании наличия или отсутствия сигнала ошибки устройства управления движением, входящего в информацию датчиков.
[0050] На этапе S10 в случае выполнения любого из условий C1–C4 считаются выполненными условия выполнения перестроения водителем. Напротив, если ни одно из условий C1–C4 не выполняется, считаются выполненными условия автоматического перестроения. Таким образом, во время этапа S10 при выполнении всех нижеследующих условий C5–C8 считаются выполненными условия автоматического перестроения.
C5: Другие транспортные средства, препятствующие перестроению данного транспортного средства М, отсутствуют.
C6: Лампа указателя поворота горела в течение заранее заданного времени.
C7: Скорость данного транспортного средства М на ближнем конце зоны перестроения превышает заданную скорость или равна ей.
C8: Устройство управления движущей силой, устройство рулевого управления и тормозное устройство не являются неисправными (являются исправными).
[0051] Если результат определения на этапе S10 является отрицательным (то есть определено, что выполнены все условия C5–C8), начинается автоматическое перестроение (этап S11). В частности, на основе информации о траектории движения величина параметра, управляемого устройством 72 управления движением, определяется таким образом, чтобы данное транспортное средство М двигалось вдоль запланированной траектории движения. Кроме того, моменты начала и окончания работы осветительного устройства 82 (точнее, лампы указателя поворота) определяются на основе информации о траектории движения.
[0052] С другой стороны, если результат определения на этапе S10 является положительным, в местоположении PNO (этап S12) осуществляется проверка выполнения условий выполнения перестроения водителем. То есть выполнение условий выполнения перестроения водителем снова оцениваются в тот момент, когда данное транспортное средство М достигает местоположения PNO.
[0053] Если результат определения на этапе S12 является отрицательным (то есть выполняются все условия C5–C8), начинается автоматическое перестроение (этап S11). При выполнении процедуры на этапе S12 автоматическое перестроение начинается, когда условия автоматического перестроения будут выполнены в местоположении PNO. Иными словами, процедура на этапе S12 выполняется с целью начать автоматическое перестроение, по возможности, в области разрешения автоматического перестроения.
[0054] С другой стороны, когда результат определения на этапе S12 является положительным, начинается медленное и плавное замедление данного транспортного средства M (этап S13). В частности, величина параметра, управляемого устройством 72 управления движением (точнее, степень нажатия тормозного устройства) определяется таким образом, чтобы транспортное средство М замедлялось с заранее заданным целевым отрицательным ускорением (например, -0,1G).
[0055] Если условия выполнения перестроения водителем выполняются в местоположении PNO, система прекращает автоматическое перестроение. Таким образом, в данном случае уведомление о необходимости выполнения перестроения водителем направляется сразу после принятия решения (подробности см. ниже). Таким образом, водитель начинает выполнение перестроения. Тем не менее, когда данное транспортное средство M достигает местоположения PGU сразу после этого, существует вероятность того, что от водителя потребуется начать быстрое замедление для остановки данного транспортного средства M в местоположении PST. Следовательно, плавное замедление начинается на этапе S13 в рамках подготовки к быстрому замедлению. Инициация такого плавного замедления позволяет обеспечить водителю ощущение безопасности благодаря запасу времени на передачу управления транспортным средством.
[0056] После этапа S13 проверяют, достигло ли данное транспортное средство M местоположения PGU до начала выполнения перестроения водителем (этап S14). Определение того, началось или нет выполнение перестроения водителем, происходит, например, на основе показаний датчиков. Достижение данным транспортным средством M местоположения PGU определяют, например, на основе показаний датчиков и информации о перестроении. Если результат определения на этапе S14 является отрицательным, можно определить, что выполнение перестроения водителем началось. Следовательно, в этом случае процедура управления перестроением завершается.
[0057] С другой стороны, если результат определения на этапе S14 является положительным, начинается полное замедление данного транспортного средства M с максимальным отрицательным ускорением (этап S15). В частности, величина параметра, управляемого устройством 72 управления движением (точнее, степень нажатия тормозного устройства) определяется таким образом, чтобы данное транспортное средство М замедлялось с максимальным отрицательным ускорением (например, -0,6G).
[0058] На этапе S10 при выполнении всех условий C5–C8 считаются выполненными условия автоматического перестроения. Тем не менее, характер условия C5 и условий C6-C8 различается. Иными словами, условия C6-C8 зависят только от состояния данного транспортного средства M, в то время как условие C5 зависит от состояний данного транспортного средства M и других транспортных средств. Следовательно, предполагается, что условия C6-C8 были выполнены, в то время как условие C5 не было выполнено. Даже в этом случае условия автоматического перестроения могут внезапно оказаться выполненными, если другие транспортные средства распознают данное транспортное средство М и освободят ему дорогу (например, путем смены полосы движения или замедления другого транспортного средства). Следовательно, на этапе S10, если невыполненным остается только условие C5 (то есть выполняется только условие C1), выдача результата определения может быть временно отсрочена.
[0059] Однако эта отсрочка не должна длиться дольше момента, в который данное транспортное средство М достигает местоположения PNO. То есть когда данное транспортное средство M достигает местоположения PNO, состояние отсрочки отменяется. После отмены состояния отсрочки начинается выполнение этапа S12. Если отсрочка отменена в местоположении PNO, и начинается этап S12 процедуры, то в местоположении PNO можно определить, выполняются ли условия выполнения перестроения водителем (то есть условия C1-C4). Если обнаружено, что условие C5 не выполняется, автоматическое перестроение прекращается, и начинается плавное замедление (этап S13).
[0060] 2.3. Блок 66 назначения местоположения уведомления
Блок 66 выполняет процедуру с целью назначения местоположения для начала уведомления о необходимости выполнения перестроения водителем (в дальнейшем также называемую «процедурой назначения местоположения уведомления») на основе условий выполнения перестроения водителем (или условий автоматического перестроения) и информации о перестроении. Процедура назначения местоположения уведомления будет детально описана со ссылкой на ФИГ. 7.
[0061] На ФИГ. 7 изображена блок-схема процедуры назначения местоположения уведомления согласно первому примеру осуществления изобретения. В процедуре, показанной на ФИГ. 7, сначала временно назначается местоположение PNO (этап S20). Местоположение PNO, имеющее временный статус, представляет собой точку, показанную на ФИГ. 4 (то есть точку, от которой данное транспортное средство М, движущееся со скоростью v, достигает местоположения PGU за α секунд).
[0062] После этапа S20 проверяют, достигло ли данное транспортное средство M местоположения PNO, не начиная автоматическое перестроение (этап S21). Начало автоматического перестроения определяют, например, на основе показаний датчиков. Достижение данным транспортным средством M местоположения PNO определяют, например, на основе показаний датчиков и информации о перестроении. Если результат определения на этапе S21 является отрицательным, можно определить, что автоматическое перестроение началось. Следовательно, в этом случае процедура назначения местоположения уведомления завершается.
[0063] С другой стороны, если результат определения на этапе S21 является положительным, осуществляется проверка выполнения условий автоматического перестроения в местоположении PNO (этап S22). То есть в этом случае оценивается выполнение всех условий C5-C8 в момент времени, в который данное транспортное средство M достигает местоположения PNO.
[0064] Если результат определения на этапе S22 является отрицательным, производится формальное назначение местоположения PNO (этап S23). Формальное местоположение PNO совпадает с местоположением PNO, временно назначенным на этапе S20. Таким образом, если результат определения на этапе S22 является отрицательным, уведомление о необходимости выполнения перестроения водителем направляется сразу после выполнения этапа S23.
[0065] Аналогично этапу S22 процедуры, местоположение PNO назначается формально в том случае, если результат определения на этапе S22 является положительным (этап S24). Тем не менее, формальное местоположение PNO не совпадает с местоположением PNO, назначенным временно на этапе S20. За формальное местоположение PNO принимают, например, точку, от которой данное транспортное средство М, движущееся со скоростью v, достигает местоположения PGU за β секунд (например, 2,0 секунды). Следовательно, если результат определения на этапе S22 является положительным, уведомление о необходимости выполнения перестроения водителем направляется не сразу после выполнения этапа S4 процедуры, а по истечении нескольких секунд.
[0066] В соответствии с описанием этапа S12 на ФИГ. 5, автоматическое перестроение начинается после прохождения местоположения PNO, если условия автоматического перестроения будут окончательно выполнены в местоположении PNO. Этап S24 выполняется для максимальной отсрочки начала автоматического перестроения.
[0067] 4. Технические результаты изобретения
При использовании системы управления транспортным средством в соответствии с первым примером осуществления изобретения, описанным выше, получают следующие технические результаты посредством процедуры управления перестроением и процедуры назначения местоположения уведомления. Они описаны ниже со ссылкой на ФИГ. 8.
[0068] Местоположение PNO1, показанное на ФИГ. 8, представляет собой местоположение PNO, входящее в информацию о местоположении уведомления водителя, и соответствует местоположению PNO, временно назначенному при выполнении процедуры назначения местоположения уведомления. Местоположение PNO2 соответствует местоположению PNO, назначенному формально в том случае, если в местоположении PNO1 выполнены условия автоматического перестроения.
[0069] Согласно процедуре управления перестроением, автоматическое перестроение начинается, если условия автоматического перестроения выполняются в области разрешения автоматического перестроения. Следовательно, автоматическое перестроение начинается даже в том случае, если условия автоматического перестроения выполняются в момент времени, в который данное транспортное средство M достигает местоположения PNO1. В соответствии с процедурой назначения местоположения уведомления, если автоматическое перестроение начинается в такой момент времени, уведомление о ручном перестроении переводят в местоположение PNO2 вместо местоположения PNO1. То есть направление уведомления о необходимости выполнения перестроения водителем временно приостанавливают. Таким образом, автоматическое перестроение можно начинать, по возможности, в пределах области разрешения автоматического перестроения.
[0070] Кроме того, в соответствии с процедурой назначения местоположения уведомления уведомление о необходимости выполнения перестроения водителем направляется в местоположении PNO1, если условия автоматического перестроения не были выполнены в пределах области разрешения автоматического перестроения. Альтернативно, уведомление о необходимости выполнения перестроения водителем направляется в местоположении PNO2, когда данное транспортное средство М достигает местоположения PNO2, даже если при этом выполняются условия автоматического перестроения. Следовательно, если автоматическое перестроение невозможно или данное транспортное средство М достигает местоположения PNO2, сохраняется возможность предложить водителю выполнение безопасного перестроения.
[0071] Кроме того, в соответствии с процедурой управления перестроением, если данное транспортное средство M достигает местоположения PGU без начала перестроения водителем, начинается быстрое замедление данного транспортного средства M. Таким образом, даже если передача управления транспортным средством не была выполнена, несмотря на направление уведомления о перестроении водителем в местоположении PNO1 или PNO2, можно остановить данное транспортное средство M в местоположении PST.
[0072] Кроме того, в соответствии с процедурой управления перестроением плавное замедление начинается в местоположении PNO1, если условия автоматического перестроения не выполняются в области разрешения автоматического перестроения. Если условия автоматического перестроения никогда не выполнялись в области разрешения автоматического перестроения, уведомление о перестроении водителем направляется в местоположении PNO1. Таким образом, начало такого плавного замедления в местоположении PNO1 позволяет обеспечить водителю ощущение безопасности благодаря запасу времени на передачу управления транспортным средством.
[0073] Следует отметить, что в первом примере осуществления изобретения местоположение PNO1, показанное на ФИГ. 8, соответствует «первому местоположению» первого или пятого аспекта. Местоположение PNO2 соответствует «второму местоположению» первого или пятого аспекта. Местоположение PGU соответствует «третьему местоположению» второго или шестого аспекта. Местоположение PST соответствует «целевому местоположению» второго или шестого аспекта.
[0074] Второй пример осуществления изобретения
Ниже будет раскрыт второй пример осуществления настоящего изобретения со ссылкой на ФИГ. 9–12. Ниже будут описаны главным образом моменты, отличающиеся от первого примера осуществления изобретения, и характерные моменты второго пример осуществления изобретения; при этом описание, совпадающее с первым примером осуществления изобретения, при необходимости будет опущено.
[0075] 1. Характеристики процедуры согласно второму примеру осуществления изобретения
Процедура управления перестроением и процедура назначения местоположения уведомления согласно первому примеру осуществления изобретения предполагают, что информация, соответствующая местоположениям PNO, PGU и PST, входит в информацию о перестроении. Тем не менее, поскольку форма полосы разгона меняется, зона перестроения может оказаться короткой. Следовательно, в случае подхода, когда местоположения PNO, PGU и PST назначаются последовательно, существует вероятность того, что местоположение PNO окажется вне зоны перестроения, если длина зоны перестроения будет недостаточной. Другими словами, существует вероятность того, что область разрешения автоматического перестроения не будет задана вовсе.
[0076] Следовательно, во втором примере осуществления изобретения информацию об общей длине зоны перестроения и информацию о длине области уведомления добавляют к информации о перестроении. Информация об общей длине зоны перестроения и информация о длине области уведомления генерируется на основе, например, информации о местоположении и ориентации и картографической информации. Во втором примере осуществления изобретения процедура оценки общей длины выполняется в рамках процедуры управления перестроением и процедуры назначения местоположения уведомления.
[0077] 1.1. Процедура управления перестроением
На ФИГ. 9 изображена блок-схема, демонстрирующая процедуру управления перестроением согласно второму примеру осуществления изобретения. Показанный на ФИГ. 9 алгоритм выполняется многократно в соответствии с заранее заданным периодом управления после того, как данное транспортное средство М входит в полосу разгона и до того, как оно достигнет ближнего конца зоны перестроения.
[0078] В алгоритме, показанном на ФИГ. 9, сначала определяют, меньше ли общая длина зоны перестроения длины области уведомления (этап S30). Если оценка на этапе S30 дает отрицательный результат, можно определить, что область разрешения автоматического перестроения существует. Следовательно, в этом случае процедура управления перестроением завершается.
[0079] С другой стороны, когда результат определения на этапе S30 является положительным, начинается замедление данного транспортного средства M (этап S31). В частности, управляемый параметр устройства 72 управления движением (точнее, степень нажатия тормозного устройства) определяется таким образом, чтобы транспортное средство М замедлялось с заранее заданным целевым отрицательным ускорением (например, равным произведению значения -0,1 G и количества итераций этого алгоритма после въезда в полосу разгона). При определении действий системы управления желательно точно задать целевое отрицательное ускорение таким образом, чтобы скорость данного транспортного средства М на ближнем конце зоны перестроения была равна или выше заданной скорости (см. условие С7).
[0080] Если выполнение этапов S30 и S31 повторяется после того, как данное транспортное средство M въехало в полосу разгона и до достижения ближнего конца зоны перестроения, то общая длина области уведомления постепенно уменьшается по мере замедления данного транспортного средства M. Затем, когда общая длина области уведомления будет уменьшена, будет разрешено назначение местоположения PNO. Если можно назначить местоположение PNO, становится возможным зафиксировать область разрешения автоматического перестроения в зоне перестроения. Как было описано выше, этапы S30 и S31 процедуры направлены на обеспечение возможности автоматического перестроения.
[0081] 1.2. Процедура назначения местоположения уведомления
На ФИГ. 10 изображена блок-схема, демонстрирующая процедуру назначения местоположения уведомления согласно второму примеру осуществления изобретения. Аналогично алгоритму, показанному на ФИГ. 9, алгоритм, показанный на ФИГ. 10, выполняется многократно в соответствии с заранее заданным периодом управления после того, как данное транспортное средство М войдет в полосу разгона и до того, как оно достигнет ближнего конца зоны перестроения.
[0082] В алгоритме, показанном на ФИГ. 10, определяют, превышает ли значение, полученное умножением общей длины области уведомления на коэффициент C, длину зоны перестроения (этап S40). Коэффициент С назначают, например, равным 1,0 – 2,0. По этому коэффициенту C можно определить, является ли общая длина области разрешения автоматического перестроения средней. Средняя длина не считается неподходящей для автоматического перестроения, однако отсутствует возможность начать автоматическое перестроение заблаговременно. Если результат определения на этапе S40 является отрицательным, можно определить, что общая длина области разрешения автоматического перестроения достаточно велика. Следовательно, в этом случае процедура назначения местоположения уведомления завершается.
[0083] С другой стороны, если результат определения на этапе S40 является положительным, местоположение PNO, временно заданное на этапе S20, изменяется (этап S41). За измененное местоположение PNO принимают точку, от которой данное транспортное средство М, движущееся со скоростью v, достигает местоположения PGU за γ секунд (например, 3,0 секунды). Промежуток времени γ назначается равным значению, промежуточному между значениями α и β промежутков времени. При таком выборе промежутка времени γ общая длина области разрешения автоматического перестроения становится большой. Значение γ не обязательно является фиксированным и может изменяться в зависимости от общей длины области разрешения автоматического перестроения. Например, чем короче общая длина области разрешения автоматического перестроения, тем в меньшем диапазоне можно изменять время γ.
[0084] 2. Технические результаты изобретения
При использовании системы управления транспортным средством в соответствии со вторым примером осуществления изобретения, описанным выше, получают следующие эффекты за счет процедуры управления перестроением и процедуры назначения местоположения уведомления. Эти эффекты раскрыты ниже со ссылкой на ФИГ. 11 и 12.
[0085] Местоположение PGU1, показанное на ФИГ. 11, соответствует местоположению PGU, назначенному в определенный момент T1 времени, в который данное транспортное средство M движется по полосе разгона. Местоположение PGU2 соответствует местоположению PGU, назначенному в момент T2 времени после момента T1 времени. Местоположение PNO3 соответствует местоположению PNO, временно назначенному в момент T1 времени. Местоположение PNO4 соответствует местоположению PNO, временно назначенному в момент T2 времени.
[0086] В соответствии с процедурой управления перестроением замедление данного транспортного средства M начинается в том случае, если перед зоной перестроения обнаружено, что общая длина зоны перестроения меньше длины области уведомления. Таким образом, как показано на ФИГ. 11, можно уменьшить длину области уведомления, переместив местоположение PGU1 в PGU2. В результате местоположение PNO 3 смещается в местоположение PNO4, увеличивая тем самым область разрешения автоматического перестроения. Таким образом, можно зафиксировать область разрешения автоматического перестроения в зоне перестроения. Это позволяет обеспечить возможность автоматического перестроения.
[0087] Местоположение PNO1, показанное на ФИГ. 12, соответствует местоположению PNO, временно назначенному в процедуре назначения местоположения уведомления. Местоположение PNO5 соответствует измененному местоположению PNO. Тем не менее, местоположение PNO5 представляет собой местоположение PNO, которое было установлено не формально, а временно. Таким образом, местоположение PNO5 формально назначают в местоположении PNO, если условия автоматического перестроения никогда не выполнялись до достижения данным транспортным средством M местоположения PNO5. Если условия автоматического перестроения в конечном итоге выполняются в момент времени, в который данное транспортное средство M достигает местоположения PNO5, местоположение PNO формально задают в промежутке между местоположениями PNO5 и PGU вместо аналогичного местоположения PNO5.
[0088] В соответствии с процедурой назначения местоположения уведомления, если общая длина области разрешения автоматического перестроения имеет среднюю величину, предварительно назначенное местоположение PNO изменяется с местоположения PNO1 на местоположение PNO5. Таким образом, можно увеличить общую длину области разрешения автоматического перестроения и обеспечить возможность начать автоматическое перестроение.
[0089] В частности, согласно второму примеру осуществления изобретения, даже если перед зоной перестроения обнаружено, что общая длина зоны перестроения меньше длины области уведомления, можно обеспечить область разрешения автоматического перестроения в зоне перестроения путем сочетания замедления данного транспортного средства M на основе процедуры управления перестроением и изменения местоположения PNO на основе процедуры назначения местоположения уведомления. Это позволяет увеличить возможность начать автоматическое перестроение.
[0090] Другие примеры осуществления изобретения
Система управления транспортным средством в соответствии с вышеописанными примерами осуществления изобретения может быть модифицирована следующим образом.
[0091] В процедуре управления перестроением согласно первому примеру осуществления изобретения, если результат определения на этапах S10, S12 и S14 согласно ФИГ. 5 является положительным, замедление с максимальным отрицательным ускорением данного транспортного средства М начинается на этапе S15. Однако, как ясно из определения, данное транспортное средство M отказывается от автоматического перестроения в местоположении PGU, даже если замедление с максимальным отрицательным ускорением начинается только при том условии, что данное транспортное средство M достигло местоположения PGU. То есть, если данное транспортное средство M достигает местоположения PGU, замедление с максимальным отрицательным ускорением может начаться независимо от выполнения процедуры, описанной со ссылкой на ФИГ. 5.
Когда данное транспортное средство достигает местоположения PNO в середине зоны перестроения, осуществляется проверка выполнения условий автоматического перестроения. Если обнаружено, что условие автоматического перестроения в местоположении PNO не выполняется, водителю направляется уведомление о необходимости выполнения перестроения водителем. В противном случае уведомление о необходимости выполнения перестроения водителем не направляется. Если уведомление о необходимости выполнения перестроения водителем не было направлено ранее, оно направляется при достижении данным транспортным средством местоположения PGU между дальним концом зоны перестроения и местоположением PNO. 2 н. и 7 з.п. ф-лы, 12 ил.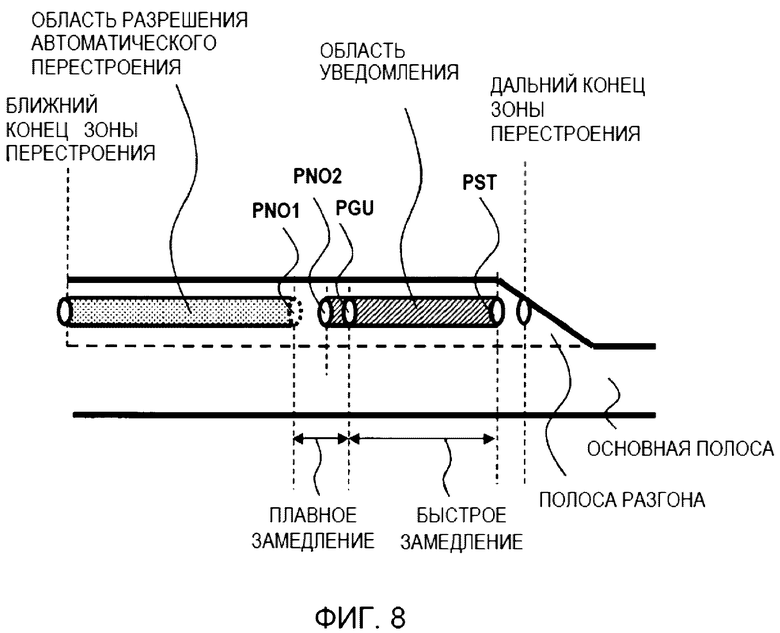
1. Система управления транспортным средством, сконфигурированная для управления автоматическим перестроением данного транспортного средства из полосы разгона в основную полосу,
при этом система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
определять, выполняется ли заранее заданное условие автоматического перестроения, когда транспортное средство достигает первого местоположения в зоне перестроения в пределах полосы разгона;
направлять водителю транспортного средства уведомление о необходимости выполнения перестроения водителем, если обнаружено, что условие автоматического перестроения в первом местоположении не выполняется, и не направлять уведомление водителю, если обнаружено, что условие автоматического перестроения в первом местоположении выполняется; а также
если уведомление не было направлено в первом местоположении, направлять уведомление водителю, когда транспортное средство достигает второго местоположения, расположенного между первым местоположением и дальним концом зоны перестроения.
2. Система управления транспортным средством по п. 1,
при этом система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
когда транспортное средство достигает третьего местоположения в пределах зоны перестроения, управлять данным транспортным средством так, чтобы данное транспортное средство остановилось в целевом местоположении вблизи дальнего конца; а также
назначать первое и второе местоположения между третьим местоположением и ближним концом зоны перестроения.
3. Система управления транспортным средством по п. 2,
при этом система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
если обнаружено, что условие автоматического перестроения в первом местоположении не выполняется, управлять транспортным средством так, чтобы данное транспортное средство замедлялось на участке перемещения от первого местоположения до второго местоположения; а также
назначать абсолютное значение целевого отрицательного ускорения данного транспортного средства между первым и вторым местоположениями равным значению, которое меньше абсолютного значения отрицательного ускорения между третьим и целевым местоположениями.
4. Система управления транспортным средством по п. 2,
при этом система управления транспортным средством дополнительно сконфигурирована для того, чтобы в том случае, если общая длина зоны перестроения превышает расстояние от третьего местоположения до целевого местоположения, изменять первое местоположение на местоположение, находящееся ближе к третьему местоположению, по мере уменьшения расстояния от ближнего конца до первого местоположения.
5. Система управления транспортным средством, сконфигурированная для управления автоматическим перестроением данного транспортного средства из полосы разгона в основную полосу,
при этом система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
генерировать, на основе информации о дорожной обстановке вокруг данного транспортного средства, информацию о перестроении для автоматического перестроения;
в случае выполнения заранее заданного условия автоматического перестроения управлять данным транспортным средством на основе информации о перестроении так, чтобы данное транспортное средство выполнило автоматическое перестроение;
на основе условия автоматического перестроения и информации о перестроении назначать начальное местоположение, в котором водителю данного транспортного средства направляется уведомление о необходимости выполнения перестроения водителем;
на основе информации о перестроении предварительно назначать первое местоположение зоны перестроения в полосе разгона в качестве начального местоположения;
определять, выполняется ли условие автоматического перестроения в первом местоположении, если перестроение данного транспортного средства не началось до того, как данное транспортное средство достигло первого местоположения;
формально назначать первое местоположение в качестве начального местоположения, если обнаружено, что условие автоматического перестроения в первом местоположении не выполняется; а также
формально назначать второе местоположение, находящееся между первым местоположением и дальним концом зоны перестроения, в качестве начального местоположения, если обнаружено, что условие автоматического перестроения в первом местоположении выполняется.
6. Система управления транспортным средством по п. 5,
при этом система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
когда транспортное средство достигает третьего местоположения в пределах зоны перестроения, управлять данным транспортным средством так, чтобы данное транспортное средство остановилось в целевом местоположении вблизи дальнего конца; а также
назначать первое и второе местоположения между третьим местоположением и ближним концом зоны перестроения.
7. Система управления транспортным средством по п. 6,
при этом система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
если обнаружено, что условие автоматического перестроения в первом местоположении не выполняется, управлять транспортным средством так, чтобы данное транспортное средство замедлялось на участке перемещения от первого местоположения до второго местоположения; а также
назначать абсолютное значение целевого отрицательного ускорения данного транспортного средства между первым и вторым местоположениями равным значению, которое меньше абсолютного значения отрицательного ускорения между третьим и целевым местоположениями.
8. Система управления транспортным средством по п. 6,
при этом система управления транспортным средством дополнительно сконфигурирована для того, чтобы в том случае, если общая длина зоны перестроения превышает расстояние от третьего местоположения до целевого местоположения, изменять первое местоположение на местоположение, находящееся ближе к третьему местоположению, по мере уменьшения расстояния от ближнего конца до первого местоположения.
9. Система управления транспортным средством по п. 6,
при этом система управления транспортным средством дополнительно сконфигурирована для того, чтобы:
постоянно назначать третье местоположение с заранее заданным периодом управления до тех пор, пока данное транспортное средство не войдет в полосу разгона и не достигнет ближнего конца, на основе скорости данного транспортного средства и максимального отрицательного ускорения данного транспортного средства в заранее заданном периоде управления;
постоянно назначать первое местоположение после назначения третьего местоположения на основе назначенного третьего местоположения; и
управлять данным транспортным средством так, чтобы данное транспортное средство замедлялось перед вхождением в зону перестроения, если общая длина зоны перестроения меньше расстояния от третьего местоположения до целевого местоположения.
| JP 2016071514 A, 09.05.2016 | |||
| JP 2017194784 A, 26.10.2017 | |||
| WO 2017170892 A1, 05.10.2017 | |||
| JP 2017132408 A, 03.08.2017. |

