Изобретение относится к области определения местоположения или обнаружения объектов с использованием отражения ультразвуковых волн, а именно к измерению дальности косвенным путем и может быть использовано в горнодобывающей промышленности для определения глубины скважин, в судоходстве для контроля глубины морского дна, в рыболовстве для обнаружения косяков рыб.
Известен способ компенсации погрешностей ультразвукового локатора [RU 2544310 С1, МПК G01N 29/36, опубл. 20.03.2015], выбранный в качестве прототипа, включающий излучение ультразвукового сигнала, прием ответного сигнала, измерение временного интервала между излученным и принятым сигналами и определение расстояния до отражающей поверхности путем умножения скорости распространения ультразвука в контролируемой среде на измеренный временной интервал. Излучение, прием ультразвуковых сигналов и измерение временных интервалов между излученным и принятым ультразвуковым сигналами производят на двух частотах с разными периодами, затем производят сравнение этих временных интервалов и их коррекцию в соответствии с выражением:

где Т1 - период колебаний первой ультразвуковой волны,
Т2 - период колебаний второй ультразвуковой волны,
i - номер коррекции,
Δt1 - первый измеренный временной интервал,
Δt2 - второй измеренный временной интервал,
полученное значение временного интервала (Δt1-i⋅T1) используют при расчете расстояния до отражающей поверхности.
Этот способ имеет низкую точность измерения.
Техническим результатом изобретения является создание способа, обеспечивающего снижение погрешности измерений при волноводном распространении ультразвуковых колебаний.
Предложенный способ компенсации погрешности измерения ультразвукового локатора, так же как в прототипе, включает излучение и прием ультразвуковых волн на двух частотах с разными периодами, измерение временных интервалов между излученными и принятыми ультразвуковыми волнами, определение расстояния до отражателя путем умножения скорости распространения ультразвука в контролируемой среде на время его распространения.
Согласно изобретению при усилении принятых ультразвуковых волн амплитуду сигналов задают одинаковой для обеих частот, а после измерения временных интервалов между излученными и принятыми ультразвуковыми волнами на двух частотах, определяют время распространения принятых ультразвуковых волн в соответствии с выражением:

где Т1 - период колебаний первой ультразвуковой волны;
Т2 - период колебаний второй ультразвуковой волны;
Δt1 - первый временной интервал;
Δt2 - второй временной интервал,
полученное значение используют при определении расстояния до отражателя.
Определение таким образом времени распространения принятых ультразвуковых волн позволяет более точно определить временную координату ответного сигнала, и соответственно уменьшить погрешность измерения ультразвукового локатора.
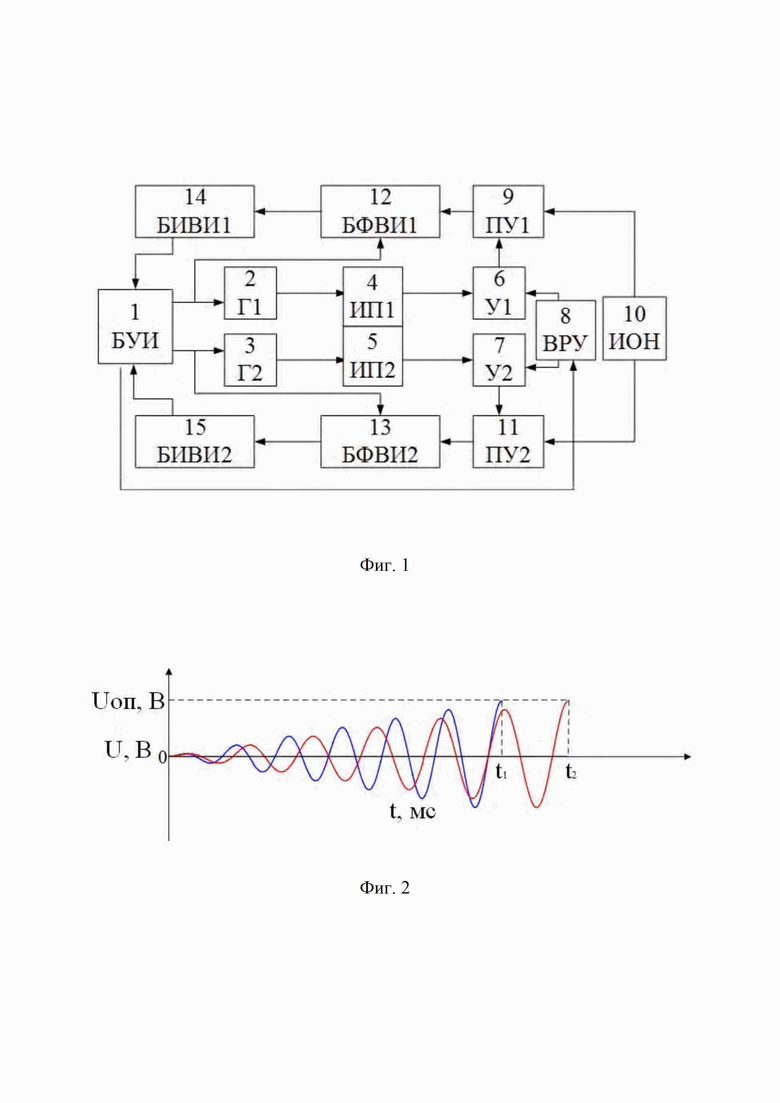
На фиг. 1 показана функциональная схема устройства для осуществления предлагаемого способа.
На фиг. 2 представлены диаграммы двух эхо-сигналов на разных частотах с указанием времени срабатывания компараторов.
Устройство, реализующее предлагаемый способ (фиг. 1) содержит блок управления и индикации 1 (БУИ), который соединен с первым 2 (Г1) и вторым 3 (Г2) генераторами. Выход первого генератора 2 (Г1) соединен с первым датчиком излучения и приема 4 (ИП1). Выход второго генератора 3 (Г2) соединен с вторым датчиком излучения и приема 5 (ИП2). Первый датчик 4 (ИП1) соединен с первым усилителем 6 (У1). Второй датчик 5 (ИП2) соединен и со вторым усилителем 7 (У2). Блок временной регулировки усиления 8 (ВРУ) подключен к первому 6 (У1) и второму 7 (У2) усилителям и к блоку управления 1 (БУИ). Первый усилитель 6 (У1) связан с входом первого порогового устройства 9 (ПУ1), к другому входу которого подключен источник опорного напряжения 10 (ИОН). Второй усилитель 7 (У2) связан с входом второго порогового устройства 11 (ПУ2), к другому входу которого подключен источник опорного напряжения 10 (ИОН). Выход первого порогового устройства 9 (ПУ1) подключен к входу первого блока формирования временного интервала 12 (БФВИ1), к другому входу которого подключен блок управления и индикации 1 (БУИ). Выход второго порогового устройства 11 (ПУ2) подключен к входу второго блока формирования временного интервала 13 (БФВИ2), к другому входу которого подключен блок управления и индикации 1 (БУИ). Выход первого блока формирования временного интервала 12 (БФВИ1) подключен к входу первого блока измерения временного интервала 14 (БИВИ1), выход которого подключен к блоку управления и индикации 1 (БУИ). Выход второго блока формирования временного интервала 13 (БФВИ2) подключен к входу второго блока измерения временного интервала 15 (БИВИ2), выход которого подключен к блоку управления и индикации 1 (БУИ).
Блок управления и индикации 1 (БУИ) может быть выполнен на микроконтроллере ATMEGA64 фирмы ATMEL и семисегментных индикаторах типа DA56-11SRWA, фирмы KINGBIHT. Генераторы 2 (Г1) и 3 (Г2) могут быть выполнены по схеме с разрядом накопительной емкости на тиристорах типа КУ104Г. Датчики излучения и приема 4 (ИП1) и 5 (ИП2) могут быть стандартными, например, фирмы Мурата МА40 и МА25. Усилители 6 (У1) и 7 (У2) могут быть выполнены на операционных усилителях, например, К544УД2. Блок временной регулировки усиления 8 (ВРУ) может быть выполнен на цифро-аналоговом преобразователе, входящем в состав микроконтроллера, например, ATMEGA64 фирмы ATMEL. В качестве пороговых устройств 9 (ПУ1) и 11 (ПУ2) можно использовать компараторы К521СА3. Блоки формирования временного интервала 12 (БФВИ1) и 13 (БФВИ2) могут быть выполнены на стандартных микросхемах К1554ТМ2. Блоки измерения временного интервала 14 (БИВИ1), 15 (БИВИ2) могут быть выполнены на стандартных микросхемах, например, К1554ИЕ7. Источник опорного напряжения 10 (ИОН) выбран типовым REF 192 фирмы ANALOG DEVICES в стандартном включении.
При измерении расстояния в трубе были установлены отражатель в виде металлической пластины и на расстоянии 500 мм от него датчики излучения и приема 4 (ИП1) и 5 (ИП2). Частота излучения первого датчика 4 (ИП1) составляла 25 кГц, период T1=40 мкс, а длина волны λ1=13,2 мм. Частота излучения второго датчика 5 (ИП2) составляла 40 кГц, период Т2=25 мкс, длина волны λ2=8,25 мм. Скорость распространения ультразвука в воздухе С=330 м/с.
Блок управления и индикации 1 (БУИ) вырабатывал импульс запуска для первого генератора 2 (Г1), этим же импульсом первый блок формирования временного интервала 14 (БФВИ1) установился в состояние логической 1. Первый генератор 2 (Г1) возбуждал первый датчик излучения и приема 4 (ИП1), который излучал ультразвуковые колебания с периодом T1=40 мкс. Излученные ультразвуковые колебания распространялись по воздушной среде, принимались первым датчиком излучения и приема 4 (ИП1), усиливались первым усилителем 6 (У1), коэффициент усиления которого плавно увеличивался с помощью блока временной регулировки усиления 8 (ВРУ). С выхода первого усилителя 6 (У1) сигнал поступал на вход первого порогового устройства 9 (ПУ1). На второй вход первого порогового устройства 9 (ПУ1) подавалось напряжение U от источника опорного напряжения 10 (ИОН). Как только напряжение на выходе первого усилителя 6 (У1) превысило напряжение U, выход первого порогового устройства 9 (ПУ1) переключился в состояние логической 1, которая установила первый блок формирования временного интервала 12 (БФВИ1) в состояние логического нуля (точка t1 на фиг. 2). Таким образом, на выходе первого блока формирования временного интервала 12 (БФВИ1) сформировался импульс, длительность которого равна времени:

где t0 - начальный момент времени излучения ультразвуковых волн,
t1 - время срабатывания первого порогового устройства 9 (ПУ1).
Этот импульс поступил в первый блок измерения временного интервала 14 (БИВИ1). Длительность импульса, измеренного первым блоком измерения временного интервала 14 (БИВИ1) составила:

Данные о длительности этого импульса поступили в блок управления и индикации 1 (БУИ).
Затем блок управления 1 (БУ) вырабатывал импульс запуска для второго генератора 3 (Г2), этим же импульсом второй блок формирования временного интервала 13 (БФВИ2) установился в состояние логической единицы. Второй генератор 3 (Г2) возбуждал второй датчик излучения и приема 5 (ИП2), который излучил ультразвуковые колебания с периодом Т2=25 мкс. Излученные ультразвуковые колебания распространялись по той же воздушной среде и принимались вторым датчиком излучения и приема 5 (ИП2), усиливались вторым усилителем 7 (У2), коэффициент усиления которого плавно увеличивался с помощью блока временной регулировки усиления 8 (ВРУ), который обеспечил одинаковую амплитуду сигналов на выходе первого усилителя 6 (У1) и второго усилителя 7 (У2) для обеих частот. С выхода второго усилителя 7 (У2) сигнал поступил на вход второго порогового устройства 11 (ПУ2). На второй вход второго порогового устройства 11 (ПУ2) подавалось напряжение U от источника опорного напряжения 10 (ИОН). Как только напряжение на выходе второго усилителя 7 (У2) превысило напряжение U, выход второго порогового устройства 11 (ПУ2) переключился в состояние логической 1, которая установила второй блок формирования временного интервала 13 (БФВИ2) в состояние логического нуля (точка t2 на фиг. 2). Таким образом, на выходе второго блока формирования временного интервала 13 (БФВИ2) сформировался импульс, длительность которого равна времени:

где t0 - начальный момент времени излучения ультразвуковых волн,
t2 - время срабатывания второго порогового устройства 11(ПУ2).
Этот импульс поступил во второй блок измерения временного интервала 15 (БИВИ2).
Длительность этого импульса составила:

Данные об этой длительности поступили в блок управления и индикации 1 (БУИ), который рассчитал время распространения принятых ультразвуковых волн:

где Δt1 - длительность импульса, измеренного первым блоком измерения временного интервала 14 (БИВИ1),
Δt2 - длительность импульса, измеренного вторым блоком измерения временного интервала 15 (БИВИ1),
T1 - период ультразвуковых колебаний первого датчика излучения и приема 4 (ИП1),
Т2 - период ультразвуковых колебаний второго датчика излучения и приема 5 (ИП2).
Используя это значение времени распространения принятых ультразвуковых волнблок управления и индикации 1 (БУИ) определил расстояние до отражателя:

Ошибка измерения составила:

Таким образом, экспериментально установлено, что погрешность измерения составила λ2/16.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2019 |
|
RU2703836C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2015 |
|
RU2596907C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2015 |
|
RU2599602C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2013 |
|
RU2544310C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО СКВАЖИННОГО ГЛУБИНОМЕРА | 2013 |
|
RU2544311C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2389982C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2396521C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2011 |
|
RU2471158C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2021 |
|
RU2754716C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ | 2023 |
|
RU2817123C1 |
Использование: для компенсации погрешности измерения ультразвукового локатора. Сущность изобретения заключается в том, что осуществляют излучение и прием ультразвуковых волн на двух частотах с разными периодами, измерение временных интервалов между излученными и принятыми ультразвуковыми волнами, определение расстояния до отражателя путем умножения скорости распространения ультразвука в контролируемой среде на время его распространения, при этом при усилении принятых ультразвуковых волн амплитуду сигналов задают одинаковой для обеих частот, а после измерения временных интервалов между излученными и принятыми ультразвуковыми волнами на двух частотах, определяют время распространения принятых ультразвуковых волн в соответствии с заданным выражением, полученное значение используют при определении расстояния до отражателя. Технический результат: обеспечение возможности снижения погрешности измерений при волноводном распространении ультразвуковых колебаний. 2 ил.
Способ компенсации погрешности измерения ультразвукового локатора, включающий излучение и прием ультразвуковых волн на двух частотах с разными периодами, измерение временных интервалов между излученными и принятыми ультразвуковыми волнами, определение расстояния до отражателя путем умножения скорости распространения ультразвука в контролируемой среде на время его распространения, отличающийся тем, что при усилении принятых ультразвуковых волн амплитуду сигналов задают одинаковой для обеих частот, а после измерения временных интервалов между излученными и принятыми ультразвуковыми волнами на двух частотах, определяют время распространения принятых ультразвуковых волн в соответствии с выражением:
 ,
,
где  – период колебаний первой ультразвуковой волны;
– период колебаний первой ультразвуковой волны;
 – период колебаний второй ультразвуковой волны;
– период колебаний второй ультразвуковой волны;
 – первый временной интервал;
– первый временной интервал;
 – второй временной интервал,
– второй временной интервал,
полученное значение используют при определении расстояния до отражателя.
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2013 |
|
RU2544310C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2389982C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2007 |
|
RU2358243C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2389981C1 |
| US 20120310093 A1, 06.12.2012. | |||

