Изобретение относится к ультразвуковым локационным устройствам, применяемым для измерения глубины скважин в горнодобывающей промышленности, судоходстве и других отраслях народного хозяйства.
Известно устройство компенсации погрешности измерения ультразвукового уровнемера (RU 75034 U1, МПК G01F23/28 (2006.01), опубл. 20.07.2008), содержащее генератор ультразвуковых импульсов, соединенный с излучателем, источник опорного напряжения, подключенный к пороговому устройству, и последовательно соединенные приемник, усилитель, пороговое устройство, блок управления и индикации. Последовательно соединены второй источник опорного напряжения, второе пороговое устройство и второй блок формирования временного интервала, подключенный к первому пороговому устройству и блоку управления и индикации. Второе пороговое устройство подключено к усилителю.
Недостатком известного устройства является высокая погрешность измерения, обусловленная отклонением формы огибающей отраженных ультразвуковых импульсов от линейно-нарастающей за счет распространения в волноводе.
Известно устройство компенсации погрешности ультразвукового уровнемера (RU 2396521 С1, МПК G01F23/28 (2006.01), опубл. 10.08.2010), выбранное в качестве прототипа, содержащее генератор ультразвуковых импульсов, подключенный к излучателю, и последовательно соединенные приемник, усилитель, пороговое устройство, блок формирования временного интервала, блок управления и индикации, выход которого связан с генератором и входом блока формирования временного интервала, источник опорного напряжения, подключенный к входу порогового устройства. Входы блока измерения временных интервалов подключены к пороговому устройству и к кварцевому генератору, а выход - к блоку управления и индикации. Источник опорного напряжения подключен к входу блока управления и индикации.
Недостатком этого устройства является низкая точность и стабильность измерения, обусловленная изменением формы и амплитуды принятого ультразвукового сигнала при волноводном распространении, вследствие чего амплитуда принятого сигнала при различных дистанциях может изменяться немонотонно [Солдатов А.И., Сорокин П.В., Макаров В.С. Определение временного положения акустического импульса методом аппроксимации огибающей сигнала //Известия Южного федерального университета. Технические науки, 2009, - №10, - c.178-184], например, длительность третьего временного интервала может оказаться меньше длительности первого временного интервала или длительности всех измеренных временных интервалов могут оказаться одинаковыми. Это приводит к невозможности определения временной координаты начала принятого ультразвукового сигнала.
Задачей изобретения является создание устройства, обеспечивающего снижение погрешности и повышение стабильности измерений при волноводном распространении ультразвуковых колебаний.
Поставленная задача решена за счет того, что устройство компенсации погрешности измерения ультразвукового локатора, так же как прототип, содержит генератор ультразвуковых импульсов, подключенный к излучателю, и последовательно соединенные приемник, усилитель, пороговое устройство, блок формирования временного интервала, блок измерения временного интервала и блок управления и индикации, выход которого связан с генератором и входом блока формирования временного интервала, источник опорного напряжения, подключенный к входу порогового устройства, кварцевый генератор, подключенный к блоку измерения временных интервалов.
Согласно изобретению второй генератор ультразвуковых импульсов подключен к второму излучателю, последовательно соединены второй приемник, второй усилитель, второе пороговое устройство, второй блок формирования временного интервала и второй блок измерения временного интервала, причем источник опорного напряжения подключен к второму входу второго порогового устройства, вход второго блока измерения временного интервала связан с кварцевым генератором, а выход второго блока измерения временного интервала подключен к блоку управления и индикации, выходы которого подключены ко второму генератору и второму блоку формирования временного интервала.
Использование второго генератора, подключенного ко второму излучателю, и последовательно соединенных второго приемника, второго усилителя, работающих на другой частоте, второго порогового устройства, второго блока формирования временного интервала и второго блока измерения временного интервала, когда источник опорного напряжения подключен к второму входу второго порогового устройства, вход второго блока измерения временного интервала связан с кварцевым генератором, а выход второго блока измерения временного интервала подключен к блоку управления и индикации, позволяет компенсировать погрешность измерения ультразвукового локатора и повышает стабильность измерения за счет нового алгоритма обработки, заключающегося в определении временной координаты начала ответного сигнала путем корректировки измеренных временных интервалов в первом и втором блоках измерения временного интервала.
На фиг. 1 представлена схема предложенного устройства.
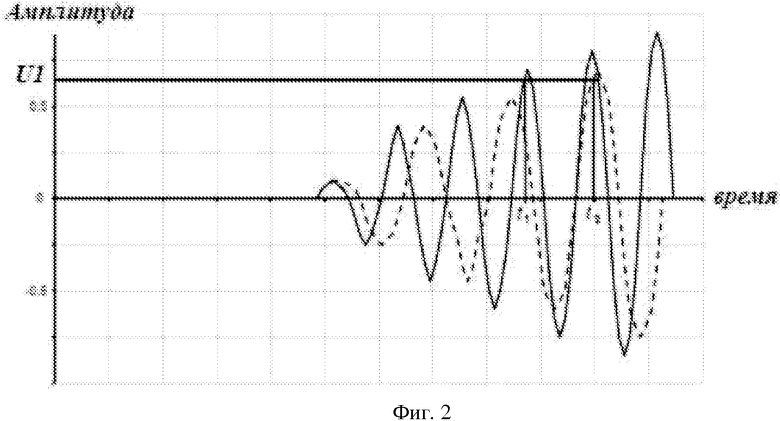
На фиг. 2 представлена диаграмма, иллюстрирующая работу устройства.
Устройство компенсации погрешности измерения ультразвукового скважинного глубиномера (фиг. 1) содержит блок управления и индикации 1 (БУиИ), соединенный с первым 2 (Г1) и вторым 3 (Г2) генераторами. Выход первого генератора 2 (Г1) соединен с первым излучателем 4 (И1), выход второго генератора 3 (Г2) соединен со вторым излучателем 5 (И2). Первый приемник 6 (П1) соединен с первым усилителем 7 (У1), выход которого связан с входом первого порогового устройства 8 (ПУ1). К другому входу первого порогового устройства 8 (ПУ1) подключен источник опорного напряжения 9 (ИОН). Выход первого порогового устройства 8 (ПУ1) подключен к входу первого блока формирования временного интервала 10 (БФВИ1), к другому входу которого подключен блок управления и индикации 1 (БУиИ). Выход первого блока формирования временного интервала 10 (БФВИ1) подключен к первому входу первого блока измерения временных интервалов 11 (БИВИ1), второй вход которого связан с кварцевым генератором 12 (КГ). Выход первого блока измерения временных интервалов 11 (БИВИ1) связан с блоком управления и индикации 1 (БУиИ). Второй приемник 13 (П2) соединен со вторым усилителем 14 (У2), выход которого связан с входом второго порогового устройства 15 (ПУ2). К другому входу второго порогового устройства 15 (ПУ2) подключен источник опорного напряжения 9 (ИОН). Выход второго порогового устройства 15 (ПУ2) подключен к входу второго блока формирования временного интервала 16 (БФВИ2), к другому входу которого подключен блок управления и индикации 1 (БУиИ). Выход второго блока формирования временного интервала 16 (БФВИ2) подключен к второму блоку измерения временных интервалов 17 (БИВИ2), к второму входу которого подключен кварцевый генератор 12 (КГ). Выход второго блока измерения временных интервалов 17 (БИВИ2) связан с блоком управления и индикации 1 БУиИ).
Блок управления и индикации 1 (БУиИ) может быть выполнен на микроконтроллере ATMEGA16 и семисегментных индикаторах типа DA56-11SRWA. Блоки формирования временного интервала 10 (БФВИ1) и 16 (БФВИ2) выполнены на стандартной микросхеме К1554ТМ2. Генераторы 2 (Г1) и 3 (Г2) могут быть выполнены по схеме с разрядом накопительной емкости на тиристорах типа КУ104Г. Излучатели 4 (И1) и 5 (И2), приемники 6 (П1) и 13 (П2) могут быть изготовлены из любой пьезокерамики, например ЦТС-19. Усилители 7 (У1) и 14 (У2) могут быть выполнены на операционном усилителе, например К544УД2. В качестве порогового устройства 8 (ПУ1) и 15 (ПУ2) может использоваться компаратор К521СА3. Блоки измерения временного интервала 11 (БИВИ1) и 17 (БИВИ2) могут быть выполнены на стандартных микросхемах, например К1554ИЕ7. Источник опорного напряжения 9 (ИОН) выбран типовым REF 192 фирмы ANALOG DEVICES в стандартном включении. Кварцевый генератор 12 (КГ) может быть выполнен на микросхеме KXO-V97 50.0 фирмы GEYER в стандартном включении.
Устройство работает следующим образом.
Блок управления и индикации 1 (БУиИ) вырабатывает импульс запуска для первого генератора 2 (Г1), этим же импульсом первый блок формирования временного интервала 10 (БФВИ1) устанавливается в состояние логической единицы. Первый генератор 2 (Г1) возбуждает первый излучатель 4 (И1). Излученный ультразвуковой импульс распространяется по контролируемой среде и принимается первым приемником 6 (П1), усиливается первым усилителем 7 (У1) и поступает на вход первого порогового устройства 8 (ПУ1). На второй вход первого порогового устройства 8 (ПУ1) подается напряжение U1 от источника опорного напряжения 9 (ИОН). Как только напряжение на выходе первого усилителя 7 (У1) превысит напряжение U1, выход первого порогового устройства 8 (ПУ1) переключится в состояние логической единицы, которая сбрасывает первый блок формирования временного интервала 10 (БФВИ1) в состояние логического нуля (точка t1 фиг. 2). Таким образом, на выходе первого блока формирования временного интервала 10 (БФВИ1) получится импульс, длительность которого равна времени 
Затем блок управления и индикации 1 (БУиИ) вырабатывает импульс запуска для второго генератора 3 (Г2), этим же импульсом второй блок формирования временного интервала 15 (БФВИ2) устанавливается в состояние логической единицы. Второй генератор 3 (Г2) возбуждает второй излучатель 5 (И2). Излученный ультразвуковой импульс распространяется по той же контролируемой среде и принимается вторым приемником 13 (П2), усиливается вторым усилителем 14 (У2) и поступает на вход второго порогового устройства 15 (ПУ2). На второй вход второго порогового устройства 15 (ПУ2) подается напряжение U1 с источника опорного напряжения 9 (ИОН). Как только напряжение на выходе второго усилителя 14 (У2) превысит напряжение U1, выход второго порогового устройства 15 (ПУ2) переключится в состояние логической единицы, которая сбрасывает второй блок формирования временного интервала 16 (БФВИ2) в состояние логического нуля (точка t2 фиг. 1). Таким образом, на выходе второго блока формирования временного интервала 16 (БФВИ2) получится импульс, длительность которого равна времени 
где 

i- номер коррекции,


После того как разность между скорректированными первым и вторым временными интервалами будет меньше чем четверть периода ультразвуковых колебаний:
процесс коррекции прекращается и полученный первый временной интервал 
В качестве примера рассмотрим определение расстояния в трубе длиной 250 см, заполненной водой, в которой были установлены излучатели 4 (И1) и 5 (И2) и приемники 6 (П1) и 13 (П2). Частота ультразвуковых колебаний первого излучателя 4 (И1) и первого приемника 6 (П1) составляла 600 кГц, соответственно длина волны 



Δt1=328,7 мкс, Δt2=326,8 мкс.
Временные интервалы между излученными и отраженными ультразвуковыми импульсами, измеренные блоками измерения временных интервалов 11 (БИВИ1) и 17 (БИВИ2), имели длительности
Δt1=328,7 мкс,
Δt2=326,8 мкс.
При коррекции по формулам 1 и 2 получили следующий набор значений:
1) 

После первой коррекции (i=1) получили значение, превышающее четверть периода ультразвуковых колебаний. Провели вторую коррекцию:
2) 

После второй коррекции (i=2) получили значение, превышающее четверть периода ультразвуковых колебаний. Провели третью коррекцию:
3) 

После третьей коррекции (i=3) получили разность времен первого и второго интервала меньше четверти периода ультразвуковых колебаний.
В результате расчета, блок управления и индикации 1 (БУиИ) получил следующее значение временного интервала:

Используя это значение временного интервала, блок управления и индикации 1 (БУиИ) определил расстояние до отражающей поверхности и произвел индикацию этого расстояния.

где С - скорость распространения ультразвука в воде.
Ошибка измерения уровня ∆h составила:
∆h=250-250,28=0,28 мм.
Таким образом, экспериментально установлено, что погрешность измерения уровня составила λ/6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2013 |
|
RU2544310C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2015 |
|
RU2596907C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2019 |
|
RU2703836C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2015 |
|
RU2599602C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2019 |
|
RU2703834C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2396521C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2021 |
|
RU2754716C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2389982C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2008 |
|
RU2380659C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2011 |
|
RU2470267C1 |
Использование: для компенсации погрешности измерения ультразвукового скважинного глубиномера. Сущность изобретения заключается в том, что устройство компенсации погрешности измерения ультразвукового локатора содержит генератор ультразвуковых импульсов, подключенный к излучателю, и последовательно соединенные приемник, усилитель, пороговое устройство, блок формирования временного интервала, блок измерения временного интервала и блок управления и индикации, выход которого связан с генератором и входом блока формирования временного интервала, источник опорного напряжения, подключенный к входу порогового устройства, кварцевый генератор, подключенный к блоку измерения временных интервалов, при этом второй генератор ультразвуковых импульсов подключен к второму излучателю, последовательно соединены второй приемник, второй усилитель, второе пороговое устройство, второй блок формирования временного интервала и второй блок измерения временного интервала, причем источник опорного напряжения подключен к второму входу второго порогового устройства, вход второго блока измерения временного интервала связан с кварцевым генератором, а выход второго блока измерения временного интервала подключен к блоку управления и индикации, выходы которого подключены ко второму генератору и второму блоку формирования временного интервала. Технический результат: снижение погрешности и повышение стабильности измерений при волноводном распространении ультразвуковых колебаний. 2 ил.
Устройство компенсации погрешности измерения ультразвукового локатора, содержащее генератор ультразвуковых импульсов, подключенный к излучателю, и последовательно соединенные приемник, усилитель, пороговое устройство, блок формирования временного интервала, блок измерения временного интервала и блок управления и индикации, выход которого связан с генератором и входом блока формирования временного интервала, источник опорного напряжения, подключенный к входу порогового устройства, кварцевый генератор, подключенный к блоку измерения временных интервалов, отличающееся тем, что второй генератор ультразвуковых импульсов подключен к второму излучателю, последовательно соединены второй приемник, второй усилитель, второе пороговое устройство, второй блок формирования временного интервала и второй блок измерения временного интервала, причем источник опорного напряжения подключен к второму входу второго порогового устройства, вход второго блока измерения временного интервала связан с кварцевым генератором, а выход второго блока измерения временного интервала подключен к блоку управления и индикации, выходы которого подключены ко второму генератору и второму блоку формирования временного интервала.
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2389982C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2007 |
|
RU2358243C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2389981C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ АКУСТИЧЕСКИХ ЛОКАЦИОННЫХ УРОВНЕМЕРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2129703C1 |
| US 4467653A, 28.08.1984 | |||
| US 20120310093A1, 06.12.2012 | |||

