Изобретение относится к области радиолокации и может быть использовано в многопозиционных радиолокационных системах радиоконтроля при решении задачи скрытного обнаружения, определения дальности и направления на сканирующий источник радиоизлучения (ИРИ). Достигаемый технический результат изобретения - возможность определения дальности до сканирующего ИРИ и азимутального направления на сканирующий ИРИ, минимально возможным количеством измерений. Указанный результат достигается за счет измерением периода сканирования Тс ИРИ, временных интервалов последовательного облучения приемных пунктов (ПП) системы τ12, τ23, τ31, при этом τ12 - временной интервал между последовательным облучением 1 ПП и 2 ПП, τ23 - временной интервал между последовательным облучением 2 ПП и 3 ПП, τ31 - временной интервал между последовательным облучением 3 ПП и 1 ПП.
Известно изобретение позволяющее определять местоположение работающей радиолокационной станции (РЛС), имеющей сканирующую направленную антенну [1]. Указанный результат достигается за счет определения местоположения сканирующей РЛС пассивным многолучевым, по меньшей мере трехлучевым, пеленгатором, при котором измеряют период вращения антенны РЛС, определяют угол поворота антенны РЛС относительно направления на пеленгатор, при этом в каждом цикле зондирования при данном угле поворота антенны РЛС измеряют временные задержки сигналов, рассеянных отражающей поверхностью не менее, чем в двух лучах пеленгатора. Затем на основании проведенных измерений рассчитывается расстояние от пеленгатора до цели, а также угол между направлением на РЛС и направлением первого луча пеленгатора вычисляют по соответствующим формулам.
Способ базируется на измерении направления на сканирующий ИРИ, что в свою очередь вносит дополнительные ошибки и является, своего рода, недостатком.
Известно изобретение [2] для определения местоположения работающей РЛС, имеющей сканирующую направленную антенну.
Способ определения местоположения работающей РЛС реализуется следующим образом. Предполагается, что приемные устройства пассивного многолучевого (двухлучевого) пеленгатора в месте наблюдения имеют достаточную чувствительность для приема прямых сигналов передатчика по боковому излучению его антенны. Ставя в соответствие измеренным разностям углов и моментам приема сигналов пеленгатором координаты реально существующих на местности отражающих объектов, вычисляется местоположение передатчика.
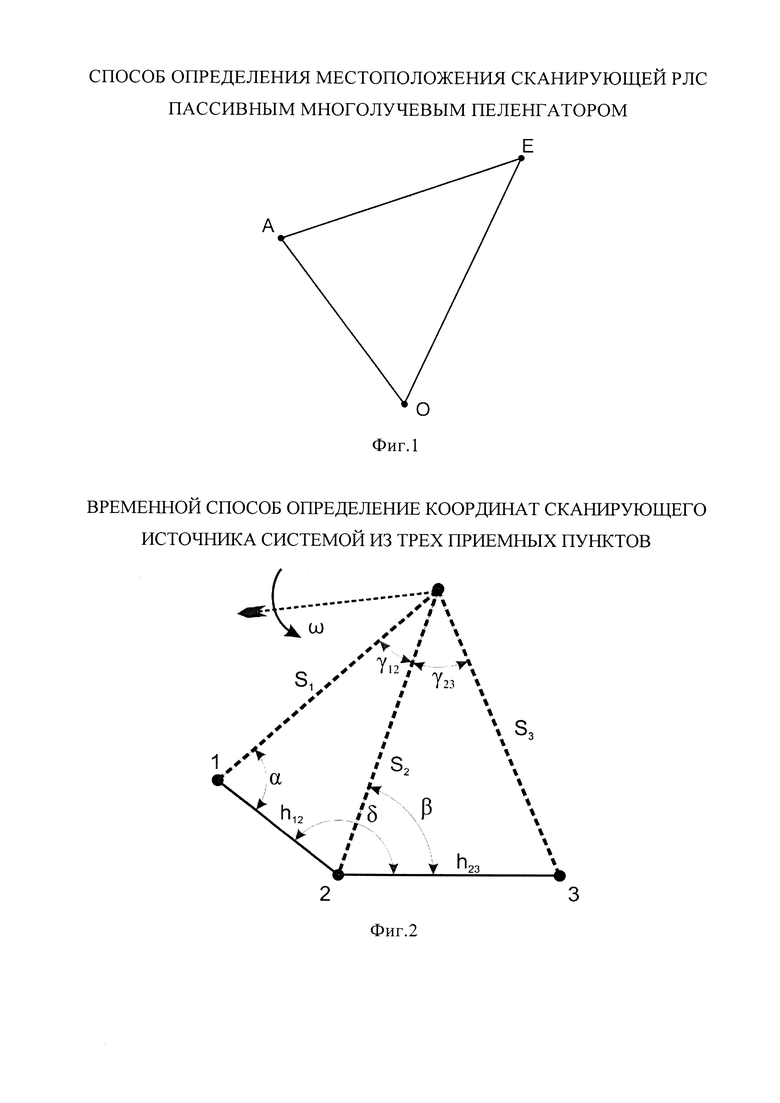
Способ поясняется фиг. 1, согласно которой в точке Е расположен импульсный передатчик РЛС, в точке О - пеленгатор, в точке А - единственный переотражающий объект. Импульсы, излученные передатчиком, приходят в точку приема О по прямому пути ЕО и по пути ЕАО, отразившись от объекта А. Приемный пункт имеет слабонаправленные антенны и способен принимать как прямые сигналы передатчика РЛС, излученные боковыми лепестками антенны РЛС, так и переотраженные от объектов поверхности сигналы при направлении на них главного лепестка антенны РЛС и измерять углы прихода прямого и переотраженного сигналов и задержку τ между ними. По задержке τ определяется разность длин путей прямого и переотраженного сигнала δ=сτ=ЕА+АО-ЕО, где с - скорость света.
Из последнего соотношения следует, что EA+AO=R+δ, где R - расстояние. Это означает, что точка А лежит на эллипсе, в фокусах которого расположены передающее и приемное устройства, и что сумма расстояний от любой точки эллипса до его фокусов равна R+δ.
Из фиг. 1 также следует, что для любой точки, находящейся на эллипсе, выполняется соотношение:

где α - угол между приемником и отражающим объектом,
x - горизонтальная координата точки эллипса,
y - вертикальная координата точки эллипса.
Подставляя формулу (4) в уравнение эллипса находим координаты x и у отражающего объекта А:


Дальность до источника радиоизлучения оценивается путем сравнения действительных координат xni, yni, занесенных в память компьютера, с рассчитанными по формулам (2) и (3), в которые были подставлены измеренные значения угла α, пространственная разность путей распространения сигналов δ и переменная величина R. За оценку дальности принимается такое значение R, при котором разность между рассчитанными и заложенными в память компьютера координатами минимальна. Вследствие неизбежности ошибок измерений полное совпадение рассчитанных координат и координат, занесенных в память компьютера, маловероятно и, как показывает практика, в зоне действия приемного пункта (пеленгатора) обычно имеется несколько отражающих объектов, которые могут быть использованы для определения дальности R, формула для оценки дальности R в этом случае может быть записана в виде:

где xi(R, α, δ) и yi(R, α, δ) - координаты i-го отражающего объекта.
В способе для определения дальности до РЛС необходима точная априорная информация о координатах переотражающих объектов, что на море принципиально невозможно, а на суше требует выполнения предварительных трудоемких измерений. Кроме того, в способе прототипа предполагается нахождение РЛС только в пределах лучей многолучевого пеленгатора, обусловленное использованием моноимпульсного метода пеленгации, что уменьшает функциональные возможности способа. Кроме того, необходимость использования сигнала, излученного антенной РЛС по боковым лепесткам, уменьшает дальность действия прототипа. Дальность оценивается вероятностным критерием, что допускает возможность появления грубых ошибок измерений.
Известно изобретение [3] «Адаптивный способ пассивной радиолокации». Способ заключается в измерении с приемных позиций двухпозиционного измерительного комплекса (ДИК) угловых координат и мощности излучения ИРИ, определении временной задержки прихода волнового фронта излучения ИРИ на позиции комплекса. Далее применяют параллельно триангуляционный, угломерно-разностно-дальномерный и угломерно-мощностной методы для определения координат местоположения ИРИ. Для каждого из методов определяют значение дисперсии дальности до ИРИ, затем сравнивают эти значения и выбирают те значения координат местоположения ИРИ, которые соответствуют наименьшему значению дисперсии. При равных значениях дисперсии используют правило нахождения среднего арифметического для значений одноименных координат, получаемых двумя или тремя методами.
Определение плоскостных координат местоположения ИРИ на базе ДИК возможно путем реализации триангуляционного метода (ТМ) или угломерно-разностно-дальномерным методом (УРДМ).
В соответствии с ТМ ([4], с. 494-495; [5]) координаты местоположения ИРИ определяются как точка (без учета ошибок пеленгования) пересечения пеленгов ИРИ, измеренных с разнесенных в пространстве позиций (пеленгаторов) ДИК. Для определения плоскостных координат местоположения ИРИ на основе ТМ достаточно ограничиться измерением только углов азимута на ИРИ с каждой позиции ДИК. Основными недостатками ТМ, ограничивающими его применение, являются низкая точность определения координат местоположения ИРИ при его нахождении в окрестности линии базы и (или) при больших дальностях до ИРИ.
УРДМ ([4], с. 497) основан на измерении угловых координат ИРИ и определении разности расстояний от него до позиций ДИК. Для определения плоскостных координат местоположения ИРИ на основе УРДМ достаточно измерить только один азимут и определить разность расстояний от ИРИ до позиций ДИК. Основным недостатком УРДМ являются ошибки, вызванные неодновременностью измерений.
Помимо классических методов пассивной радиолокации используются альтернативные методы определения координат местоположения ИРИ, основанные на других физических принципах.
В [6] показана возможность определения координат местоположения ИРИ на основе использования измерений лишь энергетических параметров излучения ИРИ. Однако для реализации метода [6] необходимо не менее четырех измерителей, распределенных в пространстве определенным образом.
В патенте [7] представлен способ определения наклонной дальности до движущегося ИРИ на базе однопозиционной измерительной системы. Для реализации указанного способа используются угловые и энергетические измерения. Существенным недостатком способа [7] является необходимость априорного знания скорости движения ИРИ.
Известны также энергетические методы [8-9], реализуя которые удается сформировать раздельные оценки дальности до ИРИ относительно каждой позиции ДИК (эти оценки используются далее для построения результирующей оценки координат местоположения ИРИ). Однако методы [8-9] имеют жесткие ограничения на точность пеленгования и ориентированы, в первую очередь, на узконаправленные и, как следствие, дорогостоящие антенные системы.
Известен временной способ местоопределения сканирующих источников излучения при наблюдении из нескольких приемных пунктов, описанный в [10]. Данный способ выбран в качестве прототипа. Способ позволяет определять дальность до источника излучения по известному расстоянию между приемными пунктами системы и измеренному пеленгу на ИРИ по формуле (5). Построение и пространственная конфигурация системы поясняется на фиг. 2.

где: α - угол между направлениями на ИРИ и ПП2 из точки местоположения ПП1 (фиг. 2); γ12 - угол между направлениями от ИРИ на приемные пункты ПП1 и ПП2, определяемый по формуле (6):

где: ω - угловая скорость сканирования ИРИ, которая вычисляется по измеренному периоду сканирования ИРИ; Δt12 - время задержки, измеряемое при последовательном облучении сканирующим ИРИ приемных пунктов ПП1 и ПП2.
Системой из трех приемных пунктов определение местоположения излучателя возможно без применения пеленгаторных устройств только за счет измерения интервалов времени между последовательным облучением приемных пунктов. В таком случае, направление на ИРИ определяется из тригонометрических соотношений в смежных углах по формуле (7):

Данным способом осуществляется расчет направления на излучатель, при этом необходимо учитывать угол, который характеризует ориентацию приемных пунктов системы относительно друг друга.
В способе расчет дальности до ИРИ базируется на измерении и расчете угловых мер в пространственной структуре МПРЛС (γ12, γ23, δ). Однако, такой подход будет вносить дополнительные ошибки в расчетах обусловленные не только ошибками рассчитываемых углов γ12, γ23, но и углом задаваемым в качестве исходных данных δ, например, за счет кривизны земли.
Задача по разработке метода позволяющего рассчитать координаты сканирующего ИРИ без учета пространственной конфигурации МПРЛС с минимально возможным количеством исходных данных, является актуальной.
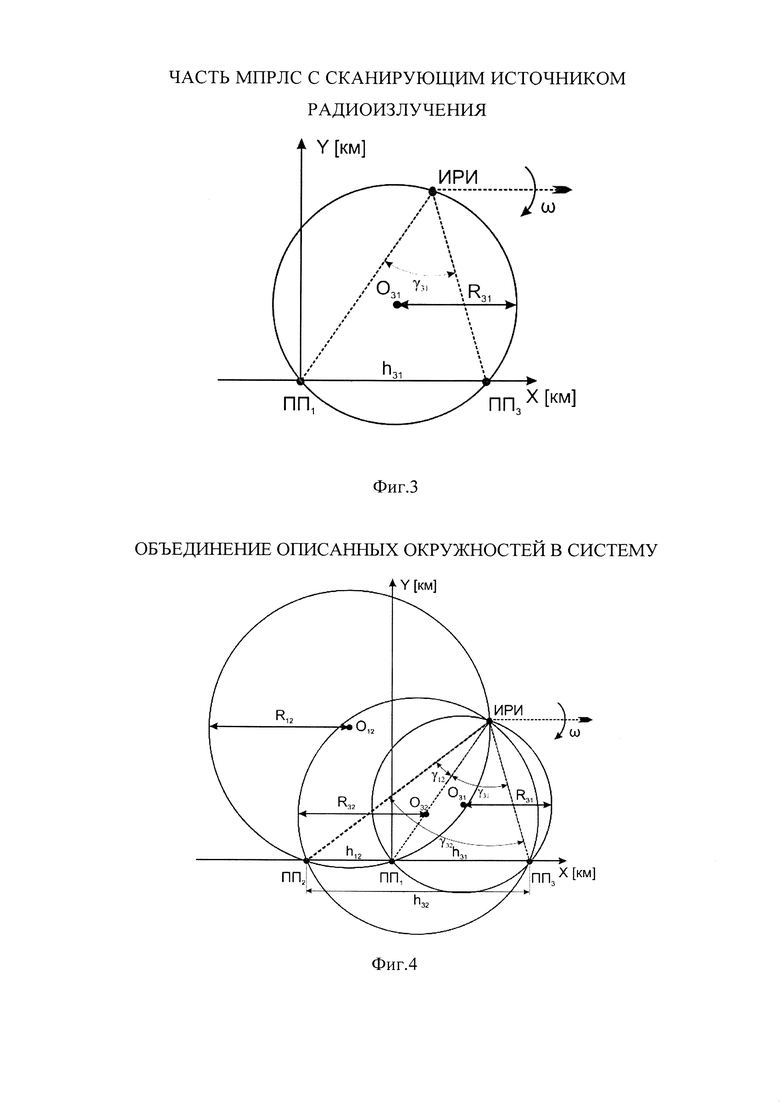
Часть системы, изображенная на фиг. 3, представляет собой треугольник, у которого известна одна сторона (h31) (отрезок соединяющий приемные пункты) и угол между направлениями от сканирующего ИРИ на приемные пункты (γ31) (вычисляется по времени задержки между последовательным облучением приемных пунктов и известной (измеренной) угловой скорости сканирования ИРИ). Известных величин не достаточно для решения треугольника и нахождения координат ИРИ. Поэтому определим кривую при нахождении, на которой ИРИ угол γ31 остается неизменным. Данная кривая представляет собой окружность (фиг. 3), где линия, соединяющая точки расположения приемных пунктов, является хордой (h31). Причем угол γ13 - угол, вписанный в окружность, опирающийся на хорду h31. Радиус полученной описанной окружности вычисляется по формуле (8):

Дальнейшее разложение МПЛРС на пары ПП и ИРИ даст еще две описанных окружности с различными радиусами (R12, R32). Объединение полученных описанных окружностей в единую систему даст точку пересечения всех трех окружностей, которая будет являться местоположением сканирующего ИРИ (фиг. 4).
Для нахождения координат местоположения сканирующего ИРИ необходимо составить и решить систему уравнений (9), описывающих полученные окружности.

где x, у - координаты ИРИ; x31, y31, x12, y12, x32, y32 - координаты центров окружностей; R31, R12, R32 - радиусы окружностей.
Решение двух любых уравнений в системе из (9) в общем виде (10), будет давать два решения, то есть две точки пересечения двух окружностей из трех. При этом определить координаты ИРИ возможно селекцией точек пересечения: точка нахождения ИРИ - искомая (координаты неизвестны), вторая точка пересечения - будет являться точкой стояния одного из приемных пунктов системы (координаты известны) (фиг. 5).

Координаты точек пересечения окружностей будут определяться выражениями (11)-(15):





где: x, у - координаты точек пересечения описанных окружностей; M1, M2, M3 - переменные замены, для упрощения выражений.
Координаты центров описанных окружностей (А, В) и (С, D) системы уравнений (10) находятся решением системы уравнений в общем виде (16):

где: xППn, yППn - координаты n-го приемного пункта; xППm, yППm - координаты m-го приемного пункта; Rnm - радиус описанной окружности вокруг n-го приемного пункта, m-го приемного пункта и ИРИ.
Координаты центра описанной окружности (А, В) радиусом Rnm находятся по формулам (17-21):





При нахождении центров описанных окружностей решается геометрическая задачи результатом решения которой будут две возможные точки нахождения центров окружностей, так как через две любые точки возможно провести две окружности равного радиуса с разными центрами фиг. 6. Рассматривая конфигурацию системы необходимо селектировать центры: выбирая точку - центр окружности с большим значением координаты y.
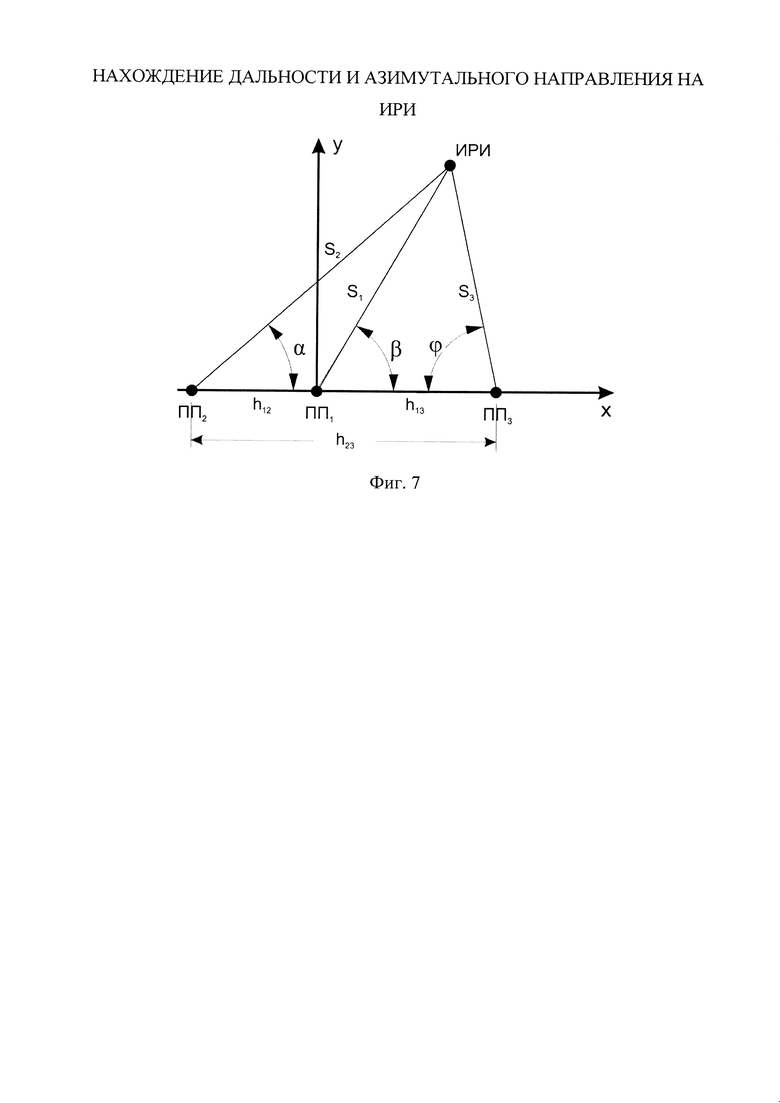
Таким образом, зная координаты сканирующего ИРИ и координаты приемных пунктов системы возможно определить дальность от каждого приемного пункта до ИРИ (фиг. 7) по формуле (23):

где: Sn - дальность от n-го приемного пункта до сканирующего ИРИ; x, у - координаты ИРИ; xППn, yППn - координаты n-го приемного пункта.
Азимутальное направление на ИРИ определяется решением треугольника по трем сторонам применяя теорему косинусов по формулам (24)-(26):



Таким образом предлагаемый способ позволяет определять дальности от приемных пунктов МПРЛС до сканирующего ИРИ и азимутальное направления на сканирующий ИРИ за счет измерения периода сканирования ИРИ, временных задержек последовательного облучения приемных пунктов МПРЛС без угловых измерений на ИРИ и учета пространственной ориентации приемных пунктов системы, что в свою очередь упрощает аппаратную реализации устройства приемных пунктов (отсутствие пеленгаторов).
Источники информации
1. Патент РФ на изобретение №2633962, МПК G01S 5/04 опубликован 20.10.2017 г.
2. Патент РФ на изобретение №2457505, МПК G01S 5/04, опубликован 27.07.2012 г.
3. Патент РФ на изобретение №2593149, МПК G01S 3/46, опубликован 27.07.2016 г.
4. Теоретические основы радиолокации / под ред. Я. Ширмана. М: Сов. радио. 1970. 561 с.
5. Булычев Ю.Г., Головской В.А. Обработка измерений угломерных систем в условиях априорной неопределенности // Радиотехника и электроника. 2010. Т. 55. №1. С. 71-77.
6. Сытенький В.Д. Пассивная локация на основе амплитудных измерений // Известия ВУЗов России. Радиоэлектроника. 2011. №1. С. 69-75.
7. Патент РФ №2406098, МПК G01S 3/00, опубликован 10.12.2010 г.
8. Евдокимов Ю.Ф., Медведев В.П. Амплитудная система определения местоположения источников излучения с использованием метода наименьших квадратов и исследование ее точности // Телекоммуникации. 2003. №11. С. 34-37.
9. Уфаев В.А., Афанасьев В.И., Разиньков С.П. Оценка координат источника радиоизлучения на основе измерений амплитуды электромагнитного поля // Радиотехника. 2003. №10. С. 71-73.
10. Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки местоопределения источников излучения. - М.: «Радиотехника», 2008. С. 134-139.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИЗЛУЧАЮЩЕЙ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2444748C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ СО СКАНИРУЮЩЕЙ ДИАГРАММОЙ НАПРАВЛЕННОСТИ | 2023 |
|
RU2807301C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2012 |
|
RU2519593C2 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |

Изобретение относится к области пассивной радиолокации и может быть использовано для определения дальности до сканирующего источника радиоизлучения и определения азимутального направления на сканирующий источник радиоизлучения в пассивных (полуактивных) многопозиционных радиолокационных системах, содержащих не менее трех синхронизированных по времени приемных пунктов, с совместной обработкой информации на одном из приемных пунктов. Достигаемый технический результат - возможность определения дальности и азимутального направления до сканирующего источника радиоизлучения без измерения пеленга на источник радиоизлучения пеленгаторными устройствами. Технический результат достигается за счет измерения периода сканирования источника радиоизлучения, расчета угловой скорости сканирования источника радиоизлучения, измерения временных задержек последовательного облучения приемных пунктов системы, осуществлении расчетов дальностей и азимутальных направлений до сканирующего источника радиоизлучения. 7 ил.
Временной способ определения дальности до сканирующего источника радиоизлучения, заключающийся в том, что с помощью пассивной или полуактивной многопозиционной радиолокационной системы (МПРЛС), состоящей минимум из трех приемных пунктов, произвольно расположенных на местности, синхронизированных по времени с осуществлением совместной обработки информации на одном из приемных пунктов, определяют дальность до сканирующего источника радиоизлучения (ИРИ) и азимутальное направление на ИРИ путем осуществления измерения периода сканирования ИРИ, на основании которого рассчитывают угловую скорость сканирования ИРИ, путем измерения временных задержек последовательного облучения сканирующим ИРИ приемных пунктов МПРЛС Δtnm (Δt12, Δt23, Δt13), по значениям которых рассчитывают углы γnm (γ12, γ23, γ13) от ИРИ на облучаемые приемные пункты, определяют окружности, описанные вокруг трех различных треугольников, образованных двумя приемными пунктами из МПРЛС и ИРИ, общей точкой пересечения трех окружностей является точка - нахождения ИРИ, причем координаты ИРИ определяют путем решения системы уравнений, состоящей из уравнений окружностей, для составления которой рассчитывают радиусы описанных окружностей Rnm по значению углов γnm, осуществляют расчет центров описанных окружностей Onm, для нахождения которых решают систему уравнений, по результатам решения которой осуществляют селекцию центров окружностей, выбирая точку - центр окружности - с наибольшим значением координаты y, по известным координатам приемных пунктов и сканирующего ИРИ вычисляют дальности от каждого приемного пункта МПРЛС до ИРИ, по известным дальностям от приемных пунктов до ИРИ вычисляют по теореме косинусов азимутальные направления на ИРИ относительно приемных пунктов МПРЛС.
| МЕЛЬНИКОВ Ю.П., ПОПОВ С.В | |||
| Радиотехническая разведка | |||
| Методы оценки местоопределения источников излучения | |||
| Москва, "Радиотехника", 2008, 432 с | |||
| ДАЛЬНОМЕРНЫЙ СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2506605C2 |
| RU 2015129272 A, 25.01.2017 | |||
| Антенный переключатель | 1930 |
|
SU20162A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| US 8654007 B2, 18.02.2014 | |||
| US 20070018884 A1, 25.01.2007. | |||

