Изобретение относится к радиотехнике, а именно к способам определения местоположения радиолокационной станции (РЛС) со сканирующей диаграммой направленности (ДН), и предназначено для использования в навигационных, пеленгационных, локационных средствах для определения местоположения РЛС со сканирующей ДН.
Известен способ определения координат источника радиоизлучения с борта летательного аппарата с использованием триортогональной рамочной антенной системы по патенту RUS №2709607 [1], согласно которому выполняют следующую последовательность действий:
принимают триортогональной рамочной антенной системой (ТОРАС) радиосигналы от ИРИ;
измеряют координаты центров и углы ориентации ТОРАС в различные моменты времени в процессе полета летательного аппарата;
определяют положения в пространстве векторов напряженности магнитного поля в различные моменты времени;
формируют вспомогательные плоскости положения ИРИ;
определяют линии положения ИРИ как линии пересечения каждой из вспомогательных плоскостей положения ИРИ с поверхностью Земли;
вычисляют координаты ИРИ в точке пересечения линий положения ИРИ.
Недостатком аналога является относительно низкая точность определения координат ИРИ в условиях многолучевого распространения радиоволн, обусловленная невозможностью исключения измерений, полученных по отраженной от различных препятствий волне.
Известен способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов по патенту RUS №2605457 [2], согласно которому выполняют следующую последовательность действий:
определяют расстояние  между первым спутником-ретранслятором (CP) CP1 и пользовательским терминалом (ПТ);
между первым спутником-ретранслятором (CP) CP1 и пользовательским терминалом (ПТ);
определяют расстояние  между вторым СР2 и ПТ;
между вторым СР2 и ПТ;
измеряют модуль  азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
вычисляют в УМС доплеровские сдвиги частот  первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно CP1 и СР2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат CP1, СР2 и определенных параметров
первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно CP1 и СР2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат CP1, СР2 и определенных параметров 
определяют, по меньшей мере, один из параметров: радиальную скорость  перемещения первого CP1 относительно ПТ, и/или радиальную скорость
перемещения первого CP1 относительно ПТ, и/или радиальную скорость  перемещения второго СР2 относительно ПТ, с учетом доплеровских сдвигов частот
перемещения второго СР2 относительно ПТ, с учетом доплеровских сдвигов частот 
вычисляют широту ϕпт и долготу λПТ ПТ.
Недостатком аналога является относительно низкая точностью определения координат ИРИ в условиях многолучевого распространения радиоволн, связанная с низкой точностью первичных измерений при наличии переотражений радиоволн от различных предметов.
Из известных способов наиболее близким аналогом (прототипом) заявленного способа по своей технической сущности является разностно-дальномерный способ определения местоположения источника радиоизлучения в условиях многолучевого распространения радиоволн (МРРВ) RUS №2714303 [3] заключающимся в том, что:
на каждом из приемных пунктов (ПП) с известными координатами принимают сигнал ИРИ и по нему измеряют время прихода сигнала, для всех возможных пар ПП вычисляют разности времен прихода сигналов от ИРИ до ПП этой пары и по ним вычисляют соответствующие разности дальностей,
формируют набор промежуточных оценок координат (ПОК) ИРИ путем определения разностно-дальномерным способом промежуточной оценки координат для каждой возможной комбинации из трех ПП,
из сформированных оценок составляют группы, каждая из которых содержит, по меньшей мере, четыре ПОК ИРИ,
для каждой сформированной группы вычисляют внутригрупповую дисперсию ПОК ИРИ,
выявляют ПП, находящиеся в условиях МРРВ по признаку превышения внутригрупповыми дисперсиями ПОК ИРИ предварительно заданного порога,
в наборе ПОК ИРИ оставляют только те ПОК ИРИ, которые получены без использования выявленных ПП, находящихся в условиях МРРВ,
для получения итоговой оценки координат ИРИ вычисляют среднее арифметическое оставшихся в наборе ПОК.
Недостатком способа прототипа [3] является относительно-невысокая точность определения координат РЛС со сканирующей диаграммой направленности (ДН), обусловленная тем, что в тот момент времени, когда на одном из ПП обеспечивается максимальная мощность радиосигнала (ММР) РЛС со сканирующей ДН, соответствующий моменту времени направления максимума ДН РЛС на указанный ПП, на остальных ПП мощность радиосигнала будет малой. В таких условиях измерение взаимной временной задержки будет производится с большими погрешностями и, как следствие, это будет приводить к относительно-невысокой точности определения координат РЛС.
Техническим результатом заявленного изобретения является достижение более высокой точности определения координат РЛС со сканирующей ДН.
Указанный технический результат достигается тем, что в известном способе определения местоположения РЛС со сканирующей ДН, заключающимся в том, что на каждом из ПП с известными координатами принимают радиосигнал РЛС со сканирующей ДН и измеряют разности времен прихода радиосигнала от РЛС до каждой из пар ПП, используя измеренные разности времен прихода радиосигнала от РЛС до пар ПП вычисляют координаты РЛС, предварительно выбирают район ведения радиомониторинга.
Устанавливают на земной поверхности не менее трех ПП на позициях с известными координатами. Измеряют период сканирования РЛС на одном из ПП используя моменты времени приема ММР РЛС указанным ПП в двух соседних периодах сканирования ДН РЛС.
Формируют не менее двух пар ПП. Для каждой пары ПП измеряют интервал времени между моментами приема ММР РЛС каждым из ПП, соответствующих моментам времени направления максимума ДН РЛС на указанные ПП в течении одного периода сканирования ДН РЛС. Для каждой пары ПП на основе измеренных периода сканирования ДН РЛС и разности моментов времени приема ММР РЛС каждым из ПП рассчитывают разность азимутов ПП, отсчитываемую от РЛС.
Для каждой пары ПП формируют линию положения (ЛП) РЛС, каждая точка которой имеет рассчитанную разность азимутов относительно ПП, путем построения двух симметричных сегментов окружностей на хорде, соединяющей ПП указанной пары. В качестве координат РЛС принимают координаты точки пересечения не менее двух ЛП РЛС.
При формировании пар ПП в качестве первого ПП выбирается один из ПП, называемый в дальнейшем центральным, а в качестве второго - различный для каждой пары ПП - поочередно каждый из оставшихся ПП за исключением центрального.
ЛП РЛС формируют с учетом поверхности Земли.
Благодаря указанной новой совокупности существенных признаков, в том числе за счет выбора района ведения радиомониторинга, измерения периода сканирования РЛС, формирования не менее двух пар ПП, измерении разности моментов времени приема ММР РЛС каждым из ПП для каждой пары ПП, расчета разностей азимутов ПП для каждой пары ПП, формирования линий положения РЛС, достигается технический результат изобретения: обеспечивается более высокая точность определения координат РЛС со сканирующей ДН. Заявленный способ поясняется чертежами, на которых показаны:
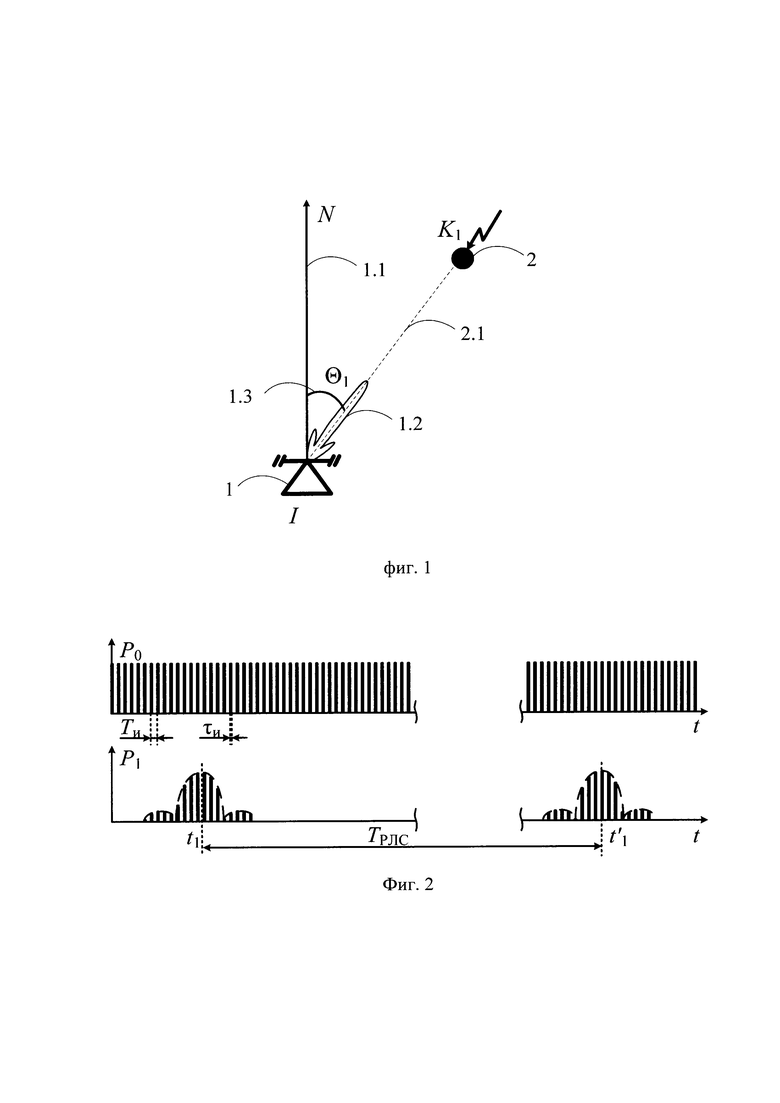
на фиг. 1 - геометрическая основа измерения периода сканирования РЛС со сканирующей ДН в момент времени, когда на первом ПП обеспечивается прием ММР РЛС со сканирующей ДН, соответствующий моменту времени направления максимума ДН РЛС на первый ПП;
на фиг. 2 - графики радиосигнала, излучаемого РЛС со сканирующей ДН и его отклики, принимаемые первым ПП в двух соседних периодах сканирования ДН РЛС;
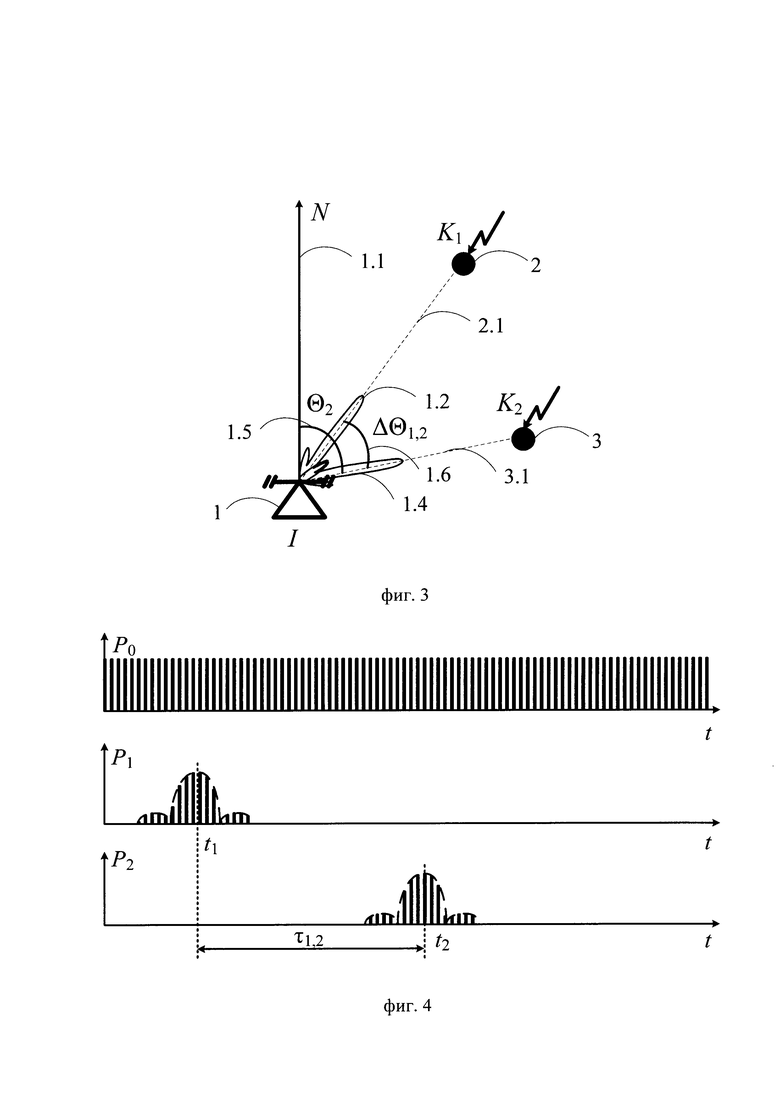
на фиг. 3 - геометрическая основа измерения разности моментов времени приема ММР РЛС каждым из пары ПП в моменты времени, когда последовательно сначала на первом ПП, а затем на втором ГШ обеспечивается прием ММР РЛС со сканирующей ДН, соответствующий моментам времени направления максимума ДН РЛС на первый ПП и на второй ПП соответственно;
на фиг. 4 - графики радиосигнала, излучаемого РЛС со сканирующей ДН и его отклики, принимаемые первым ПП и вторым ПП соответственно в течении одного периода сканирования ДН РЛС;
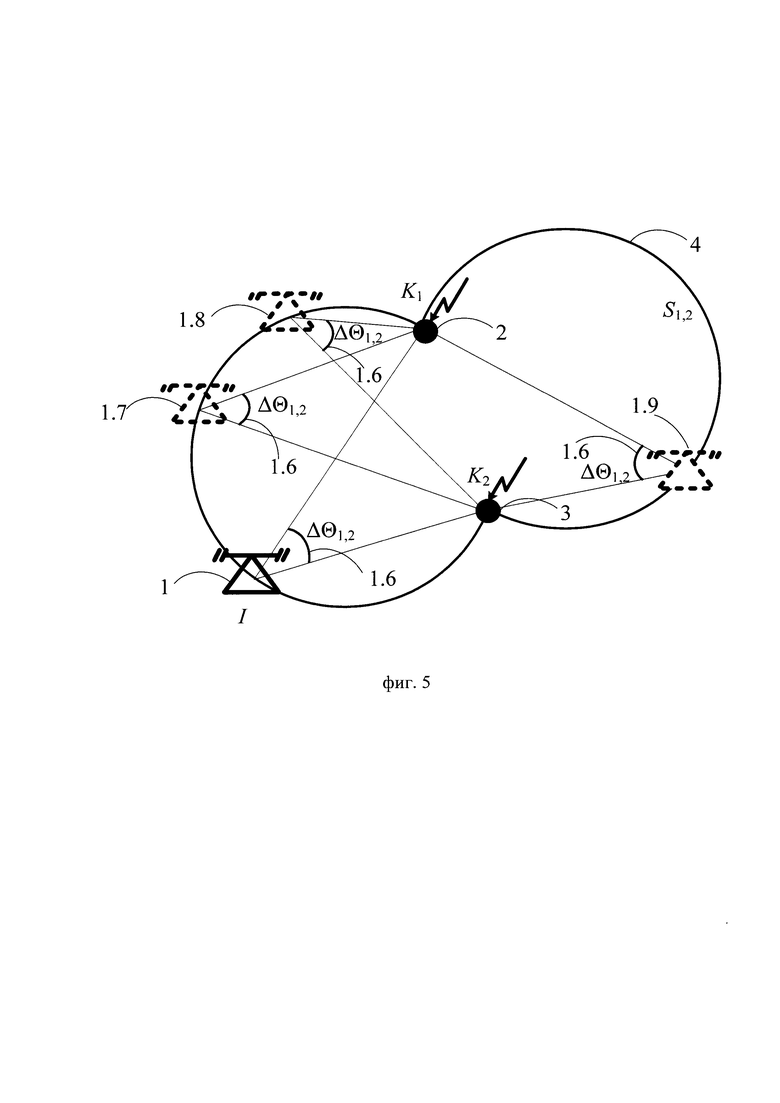
на фиг. 5 - геометрическая основа формирования ЛП путем построения двух симметричных сегментов окружностей на хорде, соединяющей первый и второй ПП;
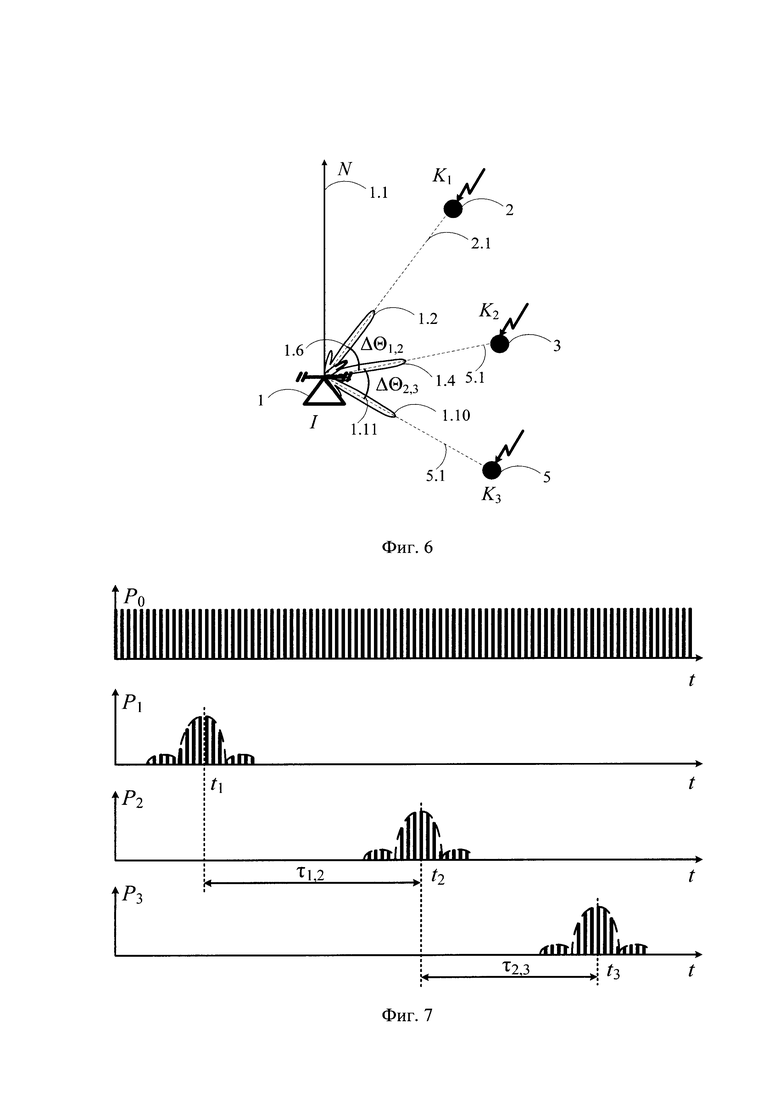
на фиг. 6 - геометрическая основа измерения разности моментов времени приема ММР РЛС каждым из пары ПП в моменты времени, когда последовательно сначала на первом ПП, а затем на втором ПП и третьем ПП обеспечивается прием ММР РЛС со сканирующей ДН, соответствующий моментам времени направления максимума ДН РЛС на первый ПП, на второй ПП и на третий ПП соответственно;
на фиг. 7 - графики радиосигнала, излучаемого РЛС со сканирующей ДН и его отклики, принимаемые первым ПП, вторым ПП и третьим ПП соответственно в течении одного периода сканирования ДН РЛС;
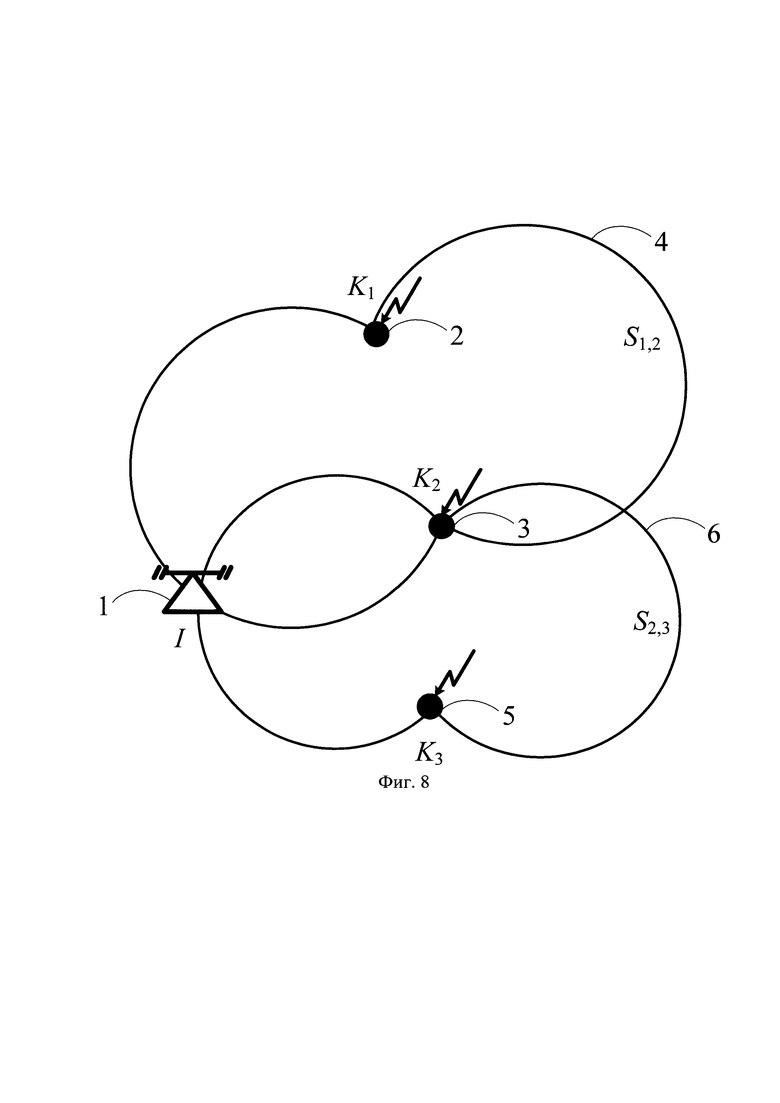
на фиг. 8 - геометрическая основа определения местоположения РЛС, как точки пересечения двух ЛП.
Сущность предлагаемого способа состоит в следующем. Полагают, что объект измерений, стационарная РЛС со сканирующей ДН, излучает радиосигналы в известной полосе частот ΔF. Предварительно установленные на земной поверхности не менее трех ПП на позициях с известными координатами, в соответствии с заранее выбранном районом ведения радиомониторинга, осуществляет прием радиосигналов согласованным с ними трактом.
Геометрическая основа измерения периода сканирования РЛС со сканирующей ДН, отображена на фиг. 1, которая включает: РЛС со сканирующей ДН I 1, первый ПП K1 2.
На фиг. 1 обозначены: направление на Север IN 1.1; ДН РЛС 1.2 в момент времени направления максимума ДН РЛС на первый ПП K1 2; азимут главного лепестка ДН РЛС Θ1 1.3 в момент времени направления максимума ДН РЛС на первый ПП K1 2; расстояние 2.1 от первого ПП K1 2 до РЛС со сканирующей ДН I 1.
На фиг. 2 на верхнем графике представлен радиосигнал P0(t), в виде последовательности радиолокационных импульсов с периодом следования импульсов Tи и длительностью импульса τи, излучаемый РЛС со сканирующей ДН. На нижнем графике фиг. 2 представлены отклики радиосигнала РЛС со сканирующей ДН, принимаемые первым ПП P1{t) в двух соседних периодах сканирования ДН РЛС.
Для измерения периода сканирования РЛС ТРЛС со сканирующей ДН, необходимо на одном из ПП (в качестве примера рассматривается первый ПП) измерить задержку между моментами времени приема ММР РЛС указанным ПП в двух соседних периодах сканирования ДН РЛС t1 и t'1 соответственно.
Геометрическая основа измерения разности моментов времени приема ММР РЛС каждым из пары ПП, соответствующих моментам времени направления максимума ДН РЛС на указанные ПП в течении одного периода сканирования ДН РЛС, для пары, состоящей из первого и второго ПП отображена на фиг. 3, которая включает: РЛС со сканирующей ДН I 1, первый ПП K1 2 и второй ПП K2 3.
На фиг. 3 обозначены: направление на Север IN 1.1; ДН РЛС 1.2 в момент времени направления максимума ДН РЛС на первый ПП K1 2; ДН РЛС 1.4 в момент времени направления максимума ДН РЛС на второй ПП K2 3; азимут главного лепестка ДН РЛС Θ2 1.3 в момент времени направления максимума ДН РЛС на второй ПП K2 3; разность азимутов первого и второго ПП ΔΘ1,2 1.6, отсчитываемая от РЛС; расстояние 2.1 от первого ПП K1 2 до РЛС со сканирующей ДН I 1; расстояние 3.1 от второго ПП K2 3 до РЛС со сканирующей ДН I 1.
На фиг. 4 на верхнем графике представлен радиосигнал P0(t), в виде последовательности радиолокационных импульсов с периодом следования импульсов Tи и длительностью импульса τи, излучаемый РЛС со сканирующей ДН. На среднем и нижнем графиках фиг. 4 представлены отклики радиосигнала РЛС со сканирующей ДН, принимаемые первым ПП P1(t) и вторым ПП P2(t) соответственно в течении одного периода сканирования ДН РЛС.
Для измерения разности моментов времени приема ММР РЛС каждым из пары ПП, состоящей из первого и второго ПП, соответствующих моментам времени направления максимума ДН РЛС на указанные ПП в течении одного периода сканирования ДН РЛС, необходимо зафиксировать и измерить задержку τ1,2 между моментами времени t1 и t2 приема ММР РЛС указанными ПП в течении одного периода сканирования ДН РЛС.
На фиг. 5 представлена геометрическая основа формирования ЛП S1,2 4 путем построения двух симметричных сегментов окружностей на хорде K1K2, соединяющей первый и второй ПП, которая включает: РЛС со сканирующей ДН I 1, первый ПП K1 2 и второй ПП K2 3. Сегменты окружностей, составляющих ЛП S1,2 4 строят так, чтобы каждая из их точек имела разницу пеленгов на первый и второй ПП, равную ΔΘ1,2 1.6.
На фиг. 5, кроме того, отображены вероятные местоположения РЛС 1.7, 1.8 и 1.9. Каждая из точек построенной ЛП S1,2 4, в соответствии с известной теоремой «Вписанные в окружность углы, опирающиеся на одну хорду равны, если они лежат по одну сторону хорды», является точкой вероятного местоположения. Таким образом, формирование ЛП S1,2 4, частично снимает неопределенность относительно местоположения РЛС со сканирующей ДН. Однако, для определения местоположения РЛС со сканирующей ДН необходимо формирование как минимум, еще одной ЛП.
Геометрическая основа измерения разности моментов времени приема ММР РЛС каждым из пары ПП, соответствующих моментам времени направления максимума ДН РЛС на указанные ПП в течении одного периода сканирования ДН РЛС, для пар, состоящих из первого и второго ПП, а также из второго и третьего ПП, отображена на фиг.6, которая включает: РЛС со сканирующей ДН I 1, первый ПП K1 2, второй ПП K2 3 и третий ПП K3 5.
На фиг. 6 обозначены: направление на Север IN 1.1; ДН РЛС 1.2 в момент времени направления максимума ДН РЛС на первый ПП K1 2; ДН РЛС 1.4 в момент времени направления максимума ДН РЛС на второй ПП K2 3; ДН РЛС 1.10 в момент времени направления максимума ДН РЛС на второй ПП K2 3; разность азимутов первого и второго ПП ΔΘ1,2 1-6, отсчитываемая от РЛС; разность азимутов второго и третьего ПП ΔΘ2,3 1.11, отсчитываемая от РЛС; расстояние 2.1 от первого ПП K1 2 до РЛС со сканирующей ДН I 1; расстояние 3.1 от второго ПП K2 3 до РЛС со сканирующей ДН I 1; расстояние 5.1 от третьего ПП K3 5 до РЛС со сканирующей ДН I 1.
На фиг. 7 на верхнем графике представлен радиосигнал P0(t), в виде последовательности радиолокационных импульсов с периодом следования импульсов Tи и длительностью импульса τи, излучаемый РЛС со сканирующей ДН. На трех нижних графиках фиг. 7 последовательно представлены отклики радиосигнала РЛС со сканирующей ДН, принимаемые первым ПП P1{t), вторым ПП P2(t) и третьим ПП Р3(t) соответственно в течении одного периода сканирования ДН РЛС.
Для измерения разности моментов времени приема ММР РЛС каждым из пары ПП, состоящей из первого и второго ПП, соответствующих моментам времени направления максимума ДН РЛС на указанные ПП в течении одного периода сканирования ДН РЛС, необходимо зафиксировать и измерить задержку τ1,2 между моментами времени t1 и t2 приема ММР РЛС указанными ПП в течении одного периода сканирования ДН РЛС.
Для измерения разности моментов времени приема ММР РЛС каждым из пары ПП, состоящей из второго и третьего ПП, соответствующих моментам времени направления максимума ДН РЛС на указанные ПП в течении одного периода сканирования ДН РЛС, необходимо зафиксировать и измерить задержку τ2,3 между моментами времени t2 и t3 приема ММР РЛС указанными ПП в течении одного периода сканирования ДН РЛС.
На фиг. 8 представлена геометрическая основа формирования двух ЛП S1,2 4 и S2,3 6. Формирование ЛП S1,2 4 раскрыто при описании фиг. 5. Формирование ЛП S2,3 6 производят путем построения двух симметричных сегментов окружностей на хорде K2K3, соединяющей второй и третий ПП. Сегменты окружностей, составляющих ЛП S2,3 6 строят так, чтобы каждая из их точек имела разницу пеленгов на первый и второй ПП равную ΔΘ2,3 1.11.
Имитационное моделирование заявленного способа определения местоположения РЛС в специальном программном обеспечении Matlab [4] показало повышение точности измерения координат РЛС по сравнению со способом прототипом на 30…50% (в зависимости от топологии - взаимного расположения РЛС и ПП), что указывает на возможность достижения указанного технического результата.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Богдановский С.В., Дедовская Э.Г., Севидов В.В., Симонов А.Н., Фокин Г.А. Способ определения координат источника радиоизлучения с борта летательного аппарата с использованием триортогональной рамочной антенной системы. Патент №2709607. МПК G01S 5/04 (2006.01). Бюл. №35 от 19.12.19. Заявка №2019100254 от 09.01.2019.
2. Волков Р.В., Саяпин В.Н., Севидов В.В. Способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов. Патент №2605457. МПК G01S 5/00 (2006.01). Бюл. №35 от 20.12.16. Заявка №2015139916 от 18.09.2015 г.
3. Борисов Е.Г., Фокин Г.А., Симонов А.Н., Севидов В.В. Разностно-дальномерный способ определения местоположения источника радиоизлучения в условиях многолучевого распространения радиоволн. Патент №2714303. МПК G01S 5/06 (2006.01). Бюл. №5 от 14.02.2020. Заявка №2019115359 от 20.05.2019.
4. Севидов В.В. Программа оценки точности разностно-дальномерной системы координатометрии, реализующей итерационный способ Ньютона-Рафсона. Программа для ЭВМ. Свидетельство о регистрации программы для ЭВМ 2022669149, 17.10.2022. Заявка №2022668341 от 10.10.2022.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ БЕЗ ИЗМЕРЕНИЯ ПЕЛЕНГА | 2018 |
|
RU2704029C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИЗЛУЧАЮЩЕЙ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2444748C2 |
| Способ обзора пространства | 2021 |
|
RU2765873C1 |
| Способ определения разности расстояний до постановщика многократной ответно-импульсной помехи в активно-пассивной многопозиционной радиолокационной системе | 2020 |
|
RU2745108C1 |
Изобретение относится к радиотехнике, а именно к способам определения местоположения радиолокационной станции (РЛС) со сканирующей диаграммой направленности (ДН), и предназначено для использования в навигационных, пеленгационных, локационных средствах для определения местоположения РЛС со сканирующей ДН. Техническим результатом заявленного изобретения является достижение более высокой точности определения координат РЛС со сканирующей ДН. Способ основан на приеме радиосигналов РЛС со сканирующей ДН каждым из приемных пунктов (ПП) с известными координатами. Для каждой пары ПП на основе измеренных периода сканирования ДН РЛС и разности моментов времени приема максимальной мощности радиосигнала (ММР) РЛС каждым из ПП рассчитывают разность азимутов ПП, отсчитываемую от РЛС. Для каждой пары ПП формируют линию положения (ЛП) РЛС, каждая точка которой имеет рассчитанную разность азимутов относительно ПП, путем построения двух симметричных сегментов окружностей на хорде, соединяющей ПП указанной пары, а в качестве координат РЛС принимают координаты точки пересечения не менее двух ЛП РЛС. 2 з.п. ф-лы, 8 ил.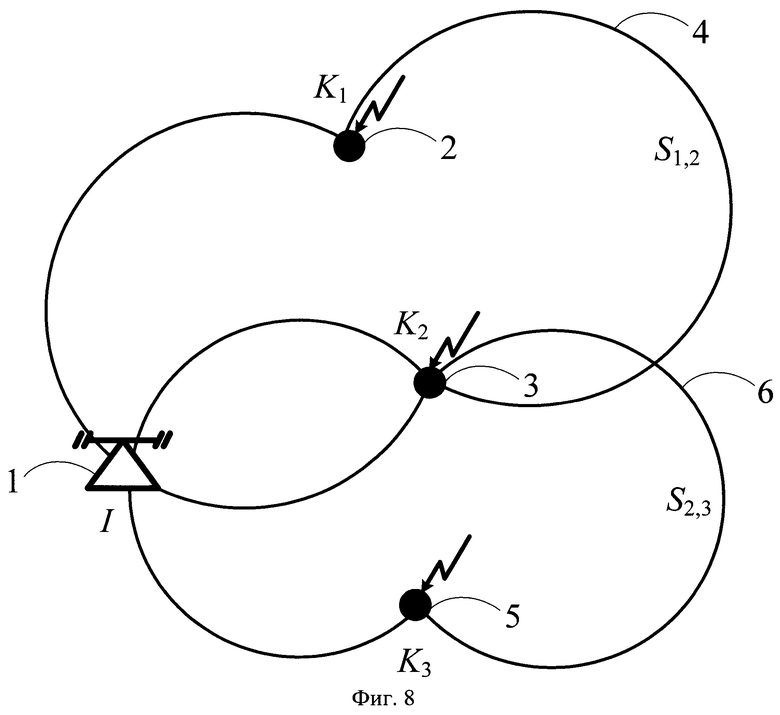
1. Способ определения местоположения радиолокационной станции (РЛС) со сканирующей диаграммой направленности (ДН), заключающийся в том, что на каждом из приемных пунктов (ПП) с известными координатами принимают радиосигнал РЛС со сканирующей ДН и измеряют разности времен прихода радиосигнала от РЛС до каждой из пар ПП, используя измеренные разности времен прихода радиосигнала от РЛС до пар ПП, вычисляют координаты РЛС, отличающийся тем, что предварительно выбирают район ведения радиомониторинга, устанавливают на земной поверхности не менее трех ПП на позициях с известными координатами, измеряют период сканирования РЛС на одном из ПП, используя моменты времени приема максимальной мощности радиосигнала (ММР) РЛС указанным ПП в двух соседних периодах сканирования ДН РЛС, формируют не менее двух пар ПП, для каждой пары ПП измеряют интервал времени между моментами приема ММР РЛС каждым из ПП, соответствующих моментам времени направления максимума ДН РЛС на указанные ПП в течение одного периода сканирования ДН РЛС, для каждой пары ПП на основе измеренных периода сканирования ДН РЛС и разности моментов времени приема ММР РЛС каждым из ПП рассчитывают разность азимутов ПП, отсчитываемую от РЛС, для каждой пары ПП формируют линию положения (ЛП) РЛС, каждая точка которой имеет рассчитанную разность азимутов относительно ПП, путем построения двух симметричных сегментов окружностей на хорде, соединяющей ПП указанной пары, а в качестве координат РЛС принимают координаты точки пересечения не менее двух ЛП РЛС.
2. Способ по п. 1, отличающийся тем, что при формировании пар ПП в качестве первого ПП выбирают один из ПП, называемый в дальнейшем центральным, а в качестве второго - различный для каждой пары ПП - поочередно каждый из оставшихся ПП за исключением центрального.
3. Способ по п. 1, отличающийся тем, что ЛП РЛС формируют с учетом поверхности Земли.
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ БЕЗ ИЗМЕРЕНИЯ ПЕЛЕНГА | 2018 |
|
RU2704029C1 |
| Разностно-дальномерный способ определения местоположения источника радиоизлучения в условиях многолучевого распространения радиоволн | 2019 |
|
RU2714303C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИЗЛУЧАЮЩЕЙ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2444748C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОЙ СКОРОСТИ ОБЗОРА НАПРАВЛЕННЫХ СКАНИРУЮЩИХ ИЗЛУЧАТЕЛЕЙ | 1974 |
|
SU1840865A1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| US 6515624 B1, 04.02.2003 | |||
| WO 03024050 A2, 20.03.2003 | |||
| US 8654007 B2, 18.02.2014. | |||

