Изобретение относится к области радиотехники и может использоваться в радиоразведке, радиомониторинге, при определении местоположения специальных электронных устройств перехвата информации (СЭУПИ).
Известно устройство для определения положения источников электромагнитного излучения (аналог) см. патент США №4383301 МПК G01S 5/02, 7/04, содержащее антенную решетку для приема излучений и формирования соответствующих сигналов, приемную систему для измерения фазы и интенсивности каждого принятого сигнала, устройство обработки сигналов для обработки когерентных сигналов фазы и амплитуды и воспроизведения направления на источник принятого излучения.
Известен также радиопеленгатор по заявке №1333546, Великобритания, МПК G01S 3/48, 3/10 (аналог), который имеет в своем составе антенную решетку, состоящую из нескольких пар равномерно разнесенных антенных элементов и устройство обработки. Сигналы с каждой пары антенных элементов поступают на фазовые дискриминаторы, которые осуществляют измерение разности фаз. Фазы сигналов, полученные с четырех наиболее далеко расположенных пар антенных элементов, преобразуются в четыре двоичных кода и усредняются путем суммирования. Логическое устройство устраняет неоднозначность и формирует двоичный сигнал, характеризующий угол прихода электромагнитной волны.
Недостатком аналогов является то, что с их помощью, возможно, определить лишь пеленг на источник радиоизлучения (ИРИ), тогда как для определения местоположения (пеленга и дальности) необходимо использовать как минимум два устройства, разнесенные на сравнительно большое расстояние.
Из известных устройств наиболее близким по технической сущности к заявляемому (прототипом) является фазовый пеленгатор, схема которого приведена на рисунке 8.1 с.195 В.А. Чердынцев «Радиотехнические системы». Минск, «Вышэйшая школа», 1988, 369 с.
Известный фазовый пеленгатор содержит первую и вторую антенны, разнесенные на определенное расстояние, первый и второй приемные тракты, связанные входами с первой и второй антеннами соответственно и первый фазовый детектор, связанный одним входом с выходом первого приемного тракта, вторым входом с выходом второго приемного тракта, а выход фазового детектора является выходом пеленгатора.
Принцип измерения угловых координат источников излучения или отражения радиоволн в известном пеленгаторе реализуется путем сравнения в фазовом детекторе сигналов, принятых антеннами, при этом напряжение на выходе фазового детектора пропорционально угловому положению объекта пеленгации.
Недостатком прототипа является отсутствие возможности определения дальности до СЭУПИ, поскольку, чтобы определить местоположение СЭУПИ необходимо использовать, по крайней мере, два пункта приема, разнесенные на значительные расстояния.
Вместе с тем в настоящее время актуальной является задача определения местоположения СЭУПИ в одном пункте приема при относительно небольших дальностях.
Анализ показывает, что эта задача может быть решена угломерно-дальномерным способом на основе измерения фазовых сдвигов в элементах антенных пар и формировании узкой области отчета измеряемых параметров (пеленга и дальности) путем обработки сигнала с учетом сферичности фронта волны и на основе процедур пересечения и объединения.
Задача на решение которой направлено заявляемее устройство состоит в формировании узкой области отчета измеряемых параметров (пеленга и дальности) путем обработки сигнала с учетом сферичности фронта волны и на основе процедур пересечения и объединения.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в определении дальности до ИРИ.
Технический результат достигается тем, что в известный фазовый пеленгатор, содержащий первую и вторую антенны, разнесенные на определенное расстояние, первый и второй приемные тракты, связанные входами с первой и второй антеннами соответственно и первый фазовый детектор, связанный первым входом с выходом первого приемного тракта, а вторым входом с выходом второго приемного тракта, введены третья антенна, третий приемный тракт, связанный входом с третьей антенной, второй фазовый детектор, связанный одним входом с выходом второго приемного тракта, а другим входом с выходом третьего приемного тракта, третий фазовый детектор, связанный одним входом с выходом первого приемного тракта, а другим входом с выходом третьего приемного тракта, частотомер, связанный входом с выходом второго приемного тракта, блок пересечения, связанный одним входом с выходом первого фазового детектора, а другим входом с выходом второго фазового детектора, блок объединения, связанный одним входом с выходом первого фазового детектора, а другим входом с выходом второго фазового детектора, блок определения пеленга, связанный одним входом с выходом блока пересечения, вторым входом с выходом блока объединения, а третьим входом с выходом третьего фазового детектора, блок определения дальности, связанный одним входом с выходом частотомера, вторым входом с выходом блока пересечения, третьим входом с выходом блока определения пеленга, а выходы блока определения пеленга и блока определения дальности являются выходами фазового пеленгатора.
Сущность предлагаемого изобретения заключается в получении узкой области отсчета пеленга и дальности с учетом сферичности фронта волны из сигналов пересечения и объединения, которые формируются из входных сигналов, поступающих на антенны, жестко связаны этой областью и последующем определении дальности до ИРИ.
На фигуре 1 представлена структурная схема фазового пеленгатора. На фигурах 2-7 показаны зависимости амплитуд сигналов от угла отклонения для различных точек схемы. На фигурах 8-11 представлены статистические показатели качества и результаты имитационного моделирования пеленгатора.
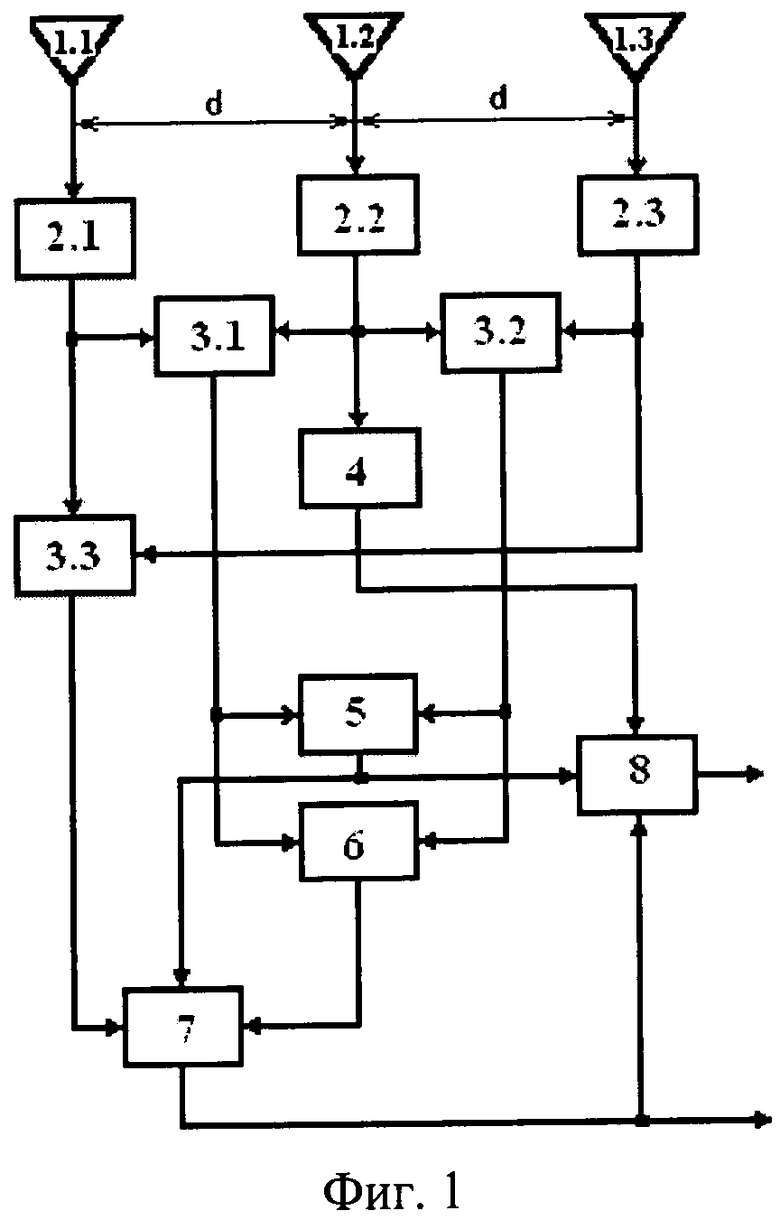
Фазовый пеленгатор (фигура 1) содержит первую 1.1, вторую 1.2 и третью 1.3 антенны, расположенные на одной линии и разнесенные на расстояние d, первый 2.1, второй 2.2 и третий 2.3 приемные тракты, первый 3.1 и второй 3.2 фазовые детекторы, частотомер 4, третий фазовый детектор 3.3, блок пересечения 5, блок объединения 6, блок определения пеленга 7, блок определения дальности 8.
Третья антенна 1.3, третий приемный тракт 2.3 и второй фазовый детектор 3.2 позволяют получить на выходе фазового детектора дополнительное напряжение, пропорциональное разности. фаз между центральной и крайней антеннами, которое необходимо для учета сферичности фронта волны при обработке сигналов.
Частотомер 4 позволяет определить частоту сигнала ИРИ на основе панорамного анализа энергетического спектра.
Третий фазовый детектор 3.3 позволяет получить на его выходе напряжение, пропорциональное разности фаз между сигналами, принимаемыми крайними антеннами, необходимое для фиксации пеленга на нормали к базе антенной системы.
Блок пересечения 5 и блок объединения 6 позволяет выделить узкую область отсчета измеряемых параметров, как для определения самого пеленга, так и для расчета дальности до источника излучения.
Блока определения пеленга 7 обеспечивает выдачу сигнала пеленга ИРИ на основе текущего значения угла, отсчитываемого, например, от направления на Север в момент, когда база антенны находится на нормали к направлению на источник излучения.
Блока определения дальности 8 позволяет рассчитать дальность до источника излучения, используя для этого сигнал с выхода блока 5, несущий информацию о дальности, измеренное значение частоты с выхода частотомера 4 и сигнал пеленга с выхода блока определения пеленга 7, необходимый для определения момента нахождения ИРИ на направлении нормали к базе антенной системы и расчета дальности.
Дальномер-пеленгатор работает следующим образом.
Моделирование проведено для положения ИРИ под углом β, отсчитываемым между направлением на центральную антенну 1.2 и направлением на Север. Сканирование по углу производится с дискретностью в один градус
Антенными элементами 1.1, 1.2, 1.3, в качестве которых приняты элементы в виде активный вибратор-рефлектор с конкретными параметрами и аналитическим заданием, принят гармонический немодулированный с полностью известными параметрами сигнал, где в качестве шума взят случайный процесс с нормальным распределением мгновенных значений, нулевым средним и заданной дисперсией. Информация о дальности и пеленге ИРИ вводится в начальную фазу входных сигналов относительно средней антенны. Выбор частоты дискретизации произволен исходя из минимизации погрешности определения дальности
Мгновенные значения принимаемых сигналов на выходах антенн 1.1, 1.2 и 1.3 могут быть представлены в виде:



Здесь n1(t), n2(t), n3(t) собственные шумы соответствующих приемников, пересчитанные на входы; φ1, φ2, φ3 - начальные фазы сигналов, несущие информацию о пеленге β и дальности R до источника радиоизлучения относительно центральной антенны; F1, F2, F3 - нормированные диаграммы направленности соответствующих антенн в направлении θ; Um1, Um2, Um3 - амплитуды сигналов; ω=2πf - круговая частота сигнала, где f - его циклическая частота.
Учитывая, что расстояние от центральной антенны до источника излучения намного больше расстояния между антеннами, антенны слабонаправленные и одинаково ориентированные можно принять значения нормированных диаграмм одинаковыми F1(θ)=F2(θ)=F3(θ)=F(θ). Можно полагать также одинаковыми амплитуды сигналов Um1=Um2=Um3=Um.
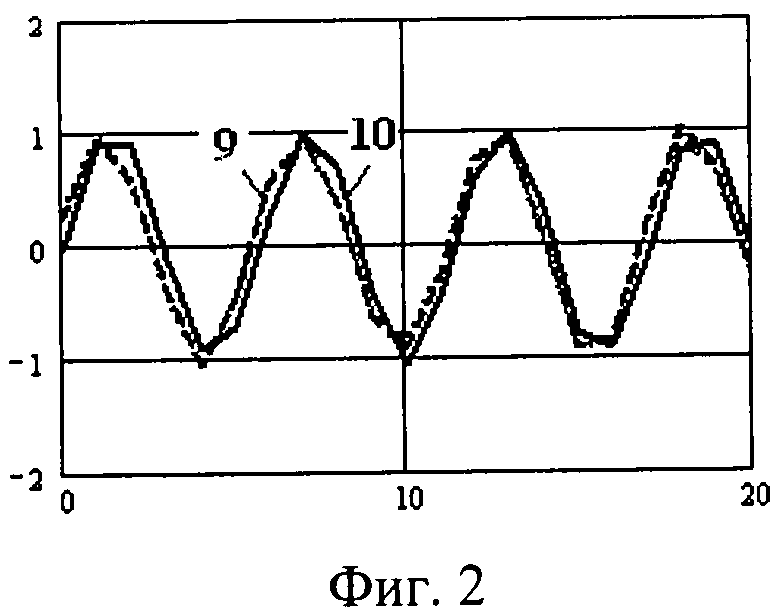
В радиоприемных трактах 2.1, 2.2, 2.3 соответствующего канала сигналы подвергаются преобразованию и усилению на радиочастоте. При этом необходимым условием является одинаковость этого усиления и одинаковость фазочастотных характеристик в полосе пропускания. Вид сигналов на выходах антенн в момент определения пеленга и дальности представлен на фигуре 2 в координатах амплитуда - время.
Здесь кривая 9 соответствует U1.1(t), 10 - U1.2(t) и U1.3(t). Сигналы U2(t) и U3(t) совпадают, так как представлены на момент, когда база антенны находится на нормали к направлению на источник радиоизлучения, т.е. φ1=φ3, а амплитуда сигнала намного больше уровня шума Um>>n(t).
Временное смещение кривых свидетельствует о наличии фазового сдвига между сигналами, принятыми центральной 1.2 и крайними антеннами 1.1 и 1.3 Ф1.2=Ф3.2≠0, а «ломаный» характер - o дискретизации.
Сигналы (1) и (3) с выходов первого 2.1 и третьего 2.3 приемных трактов поступают на первые входы фазовых детекторов 3.1 и 3.2 соответственно. Сигнал (2) с выхода второго приемного тракта 2.2 является опорным и поступает на вторые входы фазовых детекторов 3.1 и 3.2.
Сигналы на выходах фазовых детекторов 3.1 и 3.2 соответственно будут:


где Ф1,2, Ф3,2 - фазовые сдвиги между сигналами, принятыми центральной 1.2 и крайними антеннами 1.1 и 1.3 соответственно.
Сигналы с выходов первого 2.1 и третьего 2.3 приемных трактов подаются также на первый и второй входы третьего фазового детектора 3.3, сигнал на выходе которого приобретает вид, аналогичный (4) и (5):

где Ф1,3 - фазовый сдвиг между сигналами, принятыми крайними антеннами 1 и 3.
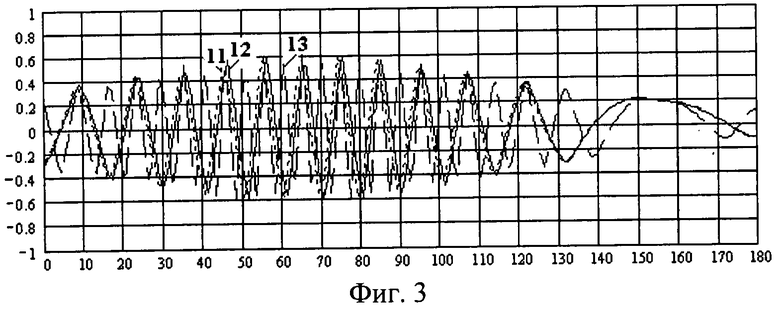
Сигналы, соответствующие (4), (5) и (6) на выходе фазовых детекторов 3.1, 3.2, 3.3, представлены на фигуре 3.
Здесь кривые 11, 12, 13 представляют сигналы с выходов фазовых детекторов 3.1, 3.2 и 3.3 соответственно. Горизонтальная ось соответствует текущему углу θ в градусах, вертикальная - нормированной амплитуде сигнала, пропорциональной фазовым сдвигам.
Характерным является циклический характер, обусловленный «сбросом фазы», кратным 2π, что может приводить к неоднозначности выбора области измерения параметров, а также поведение кривых в окрестностях точки пеленга, обеспечивающее формирования признаков определения этой области.
Следует обратить внимание на модуляцию сигналов диаграммой направленности антенны F(θ), позволяющую исключить неоднозначность за счет приема по боковым лепесткам.
Далее следует процесс формирования области измерения (отсчета) параметров и, прежде всего, пеленга. Для формирования узкой области отсчета параметров (пеленга и дальности) и повышения точности измерения используются блок пересечения 5, блок объединения 6 и сигнал (6) с выхода третьего фазового детектора (блок 3.3). Сигналы (4) и (5), пропорциональные фазовым сдвигам Ф1,2 и Ф3,2, подаются на первый и второй входы блока пересечения 5, который сопоставляет сигналы (4) и (5) в соответствии со свойствами процедуры пересечения, выделяя общие области. Блок пересечения 5 реализует алгоритм:

Те же сигналы (4) и (5) подаются одновременно на первый и второй входы блока объединения 6, напряжение, на выходе которого в соответствии со свойствами этой процедуры будет реализовать следующий алгоритм:

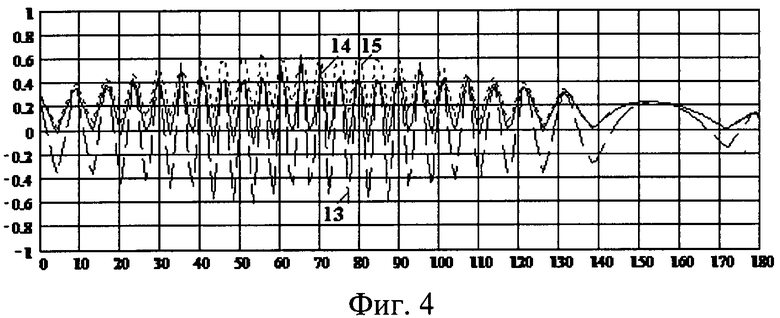
Вид сигналов (7), (8) и (6) представлен на фигуре 4.
Здесь это кривые 14, 15, 13 соответственно в секторе углов 0-180°.
Анализ показывает, что исходя из свойств используемых процедур, сигнал объединения (15) как бы «накрывает» сигнал пересечения (14) и практически всегда выполняется неравенство U6(θ)>U5(θ) кроме области (точки), где U6(θ)=U5(θ) и еще двух точек, где из-за цикличности косинуса указанное неравенство нарушается. Однако эти точки в процессе дальнейшей обработки могут быть исключены из анализа за счет амплитудных отличий.
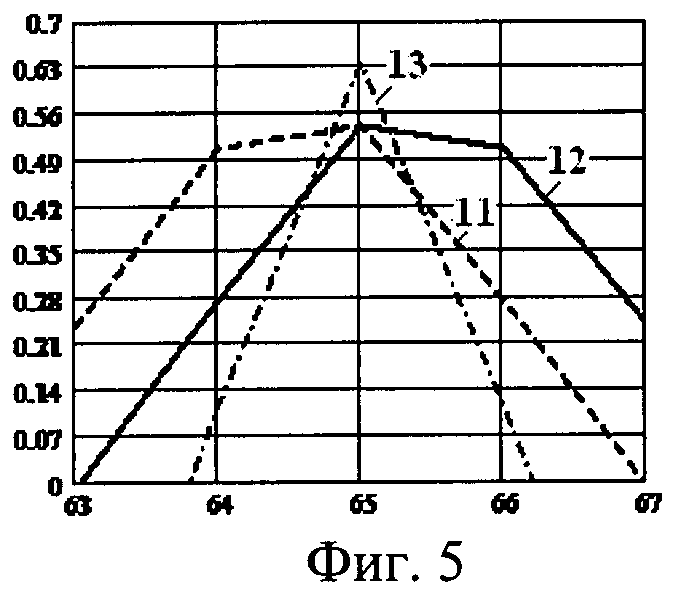
Для пояснения процесса формирования области измерения рассмотрим поведение рассматриваемых зависимостей в окрестностях пеленга, показанных на фигурах 5, 6.
На фигуре 5 планом в области пеленга изображены сигналы (4) и (5) на выходах фазовых детекторов (блоки 3.1, 3.2), пропорциональные фазовым сдвигам Ф1,2 и Ф3,2, кривые 11 и 12, между центральной и крайними антеннами, а также сигнал (6) на выходе блока 3.3, пропорциональный фазовому сдвигу Ф1,3, кривая 13, между крайними антеннами. Пеленг на ИРИ для примера принят равным 65°.
Как видно из фигуры 5 в точке пеленга имеет место равенство фазовых сдвигов Ф1,2 (кривая 11) и Ф3,2 (кривая 12). При этом Ф1,2≠0 и Ф3,2≠0 и зависят от дальности R. Значение Ф1,3 (кривая 13) в точке пеленга максимально. Поведение зависимостей фазовых сдвигов Ф1,2, Ф3,2 и Ф1,3 в области пеленга делает целесообразным использовать алгоритм обнаружения-измерения на основе совместного применения процедур пересечения (5) и объединения (6) для выделения узкой области отсчета пеленга и дальности.
Сигналы (4) и (5), пропорциональные фазовым сдвигам Ф1,2 и Ф3,2, подаются на первый и второй вход блока пересечения 5 и на первый и второй вход блока объединения 6.
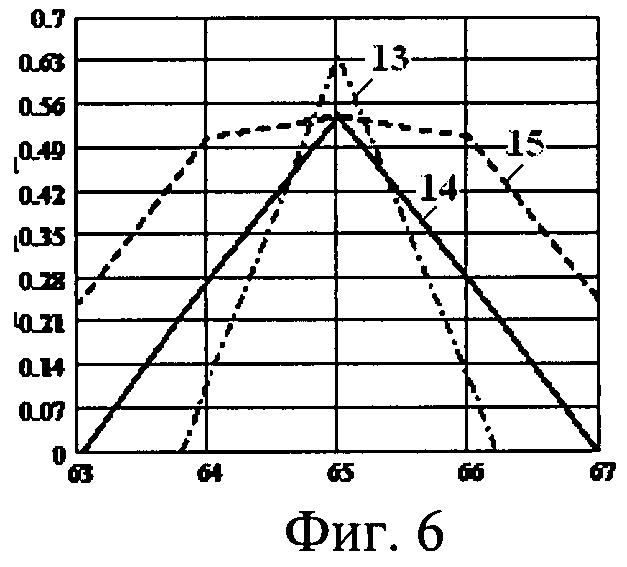
На фигуре 6 представлены выходные сигналы блока пересечения 5 (кривая 14), блока объединения 6 (кривая 15) и повторена для сравнения кривая 13 из фигуры 5 - сигнал (6) на выходе блока 10, пропорциональный фазовому сдвигу Ф1,3 между крайними антеннами.
Как видно из фигур, блок пересечения 5 формирует сигнал с экстремумом в точке пеленга в виде обостренного пика (фигура 6, кривая 14). Амплитуда этого экстремума определяется дальностью до ИРИ, поскольку это точка совпадения фазовых сдвигов сигналов между центральной и крайними антеннами. Поэтому сигнал (7) с выхода блока пересечения 5 подается в блок определения дальности 8 на его второй вход для расчета этой дальности.
Наоборот, блок объединения 6 формирует сигнал (8) с плоской вершиной (фигура 6, кривая 15), совпадающий с сигналом пересечения (7) только в точке пеленга и существенно отличающийся вне этой точки.
Таким образом, совместное применение процедур пересечения и объединения позволяет выделить узкую область отсчета измеряемых параметров, а значит повысить точность определения дальности и пеленга.
Для разделения гипотез о сферическом или плоском фронте волны служит сигнал (6) с выхода третьего фазового детектора 3.3 (кривая 13, фигура 5, 6), точнее, разность между этим сигналом и сигналом (7) с выхода блока пересечения 5.
При возрастании дальности до ИРИ амплитуда сигнала пересечения (7) в точке пеленга увеличивается, стремясь в пределе к амплитуде сигнала (6) с выхода третьего фазового детектора 3.3. Разность, соответственно, уменьшается. Эта разность формируется в блоке определения пеленга 7 в виде:

где С≥1, пороговый коэффициент, значение которого зависит от требуемых показателей качества обнаружения-измерения.
Таким образом, блок пересечения 5 фиксирует равенство фазовых сдвигов Ф1,2 и Ф3,2 в направлении пеленга совместно с блоком объединения 6. На выходе блока определения пеленга 7 формируется сигнал пеленга источника излучения на основе текущего значения угла, отсчитываемого, например, от направления на Север. Этот сигнал формируется в момент, когда база антенны находится на нормали к направлению на источник излучения при выполнении условия:

Первый порог UП1 выбирается исходя из дальней границы требуемой зоны обзора по дальности Rmax и заданного уровня шумов приемника. Второй порог UП2 выбирается в соответствии с ближней границей этой зоны Rmin. Выбор Rmin и Rmax связан с анализом зависимостей фазового сдвига от относительной дальности R/λ при фиксированных и различных относительных базах d/λ рассчитанных по формуле:

для заданных d и λ с учетом особенностей решаемой задачи определения местоположения ИРИ.
При исследовании зависимости (11) видно, что рабочим участком следует считать нелинейный участок, граница которого со стороны больших R/λ определяется параметрической чувствительностью применяемого способа оценки дальности, а со стороны малых R/λ физическими условиями и допустимой погрешностью.
Сигнал пеленга с выхода блока определения пеленга 7 поступает на вход блока определения дальности 8 в момент нахождения источника излучения на направлении нормали к базе антенной системы и, одновременно, подается на выход пеленгатора в качестве измеренного параметра ИРИ.
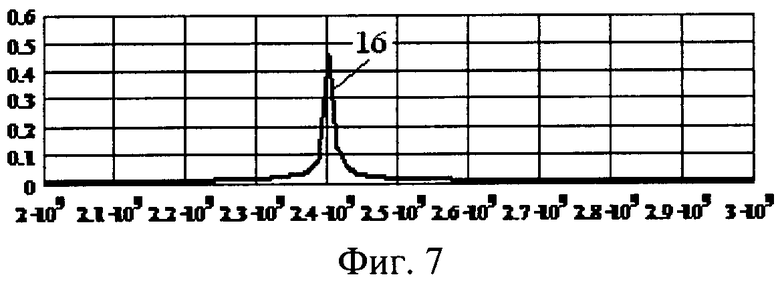
Для определения частоты сигнал опорного канала с выхода приемного тракта 2.2 поступает на частотомер 4, который по максимуму огибающей спектра сигнала (фигура 7, кривая 16) определяет его частоту.
С выхода частотомера 4 найденное значение частоты F* поступает на третий вход блока определения дальности 8.
Блок определения дальности 8 производит расчет дальности до ИРИ, используя для этого сигнал (7) с выхода блока пересечения 5, несущий информацию о дальности, и измеренное значение частоты F* с выхода частотомера 4. Расчет производится в момент нахождения источника излучения на направлении нормали к базе антенной системы (на направлении пеленга θ=β). Этот момент определяется поступлением сигнала пеленга с выхода блока определения пеленга 7 на третий вход блока определения дальности 8. Оценка дальности R* выдается в качестве измеренного параметра. Можно показать, что расчетное соотношение, реализуемое в блоке 8, имеет вид:
где a - отношение расстояния между антенными элементами к длине волны.
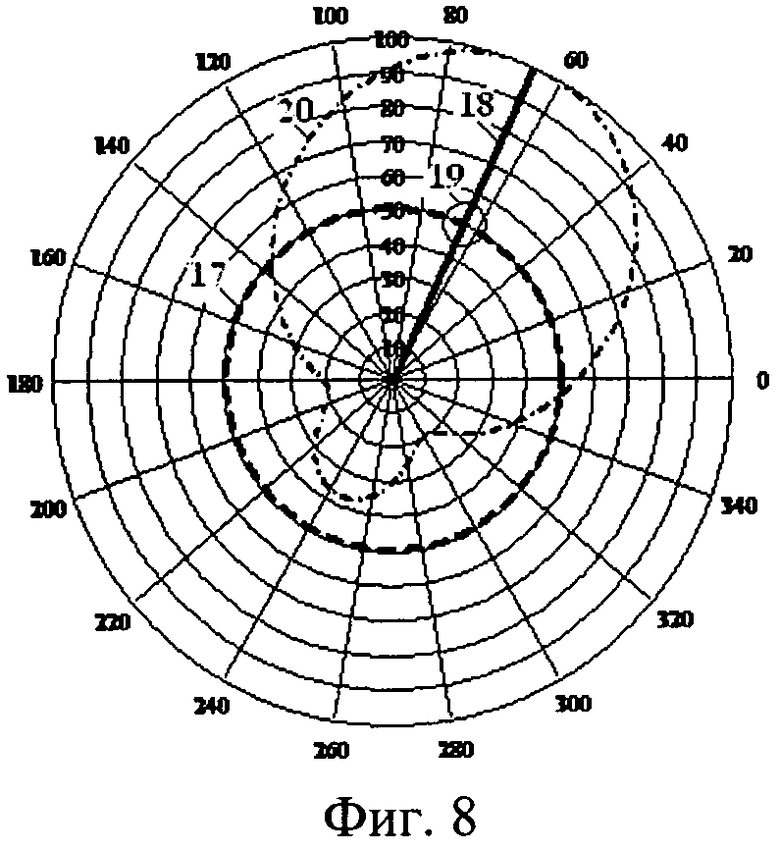
На фигуре 8 представлены выходные сигналы блоков определения дальности и пеленга в полярных координатах, где 17 - рассчитанная дальность; 18 - пеленг; 19 - местоположение источника излучения на пересечении линий пеленга и дальности; 20 - нормированная диаграмма направленности антенного элемента.
Для оценки эффективности предлагаемой схемы фазового пеленгатора необходимо определение статистических показателей качества, проведенное на основе имитационного моделирования.
Исследование работоспособности схемы показало, что при обнаружении и измерении частоты и пеленга в условиях шумов наиболее критичным является обнаружение пеленга. Кроме того, именно значение напряжения пеленга, формируемое как пересечение фазовых сдвигов каналов приема относительно опорного канала, является пороговым при ограничении зоны обзора по дальности для разделения гипотез о форме фронта приходящей волны. Это же напряжение используется в качестве параметра в расчетном соотношении для определения дальности. Поэтому в силу указанных обстоятельств за показатели качества приняты следующие вероятностные показатели:
1. Вероятность ложного срабатывания (ложной тревоги) при определении пеленга в условиях действия только шума РЛТ;
2. Вероятность правильного обнаружения пеленга РОБ;
3. Относительная погрешность измерения дальности δR.
Рассматриваемые вероятностные показатели определялись как вероятности в частотном смысле, т.е. как отношение числа положительных исходов n, определяемое счетчиком на выходе блока определения пеленга 7 к общему числу опытов  .
.
Положение антенной системы фиксировалось в направлении на ИРИ. Принятые модели сигнала и шума оговорены ранее.
Далее на фигурах 9-11 представлены характеристики показателей качества, полученные в результате моделирования.
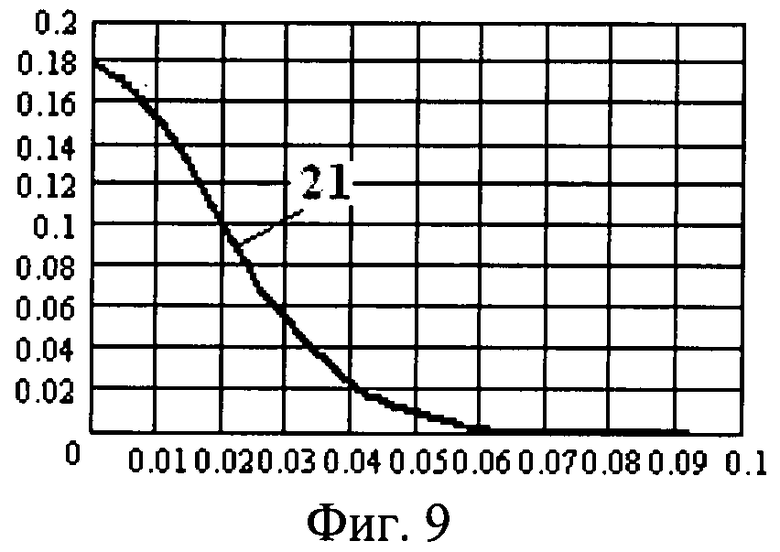
Сглаженная зависимость вероятности ложной тревоги при обнаружении пеленга от относительного порога обнаружения приведена на фигуре 9, кривая 21 в виде  .
.
Здесь Uпор - значение первого порогового напряжения; σш - среднеквадратическое значение шума на выходах приемников каналов обработки. В модели принято, что σш1=σш2=σш3=σш. При этом шумы не коррелированны.
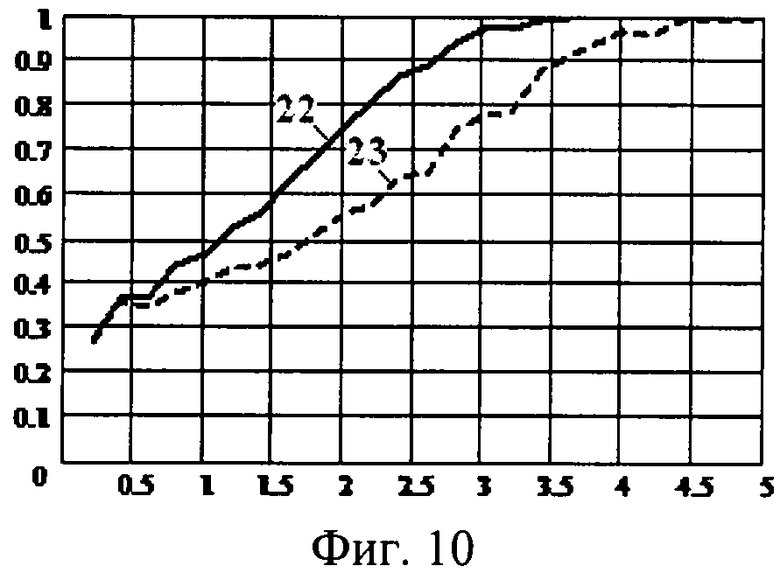
Полученная зависимость позволяет выбрать порог обнаружения UП1 для реализации соотношения (10) при заданном уровне шума. Зависимость вероятности правильного обнаружения от отношения сигнал/шум при фиксированном пороге (РЛТ=const) в виде  представлены на фигуре 10. Здесь кривая 22 соответствует РЛТ=10-2, а кривая 23 - РЛТ=4·10-2; Uc - амплитуда сигнала на входе канала.
представлены на фигуре 10. Здесь кривая 22 соответствует РЛТ=10-2, а кривая 23 - РЛТ=4·10-2; Uc - амплитуда сигнала на входе канала.
Как видно из рисунка, гарантированное обнаружение пеленга в предлагаемой схеме возможно при отношении сигнал/шум более пяти.
Зависимость относительной погрешности определения дальности определялась в виде:
Здесь R0 - истинное значение дальности,  - среднее значение дальности, найденное по результатам N опытов для каждого фиксированного отношения сигнал/шум на выходе.
- среднее значение дальности, найденное по результатам N опытов для каждого фиксированного отношения сигнал/шум на выходе.
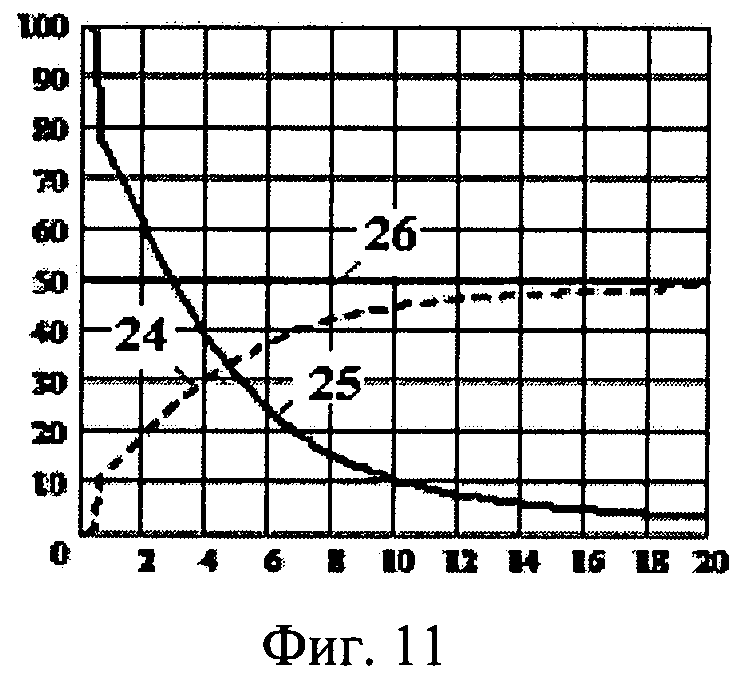
Эта зависимость представлена на фигуре 11, кривая 25.
На фигуре показана также зависимость измеренной дальности от отношения сигнал/шум, кривая 24. В этом случае вертикальная ось градуирована в метрах. Прямая 26 соответствует значению истинной дальности.
Как следует из фигуры 11, приемлемые значения относительной погрешности измерения дальности достигаются при отношении сигнал/шум более десяти.
Таким образом, результаты моделирования подтверждают работоспособность, эффективность и реализуемость предлагаемого пеленгатора.
Возможность практической реализации также следует из того, что схема может быть построена на типовых, известных и технологически отработанных элементах. Например:
Антенны 1.1, 1.2, 1.3 - направленные, могут быть выбраны различных типов, в зависимости от диапазона частот и тактико-технических требований к пеленгатору. В простейшем случае могут использоваться антенны типа вибратор-рефлектор, как в рассматриваемом примере по типу описанных в [Г.З. Айзенберг, В.Г. Ямпольский, О.Н. Терешин. Антенны УКВ. Ч 1. - М. «Связь», 1977], с.188, рисунок 13.40;
Приемные тракты 2.1, 2.2, 2.3 - могут быть построены по стандартной схеме радиосвязных или радиолокационных приемников с выходом на промежуточной частоте по типу описанной в [М.К. Белкин, В.Т. Белинский, Ю.Л. Мазор и др. Справочник по учебному проектированию приемоусилительных устройств. К., «Выща школа», 1988.] с.405, рисунок 14.4;
Фазовые детекторы 3.1, 3.2, 3.3 - могут быть реализованы в виде балансных фазовых детекторов, описанных в [М.К. Белкин, В.Т. Белинский, Ю.Л. Мазор и др. Справочник по учебному проектированию приемоусилительных устройств. К., «Выща школа», 1988] с.252, рисунок 9.31в;
Частотомер 4 - может быть реализован по схеме электронно-счетного частотомера по типу описанной в [В.П. Бобровский, В.И. Костенко, В.М. Михаленко и др. Справочник по схемотехнике для любителя. Под ред. В.П. Боровского. - К: Тэхника, 1989] с.388, рисунок 18.6;
Блок пересечения 5, блок объединения 6 - могут быть построены на базе сумматоров, вычитающих устройств и устройств вычисления модуля [Гордиенко В.И., Дубровский С.Е., Рюмшин Р.И., Фенев Д.В. Универсальный многофункциональный структурный элемент систем обработки информации. /Радиоэлектроника/ Изв. ВУЗов, №3, 1998]. Сумматоры и вычитающие устройства, на основе которых реализуется блок пересечения и объединения, могут быть выполнены по обычной схеме усилителей на два входа или с прямым и инверсным входами по типу описанных в [А.Г. Алексеенко. Применение прецезионных аналоговых интегральных микросхем. - М., Радио и связь 1981] с.77, рисунок 3.2. Устройства вычисления модуля могут быть реализованы по схеме двухполупериодного выпрямителя на операционных усилителях по типу приведенной в [В.П. Бобровский, В.И. Костенко, В.М. Михайленко и др. Справочник по схемотехнике для радиолюбителя. Под ред. В.П. Бобровского. - К: Тэхника, 1989] с.241, рисунок 12.4;
Блок определения пеленга 7 - логическое устройство, выполняющее операцию сравнения с пороговым напряжением, может быть реализовано с помощью компараторов, выполненных на базе операционных усилителей по схеме, описанной в [А.П. Голубков, А.Д. Далматов, А.П. Лукошкин и др. Проектирование радиолокационных приемных устройств. Под ред. М.А. Соколова. - М., Высш. шк., 1984] с.141, рисунок 1.36;
Блок определения дальности 8 - вычисляющее устройство, выполняющее простейшие математические преобразования, которые могут быть реализованы по схемам, описанным в [А.П. Голубков, А.Д. Далматов, А.П. Лукошкин и др. Проектирование радиолокационных приемных устройств. Под ред. М.А. Соколова. - М., Высш. шк., 1984] с.28-43 (рисунки 1.7., 1.10., 1.11., 1.35.);
Анализ известных технических решений в области принципов и устройств фазовой пеленгации показывает, что заявленное изобретение благодаря существенным признакам, определившим путь достижения технического результата, не следует для специалиста явным образом из известного уровня техники и соответствует требованию «изобретательского уровня».
Кроме того, заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявляемого изобретения. Определение из перечня аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволило выявить в заявляемом объекте существенные по отношению к техническому результату отличительные признаки, что позволяет считать заявленное изобретение удовлетворяющим критерию «изобретательская новизна».
| название | год | авторы | номер документа |
|---|---|---|---|
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2282872C1 |
| СПОСОБ СОВМЕСТНОГО МОНОИМПУЛЬСНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ПРИНИМАЕМОГО СИГНАЛА И ПЕЛЕНГА ИСТОЧНИКА ЭТОГО СИГНАЛА | 2012 |
|
RU2492500C1 |
| МОНОИМПУЛЬСНЫЙ ФАЗОВЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2364882C2 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450283C1 |
| Способ амплитудно-фазовой пеленгации системой с вращающимися антаннами | 2020 |
|
RU2750335C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С НАПРАВЛЕННОЙ АНТЕННОЙ | 2010 |
|
RU2444749C1 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565067C1 |
Изобретение может использоваться в радиоразведке, радиомониторинге, при поиске специальных электронных устройств перехвата информации для определения местоположения источника радиоизлучения (ИРИ). Достигаемый технический результат - определение направления на ИРИ и дальности на относительно небольших расстояниях. Указанный результат достигается за счет того, что фазовый пеленгатор содержит три антенны, три приемных тракта, три фазовых детектора, частотомер, блок пересечения, блок объединения, блок определения пеленга, блок определения дальности, соединенные определенным образом между собой. 11 ил.
Фазовый пеленгатор, содержащий первую и вторую антенны, разнесенные на определенное расстояние, первый и второй приемные тракты, связанные входами с первой и второй антеннами соответственно и первый фазовый детектор, связанный первым входом с выходом первого приемного тракта, а вторым входом с выходом второго приемного тракта, отличающийся тем, что в него введены третья антенна, третий приемный тракт, связанный входом с третьей антенной, второй фазовый детектор, связанный одним входом с выходом второго приемного тракта, а другим входом с выходом третьего приемного тракта, третий фазовый детектор, связанный одним входом с выходом первого приемного тракта, а другим входом с выходом третьего приемного тракта, частотомер, связанный входом с выходом второго приемного тракта, блок пересечения, связанный одним входом с выходом первого фазового детектора, а другим входом с выходом второго фазового детектора, блок объединения, связанный одним входом с выходом первого фазового детектора, а другим входом с выходом второго фазового детектора, блок определения пеленга, связанный одним входом с выходом блока пересечения, вторым входом с выходом блока объединения, а третьим входом с выходом третьего фазового детектора, блок определения дальности, связанный одним входом с выходом частотомера, вторым входом с выходом блока пересечения, третьим входом с выходом блока определения пеленга, а выходы блока определения пеленга и блока определения дальности являются выходами фазового пеленгатора.
| ЧЕРДЫНЦЕВ В.А | |||
| Радиотехнические системы | |||
| Минск, "Вышэйшая школа", 1988, рис.8.1, с.195 | |||
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2427853C1 |
| ФАЗОВЫЙ РАДИОПЕЛЕНГАТОР | 2009 |
|
RU2403582C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2010 |
|
RU2449306C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450283C1 |
| US 6791493 B1, 14.09.2004 | |||
| JP 2009300284 A, 24.12.2009 | |||
| WO 1998029756 A1, 09.07.1998 | |||
| US 6049307 A, 11.04.2000 | |||

