ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области технического обслуживания машины, например, двигателя, такого как авиационный двигатель. В частности, изобретение относится к способу и к системе анализа машины, например, к акустическому или вибрационному анализу, для выявления, распознавания или прогнозирования аномалий.
УРОВЕНЬ ТЕХНИКИ
Машина представляет собой механическую систему, действующую согласно ограничениям, которые могут вызывать разрушение ее компонентов. Таким образом, необходимо найти общий способ возможно более эффективного способа управления машиной, для выявления повреждений, распознавания этих повреждений среди множества повреждений, возможных для машины, а также для предсказания их возникновения.
Если машина, например, авиационный двигатель, вызывает неудобство, связанное с возникновением шума, можно, тем не менее, вообразить использование этого неудобства для осуществления диагностики или прогнозирования повреждений непроникающим способом. На самом деле, двигатели самолетов и вращающихся машин, как правило, могут демонстрировать повреждения, многие из которых могут быть обнаружены на слух.
Также, из публикации US 2007/0255563 Al известна система контроля турбореактивного двигателя самолета, согласно которой регистрируют акустические сигналы, исходящие из турбореактивного двигателя в ходе функционирования, с помощью двух микрофонов, расположенных под гондолой турбореактивного двигателя, и сопоставляют полученные сигналы с эталонными сигналами посредством голосового алгоритма распознавания. Также, среди полученных сигналов можно идентифицировать отраженные сигналы, характерные для состояния турбореактивного двигателя.
Аналогично, было спроектировано воплощение такого контроля при использовании не акустических сигналов, генерированных машиной, а вибрационных сигналов, проходящих через различные компоненты машины. В этом отношении, можно обратиться к патенту WO 2011/054867 Al.
В таких системах контроля используют базу данных, в которой регистрируются предельные характеристики среди сигналов, отвечающих за нормальное функционирование, и сигналов, отвечающих за аномальное функционирование. Точнее говоря, в базе данных хранится одна или нескольких пороговых величин для одного или нескольких индикаторов, вычисленных на основе сигналов, поданных датчиком, связанным с машиной, например, микрофоном, расположенным внутри машины. База данных может, в частности, получать сведения на стадии обучения, посредством статистического определения пороговых величин определенного количества индикаторов. Запрос базы данных, на основе индикаторов, вычисленных из сигнала, поданного датчиком, осуществляют в ходе стадии тестирования, для определения состояния нормального или аномального функционирования тестируемой машины.
Сложность в ходе стадии обучения состоит в том, что имеется мало данных, отвечающих за нормальное функционирование, но особенно за аномальное функционирование, что может быть недостаточным для реализации статистических данных. В этом случае, например, обучение осуществляется посредством испытательного стенда или машины в ходе разработки, конфигурация которой может подлежать замене. С помощью ограниченного количества данных об обучении, в частности с помощью еще достаточно низкого количества аномальных данных, граничные значения, оцененные статистически, не являются оптимальными, что ограничивает качество определения состояния функционирования на стадии тестирования.
Или, предполагается иметь высококачественную базу данных, удовлетворяющую выходу годного по надлежащему определению серьезных аномалий и выходу годного по ложному определению ограниченного числа аномалий.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение призвано решить эту проблему и предусматривает для этого способ анализа рабочего состояния машины, такой как авиационный двигатель, содержащий этап обучения, для предоставления сведений эталонной базе данных об одной или нескольких пороговых величин для одного или нескольких индикаторов, вычисленных на основе сигналов, поданных одним или несколькими датчиками, связанными с машиной, отличающийся тем, что этап обучения содержит следующие операции, выполняемые блоком компьютерной обработки:
- получение сигналов, характерных для нормального функционирования машины и сигналов, характерных для аномального функционирования машины
- для каждого из сигналов, характерных для нормального функционирования, вычисление по меньшей мере одного сигнала, называемого сигналом отклонения, путем выполнения математической операции, имеющей в качестве атрибутов сигнал, характерный для нормального функционирования, и один из сигналов, характерных для нормального или аномального функционирования, отличных от упомянутого сигнала, характерного для нормального функционирования;
- для каждого из сигналов отклонения, - вычисление индикатора;
- определение на основе индикаторов сигналов отклонения, пороговой величины индикатора, позволяющей различать сигналы отклонения, сформированные из сигнала, характерного для нормального функционирования, и другого сигнала, характерного для нормального функционирования от сигналов отклонения, сформированных из сигнала, характерного для нормального функционирования, и сигнала, характерного для аномального функционирования;
- регистрация пороговой величины индикатора в эталонной базе данных.
Определенные предпочтительные, но не ограничивающие аспекты этого способа следующие:
- он дополнительно включает в себя этап тестирования машины посредством сигнала, подаваемого датчиком, связанным с машиной, причем этап тестирования содержит следующие операции:
- формирование тестового сигнала за счет выполнения упомянутой математической операции с помощью, в качестве атрибутов, сигнала, подаваемого датчиком, и эталонного сигнала;
- вычисление индикатора тестового сигнала;
- сопоставление индикатора тестового сигнала с пороговой величиной индикатора, зарегистрированной в эталонной базе данных, для определения нормального или аномального состояния функционирования машины;
- сигналы, поданные датчиком, преобразуют в частотные сигналы перед вычислением сигналов отклонения;
- сигналы, поданные датчиком, дискретизируют в течение периода измерения, в ходе которого режим двигателя машины изменяется, сигналы, дискретизированные указанным образом, синхронизируют в зависимости от изменений режима двигателя в течение периода измерения, и дискретизированные синхронизированные сигналы преобразуют в частотные сигналы для получения частотных линий, упорядоченных согласно числу оборотов вала;
- упомянутый индикатор или индикаторы сигнала содержат один или несколько индикаторов среди статистического момента сигнала и энергии сигнала;
- вычисление индикатора сигнала осуществляют путем подсчета количества точек сигнала, вычтенных из сигнала, характерного для нормального функционирования, присутствующих за пределами огибающей упомянутого сигнала, характерного для нормального функционирования;
- вычисление индикатора сигнала осуществляют путем подсчета количества пиков среди n пиков сигнала, характерного для нормального функционирования, которые совпадают с одним пиком среди p пиков сигнала, вычтенного из упомянутого сигнала, характерного для нормального функционирования;
- этап обучения содержит вторичную стадию, в ходе которой формируют сигнал, характерный для нормального функционирования, путем объединения нескольких сигналов, характерных для нормального функционирования;
- датчик подает акустический сигнал или вибрационный сигнал.
Изобретение также относится к компьютерному программному продукту, содержащему кодовые команды для выполнения этапов способа, при исполнении упомянутой программы на компьютере. Кроме того, оно распространяется на систему анализа состояния функционирования машины, такой как двигатель летательного аппарата, содержащий модуль получения сигнала, подаваемого датчиком, связанным с машиной, и эталонную базу данных, в которой зарегистрированы одна или несколько пороговых величин для одного или нескольких индикаторов, вычисленных на основе сигналов, поданных датчиком, связанным с машиной, отличающаяся тем, что она дополнительно включает в себя:
- модуль вычисления сигналов отклонения, сконфигурированный для формирования, для каждого из сигналов, характерных для нормального функционирования, по меньшей мере одного сигнала, называемого сигналом отклонения, путем выполнения математической операции, имеющей в качестве атрибутов сигнал, характерный для нормального функционирования, и один из сигналов, характерных для нормального или аномального функционирования, отличных от упомянутого сигнала, характерного для нормального функционирования;
- модуль вычисления индикаторов, сконфигурированный для вычисления, для каждого из сигналов отклонения, индикатора;
- модуль определения пороговых величин индикаторов, сконфигурированный для определения, на основе индикаторов сигналов отклонения, пороговой величины индикатора, представляющую границу между нормальным и аномальным функционированием машины, причем упомянутая пороговая величина позволяет различать сигналы отклонения, сформированные из сигнала, характерного для нормального функционирования, и другого сигнала, характерного для нормального функционирования, от сигналов отклонения, сформированных из сигнала, характерного для нормального функционирования, и сигнала, характерного для аномального функционирования, и для регистрации пороговой величины индикатора в эталонной базе данных.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие аспекты, цели, преимущества и характеристики изобретения станут более ясными из прочтения следующего подробного описания его предпочтительных вариантов воплощения, приведенного в качестве не ограничивающего примера, и сделанного со ссылкой на прилагаемые чертежи, на которых:
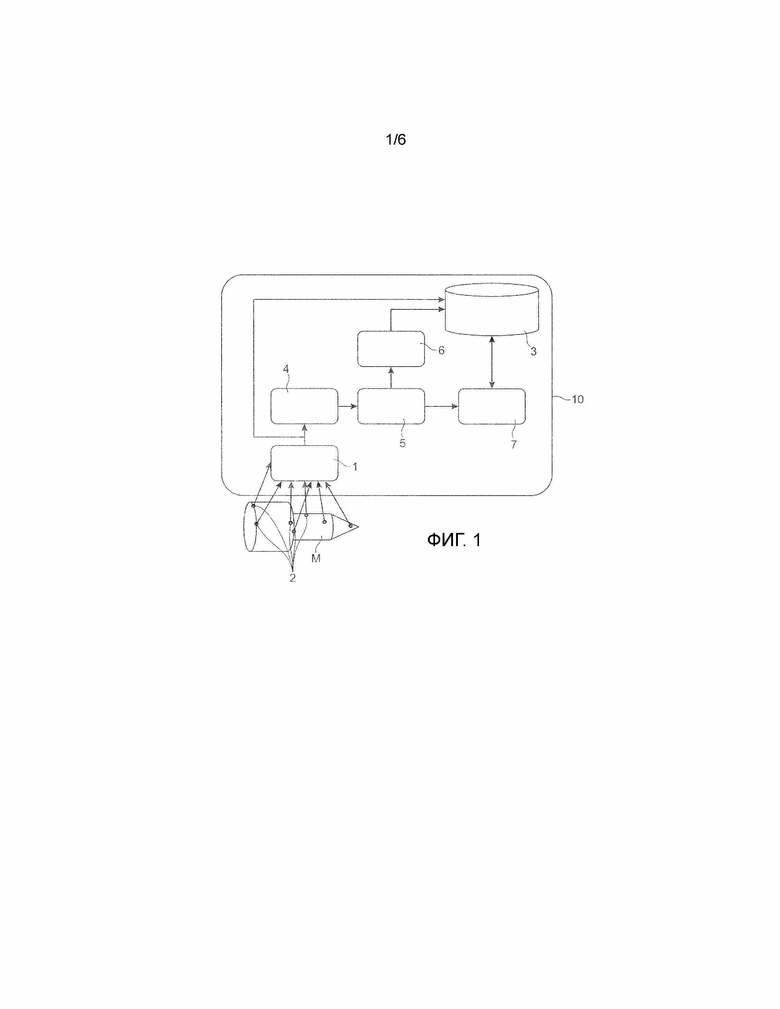
- Фигура 1 иллюстрирует пример аппаратных средств, реализованных в возможном варианте воплощения системы согласно изобретению;
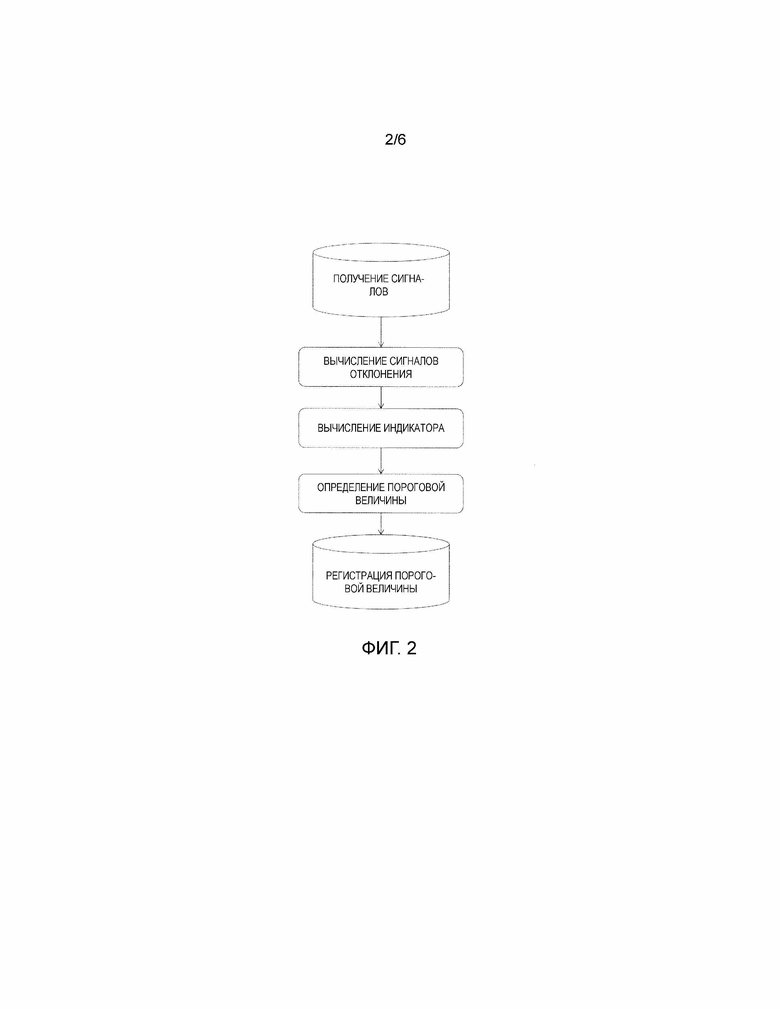
- Фигура 2 представляет различные операции, исполняемые на этапе обучения способа согласно изобретению;
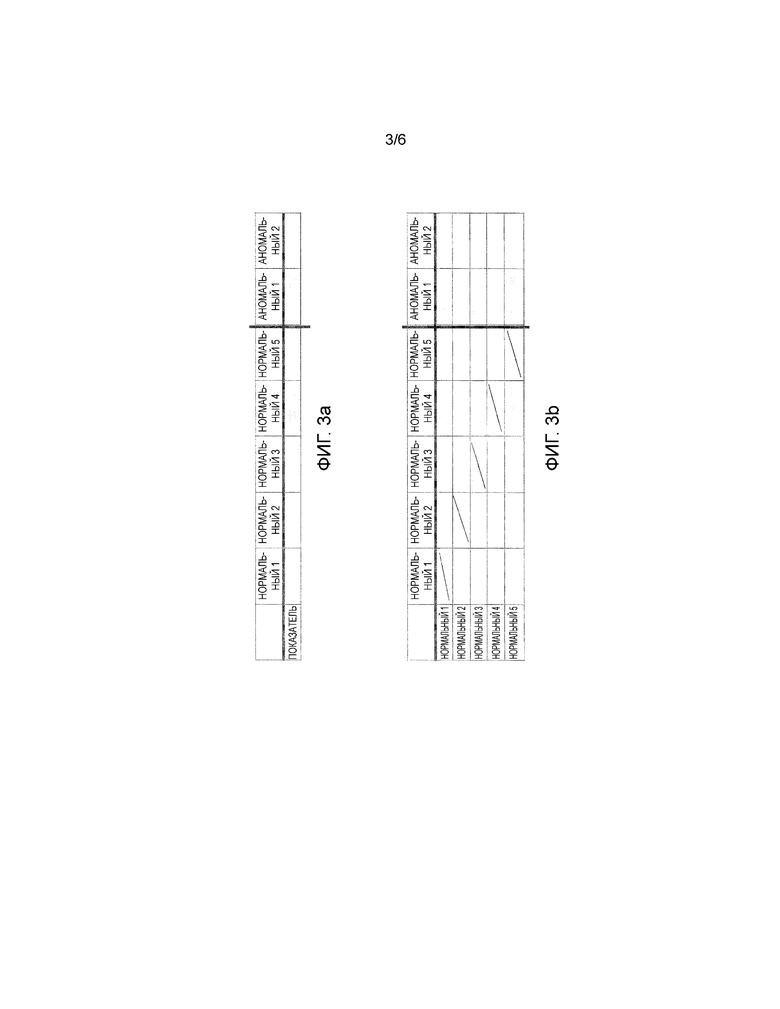
- Фигуры 3a и 3b иллюстрируют данные, имеющиеся в распоряжении для вычисления индикаторов согласно стандартному применению и согласно применению, пригодному для изобретения;
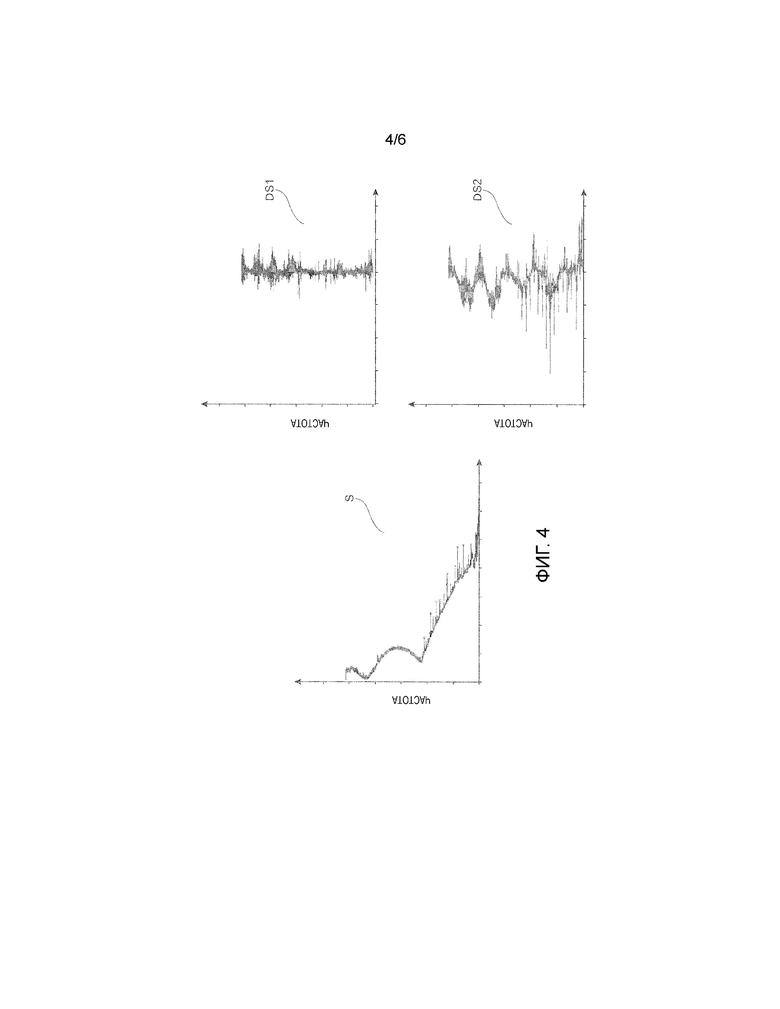
- Фигура 4 иллюстрирует спектр сигнала, характерного для нормального функционирования машины, и двух сигналов, полученных из вычитания упомянутого сигнала, характерного для нормального функционирования, соответственно, сигнала, отвечающего за нормальное функционирование, и сигнала, отвечающего за аномальное функционирование
- Фигуры 5a и 5b иллюстрируют вычисление примерного индикатора, который может быть реализован в рамках изобретения.
ПОДРОБНОЕ ОПИСАНИЕ КОНКРЕТНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Фигура 1 иллюстрирует пример аппаратных средств, реализованных в различных возможных вариантах воплощения системы и способ анализа состояния функционирования тестируемой машины M, пригодные для изобретения.
Тестируемая машина M может представлять собой двигатель воздушного или наземного транспортного средства, например, двигатель летательного аппарата, как схематически проиллюстрировано на Фигуре 1. Однако, изобретение не ограничено таким иллюстративным примером, а распространяется на общий способ исследования любой механической системы, производящей шум или вибрации.
По меньшей мере, один датчик 2 связан с машиной M. Речь идет, например, о микрофоне, расположенном в машине M, например, внутри гондолы двигателя летательного аппарата, т.е., непосредственно на внутренней поверхности гондолы, т.е., на двигателе. Речь также может идти о вибродатчике, таком как акселерометр или тензодатчик, расположенный предпочтительно на двигателе.
Является предпочтительным, чтобы было использовано несколько датчиков, например, десяток датчиков, что позволяет, в частности, распределить их между различными компонентами машины, например, между кожухом вентилятора, главным корпусом и конусом реактивного сопла двигателя летательного аппарата.
Датчик или датчики 2 идеально для контроля расположены вблизи компонентов машины. Однако, датчик не обязательно размещают на наблюдаемом компоненте, и можно, напротив, прибегнуть к наружному датчику, что представляет преимущество, позволяющее осуществлять контроль нескольких компонентов. В частности, можно разместить датчик вблизи одного из более важных компонентов, чтобы не препятствовать наблюдению за другими компонентами.
Система включает в себя блок 10 компьютерной обработки, снабженный модулем 1 получения по меньшей мере одного сигнала, подаваемого по меньшей мере одним датчиком 2, связанным с машиной M. Блок 10 компьютерной обработки включает в себя также эталонную 3 базу данных, в которой зарегистрирована одна или несколько пороговых величин для одного или нескольких индикаторов, вычисленных на основе сигналов, поданных по меньшей мере одним датчиком 2, связанным с машиной. На стадиии тестирования, факт превышения или его отсутствия одной или несколькими из этих пороговых величин одним или несколькими индикаторами, вычисленными на основе сигналов, соответствующих тестируемой машине, позволяет определить, нормально или аномально функционирует машина. В определенных вариантах воплощения изобретения, обнаружение аномалий сопровождается классификацией выявленных аномалий (например, между классом двигателей с поврежденной турбиной и другим классом двигателей с поврежденным компрессором).
Система и способ согласно изобретению позволяют более точно выявлять аномалии, исходя из акустических/вибрационных симптомов, при их оптимизации для функционирования с небольшим количеством данных обучения, составляющих эталонную базу данных.
Что касается Фигуры 2, этап обучения содержит следующие операции, исполняемые различными модулями 4, 5, 6 блока 10 компьютерной обработки. Этап обучения содержит, прежде всего, операцию получения «ACQ», посредством модуля 1 получения, представленного ранее, сигналов, характерных для нормального функционирования машины, и сигналов, характерных для аномального функционирования машины. Эти сигналы регистрируют в эталонной базе данных 3. Сигналы, характерные для нормального функционирования машины, например, получают в ходе первых полетов машины, когда ее компоненты имеют максимальную вероятность быть нормальными. Напротив, сигналы, характерные для аномального функционирования машины, принимаются посредством машины, о которой известно, например, в результате экспертизы, что она работает аномально.
Этап обучения содержит также, после, в случае необходимости, операции фильтрации и нормализации принятых сигналов, которая будет представлена ниже, операцию «SOUS» вычисления для каждого из сигналов, характерных для нормального функционирования, по меньшей мере одного сигнала, называемого сигналом отклонения, путем выполнения математической операции, имеющей, в качестве атрибутов, сигнал, характерный для нормального функционирования, и один из сигналов, характерных для нормального или аномального функционирования, отличных от упомянутого сигнала, характерного для нормального функционирования.
Эта операция «SOUS» выполняется модулем 4 вычисления сигналов отклонения. Математическая операция может быть выполнена для сигнала, характерного для нормального функционирования, и каждого из сигналов, характерных для нормального или аномального функционирования, отличного от упомянутого сигнала, характерного для нормального функционирования. В примере воплощения, который будет описан в дальнейшем описании, математическая операция представляет собой вычитание. Таким образом, операция «SOUS» для каждого из сигналов, характерных для нормального функционирования, состоит преимущественно в формировании сигналов отклоненияпутем вычитания из сигнала, характерного для нормального функционирования, каждого из сигналов, характерных для нормального или аномального функционирования, отличного от упомянутого сигнала, характерного для нормального функционирования.
В возможном варианте воплощения операция «SOUS» содержит также для каждого из сигналов, характерных для аномального функционирования, вычисление по меньшей мере одного сигнала, называемого сигналом отклонения, путем выполнения математической операции, имеющей в качестве атрибутов сигнал, характерный для аномального функционирования, и один из сигналов, характерных для аномального функционирования, отличных от упомянутого сигнала, характерного для аномального функционирования.
Вслед за операцией «SOUS», этап обучения содержит операцию «INDC-SOUS», выполнение посредством модуля 5 вычисления индикаторов состоит для каждого из сигналов отклонения в вычислении одного или нескольких индикаторов.
Эта операция «INDC-SOUS», следующая за операцией оценки пороговых величин повреждений «CAL-TSH», выполняется модулем 6 определения пороговых величин индикаторов, состоящей для каждого индикаторов сигналов отклонения в определении пороговой величины индикатора, представляющей границу между нормальным и аномальным функционированием машины. Пороговая величина позволяет отличать сигналы отклонения, сформированные из сигнала, характерного для нормального функционирования, и другого сигнала, характерного для нормального функционирования, от сигналов отклонения, сформированных из сигнала, характерного для нормального функционирования и сигнала, характерного для аномального функционирования.
В качестве примеров, операция «CAL-TSH» оценки пороговых величин повреждений может быть выполнена при вычислении пространственной медианы между первым и последним индикатором, или путем исключения нерегулярных точек, или с использованием машины с опорными векторами, или с сетью нейронов, или, кроме того, с деревом решений.
Этап обучения содержит дополнительно операцию «ENG», выполняемую модулем 6 определения пороговых величин индикаторов, состоящую также в регистрации одной или нескольких вычисленных таким образом пороговых величин в эталонной базе данных 3.
Фигуры 3a и 3b иллюстрируют участие в стадии обучения согласно изобретению в рамках примера, где по окончании операции получения «ACQ» пять сигналов, характерных для нормального функционирования, «Нормальный 1» - «Нормальный 5», и два сигнала, характерных для аномального функционирования, «Аномальный 1» и «Аномальный 2», регистрируют в базе данных 3.
Как представлено на Фигуре 3a, классический алгоритм присваивает показатель каждому сигналу (через вычисление индикатора, например, его дисперсию) и стремится отличить пять показателей нормальных сигналов от двух показателей аномальных сигналов для вычисления границы или пороговой величины между показателями нормальных и аномальных сигналов. Таким образом, во время стадии тестирования, для классификации неизвестного сигнала вычисляют показатель этого неизвестного сигнала и присваивают ему статус нормальный/аномальный, в зависимости от его положения по отношению к пороговой величине, определенной в ходе этапа обучения.
В рамках изобретения, и как представлено на Фигуре 3b, формируют пары сигналов, составленные идентичным образом: первый нормальный сигнал, и сравнительный нормальный или аномальный сигнал. В примере воплощения сравнительный сигнал вычитают из первого нормального сигнала для формирования сигнала отклонения. На этот раз, показатель присваивают каждой паре сигналов (сигнал отклонения) и стремятся отличить двадцать пар типа нормального сигнала, вычитаемого из первого нормального сигнала, от десяти пар типа аномального сигнала, вычитаемого из первого нормального сигнала. Следует отметить, что сигнал не сопоставляют с ним самим, откуда и количество из двадцати пар сигналов типа нормального сигнала, вычитаемого из первого нормального сигнала, и зачеркнутые не используемые ячейки в Таблице на Фигуре 3b. Изобретение также основано на идее умножения количества сигналов, на основе которых вычисляют индикаторы и определяют пороговые величины с помощью сигналов отклонения, более многочисленных, чем принятые сигналы. Также следует, например, сопоставлять принятые сигналы два на два и классифицировать эту разность, нежели классифицировать каждый из принятых сигналов по отдельности.
С помощью сигналов отклонения, полученных, например, при сопоставлении сигналов два с двумя, производят умножение количества сигналов, которые необходимо попытаться различить, для определения пороговой величины. Если еще раз обратиться к примеру, приведенному выше, вместо определения пороговой величины при попытке отличить пять нормальных сигналов от двух аномальных сигналов, будем определять пороговую величину, чтобы отличить двадцать сигналов отклонения, соответствующих двадцати парам типа нормального сигнала, вычитаемого из первого нормального сигнала, от десяти сигналов отклонения, соответствующих десяти парам типа аномального сигнала, вычитаемого из первого нормального сигнала. Благодаря такому увеличению количества доступных сигналов получаем более точное определение пороговой величины.
Разумеется, что сразу после завершения этапа обучения, можно осуществлять тестирование машины. Это тестирование осуществляют с помощью индикаторов, определенных идентично индикаторам, вычисленных на основе сигналов отклонения. Таким образом, этап тестирования машины M посредством сигнала, подаваемого датчиком, связанным с тестируемой машиной, содержит следующие операции:
- формирование модулем 4 вычисления сигналов отклонения тестового сигнала, созданного за счет предварительного выполнения упомянутой математической операции, например, вычитания, с помощью, в качестве атрибутов, сигнала, подаваемого датчиком, и эталонного сигнала, зарегистрированного в эталонной базе данных в ходе этапа обучения;
- вычисление модулем 5 вычисления индикаторов одного или нескольких индикаторов тестового сигнала;
- сопоставление модулем 7 обнаружения аномалий индикатора или индикаторов тестового сигнала с соответствующей пороговой величиной, зарегистрированной в эталонной базе данных, для определения нормального или аномального состояния функционирования тестируемой машины M.
Эталонный сигнал обычно представляет собой сигнал, характерный для нормального функционирования машины. Речь также может идти о сигнале, характерном для аномального функционирования машины, например, когда стремятся идентифицировать отметку о неисправности.
Эталонный сигнал, характерный для нормального (соответственно, аномального) функционирования может представлять собой один из сигналов, характерных для нормального (соответственно, аномального) функционирования, используемых в ходе стадии обучения, или представлять собой сигнал, создаваемый из одного и/или другого сигналов, характерных для нормального (соответственно, аномального) функционирования, используемых в ходе стадии обучения, как, например, средний из сигналов, характерных для нормального (соответственно, аномального) функционирования, используемого в ходе стадии обучения.
В рамках изобретения является предпочтительным, чтобы сигналы, поданные датчиком, были преобразованы в частотные сигналы перед генерированием сигналов отклонения и тестовых сигналов. Сопоставление сигналов между ними и вычисление одного или нескольких индикаторов также осуществляют в спектральной области. Также, на Фигуре 4 представлен спектр S эталонного сигнала, характерного для нормального функционирования машины, спектр ASI сигнала, соответствующего разности между эталонным сигналом и другим сигналом, отвечающим за нормальное функционирование машины, и спектр AS2 сигнала, соответствующего разности между эталонным сигналом и другим сигналом, отвечающим за аномальное функционирование машины.
В одном варианте воплощения этап обучения и этап тестирования содержат операцию фильтрования (шумоулавливания) и нормализации принятых сигналов выполняют соответственно перед формированием сигналов отклонения и перед формированием тестовых сигналов.
Это фильтрование может быть реализовано посредством фильтра Кальмана или частичного фильтра. В качестве альтернативы, он может принять форму преобразования Фурье, анализа по основным компонентам, преобразования по волнам малой амплитуды, или еще любого способа нормализации вибрационных сигналов.
В другом варианте воплощения это фильтрование принимает форму проецирования в область команд, что позволяет облегчить считывание спектрограмм, а именно, основных энергетических линий. Согласно этому варианту воплощения сигналы, поданные датчиком, дискретизируют в течение периода измерения, в ходе которого режим работы двигателя машины изменяется, сигналы, дискретизируемые указанным образом, синхронизируют в зависимости от изменений режима двигателя в течение периода измерения, и дискретизированные синхронизированные сигналы преобразуют в частотные сигналы для получения частотных линий, упорядоченных согласно режиму работы двигателя.
Более подробную информацию об этом проецировании в область команд можно найти в ранее упомянутом патенте WO 2011/054867 Al. Здесь следует отметить, что оно состоит в осуществлении измерения в изменяющемся режиме дискретизации измеренного сигнала при постоянной частоте, с последующей повторной дискретизацией при частоте, пропорциональной режиму работы. Для этого необходимо определить угловую кривую пробега, например, путем интегрирования кривой, представляющей изменение режима работы двигателя в зависимости от времени, с последующим проецированием сигнала, подаваемого датчиком, на угловую кривую пробега, с осуществлением новой дискретизации, которая состоит в выделении точек, отстоящих друг от друга на равное расстояние на угловой кривой пробега.
Описание, приведенное ниже, посвящено обработке сигналов отклонения и тестовых сигналов для вычисления одного или нескольких индикаторов этих сигналов. В общем виде, один или несколько индикаторов должны позволить сократить очень плотную информацию, содержащуюся в сигналах, с сохранением при этом достаточного количества сведений, позволяющих отличать нормальные сигналы от аномальных.
В качестве примеров индикаторов сигналов отклонения и тестовых сигналов, можно привести статистический момент этих сигналов, такой как дисперсия, асимметрия (сдвиг) или крутость, а также энергию этих сигналов. В любом случае, является предпочтительным, чтобы характеристики датчиков (динамические, полоса пропускания, и т.д.) соответствовали типу установленного индикатора.
Другой пример вычисления индикатора состоит в осуществлении подсчета количества точек сигнала, сопоставленного с сигналом, характерным для нормального функционирования, присутствующих за пределами огибающей упомянутого сигнала, характерного для нормального функционирования. Для этой цели, прочерчивают огибающую вокруг нормального сигнала (например, смещая фиксированное расстояние d к верху и к низу, или вычисляя его спектральную огибающую) и подсчитывают количество точек сравнительного сигнала, выходящих за эту огибающую.
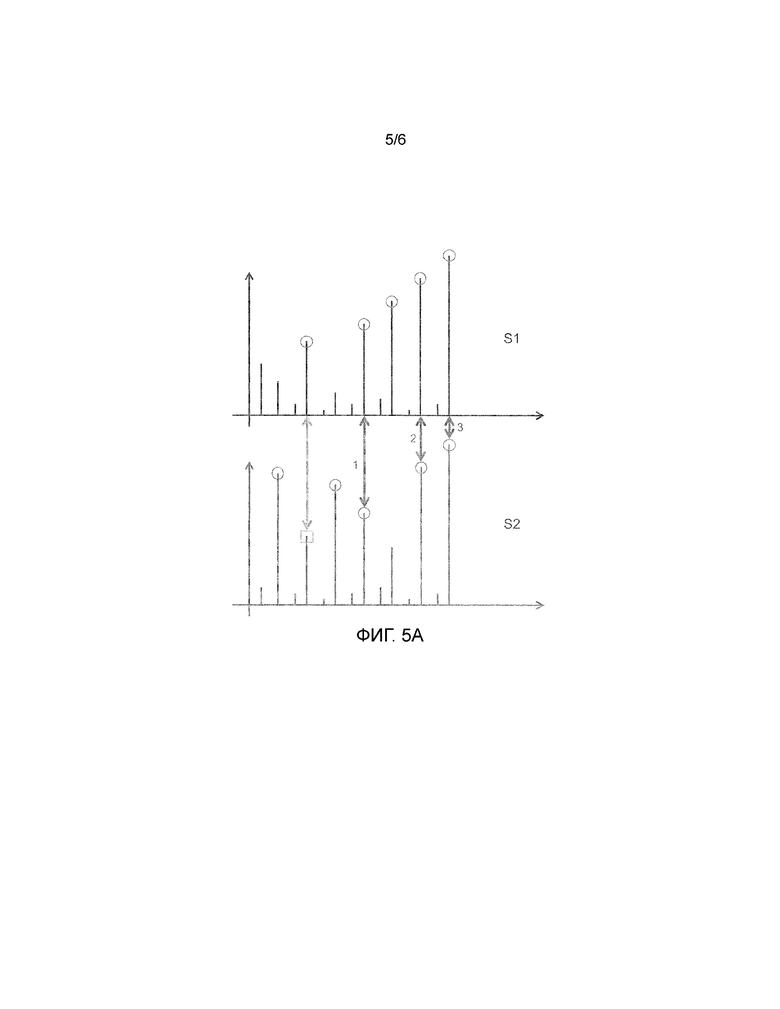
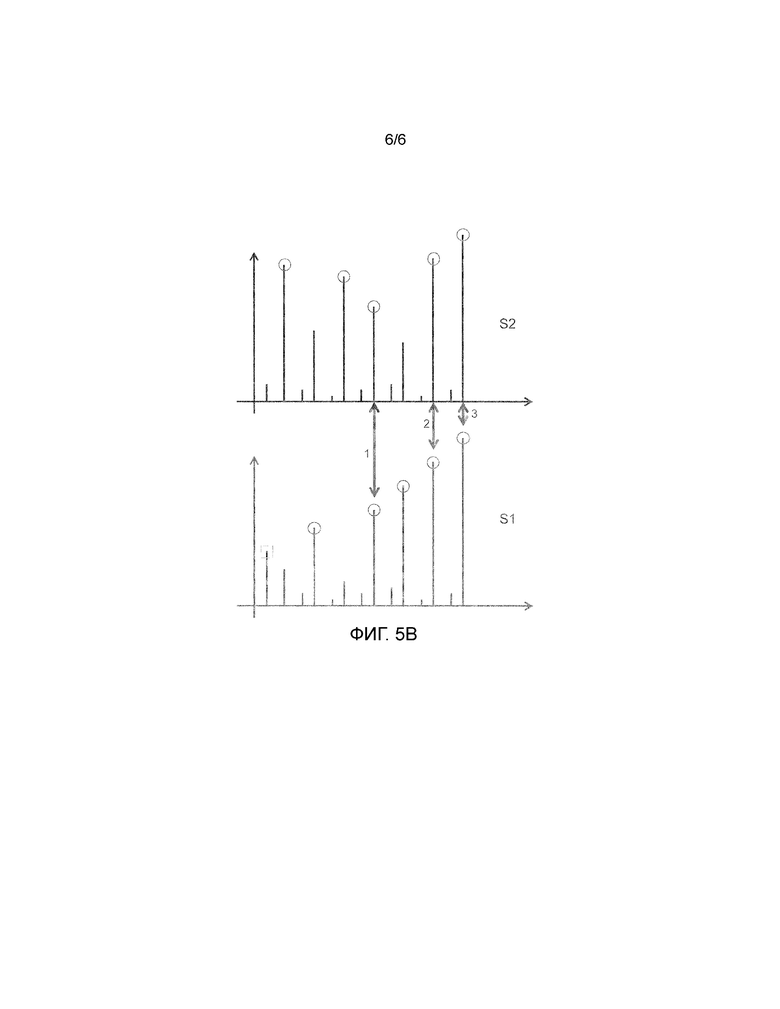
Другой пример вычисления индикатора состоит в осуществлении подсчета количества пиков среди n пиков сигнала, характерных для нормального функционирования, которые совпадают с одним пиком среди p пиков сигнала, сопоставляемого с упомянутым сигналом, характерным для нормального функционирования. Является предпочтительным, чтобы было оставлено n повышенных пиков нормального сигнала и p повышенных пиков сравнительного сигнала. В качестве альтернативы, можно оставить для пиков минимальные, что позволяет выявить не максимум энергии, а впадины. На практике, пики могут быть слегка смещены от одного сигнала к другому, и, таким образом, был разработан алгоритм, допускающий слабое смещение гребенки, т.е., ансамбля пиков.
Преимущественным образом, n и p выбирают различными, во избежание создания таблицы симметричных индикаторов, и, таким образом, во избежание сокращения количества данных, имеющихся в распоряжении на стадии обучения, для определения пороговой величины для индикатора, представляющей границу между нормальным и аномальным функционированием машины.
Также, на Фигуре 5a представлен случай, где сигнал если принят в качестве эталонного сигнала, с которым сопоставляют сигнал S2, а на Фигуре 5b представлен случай, где сигнал S2 принят в качестве эталонного сигнала, с которым сопоставляют сигнал S2.
Из Фигуры 5a следует, что при сопоставлении 5 повышенных пиков из каждого из сигналов S1 и S2, количество общих пиков равно трем. Зато, при сопоставлении 5 повышенных пиков из эталонного сигнала S1 и 6 повышенных пиков сравнительного сигнала S2, количество пиков суммарно, таким образом, будет равно четырем.
На Фигуре 5b, где для сравнительного сигнала принимают то же количество повышенных пиков, что и для эталонного сигнала, в двух случаях согласно Фигурам наблюдаются суммарно три пика на пять повышенных пиков эталонного сигнала.
Принимая n и p различными, получают различные показатели, в соответствии с сопоставлением S2 с S1 или S1 с S2. Это позволяет варьировать распределение показателей и, таким образом, улучшить описание пространства аномальных данных.
Другой пример индикатора может быть рассчитан непосредственно из принятых сигналов, на основе теории экстремальных значений. Для этого необходимо разделить спектр сигналов на множество небольших интервалов частот (например, на 400 интервалов). На каждом интервале, с помощью теории экстремальных значений моделируют распределение экстремумов амплитуд (максимум и минимум) ансамбля эталонных нормальных спектров. В хвосте двух распределений, соответственно, по ту и по эту сторону, фиксируют пороговую величину допуска, у которого точки тестируемого спектра должны рассматриваться как аномальные. В качестве индикатора принимают количество аномальных точек.
В одном варианте воплощения изобретения обнаружение аномалий, осуществляемое в ходе этапа тестирования машины, сопровождается классификацией выявленных аномалий (например, между классом с двигателями с поврежденной турбиной и другим классом двигателей с повреждённым компрессором). Для автоматизации этой классификации можно использовать несколько математических методов, а именно, дискриминантный анализ (где каждый класс аномалий моделируется теоремой Гаусса), методы разбиения данных (например, согласно средним величинам k), модели наблюдения с использованием машин опорных векторов (SVM, «Support Vector Mashines»), и т.д.
В одном варианте воплощения изобретения выделяют несколько стадий получения сведений из эталонной базы данных.
На одной первичной стадии, соответствующей, например, использованию испытательного стенда или разработке машины, в распоряжении имеется мало нормальных и аномальных данных обучения. Таким образом, база данных получает сведения за счет выполнения такого этапа обучения, какой был описан ранее.
На вторичной стадии, соответствующей, например, началу эксплуатации машины, в распоряжении имеется много данных, но мало аномальных данных. Таким образом, этап обучения может быть модифицирован для генерирования сигнала, характерного для нормального функционирования, путем объединения нескольких различных сигналов, характерных для нормального функционирования (например, средних или медианных эталонных нормальных сигналов). На самом деле, такая комбинация будет более характерной для нормального функционирования машины, чем изолированный нормальный сигнал. Таким образом, этап тестирования аналогичным образом модифицируют для вычисления индикатора сигнала, вплоть до вычитания из упомянутой комбинации сигнала, принятого от тестируемой машины.
На дальнейшей стадии, соответствующей, например, при полноценной эксплуатации машины, доступно множество данные обучения, как нормальных, так и аномальных, и более того, - для каждого типа возможных аномалий. На этой стадии можно стандартным образом присвоить показатель индикатора каждому сигналу (а парам сигналов - более не обязательно), поскольку данных теперь достаточно много. Данные классифицируют как нормальные или аномальные (а также тип аномалий) согласно показателю индикаторов.
Разумеется, изобретение не ограничено таким способом, какой был описан ранее, и, как должно быть понятно, оно распространяется также на системы, сконфигурированные для реализации данного способа, и в частности, на систему анализа состояния функционирования машины, такой как двигатель летательного аппарата, содержащую модуль получения сигнала, подаваемого датчиком, связанным с машиной, и эталонную базу данных, в которой зарегистрирована одна или несколько пороговых величин для одного или нескольких индикаторов, вычисленных на основе сигналов, поданных датчиком, связанным с машиной, отличающуюся тем, что она дополнительно включает в себя:
- модуль 4 вычисления сигналов отклонения, сконфигурированный для формирования, для каждого из сигналов, характерных для нормального функционирования, по меньшей мере одного сигнала, называемого сигналом отклонения, путем выполнения математической операции, имеющей в качестве атрибутов сигнал, характерный для нормального функционирования, и один из сигналов, характерных для нормального или аномального функционирования, отличных от упомянутого сигнала, характерного для нормального функционирования;
- модуль вычисления индикаторов, сконфигурированный для вычисления, для каждого из сигналов отклонения, индикатора;
- модуль определения пороговых величин индикаторов, сконфигурированный для определения на основе индикаторов сигналов отклонения, пороговой величины индикатора, представляющей границу между нормальным и аномальным функционированием машины, причем упомянутая пороговая величина позволяет различать сигналы отклонения, сформированные из сигнала, характерного для нормального функционирования, и другого сигнала, характерного для нормального функционирования от сигналов отклонения, сформированных из сигнала, характерного для нормального функционирования, и сигнала, характерного для аномального функционирования, и для регистрации пороговой величины индикатора в эталонной базе данных.
Кроме того, изобретение распространяется на логическое выполнение способа, а также на компьютерный программный продукт, содержащий кодовые команды для выполнения этапов способа согласно изобретению при исполнении упомянутой программы на компьютере.
| название | год | авторы | номер документа |
|---|---|---|---|
| Компьютерно-реализуемый способ мониторинга и обработки данных для распознавания и классификации аномалий в работе установок и оптимизации их технического обслуживания и система для выполнения данного способа | 2021 |
|
RU2829543C1 |
| Способ и система удаленного мониторинга и прогнозирования состояния технологических объектов | 2020 |
|
RU2739727C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ДИАГНОСТИРОВАНИЯ ПРОМЫШЛЕННОГО ОБЪЕКТА | 2018 |
|
RU2707423C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ И ИЗМЕРЕНИЯ АНОМАЛИЙ В СИГНАЛИЗАЦИИ, ИСХОДЯЩЕЙ ИЗ КОМПОНЕНТОВ, ИСПОЛЬЗУЕМЫХ В ПРОМЫШЛЕННЫХ ПРОЦЕССАХ | 2020 |
|
RU2784925C1 |
| СПОСОБ И СИСТЕМА УДАЛЁННОЙ ИДЕНТИФИКАЦИИ И ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ ЗАРОЖДАЮЩИХСЯ ДЕФЕКТОВ ОБЪЕКТОВ | 2018 |
|
RU2686257C1 |
| ОБНАРУЖЕНИЕ НЕШТАТНЫХ СИТУАЦИЙ | 2019 |
|
RU2766106C1 |
| Способ выявления аномалий в работе сети автоматизированной системы | 2020 |
|
RU2738460C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ДИАГНОСТИКИ ПРОМЫШЛЕННОГО ОБЪЕКТА НА ОСНОВЕ АНАЛИЗА АКУСТИЧЕСКИХ СИГНАЛОВ | 2020 |
|
RU2749640C1 |
| СПОСОБ И СИСТЕМА ДЛЯ АКУСТИЧЕСКОГО АНАЛИЗА МАШИНЫ | 2014 |
|
RU2669128C2 |
| Способ обнаружения аномальной работы сетевого сервера (варианты) | 2016 |
|
RU2630415C2 |
Группа изобретений относится к способу и системе анализа состояния функционирования машины, такой как двигатель летательного аппарата. Для анализа состояния производят обучение для предоставления сведений эталонной базе данных о данных пороговых величин, характеризующих функционирование машины, для чего получают сигналы, характерные для нормального функционирования машины, и сигналы, характерные для аномального функционирования машины, вычисляют сигнал отклонения, на основании которого вычисляют индикатор состояния и производят регистрацию порогового значения величины индикатора в эталонной базе данных. Система содержит модуль получения сигнала, подаваемого датчиком, связанным с машиной, эталонную базу данных, модуль вычисления сигналов отклонения, модуль вычисления индикаторов, модуль определения пороговых величин индикаторов, сконфигурированные определенным образом. Обеспечивается повышение качества определения состояния машины на этапе тестирования. 2 н. и 10 з.п. ф-лы, 7 ил.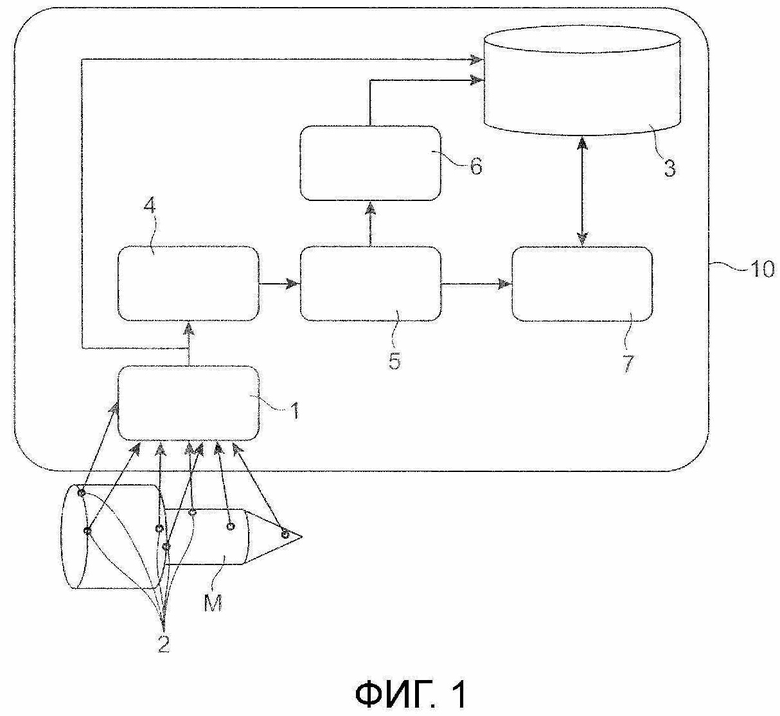
1. Способ анализа состояния функционирования машины (M), такой как двигатель летательного аппарата, содержащий этап обучения для предоставления сведений эталонной базе (3) данных об одной или нескольких пороговых величинах для одного или нескольких индикаторов, вычисленных на основе сигналов, поданных одним или несколькими датчиками (2), связанными с машиной, отличающийся тем, что этап обучения содержит следующие операции, исполняемые блоком (10) компьютерной обработки:
- получение (ACQ) сигналов, характерных для нормального функционирования машины, и сигналов, характерных для аномального функционирования машины;
- для каждого из сигналов, характерных для нормального функционирования, вычисление (SOUS) по меньшей мере одного сигнала, называемого сигналом отклонения, путем выполнения математической операции, имеющей в качестве атрибутов сигнал, характерный для нормального функционирования, и один из сигналов, характерных для нормального или аномального функционирования, отличных от упомянутого сигнала, характерного для нормального функционирования;
- для каждого из сигналов отклонения вычисление индикатора (INDC-SOUS);
- определение (CAL-TSH), на основе индикаторов сигналов отклонения, пороговой величины индикатора, позволяющей различать сигналы отклонения, сформированные из сигнала, характерного для нормального функционирования, и другого сигнала, характерного для нормального функционирования от сигналов отклонения, сформированных из сигнала, характерного для нормального функционирования, и сигнала, характерного для аномального функционирования;
- регистрация (ENG) пороговой величины индикатора в эталонной (3) базе данных.
2. Способ по п. 1, включающий в себя дополнительно этап тестирования машины посредством сигнала, подаваемого датчиком, связанным с машиной, причем этап тестирования содержит следующие операции:
- формирование тестового сигнала за счет выполнения упомянутой математической операции с помощью, в качестве атрибутов, сигнала, подаваемого датчиком, и эталонного сигнала;
- вычисление индикатора тестового сигнала;
- сопоставление индикатора тестового сигнала с пороговой величиной индикатора, зарегистрированной в эталонной базе данных, для определения нормального или аномального состояния функционирования машины.
3. Способ по любому из пп. 1 и 2, в котором сигналы, поданные датчиком, преобразуют в частотные сигналы перед вычислением сигналов отклонения.
4. Способ по п. 3, в котором сигналы, поданные датчиком, дискретизируют в течение периода измерения, в ходе которого режим двигателя машины изменяется, в котором дискретизированные сигналы синхронизируют в зависимости от изменений режима двигателя в течение периода измерения, и в котором дискретизированные синхронизированные сигналы преобразуют в частотные сигналы для получения частотных линий, упорядоченных согласно числу оборотов вала.
5. Способ по любому из пп. 1-4, в котором упомянутый индикатор или индикаторы сигнала содержат один или несколько индикаторов среди статистического момента сигнала и энергии сигнала.
6. Способ по любому из пп. 1-4, в котором вычисление индикатора сигнала осуществляют путем подсчета количества точек сигнала, вычтенных из сигнала, характерного для нормального функционирования, присутствующих за пределами огибающей упомянутого сигнала, характерного для нормального функционирования.
7. Способ по любому из пп. 1-4, в котором вычисление индикатора сигнала осуществляют путем подсчета количества пиков среди n пиков сигнала, характерного для нормального функционирования, которые совпадают с одним пиком среди p пиков сигнала, вычтенного из упомянутого сигнала, характерного для нормального функционирования.
8. Способ по любому из пп. 1-7, в котором этап обучения содержит вторичную стадию, в ходе которой формируют сигнал, характерный для нормального функционирования, путем объединения нескольких сигналов, характерных для нормального функционирования.
9. Способ по любому из пп. 1-8, в котором датчик (2) подает акустический сигнал или вибрационный сигнал.
10. Способ по любому из пп. 1-9, в котором вычисление (SOUS) по меньшей мере одного сигнала отклонения осуществляют за счет выполнения упомянутой математической операции между сигналом, характерным для нормального функционирования, и каждым из сигналов, характерных для нормального или аномального функционирования, отличных от упомянутого сигнала, характерного для нормального функционирования.
11. Способ по любому из пп. 1-10, в котором упомянутая математическая операция представляет собой вычитание.
12. Система анализа состояния функционирования машины (M), такой как двигатель летательного аппарата, содержащая модуль (1) получения сигнала, подаваемого датчиком, связанным с машиной, и эталонную базу данных (5), в которой зарегистрированы одна или несколько пороговых величин для одного или нескольких индикаторов, вычисленных на основе сигналов, поданных датчиком, связанным с машиной, отличающаяся тем, что она дополнительно включает в себя:
- модуль (4) вычисления сигналов отклонения, сконфигурированный для формирования, для каждого из сигналов, характерных для нормального функционирования, по меньшей мере одного сигнала, называемого сигналом отклонения, путем выполнения математической операции, имеющей в качестве атрибутов сигнал, характерный для нормального функционирования, и один из сигналов, характерных для нормального или аномального функционирования, отличных от упомянутого сигнала, характерного для нормального функционирования;
- модуль (5) вычисления индикаторов, сконфигурированный для вычисления, для каждого из сигналов отклонения, индикатора;
- модуль (6) определения пороговых величин индикаторов, сконфигурированный для определения, на основе индикаторов сигналов отклонения, пороговой величины индикатора, позволяющей различать сигналы отклонения, сформированные из сигнала, характерного для нормального функционирования, и другого сигнала, характерного для нормального функционирования, от сигналов отклонения, сформированных из сигнала, характерного для нормального функционирования, и сигнала, характерного для аномального функционирования, и для регистрации пороговой величины индикатора в эталонной (3) базе данных.
| СПОСОБ И СИСТЕМА КОНТРОЛЯ ВИБРАЦИОННЫХ ЯВЛЕНИЙ, ПОЯВЛЯЮЩИХСЯ В ГАЗОТУРБИННОМ ДВИГАТЕЛЕ ЛЕТАТЕЛЬНОГО АППАРАТА ВО ВРЕМЯ РАБОТЫ | 2010 |
|
RU2512610C2 |
| RU 2013126632 A, 20.12.2014 | |||
| US 20120290879 A1, 15.11.2012 | |||
| FR 2947335 A1, 31.12.2010 | |||
| WO 2007124586 A1, 08.11.2007. | |||

