УРОВЕНЬ ТЕХНИКИ
Светофоры служат для автоматического направления движения транспортных средств через перекрестки. Однако, когда светофоры работают неисправно, водители остаются без посторонней помощи для движения через перекрестки без каких-либо указаний, и без знаний как будут вести себя другие водители в то время как они движутся через перекресток. Светофоры могут неисправно работать вследствие перебоев питания или неисправности оборудования.
Несмотря на то, что водители типично приучены рассматривать такие перекрестки с неисправно работающими светофорами как четырехсторонний нерегулируемый перекресток, это не всегда может быть самым эффективным путем для направления движения транспорта. Однако, без обучения водителей новым правилам поведения и без способности транспортных средств обмениваться информацией друг с другом на дорожных перекрестках, никакой другой жизнеспособный процесс не был предложен для направления движения транспорта на перекрестке с неисправным светофором.
Отсюда следует, что это изобретение в целом относится к новому и уникальному решению для повышения эффективности направления движения транспорта на перекрестке, где неисправно работает соответствующий светофор(ы).
Сущность изобретения
Компоненты транспортного средства, а точнее, средство оптимизации движения транспорта, описанные в материалах настоящей заявки, специально выполнены с возможностью предоставлять техническое решение для реализации оптимизации потока движения транспорта посредством использования способности транспортных средств обмениваться информацией друг с другом, даже когда светофоры работают неисправно в области перекрестка.
Примерные варианты осуществления предусматривают транспортное средство, содержащее беспроводный интерфейс, выполненный с возможностью осуществлять связь с удаленным беспроводным интерфейсом, и контроллер. Контроллер может быть выполнен с возможностью осуществлять связь с беспроводным интерфейсом для передачи информации на удаленный беспроводный интерфейс и принимать информацию из удаленного беспроводного интерфейса. Контроллер дополнительно может быть выполнен с возможностью определять рабочее состояние для светофора в пределах области перекрестка в ответ на определение, что светофор работает неисправно, формировать схему оптимизации движения транспорта и управлять сообщением схемы оптимизации движения транспорта.
Примерные варианты осуществления также предусматривают способ для оптимизации потока движения транспорта на перекрестке. Способ может содержать прием информации о местоположении транспортного средства для транспортного средства, определение, что транспортное средство расположено в одной из множества зон перекрестка, определение состояния светофора на перекрестке, в ответ на определение, что светофор работает неисправно, формирование схемы оптимизации движения транспорта на основании информации о местоположении транспортного средства; и управление сообщением схемы оптимизации движения транспорта.
Эта заявка определена прилагаемой формулой изобретения. Описание обобщает аспекты вариантов осуществления изобретения и не должно использоваться для ограничения формулы изобретения. Другие реализации предполагаются в соответствии с технологиями, описанными в материалах настоящей заявки, как будет очевидно по изучению нижеследующих чертежей и описания, и такие реализации подразумеваются находящимися в пределах объема данного изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ради лучшего понимания, может быть сделана ссылка на варианты осуществления, показанные на следующих чертежах. Компоненты на чертежах не обязательно находятся в масштабе, и связанные элементы могут быть опущены, чтобы подчеркнуть и ясно проиллюстрировать новейшие признаки, описанные в материалах настоящей заявки. В дополнение, компоненты системы могут быть скомпонованы по-разному, как известно в данной области техники. На фигурах, идентичные ссылочные номера могут указывать ссылкой на одинаковые части на всем протяжении разных фигур, если не указано иное.
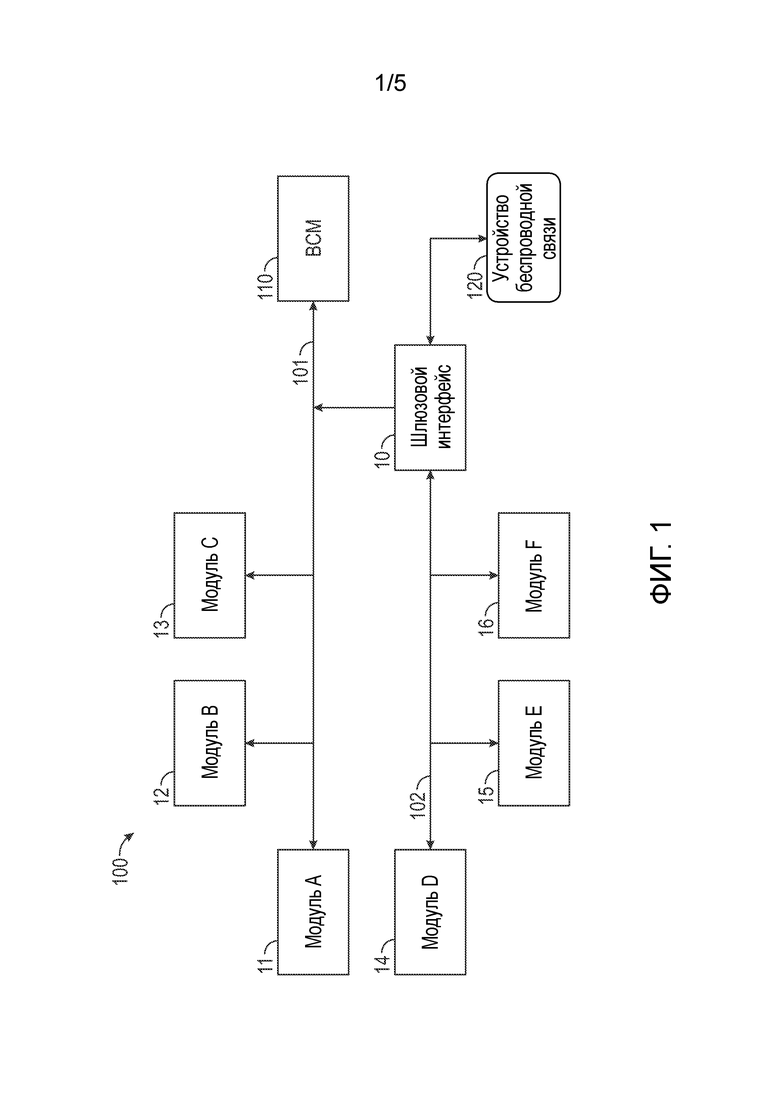
Фиг. 1 иллюстрирует примерную структурную схему системы транспортного средства, включающей в себя устройство беспроводной связи;
фиг. 2 иллюстрирует примерную область перекрестка, в том числе, транспортные средства и светофоры, согласно некоторым вариантам осуществления;
фиг. 3 иллюстрирует блок-схему последовательности операций способа, описывающую процесс, реализуемый средством оптимизации движения транспорта, согласно некоторым вариантам осуществления; и
фиг. 4 иллюстрирует карту перекрестка, идентифицирующую доступные шаблоны потока движения транспорта для транспортных средств в пределах примерной области перекрестка, проиллюстрированной на фиг. 3, согласно некоторым вариантам осуществления;
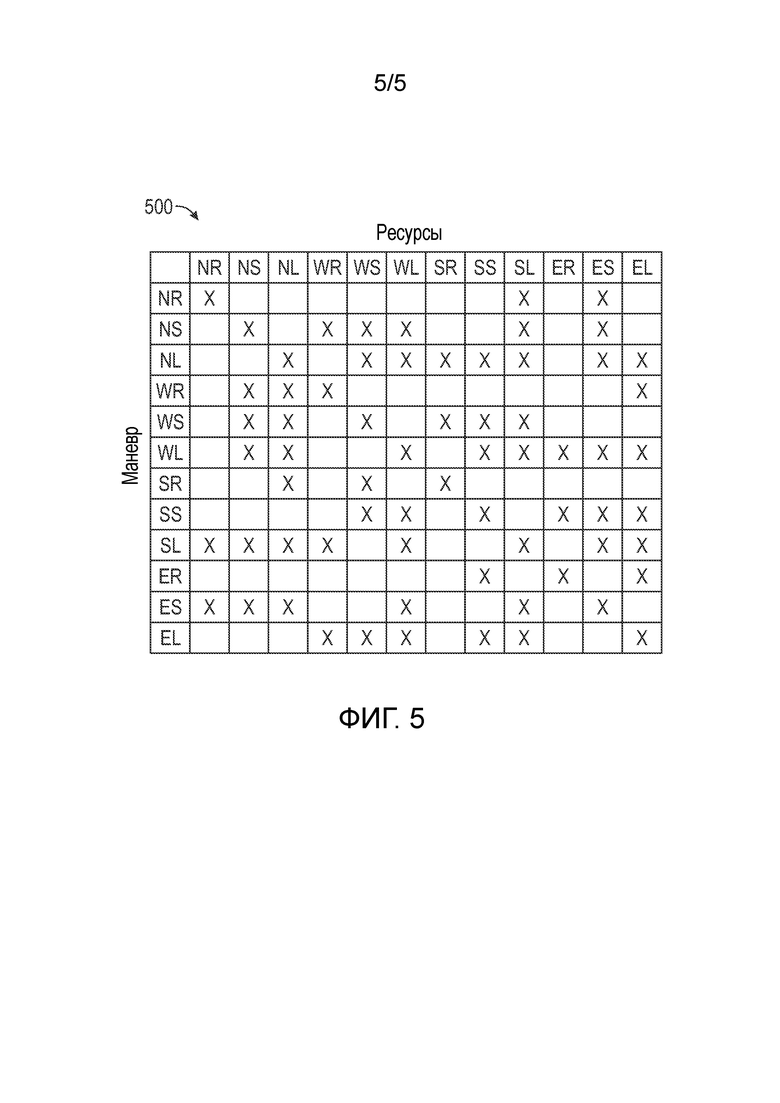
фиг. 5 иллюстрирует схему оптимизации, которая отображает желательные маневры транспортных средств по отношению к соответствующим ресурсам, которые требуются, чтобы предоставлять возможность для желательных маневров транспортных средств, согласно некоторым вариантам осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
На чертежах показаны и будут в дальнейшем описаны некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее раскрытие должно считаться иллюстративным примером и не подразумевается, что должно ограничивать признаки, описанные в материалах настоящей заявки, проиллюстрированными конкретными вариантами осуществления. Однако, могут требоваться не все из компонентов, описанных в этом раскрытии, и некоторые реализации могут включать в себя дополнительные, другие или меньшее количество компонентов относительно описанных в этом раскрытии в прямой форме. Изменения компоновки и типа компонентов могут быть произведены, не выходя из сущности или объема формулы изобретения, как изложено в материалах настоящей заявки.
Тогда как водители были приучены рассматривать перекрестки, имеющие неисправно работающий светофор, в качестве четырехстороннего перекрестка со знаками остановки, действие таким образом может быть неэффективным и вызывать ненужное прекращение движения транспорта на дороге. Отсюда следует, что это изобретение описывает систему, устройство, средство и/или способ для транспортного средства для оптимизации организации потока движения транспортных средств через перекресток, когда неисправно работает светофор на перекрестке. В дополнение к ситуациям, где светофор неисправно работает, оптимизация перекрестка, описанная выше, также может применяться к перекресткам, расположенным в сельской местности, с или без светофоров.
Оптимизация перекрестка, описанная в материалах настоящей заявки, делается возможной посредством технологии, которая предоставляет транспортным средствам возможность обмениваться информацией друг с другом на перекрестке. Например, система, устройство и способ для оптимизации потока движения транспорта на перекрестке, описанные в материалах настоящей заявки, вовлекают два или более транспортных средств, расположенных на перекрестке, которые должны быть оснащены оборудованием беспроводной связи для обмена информацией с другими транспортными средствами на перекрестке. Транспортное средство, оборудованное интерфейсом беспроводной связи, может быть выполнено с возможностью обмениваться информацией с другими транспортными средствами в пределах некоторой области, которые также оборудованы интерфейсом беспроводной связи. Такие транспортные средства могут обмениваться информацией беспроводным образом согласно известному протоколу связи, например, такому как протокол специализированной связи ближнего действия (DSRC) по известным стандартам, таким как IEEE 802.11p, IEEE 1609 и/или SAE J2735. Протокол DSRC работает в специальной полосе спектра 75 МГц вокруг 5,9 ГГц, выделенной Федеральной комиссией по связи (FCC) в США. Протокол DSRC может действовать в другой выделенной полосе в других странах. Например, протокол DSRC в Японии выполнен с возможностью работать в полосе спектра 900 МГц в Японии.
Нижеследующее изобретение предполагает, что транспортные средства осуществляют связь по протоколу DSRC. Однако, понятно, что транспортные средства включают в себя компоненты беспроводной связи, которые должны быть способны осуществлять связь по другим известным протоколам связи.
Связь по протоколу DSRC предоставляет возможность для обмена информацией между транспортными средствами (например, для связи между транспортными средствами «V2V») и также предоставляет возможность, чтобы транспортное средство обменивалось информацией с инфраструктурой (например, для связи между транспортным средством и инфраструктурой «V2I»). Отсюда следует, что наделенное возможностями связи транспортное средство. описанное в материалах настоящей заявки, выполнено с возможностью использовать беспроводную связь для выявления заслуживающих внимания ситуаций (например, выхода из строя светофора), так чтобы наделенное возможностями связи транспортное средство могло инициировать или участвовать в оптимизированном потоке движения транспорта на перекрестке, описанном в материалах настоящей заявки. с другими наделенными возможностями связи транспортными средствами.
Примерное транспортное средство, описанное в материалах настоящей заявки, является пассажирским транспортным средством, оборудованным специализированным вычислительным устройством, способным реализовывать признаки, описанные в материалах настоящей заявки. Например, специализированное вычислительное устройство может быть модулем управления кузовом (BCM), оборудованным в транспортном средстве, для обмена информацией с множеством модулей транспортного средства в пределах сети контроллеров (например, локальной сети контроллеров (CAN)). В частности, BCM может быть выполнен с возможностью осуществлять связь с интерфейсом беспроводной связи, включенным в ту же самую сеть контроллеров, для реализации оптимизированного потока движения транспорта на перекрестке, описанного в материалах настоящей заявки.
Фиг. 1 иллюстрирует примерную сеть 100 контроллеров транспортного средства. Сеть 100 контроллеров транспортного средства включает в себя шлюзовой интерфейс 10, модуль 110 управления кузовом (BCM) 110, модуль A 11, модуль B 12, модуль C 13, модуль D 14, модуль E 15 и модуль F 16. Компоненты, которые составляют сеть 100 контроллеров транспортного средства, проиллюстрированные на фиг. 1, могут быть соединены через первую шину 101 сети контроллеров и вторую шину 102 сети контроллеров. BCM 110 может быть вычислительным устройством, таким как электронный блок управления, выполненный с возможностью управлять одной или более систем транспортного средства, представленных различными модулями транспортного средства, проиллюстрированными на фиг. 1. BCM 110 дополнительно может включать в себя или быть выполненным с возможностью осуществлять связь с блоком памяти, таким как основная память и/или статическая память, для хранения цифровой информации, описанной в материалах настоящей заявки. Блок памяти может включать в себя твердотельную память, такую как карта памяти или другой узел, который вмещает одну или более энергонезависимых постоянных запоминающих устройств, таких как флэш-память. Кроме того, блок носителей может быть оперативным запоминающим устройством или другой энергозависимой перезаписываемой памятью. Дополнительно, блок носителей может включать в себя магнитооптический или оптический носитель, такой как диск или ленты, или другие запоминающие устройства, для фиксации информации, сообщенной через среду передачи.
Шлюзовой интерфейс 10 находится на связи с модулем D 14, модулем E 15 и модулем F 16 через вторую шину 102 сети контроллеров. Шлюзовой интерфейс 10 может включать в себя интерфейс разъема бортовой диагностики, выполненный с возможностью принимать соединение с устройством 120 беспроводной связи. Интерфейс разъема диагностики на шлюзовом интерфейсе 10 может соответствовать стандарту OBD II или другим известным стандартам диагностических соединений транспортного средства. Устройство 120 беспроводной связи может включать в себя сетевой интерфейс, такой как модем, для предоставления возможности беспроводной или проводной связи с другим устройством согласно протоколу DRSC или другому протоколу связи, такому как LTE, WiFi, Bluetooth, WiGig, GPS, GNSS, NFC или другой протокол связи. Устройство 120 беспроводной связи дополнительно может включать в себя свой собственный компьютер, содержащий специализированные процессор, память и другие компоненты для управления устройством 120 беспроводной связи, а также реализации защищенного от несанкционированного доступа признака обеспечения безопасности для предотвращения неавторизованного доступа к устройству 120 беспроводной связи.
Шлюзовой интерфейс 10 дополнительно находится на связи с модулем A, модулем B, модулем C и BCM 110 через первую шину 101 сети контроллеров. Каждый из примерных модулей транспортного средства, проиллюстрированных на фиг. 1, может представлять собой комбинацию одного или более из программного обеспечения, аппаратных средств и/или встроенных программ, соответствующих системам транспортного средства, таким как система электрических стеклоподъемников, навигационная система, развлекательная система, система регулирования температуры, система электрических замков, система сидений с электроприводом, система управления скоростью транспортного средства и другие системы транспортного средства, находящиеся в транспортном средстве. Каждый из примерных модулей транспортного средства может включать в себя датчики для считывания информации, связанной с их соответственной системой транспортного средства (например, информации о состоянии, идентифицирующей текущее состояние компонента в пределах соответственной системы транспортного средства). Например, система электрических стеклоподъемников может включать в себя датчик окна для считывания информации о состоянии положения окна, навигационная система может включать в себя датчики местоположения для идентификации информации о текущем положении транспортного средства, развлекательная система может включать в себя различные датчики для идентификации информации о состоянии для компонентов в пределах развлекательной системы (например, датчики уровня громкости для идентификации информации о текущем уровне громкости, информации о выводе развлекательной программы для идентификации текущего источника развлекательной программы, выдаваемой развлекательной системой), система регулирования температуры может включать в себя датчики температуры для считывания текущей температуры в кабине транспортного средства и/или наружной температуры, система электрических замков может включать в себя датчики замков для считывания информации о состоянии дверных замков, система сидений с электроприводом может включать в себя датчики положения сиденья для считывания информации о состоянии положения сиденья, и система управления скоростью транспортного средства может включать в себя датчик скорости для получения текущей скорости движения транспортного средства.
В частности, примерные модули транспортного средства, проиллюстрированные на фиг. 1, могут представлять собой комбинацию одного или более из программного обеспечения, аппаратных средств и/или зашитых программ, соответствующих модулю управления кузовом (BCM), модулю содействия парковке (PAM), модулю управления трансмиссией (TCM), модулю управления приемистостью (PCM), антиблокировочной тормозной системе (ABS), модулю управления рулевой колонкой (SCCM), модулю интерфейса протокола вспомогательного оборудования (SYNC) (APIM), модулю управления устройствами пассивной безопасности (RCM) и модулю рулевого управления с усилителем (PSCM). Модуль рулевого управления с усилителем может быть выполнен с возможностью управлять системой рулевого управления с электроусилителем (EPAS) транспортного средства. PCM может использоваться для управления силовой установкой транспортного средства по мере того, как оно проезжает через перекресток, ABS может использоваться для торможения транспортного средства по мере того, как оно проезжает через перекресток, PCSM может использоваться для управления направлением движения транспортного средства по мере того, как оно проезжает через перекресток, в соответствии с оптимизацией потока движения транспорта на перекрестке, описанной в материалах настоящей заявки.
Средство оптимизации движения транспорта может быть включено в состав для анализа состояния неисправной работы светофора и реализации оптимизации потока движения транспорта на перекрестке, описанной в материалах настоящей заявки. Средство оптимизации движения транспорта может быть программой или приложением, хранимыми в памяти, включенной в сеть 100 контроллеров транспортного средства, и выполняемыми процессором BCM 110. Средство оптимизации движения транспорта также может быть некоторой комбинацией программного обеспечения и аппаратных средств, заключенных в одном или более компонентов, которые составляют BCM 110. В качестве альтернативы, средство оптимизации движения транспорта может быть заключено в одном или более компонентов, которые содержат другой модуль транспортного средства в пределах сети 100 контроллеров транспортного средства. Дополнительное описание для средства оптимизации движения транспорта и компонентов сети 100 контроллеров транспортного средства, вовлеченных в выполнение средства оценки доступа, подробнее описано ниже. Следует понимать, что по меньшей мере одно, а предпочтительно большинство, если не все транспортные средства на перекрестке понимаются выполняющими средство оптимизации движения транспорта, описанное в материалах настоящей заявки. Таким образом, каждое транспортное средство, выполняющее средство оптимизации движения транспорта, будет способно приводить в исполнение одну и ту же стратегию оптимизации движения транспорта, чтобы проезжать через перекресток согласно одной и той же оптимизированной схеме шаблона потока движения транспорта, как описано подробнее на всем протяжении данного изобретения. Отсюда следует, что транспортные средства, выполняющие средство оптимизации движения транспорта, могут быть способны проезжать через перекресток, не нуждаясь в том, чтобы полагаться на центральный сервер управления (например, светофор или удаленный командный сервер). Даже если транспортное средство не выполняет средство оптимизации движения транспорта, до тех пор, пока транспортное средство имеет возможность принимать беспроводную информацию, оптимизированная схема шаблона потока движения транспорта, которая сформирована средством оптимизации движения транспорта, может передаваться на и приниматься транспортным средством.
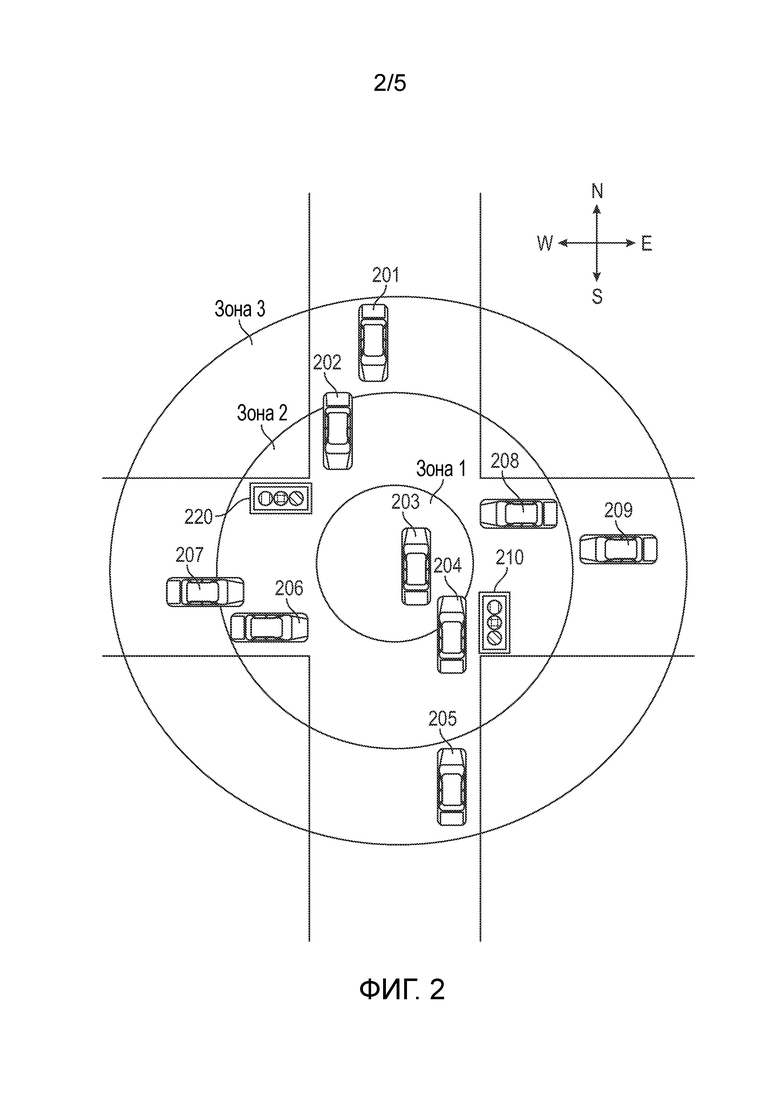
Фиг. 2 иллюстрирует примерную область перекрестка, где неисправно работает первый светофор 210 (то есть, светофор для северного и южного направлений) и второй светофор 220 (то есть, светофор для восточного и западного направлений). Фиг. 2 также иллюстрирует некоторое количество транспортных средств в пределах области перекрестка, в том числе, транспортные средства, движущиеся в южном направлении: транспортное средство 201 и транспортное средство 202; транспортные средства, движущиеся в северном направлении: транспортное средство 203, транспортное средство 204 и транспортное средство 205; транспортные средства, движущиеся в западном направлении: транспортное средство 206 и транспортное средство 207; и транспортные средства, движущиеся в восточном направлении: транспортное средство 208 и транспортное средство 209.
Область перекрестка может быть поделена на три зоны перекрестка: зону 1 (расположенную в пределах перекрестка), зону 2 (расположенную непосредственно снаружи зоны 1) и зону 3 (расположенную непосредственно снаружи зоны 2). Зона 1 выполнена с возможностью по существу или полностью определять фактическое пересечение между дорогами, которые содержат область перекрестка. Зона 2 выполнена с возможностью по существу или полностью определять часть дороги, где расположено следующее транспортное средство, для пересечения фактического перекрестка пересечения в области перекрестка. Зона этапе 3 выполнена с возможностью определять части области перекрестка вне зоны 2.
Количество зон перекрестка обеспечено только в целях примера, так как меньшее или большее количество зон перекрестка может быть включено в область перекрестка согласно другим окружающим условиям. К тому же, форма зон перекрестка может быть модифицирована в других вариантах осуществления. Например, одна или более из зон перекрестка могут быть прямоугольной или квадратной формы, тем временем, одна или более зон перекрестка могут быть круглой формы, проиллюстрированной на фиг. 2.
Транспортные средства в пределах области перекрестка могут быть на беспроводной связи друг с другом, например, согласно протоколу DSRC. Транспортные средства в пределах перекрестка также могут быть на связи с одним или более из первого светофора 210 или второго светофора 220. Транспортные средства в пределах области перекрестка также могут быть на связи с глобальной спутниковой системой определения местоположения (GPS) или глобальной навигационной спутниковой системой (GNSS) для определения, что транспортное средство находится в пределах области перекрестка, а точнее, для определения, в какой зоне оно расположено на данный момент. Транспортное средство дополнительно может использовать дополнительную информацию о местоположении транспортного средства, например, полученную системой технического зрения транспортного средства (например, системой поддержания полосы движения), использующей лазерный локатор (устройство оптического обнаружения и определения дальности объектов, LIDAR) системой радиолокационного зондирования, системой вычисления скорости вращения колес, и сигналы ускорения RCM. Дополнительные системы получения информации о положении транспортного средства могут находиться на борту транспортного средства и могут быть представлены модулем, проиллюстрированным на фиг. 1. Посредством использования информации со спутников и/или дополнительной информации о положении транспортного средства, транспортное средство может точно определять свое местоположение и окрестности по мере того, как оно проезжает через область перекрестка согласно оптимизации потока движения транспорта на перекрестке, описанной в материалах настоящей заявки. Транспортное средство также может принимать и анализировать информацию со спутников и/или информацию о положении транспортного средства с других находящихся поблизости транспортных средств в пределах области перекрестка, чтобы проходить область перекрестка согласно оптимизации потока движения транспорта на перекрестке, описанной в материалах настоящей заявки.
Фиг. 2 иллюстрирует, что транспортное средство 203 расположено полностью в зоне 1, транспортное средство 206 и транспортное средство 208 расположены полностью в зоне 2, и транспортное средство 201, транспортное средство 205 и транспортное средство 209 расположены полностью в зоне 3. Транспортные средства, которые частично расположены между разными зонами, могут быть сгруппированы в зону, где большая часть транспортного средства расположена в ней. Например, хотя транспортное средство 204 расположено между зоной 1 и зоной 2, транспортное средство 204 может быть сгруппировано в зону 2, так как большая часть транспортного средства 204 расположена в пределах зоны 2. Подобным образом, хотя транспортное средство 202 расположено между зоной 2 и зоной 3, транспортное средство 202 может быть сгруппировано в зону 2, так как большая часть транспортного средства 202 расположена в пределах зоны 2. Подобным образом, хотя транспортное средство 207 расположено между зоной 2 и зоной 3, транспортное средство 207 может быть сгруппировано в зону 3, так как большая часть транспортного средства 207 расположена в пределах зоны 3. Согласно некоторым вариантам осуществления, средство оптимизации движения транспорта, работающее на соответственном транспортном средстве в пределах зоны перекрестка, может определять свое расположение в зоне перекрестка на основании приема информации о местоположении из системы или сервера GPS/GNSS. Согласно некоторым вариантам осуществления, средство оптимизации движения транспорта, работающее на соответственном транспортном средстве в зоне перекрестка, может определять его расположение в зоне перекрестка на основании приема информации о назначениях местоположений с одного или более из светофора 210 и/или светофора 220, которые назначают транспортному средству соответствующую зону перекрестка.
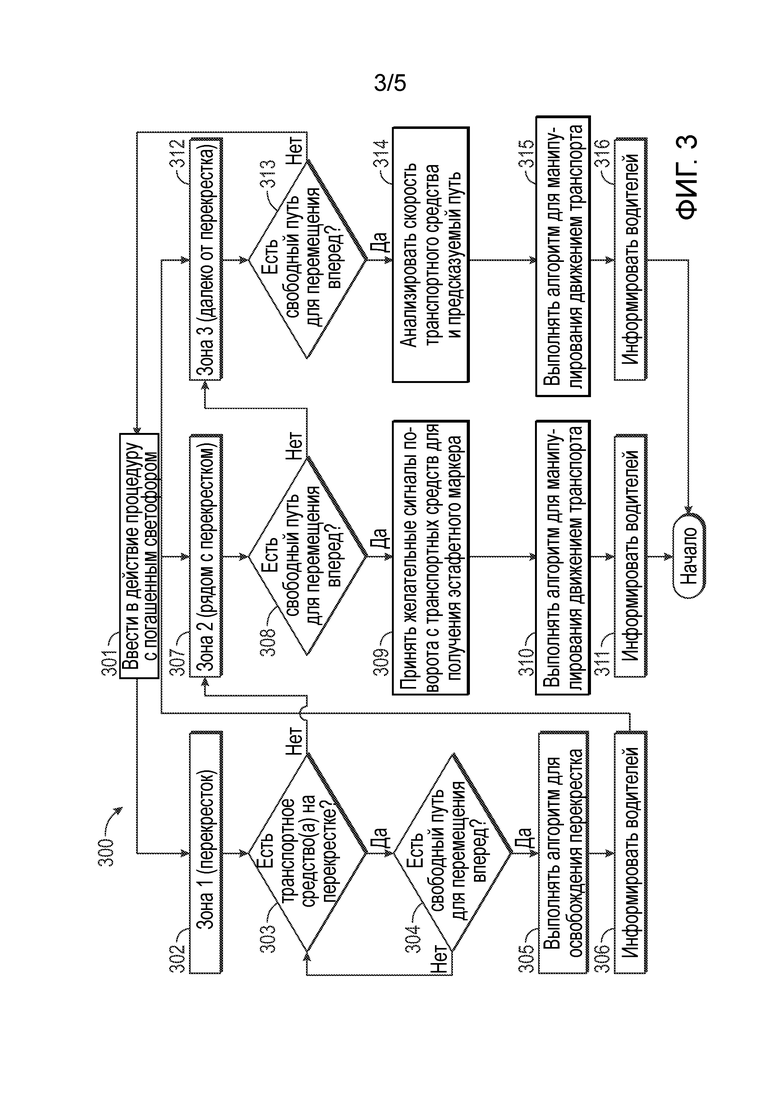
Фиг. 3 иллюстрирует блок-схему 300 последовательности операций способа, описывающую последовательность операций для реализации оптимизации потока движения транспорта на перекрестке средством оптимизации движения транспорта, например, выполняемую посредством BCM 110 транспортного средства. Блок-схема 300 последовательности операций способа приведена в целях примера в контексте области перекрестка, проиллюстрированной на фиг. 2. Согласно некоторым вариантам осуществления, средство оптимизации движения транспорта может реализовывать оптимизацию потока движения транспорта на перекрестке с эквивалентным средством(ами) оптимизации движения транспорта, работающим на одном или более транспортных средств и/или светофорах, расположенных в пределах области перекрестка.
Понятно, что по меньшей мере одно транспортное средство в области перекрестка должно быть оснащено возможностями беспроводной связи, чтобы быть готовым обмениваться информацией друг с другом в пределах области перекрестка согласно протоколу DSRC. Согласно некоторым вариантам осуществления, по меньшей мере одно транспортное средство в пределах области перекрестка понимается оборудованным беспроводными возможностями, чтобы быть готовым обмениваться информацией со светофором 210 или светофором 220 согласно протоколу DSRC. Согласно некоторым вариантам осуществления, по меньшей мере одно транспортное средство в пределах области перекрестка понимается оборудованным беспроводными возможностями, чтобы быть готовым обмениваться информацией с удаленным сервером, для того чтобы реализовывать оптимизацию потока движения транспорта на перекрестке, описанную последовательностью операций на блок-схеме 300 последовательности операций способа.
Оптимизация потока движения транспорта на перекрестке, описанная блок-схемой 300 последовательности операций способа, реализуется после определения, что один или более из светофора 210 и светофора 220 работают неисправно, по меньшей мере, в некоторой степени. Например, средство оптимизации движения транспорта, работающее на BCM 110, может определять, что один или более из светофора 210 и/или светофора 220, расположенных в области перекрестка, работают неисправно, когда оно принимает, через устройство 120 беспроводной связи, сообщение с другого транспортного средства в области перекрестка, идентифицирующее, что один или более из светофора 210 и/или светофора 220 работает неисправно. Когда средство оптимизации движения транспорта определяет, что один или более из светофора 210 и/или светофора 220 работают неисправно, средство оптимизации движения транспорта может отправлять команду управления на другие транспортные средства в области перекрестка, чтобы действовали по процедуре с выключенным светофором, идентифицированной на этапе 301.
В дополнение или в качестве альтернативы, средство оптимизации движения транспорта может определять, что один или более из светофора 210 и/или светофора 220, расположенных в пределах области перекрестка, работают неисправно, когда оно передает сигнал запроса состояния на один или более из светофора 210 и/или светофора 220 и не принимает обратно положительное сообщение о состоянии из одного или более из светофора 210 и/или светофора 220, указывающее, что он функционирует надлежащим образом. Когда средство оптимизации движения транспорта определяет, что один или более из светофора 210 и/или светофора 220 работают неисправно, средство оптимизации движения транспорта может отправлять команду управления на другие транспортные средства в области перекрестка, чтобы действовали по процедуре с выключенным светофором, идентифицированной на этапе 301.
В дополнение или в качестве альтернативы, средство оптимизации движения транспорта может определять, что один или более из светофора 210 и/или светофора 220, расположенных в пределах области перекрестка работают неисправно, когда оно передает сигнал запроса состояния на один или более из светофора 210 и/или светофора 220 и принимает обратно отрицательное сообщение о состоянии из одного или более из светофора 210 и/или светофора 220, указывающее, что он работает неисправно в некотором аспекте. Средство оптимизации движения транспорта может быть выполнено с возможностью передавать и принимать информацию (например, сигнал запроса состояния и сообщение о состоянии), управляя устройством 120 беспроводной связи для передачи и приема такой информации. Когда средство оптимизации движения транспорта определяет, что один или более из светофора 210 и/или светофора 220 работают неисправно, средство оптимизации движения транспорта может отправлять команду управления на другие транспортные средства в области перекрестка для действия по процедуре с выключенным светофором, идентифицированной на этапе 301.
В дополнение или в качестве альтернативы, пассажир в транспортном средстве может вводить сообщение о состоянии в средство оптимизации движения транспорта, запрашивающее состояние одного или более из светофора 210 и/или светофора 220 в области перекрестка. Запрос состояния может включать в себя информацию, указывающую, что пассажир полагает, что один или более из светофора 210 и/или светофора 220 работают неисправно. Сообщение о состоянии затем может побуждать средство оптимизации движения транспорта передавать запрос состояния на одно или более других транспортных средств в пределах области перекрестка согласно протоколу DSRC. По приему запроса состояния, соответственные другие транспортные средства могут представлять запрос своим пассажирам, побуждая их ввести свое мнение о том, полагают ли они, что один или более из светофора 210 и/или светофора 220 работают неисправно. Каждое мнение затем передается обратно на транспортное средство для анализа. Если предопределенное количество (например, большинство) принятых мнений указывают, что они полагают, что один или более из светофора 210 и/или светофора 220 работают неисправно, средство оптимизации движения транспорта может отправлять команду управления на другие транспортные средства в области перекрестка, чтобы действовали по процедуре с выключенным светофором, идентифицированной на этапе 301.
В контексте оговоренных условий, описанных выше, на этапе 301, процедура с выключенным светофором реализуется средством оптимизации движения транспорта, работающим на транспортном средстве в области перекрестка. Например, процедура с выключенным светофором может быть реализована на этапе 301 после того, как средство оптимизации движения транспорта определяет, что один или более из светофора 210 и/или светофора 220, расположенных в области перекрестка, работают неисправно.
После ввода в действие процедуры с выключенным светофором на этапе 301, на этапе 302, средство оптимизации движения транспорта выполнено с возможностью анализировать зону 1 в области перекрестка. Анализ зоны 1 включает в себя определение, на этапе 303, того, есть ли транспортное средство, расположенное на перекрестке, который содержит зону 1.
Если средство оптимизации движения транспорта определяет, что транспортное средство есть в пределах перекрестка, который содержит зону 1, то, на этапе 304, средство оптимизации движения транспорта продолжает определять, есть ли свободный путь, чтобы транспортное средство двигалось вперед через перекресток. Средство оптимизации движения транспорта может определять, что есть свободный путь вперед для транспортного средства на перекрестке, на основании информации о местоположении (например, информации о местоположении из GPS/GNSS) других транспортных средств в пределах области перекрестка, принятой посредством обмена информацией с другими транспортными средствами. Средство оптимизации движения транспорта также может определять, что есть свободный путь вперед для транспортного средства на перекрестке, на основании информации с датчика приближения (например, информации о близости, считанной датчиками приближения на транспортном средстве), собранной данным транспортным средством, выполняющим средство оптимизации движения транспорта, или принятой с других транспортных средств в пределах области перекрестка, которые собрали такую информацию с датчиков приближения из своих собственных бортовых датчиков приближения.
Если средство оптимизации движения транспорта определяет, что свободного пути вперед, чтобы транспортное средство на перекрестке двигалось вперед, нет, то средство оптимизации движения транспорта возвращается обратно на этап 303.
Если средство оптимизации движения транспорта определяет, что есть свободный путь вперед, чтобы транспортное средство на перекрестке двигалось вперед, то, на этапе 305, средство оптимизации движения транспорта выполняет предопределенный алгоритм оптимизации для освобождения перекрестка и дальнейшей координации движения транспорта. Алгоритм оптимизации будет описан подробнее, принимая во внимание доступную схему шаблона потока, проиллюстрированную на фиг. 4, и таблицу отображения ресурсов, проиллюстрированную на фиг. 5. Алгоритм оптимизации будет формировать оптимизированную схему шаблона потока движения транспорта для транспортных средств в области перекрестка на основании информации о местоположении транспортного средства. Оптимизированная схема шаблона потока движения транспорта может идентифицировать, каким транспортным средствам в области перекрестка предоставлена возможность двигаться через перекресток.
На этапе 306, оптимизированная схема шаблона потока движения транспорта передается на одно или более транспортных средств в пределах области перекрестка. Например, согласно некоторым вариантам осуществления, оптимизированная схема шаблона потока движения транспорта может передаваться на все транспортные средства в пределах области перекрестка транспортным средством, выполняющим средство оптимизации движения транспорта, которое формировало оптимизированную схему шаблона потока движения транспорта. Согласно некоторым вариантам осуществления, оптимизированная схема шаблона потока движения транспорта может передаваться на транспортные средства в пределах какой-нибудь комбинации из зоны 1, зоны 2 и зоны 3 транспортным средством, выполняющим средство оптимизации движения транспорта, которое формировало оптимизированную схему шаблона потока движения транспорта.
По приему оптимизированной схемы шаблона потока движения транспорта, средство оптимизации движения транспорта, работающее на транспортном средстве, принявшем оптимизированную схему шаблона потока движения транспорта, может представлять оптимизированную схему шаблона потока движения транспорта своему соответственному водителю. Оптимизированная схема шаблона потока движения транспорта может представляться с помощью визуального отображения (например, управлять устройством отображения транспортного средства, чтобы отображало оптимизированную схему шаблона потока движения транспорта) или звукового представления (например, управлять речевым выводом оптимизированной схемы шаблона потока движения транспорта). Оптимизированная схема шаблона потока движения транспорта может идентифицировать, предоставлено ли соответственному транспортному средству возможность двигаться через перекресток, и если так, в каком направлении ему предоставлена возможность двигаться через перекресток.
После определения, что транспортных средств на перекрестке нет, на этапе 303, или информирования водителей об оптимизированной схеме шаблона потока движения транспорта, на этапе 306, средство оптимизации движения транспорта переходит на этапе 307, где средство оптимизации движения транспорта выполнено с возможностью анализировать зону 2 в области перекрестка. Анализ зоны 2 включает в себя определение, на этапе 308, есть ли транспортное средство, расположенное на перекрестке, который содержит зону 2.
Если средство оптимизации движения транспорта определяет, что есть транспортное средство в пределах перекрестка, который содержит зону 2, но определяет, что нет свободного пути для движения вперед, на этапе 308, то средство оптимизации движения транспорта переходит на этап 312, чтобы анализировать зону 3. Средство оптимизации движения транспорта может определять, что есть свободный путь вперед для транспортного средства на перекрестке, на основании информации о местоположении (например, информации о местоположении из GPS/GNSS) других транспортных средств в пределах области перекрестка, принятой посредством обмена информацией с другими транспортными средствами. Средство оптимизации движения транспорта также может определять, что есть свободный путь вперед для транспортного средства на перекрестке, на основании информации с датчика приближения (например, информации о близости, считанной датчиками приближения на транспортном средстве), собранной данным транспортным средством, выполняющим средство оптимизации движения транспорта, или принятой с других транспортных средств в пределах области перекрестка, которые собрали такую информацию с датчиков приближения из своих собственных бортовых датчиков приближения.
Однако, если средство оптимизации движения транспорта определяет, что есть транспортное средство в пределах перекрестка, который содержит зону 2, и определяет, что есть свободный путь для движения вперед, на этапе 308, то на этапе 309 средство оптимизации движения транспорта может принимать информацию о сигналах поворота из одного или более транспортных средств в области перекрестка, которым предписано принимать эстафетный маркер согласно алгоритму оптимизации. Например, средство оптимизации движения транспорта может принимать информацию о сигналах поворота с транспортных средств в пределах зоны 2, где информация о сигналах поворота идентифицирует, введен ли в действие левый сигнал поворота или правый сигнал поворота на соответствующем транспортном средстве. В дополнение или в качестве альтернативы, средство оптимизации движения транспорта может принимать информацию, идентифицирующую, расположено ли транспортное средство в полосе движения для поворота (например, является ли полоса движения транспортного средства полосой движения только для левого поворота, только для правого поворота или только для движения прямо вперед). Расположение полосы движения для поворота транспортного средства может идентифицироваться на основании информации о местоположении из GPS/GNSS, идентифицирующей местоположение транспортного средства, или на основании идентификационной информации из самого транспортного средства, которая идентифицирует местоположение данной полосы движения для поворота применительно к транспортному средству, которая затем передается в средство оптимизации движения транспорта (то есть, передается на транспортное средство(а), выполняющее средство оптимизации движения транспорта).
После приема информации о сигналах поворота, затем, на этапе 310, средство оптимизации движения транспорта выполняет еще одну итерацию алгоритма оптимизации для формирования обновленной схемы шаблона потока движения транспорта для транспортных средств в области перекрестка на основании дополнительной информации о сигналах поворота. Оптимизированная схема шаблона потока движения транспорта может идентифицировать, каким транспортным средствам в области перекрестка предоставлена возможность двигаться через перекресток.
На этапе 311, оптимизированная схема шаблона потока движения транспорта передается на одно или более транспортных средств в пределах области перекрестка. Например, согласно некоторым вариантам осуществления, оптимизированная схема шаблона потока движения транспорта может передаваться на все транспортные средства в пределах области перекрестка транспортным средством, выполняющим средство оптимизации движения транспорта, которое формировало оптимизированную схему шаблона потока движения транспорта. Согласно некоторым вариантам осуществления, оптимизированная схема шаблона потока движения транспорта может передаваться на транспортные средства в пределах какой-нибудь комбинации из зоны 1, зоны 2 и зоны 3 транспортным средством, выполняющим средство оптимизации движения транспорта, которое формировало оптимизированную схему шаблона потока движения транспорта.
По приему оптимизированной схемы шаблона потока движения транспорта, средство оптимизации движения транспорта, работающее на транспортном средстве, принявшем оптимизированную схему шаблона потока движения транспорта, может представлять оптимизированную схему шаблона потока движения транспорта своему соответственному водителю. Оптимизированная схема шаблона потока движения транспорта может представляться с помощью визуального отображения (например, управлять устройством отображения транспортного средства, чтобы отображало оптимизированную схему шаблона потока движения транспорта) или звукового представления (например, управлять речевым выводом оптимизированной схемы шаблона потока движения транспорта). Оптимизированная схема шаблона потока движения транспорта может идентифицировать, предоставлено ли соответственному транспортному средству возможность двигаться через перекресток, и если так, в каком направлении ему предоставлена возможность двигаться через перекресток.
После определения, что нет свободного пути для движения вперед, на этапе 308, или информирования водителей об оптимизированной схеме шаблона потока движения транспорта на этапе 306, средство оптимизации движения транспорта переходит на этапе 312, где средство оптимизации движения транспорта выполнено с возможностью анализировать зону 3 в области перекрестка. Анализ зоны 3 включает в себя определение, на этапе 313, того, есть ли транспортное средство, расположенное на перекрестке, который содержит зону 3.
Если средство оптимизации движения транспорта определяет, что есть транспортное средство в пределах перекрестка, который содержит зону 3, но определяет, что нет свободного пути для движения вперед, на этапе 313, то средство оптимизации движения транспорта переходит на этап 301. Средство оптимизации движения транспорта может определять, что есть свободный путь вперед для транспортного средства на перекрестке, на основании информации о местоположении (например, информации о местоположении из GPS/GNSS) других транспортных средств в пределах области перекрестка, принятой посредством обмена информацией с другими транспортными средствами. Средство оптимизации движения транспорта также может определять, что есть свободный путь вперед для транспортного средства на перекрестке, на основании информации с датчика приближения (например, информации о близости, считанной датчиками приближения на транспортном средстве), собранной данным транспортным средством, выполняющим средство оптимизации движения транспорта, или принятой с других транспортных средств в пределах области перекрестка, которые собрали такую информацию с датчиков приближения из своих собственных бортовых датчиков приближения.
Однако, если средство оптимизации движения транспорта определяет, что есть транспортное средство в пределах перекрестка, который содержит зону 3, и определяет, что есть свободный путь для движения вперед, на этапе 313, то на этапе 314 средство оптимизации движения транспорта может принимать информацию о скорости транспортного средства на этапе 314 из одного или более транспортных средств в области перекрестка. Средство оптимизации движения транспорта дополнительно может анализировать принятую информацию о скорости транспортного средства для формирования предсказуемого пути для соответствующего транспортного средства на основании принятой информации о скорости транспортного средства.
После формирования предсказуемого пути, затем, на этапе 315, средство оптимизации движения транспорта выполняет еще одну итерацию алгоритма оптимизации для формирования обновленной схемы шаблона потока движения транспорта для транспортных средств в области перекрестка на основании дополнительной информации о скорости транспортного средства и предсказуемом пути. Оптимизированная схема шаблона потока движения транспорта может идентифицировать, каким транспортным средствам в области перекрестка предоставлена возможность двигаться через перекресток.
На этапе 316, оптимизированная схема шаблона потока движения транспорта сообщается на одно или более транспортных средств в пределах области перекрестка. Например, согласно некоторым вариантам осуществления, оптимизированная схема шаблона потока движения транспорта может передаваться на все транспортные средства в пределах области перекрестка транспортным средством, выполняющим средство оптимизации движения транспорта, которое формировало оптимизированную схему шаблона потока движения транспорта. Согласно некоторым вариантам осуществления, оптимизированная схема шаблона потока движения транспорта может передаваться на транспортные средства в пределах какой-нибудь комбинации из зоны 1, зоны 2 и зоны 3 транспортным средством, выполняющим средство оптимизации движения транспорта, которое формировало оптимизированную схему шаблона потока движения транспорта.
По приему оптимизированной схемы шаблона потока движения транспорта, средство оптимизации движения транспорта, работающее на транспортном средстве, принявшем оптимизированную схему шаблона потока движения транспорта, может представлять оптимизированную схему шаблона потока движения транспорта своему соответственному водителю. Оптимизированная схема шаблона потока движения транспорта может представляться с помощью визуального отображения (например, управлять устройством отображения транспортного средства, чтобы отображало оптимизированную схему шаблона потока движения транспорта) или звукового представления (например, управлять речевым выводом оптимизированной схемы шаблона потока движения транспорта). Оптимизированная схема шаблона потока движения транспорта может идентифицировать, предоставлена ли соответственному транспортному средству возможность двигаться через перекресток, и если так, в каком направлении ему предоставлена возможность двигаться через перекресток.
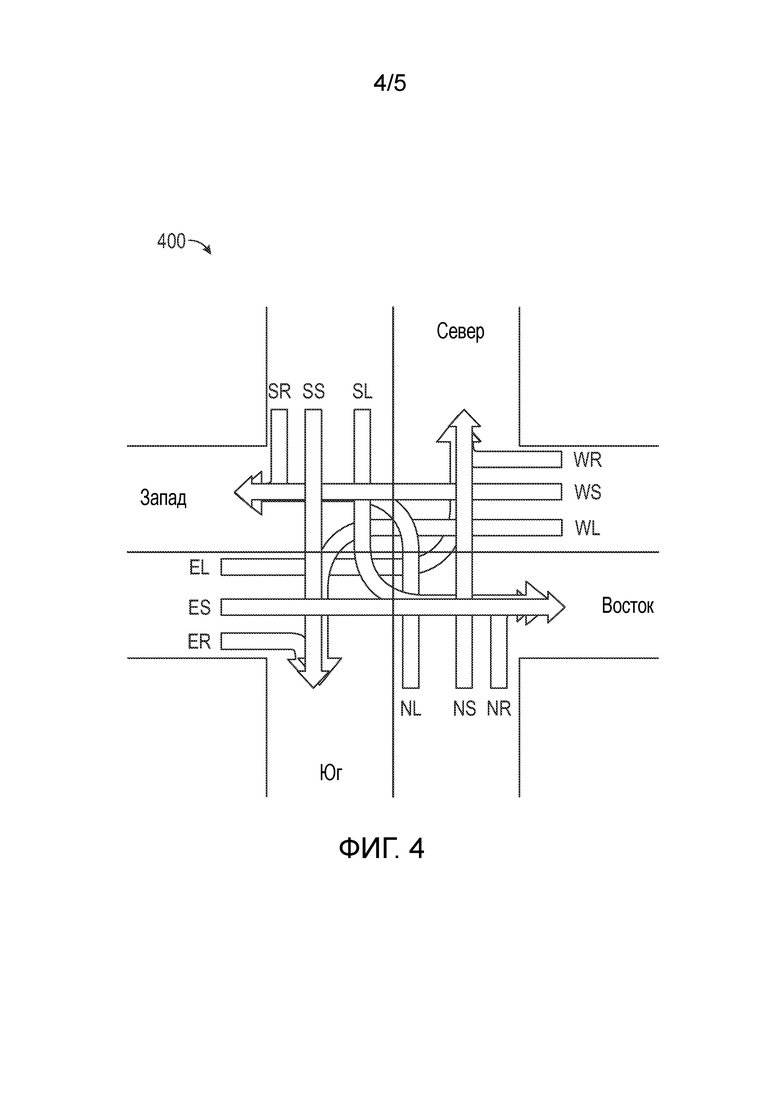
Фиг. 4 иллюстрирует карту 400 перекрестка, которая, например, может соответствовать области перекрестка, описанной в материалах настоящей заявки, принимая во внимание фиг. 2. Карта 400 перекрестка идентифицирует доступные маршруты движения для транспортных средств, которые прибывают в область перекрестка.
Например, в полосе движения в северном направлении, карта 400 перекрестка идентифицирует маршрут поворота налево с северного направления (NL), прямой маршрут в северном направлении (NS) и маршрут поворота направо с северного направления (NR). В полосе движения в южном направлении, карта 400 перекрестка идентифицирует маршрут поворота налево в южном направлении (SL), прямой маршрут в южном направлении (SS) и маршрут поворота направо с южного направления (SR). В полосе движения в восточном направлении, карта 400 перекрестка идентифицирует маршрут поворота налево с восточного направления (EL), прямой маршрут в восточном направлении (ES) и маршрут поворота направо с восточного направления (ER). В полосе движения в западном направлении, карта 400 перекрестка идентифицирует маршрут поворота налево с западного направления (WL), прямой маршрут в западном направлении (WS) и маршрут поворота направо с западного направления (WR).
Фиг. 5 иллюстрирует таблицу 500 оптимизации, которая, например, может содержать алгоритм оптимизации (например, алгоритм «пьющего философа»), описанный в материалах настоящей заявки, для определения оптимизированной схемы шаблона потока движения транспорта, также описанного в материалах настоящей заявки. Таблица 500 оптимизации графически представляет желательный маневр транспортного средства на перекрестке по отношению к ресурсам транспортного средства, где маневры транспортного средства соответствуют доступному маршруту движения, описанному на карте 400 перекрестка. Каждый желательный маневр требует набора ресурсов пред тем, как средство оптимизации движения транспорта предоставляет маневру возможность быть выполненным.
Например, если транспортное средство направляется на запад и желает выполнить левый поворот (то есть, WL), то транспортному средству будет необходимо получать конкретные ресурсы, как идентифицировано в таблице 500 оптимизации (например, NS, NL, WL, SS, SL, ER, ES и EL), перед тем, как средство оптимизации движения транспорта даст транспортному средству возможность выполнять маршрут левого поворота с западного направления (WL). Таким образом, средство оптимизации движения транспорта может выполнять алгоритм оптимизации, описанный в материалах настоящей заявки, обращаясь к таблице 500 оптимизации. Отсюда следует, что оптимизированная схема шаблона потока движения транспорта, сформированная средством оптимизации движения транспорта, может формироваться согласно желательному маневру и требуемым ресурсам, описанным в таблице 500 оптимизации.
Транспортное средство может получать свои ресурсы, дающие ему возможность пересекать перекресток, как изложено ниже. Когда предыдущее транспортное средство пересекает и покидает перекресток, предыдущее транспортное средство будет передавать сообщение на другие транспортные средства, что оно уступает свои эстафетные маркеры, которые давали ему возможность пересекать перекресток.
Так как каждое транспортное средство в пределах области перекрестка предпочтительно выполняет одно и то же средство оптимизации движения транспорта (то есть, один и тот же алгоритм оптимизации), средство оптимизации движения транспорта, работающее на других транспортных средствах на перекрестке, используется для определения, какое транспортное средство может резервировать пути, которые ему необходимо для прохождения через перекресток. Алгоритм оптимизации, описанный таблицей 500 оптимизации, делает это некоторым образом, который справедлив и избегает безвыходных положений.
Ни одно из транспортных средств, обменивающихся информацией в пределах области перекрестка согласно средству оптимизации движения транспорта, не является арбитром, все они равны. Алгоритм оптимизации, однако, является сбалансированным алгоритмом по той причине, что он не требует доверия другим транспортным средствам на перекрестке. Вот почему полезны принудительные меры. Простейшая принудительная мера может состоять в том, чтобы автоматизировать функцию вождения транспортного средства, в то время как транспортное средство движется через перекресток. Например, силовая установка и тормозная система транспортного средства могут работать совместно для управления приведением движения транспортного средства вперед, тем временем, также управляя нажатием тормозов транспортного средства, чтобы управлять проездом транспортного средства через перекресток. Посредством автоматизации проезда транспортного средства через перекресток в соответствии с правилом оптимизации, соблюдаемым всеми другими транспортными средствами на перекрестке, предотвращается «жульничество» водителей транспортного средства и проезд через перекресток вне очереди.
В дополнение или в качестве альтернативы, команды, идентифицирующие, когда транспортному средству предоставлена возможность проезжать через перекресток по его желательному пути, могут представляться водителю каждого транспортного средства, выполняющего средство оптимизации движения транспорта. Например, команды могут отображаться на устройстве отображения в каждой из кабин транспортных средств или выводиться на громкоговорителе в каждой из кабин транспортных средств. Это предоставляет водителям транспортных средств, выполняющих средство оптимизации, возможность следовать командам, которые отображаются, а потому, придерживаться алгоритма оптимизации средства оптимизации.
Любые описания последовательности операций или блоков схем на фигурах должны пониматься в качестве представляющих модули, сегменты или части кода, который включает в себя одну или более исполняемых команд, выполняемых вычислительным устройством, процессором или контроллером (например, блоком управления), для реализации конкретных логических функций или этапов в последовательности операций, и альтернативные реализации включены в объем вариантов осуществления, описанных в материалах настоящей заявки, в которых функции могут быть выполняться не в порядке того, что показано или обсуждено, в том числе, по существу одновременно или в обратном порядке, в зависимости от вовлеченных функциональных возможностей, как было бы понятно рядовым специалистам в данной области техники.
Должно быть подчеркнуто, что описанные выше варианты осуществления изложены всего лишь для ясного понимания принципов этого изобретения. Многие изменения и модификации могут быть произведены в отношении описанных выше вариантов(а) осуществления, по существу не отходя от сущности и принципов технологий, описанных в материалах настоящей заявки. Подразумевается, что все такие модификации должны быть включены в материалы настоящей заявки в объеме данного изобретения и защищены следующей формулой изобретения.
Группа изобретений относится к способу для оптимизации потока движения и к транспортному средству. Транспортное средство, осуществляющее способ, оборудовано интерфейсом беспроводной связи для связи с другими транспортными средствами в пределах области перекрестка. Посредством включения в состав оборудования беспроводной связи для осуществления связи с другими транспортными средствами в пределах области перекрестка, средство оптимизации движения транспорта, работающее на одном или более из транспортных средств, активируется посредством формирования схемы оптимизации движения, чтобы направлять движение транспорта через область перекрестка даже в случае, где неисправно работают один или более светофоров. Обеспечивается оптимизация движения транспортных средств при неисправно работающем светофоре. 2 н. и 18 з.п. ф-лы, 5 ил.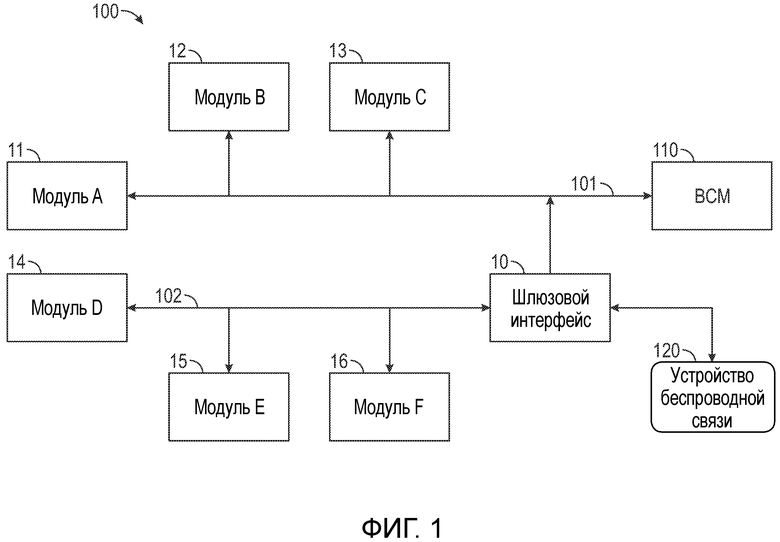
1. Транспортное средство, содержащее:
беспроводный интерфейс для осуществления связи с удаленным беспроводным интерфейсом; и
контроллер для:
идентификации местоположения транспортного средства;
определения, когда местоположение находится в пределах одной из множественных концентрических зон перекрестка, продолжающихся наружу от пересечения области перекрестка;
в ответ на определение, что светофор в пределах области перекрестка работает неисправно, формирования схемы оптимизации движения транспорта на основании местоположения, находящегося в пределах одной из зон; и
сообщения схемы оптимизации движения транспорта.
2. Транспортное средство по п. 1, в котором контроллер выполнен с возможностью управлять представлением схемы оптимизации движения транспорта, управляя беспроводным интерфейсом для передачи схемы оптимизации движения транспорта на удаленный беспроводный интерфейс.
3. Транспортное средство по п. 1, дополнительно содержащее устройство отображения;
при этом контроллер выполнен с возможностью управлять представлением схемы оптимизации движения транспорта, управляя устройством отображения для отображения схемы оптимизации движения транспорта.
4. Транспортное средство по п. 1, дополнительно содержащее громкоговоритель;
при этом контроллер выполнен с возможностью управлять представлением схемы оптимизации движения транспорта, управляя громкоговорителем для выдачи схемы оптимизации движения транспорта в слышимом формате.
5. Транспортное средство по п. 1, в котором контроллер дополнительно выполнен с возможностью:
принимать удаленное местоположение транспортного средства удаленного транспортного средства, которое включает в себя удаленный беспроводный интерфейс;
определять, когда удаленное местоположение транспортного средства находится в одной из множественных зон перекрестка; и
формировать схему оптимизации движения транспорта на основании, по меньшей мере частично, удаленного местоположения транспортного средства.
6. Транспортное средство по п. 1, при этом транспортное средство дополнительно содержит блок сигналов поворота;
при этом контроллер дополнительно выполнен с возможностью:
принимать информацию о сигналах поворота из блока сигналов поворота;
определять желательный маршрут движения для транспортного средства на основании информации о сигналах поворота; и
формировать схему оптимизации движения транспорта на основании, по меньшей мере частично, желательного маршрута движения.
7. Транспортное средство по п. 1, в котором контроллер дополнительно выполнен с возможностью:
принимать информацию об удаленных сигналах поворота с удаленного транспортного средства, включающего в себя удаленный беспроводный интерфейс, причем информация об удаленных сигналах поворота соответствует желательному маршруту движения транспорта удаленного транспортного средства; и
формировать схему оптимизации движения транспорта на основании, по меньшей мере частично, желательного маршрута движения удаленного транспортного средства.
8. Транспортное средство по п. 1, в котором контроллер дополнительно выполнен с возможностью:
определять желательный маршрут движения для транспортного средства;
определять, доступен ли набор требуемых ресурсов, соответствующих желательному маршруту движения транспорта; и
формировать схему оптимизации движения транспорта для указания, что транспортному средству предоставлена возможность движения по желательному маршруту движения, когда доступен набор требуемых ресурсов, соответствующих желательному маршруту движения.
9. Транспортное средство по п. 1, в котором множественные зоны перекрестка включают в себя первую зону перекрестка, вторую зону перекрестка и третью зону перекрестка, причем вторая зона перекрестка находится внутри третьей зоны перекрестка, первая зона перекрестка находится внутри второй зоны перекрестка и определяет пересечение.
10. Транспортное средство по п. 1, в котором беспроводный интерфейс выполнен с возможностью осуществлять связь с удаленным беспроводным интерфейсом согласно протоколу специализированной связи ближнего действия.
11. Транспортное средство по п. 8, в котором контроллер дополнительно выполнен с возможностью принимать эстафетный маркер, согласно алгоритму оптимизации, для проезда через перекресток в пределах области перекрестка.
12. Транспортное средство по п. 11, в котором контроллер должен автоматизировать функции приведения в движение силовой установки для проезда через перекресток в пределах области перекрестка.
13. Способ для оптимизации потока движения транспорта, содержащий этапы, на которых:
идентифицируют местоположение транспортного средства для транспортного средства;
определяют, когда местоположение транспортного средства находится в одной из множественных концентрических зон перекрестка, продолжающихся наружу от пересечения области перекрестка;
определяют состояние сигнала светофора области перекрестка;
в ответ на определение, что светофор работает неисправно, формируют схему оптимизации движения транспорта на основании местоположения транспортного средства в одной из множественных зон перекрестка; и
сообщают схему оптимизации движения транспорта.
14. Способ по п. 13, дополнительно содержащий этапы, на которых:
принимают удаленное местоположение удаленного транспортного средства;
определяют, когда удаленное местоположение находится в одной из зон перекрестка; и
формируют схему оптимизации движения транспорта на основании, по меньшей мере частично, удаленного местоположения.
15. Способ по п. 13, дополнительно содержащий этапы, на которых:
принимают информацию о сигналах поворота из блока сигналов поворота, соответствующего транспортному средству;
определяют желательный маршрут движения для транспортного средства на основании информации о сигналах поворота; и
формируют схему оптимизации движения транспорта на основании, по меньшей мере частично, желательного маршрута движения.
16. Способ по п. 13, дополнительно содержащий этапы, на которых:
принимают информацию об удаленных сигналах поворота с удаленного транспортного средства;
определяют желательный маршрут движения удаленного транспортного средства на основании информации об удаленных сигналах поворота; и
формируют схему оптимизации движения транспорта на основании, по меньшей мере частично, желательного маршрута движения удаленного транспортного средства.
17. Способ по п. 13, дополнительно содержащий этапы, на которых:
определяют желательный маршрут движения транспорта для транспортного средства;
определяют, доступен ли набор требуемых ресурсов, соответствующих желательному маршруту движения транспорта; и
формируют схему оптимизации движения транспорта, указывающую, что транспортному средству предоставлена возможность движения по желательному маршруту движения, когда доступен набор требуемых ресурсов, соответствующих желательному маршруту движения.
18. Способ по п. 13, в котором множественные зоны перекрестка включают в себя первую зону перекрестка, вторую зону перекрестка и третью зону перекрестка, причем вторая зона перекрестка находится внутри третьей зоны перекрестка, первая зона перекрестка находится внутри второй зоны перекрестка.
19. Способ по п. 13, дополнительно содержащий этап, на котором:
управляют беспроводным интерфейсом транспортного средства для передачи состояния транспортного средства на другой удаленный беспроводный интерфейс транспортного средства согласно протоколу специализированной связи ближнего действия.
20. Способ по п. 15, дополнительно содержащий этапы, на которых принимают эстафетный маркер, согласно алгоритму оптимизации, для проезда через перекресток в пределах области перекрестка.
| СПОСОБ КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2427924C1 |
| US 7085637 B2, 01.08.2006 | |||
| US 20080234920 A1, 25.09.2008 | |||
| US 20130116915 A1, 09.05.2013. | |||

