ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу и стратегии управления для управления транспортным средством, чтобы автоматически выезжать с места стоянки автомобилей.
УРОВЕНЬ ТЕХНИКИ
Автоматическая постановка на стоянку (автопарковка), также известная как активное содействие парковке, является системой автономного маневрирования транспортным средством, которая перемещает транспортное средство на (въезд на стоянку) или с (выезд со стоянки) места постановки на стоянку. Места постановки на стоянку могут относиться к числу параллельных, перпендикулярных или находящихся под углом мест постановки на стоянку. Система автопарковки нацеливается на улучшение удобства, ассоциативно связанного с вождением в ограниченных средах, где большие внимание и опыт требуются для рулевого управления транспортным средством. Маневры выезда на стоянку и выезда со стоянки успешно выполняются посредством скоординированного и автоматического управления углом поворота управляемых колес и скоростью. Более того, датчики и камеры могут обнаруживать объекты (такие как другие транспортные средства) во внешней среде; скоординированное и автоматическое управления транспортным средством может учитывать считанное присутствие или расположение этих объектов во время событий въезда на стоянку и выезда со стоянки, чтобы обеспечивать движение без столкновений в пределах имеющегося в распоряжении пространства.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Согласно варианту осуществления, предусмотрен компьютеризованный способ выезда транспортного средства с места стоянки автомобилей. Способ реализован одним или более контроллеров, с возможностью обмена информацией присоединенных к различным датчикам по всему транспортному средству, а также другим контроллерам, которые выдают команду и инициируют различные движения и действия в транспортном средстве. Способ, прежде всего, включает в себя выдачу указания водителю отпустить рулевое колесо. Как только был принят сигнал, указывающий, что рулевое колесо отпущено, способ включает в себя ограничение максимально допустимой скорости транспортного средства на основании расстояния между транспортным средством и внешним объектом. Способ затем включает в себя автоматическое управление углом поворота рулевого колеса и автоматическое ускорение с места стоянки автомобилей. По мере того, как автомобиль ускоряется с места стоянки автомобилей, способ включает в себя постепенное повышение максимально допустимой скорости на основании увеличения расстояния.
Согласно еще одному варианту осуществления, транспортное средство содержит множество обнаруживающих объекты датчиков, выполненных с возможностью обнаруживать расположение внешних объектов, таких как другие транспортные средства спереди и сзади параллельного места стоянки автомобилей. По меньшей мере один контроллер запрограммирован, в ответ на ввод в действие оператором рабочего режима, выполненного с возможностью автоматически содействовать транспортному средству при выезде с параллельного места постановки на стоянку, ограничивать действующую скорость транспортного средства на основании расстояния между транспортным средством и внешними объектами.
Еще одно примерное транспортное средство содержит множество датчиков, выполненных с возможностью считывать расположение первого объекта спереди транспортного средства и второго объекта сзади транспортного средства, в то время как транспортное средство поставлено на стоянку на параллельном месте постановки на стоянку между первым и вторым объектами. По меньшей мере один контроллер, присоединенный к датчикам и запрограммированный уменьшать ограничение по допустимому ускорению транспортного средства по мере того, как транспортное средство выезжает с параллельного места постановки на стоянку.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - схематическое изображение схемы управления для управления транспортным средством согласно одному из вариантов осуществления.
Фиг. 2 - вид сверху в плане транспортного средства, позиционирующего себя при подготовке к выезду с параллельного места стоянки автомобилей на основании расположения внешних объектов, согласно одному из вариантов осуществления.
Фиг. 3 - вид сверху в плане транспортного средства во время выезда с параллельного места стоянки автомобилей на основании расположения внешних объектов.
Фиг. 4 - показательная блок-схема последовательности операций инициирования рабочего режима содействия выезду со стоянки (POA) на основании входного сигнала от оператора транспортного средства согласно одному из вариантов осуществления.
Фиг. 5 - показательная блок-схема последовательности операций рабочего режима POA, в котором транспортное средство автоматически выезжает с места стоянки автомобилей, согласно одному из вариантов осуществления.
Фиг. 6 - схема системы рулевого управления с усилителем и автоматическим управлением согласно одному из вариантов осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения описаны в материалах настоящей заявки. Должно быть понятно, однако, что раскрытые варианты осуществления являются всего лишь примерами, и другие варианты осуществления могут принимать различные и альтернативные формы. Фигуры не обязательно должны определять масштаб; некоторые признаки могли быть преувеличены или сведены к минимуму, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения вариантов осуществления. Как будут понимать рядовые специалисты в данной области техники, различные признаки, проиллюстрированные и описанные со ссылкой на любую одну из фигур, могут комбинироваться с признаками, проиллюстрированными на одной или более других фигур, для создания вариантов осуществления, которые не проиллюстрированы и не описаны явно. Проиллюстрированные комбинации признаков дают характерные варианты осуществления для типичных применений. Различные комбинации и модификации признаков, совместимых с идеями этого изобретения, однако, могли бы требоваться для конкретных применений или реализаций.
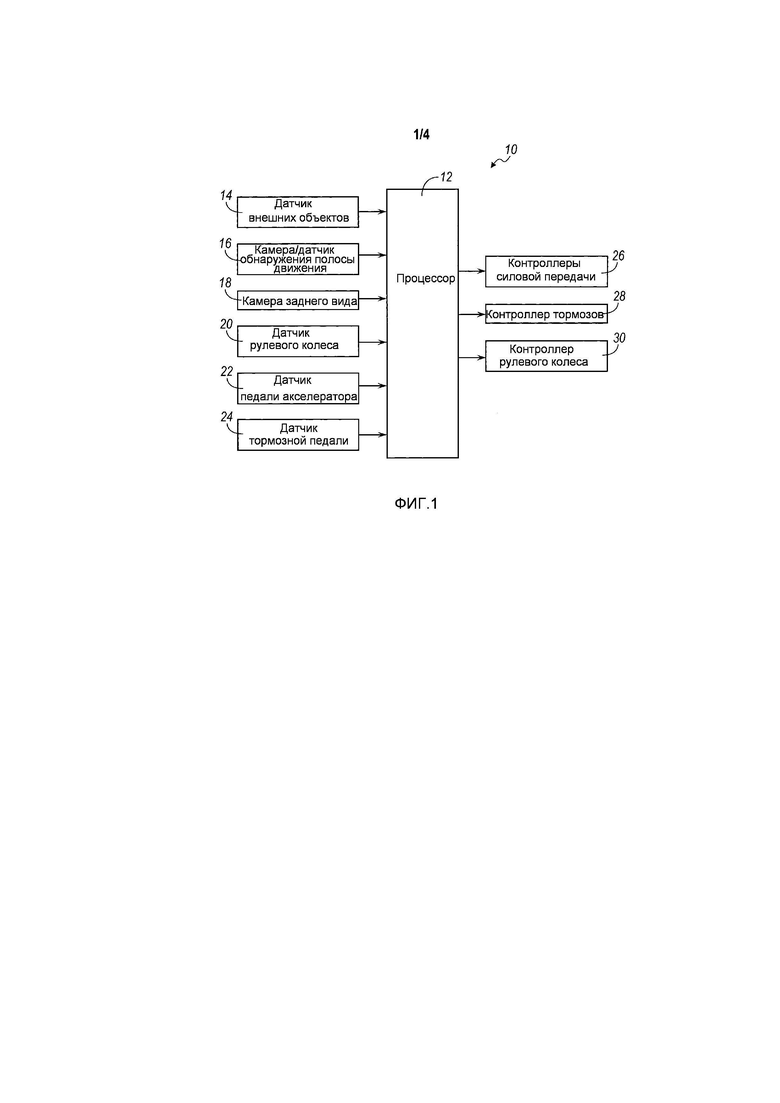
Фиг. 1 иллюстрирует схематическое изображение схемы 10 управления для управления транспортным средством во время события автоматической постановки на стоянку. Событие автоматической постановки на стоянку, или автопарковка, может включать в себя въезд на место стоянки автомобилей (въезд на стоянку) или выезд с места стоянки автомобилей (выезд со стоянки). Как будет пояснено подробнее, оператор транспортного средства может выбирать режим работы, так чтобы транспортное средство могло автоматически становиться на стоянку, а если уже поставлено на стоянку, могло автоматически покидать место стоянки автомобилей и въезжать в полосу движения проезжей части.
Как показано на фиг. 1, по меньшей мере один процессор 12 с возможностью обмена информацией присоединен к различным устройствам, чтобы принимать входные сигналы с устройств. Различные устройства предоставляют процессору 12 возможность подавать сигналы в различные блоки управления, которые управляют скоростью, направлением и общей работой транспортного средства во время события автопарковки. Различные устройства ввода в процессор 12 могут включать в себя множество датчиков 14 внешних объектов, одну или более камер или датчиков 16 обнаружения полосы движения, камеру 18 заднего вида, датчик 20 крутящего момента на рулевом колесе, датчик 22 педали акселератора и датчик 24 тормозной педали.
Один или более датчиков 14 внешних объектов обнаруживают объекты, такие как другие транспортные средства по соседству от самого транспортного средства. В одном из вариантов осуществления, один или более многофункциональных всепогодных датчиков могут быть расположены в области переднего бампера, области заднего бампера, области боковой панели, на ветровом стекле или в любом другом пригодном месте для считывания относительного расположения внешних объектов. Для обнаружения объектов, датчики 14 имеют предопределенное «поле зрения» покрытия или зону покрытия датчика. Зона покрытия датчика может быть композицией многочисленных диаграмм направленности датчиков, выстраивающихся наружу, как правило, в симметричной веерообразной конфигурации из точек возникновения. Датчики, которые пригодны для целей настоящего изобретения, могут включать в себя радиолокатор, лазерный локатор и видеодатчики, в том числе, активные и пассивные инфракрасные датчики.
В одном из вариантов осуществления настоящего изобретения, датчики 14 имеют зону покрытия датчика для функциональных возможностей полного переднего обзора и функциональных возможностей бокового обзора. Предпочтительно, зона покрытия диаграммы направленности датчика должна находиться по меньшей мере на 180 градусов от точки возникновения или, предпочтительно, 270 градусов в определенных местах. Посредством расположения датчиков 14 вокруг многочисленных мест транспортного средства, зона полного покрытия может быть предусмотрена во всех направлениях, из условия чтобы транспортное средство было осведомлено об объектах в любых окружающих его зонах. Как только обнаруживают объект в пределах дальности действия датчиков 14, информация может передаваться в процессор 12, из условия, чтобы процессор мог рассчитывать расстояние между датчиком и внешним объектом.
Камера или датчик 16 обнаружения полосы движения может быть частью системы предупреждения об уходе из полосы движения в транспортном средстве. Камера или датчик 16 обнаружения полосы движения может быть видеодатчиком, например, который установлен за ветровым стеклом, встроен рядом с зеркалом заднего вида транспортного средства и/или спереди от заднего стекла транспортного средства и обращен назад. Камера или датчик 16 обнаружения полосы движения также может быть одним или более лазерных датчиков или одним или более инфракрасных датчиков, установленных на или возле передней части транспортного средства. Любые из вышеприведенных камер или датчиков 16 обнаружения полосы движения выполнены с возможностью обмениваться информацией с ассоциативно связанным контроллером или процессором (таким как процессор 12), который запрограммирован распознавать разметку полос движения. Ассоциативно связанные контроллер и камеры или датчики взаимодействуют со схемой управления автопарковкой, из условия, чтобы полосы движения транспортного потока и полосы постановки на стоянку могли распознаваться при выезде с места постановки на стоянку, как будет обсуждено дополнительно.
Камера 18 заднего вида является камерой заднего хода, типично используемой в целях помощи оператору при осуществлении заднего хода транспортного средства и устранения любых задних закрытых от водителя участков обзора. Вид камеры может быть виден на визуальном устройстве отображения, таком как ЖКД-экран (жидкокристаллического дисплея, LCD), поэтому, оператор может видеть непосредственно сзади транспортного средства. Камера 18 заднего вида также может быть присоединена с возможностью обмена информацией к процессору 12, из условия чтобы процессор мог интерпретировать изображения и определять, находится ли объект в поле зрения, который мешал бы событию автопарковки.
Датчик 20 рулевого колеса, как будет обсуждено дополнительно, ассоциативно связан с рулевым колесом транспортного средства и выполнен с возможностью измерять величину силы или крутящего момента, приложенных к рулевому колесу. Например, во время события автопарковки, транспортное средство может автоматически изменять положение рулевого колеса и ведущих колес. Однако, согласно настоящему изобретению, и как будет подробнее описано, стратегия управления для управления транспортным средством во время события выезда со стоянки может меняться на основании силы или крутящего момента, приложенных пользователем к рулевому колесу. Дополнительные подробности касательно датчика рулевого колеса и автоматического управления рулевым колесом и ведущими колесами приведены ниже со ссылкой на фиг. 6.
Датчик 22 педали акселератора ассоциативно связан с педалью акселератора в транспортном средстве. Подобным образом, датчик 24 тормозной педали ассоциативно связан с тормозной педалью в транспортном средстве. Датчики 22, 24 могут определять величину силы или смещения, ассоциативно связанных с изменением положения педали. Смещение акселератора указывает требуемое ускорение транспортного средства. Дополнительные подробности касательно требуемого ускорения транспортного средства, и каким образом оно соотносится с действующим допустимым ускорением транспортного средство, будут дополнительно описаны ниже.
Как указано выше, по меньшей мере один процессор 12 запрограммирован принимать данные из входных сигналов различных камер и датчиков 14-24. Процессор может эффективно распознавать внешние объекты, окружающие транспортное средство, и может выдавать команды в различные контроллеры в транспортное средство для управления движением транспортного средства во время события автопарковки. Например, процессор 12 может управлять контроллерами 26 силовой передачи, чтобы выдавать величину положительного крутящего момента из двигателя или электрического двигателя для приведения в движение транспортного средства соответствующим образом. Процессор 12 также может выдавать команды в контроллер 28 тормозов, чтобы заставлять тормоза приводиться в действие в случае, если объект становится обнаруженным в пределах окрестности транспортного средства, потенциально ударяемый транспортным средством во время события автопарковки, если транспортное средство не остановлено. Процессор 12 также может выдавать команды в контроллер 30 рулевого колеса, чтобы поворачивать рулевое колесо (и, таким образом, ведущие колеса) на намеченное направление и осуществлять рулевое управление транспортным средством на или с места стоянки автомобилей.
Фиг. 2 и 3 иллюстрируют пример события выезда со стоянки, которое может по меньшей мере частично выполняться системой управления, описанной в настоящем раскрытии. Как показано на фиг. 2, транспортное средство 50 оборудовано датчиками 14 внешних объектов с полем зрения 52 (как описано выше) для обнаружения транспортных средств спереди, сзади и сбоку от транспортного средства 50. Конечно, другие камеры или датчики, описанные выше, могут быть реализованы в транспортном средстве 50, чтобы также обнаруживать окружающие объекты. Процессор 12 в транспортном средстве затем использует принятые данные с камер и датчиков, обрабатывает данные и определяет расстояние между транспортным средством и другими транспортными средствами. Транспортное средство затем меняет свое положение в надлежащую ориентацию, чтобы предоставлять возможность для быстрого и беспрепятственного выезда с места стоянки автомобилей. Затем, во время события выезда со стоянки, транспортное средство осведомлено о своих окрестностях при автоматическом выводе с места стоянки автомобилей. Например, процессор 12 не будет давать команду транспортному средству выходить с места стоянки автомобилей, если другие транспортные средства находятся в полосе движения транспортного потока, непосредственно прилегающей к транспортному средству, или приближаются к периферии транспортного средства. Когда путь свободен, и никакие объекты не обнаружены в полосе движения транспортного потока, прилегающей к параллельному месту постановки на стоянку, транспортное средство может начинать выезжать с места стоянки автомобилей, как указано стрелкой и показано на фиг. 3.
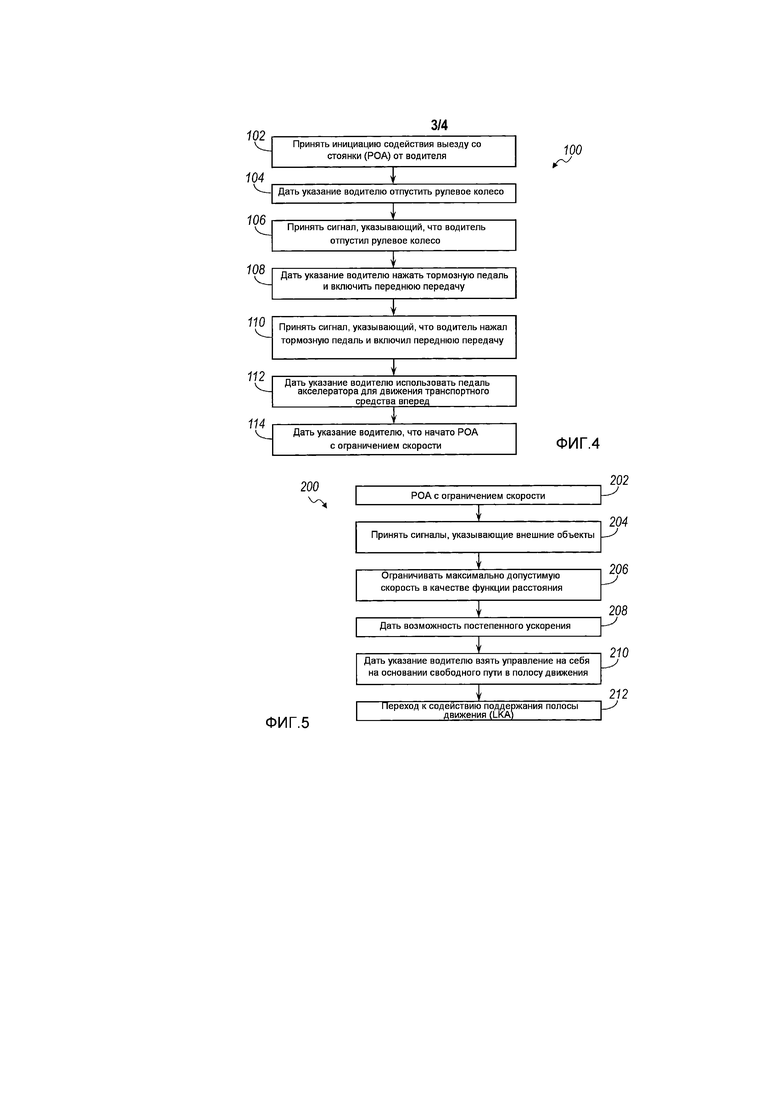
Со ссылкой на фиг. 4, проиллюстрирован пример алгоритма 100, используемого процессором 12 во время стадий, которые приводят к событию выезда со стоянки. Прежде всего, на 102, процессор принимает запрос от оператора транспортного средства инициировать сеанс содействия выезду со стоянки (POA), в котором транспортное средство может автоматически содействовать водителю при выезде с места стоянки автомобилей. Такой запрос от оператора может приниматься посредством выбора оператором на сенсорном экране в транспортном средстве, с возможностью обмена информацией присоединенном к процессору 12. Запрос также может приниматься посредством нажатия оператором кнопки или другого такого механизма, которое обозначает желание оператора войти в сеанс POA.
С транспортным средством, поставленным на стоянку, на основании запроса POA, процессор затем побуждает указание выводиться оператору, уведомляющее оператора, что следует отпустить рулевое колесо, на 104. Чтобы сделать это, процессор 12 может вызывать визуальное или слышимое уведомление, чтобы оператор отпустил рулевое колесо. На 106, процессор 12 принимает сигнал, указывающий, что оператор транспортного средства отпустил рулевое колесо. Такой сигнал может отправляться в процессор 12 с датчика крутящего момента рулевого колеса, как будет дополнительно описано ниже со ссылкой на фиг. 6.
На 108, процессор 12 выводит сигнал для выдачи указания водителю нажать тормозную педаль и включить переднюю передачу («DRIVE» или «D»), если еще не сделал это. Вновь, такое уведомление может выдаваться оператору визуально или вслух. После отправки такого запроса, в ответ на нажатие оператором тормозной педали и включение передней передачи, процессором 12 принимается сигнал о таком действии на 110. Такой сигнал может отправляться с датчика тормозной педали, присоединенного к тормозной педали и выполненного с возможностью считывать нажатие или перемещение тормозной педали. Этот датчик тормозной педали может быть существующим датчиком, например, в качестве части системы с электрическим управлением тормозами.
В этот момент может быть, что может начинаться сеанс POA. Как обсуждено на всем протяжении этого раскрытия, во время сеанса POA, процессор будет принимать сигналы с различных датчиков и/или камер и выводить сигналы в различные контроллеры для управления движением транспортного средства для выезда с места постановки на стоянку. Когда транспортное средство готово выезжать с места постановки на стоянку на основании расположения других транспортных средств и объектов вокруг, на 112, процессор выводит сигнал, чтобы вслух/визуально дать указание водителю использовать педаль акселератора для перемещения транспортного средства вперед. Как будет описано со ссылкой на фиг. 5, сеанс POA может содействовать оператору, автоматическим управлением транспортным средством для выезда с места стоянки автомобилей, тем временем, ставя ограничения скорости на транспортное средство. На 114, указание может выдаваться оператору, что сеанс POA начался с ограничением скорости в наличии. Таким образом, водитель может быть уверен, что это действующее нажатие педали акселератора может не превращаться непосредственно в соответствующую величину действующего ускорения транспортного средства.
Касательно фиг. 5, алгоритм отдельного сеанса POA (или продолжение алгоритма по фиг. 4) проиллюстрирован на 200. Сеанс POA начался ограничением скорости на этапе 202, подобном этапу 114 на фиг. 4.
На 204, процессор 12 принимает сигналы с датчиков и камер, таких как описанные со ссылкой на фиг. 1. Эти сигналы являются входными сигналами, которые предоставляют процессору возможность отправлять команды в различные контроллеры 26, 28, 30 для управления движением транспортного средства. Например, на основании расстояния между транспортным средством и объектами сзади, впереди и сбоку от транспортного средства, процессор может давать команду транспортному средству изменить положение рулевого управления и ускориться с места стоянки автомобилей, когда ясно, что это нужно сделать.
Когда путь свободен, транспортное средство начинает автоматически ускоряться с места стоянки автомобилей. На 206, ограничение ставится на максимально допустимую скорость и/или на максимально допустимый темп изменения скорости (ускорение). Это ограничение может меняться на основании разрыва между транспортным средством и обнаруженными внешними объектами, такими как другие транспортные средства впереди от транспортного средства. В то время как оператор нажимает педаль акселератора, указывая требуемое ускорение для приведения в движение транспортного средства с места стоянки автомобилей, контроллер будет давать возможность ограниченного ускорения; ограничение на скорость и/или ускорение основано на том, как далеко находятся внешние объекты.
В рабочем примере, на основании обнаруженных объектов вокруг транспортного средства, когда инициирован сеанс POA, намеченное направление движения определяется процессором, а рулевое колесо и ускорение транспортного средства управляются соответствующим образом. По мере того, как объект вдоль этого пути или в пределах «буферной зоны» вокруг транспортного средства становится ближе, скорость и/или ускорение транспортного средства автоматически ограничивается соответствующим образом. Например, транспортному средству может быть предоставлена возможность достигать 4 километров в час на основании расстояния между транспортным средством и другим транспортным средством, находящимся в нескольких метрах впереди. Это расстояние может убывать между двумя транспортными средствами по мере того, как транспортное средство ускоряется с места стоянки автомобилей во время маневра выезда со стоянки. В то время как расстояние убывает до 1,5 м, процессор может ограничивать максимально допустимую скорость до 1,5 километров в час. Конечно, в то время как транспортное средство «минует» другие транспортные средства впереди, тем временем, перемещаясь от места стоянки автомобилей, максимально допустимая скорость может вновь возрастать соответствующим образом.
Максимально допустимые скорость/ускорение могут возрастать и убывать согласно линейной зависимости, что касается расстояния между транспортным средством и другими внешними транспортными средствами. Конечно, могут существовать другие нелинейные зависимости. Например, криволинейная зависимость может существовать, из условия чтобы максимально допустимые скорость/ускорение убывали с большим темпом по мере того, как убывает расстояние.
На 208, постепенное повышение максимально допустимых скорости и/или ускорения допускается по мере того, как транспортное средство выезжает с места стоянки автомобилей. По мере того, как транспортное средство выезжает с места стоянки автомобилей, и расстояние от транспортного средства до внешнего объекта возрастает, скорости транспортного средства дается возможность постепенно возрастать, чтобы отражать положение педали акселератора. Как описано выше, на этапе 112 оператор нажимает педаль акселератора, и транспортное средство ускоряется ограниченным образом. На этапе 208, процессор предоставляет ограничениям на максимально допустимые скорость и/или ускорение возможность ослабевать. Другими словами, разность между требуемым ускорением (основанным на положении педали акселератора) и действующим командным ускорением уменьшается во время этого постепенного ускорения на 208.
Переход между ограниченными максимально допустимыми скоростью и/или ускорением на снятие таких ограничений может выполняться за настраиваемое расстояние между транспортным средством и другими транспортными средствами. Другими словами, переход с ограничения скорости на отсутствие ограничения скорости может происходить по мере того, как расстояние между транспортным средством и другими транспортными средствами возрастает в направлении определенного запрограммированного расстояния. В качестве альтернативы или в комбинации с выполнением перехода за настраиваемое расстояние (например, 20 футов), переход также может происходить за некоторое настраиваемое значение времени (например, 3 секунды).
На 210, в некоторый момент, по мере того, как транспортное средство постепенно ускоряется, процессор выдает слышимое/визуальное указание оператору взять на себя управление рулевым колесом. Такое указание также может происходить в ответ на свободный путь, существующий перед транспортным средством в полосе движения транспортного потока, в которую повернуло транспортное средство. Как только оператор берет на себя управление рулевым колесом, как определяется сигналом, принятым с датчика крутящего момента на рулевом колесе, транспортное средство может выходить из сеанса POA и давать возможность нормального управления транспортного средства оператором.
В качестве необязательного этапа 212, транспортное средство может переходить в режим работы содействия поддержанию полосы движения (LKA). По мере того, как транспортное средство выезжает с места стоянки автомобилей и въезжает в полосу движения транспортного потока, может происходить ввод в действие этого режима работы, в котором камера/датчики 16 обнаружения полосы движения могут вводиться в действие, а сигналы отправляться в процессор 12. Процессор 12 затем может отправлять уведомления или управлять транспортным средством, как обсуждено ранее, чтобы поддерживать транспортное средство в полосе движения транспортного потока.
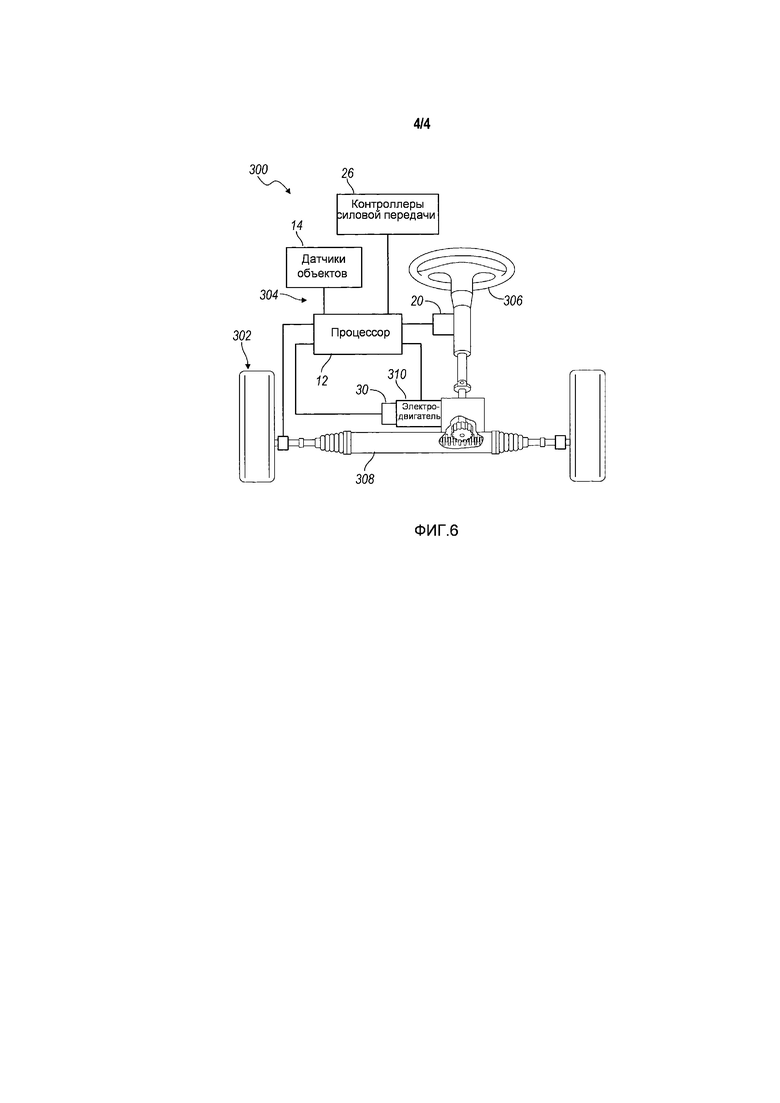
Со ссылкой на фиг. 6, проиллюстрирована схема автоматической системы рулевого управления. Процессор 12, например, принимает сигналы с датчиков 14 объектов и выдает команды в автоматическую систему рулевого управления, а также контроллеры 26 силовой передачи для автоматического выезда транспортного средства с места стоянки автомобилей. Процессор 12 находится в транспортном средстве 300, которое включает в себя пару поворачиваемых колес 302. Колеса 302 могут быть передними колесами на транспортном средстве 300. Транспортное средство 300 также включает в себя систему 304 рулевого управления. Система 304 рулевого управления имеет рулевое колесо 306 в соединении с возможностью вращения с колесами 302 через рулевой привод 308. Рулевой привод 308 передает вращательный входной сигнал рулевого колеса 306 на колеса 302, и наоборот. Рулевой привод 308 может содержать рулевую колонку, продолжающуюся от рулевого колеса 306 до редуктора рулевого механизма, присоединяющего поперечные тяги к цапфам (не показаны), на которые могут быть смонтированы узлы (не показаны) ступицы и подшипника для присоединения колес 302 к рулевому колесу 306.
Рулевой привод 308, более точно, редуктор рулевого механизма, может давать выигрыш в силе от рулевого колеса 306 к ходовому колесу 302. Выигрыш в силе рулевого привода 308 является таким, что рулевое колесо 306 может проходить множество оборотов в одном направлении, тем временем, колесо 302 поворачивается менее чем на 180 градусов в одном направлении от максимального левого поворота до максимально правого поворота, или наоборот. Рулевой привод 308 здесь схематически показан в качестве редуктора рулевого механизма с механизмом реечной передачи, хотя могут использоваться любые другие. Рулевой привод 308 также может предусматривать рулевое управление с регулируемым передаточным отношением, из условия чтобы скорость поворачивания колеса 302 повышалась или понижалась около ведущего прямо вперед положения (к примеру, на сверхмощных транспортных средствах большой грузоподъемности) или на концах диапазона левого или правого поворота (к примеру, на меньших автомобилях и пассажирских автомобилях).
Электродвигатель 310 рулевого управления с силовым приводом может быть связан с рулевым приводом 308 и используется для содействия поворачиванию рулевых колес 302. Электродвигатель 310 рулевого управления с силовым приводом выполнен с возможностью выдавать крутящий момент в систему рулевого управления, чтобы поворачивать колеса 302 транспортного средства 300. Электродвигатель 310 рулевого управления с силовым приводом может быть электродвигателем электронного усилителя для обеспечения усиления, чтобы помогать поворачиванию колес 302, когда водитель поворачивает рулевое колесо 306, или может быть электродвигателем, способным к полному выполнению события автопарковки, при котором электродвигатель 310 поворачивает колеса 302, в то время как транспортное средство выполняет автоматическое управляемое компьютером событие выезда со стоянки, как описано выше. Другими словами, во время события автопарковки, описанного выше, при выезде с места стоянки автомобилей, сигналы отправляются в контроллер 30 рулевого колеса, который, в свою очередь, управляет работой электродвигателя 310 для поворачивания колес.
Датчик 20 крутящего момента на рулевом колесе, описанный выше, также проиллюстрирован. Как описано, датчик крутящего момента присоединен с возможностью обмена информацией к рулевому колесу 30, чтобы измерять величину крутящего момента или силы, приложенной к рулевому колесу 306 оператором. Во время события выезда со стоянки, сеанс POA может прекращаться, управляемые ограничения на максимально допустимые скорость/ускорение могут сниматься, и автоматическое рулевое управление может прекращаться на основании силы, прикладываемой к рулевому колесу 306, в качестве считываемой датчиком 20 крутящего момента на рулевом колесе. Эти действия могут происходить, только если сила или крутящий момент выше определенного порогового значения выданы на рулевое колесо 306.
Конечно, предполагается, что общая работа автоматической системы 204 рулевого управления может управляться одним или более процессоров 12 на основании входных сигналов, принятых с различных датчиков или камер 14-24. Таким образом, транспортное средство может автоматически выезжать с места стоянки автомобилей с ограниченным пользовательским вводом.
Последовательности операций, способы или алгоритмы, раскрытые в материалах настоящей заявки, могут быть подлежащими выполнению/реализованы устройством обработки, контроллером или компьютером, которые могут включать в себя существующий программируемый электронный блок управления или специальный электронный блок управления. Подобным образом, последовательности операций, способы или алгоритмы могут храниться в качестве данных и команд, исполняемых контроллером или компьютером, в многих формах, в том числе, ноне в качестве ограничения, информации, постоянно хранимой на незаписываемом запоминающем носителе, таком как устройства ПЗУ (постоянного запоминающего устройства, ROM), и информации, с возможностью изменения хранимой на записываемом запоминающем носителе, таком как гибкие диски, магнитные ленты, CD (компакт-диски), устройства ОЗУ (оперативного запоминающего устройства, RAM) и другие магнитные и оптические носители. Последовательности операций, способы или алгоритмы также могут быть реализованы в программном исполняемом объекте. В качестве альтернативы, последовательности операций, способы или алгоритмы могут быть воплощены полностью или частично с использованием пригодных аппаратных компонентов, таких как специализированные интегральные схемы (ASIC), программируемые пользователем вентильные матрицы (FPGA), конечные автоматы, контроллеры или другие аппаратные компоненты или устройства, или комбинации аппаратных средств, программных средств и программно-аппаратных компонентов.
Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы, охваченные формулой изобретения. Словесные формулировки, используемые в описании изобретения, предпочтительнее являются словесными формулировками описания, нежели ограничением, и понятно, что различные изменения могут быть произведены, не выходя за пределы сущности и объема изобретения. Как описано ранее, признаки различных вариантов осуществления могут комбинироваться для формирования дополнительных вариантов осуществления изобретения, которые могут не быть описаны или проиллюстрированы в прямой форме. Несмотря на то, что различные варианты осуществления могли бы быть описаны в качестве обеспечивающих преимущества или являющихся предпочтительными над другими вариантами осуществления или реализациями предшествующего уровня техники, что касается одной или более требуемых характеристик, рядовые специалисты в данной области техники осознают, что один или более признаков или характеристик могут быть скомпрометированы для достижения требуемых общих свойств системы, которые зависят от конкретных применения и реализации. Эти свойства могут включать в себя, но не в качестве ограничения: себестоимость, прочность, надежность, затраты в течение жизненного цикла, пригодность для продажи, внешний вид, упаковку, габариты, ремонтопригодность, вес, технологичность, легкость сборки, и т.д. По существу, варианты осуществления, описанные в качестве менее желательных, чем другие варианты осуществления, или реализации предшествующего уровня техники по отношению к одной или более характеристик, не выходят за пределы объема изобретения и могут быть желательными для конкретных применений.

Группа изобретений относится к транспортному средству и к способу выезда транспортного средства с места стоянки. Способ содержит этапы, на которых: Дают указание водителю отпустить рулевое колесо; После отпускания рулевого колеса ограничивают максимально допустимую скорость транспортного средства на основании расстояния между транспортным средством и внешним объектом; Автоматически поворачивают рулевое колесо; Автоматически ускоряются с места стоянки автомобилей; В то время как отъезжают с места стоянки, постепенно повышают максимально допустимую скорость на основании увеличения расстояния, между транспортным средством и внешними объектами. Транспортное средство содержит множество обнаруживающих внешние объекты датчиков и минимум один контроллер. Контроллер запрограммирован, в ответ на ввод в действие оператором рабочего режима, выполненного с возможностью автоматически содействовать транспортному средству при выезде с параллельного места постановки на стоянку, изменять ограничение на действующую скорость транспортного средства на основании увеличения расстояния между транспортным средством и внешними объектами, по мере того, как транспортное средство выезжает с параллельного места постановки на стоянку. Достигается предоставление компьютеризированного способа выезда транспортного средства с места стоянки автомобилей. 3 н. и 17 з.п. ф-лы, 6 ил.
1. Компьютеризованный способ выезда транспортного средства с места стоянки автомобилей, содержащий этапы, на которых:
дают указание водителю отпустить рулевое колесо;
после отпускания рулевого колеса ограничивают максимально допустимую скорость транспортного средства на основании расстояния между транспортным средством и внешним объектом;
автоматически поворачивают рулевое колесо;
автоматически ускоряются с места стоянки автомобилей; и
в то время как отъезжают с места стоянки, постепенно повышают максимально допустимую скорость на основании увеличения расстояния.
2. Способ по п. 1, в котором требуемое ускорение транспортного средства определено положением педали акселератора, и дополнительно содержащий этап, на котором постепенно повышают действующее ускорение транспортного средства в направлении требуемого ускорения транспортного средства на основании увеличения расстояния.
3. Способ по п. 1, в котором этап ограничения включает в себя этап, на котором ограничивают максимально допустимую скорость независимо от положения педали акселератора.
4. Способ по п. 1, дополнительно содержащий этап, на котором перед этапом автоматического ускорения дают указание водителю нажать педаль акселератора.
5. Способ по п. 1, дополнительно содержащий этап, на котором вводят в действие рабочий режим содействия выезду со стоянки (POA) на основании пользовательского выбора, при этом этапы выдачи указания, ограничения, автоматического поворачивания, автоматического ускорения и постепенного повышения выполняются на основании ввода в действие рабочего режима POA.
6. Способ по п. 1, дополнительно содержащий этап, на котором снимают ограничения на максимально-допустимую скорость на основании силы, прикладываемой к рулевому колесу.
7. Способ по п. 1, в котором этап постепенного увеличения максимально допустимой скорости дополнительно основан на времени, истекшем после превышения расстоянием порогового значения.
8. Транспортное средство, содержащее:
множество обнаруживающих объекты датчиков, выполненных с возможностью обнаруживать расположение внешних объектов; и
по меньшей мере один контроллер, запрограммированный, в ответ на ввод в действие оператором рабочего режима, выполненного с возможностью автоматически содействовать транспортному средству при выезде с параллельного места постановки на стоянку, изменять ограничение на действующую скорость транспортного средства на основании увеличения расстояния между транспортным средством и внешними объектами, по мере того, как транспортное средство выезжает с параллельного места постановки на стоянку.
9. Транспортное средство по п. 8, в котором по меньшей мере один контроллер дополнительно запрограммирован ограничивать скорость с линейным темпом, основанным на расстоянии.
10. Транспортное средство по п. 8, дополнительно содержащее педаль акселератора, которая, когда нажата, указывает величину требуемого ускорения, при этом по меньшей мере один контроллер дополнительно запрограммирован ограничивать действующее ускорение транспортного средства величиной, меньшей, чем требуемое ускорение, на основании расстояния между транспортным средством и внешними объектами.
11. Транспортное средство по п. 10, в котором по меньшей мере один контроллер дополнительно запрограммирован снижать ограничение и повышать действующее ускорение в направлении требуемого ускорения в ответ на увеличение расстояния.
12. Транспортное средство по п. 8, в котором по меньшей мере один контроллер дополнительно запрограммирован поворачивать колеса транспортного средства в положение, основанное на расположении внешних объектов.
13. Транспортное средство по п. 12, в котором намеченное направление движения определяется положением колес, при этом по меньшей мере один контроллер дополнительно запрограммирован ограничивать действующую скорость транспортного средства на основании расположения внешних объектов вдоль намеченного направления движения.
14. Транспортное средство по п. 8, дополнительно содержащее датчик рулевого колеса, присоединенный к по меньшей мере одному контроллеру и выполненный с возможностью обнаруживать силу, прикладываемую к рулевому колесу оператором, при этом по меньшей мере один контроллер дополнительно запрограммирован снимать ограничение на действующую скорость транспортного средства на основании силы, прикладываемой к рулевому колесу.
15. Транспортное средство, содержащее:
множество датчиков, выполненных с возможностью считывать расположение первого объекта спереди транспортного средства и второго объекта сзади транспортного средства, в то время как транспортное средство поставлено на стоянку на параллельном месте постановки на стоянку между первым и вторым объектами; и
по меньшей мере один контроллер, присоединенный к датчикам и запрограммированный уменьшать ограничение по допустимому ускорению транспортного средства по мере того, как транспортное средство выезжает с параллельного места постановки на стоянку.
16. Транспортное средство по п. 15, в котором по меньшей мере один контроллер дополнительно запрограммирован обеспечивать возрастание действующего ускорения транспортного средства в направлении требуемого ускорения транспортного средства на основании расстояния между транспортным средством и по меньшей мере первым и вторым объектами.
17. Транспортное средство по п. 15, в котором по меньшей мере один контроллер дополнительно запрограммирован обеспечивать возрастание действующего ускорения транспортного средства в направлении требуемого ускорения транспортного средства на основании времени после того, как транспортное средство выехало с параллельного места постановки на стоянку.
18. Транспортное средство по п. 15, дополнительно содержащее датчик рулевого колеса, присоединенный к по меньшей мере одному контроллеру, при этом по меньшей мере один контроллер дополнительно запрограммирован снимать ограничение на допустимое ускорение транспортного средства на основании силы, прикладываемой к рулевому колесу.
19. Транспортное средство 15, в котором по меньшей мере один контроллер дополнительно запрограммирован поворачивать колеса транспортного средства в положение, основанное на расположении первого объекта.
20. Транспортное средство по п. 19, в котором намеченное направление движения определяется положением колес, при этом по меньшей мере один контроллер дополнительно запрограммирован уменьшать ограничение на допустимое ускорение транспортного средства на основании расположения первого объекта вдоль намеченного направления движения.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| JP 2005178626 A, 07.07.2005 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

