Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления и к устройству управления транспортного средства с функцией автоматического вождения.
Уровень техники
[0002] Как раскрыто в патентном документе 1, предлагается технология, в которой устройство управления транспортного средства с функцией автоматического вождения переключается с вождения вручную на автоматическое вождение посредством переключения на автоматическое вождение при обнаружении перехвата управления.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2012-51441
Сущность изобретения
[0004] Тем не менее, традиционный пример, раскрытый в патентном документе 1, не рассматривает изменения характеристик вождения во время переключения с вождения вручную на автоматическое вождение. Соответственно, традиционный пример имеет такую проблему, что человек, занимающий место в транспортном средстве, испытывает некомфортное ощущение во время переключения с вождения вручную на автоматическое вождение.
Настоящее изобретение осуществлено, чтобы разрешать такую традиционную проблему, и его цель заключается в том, чтобы предоставлять способ управления и устройство управления транспортного средства с функцией автоматического вождения, которые позволяют подавлять некомфортное ощущение человека, занимающего место в транспортном средстве, при переключении с вождения вручную на автоматическое вождение.
[0005] В одном аспекте настоящего изобретения, когда переключение с вождения вручную на автоматическое вождение выполняется, автоматическое вождение выполняется с поддерживаемыми характеристиками вождения вручную, причем характеристики вождения вручную представляют собой характеристики вождения при вождении вручную.
Преимущества изобретения
[0006] Согласно одному аспекту настоящего изобретения, некомфортное ощущение человека, занимающего место в транспортном средстве, может подавляться во время переключения с вождения вручную на автоматическое вождение.
Краткое описание чертежей
[0007] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства управления транспортного средства с функцией автоматического вождения согласно одному варианту осуществления настоящего изобретения.
Фиг. 2 является пояснительным видом, иллюстрирующим время T1 поддержания, время T2 переключения и изменения скорости транспортного средства и расстояния между транспортными средствами при переключении с вождения вручную на автоматическое вождение.
Фиг. 3 является блок-схемой, иллюстрирующей подробную конфигурацию модуля обнаружения состояния рассматриваемого транспортного средства.
Фиг. 4 является блок-схемой, иллюстрирующей подробную конфигурацию модуля обнаружения состояния окрестностей.
Фиг. 5 является пояснительным видом, иллюстрирующим три способа распознавания для распознавания характеристик действия при вождении посредством машинного обучения.
Фиг. 6 является пояснительным видом, иллюстрирующим последовательность операций распознавания действия при вождении для обнаруженных точек характеристик.
Фиг. 7 является пояснительным видом, иллюстрирующим классификацию состояний движения.
Фиг. 8 является пояснительным видом, иллюстрирующим пример классификации фрагментов данных на других транспортных средствах на значимые элементы.
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей этапы выполнения машинного обучения на основе входной информации и получения характеристик автоматического вождения и характеристик вождения вручную.
Фиг. 10A является пояснительным видом случая, в котором скорость движения рассматриваемого транспортного средства и скорость движения других транспортных средств, движущихся в окрестностях, составляет 80 (км/ч).
Фиг. 10B является пояснительным видом случая, в котором скорость движения рассматриваемого транспортного средства составляет 60 (км/ч), и скорость движения других транспортных средств, движущихся в окрестностях, составляет 80 (км/ч).
Фиг. 11 включает в себя графики, иллюстрирующие взаимосвязи между каждым из скорости транспортного средства и расстояния между транспортными средствами и их воспринимаемой величиной, взаимосвязи между воспринимаемыми величинами и некомфортным ощущением и взаимосвязи между каждым из скорости транспортного средства и расстояния между транспортными средствами и некомфортным ощущением.
Фиг. 12 является пояснительным видом обработки получения T1 и T2 на основе характеристик автоматического вождения и характеристик вождения вручную, сохраненных в базе данных характеристик вождения и моделях взаимосвязи некомфортного ощущения и физических величин.
Фиг. 13A является графиком, иллюстрирующим взаимосвязи между скоростью транспортного средства и некомфортным ощущением.
Фиг. 13B является графиком, иллюстрирующим взаимосвязи между скоростью транспортного средства и некомфортным ощущением в случае, если ширина дороги является небольшой, и взаимосвязи в случае, если ширина дороги является большой.
Фиг. 14A является графиком, иллюстрирующим взаимосвязи между расстоянием между транспортными средствами и некомфортным ощущением.
Фиг. 14B является графиком, иллюстрирующим взаимосвязи между расстоянием между транспортными средствами и некомфортным ощущением в случае, если имеется другое транспортное средство в смежной полосе движения, и взаимосвязи в случае, если отсутствуют транспортные средства в смежной полосе движения.
Фиг. 15 является пояснительным видом, иллюстрирующим взаимосвязи между изменениями скорости транспортного средства и расстояния между транспортными средствами, временем T1 поддержания и временем T2 переключения.
Фиг. 16A является графиком, иллюстрирующим секции рывка в изменении скорости транспортного средства.
Фиг. 16B является графиком, иллюстрирующим изменения ускорения в изменении скорости транспортного средства.
Фиг. 16C является графиком, иллюстрирующим изменения скорости в изменении скорости транспортного средства.
Фиг. 17A является пояснительным видом, иллюстрирующим состояние, в котором рассматриваемое транспортное средство движется при 40 (км/ч).
Фиг. 17B является графиком, иллюстрирующим изменения скорости транспортного средства в случае, если скорость транспортного средства увеличивается с 40 (км/ч) до 60 (км/ч).
Фиг. 17C является пояснительным видом, иллюстрирующим состояние, в котором рассматриваемое транспортное средство движется при 80 (км/ч).
Фиг. 17D является графиком, иллюстрирующим изменения скорости транспортного средства в случае, если скорость транспортного средства увеличивается с 80 (км/ч) до 100 (км/ч).
Фиг. 18A является пояснительным видом, иллюстрирующим состояние, в котором рассматриваемое транспортное средство движется по дороге с небольшой шириной дороги при 40 (км/ч).
Фиг. 18B является графиком, иллюстрирующим изменения скорости транспортного средства в случае, если скорость транспортного средства увеличивается с 40 (км/ч) до 60 (км/ч) в то время, когда транспортное средство движется по дороге с небольшой шириной дороги.
Фиг. 18C является пояснительным видом, иллюстрирующим состояние, в котором рассматриваемое транспортное средство движется по дороге с большой шириной дороги при 40 (км/ч).
Фиг. 18D является графиком, иллюстрирующим изменения скорости транспортного средства в случае, если скорость транспортного средства увеличивается с 40 (км/ч) до 60 (км/ч) в то время, когда транспортное средство движется по дороге с большой шириной дороги.
Фиг. 19A является пояснительным видом, иллюстрирующим состояние, в котором рассматриваемое транспортное средство движется при расстоянии между транспортными средствами, составляющем 50 (м).
Фиг. 19B является графиком, иллюстрирующим изменения расстояния между транспортными средствами в случае, если расстояние между транспортными средствами уменьшается с 50 (м) до 20 (м).
Фиг. 19C является пояснительным видом, иллюстрирующим состояние, в котором рассматриваемое транспортное средство движется при расстоянии между транспортными средствами, составляющем 100 (м).
Фиг. 19D является графиком, иллюстрирующим изменения расстояния между транспортными средствами в случае, если расстояние между транспортными средствами уменьшается со 100 (м) до 70 (м).
Фиг. 20A является пояснительным видом, иллюстрирующим состояние, в котором расстояние между транспортными средствами составляет 80 (м), и другое транспортное средство движется в смежной полосе движения.
Фиг. 20B является графиком, иллюстрирующим изменения расстояния между транспортными средствами в случае, если имеется другое транспортное средство в смежной полосе движения, и расстояние между транспортными средствами уменьшается с 80 (м) до 50 (м).
Фиг. 20C является пояснительным видом, иллюстрирующим состояние, в котором расстояние между транспортными средствами составляет 80 (м), и транспортные средства не движутся в смежной полосе движения.
Фиг. 20D является графиком, иллюстрирующим изменения расстояния между транспортными средствами в случае, если отсутствуют транспортные средства в смежной полосе движения, и расстояние между транспортными средствами уменьшается с 80 (м) до 50 (м).
Фиг. 21 является пояснительным видом, иллюстрирующим переключение характеристик вождения в случае, если рассматриваемое транспортное средство останавливается во время T1 поддержания.
Фиг. 22 является блок-схемой последовательности операций способа, иллюстрирующей этапы обработки устройства управления транспортного средства с функцией автоматического вождения согласно варианту осуществления настоящего изобретения.
Фиг. 23 является пояснительным видом, иллюстрирующим характеристики вождения вручную и характеристики автоматического вождения для вождения, выполняемого в модифицированном примере настоящего изобретения.
Подробное описание вариантов осуществления
[0008] Ниже описывается вариант осуществления настоящего изобретения со ссылкой на чертежи. Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства управления транспортного средства с функцией автоматического вождения согласно одному варианту осуществления настоящего изобретения.
[0009] Как проиллюстрировано на фиг. 1, устройство управления транспортного средства с функцией автоматического вождения согласно варианту осуществления включает в себя модуль 1 обнаружения состояния движения, модуль 4 определения сопоставленных с конкретным человеком характеристик вождения, базу 7 данных характеристик вождения, модуль 8 определения характеристик автоматического вождения и модуль 11 задания параметров переключения.
[0010] В устройстве управления транспортного средства с функцией автоматического вождения согласно варианту осуществления, как проиллюстрировано на фиг. 2, когда вождение переключается на автоматическое вождение в ходе движения при вождении вручную в момент t0 времени, автоматическое вождение на основе характеристик вождения вручную выполняется в течение времени T1 поддержания характеристик вождения вручную (далее называемого "временем T1 поддержания" для краткости), полученного посредством способа, описанного ниже. Характеристики вождения вручную, описанные в данном документе, представляют собой характеристики вождения при вождении вручную человеком, занимающим место в транспортном средстве. Характеристики вождения вручную включают в себя скорость, ускорение транспортного средства, расстояние между транспортными средствами, ускорение при рулении, угловую скорость относительно вертикальной оси и т.п. Характеристики вождения вручную не ограничены характеристиками вождения вручную, описанными выше, и могут использоваться любые характеристики, в общем, используемые для того, чтобы указывать характеристики транспортного средства.
После этого, в момент t1 времени, характеристики вождения постепенно переключаются на характеристики автоматического вождения во время T2 переключения характеристик вождения (далее называемое "временем T2 переключения" для краткости), полученное посредством способа, описанного ниже, и во время t2, полностью изменяются на характеристики автоматического вождения. Характеристики автоматического вождения, описанные в данном документе, представляют собой характеристики вождения, отличающиеся от характеристик вождения вручную. Характеристики автоматического вождения могут представлять собой характеристики, заданные посредством распознавания характеристик вождения вручную человеком, занимающим место в транспортном средстве, или характеристики, заданные для каждого окружения движения (нормальной дороги, скоростной автомагистрали и т.п.), и могут использоваться любые традиционные характеристики вождения для автоматического вождения. На фиг. 2, скорость транспортного средства (кривая q11) и расстояние между транспортными средствами (кривая q12) задаются как примеры физических величин транспортного средства с функцией автоматического вождения. Следует отметить, что на фиг. 2, хотя характеристики вождения при автоматическом вождении проиллюстрированы как переключающиеся с характеристик вождения вручную на характеристики автоматического вождения, способ изменения характеристик вождения не ограничен этим и может представлять собой любой способ при условии, что характеристики вождения при автоматическом вождении изменяются с характеристик вождения при вождении вручную на характеристики вождения, отличающиеся от них.
[0011] Функции, описанные в варианте осуществления, могут реализовываться посредством одной или нескольких схем обработки. Схема обработки включает в себя обрабатывающее устройство с электрической схемой. Обрабатывающее устройство также включает в себя такие устройства, как специализированную интегральную схему (ASIC) и традиционные схемные части, сконструированные с возможностью выполнять функции, описанные в варианте осуществления.
[0012] Описание модуля 1 обнаружения состояния движения
Как проиллюстрировано на фиг. 1, модуль 1 обнаружения состояния движения включает в себя модуль 2 обнаружения состояния рассматриваемого транспортного средства, который обнаруживает состояние рассматриваемого транспортного средства, и модуля 3 обнаружения состояния окрестностей, который обнаруживает состояние окрестностей.
[0013] Как проиллюстрировано на фиг. 3, модуль 2 обнаружения состояния рассматриваемого транспортного средства получает данные скорости транспортного средства, обнаруженные посредством датчика 32 скорости транспортного средства, данные ускорения, обнаруженные посредством датчика 33 ускорения, и данные угла поворота при рулении, обнаруженные посредством датчика 34 угла поворота при рулении, и обнаруживает состояние движения рассматриваемого транспортного средства на основе этих фрагментов данных. Фрагменты данных, обнаруженные в модуле 2 обнаружения состояния рассматриваемого транспортного средства, выводятся в модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения, проиллюстрированные на фиг. 1.
[0014] Как проиллюстрировано на фиг. 4, модуль 3 обнаружения состояния окрестностей включает в себя модуль 35 обнаружения пространств между транспортными средствами, модуль 36 обнаружения объектов, отличных от транспортных средств, модуль 37 обнаружения типов окружающих транспортных средств, модуль 38 обнаружения полос движения, модуль 39 обнаружения типов дорог и модуль 40 обнаружения информации дорожного движения.
[0015] Модуль 35 обнаружения пространств между транспортными средствами обнаруживает переднее, заднее, левое и правое пространства между транспортными средствами для рассматриваемого транспортного средства посредством использования радара и т.п. Модуль 36 обнаружения объектов, отличных от транспортных средств, обнаруживает объекты, отличные от транспортных средств, такие как пешеходы и велосипеды, в окрестностях рассматриваемого транспортного средства, на основе изображений, захваченных посредством камер, выполненных с возможностью захватывать изображения окрестностей.
[0016] Модуль 37 обнаружения типов окружающих транспортных средств обнаруживает типы транспортных средств в окрестностях рассматриваемого транспортного средства из изображений, захваченных посредством камер. Например, модуль 37 обнаружения типов окружающих транспортных средств обнаруживает легковые автомобили, грузовики, автобусы, мотоциклы и т.п. Модуль 38 обнаружения полос движения обнаруживает полосы движения на дороге из изображений, захваченных посредством камер.
[0017] Модуль 39 обнаружения типов дорог обнаруживает тип дороги из информации, полученной из навигационного устройства. Модуль 40 обнаружения информации дорожного движения обнаруживает информацию дорожного движения из информации, полученной посредством навигационного устройства. Следует отметить, что различные фрагменты информации могут обнаруживаться посредством связи между транспортными средствами или связи между транспортным средством и дорогой либо могут обнаруживаться посредством использования сонаров и т.п. Данные, обнаруженные посредством модуля 3 обнаружения состояния окрестностей, выводятся в модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения, проиллюстрированные на фиг. 1.
[0018] Модуль 4 определения сопоставленных с конкретным человеком характеристик вождения, модуль 8 определения характеристик автоматического вождения
Модуль 4 определения сопоставленных с конкретным человеком характеристик вождения включает в себя модуль 5 распознавания вождения вручную и модуль 6 задания характеристик вождения вручную. Модуль 8 определения характеристик автоматического вождения включает в себя модуль 9 распознавания автоматического вождения и модуль 10 задания характеристик автоматического вождения.
[0019] Модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения определяют тип дороги, по которой движется транспортное средство, из различных фрагментов данных (данных, полученных посредством датчиков, проиллюстрированных на фиг. 3), указывающих состояния движения и обнаруженных в модуле 1 обнаружения состояния движения при вождении вручную, и распознает характеристики вождения человека, занимающего место в транспортном средстве, для каждого типа дороги. Характеристики вождения включают в себя скорость транспортного средства, среднюю скорость транспортного средства, ускорение, угловую скорость относительно вертикальной оси, время торможения, время смены полосы движения, точки слияния и скорость слияния после въезда на скоростную автомагистраль и т.п. в случае, если человек, занимающий место в транспортном средстве (например, водитель), осуществляет вождение вручную транспортного средства. Выполнение автоматического вождения на основе распознаваемых характеристик вождения инструктирует автоматическому вождению выполняться на основе характеристик человека, занимающего место в транспортном средстве, и некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве, при автоматическом вождении, может уменьшаться. Следует отметить, что распознаваемые характеристики вождения, например, в случае скорости транспортного средства, могут представлять собой одно значение, к примеру, скорость транспортного средства в 50 км/ч, или диапазон, к примеру, 30-60 км/ч. Кроме того, характеристики вождения могут выражаться посредством использования функции, такой как распределение плотности вероятностей. Следует отметить, что когда человек, занимающий место в транспортном средстве, инструктирует изменение характеристик вождения во время автоматического вождения, модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения могут распознавать инструктированные характеристики вождения и отражать инструктированные характеристики вождения в характеристиках вождения для автоматического вождения далее.
[0020] Три способа распознавания являются общеизвестными в качестве способов для распознавания характеристик вождения. Фиг. 5 является пояснительным видом, иллюстрирующим три способа распознавания. В способе 1 распознавания, распознавание выполняется посредством человеческого анализа. В способе 2 распознавания, гипотезы задаются на основе человеческих знаний и опыта, и затем распознавание выполняется посредством машинного обучения. В способе 3 распознавания, распознавание полностью и автоматически выполняется посредством машинного обучения. В варианте осуществления, распознавание выполняется со способом 2 распознавания, используемым в качестве примера.
[0021] Фиг. 6 является пояснительным видом, иллюстрирующим последовательность операций распознавания характеристик из данных, обнаруженных посредством модуля 1 обнаружения состояния движения. Во-первых, на этапе a1, модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения собирают фрагменты данных из модуля 1 обнаружения состояния движения. Состояние движения и состояние окрестностей рассматриваемого транспортного средства собираются в качестве фрагментов данных. После сбора фрагментов данных на этапе a2, модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения извлекают необходимые фрагменты данных атрибутов. Не все фрагменты данных, собранные посредством модуля 1 обнаружения состояния движения, обязательно связаны с действием при вождении, и когда фрагменты данных, не связанные с действием при вождении, используются в качестве материалов для распознавания, такие фрагменты данных могут иметь отрицательные эффекты на результат распознавания. Соответственно, только необходимые фрагменты данных (данных атрибутов) извлекаются при обработке этапа a2.
[0022] На этапе a3, модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения корректируют фрагменты данных атрибутов, извлеченных в вышеуказанной обработке этапа a2, посредством удаления элементов, таких как шум, которые включены во фрагменты данных атрибутов и которые имеют отрицательные эффекты на распознавание.
[0023] На этапе a4, модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения классифицируют фрагменты данных атрибутов на значимые элементы (параметры). Фиг. 8 иллюстрирует пример, в котором фрагменты данных по другим транспортным средствам классифицируются на значимые элементы.
[0024] В частности, когда объекты 1-n, которые представляют собой другие транспортные средства, обнаруживаются, и "тип", "перемещение", "стоп-сигнал" и "расстояние от рассматриваемого транспортного средства" каждого из других транспортных средств обнаруживается, модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения повторно классифицируют эти фрагменты данных и получают различные элементы, такие как "число едущих впереди транспортных средств", "число едущих впереди грузовиков" и "расстояние до каждого едущего впереди транспортного средства".
[0025] Вышеуказанная обработка на этапах a1-a4 по фиг. 6 задается как предварительная обработка, и на этапе a5, модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения выполняют машинное обучение при использовании параметров, сформированных в предварительной обработке, в качестве вводов машинного обучения. Например, SOM (самоорганизующаяся карта), SVC (классификация на основе методов опорных векторов), SGD (стохастический градиентный спуск), логистическая регрессия и т.п. может использоваться в качестве алгоритма машинного обучения.
[0026] Тип дороги, по которой движется рассматриваемое транспортное средство, выводится посредством этого машинного обучения. Дороги классифицируются на различные типы дорог (например, b1-b8), как проиллюстрировано на фиг. 7. В частности, когда рассматриваемое транспортное средство движется по скоростной автомагистрали, "b1. Скоростная автомагистраль" задается, при движении по нормальной дороге с двумя полосами движения на каждой стороне, "b2. Магистральная дорога" задается, при движении по нормальной дороге с одной полосой движения на каждой стороне, "b3. Немагистральная дорога" задается, и при движении на перекрестке нормальной дороги, "b4. Перекресток" задается. Кроме того, когда рассматриваемое транспортное средство движется по нормальной дороге или скоростной автомагистрали, и отсутствуют едущие впереди транспортные средства, "b5. Движение в режиме оптимального регулирования скорости" задается, когда рассматриваемое транспортное средство движется по нормальной дороге или скоростной автомагистрали, и имеется едущее впереди транспортное средство, "b6. Движение в режиме следования" задается, когда рассматриваемое транспортное средство останавливается на перекрестке нормальной дороги и затем повторно трогается с места, "b7. Проезд перекрестка" задается, и когда рассматриваемое транспортное средство поворачивает направо на перекрестке нормальной дороги, "b8. Правый поворот" задается.
[0027] На этапе a6, модуль 9 распознавания автоматического вождения и модуль 5 распознавания вождения вручную сохраняют тип дороги, определенный посредством распознавания и характеристик вождения в этом типе дороги, в базе 7 данных характеристик вождения.
Фиг. 9 является пояснительным видом, иллюстрирующим обработку, в которой модуль 9 распознавания автоматического вождения и модуль 5 распознавания вождения вручную сохраняют характеристики автоматического вождения и характеристики вождения вручную в базе 7 данных характеристик вождения, например, в окружении, в котором рассматриваемое транспортное средство движется в режиме оптимального регулирования скорости по дороге с двумя полосами движения. На этапе c1 по фиг. 9, модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения получают различные фрагменты входной информации из модуля 1 обнаружения состояния движения. В частности, модуль 5 распознавания вождения вручную и модуль 9 распознавания автоматического вождения получают позиционные взаимосвязи с другими транспортными средствами, информацию дороги, такую как ограничение скорости, информацию по движению рассматриваемого транспортного средства и т.п.
[0028] На этапе c2, модуль 9 распознавания автоматического вождения и модуль 5 распознавания вождения вручную выполняют алгоритм машинного обучения на основе полученных фрагментов входной информации, как проиллюстрировано на фиг. 6. Тип дороги, по которой движется рассматриваемое транспортное средство, в силу этого определяется. При автоматическом вождении, на этапах c3-c5, модуль 9 распознавания автоматического вождения получает характеристики автоматического вождения, соответствующие определенному типу дороги, из базы 7 данных характеристик вождения и задает их в качестве характеристик вождения при автоматическом вождении. При вождении вручную, на этапах c6-c8, модуль 5 распознавания вождения вручную распознает характеристики вождения вместе с определенным типом дороги.
[0029] В дальнейшем описываются этапы c3-c5 при автоматическом вождении. На этапе c3, модуль 9 распознавания автоматического вождения получает характеристики автоматического вождения, соответствующие типу дороги, и задает их в качестве характеристик вождения при автоматическом вождении. Например, фиг. 10(A) иллюстрируют случай, в котором в ситуации, в которой рассматриваемое транспортное средство V1 движется в режиме оптимального регулирования скорости в левой полосе движения двухполосной дороги, и другие транспортные средства V2, V3 движутся в правой полосе движения этой дороги, ограничение скорости составляет 80 (км/ч), и скорость движения других транспортных средств V2, V3 составляет 80 (км/ч). Когда скорость движения, которая представляет собой распознаваемые характеристики вождения в этом типе дороги (окружении), составляет 80 (км/ч), т.е. когда человек, занимающий место в транспортном средстве, осуществляет вождение или с очень большой вероятностью должен осуществлять вождение транспортного средства при 80 (км/ч) в этом окружении, модуль 9 распознавания автоматического вождения задает скорость движения рассматриваемого транспортного средства V1 равной 80 (км/ч).
[0030] На этапе c4, модуль 9 распознавания автоматического вождения распознает характеристики вождения также во время автоматического вождения. Когда человек, занимающий место в транспортном средстве, инструктирует изменение характеристик вождения во время автоматического вождения, модуль 9 распознавания автоматического вождения может распознавать инструктированные характеристики вождения. Инструкция человека, занимающего место в транспортном средстве, при автоматическом вождении в силу этого может отражаться в характеристиках вождения для автоматического вождения далее. Затем модуль 9 распознавания автоматического вождения сохраняет характеристики вождения при автоматическом вождении в базе 7 данных характеристик вождения. Кроме того, на этапе c5, модуль 9 распознавания автоматического вождения помечает фрагменты сохраненных данных с типом данной дороги, чтобы упрощать дальнейшее использование.
[0031] Между тем, на этапе c6, модуль 5 распознавания вождения вручную получает характеристики вождения вручную вместе с определенным типом дороги. Например, допустим, что как проиллюстрировано на фиг. 10B, в ситуации, в которой рассматриваемое транспортное средство V1 движется в режиме оптимального регулирования скорости в левой полосе движения двухполосной дороги, и другие транспортные средства V2, V3 движутся в правой полосе движения этой дороги, ограничение скорости составляет 80 (км/ч), и скорость движения других транспортных средств V2, V3 составляет 80 (км/ч). Когда скорость движения рассматриваемого транспортного средства V1 составляет 60 (км/ч) в этом состоянии, модуль 5 распознавания вождения вручную определяет то, что человек, занимающий место в транспортном средстве, имеет тенденцию двигаться на скорости в 75% от ограничения скорости при движении в режиме оптимального регулирования скорости. Следует отметить, что движение в режиме оптимального регулирования скорости в варианте осуществления задается как движение, при котором ситуация, когда время между транспортными средствами (числовое значение, полученное посредством деления расстояния между транспортными средствами на скорость движения) между рассматриваемым транспортным средством и едущим впереди транспортным средством составляет две секунды или больше, продолжается в течение 30 секунд или больше.
[0032] На этапе c7, модуль 5 распознавания вождения вручную сохраняет характеристики вождения, полученные посредством распознавания, в базе 7 данных характеристик вождения. Затем на этапе c8, модуль 5 распознавания вождения вручную помечает фрагменты сохраненных данных с типом данной дороги, чтобы упрощать дальнейшее использование.
Характеристики автоматического вождения при автоматическом вождении рассматриваемого транспортного средства и характеристики вождения вручную при вождении вручную могут в силу этого получаться посредством распознавания и сохраняться в базе 7 данных характеристик вождения.
[0033] Модуль 11 задания параметров переключения
Далее описывается модуль 11 задания параметров переключения, проиллюстрированный на фиг. 1. Модуль 11 задания параметров переключения включает в себя хранилище 12 моделей взаимосвязи некомфортного ощущения и физических величин (хранилище моделей) и модуль 13 управления параметрами. Хранилище 12 моделей взаимосвязи некомфортного ощущения и физических величин сохраняет модели взаимосвязи некомфортного ощущения и физических величин, которые описываются ниже.
[0034] Когда рассматриваемое транспортное средство переключается с вождения вручную на автоматическое вождение на основе текущего состояния движения рассматриваемого транспортного средства и моделей взаимосвязи некомфортного ощущения и физических величин, модуль 13 управления параметрами оценивает некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве, и задает время T1 поддержания, проиллюстрированное на фиг. 2, и время T2 переключения, требуемое для переключения на характеристики автоматического вождения, выполняемого после истечения времени T1 поддержания, в зависимости от оцененного некомфортного ощущения.
[0035] Хранилище 12 моделей взаимосвязи некомфортного ощущения и физических величин
Хранилище 12 моделей взаимосвязи некомфортного ощущения и физических величин сохраняет модели взаимосвязи некомфортного ощущения и физических величин, указывающие взаимосвязи между физическими величинами при движении рассматриваемого транспортного средства и некомфортным ощущением, испытываемым человеком, занимающим место в транспортном средстве. Фиг. 11 является пояснительным видом, иллюстрирующим модели взаимосвязи некомфортного ощущения и физических величин. Согласно известному закону Вебера-Фехнера, как проиллюстрировано на графике 61, известно, что скорость транспортного средства (или расстояние между транспортными средствами) и величина скорости транспортного средства, воспринимаемая человеком, занимающим место в транспортном средстве, изменяются так, как проиллюстрировано посредством кривой Q1. Горизонтальная ось графика 61 представляет скорость транспортного средства (или расстояние между транспортными средствами), и вертикальная ось представляет воспринимаемую величину скорости транспортного средства (или расстояния между транспортными средствами).
[0036] В примере, в котором горизонтальная ось представляет скорость транспортного средства, можно обнаруживать, что чем выше скорость транспортного средства, тем меньше изменение воспринимаемой величины для идентичного изменения скорости транспортного средства. В частности, воспринимаемая величина изменяется с e1 на e2, когда скорость транспортного средства изменяется с d1 (например, 20 (км/ч)) на d2 (например, 40 (км/ч)). Между тем, воспринимаемая величина изменяется с e2 на e3, когда скорость транспортного средства изменяется с d2 на d3 (например, 60 (км/ч)). Другими словами, хотя увеличение скорости составляет 20 (км/ч) в обоих случаях, изменение воспринимаемой величины с e1 на e2 превышает изменение воспринимаемой величины с e2 на e3. Это означает то, что человек, занимающий место в транспортном средстве, ощущает, что большее изменение возникает при увеличении скорости транспортного средства с d1 на d2, чем при увеличении скорости с d2 на d3.
[0037] Между тем, когда горизонтальная ось графика 61 представляет собой расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством, чем меньше расстояние между транспортными средствами, тем больше изменение воспринимаемой величины для идентичного изменения расстояния между транспортными средствами. Это означает то, что например, величина, воспринимаемая человеком, занимающим место в транспортном средстве, в случае, если расстояние между транспортными средствами уменьшается на 5 м с 10 м до 5 м, больше величины в случае, если расстояние между транспортными средствами уменьшается на 5 м с 15 м до 10 м.
[0038] График 62 иллюстрирует взаимосвязи между воспринимаемой величиной скорости транспортного средства и некомфортным ощущением для скорости транспортного средства. Кривая Q2 иллюстрирует характеристики в случае, если ширина дороги является небольшой, и кривая Q3 иллюстрирует характеристики в случае, если ширина дороги является большой. Можно обнаруживать, что чем выше воспринимаемая величина скорости транспортного средства, тем сильнее некомфортное ощущение для скорости транспортного средства, испытываемое человеком, занимающим место в транспортном средстве, и чем меньше ширина дороги, тем сильнее некомфортное ощущение.
[0039] Как проиллюстрировано на графике 63, модель, указывающая взаимосвязи между скоростью транспортного средства и некомфортным ощущением для скорости транспортного средства, формируется на основе кривых Q1, Q2 и Q3. Кривая Q4 иллюстрирует некомфортное ощущение для скорости транспортного средства, испытываемое человеком, занимающим место в транспортном средстве, в случае, если ширина дороги является небольшой, и кривая Q5 иллюстрирует некомфортное ощущение для скорости транспортного средства в случае, если ширина дороги является большой. Можно обнаруживать, что чем выше скорость транспортного средства, тем сильнее некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве, и некомфортное ощущение еще сильнее, когда ширина дороги является небольшой. Изменение некомфортного ощущения в случае, если, например, скорость транспортного средства увеличивается с 20 (км/ч) до 40 (км/ч), превышает изменение некомфортного ощущения в случае, если, например, скорость транспортного средства увеличивается с 40 (км/ч) до 60 (км/ч). Другими словами, хотя увеличение скорости составляет 20 (км/ч) в обоих случаях, изменение некомфортного ощущения при увеличении скорости с 20 (км/ч) до 40 (км/ч) сильнее изменения некомфортного ощущения при увеличении скорости с 40 (км/ч) до 60 (км/ч).
[0040] Кроме того, воспринимаемая величина расстояния между транспортными средствами и некомфортное ощущение для расстояния между транспортными средствами изменяются, как проиллюстрировано посредством кривых Q6 и Q7 графика 64. Кривая Q6 иллюстрирует характеристики в случае, если отсутствуют транспортные средства в смежной полосе движения (в случае, если смежная полоса движения свободна), и кривая Q7 иллюстрирует характеристики в случае, если имеется другое транспортное средство в смежной полосе движения (в случае, если смежная полоса движения занята). Можно обнаруживать, что чем меньше воспринимаемая величина расстояния между транспортными средствами (чем меньше расстояние до левого конца графика кривых Q6 и Q7), тем сильнее некомфортное ощущение для расстояния между транспортными средствами, испытываемое человеком, занимающим место в транспортном средстве. Кроме того, можно обнаруживать, что некомфортное ощущение в случае, если имеется другое транспортное средство в смежной полосе движения, сильнее некомфортного ощущения в случае, если отсутствуют транспортные средства в смежной полосе движения.
[0041] Как проиллюстрировано на графике 65, модель, указывающая взаимосвязи между расстоянием между транспортными средствами и некомфортным ощущением для расстояния между транспортными средствами, формируется на основе кривых Q1, Q6 и Q7. Кривая Q8 иллюстрирует некомфортное ощущение для расстояния между транспортными средствами, испытываемое человеком, занимающим место в транспортном средстве, в случае, если имеется другое транспортное средство в смежной полосе движения, и кривая Q9 иллюстрирует некомфортное ощущение для расстояния между транспортными средствами в случае, если отсутствуют транспортные средства в смежной полосе движения. Можно обнаруживать, что чем меньше расстояние между транспортными средствами, тем сильнее некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве, и некомфортное ощущение еще сильнее, когда имеется другое транспортное средство в смежной полосе движения.
[0042] Модель с вышеуказанными характеристиками в силу этого формируется и сохраняется в хранилище 12 моделей взаимосвязи некомфортного ощущения и физических величин. Изменение некомфортного ощущения в случае, если, например, расстояние между транспортными средствами уменьшается с 15 (м) до 10 (м) меньше изменения некомфортного ощущения в случае, если, например, расстояние между транспортными средствами уменьшается с 10 (м) до 5 (м). Другими словами, хотя уменьшение расстояния между транспортными средствами составляет 5 (м) в обоих случаях, изменение некомфортного ощущения при уменьшении с 15 (м) до 10 (м) меньше изменения некомфортного ощущения при уменьшении с 10 (м) до 5 (м).
[0043] Модуль 13 управления параметрами
Некомфортное ощущение человека, занимающего место в транспортном средстве, вводится в модуль 13 управления параметрами, проиллюстрированный на фиг. 1, посредством извлечения характеристик вождения вручную и характеристик автоматического вождения, сохраненных в базе 7 данных характеристик вождения, согласно типу дороги, определенному посредством машинного обучения, и затем обращения к моделям взаимосвязи некомфортного ощущения и физических величин, как проиллюстрировано на фиг. 12. После этого, модуль 13 управления параметрами задает время T1 поддержания и время T2 переключения, требуемое для переключения с вождения вручную на автоматическое вождение, на основе введенного некомфортного ощущения. Следует отметить, что в варианте осуществления, модели взаимосвязи некомфортного ощущения и физических величин, используемые в хранилище 12 моделей взаимосвязи некомфортного ощущения и физических величин, могут задаваться для каждого типа дороги.
[0044] Ниже описывается способ задания времени T1 поддержания и времени T2 переключения, осуществляемый посредством модуля 13 управления параметрами. В частности, модуль 13 управления параметрами имеет функцию переключающего контроллера, который выполняет управление переключением с вождения вручную на автоматическое вождение. Во-первых, со ссылкой на фиг. 13 и 14, приводится описание изменений скорости транспортного средства и расстояния между транспортными средствами, которые не заставляют человека, занимающего место в транспортном средстве, испытывать некомфортное ощущение.
[0045] Как проиллюстрировано на фиг. 13A, скорость, до которой может увеличиваться скорость транспортного средства в течение определенного времени, определяется в зависимости от скорости транспортного средства. Кривая q1 является графиком, иллюстрирующим взаимосвязи между скоростью транспортного средства и некомфортным ощущением, испытываемым человеком, занимающим место в транспортном средстве. В варианте осуществления, допустимое значение величины изменения некомфортного ощущения за определенное время задается в качестве "допустимой величины X1 изменения (первого порогового значения)". Скорость транспортного средства изменяется таким образом, что величина изменения некомфортного ощущения за определенное время меньше или равна допустимой величине X1 изменения. В частности, когда некомфортное ощущение должно увеличиваться с переключением с вождения вручную на автоматическое вождение, шаблон перехода изменяется таким образом, что величина увеличения некомфортного ощущения за определенное время меньше или равна первому пороговому значению.
[0046] В примере, проиллюстрированном на фиг. 13A, величина изменения некомфортного ощущения в случае, если скорость транспортного средства увеличивается с 20 (км/ч) до 40 (км/ч), является допустимой величиной X1 изменения. Соответственно, когда текущая скорость транспортного средства составляет 20 (км/ч), транспортному средству разрешается ускоряться до 40 (км/ч) за определенное время (см. стрелку Y1).
[0047] Между тем, когда текущая скорость транспортного средства составляет 40 (км/ч), транспортному средству разрешается ускоряться до 100 (км/ч) за определенное время (см. стрелку Y2). Тем не менее, когда текущая скорость транспортного средства составляет 20 (км/ч), транспортному средству не разрешается ускоряться до 100 (км/ч) за определенное время, поскольку величина изменения некомфортного ощущения составляет X1+X1=2X1 и превышает X1.
Кроме того, как проиллюстрировано на фиг. 13B, скорость, до которой скорость транспортного средства может увеличиваться за определенное время, определяется в зависимости от ширины дороги и может варьироваться даже при увеличении скорости с идентичной скорости транспортного средства. Кривая q2 является графиком, иллюстрирующим взаимосвязи скорости транспортного средства и некомфортного ощущения, испытываемого человеком, занимающим место в транспортном средстве, в случае, если ширина дороги является небольшой, и кривая q3 является графиком, иллюстрирующим взаимосвязи в случае, если ширина дороги является большой.
[0048] Как проиллюстрировано посредством кривой q2, когда текущая скорость транспортного средства составляет 20 (км/ч), и ширина дороги является небольшой, транспортному средству разрешается ускоряться до 40 (км/ч) за определенное время (см. стрелку Y3). Между тем, как проиллюстрировано посредством кривой q3, когда текущая скорость транспортного средства составляет 20 (км/ч), и ширина дороги является большой, транспортному средству разрешается ускоряться до 60 (км/ч) за определенное время (см. стрелку Y4).
[0049] Кроме того, как проиллюстрировано на фиг. 14A, расстояние, до которого транспортное средство может приближаться к едущему впереди транспортному средству за определенное время, определяется в зависимости от расстояния между транспортными средствами. Кривая q4 является графиком, иллюстрирующим взаимосвязи между расстоянием между транспортными средствами и некомфортным ощущением, испытываемым человеком, занимающим место в транспортном средстве. В варианте осуществления, допустимое значение величины изменения некомфортного ощущения за определенное время задается в качестве "допустимой величины X2 изменения (первого порогового значения)". Расстояние между транспортными средствами изменяется таким образом, что величина изменения некомфортного ощущения за определенное время меньше или равна допустимой величине X2 изменения.
[0050] В примере, проиллюстрированном на фиг. 14A, величина изменения некомфортного ощущения в случае, если расстояние между транспортными средствами изменяется с 20 (м) до 10 (м), является допустимой величиной X2 изменения. Соответственно, когда текущее расстояние между транспортными средствами составляет 20 (м), транспортному средству разрешается уменьшать расстояние между транспортными средствами до 10 (м) за определенное время (см. стрелку Y5).
Между тем, когда текущее расстояние между транспортными средствами составляет 40 (м), транспортному средству разрешается уменьшать расстояние между транспортными средствами до 20 (м) за определенное время (см. стрелку Y6).
Тем не менее, когда текущее расстояние между транспортными средствами составляет 40 (м), транспортному средству не разрешается уменьшать расстояние между транспортными средствами до 10 (м) за определенное время, поскольку величина изменения некомфортного ощущения составляет X2+X2=2X2 и превышает X2.
[0051] Кроме того, как проиллюстрировано на фиг. 14B, величина уменьшения расстояния между транспортными средствами за определенное время определяется в зависимости от того, имеется или нет другое транспортное средство в смежной полосе движения. Кривая q5 иллюстрирует характеристики в случае, если имеется другое транспортное средство в смежной полосе движения, и кривая q6 иллюстрирует характеристики в случае, если отсутствуют транспортные средства в смежной полосе движения.
[0052] Когда имеется другое транспортное средство в смежной полосе движения, транспортному средству разрешается уменьшать расстояние между транспортными средствами с 20 (м) до 10 (м) за определенное время (см. стрелку Y7). Между тем, когда отсутствуют транспортные средства в смежной полосе движения, транспортному средству разрешается уменьшать расстояние между транспортными средствами с 35 (м) до 10 (м) за определенное время (см. стрелку Y8).
[0053] Модуль 13 управления параметрами задает время T1 поддержания таким образом, что чем сильнее некомфортное ощущение, тем больше время T1 поддержания. Кроме того, когда скорость транспортного средства должна изменяться, модуль 13 управления параметрами задает длину времени T2 переключения таким образом, что величина изменения некомфортного ощущения за определенное время меньше или равна допустимой величине X1 изменения. Кроме того, когда расстояние между транспортными средствами должно изменяться, модуль 13 управления параметрами задает длину времени T2 переключения таким образом, что величина изменения некомфортного ощущения за определенное время меньше или равна допустимой величине X2 изменения (первому пороговому значению). Это позволяет подавлять резкое изменение некомфортного ощущения.
[0054] В частности, чем выше скорость транспортного средства, тем большим задается время T1 поддержания, и чем меньше ширина дороги, тем большим задается время T1 поддержания. Кроме того, чем меньше расстояние между транспортными средствами, тем большим задается время T1 поддержания, и когда имеется другое транспортное средство в смежной полосе движения, время T1 поддержания задается больше.
[0055] Кроме того, шаблон перехода задается таким образом, что чем ниже скорость транспортного средства, тем больше время, требуемое для увеличения скорости (время T2 переключения), и чем меньше ширина дороги, тем больше время, требуемое для увеличения скорости (время T2 переключения). Кроме того, шаблон перехода задается таким образом, что чем меньше расстояние между транспортными средствами, тем больше время, требуемое для того, чтобы приближаться к едущему впереди транспортному средству (время T2 переключения), и когда имеется другое транспортное средство в смежной полосе движения, время, требуемое для того, чтобы приближаться к едущему впереди транспортному средству (время T2 переключения), является большим.
[0056] С другой стороны, в случае если управление выполняется таким образом, что некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве, уменьшается, к примеру, в случае, если характеристики вождения переключаются, чтобы уменьшать скорость транспортного средства, либо в случае, если характеристики вождения переключаются, чтобы увеличивать расстояние между транспортными средствами, шаблон перехода задается таким образом, что темп уменьшения некомфортного ощущения больше или равен предварительно установленному пороговому значению (второму пороговому значению). В частности, когда некомфортное ощущение должно уменьшаться с переключением с вождения вручную на автоматическое вождение, шаблон перехода изменяется таким образом, что темп уменьшения некомфортного ощущения за определенное время больше или равен второму пороговому значению.
[0057] Например, на графике, проиллюстрированном на фиг. 13A, скорость транспортного средства для рассматриваемого транспортного средства уменьшается со 100 (км/ч) до 40 (км/ч) или меньше за определенное время, и величина уменьшения некомфортного ощущения за определенное время в силу этого задается больше X1. В качестве другого примера, скорость транспортного средства для рассматриваемого транспортного средства уменьшается с 40 (км/ч) до 20 (км/ч) или меньше за определенное время, и величина уменьшения некомфортного ощущения за определенное время в силу этого задается больше X1. Другими словами, управление выполняется таким образом, что темп уменьшения некомфортного ощущения больше или равен второму пороговому значению, чтобы быстро исключать некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве.
[0058] Кроме того, также для расстояния между транспортными средствами, на графике, проиллюстрированном на фиг. 14A, например, расстояние между транспортными средствами увеличивается с 10 (м) до 20 (м) или больше за определенное время, и величина уменьшения некомфортного ощущения за определенное время в силу этого задается больше X2. В качестве другого примера, расстояние между транспортными средствами увеличивается с 20 (м) до 40 (м) или больше за определенное время, и величина уменьшения некомфортного ощущения за определенное время в силу этого задается больше X2.
[0059] В частности, шаблон перехода задается таким образом, что чем выше скорость транспортного средства, тем меньше время, требуемое для уменьшения скорости (время T2 переключения), и чем больше ширина дороги, тем меньше время, требуемое для уменьшения скорости (время T2 переключения). Кроме того, шаблон перехода задается таким образом, что чем больше расстояние между транспортными средствами, тем меньше время отъезда от едущего впереди транспортного средства (время T2 переключения), и когда отсутствуют транспортные средства в смежной полосе движения, время отъезда от едущего впереди транспортного средства (время T2 переключения) меньше.
[0060] Как описано выше, во время переключения с вождения вручную на автоматическое вождение, модуль 13 управления параметрами вычисляет время T1 поддержания и также вычисляет время T2 переключения на выполнение автоматического вождения. Кроме того, модуль 13 управления параметрами задает шаблон перехода характеристик вождения во время T2 переключения.
[0061] Фиг. 15 является видом, иллюстрирующим пример задания времени T1 поддержания и времени T2 переключения. Фиг. 15 иллюстрирует способ задания T1 в случае, если управляющий параметр, для которого испытывает некомфортное ощущение человек, занимающий место в транспортном средстве, представляет собой скорость транспортного средства, и скорость должна увеличиваться, и способ задания T1 в случае, если управляющий параметр представляет собой расстояние между транспортными средствами, и расстояние между транспортными средствами должно уменьшаться.
[0062] Когда текущая скорость транспортного средства является низкой, T1 задается небольшим, и время T2 переключения задается большим, чтобы не допускать резкого увеличения скорости с низкой скорости и уменьшать некомфортное ощущение человека, занимающего место в транспортном средстве. Когда текущая скорость транспортного средства является высокой, T1 задается большим, и время T2 переключения задается небольшим, чтобы быстро увеличивать скорость. Некомфортное ощущение человека, занимающего место в транспортном средстве, может в силу этого уменьшаться. Кроме того, когда ширина дороги является небольшой, T1 задается большим, и T2 задается большим, чтобы постепенно уменьшать расстояние между транспортными средствами и уменьшать некомфортное ощущение человека, занимающего место в транспортном средстве. Когда ширина дороги является большой, T1 задается небольшим, и T2 задается небольшим, чтобы быстро увеличивать скорость.
[0063] Кроме того, когда текущее расстояние между транспортными средствами является небольшим, T1 задается большим, и T2 задается большим, чтобы увеличивать время, требуемое для того, чтобы уменьшать расстояние между транспортными средствами, за счет этого не допуская резкого приближения к едущему впереди транспортному средству и уменьшая некомфортное ощущение человека, занимающего место в транспортном средстве. Кроме того, когда текущее расстояние между транспортными средствами является большим, T1 задается небольшим, и T2 задается небольшим, чтобы быстро уменьшать расстояние между транспортными средствами. Кроме того, когда имеется другое транспортное средство в смежной полосе движения, T1 задается большим, и T2 задается большим, чтобы уменьшать некомфортное ощущение человека, занимающего место в транспортном средстве. Когда отсутствуют транспортные средства в смежной полосе движения, T1 задается небольшим, и T2 задается небольшим, чтобы быстро уменьшать расстояние между транспортными средствами.
Задание времени T1 поддержания и времени T2 переключения, как описано выше, обеспечивает переключение характеристик вождения при уменьшении некомфортного ощущения, испытываемого человеком, занимающим место в транспортном средстве. Как результат, может не допускаться случай, в котором человек, занимающий место в транспортном средстве, испытывает некомфортное ощущение.
[0064] Далее описываются другие способы задания времени T2 переключения. Фиг. 16 является пояснительным видом, иллюстрирующим способ задания времени T2 переключения в случае, если скорость транспортного средства должна изменяться. При увеличении скорости, может предотвращаться превышение, посредством рывка (темпа изменения ускорения), определенного значения, чтобы предотвращать испытывание некомфортного ощущения человеком, занимающим место в транспортном средстве. Соответственно, как проиллюстрировано на фиг. 16A, определяется изогнутая линия q21, на которой задаются секции рывка, и максимальный рывок и минимальный рывок в этих секциях рывка задаются. В этом случае, предпочтительно, если секция максимального рывка, секция минимального рывка и секция, в которой рывок равен нулю, имеют идентичную длину.
[0065] Затем изогнутая линия q21 интегрируется, чтобы получать изогнутую линию q22, указывающую ускорение, как проиллюстрировано на фиг. 16B. После этого, изогнутая линия q22 интегрируется, чтобы получать кривую q23, указывающую скорость, как проиллюстрировано на фиг. 16C. Кривая q23 задается таким образом, что изменение скорости с текущей скорости на целевую скорость формирует плавную S-образную кривую. Кроме того, время, которое требуется транспортному средству для того, чтобы достигать целевой скорости от текущей скорости, задается в качестве времени T2 переключения.
Задание времени T2 переключения в этом способе обеспечивает увеличение скорости, которое не вызывает ощущение чрезмерного ускорения у человека, занимающего место в транспортном средстве.
[0066] Фиг. 17 является пояснительным видом, иллюстрирующим способ задания времени T2 переключения в случае, если скорость транспортного средства должна увеличиваться на 20 (км/ч). Фиг. 17A и 17B иллюстрируют случай, в котором скорость транспортного средства увеличивается с 40 (км/ч) до 60 (км/ч). Как проиллюстрировано на фиг. 17B, когда текущая скорость транспортного средства является низкой, модуль 13 управления параметрами задает время T2 переключения большим в дополнение к заданию времени T1 поддержания небольшим.
[0067] Между тем, фиг. 17C и 17D иллюстрируют случай, в котором скорость транспортного средства увеличивается с 80 (км/ч) до 100 (км/ч). Когда текущая скорость транспортного средства является высокой, как проиллюстрировано на фиг. 17D, модуль 13 управления параметрами задает время T2 переключения небольшим в дополнение к заданию времени T1 поддержания большим. Это позволяет уменьшать некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве. В частности, во время переключения с вождения вручную на автоматическое вождение, некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве, в начале автоматического вождения в случае, если скорость транспортного средства составляет 80 (км/ч), сильнее некомфортного ощущения в случае, если скорость транспортного средства составляет 40 (км/ч). Кроме того, в то время, когда характеристики вождения изменяются с характеристик вождения вручную на характеристики автоматического вождения после переключения на автоматическое вождение, изменение характеристик вождения увеличивает некомфортное ощущение человека, занимающего место в транспортном средстве. Соответственно, предпочтительно уменьшать некомфортное ощущение человека, занимающего место в транспортном средстве, до того, как начинается изменение характеристик вождения с характеристик вождения вручную. В частности, задание времени T1 поддержания большим по мере того, как скорость транспортного средства становится более высокой, позволяет уменьшать некомфортное ощущение человека, занимающего место в транспортном средстве, до окончания времени поддержания. Соответственно, можно подавлять чрезмерное увеличение некомфортного ощущения человека, занимающего место в транспортном средстве, в то время, когда характеристики вождения изменяются на характеристики автоматического вождения.
Кроме того, даже при идентичном увеличении скорости в 20 (км/ч), некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве, при увеличении скорости с 40 (км/ч) до 60 (км/ч), сильнее некомфортного ощущения при увеличении скорости с 80 (км/ч) до 100 (км/ч). Соответственно, время T2 переключения задается больше при увеличении скорости с 40 (км/ч) до 60 (км/ч), чтобы уменьшать некомфортное ощущение.
[0068] Фиг. 18 является пояснительным видом, иллюстрирующим способ задания времени T2 переключения в случае, если скорость транспортного средства должна увеличиваться с 40 (км/ч) до 60 (км/ч). Фиг. 18A иллюстрирует случай, в котором рассматриваемое транспортное средство V1 движется по дороге с небольшой шириной H1 дороги. Когда ширина дороги является небольшой, как проиллюстрировано на фиг. 18B, модуль 13 управления параметрами задает время T2 переключения большим в дополнение к заданию времени T1 поддержания большим.
[0069] Между тем, фиг. 18C и 18D иллюстрируют случай, в котором ширина H2 дороги для дороги, по которой движется рассматриваемое транспортное средство, является большой. Когда ширина дороги является большой, как проиллюстрировано на фиг. 17D, модуль 13 управления параметрами задает время T2 переключения небольшим в дополнение к заданию времени T1 поддержания небольшим. Это позволяет уменьшать некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве. В частности, даже при идентичном увеличении скорости с 40 (км/ч) до 60 (км/ч), некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве, в случае, если ширина дороги является небольшой, сильнее, и T1 и T2 в силу этого задаются больше в этом случае, чтобы уменьшать некомфортное ощущение.
[0070] Фиг. 19 является пояснительным видом, иллюстрирующим способ задания времени T2 переключения в случае, если расстояние между транспортными средствами должно уменьшаться на 30 (м). Фиг. 19A и 19B иллюстрируют случай, в котором расстояние между транспортными средствами должно изменяться с 50 (м) до 20 (м). Когда текущее расстояние между транспортными средствами является небольшим, как проиллюстрировано на фиг. 19B, модуль 13 управления параметрами задает время T2 переключения большим в дополнение к заданию времени T1 поддержания большим.
[0071] Между тем, фиг. 19C и 19D иллюстрируют случай, в котором расстояние между транспортными средствами должно изменяться с 100 (м) до 70 (м). Когда текущее расстояние между транспортными средствами является большим, как проиллюстрировано на фиг. 19D, модуль 13 управления параметрами задает время T2 переключения небольшим в дополнение к заданию времени T1 поддержания небольшим. Это позволяет уменьшать некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве. В частности, даже при идентичном приближении в 30 (м), некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве, при приближении с 50 (м) до 20 (м), сильнее некомфортного ощущения при приближении с 100 (м) до 70 (м). Соответственно, T1 и T2 задаются больше при приближении с 50 (м) до 20 (м), чтобы уменьшать некомфортное ощущение.
[0072] Фиг. 20 является пояснительным видом, иллюстрирующим способ задания времени T2 переключения в случае, если расстояние между транспортными средствами должно уменьшаться с 80 (м) до 50 (м). Фиг. 20A и 20B иллюстрируют случай, в котором имеется другое транспортное средство в смежной полосе движения. Когда имеется другое транспортное средство в смежной полосе движения, как проиллюстрировано на фиг. 20B, модуль 13 управления параметрами задает время T2 переключения большим в дополнение к заданию времени T1 поддержания большим.
[0073] Между тем, фиг. 20C и 20D иллюстрируют случай, в котором отсутствуют транспортные средства в смежной полосе движения. Когда отсутствуют транспортные средства в смежной полосе движения, как проиллюстрировано на фиг. 20D, модуль 13 управления параметрами задает время T2 переключения небольшим в дополнение к заданию времени T1 поддержания небольшим. Это позволяет уменьшать некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве. В частности, даже при идентичном приближении с 80 (м) до 50 (м), некомфортное ощущение, испытываемое человеком, занимающим место в транспортном средстве, в случае, если имеется другое транспортное средство в смежной полосе движения, сильнее. Соответственно, T1 и T2 задаются больше в этом случае, с тем чтобы уменьшать некомфортное ощущение.
[0074] Кроме того, когда рассматриваемое транспортное средство останавливается на светофоре и т.п. до того, как полное время (T1+T2) из времени T1 поддержания и времени T2 переключения истекает, модуль 13 управления параметрами, проиллюстрированный на фиг. 1, переключает характеристики вождения на характеристики автоматического вождения при повторном трогании с места после остановки без использования моделей взаимосвязи некомфортного ощущения и физических величин.
В частности, как проиллюстрировано на фиг. 21, когда вождение переключается с вождения вручную на автоматическое вождение в момент, когда рассматриваемое транспортное средство V1 проезжает точку P1, характеристики вождения вручную поддерживаются в дальнейшем. После этого, когда рассматриваемое транспортное средство V1 останавливается в точке P2, характеристики вождения затем переключаются на характеристики автоматического вождения. Это позволяет не допускать необязательного переключения характеристик вождения.
[0075] Описание операции обработки
Далее описывается пример операции обработки устройства управления в транспортном средстве с функцией автоматического вождения согласно варианту осуществления со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 22.
Во-первых, на этапе S11, модуль 3 обнаружения состояния окрестностей обнаруживает состояние окрестностей рассматриваемого транспортного средства. На этапе S12, модуль 9 распознавания автоматического вождения статистически распознает обнаруженное состояние окрестностей и затем, на этапе S13, классифицирует текущее состояние движения. В частности, модуль 9 распознавания автоматического вождения классифицирует текущее состояние движения на одно из состояний движения, к примеру, на движение по скоростной автомагистрали и движение по нормальной дороге, как проиллюстрировано на фиг. 7.
[0076] На этапе S14, модуль 10 задания характеристик автоматического вождения задает характеристики автоматического вождения на основе текущего состояния движения посредством обращения к базе 7 данных характеристик вождения.
Одновременно, на этапе S15, модуль 2 обнаружения состояния рассматриваемого транспортного средства обнаруживать текущее состояние рассматриваемого транспортного средства, как проиллюстрировано на фиг. 3. На этапе S16, модуль 5 распознавания вождения вручную статистически распознает характеристики вождения человека, занимающего место в транспортном средстве, и, на этапе S17, задает характеристики вождения вручную в зависимости от состояния движения. Кроме того, характеристики вождения, распознаваемые в модуле 5 распознавания вождения вручную, сохраняются в базе 7 данных характеристик вождения.
[0077] На этапе S18, модуль 13 управления параметрами определяет то, возникает или нет операция переключения с вождения вручную на автоматическое вождение (перехват управления).
[0078] На этапе S19, модуль 13 управления параметрами определяет то, отличаются или нет характеристики вождения вручную, заданные в обработке этапа S17, от характеристик автоматического вождения, заданных в обработке этапа S14. Когда характеристики вождения вручную не отличаются ("Нет" на этапе S19), человек, занимающий место в транспортном средстве, не ощущает некомфортного ощущения во время переключения. Соответственно, переход к управлению автоматическим вождением в характеристиках автоматического вождения выполняется как есть.
[0079] Когда характеристики вождения вручную отличаются ("Да" на этапе S19), на этапе S20, модуль 13 управления параметрами обращается к хранилищу 12 моделей взаимосвязи некомфортного ощущения и физических величин и, на этапе S21, задает время T1 поддержания и время T2 переключения посредством использования вышеуказанного способа.
Затем на этапе S22, модуль 13 управления параметрами выполняет автоматическое управление вождением посредством использования характеристик вождения вручную.
[0080] На этапе S23, модуль 13 управления параметрами определяет то, истекает или нет T1. Когда T1 истекает ("Да" на этапе S23), на этапе S24, модуль 13 управления параметрами постепенно переключает характеристики вождения с характеристик вождения вручную на характеристики автоматического вождения.
На этапе S25, модуль 13 управления параметрами определяет то, истекает или нет T2. Когда T2 истекает ("Да" на этапе S25), модуль 13 управления параметрами выполняет управление автоматическим вождением.
[0081] Как описано выше, когда операция переключения с вождения вручную на автоматическое вождение возникает, переключение вождения может выполняться без принудительного испытывания некомфортного ощущения человеком, занимающим место в транспортном средстве, посредством соответствующего задания времени T1 поддержания и времени T2 переключения.
[0082] Как описано выше, в варианте осуществления, когда вождение переключается с вождения вручную на автоматическое вождение, автоматическое вождение выполняется с поддерживаемыми характеристиками вождения вручную, причем характеристики вождения вручную представляют собой характеристики вождения при вождении вручную. Соответственно, можно не допускать случая, в котором человек, занимающий место в транспортном средстве, испытывает некомфортное ощущение.
[0083] Кроме того, время T1 поддержания (время поддержания вождения вручную) задается таким образом, чтобы поддерживать характеристики вождения вручную в течение времени T1 поддержания, и затем переключение на характеристики автоматического вождения выполняется. Соответственно, можно не допускать случая, в котором человек, занимающий место в транспортном средстве, испытывает некомфортное ощущение.
[0084] Кроме того, время T1 поддержания задается на основе взаимосвязей между физическими величинами (скоростью транспортного средства, расстоянием между транспортными средствами и т.п.) транспортного средства с функцией автоматического вождения и некомфортным ощущением человека, занимающего место в транспортном средстве. Соответственно, можно задавать соответствующее время T1 поддержания в зависимости от состояния движения транспортного средства с функцией автоматического вождения.
[0085] Кроме того, когда скорость транспортного средства является высокой, и человек, занимающий место в транспортном средстве, с большей вероятностью должен испытывать некомфортное ощущение, время T1 поддержания задается большим. Соответственно, можно более надлежащим образом задавать время T1 поддержания и не допускать случая, в котором человек, занимающий место в транспортном средстве, испытывает некомфортное ощущение.
[0086] Кроме того, когда ширина дороги является небольшой, и человек, занимающий место в транспортном средстве, с большей вероятностью должен испытывать некомфортное ощущение, время T1 поддержания задается большим. Соответственно, можно более надлежащим образом задавать время T1 поддержания и не допускать случая, в котором человек, занимающий место в транспортном средстве, испытывает некомфортное ощущение.
[0087] Кроме того, когда расстояние между транспортными средствами является небольшим, и человек, занимающий место в транспортном средстве, с большей вероятностью должен испытывать некомфортное ощущение, время T1 поддержания задается большим. Соответственно, можно более надлежащим образом задавать время T1 поддержания и не допускать случая, в котором человек, занимающий место в транспортном средстве, испытывает некомфортное ощущение.
[0088] Кроме того, когда имеется другое транспортное средство в смежной полосе движения, и человек, занимающий место в транспортном средстве, с большей вероятностью должен испытывать некомфортное ощущение, время T1 поддержания задается большим. Соответственно, можно более надлежащим образом задавать время T1 поддержания и не допускать случая, в котором человек, занимающий место в транспортном средстве, испытывает некомфортное ощущение.
[0089] Кроме того, время T1 поддержания задается на основе некомфортного ощущения, испытываемого человеком, занимающим место в транспортном средстве. Соответственно, характеристики вождения вручную могут поддерживаться без испытывания сильного некомфортного ощущения человеком, занимающим место в транспортном средстве.
[0090] Кроме того, автоматическое вождение выполняется с поддержанием характеристик вождения при вождении вручную, и затем автоматическое вождение выполняется на основе характеристик автоматического вождения, отличающихся от характеристик вождения вручную. Соответственно, переключение на характеристики автоматического вождения может выполняться без испытывания некомфортного ощущения человеком, занимающим место в транспортном средстве.
[0091] Кроме того, переключение с характеристик вождения вручную на характеристики автоматического вождения постепенно выполняется. Соответственно, некомфортное ощущение, вызываемое у человека, занимающего место в транспортном средстве, может подавляться.
[0092] Кроме того, переход от характеристик вождения вручную к характеристикам автоматического вождения выполняется таким образом, что величина увеличения некомфортного ощущения за определенное время меньше или равна первому пороговому значению. Соответственно, некомфортное ощущение вследствие резких изменений характеристик вождения может подавляться.
[0093] Кроме того, когда скорость транспортного средства является низкой, и человек, занимающий место в транспортном средстве, с большей вероятностью должен испытывать некомфортное ощущение, переход от характеристик вождения вручную к характеристикам автоматического вождения выполняется таким образом, что время, требуемое для увеличения скорости (время T2 переключения характеристик вождения), является большим. Соответственно, можно надлежащим образом задавать время T2 переключения характеристик вождения и подавлять резкое изменение некомфортного ощущения.
[0094] Кроме того, когда ширина дороги является небольшой, и человек, занимающий место в транспортном средстве, с большой вероятностью должен испытывать некомфортное ощущение, переход от характеристик вождения вручную к характеристикам автоматического вождения выполняется таким образом, что время, требуемое для увеличения скорости (время T2 переключения характеристик вождения), является большим. Соответственно, можно надлежащим образом задавать время T2 переключения характеристик вождения и подавлять резкое изменение некомфортного ощущения.
[0095] Кроме того, когда расстояние между транспортными средствами является небольшим, и человек, занимающий место в транспортном средстве, с большой вероятностью должен испытывать некомфортное ощущение, переход от характеристик вождения вручную к характеристикам автоматического вождения выполняется таким образом, что время, требуемое для того, чтобы приближаться к едущему впереди транспортному средству (время T2 переключения характеристик вождения), является большим. Соответственно, можно надлежащим образом задавать время T2 переключения характеристик вождения и подавлять резкое изменение некомфортного ощущения.
[0096] Кроме того, когда имеется другое транспортное средство в смежной полосе движения, и человек, занимающий место в транспортном средстве, с большой вероятностью должен испытывать некомфортное ощущение, переход от характеристик вождения вручную к характеристикам автоматического вождения выполняется таким образом, что время, требуемое для того, чтобы приближаться к едущему впереди транспортному средству (время T2 переключения характеристик вождения), является большим. Соответственно, можно надлежащим образом задавать время T2 переключения характеристик вождения и подавлять резкое изменение некомфортного ощущения.
[0097] Кроме того, переход от характеристик вождения вручную к характеристикам автоматического вождения выполняется таким образом, что величина уменьшения некомфортного ощущения за определенное время больше или равна второму пороговому значению. Соответственно, характеристики вождения могут быстро переключаться.
[0098] Кроме того, переход от характеристик вождения вручную к характеристикам автоматического вождения выполняется таким образом, что чем выше скорость транспортного средства, тем меньше время, требуемое для уменьшения скорости (время T2 переключения характеристик вождения). Соответственно, можно быстро выполнять переключение и надлежащим образом задавать время T2 переключения характеристик вождения.
[0099] Кроме того, переход от характеристик вождения вручную к характеристикам автоматического вождения выполняется таким образом, что чем больше ширина дороги, тем меньше время, требуемое для уменьшения скорости (время T2 переключения характеристик вождения). Соответственно, можно быстро выполнять переключение и надлежащим образом задавать время T2 переключения характеристик вождения.
[0100] Кроме того, переход от характеристик вождения вручную к характеристикам автоматического вождения выполняется таким образом, что чем больше расстояние между транспортными средствами, тем меньше время, требуемое для того, чтобы отъезжать от едущего впереди транспортного средства (время T2 переключения характеристик вождения). Соответственно, можно быстро выполнять переключение и надлежащим образом задавать время T2 переключения характеристик вождения.
[0101] Кроме того, переход от характеристик вождения вручную к характеристикам автоматического вождения выполняется таким образом, что когда отсутствуют транспортные средства в смежной полосе движения, время, требуемое для того, чтобы отъезжать от едущего впереди транспортного средства (время T2 переключения характеристик вождения), является небольшим. Соответственно, можно быстро выполнять переключение и надлежащим образом задавать время T2 переключения характеристик вождения.
[0102] Кроме того, когда транспортное средство переключается с вождения вручную на автоматическое вождение, определяется то, остановлено или нет транспортное средство. Когда определяется то, что транспортное средство остановлено, переход от характеристик вождения вручную к характеристикам автоматического вождения выполняется без задания времени T1 поддержания и времени T2 переключения. Соответственно, может не допускаться необязательное вычисление.
[0103] Описание модифицированного примера
Далее описывается модифицированный пример варианта осуществления. Фиг. 23 является пояснительным видом, иллюстрирующим модифицированный пример. Как проиллюстрировано на фиг. 23, когда рассматриваемое транспортное средство V1 движется по дороге с последовательностью изгибов, операция торможения выполняется перед каждым изгибом. Время операции торможения при движении при вождении вручную может варьироваться относительно времени операции торможения при движении на основе характеристик автоматического вождения. На фиг. 23, ссылки с номерами x1-x5 обозначают время операции торможения на основе характеристик автоматического вождения. Кроме того, ссылки с номерами w1-w5 обозначают время фактической операции торможения. В этом случае, время операции торможения является физической величиной рассматриваемого транспортного средства.
[0104] Когда операция переключения с вождения вручную на автоматическое вождение выполняется в момент t0 времени, операция торможения выполняется в ссылке с номером w1, которая представляет собой время операции торможения на основе характеристик вождения вручную. В этом случае, ссылка с номером w1 имеет разность Δt1 времен относительно опорного значения x1, которое представляет собой время на основе характеристик автоматического вождения. Разность Δt1 времен поддерживается во время T1 поддержания. В частности, разность времен между ссылками с номерами w2 и x2 составляет Δt1.
[0105] Во время T2 переключения, разность времен постепенно уменьшается, к примеру, разности Δt2 (<Δt1) и Δt3 (<Δt2) времен. Затем, после того, как время T2 переключения истекает, ссылки с номерами w5 и x5 задаются таким образом, что они совпадают друг с другом. Переключение с вождения вручную на вождение на основе характеристик автоматического вождения может в силу этого выполняться без принудительного испытывания некомфортного ощущения человеком, занимающим место в транспортном средстве.
[0106] Хотя выше описываются способ управления и устройство управления транспортного средства с функцией автоматического вождения настоящего изобретения на основе проиллюстрированного варианта осуществления, настоящее изобретение не ограничено вариантом осуществления. Конфигурация каждой части может быть заменена посредством любой конфигурации, имеющей аналогичную функцию.
Список ссылочных обозначений
[0107] 1 - модуль обнаружения состояния движения
2 - модуль обнаружения состояния рассматриваемого транспортного средства
3 - модуль обнаружения состояния окрестностей
4 - модуль определения сопоставленных с конкретным человеком характеристик вождения
5 - модуль распознавания вождения вручную
6 - модуль задания характеристик вождения вручную
7 - база данных характеристик вождения
8 - модуль определения характеристик автоматического вождения
9 - модуль распознавания автоматического вождения
10 - модуль задания характеристик автоматического вождения
11 - модуль задания параметров переключения
12 - хранилище моделей взаимосвязи некомфортного ощущения и физических величин (хранилище моделей)
13 - модуль управления параметрами
32 - датчик скорости транспортного средства
33 - датчик ускорения
34 - датчик угла поворота при рулении
35 - модуль обнаружения пространств между транспортными средствами
36 - модуль обнаружения объектов, отличных от транспортных средств
37 - модуль обнаружения типов окружающих транспортных средств
38 - модуль обнаружения полос движения
39 - модуль обнаружения типов дорог
40 - модуль обнаружения информации дорожного движения
T1 - время поддержания характеристик вождения вручную (время поддержания)
T2 - время переключения характеристик вождения (время переключения)
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВОЖДЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ | 2016 |
|
RU2712491C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ | 2017 |
|
RU2702931C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЖДЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ | 2016 |
|
RU2699205C1 |
| СПОСОБ ПОМОЩИ ПРИ ДВИЖЕНИИ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ | 2017 |
|
RU2720862C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМОТОРОМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОПРИВОДОМ | 2018 |
|
RU2729837C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОПОРНОЙ СКОРОСТЬЮ РЕГУЛЯТОРА СКОРОСТИ НА СПУСКЕ | 2013 |
|
RU2610065C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 2017 |
|
RU2735966C2 |
| СПОСОБ УПРАВЛЕНИЯ (ВАРИАНТЫ) И УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ АВТОМАТИЧЕСКИ УПРАВЛЯЕМОГО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2704053C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2561478C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
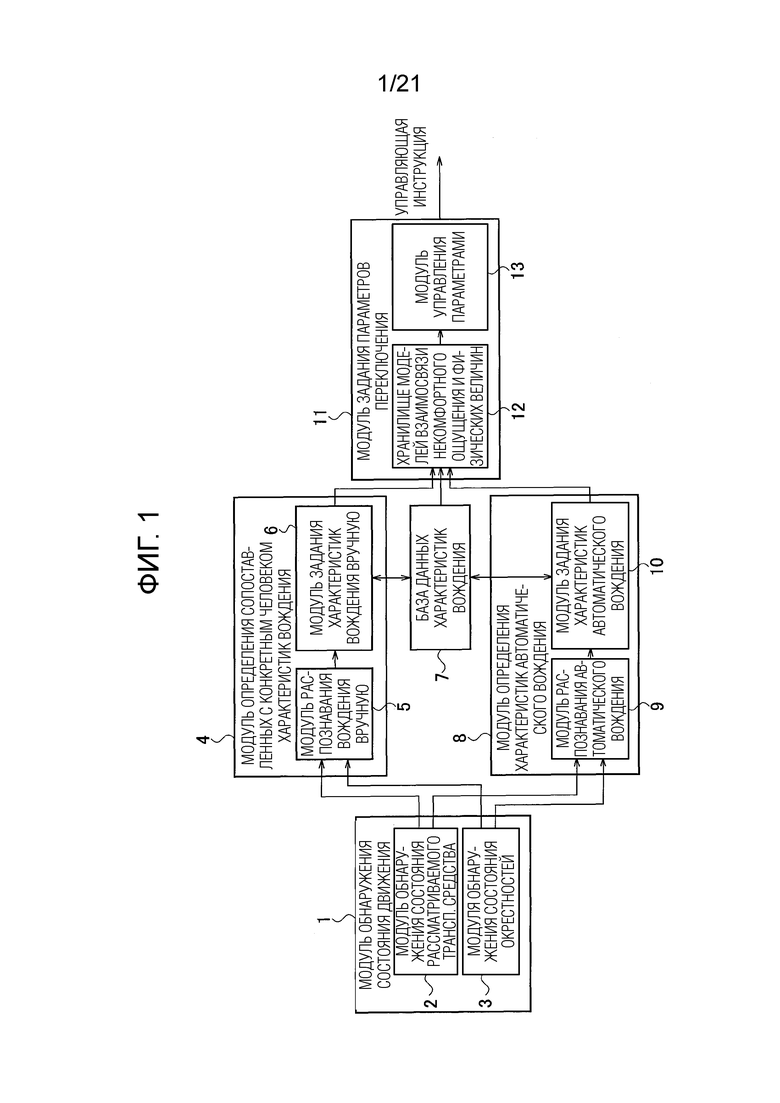

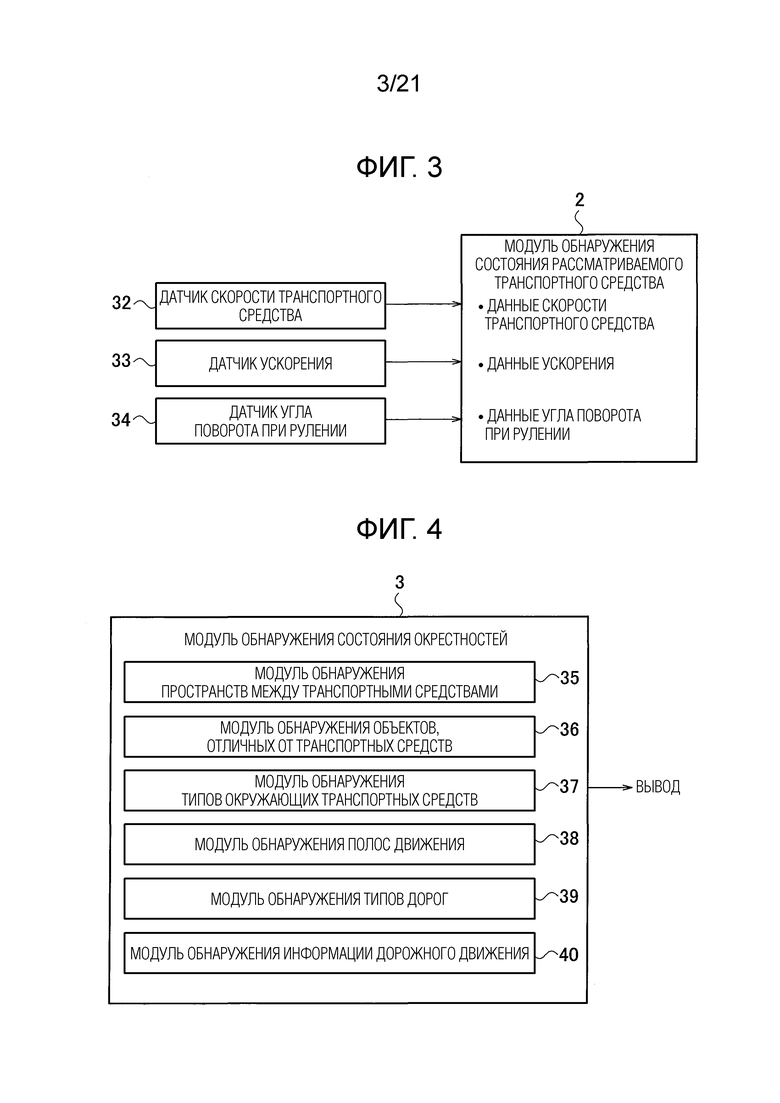
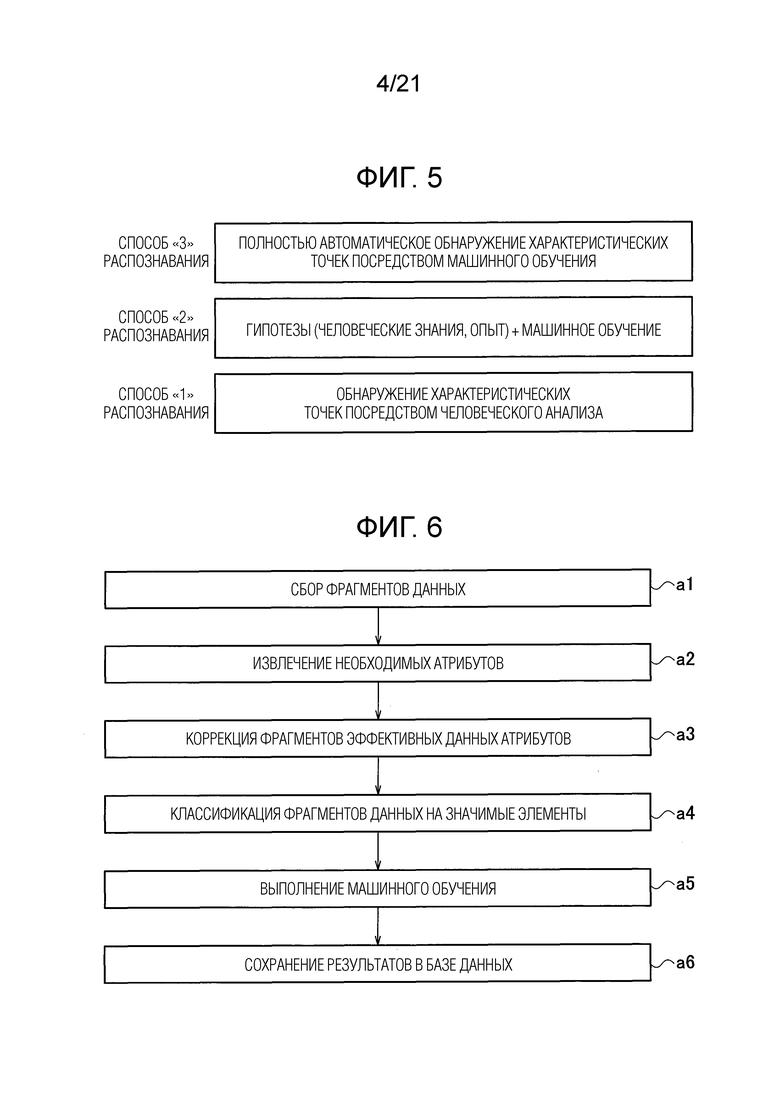
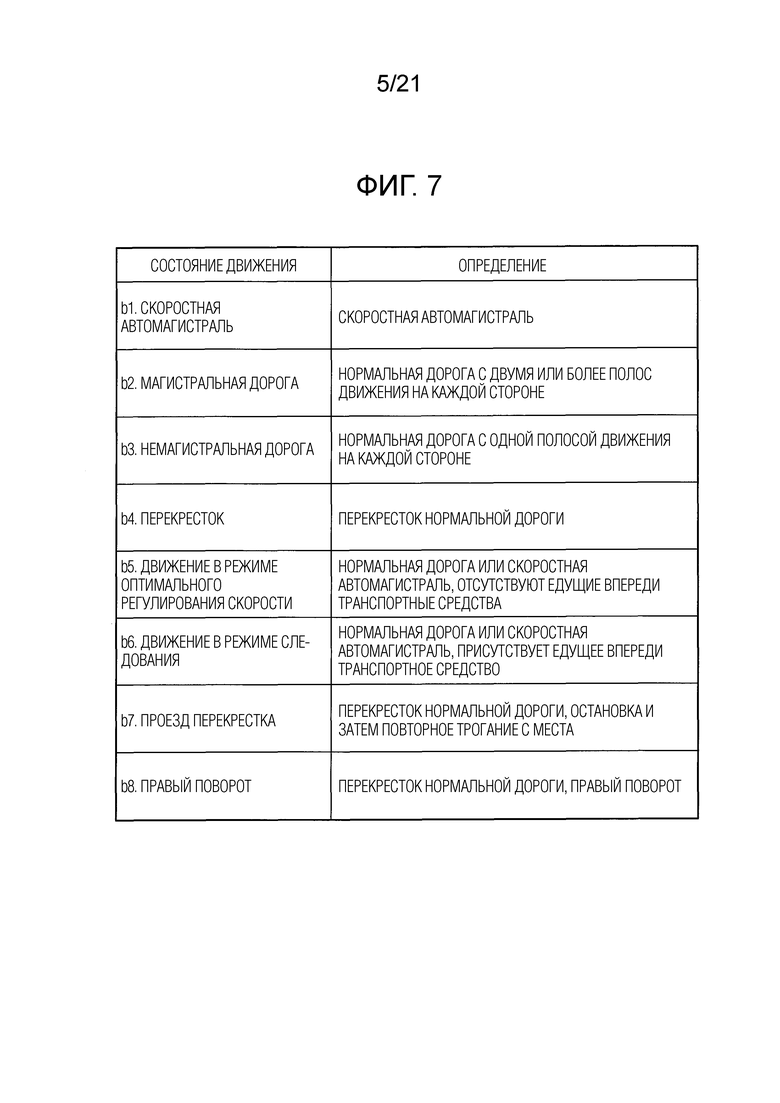
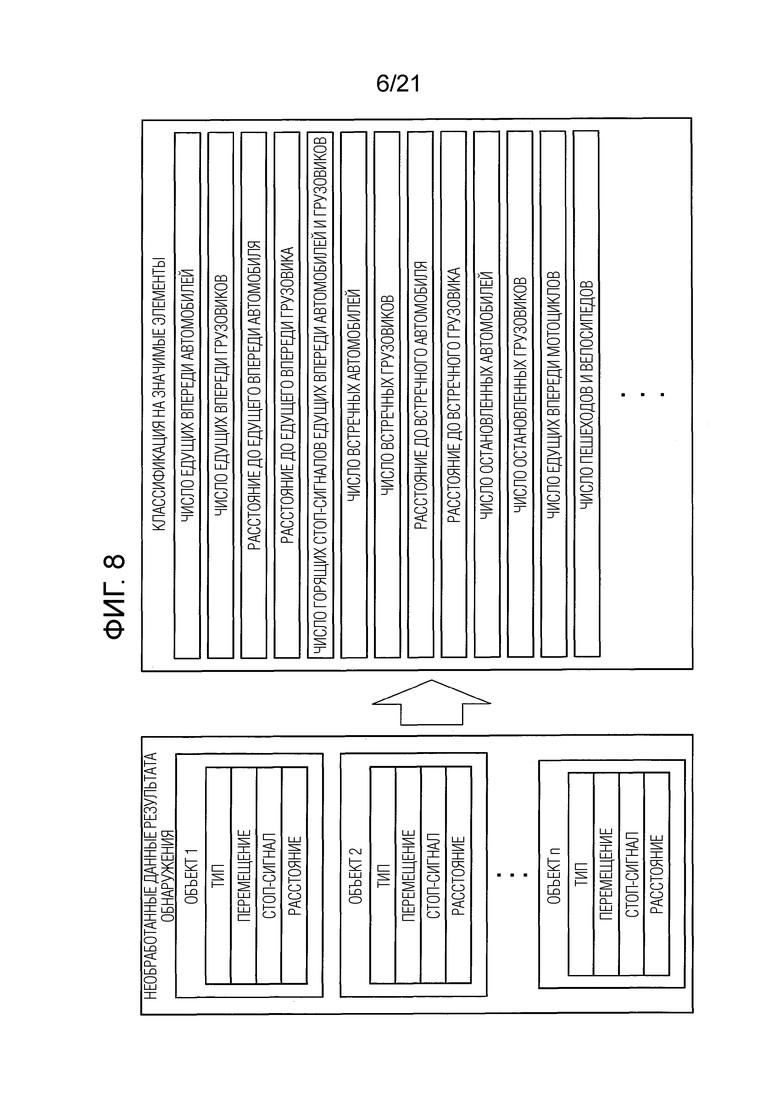
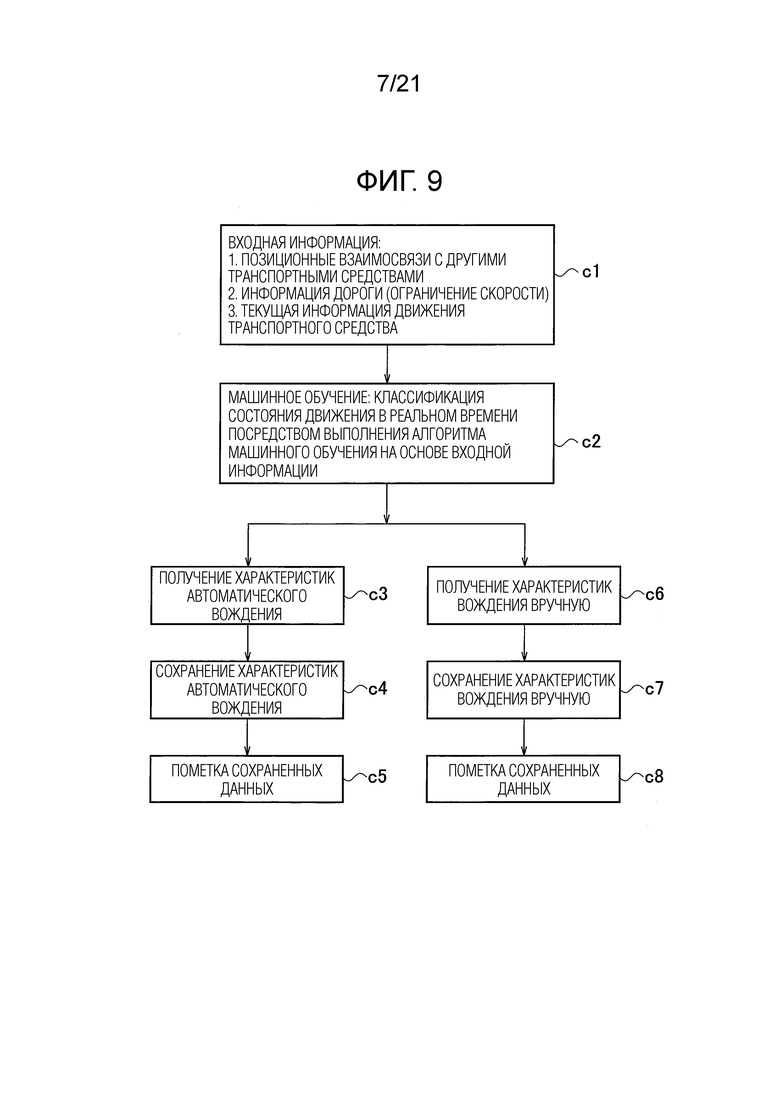
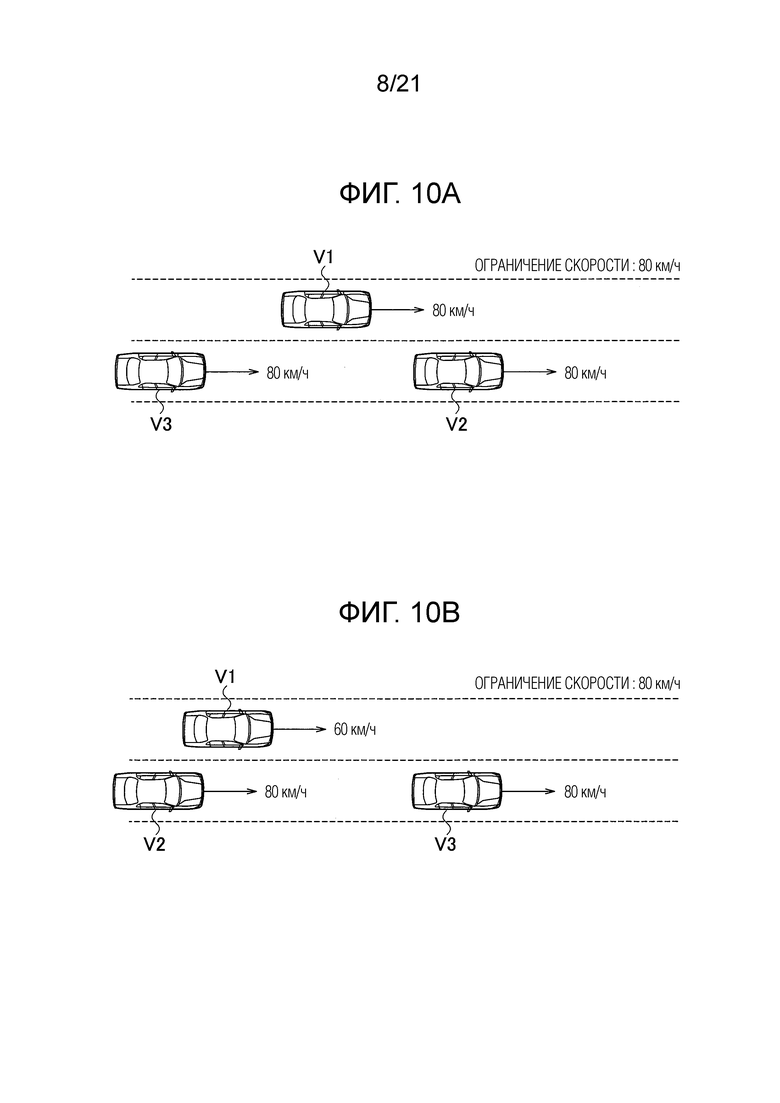
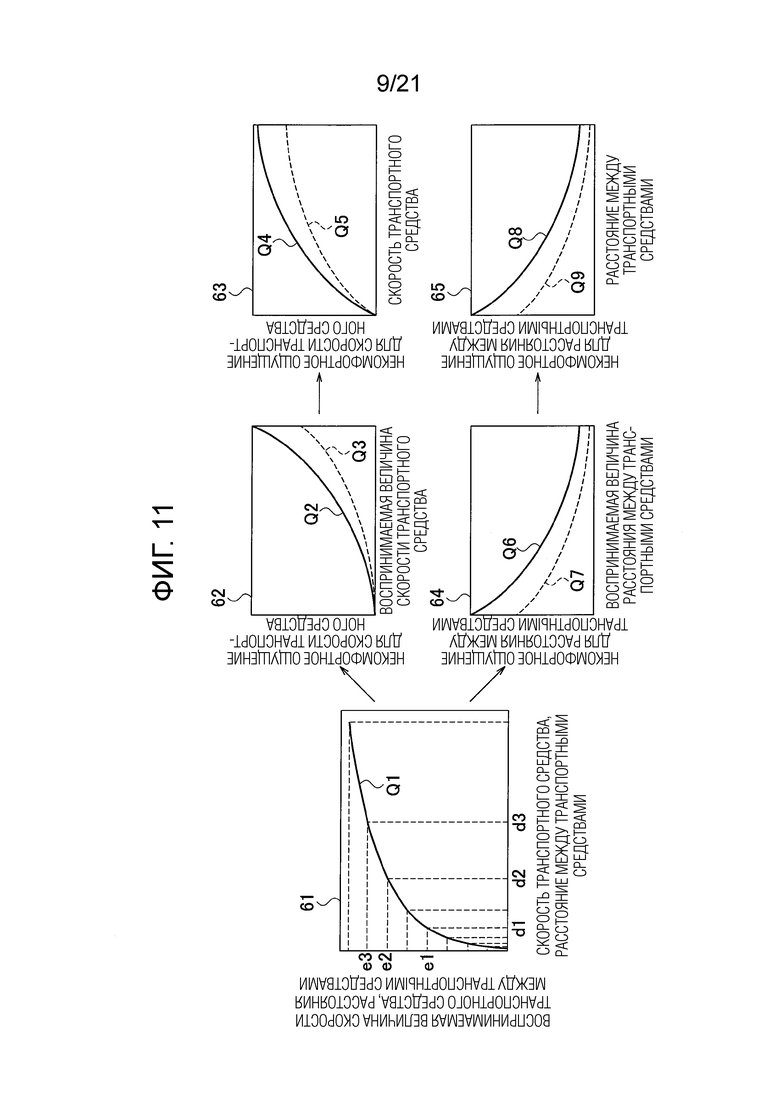
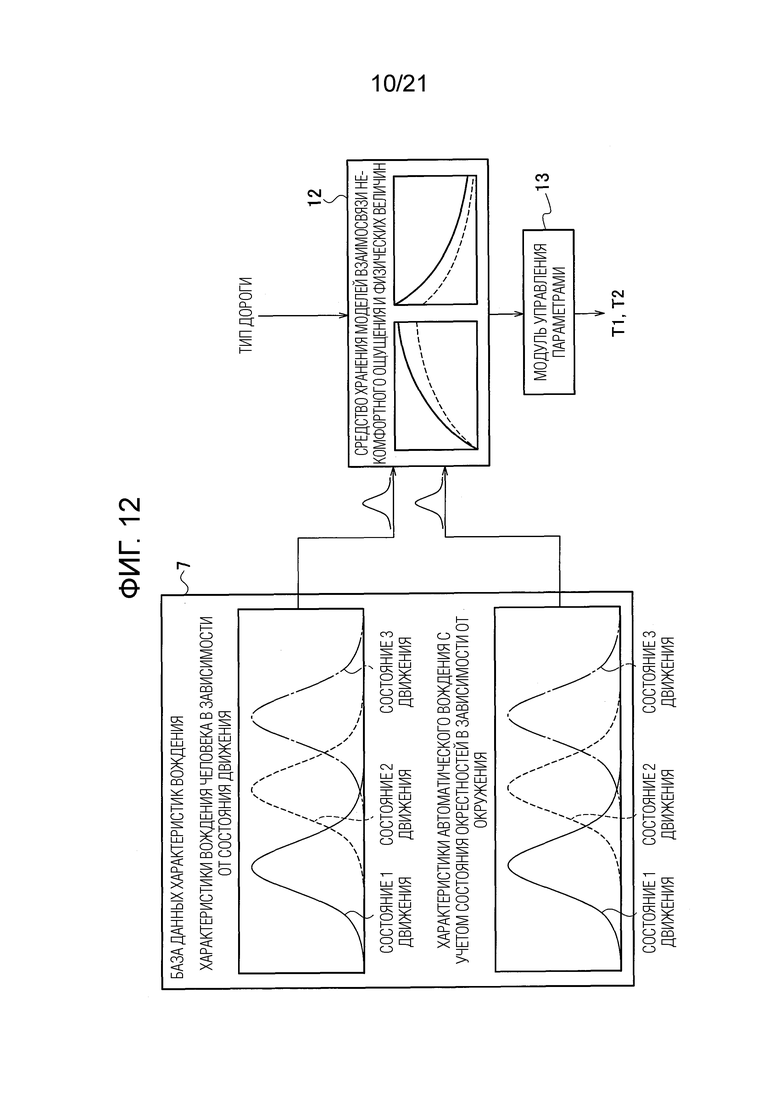
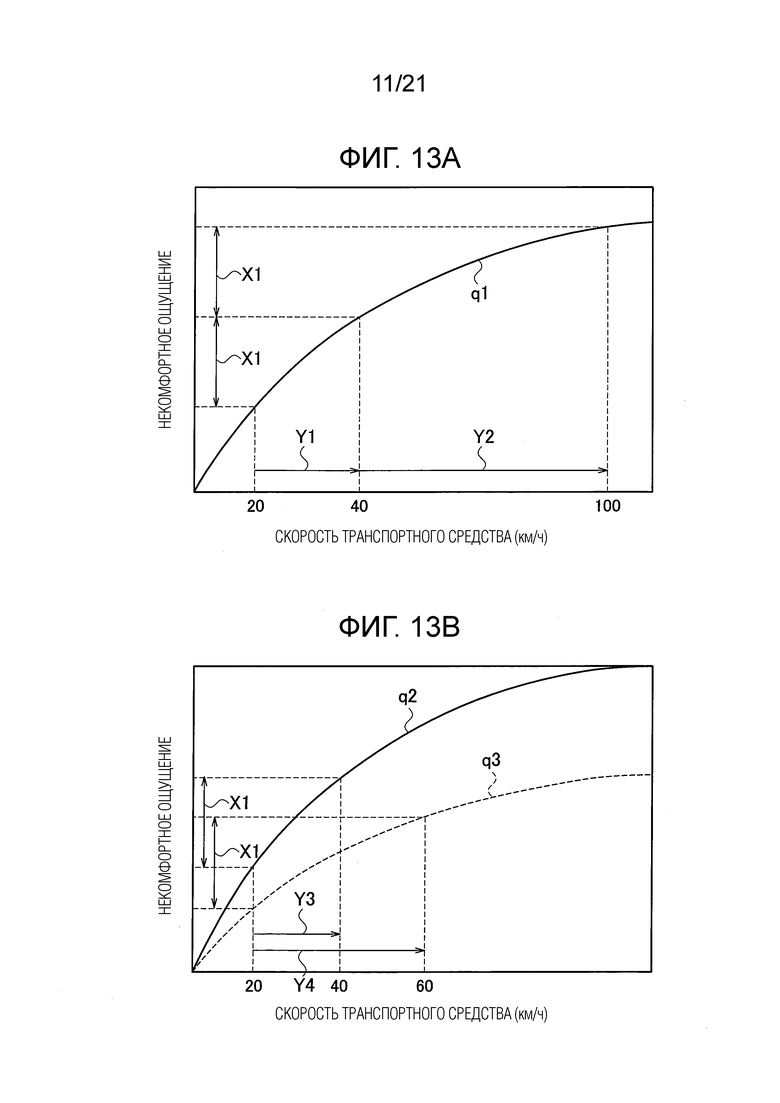
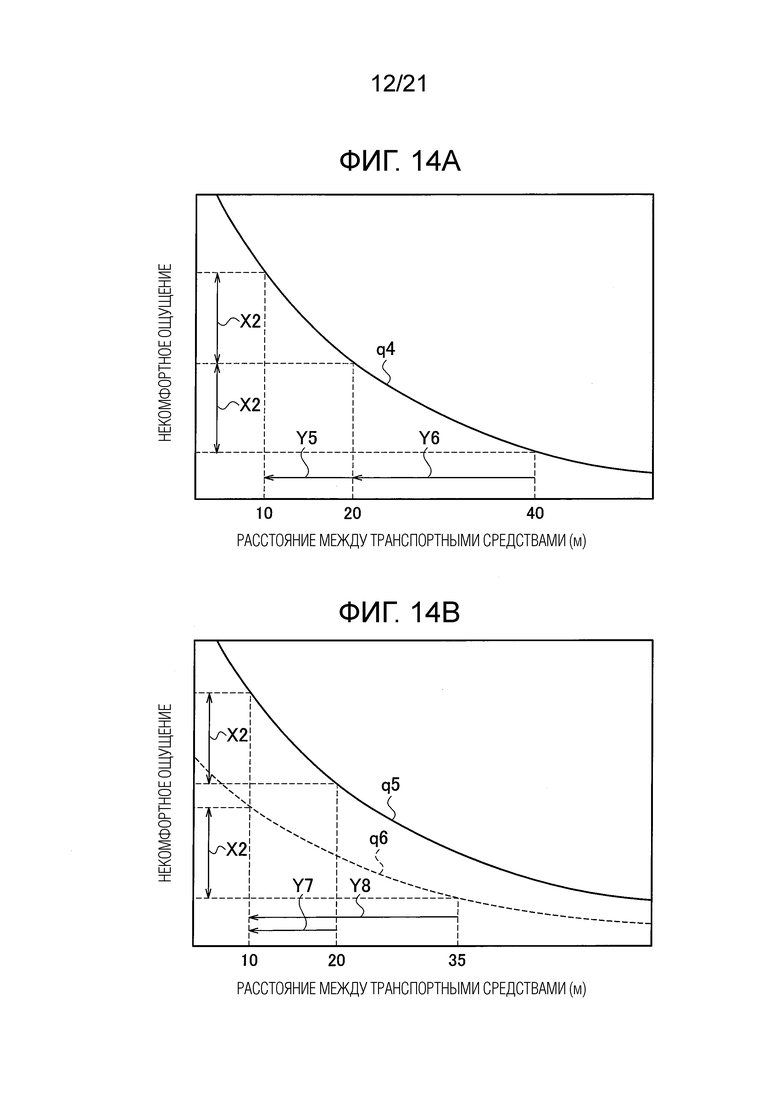
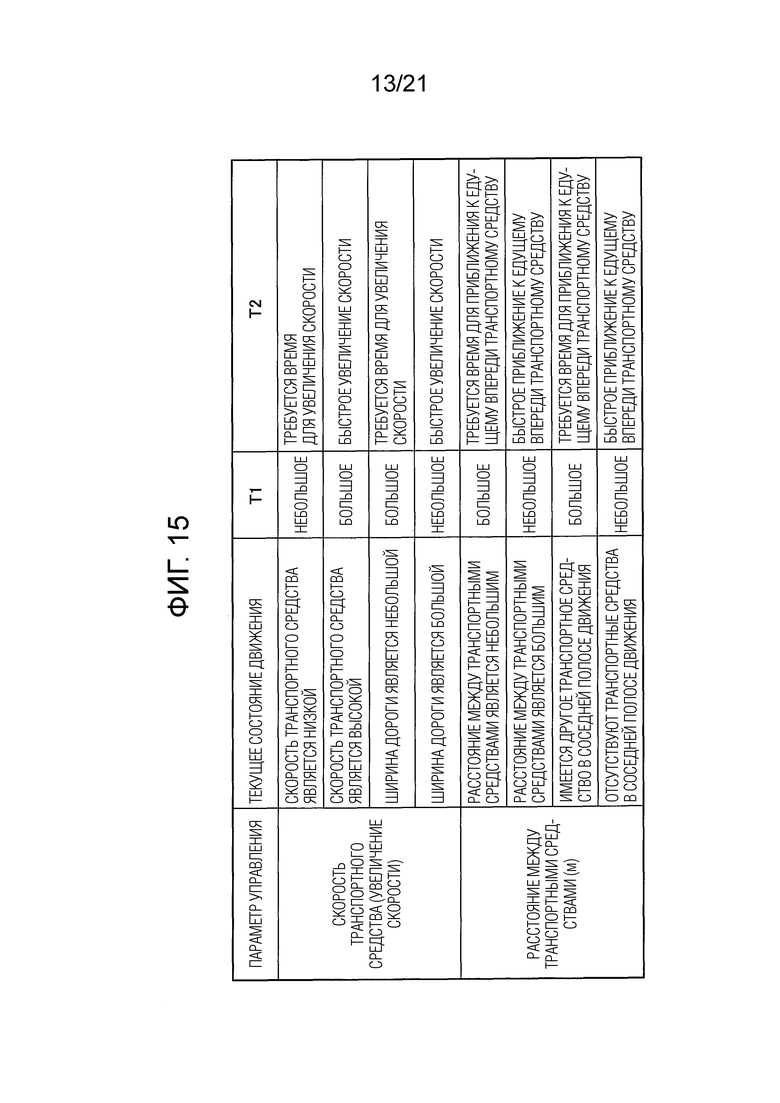
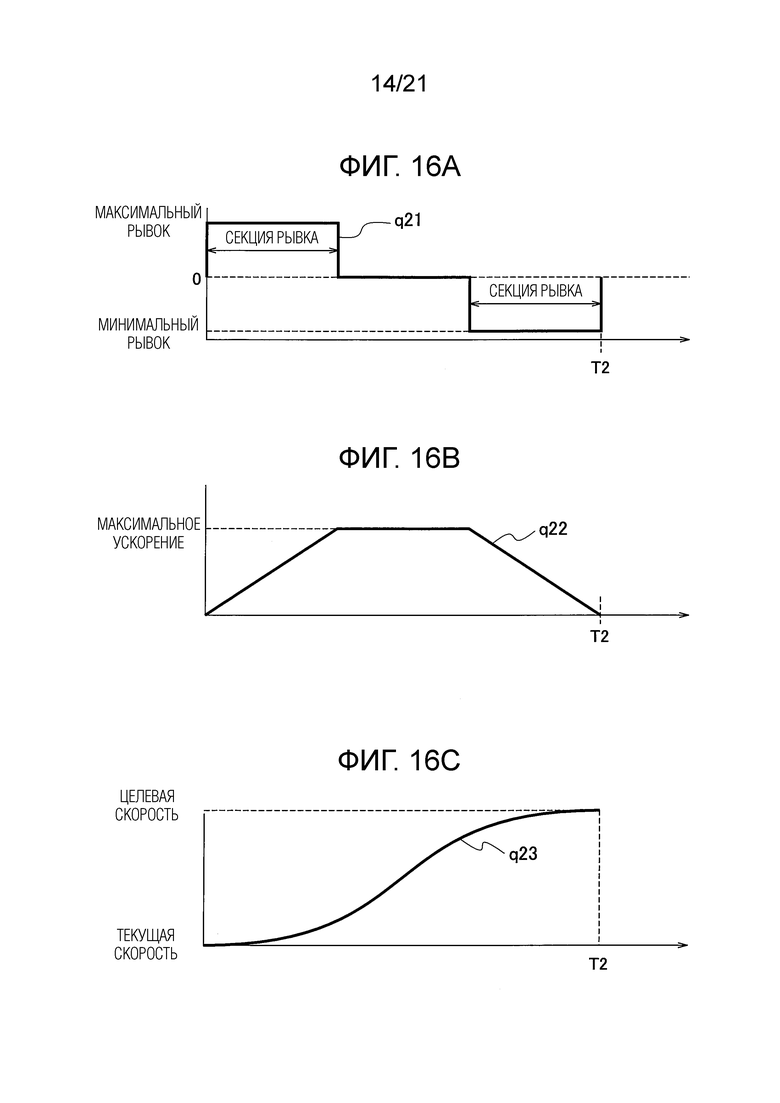
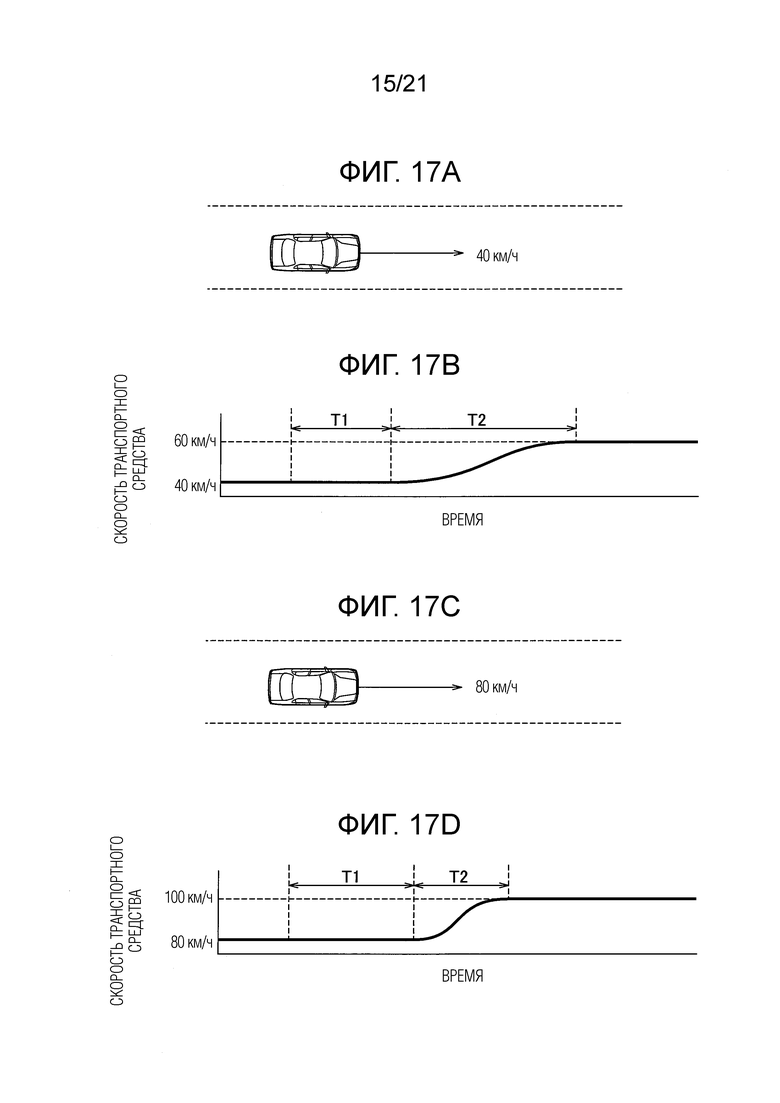
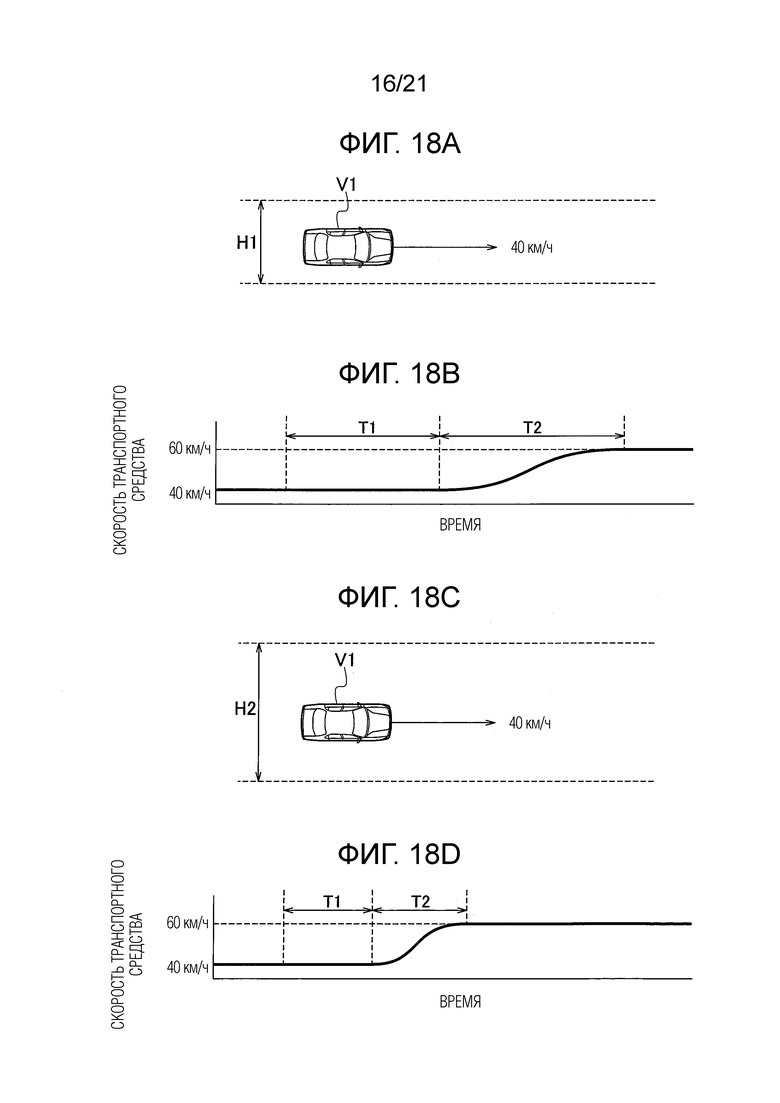
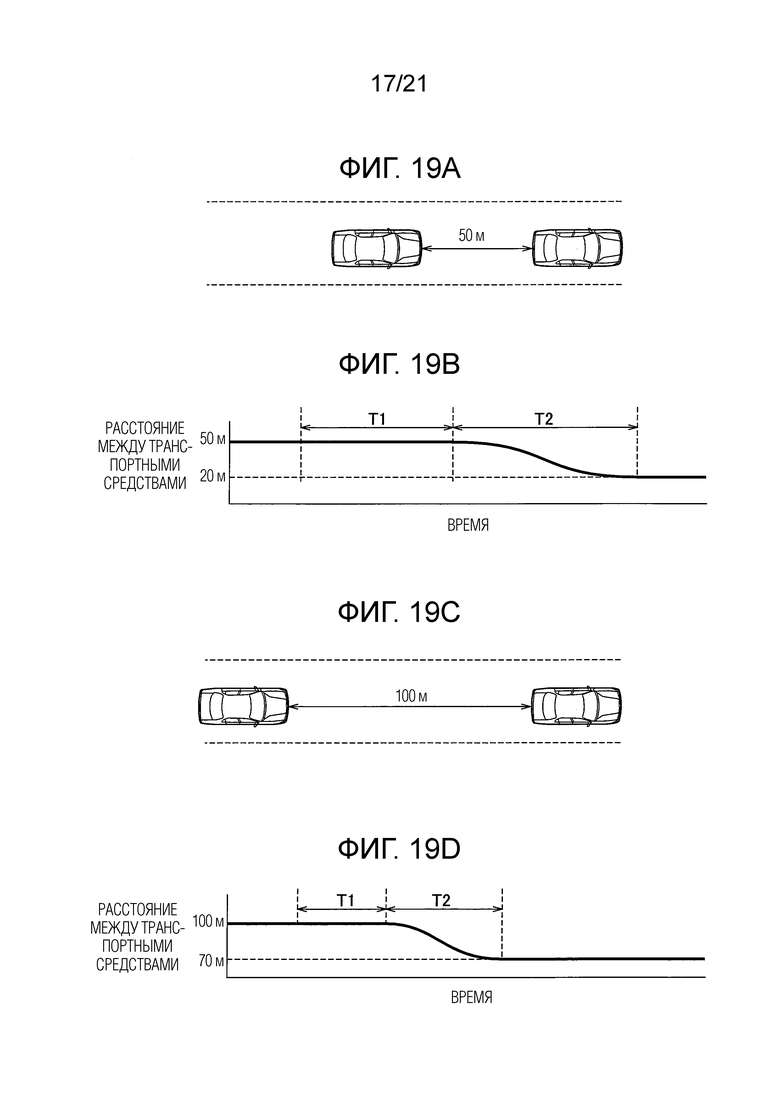
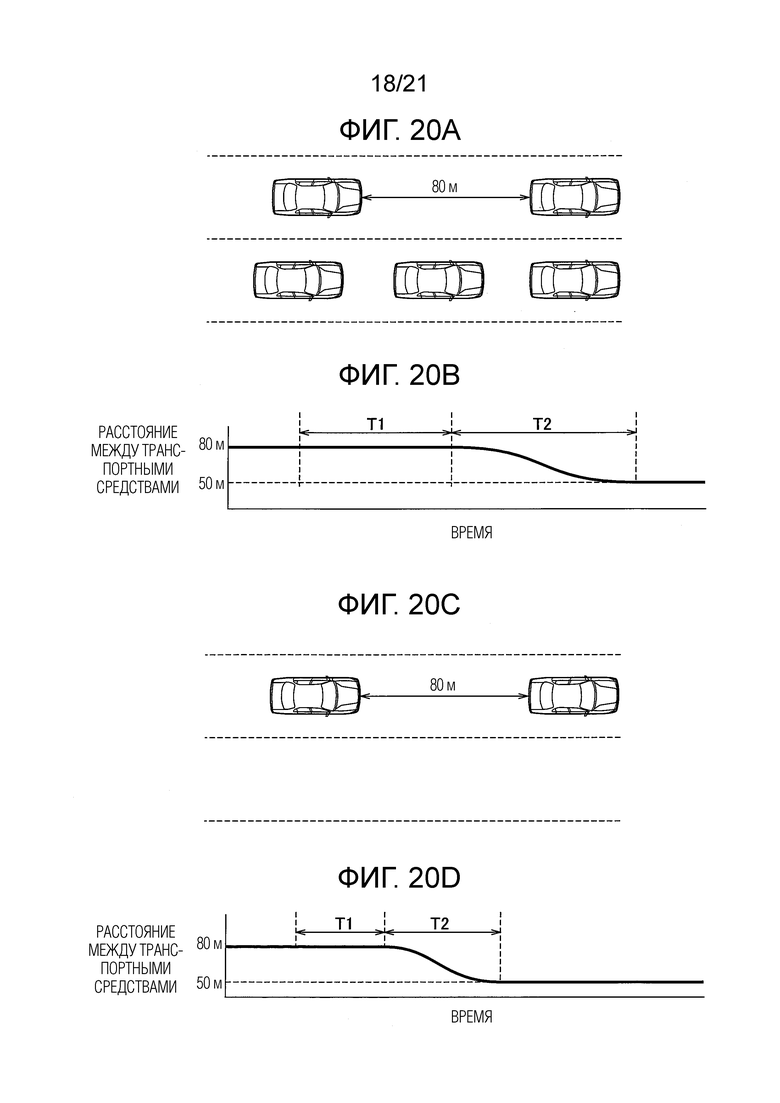
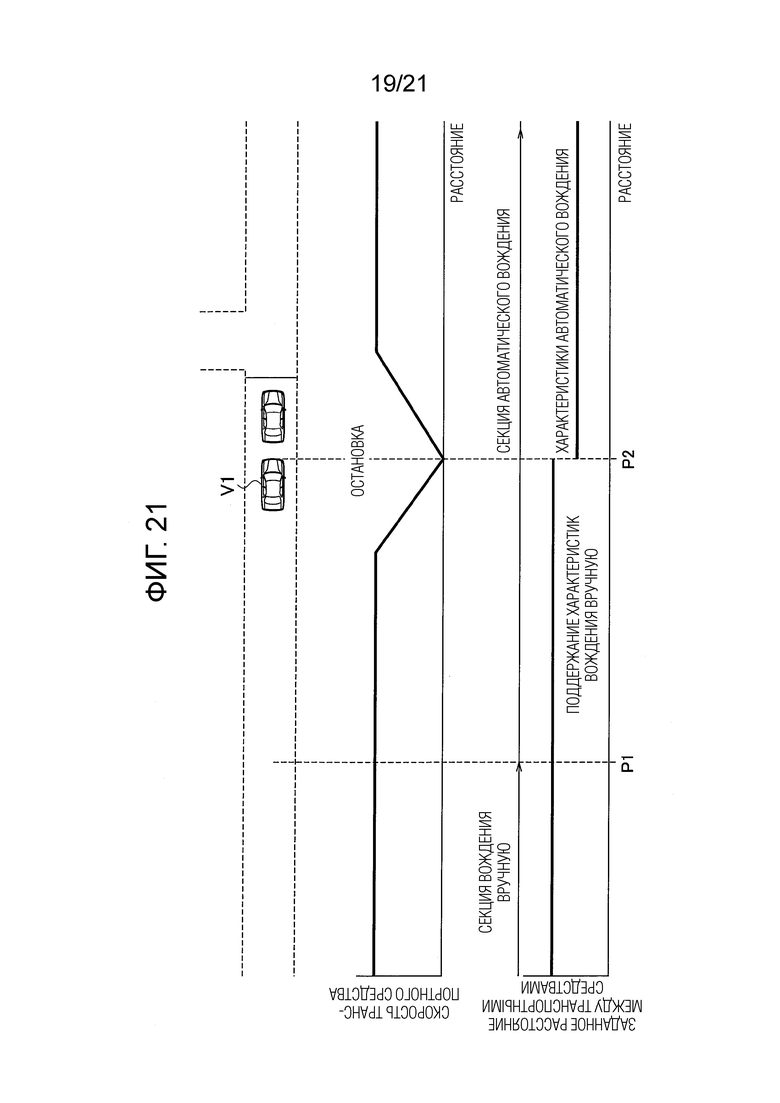
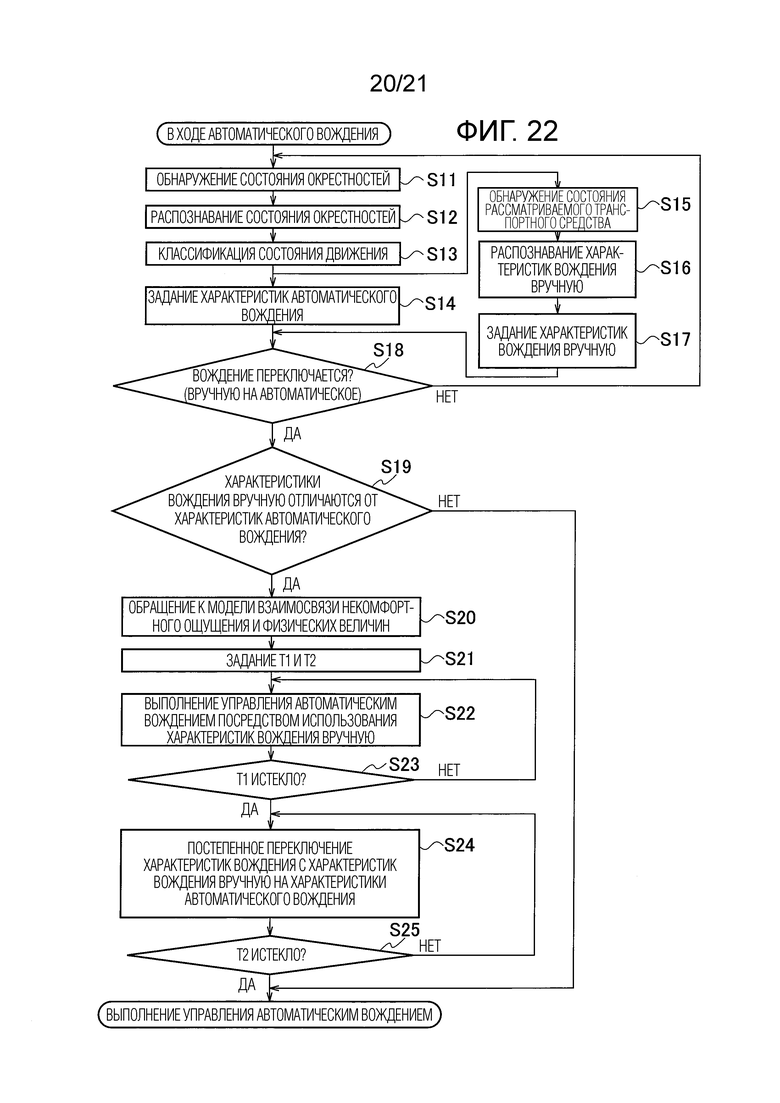
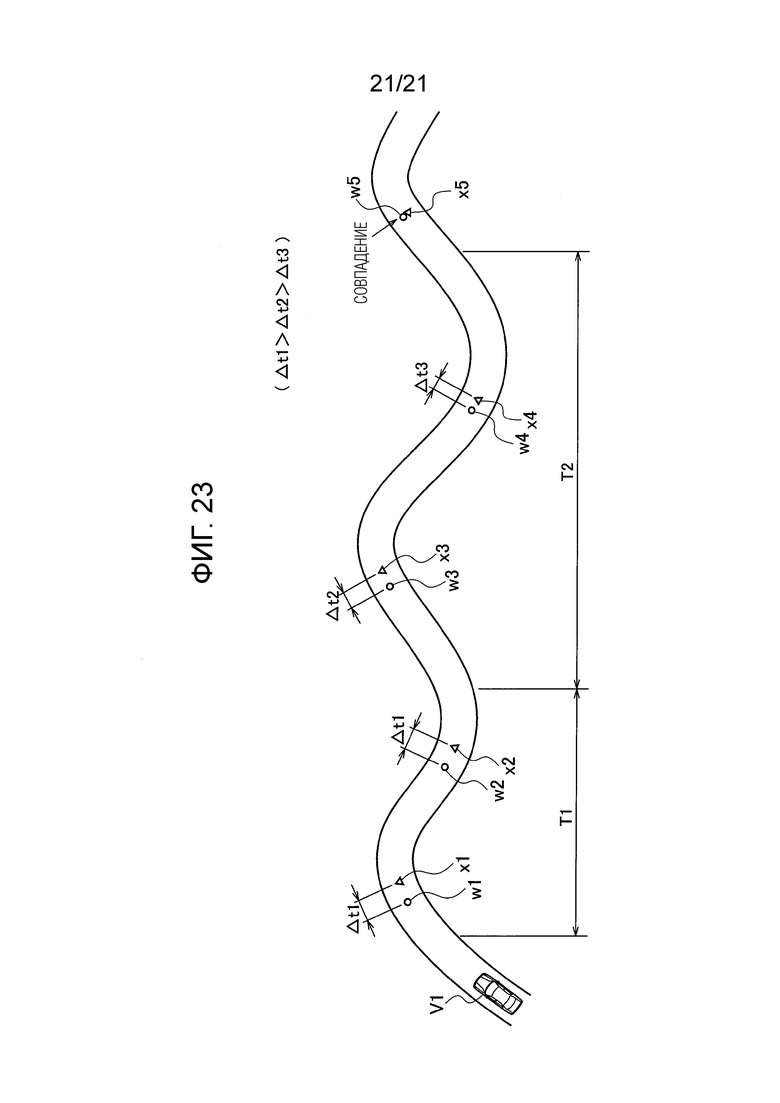
Изобретение относится к способу управления и к устройству управления транспортного средства с функцией автоматического вождения. Способ управления транспортным средством с функцией автоматического вождения, переключаемым между вождением вручную, при котором транспортное средство задается с возможностью двигаться в зависимости от операции человека, занимающего место в транспортном средстве, и автоматическим вождением. При автоматическом вождении характеристики вождения в автоматическом движении задаются, и транспортное средство задается с возможностью автоматически двигаться на основе характеристик вождения. Характеристики вождения вручную при вождении вручную человеком, занимающим место в транспортном средстве, распознаются, и, когда переключение с вождения вручную на автоматическое вождение выполняется, автоматическое вождение выполняется с характеристиками вождения вручную, поддерживаемыми в течение предварительно установленного времени (T1) поддержания характеристик вождения вручную. Повышается комфорт при эксплуатации. 2 н. и 20 з.п. ф-лы, 40 ил.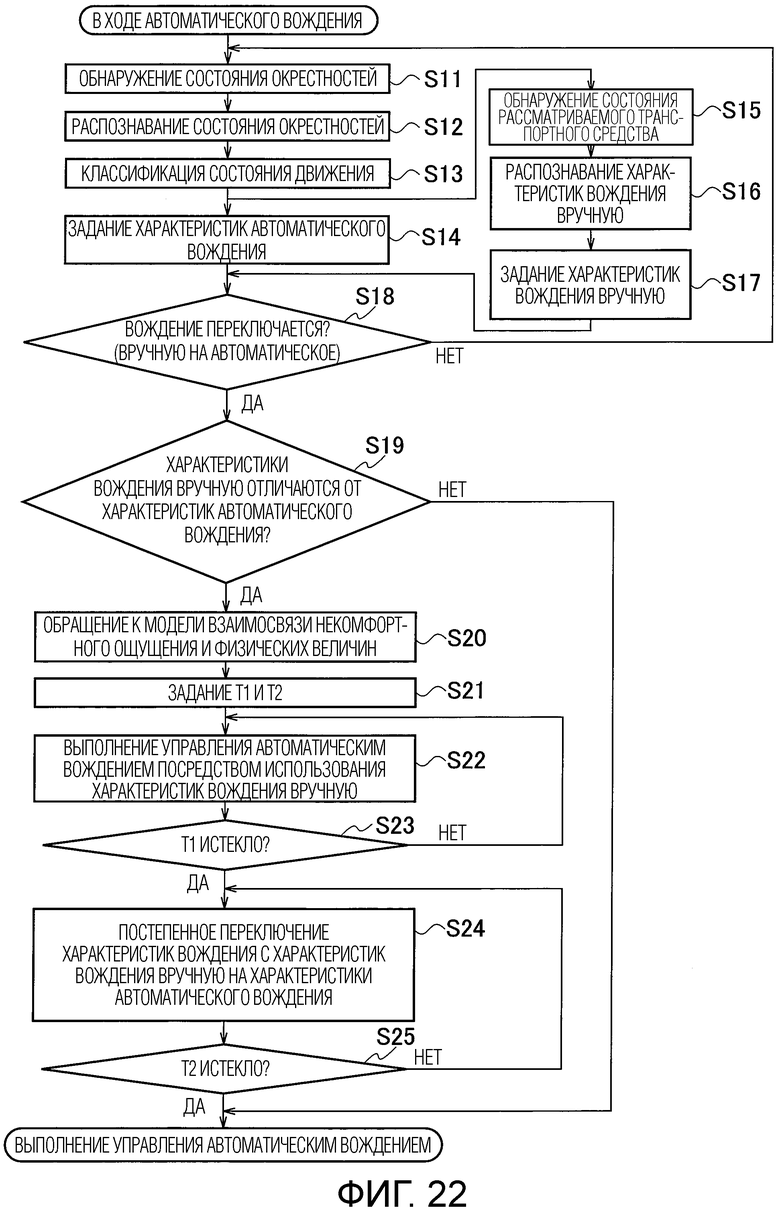
1. Способ управления транспортным средством с функцией автоматического вождения, переключаемым между вождением вручную, при котором транспортное средство задается с возможностью двигаться в зависимости от операции человека, занимающего место в транспортном средстве, и автоматическим вождением, при котором характеристики вождения в автоматическом движении задаются, и транспортное средство задается с возможностью автоматически двигаться на основе характеристик вождения, содержащий этап, на котором:
- при выполнении переключения с вождения вручную на автоматическое вождение выполняют автоматическое вождение при поддержании характеристик вождения вручную, которые представляют собой характеристики вождения при вождении вручную.
2. Способ управления транспортным средством с функцией автоматического вождения по п. 1, дополнительно содержащий, при выполнении переключения с вождения вручную на автоматическое вождение, этап, на котором выполняют автоматическое вождение с характеристиками вождения вручную, поддерживаемыми в течение предварительно установленного времени поддержания характеристик вождения вручную.
3. Способ управления транспортным средством с функцией автоматического вождения по п. 2, дополнительно содержащий этапы, на которых:
- обнаруживают физическую величину при автоматическом вождении; и
- задают время поддержания характеристик вождения вручную на основе физической величины.
4. Способ управления транспортным средством с функцией автоматического вождения по п. 3, дополнительно содержащий этапы, на которых:
- определяют скорость транспортного средства в качестве физической величины; и
- задают время поддержания характеристик вождения вручную таким образом, что чем выше скорость транспортного средства, тем больше время поддержания характеристик вождения вручную.
5. Способ управления транспортным средством с функцией автоматического вождения по п. 3 или 4, дополнительно содержащий этапы, на которых:
- определяют ширину дороги в качестве физической величины; и
- задают время поддержания характеристик вождения вручную таким образом, что чем меньше ширина дороги, тем больше время поддержания характеристик вождения вручную.
6. Способ управления транспортным средством с функцией автоматического вождения по п. 3 или 4, дополнительно содержащий этапы, на которых:
- определяют расстояние между транспортными средствами в качестве физической величины; и
- задают время поддержания характеристик вождения вручную таким образом, что чем меньше расстояние между транспортными средствами, тем больше время поддержания характеристик вождения вручную.
7. Способ управления транспортным средством с функцией автоматического вождения по п. 3 или 4, дополнительно содержащий этапы, на которых:
- обнаруживают то, имеется или нет другое транспортное средство в смежной полосе движения, в качестве физической величины; и
- когда имеется другое транспортное средство, задают время поддержания характеристик вождения вручную больше.
8. Способ управления транспортным средством с функцией автоматического вождения по любому из пп. 2-4, дополнительно содержащий этапы, на которых:
- обнаруживают некомфортное ощущение человека, занимающего место в транспортном средстве, при автоматическом вождении; и
- задают время поддержания характеристик вождения вручную на основе некомфортного ощущения.
9. Способ управления транспортным средством с функцией автоматического вождения по любому из пп. 1-4, дополнительно содержащий этап, на котором:
- после выполнения автоматического вождения при поддержании характеристик вождения при вождении вручную выполняют автоматическое вождение на основе характеристик автоматического вождения, отличающихся от характеристик вождения вручную.
10. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этап, на котором инструктируют характеристикам вождения постепенно переходить от характеристик вождения вручную к характеристикам автоматического вождения.
11. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этап, на котором выполняют переход от характеристик вождения вручную к характеристикам автоматического вождения таким образом, что величина увеличения некомфортного ощущения человека, занимающего место в транспортном средстве, за определенное время меньше или равна предварительно установленному первому пороговому значению.
12. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этапы, на которых:
- определяют скорость транспортного средства; и
- выполняют переход от характеристик вождения вручную к характеристикам автоматического вождения таким образом, что чем ниже скорость транспортного средства, тем больше время, требуемое для увеличения скорости.
13. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этапы, на которых:
- определяют ширину дороги, и
- выполняют переход от характеристик вождения вручную к характеристикам автоматического вождения таким образом, что чем меньше ширина дороги, тем больше время, требуемое для увеличения скорости.
14. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этапы, на которых:
- определяют расстояние между транспортными средствами; и
- выполняют переход от характеристик вождения вручную к характеристикам автоматического вождения таким образом, что чем меньше расстояние между транспортными средствами, тем больше время, требуемое для того, чтобы приближаться к едущему впереди транспортному средству.
15. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этапы, на которых:
- обнаруживают то, имеется или нет другое транспортное средство в смежной полосе движения; и
- выполняют переход от характеристик вождения вручную к характеристикам автоматического вождения таким образом, что, когда имеется другое транспортное средство в смежной полосе движения, время, требуемое для того, чтобы приближаться к едущему впереди транспортному средству, является большим.
16. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этап, на котором выполняют переход от характеристик вождения вручную к характеристикам автоматического вождения таким образом, что величина уменьшения некомфортного ощущения человека, занимающего место в транспортном средстве, за определенное время больше или равна предварительно установленному второму пороговому значению.
17. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этапы, на которых:
- определяют скорость транспортного средства; и
- выполняют переход от характеристик вождения вручную к характеристикам автоматического вождения таким образом, что чем выше скорость транспортного средства, тем меньше время, требуемое для уменьшения скорости.
18. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этапы, на которых:
- определяют ширину дороги; и
- выполняют переход от характеристик вождения вручную к характеристикам автоматического вождения таким образом, что чем больше ширина дороги, тем меньше время, требуемое для уменьшения скорости.
19. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этапы, на которых:
- определяют расстояние между транспортными средствами; и
- выполняют переход от характеристик вождения вручную к характеристикам автоматического вождения таким образом, что чем больше расстояние между транспортными средствами, тем меньше время, требуемое для того, чтобы отъезжать от едущего впереди транспортного средства.
20. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этапы, на которых:
- обнаруживают то, имеется или нет другое транспортное средство в смежной полосе движения; и
- выполняют переход от характеристик вождения вручную к характеристикам автоматического вождения таким образом, что, когда отсутствуют транспортные средства в смежной полосе движения, время, требуемое для того, чтобы отъезжать от едущего впереди транспортного средства, задается меньше.
21. Способ управления транспортным средством с функцией автоматического вождения по п. 9, дополнительно содержащий этапы, на которых:
- определяют то, остановлено или нет транспортное средство, при переключении с вождения вручную на автоматическое вождение; и
- при определении того, что транспортное средство остановлено, выполняют переход от характеристик вождения вручную к характеристикам автоматического вождения.
22. Устройство управления транспортного средства с функцией автоматического вождения, переключаемого между вождением вручную, при котором транспортное средство задается с возможностью двигаться в зависимости от операции человека, занимающего место в транспортном средстве, и автоматическим вождением, при котором характеристики вождения в автоматическом движении задаются, и транспортное средство задается с возможностью автоматически двигаться на основе характеристик вождения, содержащее конфигурацию, которая выполняет автоматическое вождение при поддержании характеристик вождения вручную при выполнении переключения с вождения вручную на автоматическое вождение, причем характеристики вождения вручную представляют собой характеристики вождения при вождении вручную.
| JP 2012051441 A, 15.03.2012 | |||
| US 9150220 B2, 06.10.2015 | |||
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ ПОТОКАМИ И УСТРОЙСТВО МОНИТОРИНГА ДОРОЖНОЙ СИТУАЦИИ | 2012 |
|
RU2477527C1 |

