ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу для управления опорной скоростью vref_dhsc для системы регулирования скорости на спуске согласно преамбуле п. 1 и системе для управления опорной скоростью vref_dhsc для устройства регулирования скорости на спуске согласно преамбуле п. 24.
Настоящее изобретение также относится к компьютерной программе и компьютерному программному продукту, которые исполняют способ в соответствии с изобретением.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
На транспортные средства, и особенно большегрузные транспортные средства, такие как грузовые автомобили и автобусы, влияет сила тяжести на уклонах спусков таким образом, что их скорость увеличивается. По этой причине многие грузовые автомобили оборудованы системой регулирования скорости на спуске, которая выполнена с возможностью ограничивать скорость транспортного средства с тем, чтобы она не превышала предопределенное значение.
Заданная скорость vset_dhsc для системы регулирования скорости на спуске устанавливается водителем транспортного средства, например. Затем система регулирования скорости на спуске гарантирует, что эта заданная скорость vset_dhsc не превышается путем управления одним или более тормозными устройствами в транспортном средстве, выполняемого в зависимости от опорной скорости vref_dhsc для системы регулирования скорости на спуске, в которой опорная скорость vref_dhsc зависит от заданной скорости vset_dhsc, опорная скорость vref_dhsc часто соответствует заданной скорости vset_dhsc, за исключением, например, случая линейного нарастания уставки системы регулирования скорости на спуске для повышения комфорта.
Тормозные устройства предназначены для создания крутящего момента при торможении, который действует, чтобы снизить скорость транспортного средства, например, понижая скорость вращения колесной пары, обеспечивающей транспортному средству движение вперед. Тормозные устройства могут содержать одно или более вспомогательных тормозных устройств, таких как тормоз двигателя, тормоз-замедлитель в выпускной системе двигателя, электромагнитный замедлитель и гидравлический замедлитель. Вспомогательные тормозные устройства являются полезными для умеренного замедления и для автоматического поддержания скорости на спуске. Это означает, что обычные колесные тормозы не изнашиваются и не перегреваются излишне.
Например, заданная скорость vset_dhsc может устанавливаться водителем посредством некоторого типа ввода, например, путем нажатия кнопки, поворота кнопки, приведения в действие рычага, ввода на экран, приведения в действие тормозной педали или через некоторый другой тип ввода, известный специалистам в области техники.
Имеются несколько различных типов систем регулирования скорости на спуске. Одним таким типом является система ручного регулирования скорости на спуске, которая может использоваться, когда функция автоматического поддержания скорости не активирована. Здесь водитель определяет заданную скорость vset_dhsc посредством некоторого типа кнопочного ввода, например, используя кнопку рулевого колеса, которая затем используется для регулирования одного или более вспомогательных тормозных устройств, например тормоза-замедлителя в выпускной системе двигателя и замедлителя.
Другим типом системы регулирования скорости на спуске является автоматическая система регулирования скорости на спуске. Здесь заданная скорость vset_dhsc устанавливается с использованием тормозной педали или тому подобного таким образом, что заданная скорость vset_dhsc устанавливается в значение, соответствующее действительной скорости vact, с которой перемещается транспортное средство, когда тормозную педаль отпускают после того, как применили.
Другой тип системы регулирования скорости на спуске - система регулирования скорости на спуске со смещением. Здесь заданная скорость vset_dhsc для системы регулирования скорости на спуске устанавливается в виде смещения к заданной скорости vset_cc для системы автоматического поддержания скорости в транспортном средстве. Если использующая смещение система регулирования скорости на спуске развертывается, когда заданная скорость vset_cc для автоматического поддержания скорости была выбрана водителем, заданная скорость vset_dhsc для системы регулирования скорости на спуске будет относиться к заданной скорости vset_cc для автоматического поддержания скорости. Другими словами, заданная скорость vset_dhsc для системы регулирования скорости на спуске является такой же, как заданная скорость для системы автоматического поддержания скорости vset_cc плюс смещение, vset_dhsc=vset_cc+offset. Например, это значение смещения может лежать между 3 км/ч и 15 км/ч. Другими словами, функция системы регулирования скорости на спуске состоит в предотвращении превышения для скорости транспортного средства скорости, которая, например, на 3 км/ч выше, чем заданная скорость vset_cc для системы автоматического поддержания скорости, если было выбрано смещение в 3 км/ч.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В общих чертах, транспортное средство теряет кинетическую энергию Wk, когда его тормозят от более высокой скорости к более низкой скорости. Если более высокая скорость достигалась эффектом силы тяжести, например, на или после уклона спуска (нисходящего уклона), является положительным с точки зрения экономии топлива иметь способность использовать эту кинетическую энергию Wk вместо ее потери через торможение.
Однако по причине других транспортных средств на дороге и/или ограничений скорости транспортному средству может не разрешаться свободно повышать свою скорость на уклонах спусков, например. По этой причине функция системы регулирования скорости на спуске является важной для управления движением транспортного средства.
При наблюдении фактического движения транспорта следующие характеристики поведения водителя были относительно общими. Здесь поведение иллюстрировалось для ограничения скорости в 90 км/ч, однако специалист в области техники оценит, что соответствующие проблемы также происходят при других ограничениях скорости.
Многие водители устанавливают заданную скорость vset_cc для системы автоматического поддержания скорости в ее максимальное значение, которым может быть 89 км/ч, например (или 90 км/ч для некоторых производителей), если ограничение скорости для участка дороги составляет 90 км/ч. Заданная скорость vset_dhsc для системы регулирования скорости на спуске затем устанавливается несколько выше заданной скорости vset_cc для системы автоматического поддержания скорости. Например, для заданной скорости vset_dhsc для системы регулирования скорости на спуске характерно установление в такую же скорость, как заданная скорость для системы автоматического поддержания скорости vset_cc плюс смещение в 3 км/ч. Другими словами, заданная скорость vset_dhsc для системы регулирования скорости на спуске часто устанавливается в 92 км/ч, например.
Вследствие силы тяжести, когда транспортное средство достигает уклона спуска, оно ускорится выше заданной скорости vset_cc для системы автоматического поддержания скорости, и транспортное средство будет тормозиться на заданной скорости vset_dhsc для системы регулирования скорости на спуске, если опорная скорость vref_dhsc для системы регулирования скорости на спуске будет такой же, как заданная скорость vset_dhsc для системы регулирования скорости на спуске, vref_dhsc=vset_dhsc, другими словами, - в 92 км/ч. Здесь заданная скорость vset_dhsc является значением, которое водитель вводит в систему регулирования скорости на спуске, тогда как опорная скорость vref_dhsc является уставкой, с помощью которой система регулирования скорости на спуске управляет тормозными устройствами в транспортном средстве, такими как основные тормозные устройства и/или вспомогательные тормозные устройства. На длинных уклонах спуска транспортное средство будет иметь действительную скорость vact приблизительно в 92 км/ч для относительно значительной части уклона спуска; это также означает временно более высокую среднюю скорость транспортного средства. Это показано схематично на Фиг. 1a, на которой заданная скорость vset_dhsc 101 для системы регулирования скорости на спуске составляет 92 км/ч, заданная скорость vset_cc для системы автоматического поддержания скорости составляет 89 км/ч и где действительная скорость vact 103 повышается приблизительно до 92 км/ч и остается таковой для значительной части уклона спуска на схематическом высотном участке 104.
Тяжелые грузовые автомобили часто оснащаются тахографами, которые могут быть и полностью электронными, и частично механическими. Тахограф непрерывно регистрирует скорость транспортного средства среди прочего. Сверхнормативная (нарушающая нормативы) скорость vs1 также является заданной, которая является известной тахографу. Эта сверхнормативная скорость vs1 может относиться к максимальной допустимой скорости для транспортного средства и/или к существующему ограничению скорости движения для применимого участка дороги. Если транспортное средство нельзя приводить в движение быстрее, чем с 90 км/ч, и/или ограничение скорости для применимого участка дороги составляет 90 км/ч, эта сверхнормативная скорость vs1 может устанавливаться в 90,5 км/ч, например.
Тахографы часто выполняются с возможностью регистрации нарушения для водителя, если сверхнормативная скорость vs1 превышалась в течение предопределенного периода Ts1 нарушения. Например, тахограф может зарегистрировать нарушение, если действительная скорость vact транспортного средства превышает сверхнормативную скорость vs1 в 90,5 км/ч в течение предопределенного периода Ts1 нарушения, эквивалентного 60 секундам. Другими словами, если уклон спуска означает, что транспортное средство осуществляет ускорение до 92 км/ч и тормозится системой регулирования скорости на спуске с таковой и затем остается на этой скорости более 60 секунд, то водитель получит нарушение, зарегистрированное в тахографе.
В нескольких странах во всем мире полиция может штрафовать водителя на основании таких нарушений, зарегистрированных в тахографе. Другими словами, полиция в этих странах может требовать видеть информацию на тахографе и может также налагать штраф на основании этой информации.
Во многих транспортных средствах водитель будет предупреждаться прежде, чем нарушение будет зарегистрировано для водителя. Например, водитель может быть предупрежден, если имеется риск нарушения, регистрируемого, если действительная скорость vact транспортного средства превышала сверхнормативную скорость vs1 в 90,5 км/ч в течение 45 секунд, например. Поскольку водитель обычно не пожелает, чтобы нарушение подлежало регистрации, и таким образом рисковать штрафом за превышение скорости, естественный ответ водителя на это предупреждение состоит в торможении транспортного средства. Это поведение схематично показано на Фиг. 1b, где действительная скорость vact 103 резко падает 105 внизу спуска, поскольку водитель тормозит транспортное средство. Другими словами, такое поведение водителя приводит к тому, что транспортное средство выходит из уклона спуска с низкой действительной скоростью vact 103, каковое не является эффективным с точки зрения экономии топлива.
Решение этой проблемы может состоять в снижении заданной скорости vset_dhsc для системы регулирования скорости на спуске путем уменьшения смещения, например. Однако это приведет к ненужной величине действительной скорости транспортного средства vavt, тормозимой по наклонному градиенту, каковое не является оптимальным с точки зрения экономии топлива и неоптимальным с точки зрения времени в движении.
Одной задачей настоящего изобретения является регулируемым образом воспользоваться преимуществом кинетической энергии Wk, которую транспортное средство получает на уклоне спуска.
Эта задача решается посредством использования вышеупомянутого способа для управления опорной скоростью vref_dhsc для системы регулирования скорости на спуске согласно отличительной части п. 1 формулы изобретения. Задача также решается посредством использования вышеупомянутой системы для управления опорной скоростью vref_dhsc для системы регулирования скорости на спуске согласно отличительной части п. 24 формулы изобретения.
Задача также решается посредством вышеупомянутого компьютерного программного продукта и компьютерной программы, которые реализуют способ согласно изобретению.
Использование настоящего изобретения получает повышенную опорную скорость vref_dhsc_schwung для упомянутой системы регулирования скорости на спуске в конечной части уклона спуска, каковое имеет следствием повышенную действительную скорость транспортного средства в конце уклона спуска. Это повышение действительной скорости транспортного средства означает, что транспортное средство выходит из уклона спуска с повышенной кинетической энергией Wk, которая может использоваться в движении вперед транспортного средства после уклона спуска, например на уклоне подъема, который начинается после уклона спуска, или с тем, что транспортное средство могло быть движимым на более длинное расстояние до момента необходимости впрыска топлива для транспортного средства, чтобы поддерживать заданную скорость vset_cc для системы автоматического поддержания скорости.
Согласно одному варианту осуществления изобретения установление, будет ли применяться повышенная опорная скорость vref_dhsc_schwung, основывается на одном или более правилах относительно ограничений скорости и/или нарушений, регистрируемых картой цифрового тахографа. Возможность пользоваться преимуществом свободной кинетической энергии Wk, полученной благодаря ускорению транспортного средства на уклоне спуска, без риска регистрации нарушений в карте цифрового тахографа и без риска предупреждений об опасности являющегося регистрируемым нарушения, означает, что водитель может легко максимизировать повышенную действительную скорость транспортного средства в конце уклона, каковое максимизирует использование доступной кинетической энергии Wk.
Согласно одному варианту осуществления изобретения управление опорной скоростью vref_dhsc для системы регулирования скорости на спуске координируется с регулированием, выполняемым согласно опорной скорости vref_cc для системы автоматического поддержания скорости, движущей транспортное средство, чтобы максимизировать величину повышенной опорной скорости vref_dhsc_schwung. Например, управление опорной скоростью vref_dhsc для системы регулирования скорости на спуске, если скоординирована с системой автоматического поддержания скорости с управлением опорной скоростью, такой как система Scania Active Prediction (с упреждением) (система Scania с активным прогнозированием), которая может использовать сведения, что опорная скорость vref_cc для системы автоматического поддержания скорости может быть снижена до уклона спуска. Это снижение означает, что опорная скорость vref_dhsc для системы регулирования скорости на спуске в начале уклона спуска может принять значение заданной скорости vset_cc для системы автоматического поддержания скорости, чтобы затем принять повышенную опорную скорость vref_dhsc для системы регулирования скорости на спуске. Поскольку моделирование профиля vsim будущей скорости для будущей скорости транспортного средства основывается на текущей позиции/времени и вычисляется на основе данных карты (по маршруту) впереди транспортного средства, управление опорной скоростью vref_dhsc для системы регулирования скорости на спуске является очень точным.
В настоящее время имеется выраженное требование пользователя, что система автоматического поддержания скорости транспортного средства должна иметь способность гарантировать, что такая же скорость транспортного средства, которая может поддерживаться на равнине, может также поддерживаться на длинных уклонах спуска. Поскольку системы автоматического поддержания скорости с управлением опорной скоростью, такие как Scania Active Prediction, которые снижают опорную скорость vref_cc до уклонов спусков, поступают на рынок, то является весьма вероятным, что они создадут большее временное окно транспортному средству впереди него на уклоне спуска благодаря снижениям скорости до уклона спуска. Также вероятно, что транспортное средство с системой Scania Active Prediction или тому подобной сможет использовать временно более высокую конечную скорость, отслеживая уклон спуска, чтобы уменьшать временное окно впереди транспортного средства более эффективным по топливу образом. Однако это полагает, что транспортное средство впереди поддерживает постоянную скорость приблизительно в 90 км/ч.
КРАТКИЙ ПЕРЕЧЕНЬ ЧЕРТЕЖЕЙ
Изобретение будет проиллюстрировано более подробно ниже на основе приложенных чертежей, на которых одинаковые ссылки используются для одинаковых компонентов и где:
Фиг. 1a и 1b показывают примеры профилей скорости с использованием известного уровня техники,
Фиг. 2a и 2b показывают две блок-схемы последовательностей операций для различных вариантов осуществления способа согласно изобретению,
Фиг. 3 схематично показывает принцип одного варианта осуществления изобретения в одной ситуации в вождении,
Фиг. 4 схематично показывает принцип одного варианта осуществления изобретения в одной ситуации в вождении,
Фиг. 5 схематично показывает принцип одного варианта осуществления изобретения в одной ситуации в вождении,
Фиг. 6 схематично показывает принцип одного варианта осуществления изобретения в одной ситуации в вождении,
Фиг. 7 схематично показывает принцип одного варианта осуществления изобретения в одной ситуации в вождении и
Фиг. 8 схематично показывает блок управления согласно изобретению.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
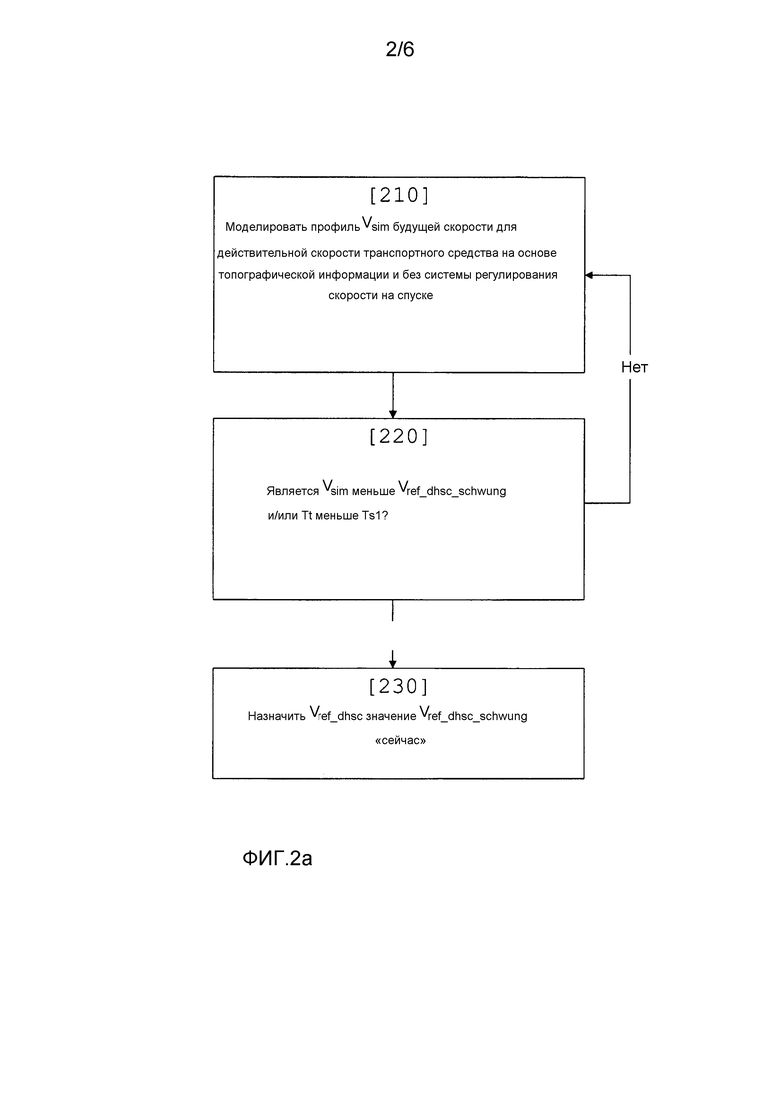
Настоящее изобретение относится к управлению опорной скоростью vref_dhsc для системы регулирования скорости на спуске в транспортном средстве в связи с уклоном спуска, которое приводит к повышенной опорной скорости vref_dhsc_schwung в конечной части уклона. Фиг. 2a показывает схематичное представление последовательности операций относительно изобретения.
На первом этапе 210 способа по настоящему изобретению, по меньшей мере, один профиль vsim будущей скорости транспортного средства моделируется для участка дороги впереди транспортного средства. Здесь участок дороги может соответствовать горизонту, который является эквивалентным участку дороги, например, в 1-2 км впереди транспортного средства в его направлении передвижения. Моделирование выполняется на основе топографической информации, которая может состоять из информации топографической съемки, объединенной с информацией позиционирования, например.
Согласно одному варианту осуществления изобретения моделирование может также основываться на игнорировании воздействия системы регулирования скорости на спуске, то есть моделирование выполняется без учета системы регулирования скорости на спуске. Другими словами, профиль vsim смоделированной скорости не будет иметь верхнего предельного значения, которое система регулирования скорости на спуске применяла бы к профилю vsim смоделированной скорости. Таким образом, для этого варианта осуществления профиль vsim смоделированной скорости не будет тормозиться по отношению к опорной скорости vref_dhsc на длинных уклонах спусков.
Второй этап 220 способа устанавливает, превышает ли профиль vsim смоделированной скорости повышенную опорную скорость vref_dhsc_schwung без воздействия системы регулирования скорости на спуске, или если время Tt нарушения, в течение которого будущая скорость vsim превышает сверхнормативную скорость vs1, является слишком длительным, то есть если время Tt нарушения, когда vsim превышает vs1, больше, чем период Ts1 нарушения. Если профиль vsim смоделированной скорости равен или больше, чем повышенная опорная скорость vref_dhsc_schwung, процесс возвращается на первый этап 210. Если профиль vsim смоделированной скорости меньше, чем повышенная опорная скорость vref_dhsc_schwung, процесс переходит на третий этап 230. Это сравнение профиля vsim смоделированной скорости и повышенной опорной скорости здесь и в этом документе относится к профилю vsim смоделированной скорости, остающемуся меньшим, чем повышенная опорная скорость vref_dhsc_schwung, по всему взятому в целом участку дороги. Это также можно рассматривать в качестве замечания, что максимальное значение для профиля vsim смоделированной скорости должно быть меньше, чем повышенная опорная скорость vref_dhsc_schwung.
Если время Tt нарушения больше, чем период Ts1 нарушения, или равен таковому, процесс возвращается на первый этап 210. Если время Tt нарушения меньше, чем период Ts1 нарушения, процесс переходит на третий этап 230. Согласно одному варианту осуществления установление использует комбинацию этих сравнений, чтобы определить, переходит ли процесс на третий этап 230. Этот способ означает оценивание, разрешается или не разрешается избыточная скорость vschwung в текущей позиции во времени “сейчас”. Если не разрешается, опорная скорость vref_dhsc не изменяется, но если правила выполняются и избыточная скорость vschwung разрешается, опорная скорость vref_dhsc устанавливается в повышенное значение vref_dhsc_schwung.
Избыточная скорость vswung может соответствовать значению того, насколько повышенная опорная скорость vref_dhsc_schwung превышает уровень, который в конечной части уклона спуска имела бы опорная скорость vref_dhsc, если повышенная опорная скорость vref_dhsc_schwung не применялась системой, то есть если система была реализована без использования повышенной опорной скорости vref_dhsc_schwung. Согласно одному варианту осуществления изобретения избыточная скорость vschwung и/или повышенная опорная скорость vref_dhsc_schwung являются предопределенными системой и согласно другому варианту осуществления избыточная скорость vschwung и/или повышенная опорная скорость vref_dhsc_schwung выбираются водителем. На третьем этапе 230 способа по изобретению опорной скорости vref_dhsc назначается повышенное значение vref_dhsc_schwung. Это назначение имеет место “сейчас”, каковое по существу означает в момент времени, когда на втором этапе было установлено, что уместно использовать повышенную опорную скорость vref_dhsc_schwung. Понятие “сейчас” соответствует промежутку времени, который содержит время, которое требуется для выполнения моделирования, принятия и повышения.
Другими словами, выполнение этапов способа по изобретению дает и повышенную опорную скорость vref_dhsc_schwung на конечной части уклона спуска, которая может иметь уровень, на который избыточная скорость vschwung превышает начальный уровень vref_dhsc_initial для опорной скорости в течение начальной части уклона спуска. Поэтому транспортное средство выйдет из уклона спуска с повышенной кинетической энергией Wk по сравнению с ранее известными решениями. Транспортные средства, использующие ранее известные решения, часто выходят из уклона после торможения транспортного средства к концу уклона, как проиллюстрировано на Фиг. 1b.
Повышенная кинетическая энергия Wk, которую согласно изобретению может получить транспортное средство в конце уклона, может через интеллектуальную систему автоматического поддержания скорости посредством системы автоматического поддержания скорости или водителя использоваться на участке дороги, следуя уклону спуска, чтобы снижать потребление топлива для транспортного средства. Кроме того, вождение транспортного средства подобным образом намного упрощает водителю и окружающему движению транспорта интуитивное понимание и усваивание, каковое повышает степень, в которой системы используются, и в то же время снижает величину связанного с торможением раздражения в движении транспорта в целом.
Топографическая информация, которая в соответствии с изобретением используется для установления одного или более профилей vsim смоделированной скорости, например, может быть получена с использованием информации позиционирования, такой как информация Глобальной системы определения местоположения (GPS) или подобных систем определения местоположения, картографической информации и/или информации топографической съемки. Информация позиционирования может указывать, где находится транспортное средство, и картографическая информация и/или информация топографической съемки может затем использоваться для установления, направляется ли транспортное средство к уклону спуска, например.
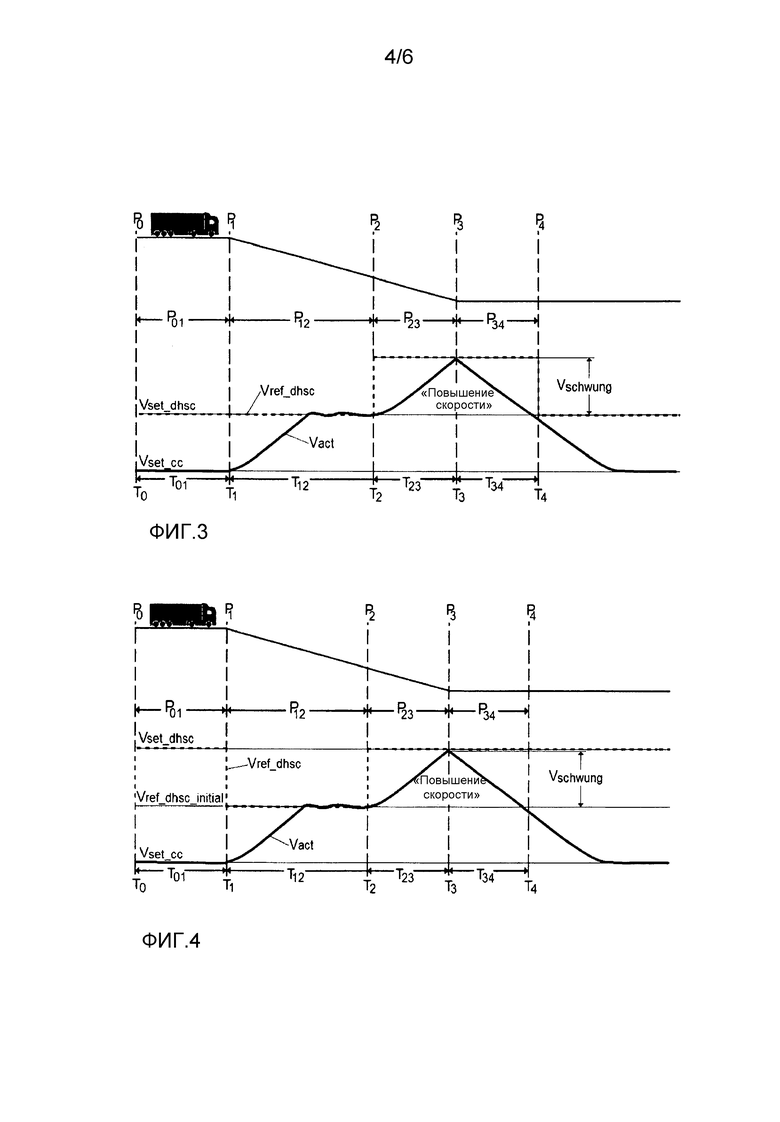
Фиг. 3 иллюстрирует неограничительный пример ситуации в вождении, соответствующей способу, описанному на Фиг. 2a. Ситуация в вождении начинается в начальный момент T0 в начальной позиции P0, где топография, то есть контур, для участка дороги, на котором находится транспортное средство, показывается в верхней части фигуры. Здесь участок дороги содержит уклон спуска. Ниже контура показывается уровень для заданной скорости vset_cc для системы автоматического поддержания скорости (сплошная линия с постоянным уровнем, например) и уровень для заданной скорости vset_dhsc для системы регулирования скорости на спуске (сплошная линия с постоянным уровнем, например). Кроме того, она иллюстрирует, каким образом опорная скорость vref_dhsc для системы регулирования скорости на спуске (пунктирная линия с переменным уровнем для примера) может изменяться относительно заданной скорости vset_dhsc для системы регулирования скорости на спуске. Действительная скорость vact транспортного средства также показывается на фигуре, указывающая, что из-за веса транспортного средства действительная скорость vact транспортного средства (сплошная жирная линия) начинает повышаться от уровня, соответствующего заданной скорости vset_cc для системы автоматического поддержания скорости, когда транспортное средство начинает скатываться по уклону спуска из начальной позиции P1 в начальный момент времени T1. Соответствующие сплошные, пунктирные и жирные линии используются также на Фиг. 4-7, чтобы иллюстрировать заданную скорость vset_cc для системы автоматического поддержания скорости, заданную скорость vset_dhsc для системы регулирования скорости на спуске, опорную скорость vref_dhsc для системы регулирования скорости на спуске и действительную скорость vact транспортного средства.
Чтобы описать поведение транспортного средства на уклоне спуска по Фиг. 3, уклон спуска был разделен на четыре промежутка времени T01, T12, T23, T34. Эти временные промежутки также содержатся и используются в описательных ситуациях в вождении на других фигурах, которые описываются ниже. Как оценят специалисты, моменты во времени и временные промежутки на этих фигурах соответствуют соответствующим позициям и расстояниям на участке дороги, на котором движется транспортное средство. Этот документ вперемежку использует моменты времени и позиции наряду с временными промежутками и расстояниями, чтобы пояснить изобретение. Следует поэтому оценить, что моменты времени и промежутки времени, а также позиции и расстояния соответственно представляют собой различные единицы, используемые для описания одной и той же последовательности событий согласно изобретению.
Начальный временной промежуток T01, соответствующий начальному расстоянию P01, длится от начального времени T0, соответствующего начальной позиции P0, до начального момента во времени T1, соответствующего начальной позиции P1. Другими словами, начальный временной промежуток T01 составляет начальное расстояние P01 до уклона спуска.
Начальный временной промежуток T12, соответствующий начальному участку P12, длится от начального момента во времени T1, соответствующего начальной позиции P1, до второго момента времени T2, соответствующего второй позиции P2. Другими словами, начальный временной промежуток T12 состоит из начальной части P12 уклона спуска.
Второй временной промежуток T23, соответствующий второму участку P23, длится от второго момента времени T2, соответствующего второй позиции P2, до третьего момента времени T3, соответствующего третьей позиции P3 в конце уклона спуска. Другими словами, второй временной промежуток T23 здесь состоит из конечного участка P23 уклона спуска.
Третий временной промежуток T34, соответствующий третьему участку P34, длится от третьего момента времени T3, соответствующего третьей позиции P3, до четвертого момента времени T4, соответствующего четвертой позиции P4, которая находится на равнине участке дороги после конца уклона спуска. Другими словами, здесь третий временной промежуток T34 соответствует участку дороги P34 после конца уклона спуска.
На Фиг. 3 заданная скорость vset_dhsc для системы регулирования скорости на спуске устанавливается в относительно низкое значение, которое является относительно близким к заданной скорости vset_cc для системы автоматического поддержания скорости. Это может, например, быть потому, что водитель здесь ввел относительно небольшую разность между заданной скоростью vset_dhsc для системы регулирования скорости на спуске и заданной скоростью vset_cc. Это может, например, также быть потому, что смещение, которое связывает заданную скорость vset_dhsc для системы регулирования скорости на спуске с заданной скоростью vset_cc для системы автоматического поддержания скорости, является относительно малым. Например, заданная скорость vset_dhsc для системы регулирования скорости на спуске может быть меньшей или равной сверхнормативной скорости vs1.
Когда транспортное средство в первый момент времени T1 достигает уклона спуска, действительная скорость vact транспортного средства увеличивается из-за веса транспортного средства от уровня, соответствующего заданной скорости vset_cc для системы автоматического поддержания скорости.
В примере, показанном на Фиг. 3, опорная скорость vref_dhsc для системы регулирования скорости на спуске равна заданной скорости vset_dhsc для системы регулирования скорости на спуске в течение начального временного промежутка T12 на начальном участке P12 уклона спуска. Поэтому действительная скорость vact транспортного средства тормозится на уровне опорной скорости vref_dhsc для системы регулирования скорости на спуске, другими словами, здесь для начального временного промежутка T12: vref_dhsc=vref_dhsc_initial=vset_dhsc.
Согласно варианту осуществления настоящего изобретения, иллюстрируемому на Фиг. 3, повышенная опорная скорость vref_dhsc_schwung=vset_dhsc+vschwung=vref_dhsc_initial+vschwung разрешается на конечном участке уклона спуска P23 и участке дороги P34, следующем после уклона спуска, начинающегося во второй позиции P2 во второй момент времени T2 и заканчивающегося в четвертой позиции P4 в четвертый момент времени T4, когда действительная скорость vact транспортного средства еще раз спадает ниже заданной скорости vset_dhsc для системы регулирования скорости на спуске, каковое приводит к изменению опорной скорости системы регулирования скорости на спуске vref_dhsc согласно Таблице 1 ниже. В четвертый момент времени T4, когда действительная скорость vact транспортного средства является меньшей, чем заданная скорость vset_dhsc для системы регулирования скорости на спуске, опорная скорость vref_dhsc системы регулирования скорости на спуске возвращается в заданное значение vref_dhsc=vset_dhsc.
Этот формат опорной скорости vref_dhsc системы регулирования скорости на спуске приводит к формату действительной скорости vact транспортного средства, показанному на Фиг. 3. Другими словами, действительная скорость vact транспортного средства достигает максимума в третий момент времени T3 в конце уклона P3 спуска, где этот пик доходит почти до повышенной опорной скорости vref_dhsc_schwung=vref_dhsc_initial+vschwung для системы регулирования скорости на спуске в третий момент времени T3. После этого действительная скорость vact транспортного средства спадает к заданной скорости vset_cc для системы автоматического поддержания скорости. Поэтому транспортное средство с избыточной скоростью vschwung имеет повышенную действительную скорость в конце уклона P3 по сравнению с заданной скоростью vset_dhsc для системы регулирования скорости на спуске, которое одновременно приводит в более короткому времени в движении, поскольку топливо экономится.
Как описано выше согласно настоящему изобретению, второй момент времени T2 устанавливается, когда опорной скорости vref_dhsc системы регулирования скорости на спуске должно задаваться ее повышенное значение vref_dhsc_schwung=vref_dhsc_initial+vschwung на основании, по меньшей мере, одного моделирования, по меньшей мере, одного профиля vsim будущей скорости для транспортного средства, где, по меньшей мере, один профиль vsim будущей скорости моделируется на основе топографической информации. Согласно одному варианту осуществления моделирование может также основываться на игнорировании воздействия, который система регулирования скорости на спуске будет оказывать на скорость. Установление момента времени T2 выполняется таким образом, что система в каждый момент времени оценивает, может ли опорной скорости назначаться ее повышенное значение vref_dhsc_schwung в данный момент, и если возможно, повышенное значение vref_dhsc_schwung назначается по существу в этот момент времени. Другими словами, система осуществляет упреждение с использованием моделирования профиля vsim будущей скорости, чтобы установить, является ли повышение соответствующим “сейчас”, то есть в прямой связи с моментом времени моделирования и установления. Чертежи обозначают момент времени, в который устанавливается, что повышение является надлежащим, в виде второго момента времени T2 или второй позиции P2.
Установление, является ли назначение повышенного значения vref_dhsc_schwung опорной скорости надлежащим, которое, можно сказать, соответствует установлению второго момента времени T2 на иллюстрациях в этой заявке, выполняется на основе сравнений профиля vsim будущей скорости с сверхнормативной скоростью vs1 и/или величиной повышенного опорного значения vref_dhsc_schwung, каковое будет описано более подробно ниже.
Путем использования настоящего изобретения повышенная опорная скорость vref_dhsc_schwung может применяться с тем, что избыточная скорость vschwung и, следовательно, действительная скорость vact транспортного средства в конце уклона могут быть максимизированными, благоприятствуя и времени в движении, и потреблению топлива.
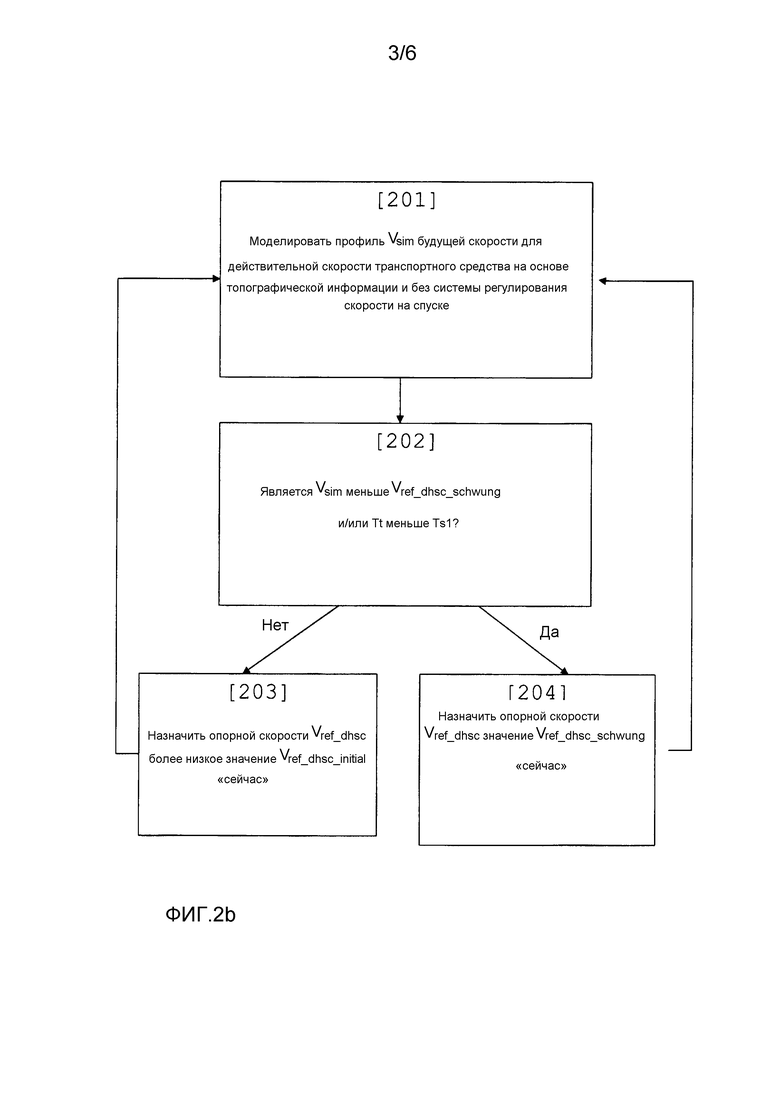
Фиг. 2b иллюстрирует блок-схему последовательности операций для одного варианта осуществления изобретения с четырьмя этапами 201, 202, 203, 204.
Фиг. 4 иллюстрирует неограничительный пример ситуации в вождении, соответствующей таковой на Фиг. 3, и в которой проиллюстрирован вариант осуществления согласно блок-схеме последовательности операций по Фиг. 2b. Ради ясности ситуация в вождении на Фиг. 4 была разделена на четыре промежутка времени подобно Фиг. 3.
На первом этапе 201 для способа настоящего варианта осуществления, по меньшей мере, один профиль vsim будущей скорости транспортного средства моделируется для участка дороги впереди транспортного средства. Моделирование выполняется, как описано выше, то есть, по меньшей мере, на основании топографической информации.
Второй этап 202 способа устанавливает, является ли профиль vsim смоделированной скорости меньшим, чем повышенная опорная скорость vref_dhsc_schwung, без воздействия системы регулирования скорости на спуске, или является ли время Tt нарушения, в течение которого будущая скорость vsim превышает сверхнормативную скорость vs1, слишком длительным, то есть является ли время Tt нарушения, когда vsim превышает vs1, более коротким, чем период Tsl нарушения. Если профиль vsim смоделированной скорости является более большим или равным повышенной опорной скорости vref_dhsc_schwung и/или если время Tt нарушения является более длительным или равным периоду Ts1 нарушения, процесс переходит на третий этап 203. На третьем этапе 203 опорной скорости vref_dhsc назначается более низкое начальное значение vref_dhsc_initial. Это назначение имеет место на Фиг. 4 в начальный момент времени T1, каковое описано более подробно ниже.
Если профиль vsim смоделированной скорости меньше, чем повышенная опорная скорость vref_dhsc_schwung, и/или если время Tt нарушения является более коротким, чем период Ts1 нарушения, процесс переходит на четвертый этап 204.
На четвертом этапе 204 опорной скорости vref_dhsc назначается повышенное значение vref_dhsc_schwung. Это назначение имеет место по Фиг. 4 во второй момент времени T2, каковое описано более подробно ниже.
В показанном на Фиг. 4 примере опорная скорость в системе регулирования скорости на спуске, vref_dhsc, в течение начального временного промежутка T01 имеет уровень, соответствующий уровню заданной скорости для системы регулирования скорости на спуске, vref_dhsc=vset_dhsc. Опорная скорость в системе регулирования скорости на спуске, vref_dhsc, затем снижается системой регулирования скорости на спуске в первый момент времени T1 в начале уклона P1 спуска до начального уровня vref_dhsc_initial, который ниже, чем уровень заданной скорости vref_dhsc для системы регулирования скорости на спуске, и сохраняет этот начальный уровень vref_dhsc_initial в течение первого временного промежутка T12 на начальном участке P12 уклона спуска. Другими словами, три начальных этапа согласно Фиг. 2b выполняются в связи с первым моментом времени T1.
Из-за этого действительная скорость vact транспортного средства тормозится на сниженном уровне vref_dhsc_initial для опорной скорости vref_dhsc для системы регулирования скорости на спуске. Одна задача позволения снижения опорной скорости до начального уровня vref_dhsc_initial, который ниже заданной скорости vref_dhsc для системы регулирования скорости на спуске, состоит в том, чтобы обеспечить в конце уклона спуска точно заданную скорость vset_dhsc, выбранную водителем, без получения предупреждений и/или нарушений превышения скорости. Другая задача этого состоит в том, чтобы позволять корректировку времени Tt нарушения, на которое профиль смоделированной будущей скорости превышает сверхнормативную скорость.
С помощью известных в прошлом систем было возможным снижать опорную скорость системы регулирования скорости на спуске в первый момент времени T1 в начале уклона P1 спуска до этого начального сниженного уровня vref_dhsc_initial, чтобы затем поддерживаться на этом начальном уровне vref_dhsc_initial по всему взятому в целом уклону спуска с тем, что водитель не рискует нарушением превышения скорости.
Вместо этого согласно настоящему изобретению повышенная опорная скорость vref_dhsc_schwung допускается в течение второго временного промежутка T23 на конечном участке уклона P23 спуска, поскольку смоделированная будущая скорость vsim во второй момент времени T2 удовлетворяет условиям на втором этапе 220 в способе, описанном на Фиг. 2a. Эта повышенная опорная скорость vref_dhsc_schwung, которая является равной заданной скорости vset_dhsc для системы регулирования скорости на спуске, затем поддерживается в третьем временном промежутке T34 и впоследствии.
Другими словами, опорная скорость vref_dhsc для системы регулирования скорости на спуске изменяется согласно Таблице 2 для различных временных промежутков для участка дороги, показанных на Фиг. 4, если используется настоящий вариант осуществления изобретения.
Как проиллюстрировано на Фиг. 4, этот формат опорной скорости vref_dhsc системы регулирования скорости на спуске приводит к действительной скорости vact транспортного средства, достигающей максимума в третий момент времени T3 в конце уклона спуска. Другими словами, действительной скорости vact транспортного средства позволяется повышаться после второго момента времени T2 до тех пор, пока действительная скорость vact транспортного средства не достигнет значения непосредственно ниже повышенной опорной скорости vref_dhsc_schwung для системы регулирования скорости на спуске в третий момент времени T3, после которого действительная скорость vact транспортного средства спадает к заданной скорости vset_cc для системы автоматического поддержания скорости. Это дает транспортному средству повышенную действительную скорость в конце уклона P3, которая повышается на избыточную скорость vschwung, поскольку повышенная опорная скорость vref_dhsc_schwung для системы регулирования скорости на спуске увеличивается на эту избыточную скорость vschwung по сравнению с начальной опорной скоростью vref_dhsc_initial, vref_dhsc_schwung=vref_dhsc_initial+vschwung. Это экономит топливо, поскольку кинетическая энергия Wk транспортного средства, которая создалась силой тяжести, может использоваться для движения вперед транспортного средства после уклона спуска.
Для того чтобы повышенной действительной скорости задавать корректный формат, то есть размер и позицию во времени/пространстве, что означает, что кинетическая энергия транспортного средства может использоваться до максимальной, должен быть установлен второй момент времени T2. Другими словами, система должна установить, когда опорной скорости vref_dhsc для системы регулирования скорости на спуске должно назначаться ее повышенное значение vref_dhsc_schwung, чтобы оптимально использовать вклад от силы тяжести, каковое также оптимизирует потребление топлива и времени в движении. Согласно изобретению это выполняется посредством системы, оценивающей для различных моментов времени, будет ли подходящим давать опорной скорости vref_dhsc повышенное значение vref_dhsc_schwung в каждый из этих моментов времени. Если это считается подходящим в один момент времени, который в этом документе иллюстрируется вторым моментом времени T2, опорной скорости vref_dhsc назначается повышенное значение vref_dhsc_schwung в данный момент времени.
Согласно настоящему изобретению второй момент времени T2 устанавливается на основе, по меньшей мере, одного моделирования, по меньшей мере, одного профиля vsim будущей скорости для транспортного средства, другими словами, на основании оценивания будущего формата действительной скорости vact для участка дороги. По меньшей мере, один профиль vsim смоделированной скорости согласно изобретению моделируется на основе топографической информации. Согласно одному варианту осуществления изобретения моделирование также выполняется на основе игнорирования системы регулирования скорости на спуске.
Затем устанавливается, когда, другими словами, в какой второй момент времени T2, избыточная скорость vschwung должна добавляться к опорной скорости системы регулирования скорости на спуске vref_dhsc, чтобы задать опорной скорости повышенное значение vref_dhsc_schwung, где это повышенное опорное значение дает повышенную действительную скорость в конце уклона P3, которая достигает этого повышенного значения для опорной скорости системы регулирования скорости на спуске vref_dhsc_schwung. Это установление зависит от величины избыточной скорости vschhwung, на которое повышается начальная опорная скорость vref_dhsc_initial, чтобы получить свое повышенное значение vref_dhsc_schwung, и/или от профиля смоделированной скорости относительно сверхнормативной скорости vs1.
Согласно одному варианту осуществления изобретения после уклона спуска на Фиг. 3 и 4, когда действительная скорость vact транспортного средства снова меньше, чем vset_dhsc, опорной скорости vref_dhsc задают ее нормальный уровень, то есть заданную скорость vset_dhsc. Кроме того, интервал торможения может использоваться здесь для того, чтобы получать безударный переход, то есть чтобы нежелательное промежуточное регулирование скорости на спуске может предотвращаться путем изменения значения опорной скорости vref_dhsc для системы регулирования скорости на спуске.
Фиг. 5 иллюстрирует, каким образом момент времени, в который опорной скорости vref_dhsc должно задаваться повышенное значение vref_dhsc_schwung, то есть второй момент времени T2, согласно одному варианту осуществления может устанавливаться в виде значения на основе одного или более правил для подачи нарушений, где эти нарушения связаны с превышениями скорости. Способ, описанный здесь, следует способу, описанному на Фиг. 2a и/или 2b.
Согласно одному правилу для подачи нарушений одно нарушение добавляется к карте цифрового тахографа в транспортном средстве, если скорость vact транспортного средства устанавливается имеющей превышение сверхнормативной скорости vsl в течение периода более длительного, чем предопределенный период Tsl нарушения. Другими словами, здесь водителю будет подано нарушение, если действительная скорость vact транспортного средства будет превышать сверхнормативную скорость в течение времени более длительного, чем период Ts1 нарушения.
На Фиг. 5 иллюстрируется неограничительный пример ситуации в вождении с соответствующей Фиг. 3 топографией, то есть содержащей уклон спуска. Информация, представленная на Фиг. 5, содержит информацию, представленную на Фиг. 3, но с иллюстрацией того, каким образом система решает, что опорной скорости vref_dhsc должно задаваться повышенное значение vref_dhsc_schwung во второй момент времени T2.
Согласно варианту осуществления второй момент времени T2 устанавливается на основе одного или более моделирований будущей скорости транспортного средства vsim путем установления длительности всякого времени Tt нарушения. Здесь время Tt нарушения соответствует времени, которое моделирование будущей скорости vsim транспортного средства вычисляет, чтобы превышать сверхнормативную скорость vs1 в связи с упомянутым уклоном спуска, более конкретно - в течение второго T23 и третьего T34 временных промежутков в этом примере. Здесь смоделированное время Tt нарушения сравнивается с периодом Ts1 нарушения, который составляет ограничение по времени, с которым дается предупреждение и/или нарушение превышения скорости.
Если время Tt нарушения меньше, чем период Ts1 нарушения, Tt<Ts1, как показано на Фиг. 5, преходящая избыточная скорость является приемлемой, и опорной скорости vref_dhsc дается повышенное значение vref_dhsc_schwung во второй момент времени.
Если вместо этого время Tt нарушения является более большим или равным периоду Ts1 нарушения, Tt≥Ts1, временная избыточная скорость vschwung не является приемлемой, и новое моделирование выполняется позже во времени, например, в порядке возрастания через 1 секунду или 20 метров после предыдущего моделирования. Другими словами, выполняется новое моделирование, и если, например, транспортное средство приближается к концу уклона спуска и новое время Tt нарушения для нового моделирования меньше, чем предыдущее время Tt нарушения, сравнение нового времени нарушения с периодом Ts1 нарушения может приводить к заданию опорной скорости vref_dhsc повышенного значения vref_dhsc_schwung при выполнении нового моделирования.
Другими словами, согласно этому варианту осуществления второй момент времени T2 устанавливается в виде значения с тем, что скорость vact транспортного средства вычисляют превышающей сверхнормативную скорость vs1 в течение более короткого времени, чем предопределенный период Ts1 нарушения. Поскольку сверхнормативная скорость vs1 и период Ts1 нарушения являются известными и профиль vsim будущей скорости может быть смоделирован, T2 также может быть вычислено на их основании с тем, что избыточная скорость, и таким образом также кинетическая энергия Wk, могли быть максимизированными в конце уклона T3, одновременно гарантируя, что какое-либо нарушение не дается, то есть нет нарушения, которое регистрируется в карте цифрового тахографа.
Согласно одному варианту осуществления изобретения величина преходящей избыточной скорости vschwung устанавливается таким образом, что повышенная опорная скорость vref_dhsc_schwung по существу равна действительной скорости vact транспортного средства, допускаемой на основе результата моделирования будущей скорости vsim транспортного средства, без нарушения правил для задания нарушений, связанных с превышениями скорости.
Согласно одному варианту осуществления изобретения водителю транспортного средства дается предупреждение, если скорость vact транспортного средства превышает сверхнормативную скорость vs1 в течение времени Tt нарушения, более длительного, чем период Ts1 нарушения.
Согласно одному варианту осуществления изобретения это правило относительно того, когда даются предупреждения, может использоваться подобно использованию правила для регистрации нарушения в карте цифрового тахографа, чтобы устанавливать второй момент времени T2, когда опорной скорости vref_dhsc дается ее повышенное значение vref_dhsc_schwung.
Согласно этому варианту осуществления второй момент времени T2 устанавливается в виде значения такого, что смоделированная скорость vsim транспортного средства моделируется, чтобы превышать сверхнормативную скорость vs1 в течение более короткого времени, чем предопределенный период Ts1 нарушения, следовательно, нет необходимости давать предупреждение водителю. Поэтому избыточная скорость может быть максимизированной в конце уклона T3, одновременно гарантируя, что предупреждение не дается водителю, что означает возможность избежания риска панического торможения в конечном участке уклона, как показано на Фиг. 1b.
Согласно одному варианту осуществления изобретения назначение повышенной опорной скорости vref_dhsc_schwung для опорной скорости vref_dhsc имеет место, если смоделированный профиль vsim будущей скорости согласно моделированию является меньшим, чем сверхнормативная скорость vs1.
Это назначение может выполняться на основе, по меньшей мере, одного сравнения в, по меньшей мере, один момент времени и текущий момент времени для времени Tt нарушения, в течение которого смоделированный профиль vsim будущей скорости согласно моделированию будет превышать упомянутую сверхнормативную скорость vs1 в течение предопределенного периода Ts1 нарушения. Если время нарушения Tt является более коротким, чем период Ts1 нарушения, назначение происходит здесь.
Фиг. 6 иллюстрирует более подробное осуществление изобретения для установления момента времени для назначения повышенной опорной скорости vref_dhsc_schwung для опорной скорости vref_dhsc, согласно которому делается сравнение предопределенного периода Ts1 нарушения, описанного выше, и, по меньшей мере, одного смоделированного времени Tt нарушения, когда прогнозируется, что vs1 будет превышенной. Фиг. 6 иллюстрирует три различных времени нарушения Tt0, Tt1 и Tt2, которые связаны с тремя различными моментами времени t0, t1 и t2 соответственно. Каждое из времен нарушения, Tt0, Tt1 и Tt2, основаны на отдельных моделированиях будущей скорости транспортного средства vsim_t0, vsim_tl и vsim_t2, которые основываются на действительной скорости vact транспортного средства в трех различных моментах во времени t0, t1 и t2 соответственно. Это сравнение затем может использоваться для установления, должно ли опорной скорости vref_dhsc даваться ее повышенное значение vref_dhsc_schwung в какой-либо из трех различных моментов времени t0, t1 и t2 соответственно. Другими словами, это сравнение используется для установления второго момента времени T2, который происходит, когда опорную скорость vref_dhsc устанавливают в ее повышенное значение vref_dhsc_schwung.
Согласно варианту осуществления, иллюстрируемому на Фиг. 6 и который следует блок-схеме последовательности операций на Фиг. 2a, эти сравнения могут выполняться на первом этапе 210 в текущей точке во времени/позиции для транспортного средства, когда t=t0, обозначенной “текущая ситуация” на Фиг. 6, путем оценивания первого профиля vsim_t0 будущей скорости для перемещения транспортного средства вниз и после уклона. Затем, на втором этапе 220, первое время Tt0 нарушения, в течение которого первый профиль vsim_t0 будущей скорости прогнозируется для превышения сверхнормативной скорости vs1, сравнивается с периодом Ts1 нарушения.
Если первое время Tt0 нарушения является более коротким, чем период Ts1 нарушения, то есть если Tt0<Ts1, на третьем этапе 230 в текущей точке во времени/позиции, опорную скорость vref_dhsc устанавливают в ее повышенное значение vref_dhsc_schwung, поскольку это повышение не будет приводить к нарушению/предупреждению. Текущая точка во времени/позиции t0 для транспортного средства затем соответствует второму моменту времени T2.
Если, с другой стороны, первое время Tt0 нарушения является более длительным или равным периоду Ts1 нарушения, то есть если Tt0≥Ts1, то не принимается решение повышать опорную скорость для системы регулирования скорости на спуске vref_dhsc в момент времени t=t0.
Вместо этого в момент времени t=t1 выполняется дополнительное моделирование профиля будущей скорости для будущей скорости транспортного средства vsim_t1 на основании нового текущего положения транспортного средства. Другими словами, вплоть до следующего моделирования в t=t1 транспортное средство ведут произвольное подходящее время/расстояние от точки во времени/позиции, когда t=t0, где время/расстояние между t0 и t1 может быть величиной порядка 1 секунды или 20 метров, например.
В этой добавочной текущей позиции оценивают дополнительный профиль vsim_tl будущей скорости.
Затем дополнительное время Tt1 нарушения, в течение которого дополнительный профиль vsim_t1 смоделированной скорости прогнозируется для превышения сверхнормативной скорости vs1, сравнивается с периодом Ts1 нарушения. Если сравнение показывает, что дополнительное время Tt1 нарушения является более коротким, чем период Ts1 нарушения, Tt1<Ts1, опорная скорость vref_dhsc системы регулирования скорости на спуске устанавливается в повышенное значение vref_dhsc_schwung от точки и включая точку во времени/позиции t=t1, на которой основывается дополнительное моделирование vsim_t1.
Если вместо этого сравнение показывает, что дополнительное время Tt1 нарушения является более длительным или равным периоду Ts1 нарушения, Tt1≥Ts1, дополнительный профиль vsim_t2 будущей скорости моделируется в дополнительной текущей точке во времени/позиции t=t2. В точке во времени/позиции t=t2 транспортное средство вели произвольное подходящее время/расстояние величиной порядка 20 метров, например ближе к концу уклона. В этой новой дополнительной точке во времени/позиции t=t2 моделируют дополнительный профиль vsim_t2 будущей скорости, который используется для того, чтобы, как описано выше, сравнивать дополнительное время Tt2 нарушения для дополнительного профиля vsim_t2 смоделированной скорости с периодом Ts1 нарушения.
Если сравнение показывает, что дополнительное время Tt2 нарушения является более коротким, чем период Ts1 нарушения, Tt2<Ts1, опорная скорость vref_dhsc системы регулирования скорости на спуске устанавливается в повышенное значение vref_dhsc_schwung от точки и включая точку во времени/позиции t=t2, на которой основывается дополнительное моделирование vsim_t2. Другими словами, второй момент времени T2 соответствует дополнительному моменту времени t2, T2=t2. В примере, показанном на Фиг. 6, дело обстоит именно так, поясненное обозначением T2 на Фиг. 6 в виде T2,t2. Если результатом вместо этого было Tt2≥Ts1, алгоритм продолжался бы таким же образом до тех пор, пока второй момент времени T2 не может быть установлен в качестве более поздней “текущей” позиции. Другими словами, T2,t2 на Фиг. 6 указывает момент времени, когда опорная скорость vref_dhsc устанавливается в повышенное значение vref_dhsc_schwung, каковое происходит, когда дополнительное моделирование vsim_t2 удовлетворяет требованиям второго этапа 220 по Фиг. 2a.
Этот вариант осуществления описывает эффективный способ вычисления для установления, когда опорной скорости vref_dhsc должно даваться ее повышенное значение vref_dhsc_schwung, каковое вносит немного сложности в системе. Кроме того, алгоритм является устойчивым относительно непредвиденных обстоятельств, таких как неожиданное торможение в начале уклона спуска, поскольку момент времени для того, когда опорная скорость vref_dhsc должна быть установлена в свое повышенное значение vref_dhsc_schwung, не устанавливается до достижения уклона спуска, но всегда устанавливается на основе того, как выглядят моделирования в текущей ситуации, то есть в каждый момент дискретного моделирования.
Согласно одному варианту осуществления изобретения точка во времени/позиции транспортного средства, когда t=t0, то есть “текущая ситуация”, или понятие “сейчас”, используемое в этом документе, задается добавлением времени опережения, например 1 секунды, перед фактической точкой во времени/позиции транспортного средства. Это означает, что моделирования всегда принимают решения на основании текущих данных.
Согласно одному варианту осуществления настоящего изобретения опорной скоростью vref_dhsc для системы регулирования скорости на спуске также управляют в течение первого временного промежутка T12 в некоторых обстоятельствах. Здесь, например, опорной скоростью vref_dhsc для системы регулирования скорости на спуске управляют на основе выбранной водителем заданной скорости vset_dhsc для системы регулирования скорости на спуске таким образом, что опорная скорость vref_dhsc обычно следует заданной скорости vset_dhsc. Опорной скоростью vref_dhsc можно также управлять с возможностью отклонения от заданной скорости vset_dhsc в некоторых обстоятельствах.
Согласно одному варианту осуществления изобретения опорная скорость vref_dhsc для системы регулирования скорости на спуске снижается до ниже заданной скорости vset_dhsc для системы регулирования скорости на спуске, если смоделированный профиль vsim будущей скорости указывает, что действительная скорость vact транспортного средства будет превышать сверхнормативную скорость vs1 в связи с уклоном спуска. Это снижение происходит до назначения повышенной опорной скорости vref_dhsc_schwung.
Согласно одному варианту осуществления опорная скорость vref_dhsc снижается до ниже заданной скорости vset_dhsc в течение первого временного промежутка T12 в начале уклона, если смоделированный профиль vsim будущей скорости указывает, что она будет превышать сверхнормативную скорость vs1 в течение, по меньшей мере, предопределенного периода Ts1 нарушения в связи с уклоном спуска. Другими словами, опорная скорость vref_dhsc снижается здесь ниже заданной скорости vset_dhsc в течение первого временного промежутка T12, если профиль vsim будущей скорости указывает, что может даваться нарушение и/или предупреждение, каковое уменьшает риск выдачи нарушения и/или предупреждения. Например, этот вариант осуществления показывается на Фиг. 5.
Согласно одному варианту осуществления опорная скорость vref_dhsc снижается до ниже заданной скорости vset_dhsc в течение первого временного промежутка T12, если смоделированный профиль vsim будущей скорости указывает, что она будет превышать повышенную опорную скорость vref_dhsc_schwung на уклоне спуска, например, в течение, по меньшей мере, предопределенного периода Ts1 нарушения в связи с уклоном спуска. Другими словами, опорная скорость vref_dhsc_schwung снижается в начале уклона, если профиль vsim будущей скорости указывает, что повышенная опорная скорость vref_dhsc_schwung будет превышена, каковое уменьшает риск водителя с торможением вручную, как показано на Фиг.1b, и также уменьшает риск выдаваемого нарушения и/или предупреждения. Например, этот вариант осуществления показывается на Фиг. 4.
По настоящему изобретению, по меньшей мере, один профиль vsim будущей скорости моделируется на основе топографической информации и на одной величине для избыточной скорости vschwung. Согласно одному варианту осуществления изобретения величина этой избыточной скорости vschwung устанавливается такой, что повышенная опорная скорость vref_dhsc_schwung для системы регулирования скорости на спуске является по существу такой же, как заданная скорость vset_dhsc для системы регулирования скорости на спуске. Это вариант осуществления иллюстрируется, например, на Фиг. 4 и 5, на котоых начальная опорная скорость vref_dhsc_initial снижается относительно заданной скорости vset_dhsc в течение первого временного промежутка T12, и затем во второй момент времени T2 дается повышенное значение, которое соответствует значению заданной скорости vset_dhsc.
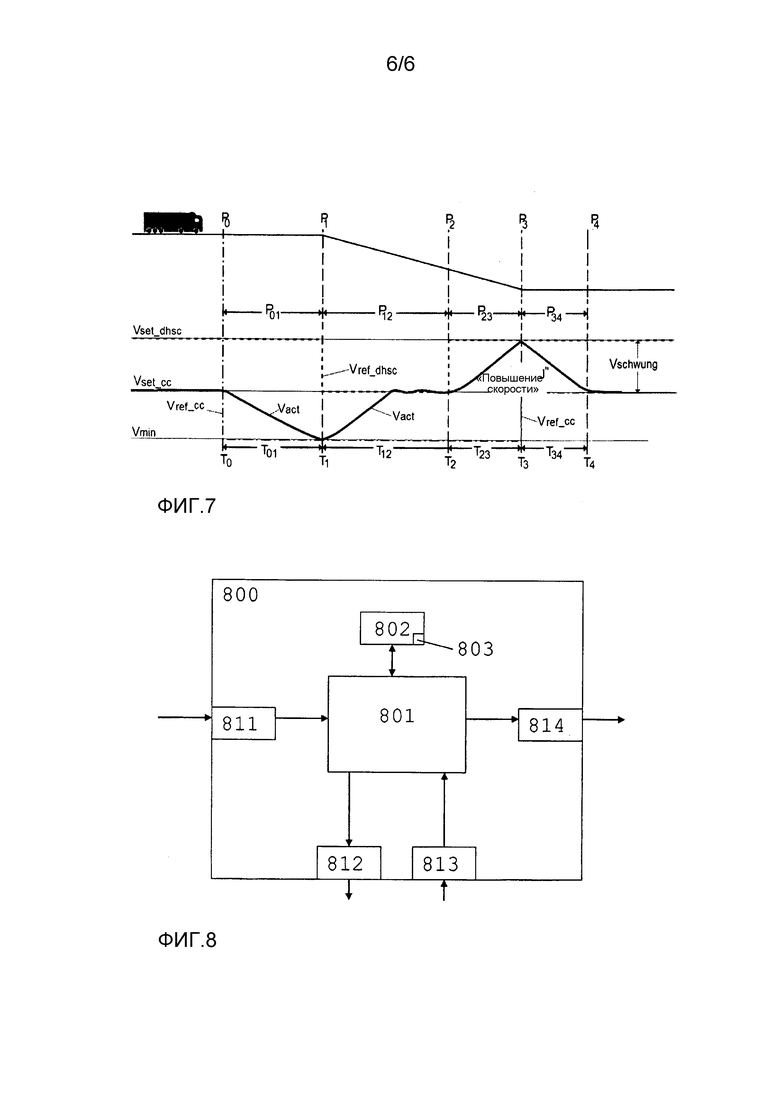
Согласно одному варианту осуществления изобретения в течение первого участка уклона спуска опорная скорость для системы регулирования скорости на спуске, vref_dhsc, другими словами, в течение первого временного промежутка T12, примет начальное значение опорной скорости vref_dhsc_initial, которая здесь соответствует заданной скорости vset_cc для системы автоматического поддержания скорости vsez_cc, движущей транспортное средство, когда опорная скорость vref_cc для системы автоматического поддержания скорости, движущей транспортной средство, является меньшей, чем vset_cc. Если опорная скорость vref_cc будет меньше, чем заданная скорость vset_cc для системы автоматического поддержания скорости, то система автоматического поддержания скорости снизит скорость транспортного средства до уклона спуска. Другими словами, система автоматического поддержания скорости, движущая транспортное средство, имеет упреждающий тип.
Это проиллюстрировано на Фиг. 7, на которой опорная скорость vref_dhsc для системы регулирования скорости на спуске в течение первого временного промежутка T12 является по существу такой же, как заданная скорость vset_cc для системы автоматического поддержания скорости. Другими словами, здесь начальное значение опорной скорости vref_dhsc_initial является таким же, как заданная скорость vset_cc для системы автоматического поддержания скорости в течение первого временного промежутка T12, как описано выше для Фиг. 2b.
В соответствии со способом согласно варианту осуществления, иллюстрируемому на Фиг. 2b, опорная скорость vref_dhsc от системы регулирования скорости на спуске будет такой же, как это начальное значение для опорной скорости vref_dhsc_initial, пока удовлетворяется условие на втором этапе 202, то есть до тех пор, пока vsim<vref_dhsc_schwung и/или Tt<Ts1.
Другими словами, повышенная опорная скорость vref_dhsc_schwung будет получена во второй момент времени T2, поскольку смоделированный профиль vsim будущей скорости затем указывает, что транспортное средство не достигнет преходящей повышенной опорной скорости vref_dhsc_schwung, которая может быть указана системой или водителем, и/или что время Tt нарушения, поскольку моделирование профиля vsim будущей скорости больше, чем сверхнормативная скорость vs1, не превышает период Ts1 нарушения.
Чтобы снизить риск необходимости вмешательства водителя после уклона спуска из-за являющегося слишком коротким расстояния впереди транспортного средства, опорная скорость для системы регулирования скорости на спуске vref_dhsc будет такой же, как заданная скорость vset_cc для системы автоматического поддержания скорости на длинных уклонах со спуском. Это обычно означает, что расстояние до транспортного средства впереди возрастает перед уклоном спуска, каковое, в свою очередь, позволяет преходящее повышение скорости в конце уклона спуска.
Согласно одному варианту осуществления изобретения величина избыточной скорости vschwung зависит от опорной скорости vref_cc системы автоматического поддержания скорости с управлением опорной скоростью, причем опорная скорость vref_dhsc учитывает регулирование системы автоматического поддержания скорости своей опорной скорости vref_cc. Другими словами, это может означать, что начальное значение для опорной скорости vref_dhsc_initial не является по величине таким же, как заданная скорость vset_cc для системы автоматического поддержания скорости.
Согласно одному варианту осуществления повышенное значение опорной скорости для системы регулирования скорости на спуске vref_dhsc_schwung связано с заданной скоростью vset_cc для системы автоматического поддержания скорости с постоянным (коэффициентом) C, то есть vref_dhsc_schwung=C*vset_cc, где C имеет предопределенное значение, например 1,06.
Связь величины избыточной скорости vschwung с заданной скоростью или опорной скоростью для системы автоматического поддержания скорости достигает весьма благоприятного профиля для действительной скорости vact транспортного средства. Это иллюстрируется в примере на Фиг. 7, в котором управление опорной скоростью vref_dhsc для системы регулирования скорости на спуске координируется с функцией системы автоматического поддержания скорости с управлением опорной скоростью.
Например, система автоматического поддержания скорости с управлением опорной скоростью может снижать опорную скорость vref_cc по сравнению со своей заданной скоростью vset_cc до уклона спуска, что означает, что действительная скорость vact спадает до уклона спуска, как показано на Фиг. 7 (где опорная скорость vref_cc представлена пунктирной линией). Система автоматического поддержания скорости с управлением опорной скоростью может затем использовать ускорение транспортного средства, обусловленное его весом, на уклоне спуска, чтобы экономить топливо. Когда учитывается эта функция в системе автоматического поддержания скорости с управлением опорной скоростью при управлении опорной скоростью vref_dhsc для системы регулирования скорости на спуске, величина повышенной опорной скорости vref_dhsc_schwung для системы регулирования скорости на спуске может быть максимизированной. Например, здесь опорная скорость vref_dhsc для системы регулирования скорости на спуске может быть установлена такой же, как заданная скорость vset_cc для системы автоматического поддержания скорости с управлением опорной скоростью, vref_dhsc=vset_cc, в течение начального периода T12 уклона спуска, как проиллюстрировано на Фиг. 7. Это обеспечивает мягкий переход от использования крутящего момента двигателя к торможению.
Повышенная опорная скорость vref_dhsc_schwung, которую получают с использованием настоящего изобретения, приводит, как описано выше, к повышенной действительной скорости транспортного средства в конце уклона спуска, что также означает повышенную кинетическую энергию Wk для транспортного средства.
Повышенная опорная скорость vref_dhsc_schwung может приводить к одному или более действиям, выполняемым в транспортном средстве, поскольку разрешается повышенная действительная скорость. Такие действия содержат уменьшение величины тормозного усилия, выполняется смена передачи на более высокую, выполняется переключение передачи на нейтраль и выполняется переход к торможению двигателем.
Согласно одному варианту осуществления изобретения повышенная опорная скорость vref_dhsc_schwung поддерживается до тех пор, пока действительная скорость vact транспортного средства является большей или равной заданной скорости vset_dhsc для системы регулирования скорости на спуске. Другими словами, опорная скорость vref_dhsc возвращается из своего повышенного значения vref_dhsc_schwung, когда действительная скорость vact транспортного средства еще раз становится меньше, чем заданная скорость vset_dhsc для системы регулирования скорости на спуске.
Специалисты оценят, что способ управления опорной скорости vref_dhsc для системы регулирования скорости на спуске согласно настоящему изобретению может также быть реализован в компьютерной программе, которая при исполнении в компьютере приведет к выполнению способа компьютером. Компьютерная программа обычно содержит компьютерный программный продукт (803 на Фиг. 8), хранимый на цифровом носителе, причем компьютерная программа включена в читаемый компьютером носитель компьютерного программного продукта. Упомянутый читаемый компьютером носитель содержит подходящую память, такую как: постоянное запоминающее устройство (ROM), программируемое постоянное запоминающее устройство (PROM), стираемое программируемое постоянное запоминающее устройство (EPROM), флэш-память, электрически-стираемое программируемое запоминающее устройство (EEPROM), накопитель на жестком диске и т.д.
Согласно одному аспекту настоящего изобретения обеспечивается система для управления опорной скоростью vcef_dhsc для системы регулирования скорости на спуске в транспортном средстве в связи с уклоном спуска. Система выполнена с возможностью обеспечивать повышенную опорную скорость vref_dhsc_schwung на конечном участке уклона спуска в течение второго T23 и третьего T34 временного промежутка.
Согласно настоящему изобретению система содержит блок моделирования, который выполнен с возможностью моделировать, по меньшей мере, один профиль vsim будущей скорости для действительной скорости транспортного средства по участку дороги впереди транспортного средства. Этот, по меньшей мере, один профиль vsim будущий скорости основывается на топографической информации.
Согласно одному варианту осуществления изобретения, по меньшей мере, один профиль vsim будущей скорости основывается на игнорировании любого возможного воздействия, которое система регулирования скорости на спуске может оказывать на профиль vsim скорости. Другими словами, для этого варианта осуществления не учитывается функция системы регулирования скорости на спуске в течение моделирования.
Система также содержит блок установления, который выполнен с возможностью устанавливать, должно ли опорной скорости Vref_dhsc назначаться ее повышенное значение vref_dhsc_schwung. Это установление выполняется на основе сравнения смоделированного профиля vsim будущей скорости с допустимой величиной повышенной опорной скорости vcef_dhsc_schwung и/или с сверхнормативной скоростью vs1. Другими словами, сравнение можно делать с повышенной опорной скоростью vref_dhsc_schwung самой по себе, со сверхнормативной скоростью vs1 самой по себе или путем комбинации этих сравнений.
Кроме того, система содержит блок назначения, который выполнен с возможностью повышать опорную скорость vref_dhsc до ее повышенного значения vref_dhsc_schwung, если блок установления установил, что это должно иметь место. Моделирование, установление и повышение происходят “сейчас”, каковое по существу означает «в момент времени установления», где этот промежуток времени содержит время, затраченное на моделирование, определение и повышение.
Здесь согласно одному варианту осуществления повышенная опорная скорость vref_dhsc_schwung может иметь уровень, который вместе с избыточной скоростью vschwung превышает начальный уровень vref_dhsc_initial опорной скорости на первом участке упомянутого уклона спуска в течение первого временного промежутка T12, как показано на Фиг. 4, 5 и 7.
Фиг. 8 схематично иллюстрирует блок 800 управления. Блок 800 управления содержит блок 801 вычисления, который может по существу содержать подходящий тип процессора или микрокомпьютера, например схему для цифровой обработки сигналов (Цифровой процессор сигналов, DSP) или схему с предопределенной конкретной функцией (Специализированная интегральная схема, ASIC). Блок 801 вычисления подключен к устройству 802 хранения данных, выполненному в блоке 800 управления, который обеспечивает блок 801 вычисления хранимым кодом программы и/или хранимыми данными, которые необходимы блоку 801 вычисления для выполнения вычислений. Блок 801 вычисления также выполнен с возможностью сохранять частичные результаты или конечные результаты вычислений в устройстве 802 хранения данных.
Кроме того, блок 800 управления оснащен устройствами 811, 812, 813, 814 для приема и передачи входных и выходных сигналов. Эти входные и выходные сигналы могут содержать волны, импульсы или другие атрибуты, которые устройства 811, 813 для приема входных сигналов могут обнаруживать в качестве информации, и могут преобразовываться в сигналы, которые могут быть обработаны модулем 801 вычисления. Эти сигналы затем предоставляются на блок 801 вычисления. Устройства 812, 814 для передачи выходных сигналов выполнены с возможностью преобразовывать сигналы, полученные от модуля 801 вычисления, чтобы создавать выходные сигналы, например, путем модулирования сигналов, которые могут передаваться на другие части системы для управления опорной скоростью vref_dhsc для системы регулирования скорости на спуске.
Каждое из соединений с устройствами для приема и передачи входных и выходных сигналов может содержать одно или более из следующего: кабеля, шины данных, такой как шина CAN (шина контроллерной сети), шины MOST (оптическая шина для передачи мультимедийной информации в автомобильной системе, Media Orientated Systems Transport bus) или некоторой другой конфигурации шины. Или соединение может быть беспроводным.
Специалист оценит, что вышеупомянутый компьютер может содержать блок 801 вычисления и что вышеупомянутая память может содержать устройство 802 хранения данных.
Специалист также оценит, что вышеупомянутая система может модифицироваться согласно различным вариантам осуществления способа по изобретению. Кроме того, изобретение относится к автотранспортному средству, например грузовику или автобусу, содержащему, по меньшей мере, одну систему для управления опорной скоростью vref_dhsc для системы регулирования скорости на спуске согласно изобретению.
Настоящее изобретение не ограничивается вариантами осуществления изобретения, описанными выше, оно относится ко всем вариантам осуществления и содержит таковые в рамках объема прилагаемых независимых пунктов формулы изобретения.


Заявленное изобретение относится к способу и системе для управления опорной скоростью транспортного средства. Система регулирования скорости на спуске в транспортном средстве в связи с уклоном спуска, который приводит к повышенной опорной скорости в конечной части упомянутого уклона, может изменять опорную скорость. Для этого система моделирует по меньшей мере один профиль будущей скорости для действительной скорости на участке дороги впереди. Моделирование основывается на топографической информации. Система содержит блок установления, который устанавливает, должна ли упомянутой опорной скорости назначаться повышенная опорная скорость. Установление основывается на сравнении смоделированного профиля будущей скорости с допустимой величиной для повышенной опорной скорости и/или со сверхнормативной скоростью. Система содержит блок назначения, который назначает повышенную опорную скорость упомянутой опорной скорости, если было установлено, что это необходимо. Достигается повышение безопасности управления транспортным средством. 2 н. и 22 з.п. ф-лы, 2 табл., 10 ил.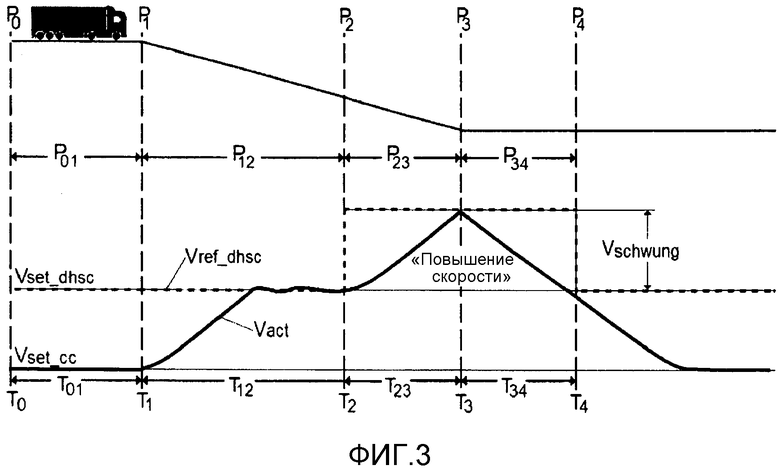
1. Способ для управления опорной скоростью vref_dhsc для системы регулирования скорости на спуске в транспортном средстве в связи с уклоном спуска, который приводит к повышенной опорной скорости vref_dhsc_schwung в конечной части упомянутого уклона, отличающийся
- моделированием по меньшей мере одного профиля vsim будущей скорости для действительной скорости для упомянутого транспортного средства на участке дороги впереди упомянутого транспортного средства, причем упомянутое моделирование основывается на топографической информации,
- установлением, должна ли упомянутой опорной скорости vref_dhsc назначаться упомянутая повышенная опорная скорость vref_dhsc_schwung, причем упомянутое установление основывается на сравнении упомянутого смоделированного профиля vsim будущей скорости с допустимой величиной для упомянутой повышенной опорной скорости vref_dhsc_schwung и/или со сверхнормативной скоростью vs1, и
- назначением упомянутой повышенной опорной скорости vref_dhsc_schwung упомянутой опорной скорости vref_dhsc, если это было установлено.
2. Способ по п. 1, в котором упомянутое установление также вычисляют на основе правила для подачи нарушений, связанных с превышениями допустимой скорости.
3. Способ по п. 2, в котором упомянутое правило подачи нарушений помещает нарушение в тахограф в упомянутом транспортном средстве, если действительная скорость vact транспортного средства превышает сверхнормативную скорость vs1 в течение предопределенного периода Ts1 нарушения.
4. Способ по п. 2, в котором предупреждение дается водителю упомянутого транспортного средства о том, что действительная скорость vact транспортного средства превышает сверхнормативную скорость vs1 в течение предопределенного периода Ts1 нарушения.
5. Способ по любому из пп. 1-4, в котором упомянутая опорная скорость vref_dhsc для упомянутой системы регулирования скорости на спуске является управляемой на основе выбранной заданной скорости vset_dhsc для упомянутой системы регулирования скорости на спуске.
6. Способ по п. 5, в котором упомянутая опорная скорость vref_dhsc для системы регулирования скорости на спуске, до имеющего место упомянутого назначения упомянутой повышенной опорной скорости vref_dhsc_schwung, снижается ниже упомянутой заданной скорости vset_dhsc для упомянутой системы регулирования скорости на спуске, если упомянутый смоделированный профиль vsim будущей скорости указывает, что действительная скорость vact транспортного средства будет превышать сверхнормативную скорость vsl в течение по меньшей мере предопределенного периода Ts1 нарушения в связи с упомянутым уклоном спуска.
7. Способ по п. 6, в котором величина упомянутой повышенной опорной скорости vref_dhsc_schwung для упомянутой системы регулирования скорости на спуске устанавливается по существу такой же, как упомянутая заданная скорость vset_dhsc для упомянутой системы регулирования скорости на спуске.
8. Способ по любому из пп. 1-4 или 6, в котором величина упомянутой повышенной опорной скорости vref_dhsc_schwung для упомянутой системы регулирования скорости на спуске устанавливается по существу такой же, какую допускается иметь действительной скорости vact транспортного средства без нарушения правила для подачи нарушений, связанных с нарушениями допустимой скорости.
9. Способ по любому из пп. 1-4 или 6, в котором упомянутое назначение упомянутой повышенной опорной скорости vref_dhsc_schwung для упомянутой опорной скорости vref_dhsc имеет место, когда упомянутый смоделированный профиль vsim будущей скорости согласно моделированию будет меньше, чем упомянутая сверхнормативная скорость vs1.
10. Способ по п. 9, в котором упомянутое назначение содержит по меньшей мере одно сравнение по меньшей мере в один момент времени и текущий момент времени для времени Tt нарушения, в течение которого упомянутый смоделированный профиль vsim будущей скорости согласно моделированию будет превышать упомянутую сверхнормативную скорость vs1 в течение предопределенного периода Ts1 нарушения.
11. Способ по любому из пп. 1-4 или 6, в котором установление второго момента времени T2, когда упомянутое назначение упомянутой повышенной опорной скорости vref_dhsc_schwung для упомянутой опорной скорости vref_dhsc имеет место, содержит сравнение времени Tt нарушения, в течение которого упомянутый смоделированный профиль vsim будущей скорости согласно моделированию будет превышать упомянутую сверхнормативную скорость vs1 в течение предопределенного периода Ts1 нарушения.
12. Способ по п. 11, в котором установление упомянутого второго момента времени T2 содержит этапы, чтобы:
- в текущий момент времени t0 для упомянутого транспортного средства моделировать первый профиль vsim_t0 будущей скорости для упомянутого транспортного средства,
- сравнивать первое время Tt0 нарушения с упомянутым периодом Ts1 нарушения, причем упомянутое первое время Tt0 нарушения соответствует времени, когда первый профиль vsim_t0 будущей скорости моделируется для превышения упомянутой сверхнормативной скорости vs1, причем:
- если упомянутое первое время Tt0 нарушения является более коротким, чем упомянутый период Ts1 нарушения, Tt0<Ts1, установить упомянутый второй момент времени T2 в упомянутую текущую позицию, T2=t0, и
- если упомянутое первое время Tt0 нарушения является равным или более длительным, чем упомянутый период Ts1 нарушения, Tt0>Ts1, оставить упомянутую опорную скорость vref_dhsc неизменной и выполнить по меньшей мере одно дополнительное моделирование профиля vsim_t1, vsim_t2 будущей скорости для упомянутого транспортного средства, которое основывается на дополнительном текущем моменте времени t1, t2, к которому переместилось транспортное средство с упомянутой текущей позиции t0,
- сравнивать по меньшей мере одно дополнительное время Tt1, Tt2 нарушения с упомянутым периодом Ts1 нарушения, причем упомянутое по меньшей мере одно дополнительное время Tt1, Tt2 нарушения соответствует времени, когда моделируется первый профиль vsim_t0 будущей скорости для превышения упомянутой сверхнормативной скорости vsi, при этом:
- если упомянутое по меньшей мере одно дополнительное время Tt1, Tt2 нарушения является более коротким, чем упомянутый период Ts1 нарушения, Tt1<Ts1 или Tt2<Ts1, установить упомянутый второй момент времени T2 в позицию упомянутого текущего момента времени, T2=t1 или T2=t2, и
- если упомянутое по меньшей мере одно дополнительное время Tt1, Tt2 нарушения является равным или более длительным, чем упомянутый период Ts1 нарушения, Tt1>Ts1 или Tt2>Ts1, оставить упомянутую опорную скорость vref_dhsc неизменной и выполнить по меньшей мере одно дополнительное моделирование профиля будущей скорости.
13. Способ по п. 1, в котором упомянутая опорная скорость vref_dhsc назначается упомянутой повышенной опорной скорости vref_dhsc_schwung, если упомянутый смоделированный профиль vsim будущей скорости остается меньше, чем упомянутая повышенная опорная скорость vref_dhsc_schwung.
14. Способ по любому из пп. 1-4, в котором упомянутое регулирование упомянутой опорной скорости vref_dhsc координируют с регулированием, выполняемым системой автоматического поддержания скорости с тем, что упомянутую опорную скорость vref_dhsc устанавливают в значение, соответствующее заданной скорости vset_cc для упомянутой системы автоматического поддержания скорости.
15. Способ по любому из пп. 1-4, 6, 12 или 13, в котором упомянутое регулирование упомянутой опорной скорости vref_dhsc для упомянутой системы регулирования скорости на спуске координируют с функцией для системы автоматического поддержания скорости с управлением опорной скоростью, чтобы максимизировать упомянутую величину упомянутой повышенной опорной скорости vref_dhsc_schwung.
16. Способ по п. 15, в котором управление упомянутой опорной скоростью vref_dhsc для упомянутой системы регулирования скорости на спуске учитывает снижение упомянутой опорной скорости vref_cc для упомянутой системы автоматического поддержания скорости с управлением опорной скоростью до упомянутого уклона спуска.
17. Способ по любому из пп. 1-4, 6, 12, 13 или 16, в котором упомянутая опорная скорость vref_dhsc для упомянутой системы регулирования скорости на спуске временно снижается до начального уровня vref_dhsc_initial для упомянутой опорной скорости, если упомянутый смоделированный профиль vsim будущей скорости указывает, что действительная скорость vact транспортного средства будет превышать сверхнормативную скорость vs1 в течение по меньшей мере предопределенного периода Ts1 нарушения в связи с упомянутым уклоном спуска.
18. Способ по любому из пп. 1-4, 6, 12, 13 или 16, в котором упомянутая опорная скорость vref_dhsc для упомянутого регулирования скорости на спуске временно снижается до начального уровня vref_dhsc_initial для упомянутой опорной скорости, если упомянутый смоделированный профиль vsim будущей скорости по меньшей мере частично больше или равен упомянутой повышенной опорной скорости vref_dhsc_schwung.
19. Способ по любому из пп. 1-4, 6, 12, 13 или 16, в котором упомянутая повышенная опорная скорость vref_dhsc_schwung имеет уровень, который вместе с избыточной скоростью vschwung превышает начальный уровень vref_dhsc_initial упомянутой опорной скорости на первом участке упомянутого уклона спуска.
20. Способ по п. 18, в котором упомянутая повышенная опорная скорость vref_dhsc_schwung приводит к повышенной действительной скорости транспортного средства на конечном участке упомянутого уклона спуска по сравнению с действительной скоростью vact транспортного средства, которая привела к упомянутой начальной опорной скорости vref_dhsc_initial для упомянутой системы регулирования скорости на спуске, причем упомянутая повышенная действительная скорость транспортного средства означает, что упомянутое транспортное средство выходит из упомянутого уклона спуска с повышенной кинетической энергией Wk.
21. Способ по любому из пп. 1-4, 6, 12, 13 или 16, в котором упомянутой опорной скорости vref_dhsc разрешается сохранять свое повышенное значение vref_dhsc_schwung, пока действительная скорость vact транспортного средства не станет меньшей, чем заданная скорость vset_dhsc для упомянутой системы регулирования скорости на спуске.
22. Способ по любому из пп. 1-4, 6, 12, 13 или 16, в котором упомянутая повышенная опорная скорость vref_dhsc_schwung для упомянутой системы регулирования скорости на спуске приводит по меньшей мере к одному действию в группе:
- величина тормозного усилия, действующего в упомянутом транспортном средстве, снижается,
- переключение передач на более высокую передачу выполняется в упомянутом транспортном средстве,
- переключение передач на нейтральную передачу выполняется в упомянутом транспортном средстве и
- выполняется переход к торможению двигателем упомянутого транспортного средства.
23. Способ по любому из пп. 1-4, 6, 12, 13 или 16, в котором упомянутое моделирование упомянутого по меньшей мере одного профиля vsim будущей скорости основывается на игнорировании воздействия упомянутой системы регулирования скорости на спуске.
24. Система для управления опорной скоростью vref_dhsc для системы регулирования скорости на спуске в транспортном средстве в связи с уклоном спуска, причем упомянутая система выполнена с возможностью обеспечивать повышенную опорную скорость vref_dhsc_schwung в конечной части упомянутого уклона, отличающаяся
- блоком моделирования, выполненным с возможностью моделировать по меньшей мере один профиль vsim будущей скорости для действительной скорости для упомянутого транспортного средства на участке дороги впереди упомянутого транспортного средства, причем упомянутое моделирование основывается на топографической информации,
- установлением, выполненным с возможностью устанавливать, будет ли упомянутой опорной скорости vref_dhsc назначаться упомянутая повышенная опорная скорость vref_dhsc_schwung, причем упомянутое установление основывается на сравнении упомянутого смоделированного профиля vsim будущей скорости с допустимой величиной для упомянутой повышенной опорной скорости vref_dhsc_schwung и/или со сверхнормативной скоростью vs1, и
- блоком назначения, выполненным с возможностью назначать упомянутую повышенную опорную скорость vref_dhsc_schwung упомянутой опорной скорости vref_dhsc, если это было установлено.
| WO 2011021084 A2, 24.02.2011 | |||
| WO 2010144028 A1, 16.12.2010 | |||
| УСТРОЙСТВО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2008 |
|
RU2392145C1 |

