ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к двунаправленному миниатюризированному исполнительному механизму.
УРОВЕНЬ ТЕХНИКИ ИЗОРЕТЕНИЯ
Существуют многие применения, которые могут получить пользу от исполнительного механизма уменьшенного размера, но который может индуцировать значительное перемещение или прикладывать значительную силу.
Двигатели наиболее часто используются в качестве исполнительных механизмов для генерирования больших перемещений и сил. Для многих миниатюризированных применений, даже малые двигатели являются слишком большими, тяжелыми, шумными и дорогостоящими. Кроме того, миниатюрные двигатели имеют меньшую эффективность.
Материалы с памятью формы (shaped memory material - SMM), особенно сплавы с памятью формы (shape memory alloy - SMA), способны обеспечить значительную силу и перемещение при нагревании выше их конкретной температуры фазового перехода. Даже если размеры материала являются малыми, обеспечиваемые сила и перемещение являются, относительно этих размеров, очень большими и точными, в течение очень длительного периода времени и после многих операций переключения.
Поэтому было исследовано использование материалов с памятью формы для обеспечения сигнала срабатывания, зависящего от температуры. Например, US2014/0007572 раскрывает использование проволоки из сплава с памятью формы, которая сжимается при увеличении температуры выше температуры фазового перехода материала, в результате чего обеспечивается включение исполнительного механизма. После уменьшения температуры и перехода проволоки обратно в низкотемпературную фазу, обеспечивается восстановление исходной длины проволоки, и, следовательно, сброс исполнительного механизма, посредством использования дополнительных смещающих пружин, которые растягивают проволоку обратно до ее низкотемпературной длины.
Требование обеспечения внешнего механического смещения для сброса формы исполнительного механизма является недостатком, который следует из того факта, что, когда происходит уменьшение температуры, фаза изменяется обратно на исходную фазу, но форма не изменяется. Таким образом, перед тем, как исполнительный механизм сможет быть использован снова, после уменьшения температуры, должен быть включен внешний привод для реверсирования изменения формы SMM.
Внешнее механическое смещение привносит в исполнительное устройство значительный объем, затраты и сложность в изготовлении, что часто сводит на нет главные преимущества, которые может обеспечить применение SMM. Кроме того, использование постоянных механических смещающих пружин уменьшает эффективное перемещение исполнительного механизма.
Таким образом, необходимо миниатюризированное исполнительное устройство, использующее SMA-материалы, для обеспечения значительной силы срабатывания, имеющее способность двунаправленной работы, но без необходимости обеспечения объемных или сложных смещающих в обратном направлении механизмов для сброса исполнительного механизма между перемещениями.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение определено формулой изобретения.
Согласно одному аспекту настоящего изобретения, обеспечен двунаправленный исполнительный механизм, содержащий:
теплочувствительный слой с памятью формы, причем слой с памятью формы содержит сплав с памятью формы, причем сплав существует в первой фазе ниже первой температуры и во второй фазе выше второй температуры, и, причем, переход из первой во вторую фазу стимулирует переход слоя из любой первой формы во вторую, заданную форму;
слой электроактивного полимера, соединенный со слоем сплава с памятью формы таким образом, чтобы они оба имели одну и ту же форму, причем слой электроактивного полимера является деформируемым, в ответ на приложенное электрическое напряжение; и
нагревательное средство для управления температурой теплочувствительного слоя с памятью формы.
Электроактивные полимеры (electro-active polymer - EAP) содержат группу материалов, которые претерпевают управляемую деформацию в ответ на приложенное электрическое поле. Механическое напряжение, генерируемое EAP, претерпевающим деформацию, является значительно меньшим, чем механическое напряжение, генерируемое сплавом с памятью формы (SMA), претерпевающим деформацию, и, следовательно, само по себе имеет ограниченную полезность в приводных применениях. Однако, механическое напряжение, генерируемое EAP, является достаточным для преодоления сил сопротивления SMA, когда упомянутый SMA находится в его низкотемпературной фазе, и, следовательно, является достаточным для деформирования формы такого слоя во время такой фазы.
Варианты осуществления настоящего изобретения, таким образом, используют свойства изменения формы EAP для обеспечения функции «обратного срабатывания» в контексте основанного на SMA исполнительного механизма. SMA-слой может быть нагрет с использованием нагревательного средства, и, таким образом, возбужден для перехода из исходной формы в его высокотемпературную форму с памятью формы, что обеспечивает силу срабатывания при осуществлении этого перехода. После охлаждения ниже его температуры фазового перехода, SMA становится сверхэластичным, и им можно управлять с использованием меньшей прикладываемой силы, чем во время его высокотемпературной фазы. Электрическое поле может быть затем приложено к присоединенному EAP-слою, что вызывает деформирование упомянутого слоя в ответ, причем эта деформация тянет с собой SMA-слой, и, следовательно, обеспечивает «сброс» исполнительного механизма обратно в его начальную, исходную форму.
EAP-слой, следовательно, обеспечивает двунаправленность исполнительного механизма, без привнесения какого-либо значительно возросшего объема - поскольку лишь очень тонкая фольга EAP, в контексте миниатюризированного исполнительного механизма, является достаточной для деформирования SMA-слоя, когда он находится в низкотемпературной фазе.
Хотя сила, генерируемая EAP во время деформирования, является меньшей, чем сила SMA, любая генерируемая избыточная сила, которая превышает или является большей, чем сила, которая требуется для смещения SMA во время «обратного перемещения», может быть, тем не менее, использована для выполнения некоторой (менее интенсивной) функции обратного срабатывания. Кроме того, электроактивные полимеры обладают свойством, состоящим в том, что размер их деформации может управляемо изменяться посредством изменения величины электрического поля, приложенного к ним. Большее поле вызовет большую деформацию, чем меньше будет поле, тем меньше будет деформация. Это является отличием от SMA, которые обычно переключаются из одного конечного состояния в другое конечное состояние, причем не существует никаких средств управления размером деформации. Следовательно, EAP-слой в некоторых вариантах осуществления может быть использован для обеспечения дополнительной функциональности: низкоинтенсивное, но точно управляемое срабатывание в противоположном направлении по отношению к деформации SMA.
В одной группе вариантов осуществления, нагревательное средство содержит по меньшей мере два контактных вывода, электрически соединенных со сплавом с памятью формы, для обеспечения электрического тока через сплав.
Посредством приложения разности потенциалов между двумя контактными выводами, слой сплава подвергается нагреванию джоулевым теплом. Контактные выводы, например, могут быть обеспечены на двух противоположных концах компонента из сплава, что обеспечивает нагревание по всей протяженности материала.
В то время как нагревание джоулевым теплом представляет собой прямое и эффективное средство увеличения температуры сплава, в некоторых вариантах осуществления может быть невыгодным или проблематичным возбуждение тока в самом сплаве - например, когда такой ток может мешать соседним компонентам в конкретном применении. Следовательно, согласно другой группе вариантов осуществления, нагревательное средство содержит нагревательный элемент, находящийся в тепловом соединении со слоем с памятью формы. Нагревательный элемент может, в некоторых случаях, содержать элемент, физически прикрепленный к сплаву, или, альтернативно, может содержать элемент, выполненный с возможностью нагревания среды, окружающей сплав, или окружающей всю двуслойную структуру.
Теплочувствительный слой с памятью формы может в некоторых вариантах осуществления содержать слой полимерного материала, имеющего встроенную проволоку из сплава с памятью формы. В этом случае, слой полимера может действовать в качестве электрической и тепловой изоляции между SMA-проволокой и EAP-материалом. В альтернативных вариантах осуществления слой с памятью формы может просто содержать тонкий лист или фольгу из сплава с памятью формы, не имеющие никакого окружающего полимерного компонента.
Дополнительно обеспечен, согласно одному аспекту настоящего изобретения, лучеформирующий элемент, содержащий:
канал, имеющий одну или несколько граничных стенок, причем по меньшей мере одна граничная стенка содержит один или несколько исполнительных механизмов по любому предшествующему пункту формулы изобретения.
Посредством управляемого стимулирования исполнительных механизмов, содержащихся в граничных стенках, форма и/или относительная ориентация по направлению канала может быть динамически настроена. Например, лучеформирующий элемент может обеспечить динамическое управление лучом в осветительном применении, в котором противоположно расположенные исполнительные механизмы стимулируются для параллельного изгиба в одном и том же заданном направлении, в результате чего открытый конец канала «разворачивается» с одной ориентации по направлению на другую ориентацию по направлению. Альтернативно, противоположно расположенные исполнительные механизмы могут быть простимулированы для деформирования «внутрь», по направлению друг к другу, в результате чего канал «сжимается», и изменяется диаметр по меньшей мере одного открытого конца канала.
Дополнительно, лучеформирующий элемент может дополнительно содержать один или несколько оптических элементов, расположенных на одном конце канала. Это могут быть единичные элементы или матрицы элементов. По меньшей мере подмножество элементов может быть установлено на конце канала таким образом, чтобы элементы перемещались вместе с каналом, когда он стимулируется для «разворачивания» по методике, описанной выше.
Дополнительно обеспечено, согласно одному аспекту настоящего изобретения, адаптивное осветительное устройство, содержащее:
один или несколько лучеформирующих элементов, описанных выше; и
один или несколько твердотельных осветительных элементов, расположенных в пределах граничных стенок канала.
Твердотельные осветительные элементы могут быть расположены на подложечном слое или PCB в основании лучеформирующего элемента, таким образом, чтобы свет, генерируемый этими элементами, мог обеспечить необходимое выходное распределение или направление/форму луча.
Согласно дополнительному аспекту настоящего изобретения, также обеспечена контактирующая с кожей структура для бреющего волосы кожи устройства, причем контактирующая с кожей структура предназначена для контактирования с контактным участком кожи во время бритья упомянутой кожи бреющим устройством, причем эта структура содержит исполнительный механизм по любому из пунктов 1-4 формулы изобретения для изменения относительного положения или ориентации между по меньшей мере частью контактирующей с кожей структуры и участком кожи.
Управляемая деформация EAP-слоя может быть, например, использована в таком варианте осуществления для обеспечения точных настроек положения бреющего кожу устройства в реальном времени согласно перемещению пользователем бреющего устройства по коже. Относительное положение контактирующей с кожей структуры и кожи может быть настроено для поддержания постоянного контакта с кожей для максимальной эффективности срезания в данной области кожи.
Согласно другому аспекту настоящего изобретения, обеспечен способ двунаправленного срабатывания, содержащий:
использование нагревательного средства для увеличения температуры первого образующего слой элемента, причем этот элемент содержит сплав с памятью формы, и увеличение температуры стимулирует переход сплава из первой формы при первой температуре во вторую, заданную форму при второй температуре;
уменьшение температуры первого образующего слой элемента до третьей температуры; и
приложение электрического напряжения ко второму образующему слой элементу, причем второй образующий слой элемент соединен с первым образующим слой элементом таким образом, что они оба имеют одну и ту же форму, и содержит электроактивный полимер, причем электрическое напряжение стимулирует полимер деформироваться из второй, заданной формы, в третью форму, причем третья форма зависит от величины электрического напряжения.
Первая форма может, в общем, содержать любую произвольную форму, в которую SMA-слой был внешним образом деформирован, пока он находился в своей низкотемпературной фазе (с низким механическим напряжением). Первая температура может быть, в общем, любой температурой ниже конкретной температуры перехода «от низкотемпературной фазы к высокотемпературной фазе» - конкретное значение которой зависит от конкретного материала сплава. Сплав нагревают с использованием нагревательного средства для доведения его до температуры выше этой температуры перехода, причем в этот момент его стимулируют для изменения его исходной формы до второй, заданной формы с памятью формы. Вторая температура является, в общем, любой температурой выше температуры перехода «от низкотемпературной фазы к высокотемпературной фазе».
После деформации до его формы с памятью формы, температуру слоя затем уменьшают до третьей температуры, причем эта третья температура является любой температурой, которая является меньшей, чем конкретная температура перехода «от высокотемпературной фазы к низкотемпературной фазе», относящаяся к материалу. При этой третьей температуре, слой снова находится в своей низкотемпературной (тягучей) фазе. Уменьшение температуры может в некоторых вариантах осуществления содержать «пассивное» уменьшение температуры; нагревательное средство может быть выключено, и слою позволяют охлаждаться посредством передачи тепла в окружающую среду. Альтернативно, температура слоя может быть уменьшена активно, посредством применения некоторого внешнего охлаждающего элемента или устройства.
После охлаждения SMA-слоя до его низкотемпературной фазы, EAP-слой может быть электрически простимулирован для деформирования в противоположном «направлении» по отношению к деформации SMA-слоя, в результате чего исполнительный механизм доводится до третьей формы. В некоторых вариантах осуществления ко второму образующему слой элементу прикладывается электрическое напряжение, имеющее такую величину, чтобы третья форма была идентичной первой форме. Таким образом, деформация EAP-слоя возвращает или «сбрасывает» исполнительный механизм в исходную, начальную, первую форму.
После отключения подаваемого тока, внутренняя сила сопротивления SMA-слоя - находящегося все еще в его низкотемпературной фазе - является достаточной для удерживания исполнительного механизма от возвращения в естественную форму при низком электрическом напряжении EAP, и, следовательно, исполнительный механизм сохраняет свою форму и не деформируется. Хотя при электрической активации EAP генерирует достаточное механическое напряжение для преодоления сил сопротивления SMA-слоя, который находится в низкотемпературной фазе, когда EAP является неактивным, внутреннее механическое напряжение SMA превышает внутреннее механическое напряжение EAP, что позволяет SMA удерживать форму исполнительного механизма.
В некоторых вариантах осуществления вышеупомянутого способа, переход формы первого образующего слой элемента используется для обеспечения силы срабатывания, в то время как в других вариантах осуществления переход формы второго образующего слой элемента может быть использован для обеспечения силы срабатывания. В других вариантах осуществления, оба перехода формы могут быть использованы для обеспечения силы срабатывания.
Как описано выше, переход формы первого образующего слой элемента способен выполнить большую работу во время его деформации, чем переход формы второго образующего слой элемента, но переход второго слоя является управляемым в отношении его размера и его скорости изменения. В разных применениях, разные варианты осуществления могут быть наиболее полезными.
Нагревательное средство в описанном выше способе срабатывания может содержать процесс нагревания джоулевым теплом, в котором ток проходит по меньшей мере через участок первого образующего слой элемента.
В некоторых вариантах осуществления электрическое напряжение может быть приложено ко второму образующему слой элементу через первый образующий слой элемент, причем первый образующий слой элемент имеет электрическое соединение со вторым образующим слой элементом. Первый образующий слой элемент действует в этом случае как анод и/или катод для второго образующего слой элемента. Это позволяет избежать необходимости в обеспечении специальных контактных выводов для EAP-слоя для приложения электрического напряжения. Поскольку при выполнении способа срабатывания никогда не бывает так, чтобы первый слой должен был нагреваться, и, одновременно, чтобы второй слой должен был электрически стимулироваться, использование первого слоя как анода/катода для второго слоя не должно мешать никакому процессу нагревания джоулевым теплом упомянутого первого слоя.
Согласно другому аспекту настоящего изобретения, обеспечен способ изготовления двунаправленного исполнительного механизма, содержащий:
соединение первого образующего слой элемента, содержащего сплав с памятью формы, со вторым образующим слой элементом, содержащим электроактивный полимер, таким образом, чтобы эти два элемента имели одну и ту же форму; и
обеспечение нагревательного средства таким образом, чтобы нагревательное средство находилось в тепловом соединении с первым образующим слой элементом.
Соединение может содержать, в некоторых вариантах осуществления, процесс нанесения слоев, например. В других вариантах осуществления соединение может быть обеспечено посредством нанесения «покрытия» из слоя полимера на слой сплава, например.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры настоящего изобретения будут теперь описаны подробно со ссылкой на сопутствующие чертежи, в которых:
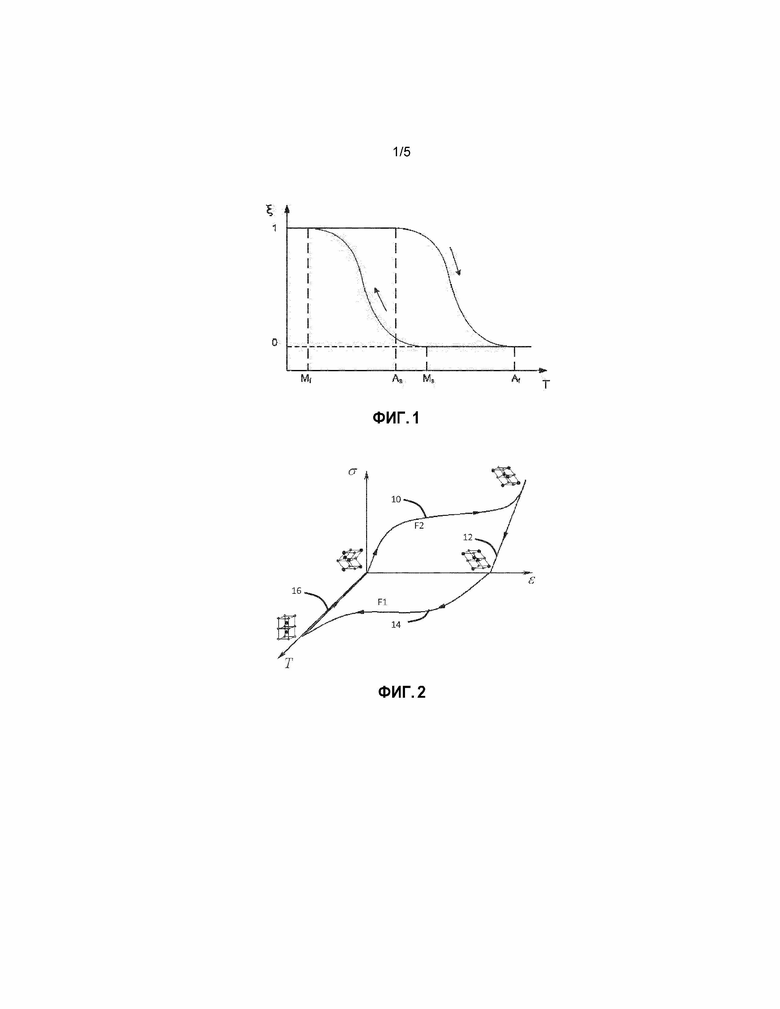
Фиг.1 показывает зависимость температура - фаза для сплава с памятью формы;
Фиг.2 показывает зависимость температура - механическое напряжение - деформация для материала с памятью формы;
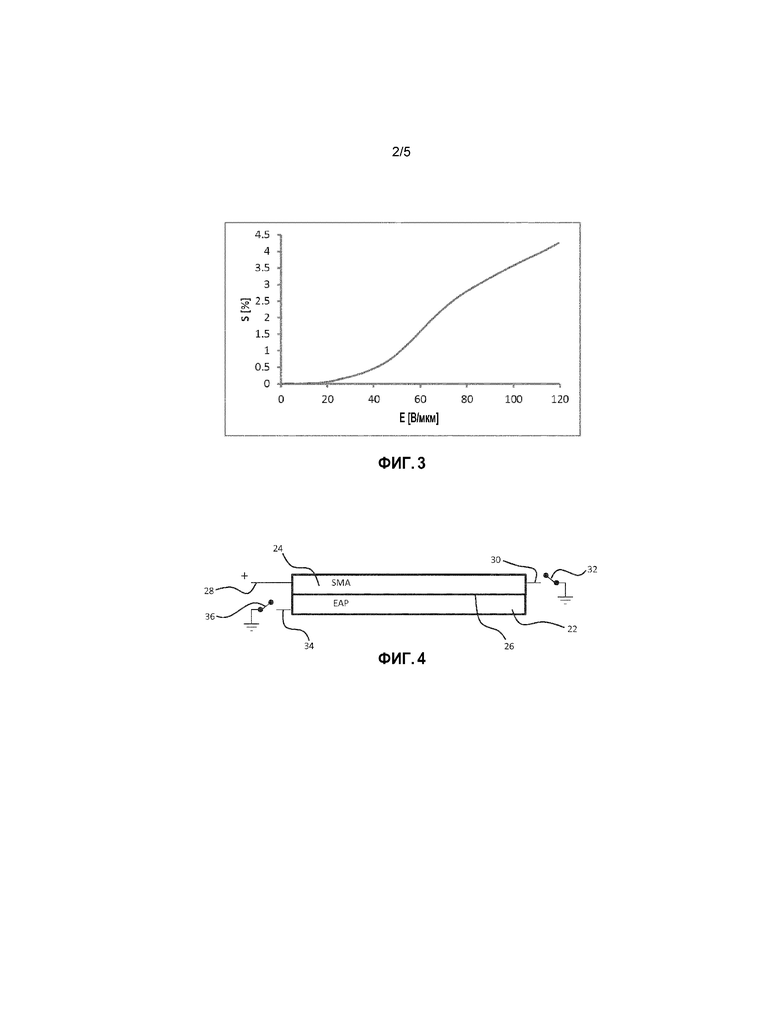
Фиг.3 показывает кривую зависимости деформация - электрическое напряжение для типичного EAP, подходящего для использования в настоящем изобретении;
Фиг.4 показывает первый иллюстративный вариант осуществления исполнительного механизма;
Фиг.5 показывает первый иллюстративный способ срабатывания, согласно первому варианту осуществления исполнительного механизма;
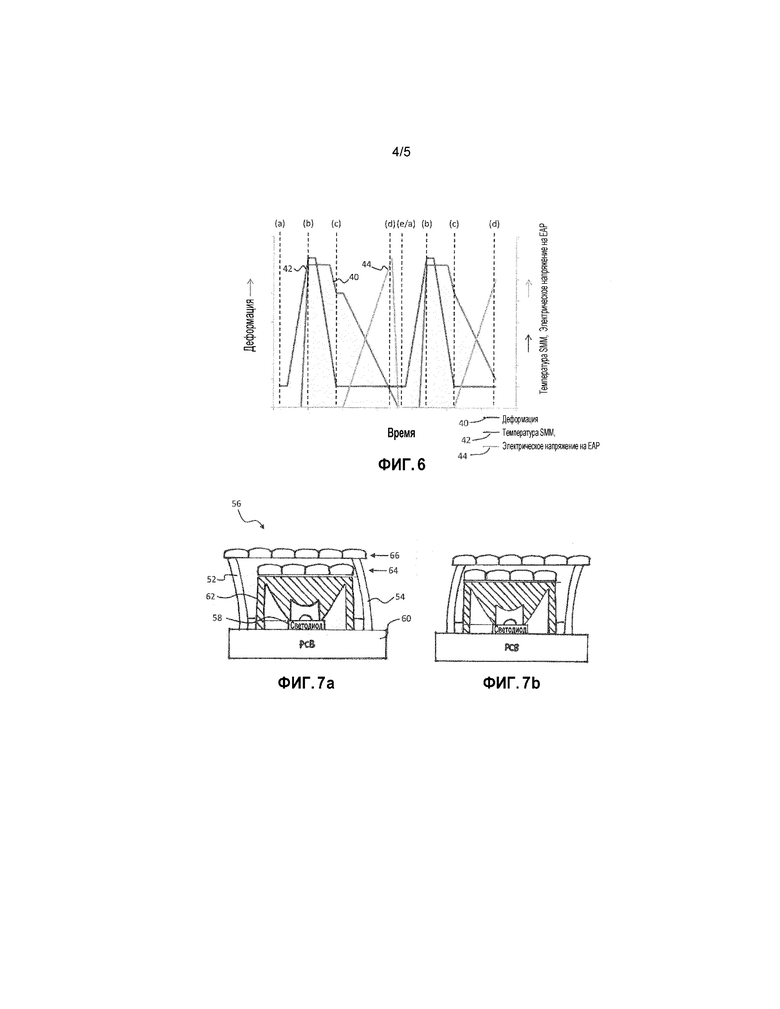
Фиг.6 показывает графическое представление первого способа срабатывания, в отношении изменений в деформации исполнительного механизма, SMA-температуры и EAP-электрического напряжения, в зависимости от времени;
Фиг.7a-b показывают иллюстративный лучеформирующий элемент, включающий в себя один или несколько вариантов осуществления исполнительного механизма;
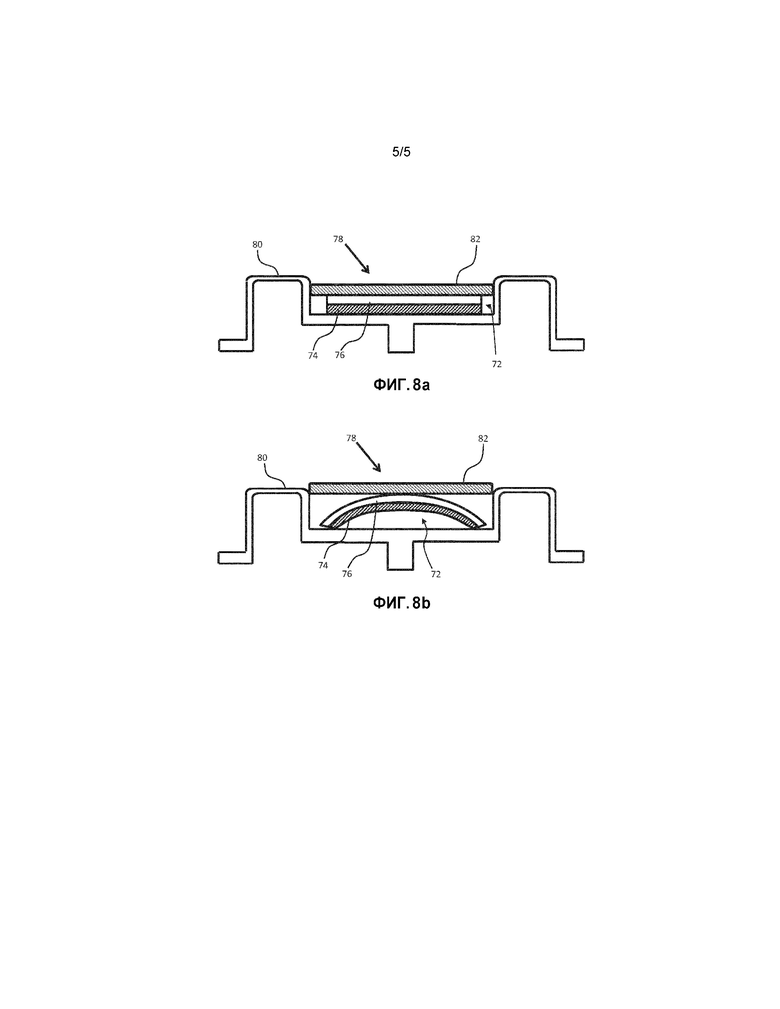
Фиг.8a-b показывают контактирующий с кожей элемент бреющего устройства, включающий в себя один вариант осуществления исполнительного механизма.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Настоящее изобретение обеспечивает термически и электрически управляемый миниатюризированный исполнительный механизм, содержащий двуслойную структуру, образованную из слоя сплава с памятью формы, соединенного со слоем электроактивного полимера. Нагревательное средство обеспечено для тепловой стимуляции слоя сплава с памятью формы, причем этот слой переходит из исходной формы при первой температуре во вторую, заданную форму при второй температуре. Приложение электрического поля к слою электроактивного полимера стимулирует этот слой деформироваться в ответ, с механическим напряжением, которое может превышать механическое напряжение слоя сплава, когда последний слой находится в низкотемпературной фазе. Дополнительно обеспечены способы срабатывания, которые включают в себя стимулирование слоя полимера деформироваться в противоположном «направлении» по отношению к деформации слоя сплава, что позволяет исполнительному механизму быть «сброшенным» между перемещениями. Также обеспечены способы изготовления исполнительного механизма.
Материалы с памятью формы (SMM) являются хорошо известными, в частности, хорошо известны сплавы с памятью формы (SMA). Двумя основными типами сплавов с памятью формы являются медь-алюминий-никель и никель-титан (NiTi), который известен как нитинол. Нитинол является, например, доступным в виде проволоки, прутка и полосы, или в виде тонкой пленки. Однако SMA могут быть также созданы посредством сплавления цинка, меди, золота и железа.
SMA могут существовать в двух разных фазах, с тремя разными кристаллическими структурами (т.е. двойникованный мартенсит, раздвойникованный мартенсит и аустенит). Нитиноловые сплавы переходят из мартенситного состояния в аустенитное состояние при нагревании, и возвращаются в исходное состояние при охлаждении.
Фиг.1 показывает долю мартенсита как функцию нагревания, во время нагревания и охлаждения. Во время нагревания As и Af являются температурами, при которых начинается и заканчивается преобразование из мартенсита в аустенит. Температура As является температурой перехода. Во время охлаждения, Ms и Mf являются температурами при которых начинается и заканчивается переход к мартенситу.
Различие между переходом нагревания и переходом охлаждения обусловливает гистерезис, причем некоторая часть механической энергии теряется в этом процессе. Форма кривой зависит от свойств материала сплава с памятью формы, например, от легирования и деформационного упрочнения.
Переход от мартенситной фазы к аустенитной фазе зависит только от температуры и механического напряжения, и не зависит от времени. Когда сплав с памятью формы находится в своем холодном состоянии (ниже As), металл может быть изогнут или растянут и будет удерживать эти формы до тех пор, пока не будет нагрет выше температуры перехода. После нагревания, форма изменяется по отношению к его исходной форме. Когда металл охладится снова, он изменит фазу, но не форму, и, таким образом, останется в горячей форме, пока не будет деформирован снова.
При использовании этого одностороннего эффекта, охлаждение с высоких температур не вызывает макроскопического изменения формы. Деформация необходима для воссоздания низкотемпературной формы. Температура перехода As для нитинола определяется типом и составом сплава и может изменяться между -150°C и 200°C. В общем, используется температура перехода в диапазоне от -20°C до 120°C. Таким образом, температура перехода может быть настроена для конкретного применения.
Также существуют материалы с двусторонним эффектом памяти формы, на основе холодной деформации или упрочнения, с высокими механическими напряжениями в мартенситной фазе. Однако, этот эффект не позволяет повторять температурные циклы, поскольку механические напряжения сбрасываются с течением времени. Настоящее изобретение относится, конкретно, к материалам с односторонней памятью формы.
Как упомянуто выше, фазовые переходы зависят от механического напряжения, а также от температуры. Фиг.2 является схемой, показывающей функцию механическое напряжение - деформация - температура для эффекта памяти формы. Механическое напряжение показано в виде σ, а деформация показана в виде ε.
Материал отжигают для запоминания конкретной формы. Материал деформируют до его низкотемпературной формы вдоль пути 10 посредством приложения механического напряжения к материалу. Это является областью раздвойникования. Существует резкое увеличение наклона на кривой механическое напряжение - деформация, после которого материал становится гораздо труднее деформировать дальше. После снятия механического напряжения, показанного в виде пути 12, большая деформация все же останется в материале до тех пор, пока не будет осуществлено нагревание выше температуры перехода. Этим нагреванием является путь 14 нагревания для перевода материала в аустенитную фазу. Затем, он может быть охлажден обратно до фазы двойникованного мартенсита вдоль пути 16, причем в этой точке деформация в материале была уменьшена (но форма обратно не изменилась).
Модуль упругости (E-modulus) высокотемпературной фазы SMA является значительно более высоким, чем модуль упругости низкотемпературной фазы.
Изменение формы, которое сопровождает это изменение фазы во время нагревания, может обеспечить первую силу F1. После уменьшения температуры ниже температуры изменения фазы, и, таким образом, после изменения фазы до низкотемпературной фазы, меньшая сила F2 необходима для переформирования SMA в его исходную форму (путь 10 на фиг.2).
Электроактивные полимеры являются группой полимеров, которые демонстрируют изменение в размере или форме при стимулировании электрическим полем. Конкретно, электроактивные полимеры включают в себя электрострикционные полимеры и ионные полимеры, которые способны генерировать управляемую деформацию, когда к ним приложено электрическое напряжение. Размером деформации можно управлять посредством изменения прикладываемого электрического напряжения, что обеспечивает возможность цифрового контроля перемещения. В отличие от сплавов с памятью формы, у которых высокотемпературная форма сохраняется даже после повторного входа в низкотемпературную фазу, электроактивный полимер возвращается обратно в свою исходную форму, как только устраняется электрический стимул.
Фиг.3 показывает иллюстративную кривую деформация - электрическое напряжение для типичного электроактивного полимера, причем деформация соответствует общей вносимой деформации как доли в общей длине материала, и Е соответствует напряженности электрического поля, приложенного к материалу. В отличие от зависимости деформация-температура для SMA (показанной на фиг.2), существует, для электроактивных полимеров, взаимно-однозначная зависимость между этими двумя параметрами, так что нулевое электрическое напряжение всегда возвращает материал в единственную конкретную форму с нулевой деформацией (недеформированную форму).
Конкретный EAP, которому соответствует кривая фиг.3, является управляемым полем релаксорным ферроэлектрическим EAP. Показанная зависимость деформации от приложенного электрического поля является типичной для основанных на PVDF терполимерных систем, таких как PVDF-TrFE-CFE. Материал PVDF-TrFE-CFE обычно имеет относительно высокий модуль упругости по сравнению с другими EAP, такими как ионные полимеры и диэлектрические эластомеры, и поэтому обычно подходит для деформирования SMA.
Настоящее изобретение основано на объединении свойств изменения формы сплавов с памятью формы со свойствами изменения формы электроактивных полимеров для обеспечения исполнительного устройства, способного обеспечить большую силу срабатывания по меньшей мере в одном направлении, но которое также демонстрирует двунаправленную функциональность, таким образом, что исполнительный механизм может быть обратно деформирован без необходимости применения объемных внешних механических смещающих средств. Слой сплава с памятью формы соединен со слоем электроактивного полимера для образования исполнительного устройства. Сплав с памятью формы деформируется со значительной избыточной силой при переходе между низкотемпературной и высокотемпературной фазами, причем избыточная сила может быть легко использована в событии срабатывания. Электроактивный полимер обеспечивает возможность «ручной» деформации SMA обратно из его высокотемпературной формы, посредством приложения электрического поля, и, кроме того, обеспечивает возможность управления скоростью и размером этой деформации.
На фиг.4 показан простой первый пример исполнительного механизма согласно настоящему изобретению. Слой электроактивного полимера (EAP) 22 и слой сплава 24 с памятью формы (SMA) соединены на планарной границе 26, так что эти два слоя имеют одну и ту же форму. SMA-слой снабжен нагревательным средством, содержащим анод 28 и катод 30, обеспечивающими протекание тока через слой, для обеспечения нагревания материала джоулевым теплом. Таким образом, нагревательное средство включает в себя электроды для протекания тока для нагревания джоулевым теплом. Нагревательное средство может дополнительно содержать переключающий компонент 32 для управления нагреванием слоя при приложении положительного электрического напряжения к аноду 28. Однако, в альтернативных вариантах осуществления, вместо этого может быть использован внешний модуль управления для управляемого приложения электрических напряжений к различным анодам и катодам, и, следовательно, переключающие компоненты не требуются.
Следует дополнительно отметить, что, хотя в конкретном примере фиг.4 исполнительный механизм включает в себя слой 24 с памятью формы, состоящий полностью из материала сплава с памятью формы, в альтернативных примерах, слой с памятью формы может содержать слой, состоящий частично или главным образом из полимерного (или некоторого другого непроводящего) материала, но имеющий встроенный элемент с памятью формы, такой как проволока с памятью формы. В этом случае, анод 28 и катод 30 обеспечиваются прямо на упомянутом элементе, или проволоке, а не на окружающей образующий слой структуре. В этом случае, полимерный материал может действовать для обеспечения электрической и тепловой изоляции между SMA-элементом и EAP-материалом. Это может быть полезным, например, когда необходимо, чтобы температура EAP-слоя оставалась по существу постоянной или стабильной как во время высокотемпературной фазы, так и во время низкотемпературной фазы SMA-материала.
EAP-слой 26 снабжен вторым катодом 34, соединенным через второй переключающий элемент 36 с потенциалом земли. При приложении ненулевого электрического напряжения к аноду 28, и когда первый катодный переключающий компонент 32 открыт, материал сплава по всему SMA-слою приобретает электрический потенциал, приложенный к аноду, и, следовательно, эффективно продолжает площадь поверхности анода для покрытия всей верхней поверхности EAP-слоя. В комбинации со вторым катодом 34, SMA-слой, таким образом, стимулирует электрическое поле поперек EAP-слоя. Поскольку сам EAP-материал является неметаллическим, никакой ток не генерируется в этом процессе ни в одном из слоев - и, таким образом, предотвращается непреднамеренное нагревание SMA джоулевым теплом.
В то время как в примере фиг.4 сам SMA-слой используется в качестве электрода для EAP-слоя, в других вариантах осуществления, EAP-слой может быть вместо этого снабжен специальной парой анод-катод, так, чтобы электрическая стимуляция могла быть индуцирована в материале независимо от вышеупомянутого SMA-слоя. Такой вариант осуществления может быть предпочтительным, например, когда электрическое и/или тепловое соединение между этими двумя слоями является нежелательным или невыгодным. В этих случаях, может быть дополнительно обеспечена изоляция между этими двумя слоями - например, в виде дополнительного промежуточного слоя, причем в этом случае независимая электрическая стимуляция EAP-слоя может быть предпочтительной.
Таким образом, во всех случаях, существует электродная система, связанная с EAP-слоем, которая может содержать специальную пару электродов или же может совместно использовать электрод с системой нагревательных электродов, когда она реализована в виде системы нагревания джоулевым теплом.
Кроме того, хотя пример фиг.4 включает в себя нагревательное средство, содержащее анод 28 и катод 30 (для обеспечения нагревания джоулевым теплом), в других вариантах осуществления, нагревательное средство может вместо этого содержать внешний нагревательный компонент, либо физически прикрепленный к SMA-слою, либо, иначе, расположенный таким образом, чтобы нагревать среду, окружающую SMA-слой. В то время как нагревание джоулевым теплом представляет собой прямое и эффективное средство увеличения температуры сплава, в некоторых вариантах осуществления, может быть невыгодно или проблематично индуцировать ток в самом сплаве - например, когда такой ток может мешать соседним компонентам в конкретном применении. В этих случаях, специальный нагревательный элемент, находящийся в тепловом соединении (по меньшей мере) с SMA-слоем, может быть более предпочтительным, чем анод и катод, предназначенные для направления тока через слой.
Посредством контроля прикладываемых электрических напряжений на трех контактных выводах 28, 30, 34, двуслойная структура фиг.4 может быть простимулирована для обеспечения срабатывания как в прямом, так и в обратном направлении. На фиг.5 показаны этапы (a)-(e) в первом иллюстративном цикле срабатывания согласно вариантам осуществления настоящего изобретения. На (начальном) этапе (а), исполнительный механизм находится в «плоской» или «неактивированной» форме. Как первый 30, так и второй 34 катоды отключены, и никакие электрические поля и токи не действуют. SMA-слой на этом этапе цикла находится в своей низкотемпературной, мартенситной фазе - т.е. при температуре по меньшей мере ниже As (см. фиг.1).
Первое срабатывание исполнительного механизма стимулируется на этапе (b), посредством подключения первого катода 28, в результате чего индуцируется нагревание джоулевым теплом SMA-слоя. В ответ, SMA-слой увеличивает температуру от первой температуры, ниже As, до второй температуры, выше Af. Когда температура увеличивается от As до Af, фаза SMA-материала переходит с мартенситной на аустенитную, в результате материал стимулируется к переходу в его высокотемпературную запоминаемую форму. Как описано выше, это изменение формы представляет собой снятие механического напряжения, созданного в материале посредством процесса деформирования его из его запоминаемой формы, и это избыточное механическое напряжение может быть использовано для обеспечения силы F1 срабатывания.
Фиг.5(b) показывает исполнительный механизм после приобретения SMA температуры T>Af, и после того, как произошел сопутствующий переход формы. В этот момент, ток через слой отключают, и SMA-слою дают возможность снова охладиться, до температуры ниже Mf. Когда температура уменьшается от Ms до Mf, слой снова переходит в свою мартенситную фазу. Фиг.5(c) показывает исполнительный механизм после того, как это охлаждение произошло. При переходе от аустенита к мартенситу, слой сохраняет свою форму, но его модуль упругости значительно уменьшается. В моделях, SMA-слой демонстрировал модуль упругости, равный 75 ГПа, во время аустенитной фазы, и он падал до 25 ГПа во время мартенситной фазы. Это уменьшение жесткости означает, что SMA-слой может быть вручную деформирован с использованием силы F2, гораздо меньшей, чем сила F1, создаваемая самим слоем во время его перехода от этапа (а) к этапу (b).
Соответственно, на этапе (d), подключают второй катод 34, в результате чего к EAP-слою прикладывается электрическое поле. EAP деформируется в ответ на приложенное поле, причем степень деформации зависит от величины приложенного электрического напряжения (см. фиг.3). К аноду 28 прикладывают электрическое напряжение, имеющее достаточную величину для того, чтобы EAP-слой деформировался из формы (c) (запоминаемая форма SMA-слоя) в ту же самую плоскую форму, с которой исполнительный механизм начал этап (a). Модуль упругости SMA-слоя является достаточно низким, после охлаждения, для того, чтобы сила, генерируемая EAP во время его деформации, была достаточной для изгибания обоих слоев совместно, и, в результате, для переформирования всей структуры исполнительного механизма. Следовательно, электрически стимулируемая деформация EAP-слоя используется на этапе (d) для «сброса» исполнительного механизма обратно в начальную «неактивированную» конфигурацию.
При отключении катода 34, и, в результате, отключения электрического поля, механическое напряжение, генерируемое внутри EAP, падает до нуля (см. фиг.3). Однако модуль упругости холодного SMA превышает модуль упругости не-простимулированного EAP, и, следовательно, исполнительный механизм сохраняет свою плоскую форму даже после выключения поля. Фиг.5(e) показывает этот конечный этап цикла срабатывания, который возвращает исполнительный механизм в состояние, идентичное состоянию на этапе (a).
Иллюстративный цикл срабатывания фиг.5 показан графически на фиг.6, где линия 40 представляет деформацию исполнительного механизма (относительно исходной, плоской формы), линия 42 представляет температуру SMA-слоя, и линия 44 представляет электрическое напряжение, прикладываемое к EAP. Этапы (a)-(e) обозначены вдоль графика в моменты времени, в которые они происходят. Между этапом (a) и (b) температура и деформация вместе увеличиваются, когда SMA-слой переходит из мартенситной в аустенитную фазу и переформируется в свою форму с памятью формы. Между этапами (b) и (c) температура уменьшается обратно до своего уровня на этапе (а), но деформация уменьшается только очень незначительно - это уменьшение происходит вследствие того, что материал приходит в равновесие со своей низкотемпературной упругостью. Между этапами (c) и (d), электрическое напряжение на EAP непрерывно увеличивается от нуля, и деформация исполнительного механизма уменьшается (почти пропорционально) в ответ, что обеспечивает возвращение к «нулевой» деформации этапа (а), когда электрическое напряжение имеет свое наибольшее значение. Между этапами (d) и (e), электрическое напряжение на EAP выключается, но деформация остается неизменной. Поскольку SMA-слой находится в своей мартенситной фазе, электрическое напряжение на EAP равно нулю, и исполнительный механизм возвратился в свою «плоскую» форму, этап (е) является физически идентичным этапу (а), и с этого этапа цикл срабатывания может начаться снова, продолжаясь от (а)/(е) вплоть до (d).
Хотя в конкретном способе срабатывания, показанном на фиг.5 и описанным выше, SMA-слой нагревается посредством прохождения тока через материал, в альтернативных вариантах осуществления, нагревание может обеспечиваться другими средствами, например, посредством внешнего нагревательного элемента, находящегося в тепловом соединении с SMA-слоем. Тем не менее, этапы цикла срабатывания могут быть в этом случае идентичными. Кроме того, в некоторых вариантах осуществления электрическое поле может быть приложено к EAP-слою посредством отдельной, специальной пары анод-катод, находящейся в соединении с упомянутым слоем, а не через SMA-слой и анод 28.
Хотя конкретный иллюстративный способ срабатывания, показанный на фиг.5, показывает, что высокотемпературная форма SMA содержит «изогнутую» конфигурацию, смещенную относительно плоской конфигурации, в альтернативных вариантах осуществления, запоминаемая форма SMA может содержать вместо этого плоскую конфигурацию. В этом случае, EAP-слой может деформировать исполнительный механизм в изогнутую форму, и нагревание SMA может стимулировать переход в плоскую форму. Это может быть предпочтительным в применениях, где требуется «тянущее» действие срабатывания, например, а не «толкающее» действие срабатывания.
Как описано выше, переход SMA-слоя из его мартенситной фазы в его аустенитную фазу способен обеспечить значительную силу, и, следовательно, переход от этапа (а) к этапу (b) в иллюстративном цикле фиг.5 может быть обычно использован для обеспечения главной силы срабатывания в любом способе срабатывания. Однако, хотя сила, генерируемая EAP-слоем во время его деформации, является значительно меньшей, чем сила, генерируемая SMA во время его изменения формы, эта сила, тем не менее, является достаточной для выполнения функции срабатывания с низкой интенсивностью. Кроме того, как также обсуждалось выше, размером деформации EAP можно управлять посредством изменения прикладываемого электрического поля: большая напряженность поля будет генерировать больший размер деформации. Следовательно, переход от этапа (c) к этапу (d) может быть также, в некоторых вариантах осуществления, использован для выполнения дополнительной - или даже единственной - функции срабатывания. Конкретно, применения, в которых будет предпочтительно управлять скоростью срабатывания, или управлять в реальном времени, например, развитием деформации исполнительного механизма, могут получить выгоду от использования перехода EAP для передачи сил срабатывания.
В некоторых применениях, обеспечение значительной силы перемещения при срабатывании может не быть таким значимым, как характерная двунаправленная функциональность, которую исполнительный механизм может обеспечить. Одно такое иллюстративное применение показано на фиг.7а и 7b, где пара исполнительных механизмов 52, 54 согласно настоящему изобретению используется для образования части устройства 56 формирования светодиодного луча. В этом конкретном примере, светодиод 58 установлен на PCB 60 и расположен в пределах оптической камеры 62, под первой, фиксированной, линзообразной матричной структурой 64. Вокруг светодиода и первой матричной структуры находятся два исполнительных механизма 52, 54, образующих стенки светонаправляющего канала. В конце канала установлена вторая линзообразная матрица 66, располагающаяся между двумя «стенками» - исполнительными механизмами.
Как показано на фиг.7a и 7b, посредством совместной активации исполнительных механизмов, при чередовании «прямых» и «обратных» деформаций, может быть изменена ориентация канала по направлению, с «разворачиванием» выходного угла из стороны в сторону, и, в результате, с изменением направления распространения испускаемого луча. Вспомогательная оптика (линзообразные матрицы 64, 66) позволяет сфокусировать или сколлимировать испускаемый луч для обеспечения, например, остронаправленного выходного луча. Это может быть особенно предпочтительным в области автомобильного переднего освещения, например, где управление по направлению выходным лучом может быть использовано для обеспечения адаптивного/ динамически управляемого светового выхода. Кроме того, оптика может быть установлена в некотором положении и может удерживаться там в течение продолжительных периодов времени без необходимости поддержания приложения электрического напряжения к EAP (поскольку, когда SMA находится в мартенситной фазе, настройки для деформации остаются фиксированными даже после выключения электрического напряжения). Дополнительно, исполнительный механизм является достаточно устойчивым для предотвращения низкочастотных вибраций, которые могут быть видимыми и могут быть эстетически неприятными для наблюдателей.
В то время как на иллюстративном примере фиг.7a-b стенки светонаправляющего канала описаны как содержащие только пару исполнительных механизмов, в более сложных примерах, может быть использовано большее количество исполнительных механизмов, например, на «передней» и «задней» стороне канала, чем показано на фиг.7. Таким образом, канал может быть снабжен управлением по направлению в двух разных плоскостях: из стороны в сторону, и вперед-назад. Альтернативно, остальные участки стенок канала могут просто содержать гибкие мембраны, для обеспечения заключения света в оболочку, и для обеспечения возможности изгиба канала между его разными положениями.
Как описано выше, управляемая деформация исполнительного механизма во время перехода EAP-слоя делает исполнительный механизм особенно полезным в применениях, для которых необходимо чувствительное управление скоростью или размером срабатывания. Один конкретный пример такого применения показан на фиг.8a и 8b, где исполнительный механизм 72, имеющий SMA-слой 74 и EAP-слой 76, образует часть контактирующего с кожей элемента 78 бреющего устройства 80 и используется для настройки относительного расположения и/или давления между бреющим устройством и кожей пользователя. Например, исполнительный механизм может быть использован для обеспечения постоянного контакта между областью 82 контакта бреющего устройства и лицом пользователя, в результате чего увеличивается эффективность или действенность бреющего устройства. Как показано на фиг.8b, срабатывание исполнительного механизма 72 может быть использовано для подъема в «вертикальном» направлении области 82 контакта с кожей бреющего устройства, в результате чего настраивается положение области контакта относительно кожи пользователя. Затем, посредством последующего управляемого приложения электрического напряжения к EAP-слою 76, это вертикальное положение может быть точно понижено согласно положению или давлению, оказываемому на контактирующий элемент 78 бреющего устройства.
Согласно одному аспекту настоящего изобретения, дополнительно обеспечено средство изготовления двунаправленного исполнительного механизма, содержащего соединение первого образующего слой элемента, содержащего сплав с памятью формы, со вторым образующим слой элементом, содержащим электроактивный полимер - таким образом, чтобы эти два элемента имели одну и ту же форму - и, дополнительно, обеспечение нагревательного средства таким образом, чтобы нагревательное средство находилось в тепловом соединении с первым образующим слой элементом.
Соединение может содержать, в некоторых вариантах осуществления, процесс нанесения слоев, например.
Альтернативно, в других вариантах осуществления соединение может быть обеспечено посредством нанесения «покрытия» из слоя полимера на слой сплава, например. Согласно этому способу, слой сплава и слой полимера исполнительного механизма находятся в электрическом соединении, и, следовательно, вариант осуществления фиг.4 - в котором SMA-слой используется в качестве электрода для EAP-слоя - может быть легко реализован. Дополнительно, посредством использования способа с нанесением покрытия, исполнительный механизм может быть более тонким, поскольку не требуется никакого наслаивающегося слоя, который будет иметь некоторую минимальную требуемую толщину и структурную жесткость.
Как объяснено выше, предпочтительно используется управляемое полем EAP-устройство, но настоящее изобретение не ограничено такими EAP-устройствами. Однако электроактивные полимеры, которые могут быть использованы, могут быть подразделены на управляемые полем и управляемые ионами материалы.
Примеры управляемых полем EAP включают в себя пьезоэлектрические полимеры, электрострикционные полимеры (такие как основанные на PVDF релаксорные полимеры или полиуретаны) и диэлектрические эластомеры. Другие примеры включают в себя электрострикционные привитые сополимеры, электрострикционную бумагу, электреты, электровискоэластичные эластомеры и жидкокристаллические эластомеры.
Примерами управляемых ионами EAP являются сопряженные/ проводящие полимеры, ионные композиты полимер - металл (Ionic Polymer Metal Composite - IPMC) и углеродные нанотрубки (carbon nanotube - CNT). Другие примеры включают в себя ионные полимерные гели.
Управляемые полем EAP активируются электрическим полем посредством прямого электромеханического соединения. Они обычно требуют больших напряженностей поля (порядка вольт на метр), но малых токов. Слои полимера являются обычно тонкими для поддержания управляющего электрического напряжения как можно меньшим. Ионные EAP активируются электрически индуцируемым перемещением ионов и/или растворителя. Они обычно требуют низких электрических напряжений, но больших токов. Они обычно требуют среды жидкого/ гелеобразного электролита (хотя некоторые системы материалов могут также функционировать с использованием твердых электролитов). Оба класса EAP имеют множественных представителей семейства, каждый из которых имеет свои собственные преимущества и недостатки.
Первым заметным подклассом управляемых полем EAP являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханическая эффективность традиционных пьезоэлектрических полимеров является ограниченной, прорыв в улучшении этой эффективности привел к созданию PVDF релаксорных полимеров, которые демонстрируют спонтанную электрическую поляризацию (управляемое полем выравнивание). Эти материалы могут быть предварительно деформированы для обеспечения улучшенной эффективности в деформированном направлении (предварительное деформирование приводит к лучшему молекулярному выравниванию). Обычно используются металлические электроды, поскольку деформации обычно реализуются в умеренном режиме (1-5%). Другие типы электродов (такие как проводящие полимеры, сажевые масла, гели или эластомеры, и т.д.) также могут быть использованы. Электроды могут быть непрерывными или сегментированными.
Другим интересным подклассом управляемых полем EAP является подкласс диэлектрических эластомеров. Тонкая пленка этого материала может быть прослоена между деформируемыми электродами, образуя конденсатор с параллельными обкладками. В случае диэлектрических эластомеров, механическое напряжение Максвелла, индуцируемое приложенным электрическим полем, приводит к механическому напряжению на пленке, что вызывает ее сжатие в толщине и расширение по площади. Эффективность деформации обычно повышается посредством предварительного деформирования эластомера (требующего каркаса для удерживания предварительной деформации). Деформации могут быть значительными (10-300%). Это также ограничивает тип электродов, которые могут быть использованы: для малых и умеренных деформаций, могут рассматриваться металлические электроды и проводящие полимерные электроды, для режима высоких деформаций обычно используются сажевые масла, гели или эластомеры. Электроды могут быть непрерывными или сегментированными.
Первым заметным подклассом ионных EAP являются ионные композиты полимер - металл (IPMC). IPMC состоят из набухающей при растворении ионообменной полимерной мембраны, прослоенной между двумя тонкими металлическими или углеродными электродами, и требуют использования электролита. Типичными электродными материалами являются Pt, Gd, CNTs, CPs, Pd. Типичными электролитами являются водные растворы Li+ и Na+. При приложении поля, катионы обычно перемещаются к катодной стороне вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в катодной области приводит к механическому напряжению в остальной части полимерной матрицы, приводящему к изгибу по направлению к аноду. Реверсирование прикладываемого электрического напряжения инвертирует изгиб. Хорошо известными полимерными мембранами являются Nafion® и Flemion®.
Другим заметным подклассом ионных EAP являются сопряженные/ проводящие полимеры. Исполнительный механизм на основе сопряженного полимера обычно состоит из электролита, находящегося между двумя слоями сопряженного полимера. Электролит используется для изменения степени окисления. Когда потенциал прикладывается к полимеру через электролит, электроны добавляются или удаляются из полимера, что запускает окисление и восстановление. Восстановление приводит к сжатию, окисление приводит к расширению.
В некоторых случаях, добавляют тонкопленочные электроды, когда сам полимер не имеет достаточной проводимости (в зависимости от размера). Электролит может быть жидкостью, гелем или твердым материалом (т.е. комплексным соединением высокомолекулярных полимеров и солей металлов). Наиболее распространенными сопряженными полимерами являются полипиррол (PPy), полианилин (PANi) и политиофен (PTh).
Исполнительный механизм может быть также образован из углеродных нанотрубок (CNT), суспендированных в электролите. Электролит образует двойной слой с нанотрубками, что обеспечивает возможность инжекции зарядов. Эта инжекция зарядов с двух слоев рассматривается как основной механизм в исполнительных механизмах на CNT. CNT действует как электродный конденсатор с зарядом, инжектируемым в CNT, который затем уравновешивается электрическим двойным слоем, образованным перемещением электролита к поверхности CNT. Изменение заряда на атомах углерода приводит к изменениям длины связи С-С. В результате, можно наблюдать расширение и сжатие единственной CNT.
Материалы, подходящие для EAP-слоя, являются известными. Электроактивные полимеры включают в себя, но не ограничены этим, подклассы: пьезоэлектрические полимеры, электромеханические полимеры, релаксорные ферроэлектрические полимеры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, ионные композиты полимер - металл, ионные гели и полимерные гели.
Подкласс электрострикционных полимеров включает в себя, но не ограничен этим:
поливинилиденфторид (PVDF), поливинилиденфторид - трифторэтилен (PVDF-TrFE), поливинилиденфторид - трифторэтилен - хлорфторэтилен (PVDF-TrFE-CFE), поливинилиденфторид - трифторэтилен - хлортрифторэтилен (PVDF-TrFE-CTFE), поливинилиденфторид - гексафторпропилен (PVDF-HFP), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает в себя, но не ограничен этим:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает в себя, но не ограничен этим:
полипиррол, поли-3,4,-этилендиокситиофен, поли(п-фениленсульфид), полианилины.
Ионные устройства могут быть основаны на ионных композитах полимер - металл (IPMC) или сопряженных полимерах. Ионный композит полимер - металл (IPMC) является синтетическим композитным наноматериалом, который демонстрирует поведение искусственной мышцы при приложении электрического напряжения или электрического поля.
Более подробно, IPMC составлены из ионного полимера, такого как Nafion или Flemion, поверхности которого химически или физически покрыты проводниками, такими как платина или золото, или углеродными электродами. При приложении электрического напряжения, перераспределение и миграция ионов вследствие электрического напряжения, приложенного к полосе IPMC, приводит к деформации изгиба. Полимер является набухающей при растворении ионообменной полимерной мембраной. Поле вызывает перемещение катионов к катодной стороне вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в катодной области приводит к механическому напряжению в остальной части полимерной матрицы, приводящему к изгибу по направлению к аноду. Реверсирование прикладываемого электрического напряжения инвертирует изгиб.
Если гальванически нанесенные электроды расположены в несимметричной конфигурации, то приложенное электрическое напряжение может индуцировать все виды деформаций, такие как скручивание, закатывание, кручение, поворачивание, и несимметричная деформация изгиба.
Во всех этих примерах, могут быть обеспечены дополнительные пассивные слои для обеспечения влияния на электрическое и/или механическое поведение EAP-слоя в ответ на приложенное электрическое поле.
EAP-слой каждого устройства может быть прослоен между электродами. Электроды могут быть растяжимыми таким образом, чтобы они следовали за деформацией слоя EAP-материала. Материалы, подходящие для электродов, также являются известными, и могут быть, например, выбраны из группы, состоящей из тонких металлических пленок, таких как золотые, медные, или алюминиевые пленки, или органических проводников, таких как углеродная сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен) поли(стиролсульфонат) (PEDOT:PSS). Металлизированные полиэфирные пленки также могут быть использованы, например, металлизированный полиэтилентерефталат (PET), например, с использованием алюминиевого покрытия.
Другие варианты для раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при применении на практике заявленного изобретения, из изучения чертежей, раскрытия сущности изобретения, и прилагаемой формулы изобретения. В формуле изобретения, слово «содержащий» не исключает других элементов или этапов, а форма единственного числа не исключает множественного числа. Тот факт, что некоторые меры изложены во взаимно отличающихся зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может быть использована для получения преимущества. Никакие ссылочные позиции в формуле изобретения не должны толковаться в качестве ограничения объема формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО МАТЕРИАЛА И СПОСОБ ВОЗБУЖДЕНИЯ | 2018 |
|
RU2766272C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО, ВКЛЮЧАЮЩЕЕ В СЕБЯ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА, И СПОСОБ ВОЗБУЖДЕНИЯ | 2018 |
|
RU2764083C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2745005C2 |
| УПРАВЛЕНИЕ ЖЕСТКОСТЬЮ ДЛЯ ЭЛЕКТРОАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ | 2017 |
|
RU2748051C2 |
| ИСПОЛНИТЕЛЬНОЕ И СЧИТЫВАЮЩЕЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2018 |
|
RU2753750C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ НЕГО | 2017 |
|
RU2750855C2 |
| ТЕРМОЧУВСТВИТЕЛЬНОЕ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО | 2015 |
|
RU2704930C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО МАТЕРИАЛА | 2018 |
|
RU2762347C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ СЧИТЫВАНИЯ, ОСНОВАННЫЙ НА ЭЛЕКТРОАКТИВНОМ МАТЕРИАЛЕ | 2017 |
|
RU2720128C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2730430C2 |

Термически и электрически управляемый миниатюризированный исполнительный механизм содержит двуслойную структуру, образованную из слоя сплава с памятью формы, соединенного со слоем электроактивного полимера. Нагревательное средство обеспечено для тепловой стимуляции слоя сплава с памятью формы, причем этот слой переходит из исходной формы при первой температуре во вторую заданную форму при второй температуре. Приложение электрического поля к слою электроактивного полимера стимулирует этот слой деформироваться в ответ с механическим напряжением, которое может превышать механическое напряжение слоя сплава, когда последний слой находится в низкотемпературной фазе. Дополнительно обеспечены способы срабатывания, которые включают в себя стимулирование слоя полимера деформироваться в противоположном «направлении» по отношению к деформации слоя сплава, что позволяет исполнительному механизму быть «сброшенным» между перемещениями. Также обеспечены способы изготовления исполнительного механизма. 6 н. и 9 з.п. ф-лы, 10 ил.
1. Двунаправленный исполнительный механизм, содержащий: теплочувствительный слой (24) с памятью формы, который содержит сплав с памятью формы, причем сплав существует в первой фазе ниже первой температуры и во второй фазе выше второй температуры, и при этом переход из первой фазы во вторую фазу стимулирует переход слоя из любой первой формы во вторую заданную форму;
слой (22) электроактивного полимера, соединенный со слоем сплава с памятью формы таким образом, чтобы они оба имели одну и ту же форму, причем слой электроактивного полимера является деформируемым, в ответ на приложенное электрическое напряжение;
и нагревательное средство для управления температурой теплочувствительного слоя с памятью формы, причем
теплочувствительный слой с памятью формы и слой электроактивного полимера, соединенный со слоем сплава с памятью формы, выполнены с возможностью двунаправленной функциональности, при которой теплочувствительный слой с памятью формы деформируется и переходит из первой формы во вторую заданную форму с первой силой при переходе температуры из первой фазы во вторую фазу,
электроактивный полимер обеспечивает возможность деформации со второй силой и перехода теплочувствительного слоя с памятью формы из второй формы в первую форму, посредством приложения электрического поля, причем вторая сила меньше первой силы,
и управление скоростью и размером перехода из второй формы в первую форму осуществляется изменением напряженности приложенного электрического поля.
2. Исполнительный механизм по п. 1, в котором нагревательное средство содержит по меньшей мере два контактных вывода (28, 30), находящихся в электрической связи со сплавом (24) с памятью формы, для подвода электрического тока через сплав.
3. Исполнительный механизм по п. 1, в котором нагревательное средство содержит нагревательный элемент, находящийся в тепловом контакте со слоем с памятью формы.
4. Исполнительный механизм по любому из пп. 1-3, в котором теплочувствительный слой с памятью формы содержит слой полимерного материала, имеющего встроенную проволоку из сплава с памятью формы.
5. Лучеформирующий элемент (56), содержащий: канал, имеющий одну или несколько граничных стенок (52, 54), причем по меньшей мере одна граничная стенка содержит один или несколько исполнительных механизмов по любому предшествующему пункту.
6. Лучеформирующий элемент (56) по п. 5, дополнительно содержащий один или несколько оптических элементов (66), расположенных на одном конце канала.
7. Адаптивное осветительное устройство, содержащее: один или несколько лучеформирующих элементов (56) по п. 5 или 6; и один или несколько твердотельных осветительных элементов (58), расположенных в пределах по меньшей мере одной граничной стенки канала.
8. Контактирующая с кожей структура (78) для бреющего волосы кожи устройства (80), причем контактирующая с кожей структура предназначена для контактирования с участком кожи во время бритья упомянутой кожи бреющим устройством и содержит исполнительный механизм (72) по любому из пп. 1-4 для изменения относительного положения или ориентации между по меньшей мере частью контактирующей с кожей структуры и участком кожи.
9. Способ двунаправленного срабатывания, включающий: использование нагревательного средства для увеличения температуры первого образующего слой элемента (24), причем этот элемент содержит сплав с памятью формы, и увеличение температуры, стимулируя переход сплава из первой формы при первой температуре во вторую заданную форму при второй температуре; уменьшение температуры первого образующего слой элемента до третьей температуры; и приложение электрического напряжения ко второму образующему слой элементу (22), причем второй образующий слой элемент соединен с первым образующим слой элементом таким образом, что они оба имеют одну и ту же форму, и содержит электроактивный полимер, при этом электрическое напряжение стимулирует этот полимер деформироваться из второй заданной формы в третью форму, причем третья форма зависит от величины электрического напряжения, причем
слой элемента (24) и слой элемента (22) выполнены с возможностью двунаправленной функциональности, при которой теплочувствительный слой с памятью формы деформируется и переходит из первой формы во вторую заданную форму с первой силой при переходе от первой температуры ко второй температуре,
электроактивный полимер обеспечивает возможность деформации и перехода теплочувствительного слоя с памятью формы из второй формы в третью форму посредством приложения электрического поля,
и управление скоростью и размером перехода из второй формы в третью форму осуществляется изменением напряженности приложенного электрического поля, причем сила, развиваемая при переходе из второй формы в третью форму, меньше первой силы.
10. Способ по п. 9, в котором ко второму образующему слой элементу прикладывают электрическое напряжение, имеющее такую величину, чтобы третья форма была идентичной первой форме.
11. Способ по п. 9 или 10, в котором переход формы первого образующего слой элемента используется для обеспечения силы срабатывания.
12. Способ по любому из пп. 9-11, в котором переход формы второго образующего слой элемента используется для обеспечения силы срабатывания.
13. Способ по любому из пп. 9-12, в котором нагревательное средство содержит процесс нагревания джоулевым теплом, в котором ток проходит по меньшей мере через участок первого образующего слой элемента.
14. Способ по любому из пп. 9-13, в котором электрическое напряжение прикладывают ко второму образующему слой элементу (22) через первый образующий слой элемент (24), причем первый образующий слой элемент находится в электрической связи со вторым образующим слой элементом.
15. Способ изготовления двунаправленного исполнительного механизма, включающий: соединение первого образующего слой элемента (24), содержащего сплав с памятью формы, со вторым образующим слой элементом (22), содержащим электроактивный полимер, таким образом, чтобы эти два элемента имели одну и ту же форму;
и обеспечение нагревательного средства (28, 30) таким образом, чтобы нагревательное средство находилось в тепловом контакте с первым образующим слой элементом, причем
теплочувствительный слой с памятью формы и слой электроактивного полимера, соединенный со слоем сплава с памятью формы, выполнены с возможностью двунаправленной функциональности, при которой теплочувствительный слой с памятью формы деформируется и переходит из первой формы во вторую заданную форму с первой силой при переходе температуры из первой фазы во вторую фазу,
электроактивный полимер обеспечивает возможность деформации со второй силой и перехода теплочувствительного слоя с памятью формы из второй формы в первую форму, посредством приложения электрического поля, вторая сила меньше первой силы,
и управление скоростью и размером перехода из второй формы в первую форму осуществляется изменением напряженности приложенного электрического поля.
| US 7575807 B1, 18.08.2009 | |||
| US 2012137672 A1, 07.06.2012 | |||
| US 2014026554 A1, 30.01.2014 | |||
| DE 10142998 A1, 27.03.2003. |

