ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к исполнительному устройству, имеющему управляемую жесткость, и, в частности, к исполнительному элементу на основе электроактивного материала, имеющему управляемую жесткость.
УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Электроактивные материалы (electroactive material - EAM), и, в частности, электроактивные полимеры (electroactive polymer - EAP) являются новым классом материалов в области электрически управляемых материалов. EAP могут работать в качестве датчиков или исполнительных устройств и легко могут быть изготовлены в различных формах, допускающих легкую интеграцию в целый ряд систем.
Были разработаны материалы с характеристиками, такими как механическое напряжение и деформация срабатывания, которые были значительно улучшены за последние десять лет. Технологические риски были снижены до приемлемых для разработки изделий уровней, так что EAP становятся все более интересными с коммерческой и технической точек зрения. Преимущества EAP включают в себя низкую мощность, малый формфактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, малое время срабатывания, и циклическое срабатывание.
Улучшенные характеристики и конкретные преимущества материалов на основе EAP обуславливают их пригодность к новым применениям.
Устройство на основе EAP может быть использовано в любом применении, в котором требуется малая величина перемещения компонента или элемента на основе электрического срабатывания. Подобным образом, эта технология может быть использована для восприятия малых перемещений.
Использование EAP обеспечивает функции, которые были невозможны прежде, или обеспечивает большое преимущество перед обычными решениями датчиков/ исполнительных устройств, вследствие комбинации относительно большой деформации и усилия в малом объеме или тонком формфакторе, по сравнению с обычными исполнительными устройствами. EAP также обеспечивают бесшумную работу, точное электронное управление, быстрое срабатывание, и большой диапазон возможных частот срабатывания, например, 0-1МГц, чаще всего менее 20 кГц.
Устройства, использующие электроактивные полимеры, могут быть подразделены на материалы с полевым управлением и материалы с ионным управлением.
Примеры EAP с полевым управлением включают в себя пьезоэлектрические полимеры, электрострикционные полимеры (такие как релаксорные полимеры на основе PVDF) и диэлектрические эластомеры. Другие примеры включают в себя электрострикционные графт-полимеры, электрострикционную бумагу, электреты, электро-вязкоупругие эластомеры и жидкокристаллические эластомеры.
Примерами EAP с ионным управлением являются сопряженные/проводящие полимеры, ионные полимерно-металлические композиционные материалы (Ionic Polymer Metal Composites - IPMC) и углеродные нанотрубки (carbon nanotube - CNT). Другие примеры включают в себя ионные полимерные гели.
EAP с полевым управлением приводятся в действие электрическим полем посредством прямой электромеханической связи. Им обычно требуются большие напряженности поля (вольт на метр), но низкие токи. Слои полимеров обычно являются тонкими, чтобы поддерживать как можно меньшее управляющее напряжение. Ионные EAP приводятся в действие электрически индуцируемым перемещением ионов или растворителя. Им обычно требуются низкие напряжения, но высокие токи. Им требуется жидкая/ гелевая электролитическая среда (хотя некоторые системы материалов могут также работать с использованием твердых электролитов). Оба класса EAP имеют множество членов семейства, каждый из которых имеет свои собственные преимущества и недостатки.
Первым значительным подклассом EAP с полевым управлением являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханические характеристики традиционных пьезоэлектрических полимеров являются ограниченными, прорыв в улучшении этих характеристик привел к созданию релаксорных полимеров на основе PVDF, которые демонстрируют спонтанную электрическую поляризацию (выравнивание с полевым управлением). Эти материалы могут быть предварительно деформированы для улучшения характеристик в направлении деформации (предварительная деформация приводит к лучшему молекулярному выравниванию). Обычно используют металлические электроды, поскольку деформации обычно осуществляются в умеренном режиме (1-5%). Также могут быть использованы другие типы электродов (например, проводящие полимеры, масла, гели или эластомеры на основе углеродной сажи, и т.д.). Электроды могут быть непрерывными или сегментированными.
Другим интересным подклассом EAP с полевым управлением является подкласс диэлектрических эластомеров. Тонкая пленка этого материала может быть расположена между деформируемыми электродами, в результате чего образуется плоский конденсатор. В случае диэлектрических эластомеров, максвелловское механическое напряжение, индуцируемое приложенным электрическим полем, приводит к механическому напряжению на пленке, вызывающему ее сжатие по толщине и расширение по площади. Характеристики деформации обычно увеличиваются посредством предварительного деформирования эластомера (причем требуется каркас для удерживания предварительной деформации). Деформации могут быть значительными (10-300%). Это также ограничивает типы электродов, которые могут быть использованы: для малых и умеренных деформаций могут быть использованы металлические электроды и электроды на основе проводящих полимеров, для режима больших деформаций обычно используют масла, гели или эластомеры на основе углеродной сажи. Электроды могут быть непрерывными или сегментированными.
Первым значительным подклассом ионных EAP являются ионные полимерно-металлические композиционные материалы (Ionic Polymer Metal Composites - IPMC). IPMC состоят из набухающей в растворителе ионообменной полимерной мембраны, ламинированной между двумя тонкими электродами на основе металла или углерода, и требуют использования электролита. Типичными материалами электродов являются Pt, Gd, CNT, CP, Pd. Типичными электролитами являются растворы Li+ и Na+ на водной основе. При приложении поля, катионы обычно перемещаются на сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в области катода приводит к механическому напряжению в остальной части полимерной матрицы, которое приводит к изгибу по направлению к аноду. Изменение прикладываемого напряжения на обратное инвертирует изгиб. Общеизвестными полимерными мембранами являются Nafion (товарный знак) и Flemion (товарный знак).
Другим значительным подклассом ионных полимеров являются сопряженные/проводящие полимеры. Исполнительное устройство на основе сопряженного полимера обычно состоит из электролита, расположенного между двумя слоями сопряженного полимера. Электролит используют для изменения степени окисления. При подаче потенциала на полимер через электролит, электроны добавляются к полимеру или удаляются из него, что возбуждает окисление и восстановление. Восстановление приводит к сжатию, окисление приводит к расширению.
В некоторых случаях, добавляют тонкопленочные электроды, когда сам полимер имеет недостаточную удельную электропроводность (в отношении размера). Электролит может быть жидкостью, гелем или твердым материалом (т.е. комплексом полимеров с большим молекулярным весом и солей металлов). Наиболее распространенными сопряженными полимерами являются полипиррол (PPy), полианилин (PANi) и политиофен (PTh).
Исполнительное устройство может быть также образовано из углеродных нанотрубок (Carbon Nano Tube - CNT), суспендированных в электролите. Электролит образует двойной слой с нанотрубками, что обеспечивает возможность инжекции зарядов. Эта инжекция зарядов двойного слоя считается основным механизмом в исполнительных устройствах на основе CNT. CNT действует в качестве электродного конденсатора с зарядом, инжектированным на CNT, который затем уравновешивается электрическим двойным слоем, образуемым посредством перемещения электролита к поверхности CNT. Изменение заряда на атомах углерода приводит к изменениям длины связи С-С. В результате, можно наблюдать расширение и сжатие единственной CNT.
Фиг. 1 и 2 показывают два возможных режима работы устройства на основе EAP.
Устройство содержит слой 8 электроактивного полимера, расположенный между электродами 4, 6, расположенными на противоположных сторонах слоя 8 электроактивного полимера.
Фиг. 1 показывает устройство, которое не закреплено. Чтобы вызвать показанное расширение слоя электроактивного полимера во всех направлениях, используют напряжение.
Фиг. 2 показывает устройство, которое выполнено таким образом, что расширение возникает только в одном направлении. Это устройство поддерживается несущим слоем 10. Чтобы вызвать изгиб или выгиб слоя электроактивного полимера, используют напряжение.
Можно считать, что электроды, слой электроактивного полимера, и несущий слой вместе образуют общую конструкцию на основе электроактивного полимера.
Природа этого перемещения состоит, например, во взаимодействии между активным слоем, который расширяется при срабатывании, и пассивным несущим слоем. Для получения показанного асимметричного изгиба вокруг некоторой оси, может быть применена, например, молекулярная ориентация (растяжение пленки), усиливающая перемещение в одном направлении.
Расширение в одном направлении может быть результатом асимметрии EAP-полимера, или оно может быть результатом асимметрии свойств несущего слоя, или оно может быть результатом комбинации обоих факторов.
Конструкция на основе электроактивного полимера, описанная выше, может быть использована как для срабатывания, так и для восприятия. Наиболее известные механизмы восприятия основаны на измерениях усилия и детектировании деформации. Диэлектрические эластомеры, например, могут быть легко растянуты под действием внешней силы. Посредством подачи низкого напряжения на датчик, деформация может быть измерена в зависимости от напряжения (напряжение зависит от площади). Другой способ восприятия с использованием систем с полевым управлением состоит в прямом измерении изменения емкости или в измерении изменений сопротивления электродов в зависимости от деформации.
Датчики на основе пьезоэлектрических и электрострикционных полимеров могут генерировать электрические заряд в ответ на приложенное механическое напряжение (при условии, что степень кристалличности является достаточно высокой для генерирования детектируемого изменения). Сопряженные полимеры могут использовать пьезо-ионный эффект (механическое напряжение приводит к обнаружению ионов). В CNT под действием механического напряжения возникает изменение заряда на поверхности CNT, которое может быть измерено. Также было показано, что сопротивление CNT изменяется в контакте с молекулами газов (например, O2, NO2), что делает CNT полезными в качестве детекторов газов.
Исполнительные устройства/ датчики на основе EAP имеют многочисленные возможные применения. Для дополнительного увеличения многообразия и диапазона применений этой технологии, желательно улучшить диапазон смещений и усилий срабатывания, обеспечиваемый исполнительными устройствами на основе EAP. Кроме того, желательно улучшить способность исполнительных устройств на основе EAP осуществлять более сложные перемещения и эффекты изменения формы, в том числе, например, многошарнирные движения срабатывания. Такие эффекты в настоящее время обеспечиваются только с использованием EAP-матриц или сегментированных EAP-конструкций, которые являются сложными в конструировании и более дорогими в изготовлении.
Таким образом, желательны исполнительные устройства на основе EAP, обеспечивающие улучшенную функцию срабатывания.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Авторам изобретения стало понятно, что диапазон движений и усилий, обеспечиваемых единственной EAP-конструкцией, может быть увеличен в случае, если будет возможна большая степень управления жесткостью конструкции. Управление жесткостью в исполнительных устройствах на основе EAP является в настоящее время сильно ограниченным в данной области техники и распространяется, самое большее, на избирательное чередование двух разных двоичных состояний гибкости материала.
EAP по существу демонстрируют некоторую степень изменения жесткости, возникающую в результате сжатия, возникающего в материале после электрической стимуляции. Этот эффект, однако, является относительно малым (например, коэффициент изменения жесткости равен только 5 или 6 в случае предварительно деформированного исполнительного устройства), и, дополнительно, изменение жесткости прямо связано с деформацией исполнительного устройства.
Желательно обеспечить исполнительное устройство на основе электроактивного полимера, имеющее жесткость (например, модуль Юнга или динамический модуль упругости), которая может изменяться по меньшей мере больше, чем на порядок величины, и которая является управляемой стимулом, независимым от электрического стимула, используемого для управления срабатыванием EAP.
Такая независимо управляемая жесткость может обеспечить, чтобы исполнительное устройство на основе EAP обеспечивало значительно больший диапазон усилий и смещений, чем диапазон усилий и смещений, возможный в настоящее время при использовании устройств с постоянной жесткостью. Дополнительно, станет возможным обеспечить устройства, имеющие переменные профили жесткости и демпфирования, или обеспечивающие сложные (матричные, световые) эффекты изменения формы; функциональность, которая в настоящее время возможна только с использованием матриц или посредством использования сегментированных конструкций на основе электроактивных полимеров.
Известна временная настройка жесткости исполнительного устройства на основе EAP между двумя разными уровнями для обеспечения бистабильной функциональности. Патент США № 8237324, например, раскрывает нагревание преобразователя на основе электроактивного полимера с температуры ниже его температуры стеклования до температуры выше его температуры стеклования для обеспечения возможности легкой деформации посредством электрической стимуляции. После обеспечения деформации исполнительного устройства, срабатывание делается стабильным посредством еще одного охлаждения исполнительного устройства до температуры ниже его температуры стеклования. Раскрыто, что светопоглощающие частицы могут быть использованы в некоторых примерах, чтобы помочь в процессе нагревания.
Такие способы, однако, обеспечивают только ограниченную степень управления жесткостью исполнительного устройства на основе EAP, причем обеспечиваемые состояния связаны, в частности, с проблемой улучшения бистабильности конструкции исполнительного устройства. Обеспечиваются только два состояния жесткости, соответствующие двум фазам материала при температурах выше и ниже температуры стеклования.
Таким образом, требуются устройства и способы для обеспечения увеличенной степени управления жесткостью исполнительного устройства на основе EAP.
Настоящее изобретение определяется формулой изобретения.
Согласно одному аспекту настоящего изобретения, обеспечено исполнительное устройство, имеющее настраиваемый профиль жесткости и содержащее:
исполнительный элемент, содержащий:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
светопоглощающие наполнительные элементы в электроактивном материале, выполненные с возможностью поглощать энергию падающего света и преобразовывать ее в тепловую энергию;
управляемый источник света, оптически связанный с исполнительным элементом и выполненный с возможностью обеспечивать световой выход для исполнительного элемента, причем световой выход является управляемым в диапазоне разных уровней интенсивности и/или спектральных составов для управляемой настройки профиля жесткости исполнительного элемента; и
контроллер, выполненный с возможностью управлять уровнем интенсивности и/или спектральным профилем светового выхода для избирательной реализации в исполнительном элементе любого профиля жесткости из диапазона, состоящего по меньшей мере из трех разных профилей жесткости.
Варианты осуществления настоящего изобретения, таким образом, обеспечивают исполнительное устройство на основе EAM, имеющее жесткость, которая является управляемой посредством светового стимула. Посредством изменения интенсивности и/или спектрального профиля светового выхода, направленного на исполнительный элемент, можно точно управлять профилем жесткости, демонстрируемым исполнительным элементом.
Светопоглощающие наполнители выполнены со свойством поглощать свет и эффективно преобразовывать его в тепловую энергию, причем тепловая энергия затем излучается или проводится за пределы наполнителей в материал на основе электроактивного полимера, окружающий их. Когда материал на основе электроактивного полимера нагревается, его жесткость непрерывно уменьшается, причем изменение жесткости прямо зависит от вызываемого изменения температуры.
Облучение светопоглощающих наполнителей, таким образом, обеспечивает эффективное и точно управляемое средство для изменения жесткости электроактивного материала, посредством механизма стимулируемого светом нагревания. Нагревание с использованием чувствительных к свету наполнителей обеспечивает значительно более эффективное и управляемое средство для нагревания, чем, например, типичные способы на основе теплопереноса (с использованием, например, прикрепляемых нагревательных элементов или полос). Наполнители встраивают в электроактивный материал, и, следовательно, они могут передавать 100% генерируемого в них тепла в сам материал, без каких-либо (по меньшей мере начальных) потерь в окружающей среде. Дополнительно, с использованием встроенных наполнителей, можно (согласно по меньшей мере некоторым примерам) избирательно управлять нагреванием только некоторых участков или секций EAM-слоя и не нагревать другие участки или секции EAM-слоя. Это значительно труднее обеспечить с использованием способов на основе внешнего теплопереноса. Большее управление нагреванием приводит к большему управлению жесткостью.
Электроактивный материал функционирует в качестве опорной матрицы, в которую встроен наполнитель, например, малые частицы.
Уровень интенсивности света относится в широком смысле к световой выходной мощности или уровню света, и не обязательно относится к какой-либо конкретной физической величине. Он может, исключительно в качестве примера, относиться к любому из: светового потока, световой мощности, потока излучения излучаемого света, интенсивности излучения, интенсивности света, спектральной световой эффективности, энергетической освещенности, яркости или энергетической яркости.
Спектральный состав относится к составу света в терминах его составляющих длин волн или частот. Он может быть интерпретирован как ссылка, например, на спектр излучения управляемого источника света.
Профиль жесткости может относиться к уровню или степени жесткости, демонстрируемой однородно по всему исполнительному элементу. Альтернативно, профиль жесткости может относиться к пространственному профилю жесткости, который изменяется локально на протяжении исполнительного элемента.
Термин «жесткость», дополнительно, следует интерпретировать в широком смысле как ссылку, в общем, на свойство гибкости или твердости или упругости материала. Он не обязательно относится к какой-либо конкретной физической величине. Однако, в конкретных примерах, он может включать в себя, например, модуль Юнга или динамический модуль упругости материала.
Согласно одному или более вариантам осуществления, контроллер может быть выполнен с возможностью управлять уровнем интенсивности и/или спектральным профилем светового выхода для реализации по меньшей мере на участке исполнительного элемента любого уровня жесткости из непрерывного спектра уровней жесткости. Уровень интенсивности, например, может быть управляемым по всему непрерывному спектру значений интенсивности. Уровень жесткости по меньшей мере участка исполнительного элемента может прямо зависеть от интенсивности падающего света. Таким образом, контроллер может быть выполнен с возможностью обеспечивать любой уровень жесткости из непрерывного спектра уровней жесткости посредством избирательного управления выходной интенсивностью источника света для излучения света с интенсивностью, которая, как известно, соответствует данному требуемому уровню жесткости материала.
Согласно любому варианту осуществления настоящего изобретения, контроллер может быть выполнен с возможностью избирательно управлять профилем жесткости, реализуемым в исполнительном элементе, на основе предопределенного плана управления и/или на основе одного или более входных параметров управления. Контроллер может, например, содержать программные команды, причем программные команды, выполняемые на контроллере, заставляют его выполнять этапы конкретного плана или программы управления. План или программа управления может, например, включать в себя циклическое прохождение через последовательность разных профилей жесткости исполнительного элемента посредством управления источником света таким образом, чтобы он циклически проходил через последовательность разных выходных уровней или режимов, каждый их которых соответствует конкретному требуемому профилю жесткости исполнительного элемента.
Предопределенный план управления может в примерах включать в себя этапы, зависящие от одного или более входных параметров. Входные параметры могут в примерах включать в себя пользовательские входные команды или параметры. В дополнительных примерах, входные параметры могут быть параметрами, получаемыми посредством одного или более сенсорных устройств, например, датчиков температуры или датчиков жесткости.
Согласно одному или более вариантам осуществления, светопоглощающие элементы могут быть неоднородно распределены в электроактивном полимере для обеспечения реализации пространственно неоднородных профилей жесткости в исполнительном элементе. Например, светопоглощающие наполнительные элементы могут быть распределены в множестве пространственно дискретных концентраций наполнительных элементов.
Посредством обеспечения в исполнительном элементе пространственно сконцентрированных кластеров светопоглощающих наполнителей, могут быть обеспечены локально меняющиеся изменения жесткости. В частности, в тех местоположениях, в которых имеются большие концентрации EAP-наполнителей, будет обычно обеспечиваться большая степень нагревания (после облучения исполнительного элемента однородно распределенным светом), чем в тех местоположениях, в которых имеются меньшие концентрации частиц наполнителя.
Области с большими концентрациями будут в результате демонстрировать большую степень изменения жесткости, чем области с меньшими концентрациями, причем области с большими концентрациями становятся относительно более гибкими по сравнению с областями с меньшими концентрациями. Таким образом, неоднородное пространственное распределение наполнительных элементов может привести к обеспечению пространственно неоднородных профилей жесткости по всему исполнительному элементу.
Согласно одному или более вариантам осуществления, исполнительный элемент может содержать множество разных локально сконцентрированных групп светопоглощающих наполнительных элементов, причем каждая группа выполнена с возможностью поглощать свет отличного диапазона длин волн, и
причем контроллер выполнен с возможностью управлять спектральным составом светового выхода согласно определенному плану управления для реализации конкретного профиля жесткости исполнительного элемента.
В частности, контроллер может быть выполнен с возможностью управлять световым выходом таким образом, чтобы он содержал длины волн света, к которым только некоторое подмножество групп наполнительных элементов является чувствительным. Таким образом, контроллер может избирательно стимулировать нагревание только некоторых областей или секций исполнительного элемента и посредством этого реализовывать конкретный требуемый профиль жесткости, соответствующий этой схеме нагревания.
Контроллер, соответственно, может быть выполнен с возможностью избирательно управлять локальной жесткостью исполнительного элемента в одной или более областях исполнительного элемента посредством избирательного включения или исключения длин волн света, к которым наполнительные элементы, включенные в упомянутые одну или более областей, являются чувствительными.
Согласно одному или более вариантам осуществления, исполнительное устройство может содержать пакетированную систему множественных разных планарных концентраций наполнительных элементов, пакетированных вдоль оси, продолжающейся параллельно оптической оси светового выхода, и причем каждая планарная концентрация выполнена с возможностью поглощать отличающуюся часть спектрального состава светового выхода. Пакет планарных концентраций эффективно образует пакет слоев, причем каждый слой заполнен частицами наполнителя, поглощающими отличное множество длин волн света.
Каждая из планарных концентраций может быть, например, выполнена с возможностью поглощать так называемые субтрактивные цвета источника белого света. Например, каждый пакет из трех планарных концентраций может быть выполнен с возможностью поглощать голубой, пурпурный, и желтый свет, соответственно. Таким образом, может быть поглощена только голубая часть источника белого света, падающая на первый планарный слой, причем пурпурная и желтая части света пропускаются через остальные два слоя, расположенные ниже. Пурпурная часть может быть затем поглощена вторым слоем, причем желтый свет пропускается к третьему слою.
Состав света может быть настроен согласно тому, какие из слоев требуется стимулировать. Например, источник света может содержать только голубой и желтый свет, чтобы средний слой не стимулировался.
Таким образом, избирательное нагревание двух или более планарных концентраций элементов, пакетированных поверх друг друга, может быть обеспечено посредством освещения только одной стороны пакета.
Согласно одному или более вариантам осуществления, управляемый источник света и исполнительный элемент могут быть оптически связаны посредством удлиненного световода, и, необязательно, упомянутый удлиненный световод может быть оптическим волокном.
Согласно любому варианту осуществления настоящего изобретения, светопоглощающие наполнительные элементы могут содержать наполнительные элементы, образованные по меньшей мере из одного из:
черного пигмента;
переходного металла;
соответствующего конкретным длинам волн красителя;
люминофора; и
флуорофора.
Согласно одному или более вариантам осуществления, светопоглощающие наполнительные элементы могут содержать материал, имеющий такой температурно-зависимый коэффициент оптического пропускания, что коэффициент оптического пропускания перестает изменяться (имеет плато) при конкретной температуре, и, необязательно, коэффициент оптического пропускания перестает изменяться (имеет плато) для температур выше температуры стеклования материала на основе электроактивного полимера.
Примеры согласно дополнительному аспекту настоящего изобретения обеспечивают удлиненный зонд, имеющий управляемую секцию, причем удлиненный зонд содержит одно или более из любых исполнительных устройств, описанных выше, для обеспечения управления упомянутой управляемой секцией. Удлиненный зонд может в конкретных примерах быть катетером или проволочным проводником. Исполнительные элементы исполнительных устройств могут быть в примерах включены или встроены в стенки удлиненного зонда для обеспечения управления наконечником. В конкретных примерах, удлиненный зонд может содержать множество исполнительных устройств. В этих случаях, необязательно, два или более исполнительных устройств могут совместно использовать единственный контроллер.
Согласно одному или более вариантам осуществления, удлиненный зонд может содержать пару противоположных исполнительных элементов для управления управляемой секцией, причем жесткость двух упомянутых исполнительных элементов взаимно-обратно управляется таким образом, чтобы после управления в любом данном направлении, механически активный один из упомянутых двух исполнительных элементов управлялся таким образом, чтобы он имел высокую жесткость, для обеспечения большого активного усилия срабатывания, и механически пассивный один из упомянутых двух исполнительных элементов управлялся таким образом, чтобы он имел низкую жесткость, для обеспечения минимального сопротивления усилию срабатывания.
В конкретных примерах, удлиненный зонд может содержать выделенный световод для каждого исполнительного элемента, для обеспечения отдельно управляемого светового выхода для каждого исполнительного элемента.
Примеры согласно дополнительному аспекту настоящего изобретения также обеспечивают способ избирательного управления профилем жесткости исполнительного элемента, причем исполнительный элемент содержит:
электроактивный материал, выполненный с возможностью деформироваться в ответ на приложение электрического стимула, и
светопоглощающие наполнительные элементы в электроактивном материале, выполненные с возможностью поглощать энергию падающего света и преобразовывать ее в тепловую энергию,
причем способ содержит этапы, на которых:
направляют световой выход на исполнительный элемент, причем световой выход имеет управляемый уровень интенсивности и/или спектральный состав; и
управляют уровнем интенсивности и/или спектральным профилем светового выхода для избирательной реализации в исполнительном элементе любого профиля жесткости из диапазона, состоящего по меньшей мере из трех разных профилей жесткости.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры настоящего изобретения будут теперь подробно описаны со ссылкой на сопутствующие чертежи, в которых:
Фиг. 1 показывает известное устройство на основе электроактивного полимера, которое не закреплено;
Фиг. 2 показывает известное устройство на основе электроактивного полимера, которое ограничено подложкой;
Фиг. 3 схематично показывает первое иллюстративное исполнительное устройство согласно одному или более вариантам осуществления настоящего изобретения;
Фиг. 4 показывает график, показывающий зависимость упругости от температуры для типичного материала на основе электроактивного полимера;
Фиг. 5 схематично показывает исполнительный элемент второго иллюстративного исполнительного устройства согласно одному или более вариантам осуществления;
Фиг. 6 схематично показывает катетер, содержащий одно или более иллюстративных исполнительных устройств, согласно одному или более вариантам осуществления;
Фиг. 7 схематично показывает исполнительный элемент третьего иллюстративного исполнительного устройства согласно одному или более вариантам осуществления;
Фиг. 8 схематично показывает проволочный проводник, содержащий иллюстративное исполнительное устройство, согласно одному или более вариантам осуществления настоящего изобретения;
Фиг. 9 схематично показывает исполнительный элемент четвертого иллюстративного исполнительного устройства согласно одному или более вариантам осуществления настоящего изобретения;
Фиг. 10 показывает график, показывающий зависимость коэффициента оптического пропускания от температуры для нескольких разных полимеров; и
Фиг. 11 схематично показывает исполнительный элемент пятого иллюстративного исполнительного устройства согласно одному или более вариантам осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Настоящее изобретение обеспечивает исполнительное устройство на основе электроактивного материала, имеющее управляемый профиль жесткости. Исполнительный элемент этого устройства содержит электроактивный материал, такой как электроактивный полимер, имеющий светопоглощающие наполнительные элементы, встроенные в него или содержащиеся в нем. Светопоглощающие наполнительные элементы выполнены с возможностью поглощать энергию падающего света и преобразовывать ее в тепловую энергию, чтобы, таким образом, нагревать окружающие секции материала на основе EAP. Посредством избирательного управления уровнем интенсивности или спектральным составом источника света, направленного на исполнительный элемент, конкретная степень и распространение нагрева могут быть обеспечены по всему исполнительному элементу и, в результате, конкретный требуемый профиль жесткости или гибкости может быть реализован по всему телу исполнительного элемента.
Фиг. 3 схематично показывает простой первый пример исполнительного устройства согласно одному или более вариантам осуществления настоящего изобретения. Исполнительное устройство содержит исполнительный элемент 12, образованный из материала 16 на основе электроактивного полимера, и множество светопоглощающих наполнительных элементов 20 в материале на основе электроактивного полимера. Устройство дополнительно содержит управляемый источник 24 света, выполненный с возможностью направлять световой выход 26 на исполнительный элемент 12.
Хотя в простой иллюстрации, показанной на фиг. 3, источник 24 света выполнен таким образом, что он прямо обеспечивает световой выход 26 на поверхность исполнительного элемента 12, в альтернативных примерах источник света и исполнительный элемент могут быть непрямо оптически связаны посредством, например, пригодного световода, выполненного с возможностью передавать световой выход между источником света и исполнительным элементом.
Исполнительное устройство дополнительно содержит контроллер 30, оперативно связанный с управляемым источником 24 света и выполненный с возможностью управлять уровнем интенсивности и/или спектральным профилем светового выхода 26, излучаемого источником света.
Светопоглощающие наполнительные элементы 20 образованы из материала, имеющего свойство поглощать падающий свет и преобразовывать этот свет в тепловую энергию. Генерируемая тепловая энергия затем рассеивается из наполнительных элементов вовне в окружающий материал на основе электроактивного полимера исполнительного элемента 12. Светопоглощающие наполнители преобразуют свет в тепло эффективным и управляемым способом, так что температура композиционного материала на основе EAP в исполнительном элементе достигает стабильного уровня быстро и управляемым способом. Конкретная достигаемая температура и время, необходимое для достижения этой температуры, зависят от типа и количества материала наполнителя, а также от соотношения материала наполнителя и материала на основе EAP в исполнительном элементе. Ими можно дополнительно управлять посредством интенсивности или спектрального состава светового выхода 26, направляемого на исполнительный элемент.
Твердость или жесткость исполнительного элемента зависит от его температуры. Это показано на фиг. 4, которая обеспечивает график, показывающий типичную зависимость модуля упругости или динамического модуля упругости от температуры для материала на основе электроактивного полимера. Эта зависимость сохраняется для некоторого количества материалов на основе EAP с полевым управлением и с ионным управлением. Как показано, модуль упругости остается достаточно постоянным для некоторого диапазона температур. При конкретной температуре (в большинстве случаев при температуре стеклования), модуль упругости начинает уменьшаться с относительно высокой скоростью в зависимости от увеличения температуры. При дополнительной, более высокой температуре, модуль упругости материала стабилизируется; причем дальнейшее увеличение температуры незначительно влияет на дополнительные изменения упругости.
В качестве примера, материалы на основе EAP с температурой фазового перехода (температурой стеклования) в диапазоне 0-40°С включают в себя: поли(t-бутилакрилат), поли(винилиденфторид-ко-гексафторпропилен), полиуретан и P(VDF-TrFE-CFE), смешанный с PMMA. Эти вещества представляют одно множество иллюстративных примеров пригодных материалов, которые могут быть, в частности, применимыми в типичных средах (при комнатной температуре). Этот список не является исчерпывающим, и также могут быть использованы другие пригодные материалы (примеры которых будут понятны специалистам в данной области техники).
Посредством управления величиной и плотностью световой энергии, направляемой на исполнительный элемент 12, можно регулировать точную степень нагрева исполнительного элемента, и, в результате, уровень жесткости управляемого исполнительного элемента.
Контроллер 30 может быть в примерах выполнен с возможностью управлять уровнем интенсивности светового выхода 26. «Уровень интенсивности» может, в качестве примера, относиться к световой мощности светового выхода 26. Посредством управления уровнем интенсивности светового выхода, можно управлять скоростью передачи энергии между источником 24 света и светопоглощающими наполнительными элементами 20. Посредством управления скоростью передачи энергии, можно, соответственно, управлять скоростью нагрева исполнительного элемента, вызываемого преобразованием световой энергии в тепловую энергию в светопоглощающих наполнительных элементах. Таким образом, контроллер 30 выполнен с возможностью, посредством управления управляемым источником 24 света, точно управлять состоянием жесткости исполнительного элемента.
В примерах, уровнем интенсивности можно управлять по всему непрерывному спектру разных уровней интенсивности. Согласно этим примерам, непрерывный спектр разных уровней интенсивности может быть обеспечен в пределах исполнительного элемента в зависимости от уровня интенсивности светового выхода, генерируемого источником 24 света.
Исполнительное устройство обеспечивает многочисленные преимущества перед устройствами предшествующего уровня техники. В частности, жесткость исполнительного элемента является управляемой по всему диапазону разных уровней. В частности, контроллер 30 выполнен с возможностью избирательно реализовывать в исполнительном элементе любой профиль жесткости из диапазона из по меньшей мере трех разных профилей жесткости. В конкретном примере фиг. 3, профили жесткости могут относиться к разным уровням жесткости исполнительного элемента, причем каждый уровень жесткости соответствует конкретному уровню интенсивности генерируемого светового выхода 26.
Дополнительно, примеры настоящего изобретения позволяют управлять жесткостью независимо от состояния срабатывания элемента 12. Жесткостью можно полностью управлять посредством настроек светового выхода 26 источника 24 света, который полностью независим от электрической стимуляции, используемой для управления срабатыванием исполнительного элемента 12.
Дополнительно, в примерах настоящего изобретения, тепло, используемое для изменения жесткости исполнительного элемента, генерируется внутри материала самого исполнительного элемента. Эффективность теплопереноса, таким образом, значительно улучшается по сравнению, например, с альтернативными средствами нагревания, такими как, например, обеспечение накладываемых снаружи нагревательных элементов или других устройств для теплопереноса.
Примеры настоящего изобретения позволяют изменять упругость материала на основе электроактивного полимера с коэффициентом более чем 10, что, например, значительно больше изменений жесткости, достижимых по существу посредством механической деформации материала.
Согласно одному или более примерам, контроллер 30 может быть выполнен с возможностью избирательно управлять профилем жесткости, обеспечиваемым в исполнительном элементе, на основе предопределенного плана управления. Предопределенный план управления может в примерах содержать этапы или процессы, зависимые от одного или более входных параметров. Входные параметры могут быть пользовательскими входными параметрами или могут быть входными параметрами, получаемыми, например, от одного или более сенсорных устройств, таких как датчик температуры, термически связанный с исполнительным элементом.
В качестве простого примера, контроллер может быть, например, выполнен с возможностью реализовывать план управления, в котором источник 24 света выполнен с возможностью излучать световой выход 26, достаточный для создания в исполнительном элементе 12 одного профиля жесткости из множества из по меньшей мере трех разных профилей жесткости. План управления может, например, содержать для каждого из возможных профилей жесткости конкретную интенсивность света и/или спектральный состав, которые, как известно, являются достаточными для реализации конкретного профиля жесткости. Контроллер 30 может, например, содержать память, в которой для каждого из возможных профилей жесткости запоминается соответствующее множество световых характеристик для светового выхода, которые необходимы для обеспечения этого профиля в исполнительном элементе.
План управления может, например, включать в себя этап или процесс получения или поиска пользовательской входной команды, причем пользовательская входная команда указывает на конкретный профиль жесткости из упомянутых по меньшей мере трех профилей жесткости, которые контроллер выполнен с возможностью реализовывать в исполнительном элементе. Управляющая команда (команды) может обеспечиваться для контроллера 30 посредством, например, отдельно обеспечиваемого пользовательского интерфейсного устройства. Альтернативно, пригодное пользовательское интерфейсное устройство может содержаться в исполнительном устройстве.
Дополнительно или альтернативно, согласно одному или более примерам, контроллер 30 может быть выполнен с возможностью выполнять план управления, который содержит этапы для циклического прохождения исполнительным элементом 12 через последовательность или прогрессию разных профилей жесткости. Последовательность разных профилей жесткости может быть последовательными профилями вдоль непрерывного спектра профилей (например, отличными однородными уровнями жесткости вдоль непрерывного спектра возможных уровней жесткости). Альтернативно, отличные профили жесткости могут быть дискретными профилями, например, содержащими стимуляцию разных множеств локальных областей в исполнительном элементе 12, для реализации посредством этого разных конфигураций жесткости или разных эффектов изменения формы.
Светопоглощающие наполнительные элементы могут в примерах содержать частицы или гранулы наполнителя. Комбинация материала на основе EAP и встроенных частиц наполнителя может образовывать композиционный материал на основе EAP. В конкретных примерах, наполнительные элементы EAP могут содержать черные пигменты. Черные пигменты могут быть пригодными для использования в комбинации с относительно интенсивным световым выходом 26. Черный цвет пигментов обеспечивает им высокую эффективность поглощения, в результате чего улучшается эффективность переноса энергии между источником 24 света и исполнительным элементом 12. Пригодные черные пигменты включают в себя, в качестве неограничивающего примера, ацетиленовую сажу, сурьмяную чернь, краситель черный сандал (индекс цвета: NBk2), и анилиновую сажу (PBk1). Также имеется большое множество альтернативных черных пигментов, и альтернативно может быть использован любой пригодный пигмент.
Пигменты предпочтительно должны быть электрически непроводящими, чтобы предотвратить короткое замыкание или пробой. Дополнительно, пигменты предпочтительно должны быть нерастворимыми.
Красители также могут быть рассмотрены. Красители обычно не везде являются нерастворимыми (они растворяются в некоторых растворителях), но они являются нерастворимыми в отношении некоторых групп растворителей. Когда красители являются нерастворимыми, они диспергируются как частицы (подобно пигментам) в матрице электроактивного материала. Подходящие примеры включают в себя (только в качестве неограничивающего примера) китайскую тушь, чернь 7984.
В альтернативных примерах могут быть использованы наполнители, которые содержат переходные металлы или основаны на них. Соединения на основе переходных металлов также обеспечивают высокую эффективность поглощения, а также высокую эффективность генерирования тепла в окружающем материале на основе EAP. Пригодные соединения на основе переходных металлов могут включать в себя оксиды никеля или меди.
Дополнительно или альтернативно, светопоглощающие наполнительные элементы 20 могут включать в себя соответствующие конкретным длинам волн красители, такие как люминофоры или флуорофоры. Эти материалы обычно имеют свойство поглощать конкретное множество или спектр длин волн. Включение наполнительных элементов, содержащих такие материалы, обеспечивает соответствующую конкретным длинам волн функциональность поглощения в примерах настоящего изобретения. В частности, посредством включения, например, разных групп наполнительных элементов, каждая из которых выполнена с возможностью поглощения отличного множества длин волн света, более детализированное или локально направленное управление профилем жесткости исполнительного элемента 12 может быть реализовано посредством управления конкретным спектральным составом светового выхода 26, направленного на исполнительный элемент 12.
Светом, например, можно управлять таким образом, чтобы он включал в себя только некоторые длины волн света и не включал в себя другие длины волн света, для избирательной стимуляции, таким образом, нагревания только конкретных подгрупп наполнительных элементов, и обеспечения, таким образом, изменений жесткости только в конкретных локальных областях исполнительного элемента.
Люминофоры, пригодные для использования в таких примерах, включают в себя люминофоры на основе сульфида цинка или оксида иттрия.
Флуорофоры, пригодные для использования в таких примерах, включают в себя красители на основе родамина.
Устройство использует композиционные материалы, которые объединяют электроактивный материал (в частности, полимер) и другие частицы (которые будут называться, в общем, «наполнителем»).
Теперь будет описано средство для изготовления пригодных композиционных материалов на основе EAP, содержащих материал на основе электроактивного полимера, имеющий встроенные или содержащиеся в нем частицы наполнителя, а также эффекты на основе физических и электрических свойств электроактивного материала.
Сначала будет представлен пример электроактивных материалов на основе диэлектрических эластомеров. Эти материалы расположены между двумя электродами для создания исполнительных устройств на основе диэлектрических электроактивных полимеров. Силоксановые каучуки являются основной применяемой группой эластомеров. Деформация является результатом сил притяжения между положительно и отрицательно заряженными электродами.
Введение частиц в силоксаны широко используется в промышленном масштабе. В качестве примера, линзы ультразвуковых преобразователей изготавливаются из силоксана (полидиметилсилоксана - PDMS), заполненного частицами железа и оксида кремния для увеличения акустического полного сопротивления и износостойкости. Соединения на основе PDMS (силоксана), содержащие рутил (TiO2), широко используются для увеличения показателя преломления или для создания белых отражающих материалов.
В отношении характеристик диэлектрического электроактивного полимера, смешивание с электрически непроводящими твердыми частицами, такими как керамические частицы, обеспечивает два основных значительных эффекта. Во-первых, жесткость материала увеличивается, в результате чего требуются большие усилия для получения тех же самых уровней деформации. Другой эффект состоит в том, что диэлектрическая проницаемость композиционного материала изменяется (в общем, диэлектрическая проницаемость наполнителя будет большей, чем диэлектрическая проницаемость силоксанов, которая близка к 3). То, будет ли эффект деформации, зависящий от напряжения, положительным или отрицательным, зависит от диэлектрической проницаемости частиц и размера частиц, поскольку меньшие частицы оказывают большее влияние на жесткость.
Это описано в работе: S. Somiya, "Handbook of Advanced Ceramics: Materials, Applications, Processing, and Properties," in Nonlinear Dielectricity of MLCCs, Waltham, Academic Press, 2013, стр. 415. В качестве примера, добавление частиц увеличивает диэлектрическую проницаемость, а также увеличивает жесткость.
Таким образом, введение наполнителей в эластомеры, чтобы повлиять на свойства диэлектрического электроактивного полимера, является общеизвестным. Добавление частиц с высокой диэлектрической проницаемостью для увеличения диэлектрической проницаемости эластомера и, таким образом, потенциально, эффективности, хорошо изучено.
Силоксановые эластомеры, в общем, изготавливаются посредством смешивания двух компонентов. Один из них содержит платиновый (Pt) или пероксидный отверждающий катализатор. Разные компоненты могут быть смешаны в высокоскоростном смесителе. В том же процессе может быть добавлен наполнитель, или наполнитель может быть уже предварительно смешан с одним или обоими компонентами. Материал наполнителя, в общем, подается в растворителе, который испаряется во время процесса. После или во время смешивания в высокоскоростном смесителе, в общем, вакуум применяют для удаления включений воздуха (и/или растворителей). После этого смесь можно формовать литьем и отверждать. Температура и время отверждения зависят от сорта полимера, но обычно составляют около 80°С для 10 минут. Большинство частиц совместимы с силоксанами, поскольку они не дезактивируют катализатор (например, серосодержащие материалы). Пероксидные отверждающие силоксаны являются менее чувствительными.
Силоксаны могут формоваться литьем под давлением (жидкие силоксановые каучуки (liquid silicone rubbers - LSR)). Упомянутые два компонента после прохождения (статического) смесителя впрыскивают на шнек машины для литья LSR под давлением. Частицы наполнителя могут предварительно смешиваться с одним или обоими компонентами. Материал транспортируется холодным шнеком и впрыскивается в горячую пресс-форму, где он быстро отверждается в зависимости от температуры. Поскольку LSR имеет очень низкую вязкость, могут быть реализованы очень тонкие секции. Типичные температуры отверждения близки к 180°С, и времена отверждения составляют от около 30 секунд до около одной минуты.
Кроме литья и литья под давлением доступно некоторое количество других технологий формования для изготовления компонентов смесей на основе силоксановых каучуков, также и в форме тонких пленок. Примерами являются экструзия (фольга и профили), прокатывание фольги, ламинирование и прокатывание множественных слоев, литье пленки с использованием ножевого устройства, нанесение покрытия методом центрифугирования и трафаретная печать.
Заполнение может быть выполнено локально на месте изготовления, например, с использованием литья под давлением с множественными циклами (литья с двумя или более циклами), розлива силоксана с дозированием и послойного литья силоксана или аддитивной технологии изготовления силоксана (т.е. трехмерной (3D) печати).
Далее будет представлен пример композиционных материалов на основе пьезоэлектрических полимеров.
Были изучены композиционные материалы на основе пьезоэлектрических полимеров, содержащие смесь PVDF (матричного полимера) и керамических частиц, таких как PZT. Пригодны технологии изготовления, такие как формование окунанием а раствор и нанесение покрытия методом центрифугирования. Также пригодны технологии холодного и горячего прессования. После растворения PVDF, испаряют растворитель до тех пор, пока не будет получена вязкая смесь, и затем может быть выполнено смешивание с частицами наполнителя. Могут быть реализованы композиционные материалы на основе PVDF-полимера с хорошо диспергированным гранулометрическим составом и неповрежденной полимерной матрицей.
Далее будет представлен пример исполнительных устройств на основе релаксорных электрострикционных полимеров.
Эти полимеры являются классом полукристаллических терполимеров, которые могут обеспечивать относительно большое усилие со средней деформацией. Таким образом, эти исполнительные устройства имеют широкий диапазон возможных применений. Релаксорные электрострикционные полимеры были созданы на основе «нормальных» PVDF-полимеров посредством использования надлежащих модификаций дефектов. Они содержат: винилиденфторид (vinylidene fluoride - VDF), трифторэтилен (trifluoroethylene - TrFE), и 1, 1-хлорфторэтилен (1, 1-chlorofluoroethylene - CFE) или хлортрифторэтилен (Chlorotrifluoro ethylene - CTFE).
Добавление дефектов в форме химических мономеров, таких как 1, 1-хлорфторэтилен (CFE), которые сополимеризуются с VDF-TrFE, устраняет нормальную сегнетоэлектрическую фазу, что обеспечивает в результате релаксорный сегнетоэлектрик с электромеханической деформацией, большей, чем 7%, и плотностью упругой энергии, равной 0,7 Дж/см3 при 150 МВ/м. Дополнительно было описано, что посредством введения дефектов посредством высокоинтенсивного облучения электронами сополимеров P(VDF-TrFE), сополимер может быть также преобразован из «нормального» сегнетоэлектрического P(VDFTrFE) в сегнетоэлектрический релаксор.
Эти материалы могут быть образованы посредством синтеза полимеров, описанного в работе F. Carpi и др., "Dielectric Elastomers as Electromechanical Transducers: Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology," Oxford, Elsevier, 2011, стр. 53. Эта работа раскрывает комбинацию процесса суспензионной полимеризации и активируемого кислородом инициатора. Эти пленки могут быть образованы посредством наливания раствора на стеклянную подложку и затем испарения растворителя.
Необходимый наполнитель может быть добавлен в растворитель перед литьем пленки. После литья, композиционный материал может быть затем отожжен для удаления растворителя и увеличения степени кристалличности. Скорость кристаллизации может уменьшаться в зависимости от концентрации наполнителя и распределения частиц по размерам. Растяжение будет выравнивать молекулярные цепи и будет становиться более сложным, поскольку частицы могут прокалывать молекулярные цепи. Диэлектрическая проницаемость будет увеличиваться для большинства добавок, что будет уменьшать напряжение срабатывания, требуемое для достижения некоторой деформации. Жесткость материала будет увеличиваться, что будет уменьшать деформацию.
Процесс изготовления, таким образом, включает в себя образование раствора полимера, добавление частиц, смешивание, после чего следует литье (например, пленочное литье), потенциально, объединенное с ламинированием. Альтернативами являются нанесение покрытия методом центрифугирования, прессование и т.д.
Локальные изменения концентрации могут быть реализованы с использованием розлива с дозированием или трехмерной печати с растворителем. С использованием процессов трехмерной печати, возможны, например, толщины слоев между 10 и 20 мкм.
Во всех примерах, добавление наполнителя, в общем, оказывает влияние на напряжение пробоя. Максимальная деформация, которая может быть обеспечена с использованием электроактивного полимера, определяется максимальным напряжением, которое может быть приложено, которое является напряжением пробоя (или электрической прочностью диэлектрика).
Напряжение пробоя полимеров связано с диссоциацией молекул полимера под действием приложенного внешнего поля. Добавление частиц наполнителя в полимерную матрицу может оказывать значительное влияние на напряжение пробоя. В частности, большие частицы могут локально увеличивать поля. Таким образом, смешивание полимеров с частицами субмикронного диапазона оказывает меньшее отрицательное влияние на напряжение пробоя. Кроме того, структура границы раздела полимер - наполнитель может сильно влиять на напряжение пробоя.
Агломерация частиц является другим эффектом, который уменьшает напряжение пробоя. Однако, посредством модификации поверхностей частиц, предотвращающей агломерацию и улучшающей структуру границы раздела, может быть уменьшено негативное влияние на уровни напряжения пробоя. Однако полимеры с наполнителем будут иметь меньшую электрическую прочность диэлектрика, чем полимеры без наполнителя, что будет приводить к меньшей деформации срабатывания.
В заключение, для диэлектрических электроактивных полимеров, смешение с частицами может быть обеспечено с использованием большого множества промышленных технологий смешения и формования. Для сохранения ограниченного влияния на жесткость и, таким образом, на уменьшение величины перемещения исполнительного устройства, предпочтительны меньшие концентрации. Для данной объемной концентрации, не слишком малые частицы также предпочтительны для сохранения ограниченного влияния на жесткость. Мягкий базовый полимер может быть выбран для компенсации увеличения жесткости. Увеличенная диэлектрическую проницаемость может обеспечить возможность срабатывания при уменьшенных напряжениях. Для сохранения электрической прочности диэлектрика, размер и концентрация частиц должны быть ограничены, и могут быть предприняты меры для улучшения границы раздела полимер - наполнитель, а также диспергирования частиц. Локальные изменения концентрации могут быть обеспечены посредством печати шаблона частиц наполнителя.
Для электроактивных полимеров релаксорного типа смешение с частицами также возможно. Подобные тенденции в отношении влияния концентрации и размера частиц на жесткость и электрическую прочность диэлектрика сравнимы с эффектами, описанными выше. Частицы могут быть добавлены после полимеризации. Растворенные полимеры могут формоваться с использованием различных технологий, таких как пленочное литье и нанесение покрытия методом центрифугирования. Также возможны локальные изменения концентрации, например, с использованием подхода печати.
Источник света может согласно одному или более примерам содержать один или более твердотельных источников света, таких как LED или OLED. Альтернативно или дополнительно, источник света может содержать другие виды источников света, такие как источник свет на основе нити накаливания или люминесцентный источник света. Альтернативно или дополнительно, источник света может включать в себя один или более лазерных источников света.
Следует отметить, что в описанных вариантах осуществления настоящего изобретения управление состоянием срабатывания исполнительного элемента 12 подробно не описано. Управление исполнительным устройством на основе электроактивного полимера для обеспечения эффектов срабатывания является общеизвестным и может быть сразу понято специалистом в данной области техники. Таким образом, для краткости, управление деформацией исполнительного элемента посредством электрической стимуляции не описывается. Управление состоянием срабатывания исполнительного элемента может быть реализовано в конкретных примерах посредством отдельного выделенного контроллера. Альтернативно, единственный контроллер 30 может быть выполнен с возможностью обеспечивать управление этими обоими аспектами, но при этом, тем не менее, управление жесткостью является полностью независимым от управления состоянием срабатывания.
В конкретном примере, показанном на фиг. 3, светопоглощающие наполнительные элементы 20 однородно распределены по всему телу исполнительного элемента 12. В результате, однородный уровень нагрева обеспечивается в исполнительном элементе в ответ на стимуляцию световым выходом 26 (предполагается, что световой выход обеспечивает однородное распределение световой энергии по всему исполнительному элементу). Таким образом, в этом конкретном примере, изменения светового выхода 26 могут влиять на изменения уровня жесткости по всему исполнительному элементу.
Однако в дополнительных примерах, светопоглощающие наполнительные элементы 20 могут быть неоднородно распределены по всему телу исполнительного элемента 12. На фиг. 5 показан пример, который схематично показывает исполнительный элемент 12 согласно одному или более вариантам осуществления настоящего изобретения, имеющий наполнительные элементы 20, пространственно сгруппированные в локально сконцентрированные группы. Согласно этому примеру, после облучения исполнительного элемента 12 световым выходом 26, только локальные области, содержащие высокие концентрации частиц наполнителя (схематично указанные заштрихованными областями 36), стимулируются для увеличения температуры и, таким образом, уменьшения жесткости, в то время как промежуточные области (схематично указанные незаштрихованными областями 38) остаются относительно ненагретыми и имеют, таким образом, больший уровень жесткости.
Следовательно, неоднородный шаблон изменения жесткости обеспечивается по всему телу исполнительного элемента 12, причем локальные области становятся более мягкими и более гибкими, в то время как промежуточный области остаются жесткими. Неоднородное распределение частиц наполнителя, таким образом, обеспечивает возможность стимуляции неоднородного профиля жесткости по всему исполнительному элементу в ответ на облучение источником 26 света.
В дополнительных примерах, кластеры могут быть организованы по-другому или организованы таким образом, чтобы обеспечивать другой шаблон или профиль изменения жесткости.
Согласно одному или более примерам, частицы могут не распределяться по дискретным кластерам, как показано на фиг. 5, а вместо этого могут быть распределены непрерывно по всему исполнительному элементу, но при этом могут иметь шаблон пространственного распределения, который является неоднородным, т.е. содержит области с большими концентрациями и области с меньшими концентрациями.
Фиг. 6 показывает простое первое иллюстративное исполнительное устройство фиг. 3, реализованное внутри катетера 42, для обеспечения улучшенной функции управления для управляемого наконечника катетера. Катетер 42 содержит пару взаимно противоположных исполнительных элементов 46, 48, установленных вдоль противоположных стеновых секций полости наконечника катетера. Каждый из двух противоположных исполнительных элементов снабжен отдельным световодом 52, 54 для обеспечения оптической связи соответствующего исполнительного элемента с единственным источником 24 света, расположенным на проксимальном конце катетера. Световоды в конкретных примерах могут быть оптическими волокнами.
Следует отметить, что размеры в схематичной иллюстрации фиг. 6 приведены не в масштабе. Хотя показано, что световоды 52, 54 являются более короткими, чем исполнительные элементы 46, 48, в реальности световоды могут продолжаться по всей длине катетера до конечного проксимального конца. Дополнительно, показано, что источник 24 света пространственно отделен от проксимального конца катетера, однако на практике световод может быть механически (и оптически) связан с концом катетера, либо постоянно, либо с возможностью съема.
Применение катетера, показанное на фиг. 6, предназначено для решения задачи, которая в настоящее время относится к многонаправленному управлению наконечником катетера, при котором взаимно противоположные (противодействующие) исполнительные устройства, установленные в катетерах для обеспечения двунаправленного управления, препятствуют друг другу при эффектах срабатывания вследствие их остаточной жесткости, которая сохраняется даже тогда, когда они являются неактивными. В идеальном случае, механически активное одно из исполнительных устройств будет относительно жестким при срабатывании, для обеспечения усилия наибольшей величины, в то время как механически пассивное одно из двух исполнительных устройств может быть относительно гибким, для оказания минимально возможного сопротивления активному исполнительному устройству.
Соответственно, в варианте осуществления, показанном на фиг. 6, контроллер (не показан) выполнен с возможностью реализовывать режим взаимно-обратного управления, при котором два исполнительных элемента управляются таким образом, что они имеют противоположные уровни жесткости: всегда, когда один из двух исполнительных элементов 46, 48 управляется таким образом, что он имеет относительно высокую жесткость, другой из двух исполнительных элементов управляется таким образом, что он имеет относительно низкую жесткость (или даже минимальную жесткость). В частности, контроллер может быть выполнен с возможностью определять, какой из двух исполнительных элементов (при наличии) находится в активном состоянии срабатывания, и управлять этим исполнительным элементом таким образом, чтобы он имел относительно высокий уровень жесткости, и одновременно управлять другим из двух исполнительных элементов таким образом, чтобы он имел относительно низкий уровень жесткости.
Это показано на фиг. 6. Когда первый исполнительный элемент 46 находится в активном состоянии срабатывания, катетер 42 возбуждается таким образом, что он направляется в (левое) первое положение 58. В этом состоянии срабатывания, контроллер выполнен с возможностью управлять первым исполнительным элементом 46 таким образом, чтобы он был в состоянии с относительно высокой жесткостью, и управлять вторым исполнительным элементом 48 таким образом, чтобы он был в состоянии с относительно низкой жесткостью. Напротив, когда второй исполнительный элемент 48 находится в активном состоянии срабатывания, катетер 42 возбуждается таким образом, что он направляется в (правое) второе положение 60. В этом состоянии срабатывания, контроллер выполнен с возможностью управлять вторым исполнительным элементом 48 таким образом, чтобы он был в состоянии с относительно высокой жесткостью, и управлять первым исполнительным элементом 46 таким образом, чтобы он был в состоянии с относительно низкой жесткостью.
Отдельное управление двумя исполнительными элементами 46, 48 может быть обеспечено в примерах посредством обеспечения двух отдельных источников 24 света, а не единственного источника света, показанного на фиг. 6. Альтернативно, единственный источник света, показанный на фиг. 6, может быть выполнен с возможностью иметь независимо управляемые области светового выхода, одна из которых оптически связана с проксимальным концом первого световода 52, а другая оптически связана с проксимальным концом второго световода 54. Альтернативно, снова, независимое управление двумя исполнительными элементами может быть обеспечено посредством обеспечения исполнительных элементов 46, 48, каждый из которых содержит светопоглощающие наполнительные элементы, чувствительные к разным соответствующим диапазонам длин волн света. Таким образом, единственный источник 26 света может независимо управлять обоими исполнительными элементами 46, 48 посредством избирательного управления световым выходом 26 таким образом, чтобы он содержал только те длины волн света, к которым адресуемый исполнительный элемент является чувствительным.
Как отмечено выше, управляемая жесткость исполнительного элемента позволяет обеспечивать в иллюстративных вариантах осуществления более сложные и усовершенствованные перемещения и формы срабатывания. Одним конкретным применением, которое может получить преимущество от увеличенного диапазона деформационных действий, является навигация катетеров и проволочных проводников через узкие и извилистые (периферийные) кровеносные сосуды. Такая навигация требует усовершенствованной технологии управления, которая может быть труднодостижимой с использованием стандартных исполнительных устройств на основе EAP, имеющих фиксированный профиль жесткости. Наиболее эффективное управление обычно достигается посредством обеспечения локально гибких областей в исполнительном устройстве на основе EAP, расположенных вокруг управляемых точек вращения. Когда эти точки являются фиксированными, сложность и адаптируемость доступных управляемых движений являются ограниченными.
Примеры согласно по меньшей мере одному множеству вариантов осуществления, таким образом, обеспечивают удлиненный исполнительный элемент на основе EAP, имеющий множество «мягких пятен», расположенных в различных точках вдоль длины исполнительного элемента и содержащих локальные концентрации светопоглощающих наполнительных элементов, для обеспечения возможности настройки локального уровня жесткости. Наполнительные элементы, заполняющие каждое «мягкое пятно», выполнены с возможностью быть чувствительными к отличному диапазону длин волн, так что можно независимо управлять жесткостью каждого локального пятна.
На фиг. 7 показан пример, который показывает удлиненный исполнительный элемент 12, имеющий три локализованные области 70, 72, 74 светопоглощающих наполнительных элементов, каждая из которых содержит локальную концентрацию частиц наполнителя, выполненных с возможностью поглощать свет отличного диапазона частот (или длин волн). Как показано на верхнем изображении фиг. 7, каждая локализованная область 70, 72, 74 образует локально настраиваемое пятно или точку вдоль длины исполнительного элемента. После световой стимуляции, каждое пятно становится гибким и эффективно обеспечивает локальную точку вращения, вокруг которой исполнительный элемент 12 естественно изгибается после деформации материала на основе EAP. Посредством избирательной стимуляции одной или более локальных областей 70, 72, 74 с использованием конкретной частоты (или частот) света, к которой они являются чувствительными, может быть спонтанно сгенерировано соответствующее множество из одной или более локальных управляемых точек вращения. Таким образом, контроллер (не показан) выполнен с возможностью избирательно управлять конкретным режимом и формой обеспечиваемого управления исполнительным элементом.
Хотя конкретный пример фиг. 7 показывает множество, состоящее только из трех локальных «мягких пятен» 70, 72, 74, в дополнительных примерах может быть обеспечено большее число локальных концентраций частиц наполнителя; например, 10 или более, или даже 20 или более. Чем больше будет число кластеров частиц наполнителя, тем больше будет возможная степень управления профилем жесткости исполнительного элемента 12 и, таким образом, степень управления управляемой конфигурацией.
Варианты осуществления согласно вышеупомянутым примерам обеспечивают функциональность адаптивного управления без использования сложных геометрических конструкций из множественных элементов на основе EAP или использования сегментированных конструкций на основе EAP, которые все являются сложными в разработке и эксплуатации, а также более дорогими в изготовлении.
Согласно одному или более дополнительным вариантам осуществления, может быть обеспечен проволочный проводник для навигации в кровеносных сосудах и проникновения в окклюзии, содержащий один или более исполнительных элементов согласно настоящему изобретению. Исполнительные элементы могут быть предназначены для обеспечения настраиваемого управляемого действия наконечника проволочного проводника. Наконечник проволочного проводника может быть, в частности, управляемым для настройки разных состояний гибкости согласно конкретному режиму работы. Эти режимы могут включать в себя, например: режим прямой навигации, режим управляемой навигации, и режим проникновения в окклюзии.
Обычно, в процедурах удаления хронических полных окклюзий, например, разные проволочные проводники с разными жесткостями используются в разных частях процедуры удаления. Относительно гибкий проволочный проводник, имеющий жесткость среднего уровня, может быть обычно использован для быстрой и легкой навигации в главных кровеносных сосудах, относительно мягкий проволочный проводник может быть использован для маневрирования в малых и извилистых сосудах, и, наконец, жесткий проволочный проводник (наконечник) может быть использован для проникновения в окклюзии. Посредством обеспечения проволочного проводника, имеющего наконечник с настраиваемыми уровнями жесткости, можно избежать использования множественных разных проволочных проводников, что значительно улучшает эффективность и скорость операции удаления.
Это более ясно показано на фиг. 8, которая показывает иллюстративный проволочный проводник 43, имеющий управляемый наконечник, содержащий по меньшей мере один исполнительный элемент согласно варианту осуществления настоящего изобретения. Показана реализация проволочного проводника в трех разных режимах работы и управления.
В первом режиме (фиг. 8, слева), исполнительным элементом в наконечнике проволочного проводника управляют (посредством соответствующего управляемого источника света - не показанного на фиг. 8) таким образом, чтобы он демонстрировал низкий уровень жесткости, чтобы проволочный проводник мог быть проведен через относительно прямую секцию кровеносного сосуда 78.
Во втором режиме (фиг. 8, центр), исполнительным элементом в проволочном проводнике 43 управляют таким образом, чтобы он демонстрировал средний уровень жесткости для навигации через более извилистую секцию кровеносного сосуда 78. В этом режиме, наконечник проволочного проводника требуется направлять в одном или более направлениях (посредством электрической стимуляции исполнительного устройства на основе EAP). Таким образом, для обеспечения большего усилия срабатывания для облегчения управления предпочтительно относительно более жесткое состояние.
В третьем режиме (фиг. 8, справа), исполнительным элементом в проволочном проводнике 78 управляют таким образом, чтобы он демонстрировал относительно высокий уровень жесткости, для проникновения в локальную окклюзию (или стеноз) 82 в кровеносном сосуде 78.
Исполнительный элемент может легко изменять уровень жесткости между (по меньшей мере) тремя разными уровнями жесткости посредством, например, управления интенсивностью света, направляемого на исполнительный элемент соответствующим источником света (не показан на фиг. 8).
Фиг. 9 схематично показывает дополнительное иллюстративное исполнительное устройство согласно одному или более вариантам осуществления настоящего изобретения. Это устройство включает в себя исполнительный элемент 12, образованный из единственного листа материала на основе электроактивного полимера, имеющего множество локальных концентраций 86, 88, 90, 92 светопоглощающих наполнительных элементов с разными плотностями, расположенных во множестве разных местоположений по всему листу. Посредством изменения интенсивности и/или спектрального состава светового выхода, обеспечиваемого для исполнительного элемента 12 источником 24 света, разные характеристики локальной деформации могут быть обеспечены в различных местоположениях после электрической стимуляции материала на основе EAP. В частности, посредством избирательного управления соответствующей жесткостью разных локализованных областей, разные профили жесткости могут быть реализованы по всему исполнительному элементу 12, и, следовательно, после деформации исполнительного элемента могут быть обеспечены разные формы и эффекты изгиба и сжатия.
Согласно одному или более примерам, светопоглощающие наполнительные элементы двух или более разных локализованных областей могут быть выбраны таким образом, чтобы они были чувствительными к разным соответствующим диапазонам длин волн света. Таким образом, независимое избирательное управление разными локальными областями может быть обеспечено посредством единственного источника 24 света (посредством избирательного управления конкретными длинами волн света, содержащимися в световом выходе, генерируемом источником света).
Примеры согласно этому варианту осуществления могут быть использованы для создания матричных эффектов срабатывания без использования сложного структурирования EAP, массивов, или матричного управления. Это может быть потенциально полезным, например, в простых (тактильных) пользовательских интерфейсах и оптических устройствах.
Примеры согласно дополнительному множеству вариантов осуществления могут обеспечить исполнительный элемент, образованный из проколотого листа композиционного материала на основе EAP, имеющего проколотые отверстия (или поры), чей размер является управляемым в зависимости от интенсивности и/или спектрального состава применяемого светового стимула. Такой проколотый лист может, например, обеспечивать мембрану для обеспечения управляемой диффузии.
Например, лист исполнительного элемента может разграничивать множество отверстий, причем каждое отверстие окружено или находится в механической связи с областью материала на основе EAP, имеющего светопоглощающие наполнительные элементы, выполненные с возможностью быть чувствительными к свету конкретного множества из одной или более частот. Некоторые подмножества отверстий могут иметь наполнительные элементы, выполненные с возможностью быть чувствительными к общему множеству из одной или более частот. Каждое отверстие может быть альтернативно обеспечено наполнительными элементами, выполненными с возможностью быть чувствительными к уникальному множеству из одной или более частот.
Лист исполнительного элемента может быть выполнен таким образом, чтобы в отсутствие какого-либо электрического стимула, приложенного к EAP, все отверстия были открыты (или, альтернативно, все отверстия были закрыты). После стимуляции EAP электрическим стимулом, лист исполнительного элемента может быть выполнен с возможностью деформироваться таким образом, чтобы все отверстия переводились в закрытое (или открытое) состояние. Следует понимать, что посредством изменения жесткости областей листа исполнительного элемента, непосредственно окружающих конкретные множества из одного или более отверстий, упомянутыми отверстиями можно управлять таким образом, чтобы они реагировали по-разному либо на отсутствие, либо на приложение электрического стимула. Посредством оптической стимуляции некоторых отверстий (светом того спектрального состава, к которому они являются чувствительными), конкретными отверстиями можно управлять, например, таким образом, чтобы они открывались, когда остальные отверстия закрыты, или чтобы они закрывались (когда остальные отверстия открыты). Таким образом, можно независимо управлять отдельными отверстиями (множествами из одного или более отверстий).
Следовательно, посредством соответствующим образом объединенных электрических и оптических стимулов, может быть обеспечено заказное управление конкретным числом и шаблоном отверстий, которые открываются в любое время, а также, в конкретных примерах, управление размером каждого из открытых отверстий (например, посредством изменения интенсивности различных спектральных компонентов светового стимула).
Когда разные подмножества из одного или более отверстий имеют окружающие или смежные наполнительные элементы, чувствительные к разным длинам волн света, посредством управления спектральным составом применяемого светового стимула можно управлять конкретной конфигурацией отверстий, которые открыты, в любое время (т.е. посредством избирательного включения или исключения длин волн, которые, как известно, связаны с разными подмножествами).
Такой вариант осуществления может быть использован в качестве мембраны, обеспечивающей управляемую диффузию через ее поверхность, в частности, посредством избирательного управления открыванием или закрыванием большего или меньшего числа отверстий в любое время.
Согласно одному или более конкретным примерам, также можно управлять направлением диффузии. Это может быть обеспечено, например, посредством мембраны, имеющей поверхности или области поверхности, которые ориентированы в некотором диапазоне разных направлений. Эта мембрана может включать в себя криволинейную мембрану (либо замкнутую криволинейную поверхность, такую как сфера, либо незамкнутую криволинейную поверхность), или составную мембрану, имеющую множественные плоские поверхности, обращенные в разных направлениях. Посредством избирательного управления числом отверстий, открытых на каждой из по-разному обращенных поверхностей или секций поверхностей, можно управлять скоростью диффузии в каждом из разных направлений.
Согласно одному или более вариантам осуществления настоящего изобретения, может быть обеспечен исполнительный элемент, содержащий светопоглощающие наполнительные элементы, которые по меньшей мере частично состоят из материала, имеющего температурно-зависимый коэффициент оптического пропускания. В частности, коэффициент оптического пропускания может быть обеспечен или выбран таким образом, чтобы он стабилизировался или имел плато (переставал изменяться) после достижения конкретной температуры. Более конкретно, коэффициентом оптического пропускания можно управлять таким образом, чтобы он стабилизировался или имел плато (переставал изменяться) для температур выше температуры Tg стеклования материала на основе электроактивного полимера, содержащегося в исполнительном элементе.
Жесткость полимера резко падает вблизи температуры Tg стеклования. При этой температуре, становится очень трудно точно управлять жесткостью материала. Посредством включения частиц материала, имеющего коэффициент оптического пропускания, изменяющийся при некоторой температуре (например, при температуре плавления частиц или при температуре перехода из транс-формы в цис-форму для полиазосоединений (см. ниже)), может быть обеспечено стабильное управление жесткостью. В частности, при выборе материала, имеющего коэффициент оптического пропускания, который имеет плато (перестает изменяться) или стабилизируется выше упомянутой некоторой температуры, дальнейшее нагревание исполнительного элемента после превышения этой конкретной температуры становится все более трудным. В результате, температура исполнительного элемента стабилизируется, и, следовательно, может быть сохранено управление уровнем жесткости материала.
Этот эффект показан, в частности, для наполнителей на основе полиазосоединений, на фиг. 10, которая показывает график зависимости коэффициента оптического пропускания (по оси y в произвольных единицах) от температуры (по оси x в °С) для нескольких разных иллюстративных полимерных наполнительных материалов. Разные линии 100, 102, 104, 106 общего направления представляют разные азосоединения.
Некоторые из этих материалов демонстрируют свойство наличия плато, описанное выше, и, следовательно, могут быть особенно пригодными кандидатами для включения в качестве светопоглощающих наполнительных элементов в вариантах осуществления настоящего изобретения. В частности, материал 100 демонстрирует особенно резкий переход коэффициента оптического пропускания при температуре около 55°С, перед стабилизацией при температуре около 64°С. Таким образом, этот материал может быть особенно пригодным материалом-кандидатом. Материал 102 демонстрирует подобное, хотя и более слабое, свойство коэффициента пропускания, который увеличивается относительно непрерывно между 30°С и около 60°С, перед стабилизацией на уровне коэффициента пропускания, подобном уровню коэффициента пропускания материала 100.
Напротив, материал 104 демонстрирует резкий выброс коэффициента пропускания (приблизительно при 68°С), который характеризует материал 100, но не имеет плато при данной более высокой температуре, а имеет тенденцию роста. Этот материал, таким образом, может быть менее предпочтительным. Материал 104 может быть также менее предпочтительным, поскольку он демонстрирует приближенно однородный коэффициент оптического пропускания в диапазоне между 30°С и 75°С.
Согласно одному или более вариантам осуществления, дополнительное управление жесткостью исполнительного элемента на основе EAP может быть обеспечено посредством плавления светопоглощающих наполнительных элементов. Когда электроактивный полимер снабжен наполнительными элементами или частицами или волокнами, жесткость всего композиционного материала будет изменяться после плавления этих частиц (даже если жесткость самого материала на основе электроактивного полимера остается неизменной). Тогда это обеспечивает дополнительное средство для (по меньшей мере однородной) настройки уровня жесткости такого исполнительного элемента на основе электроактивного полимера. Дополнительно, если наполнительные элементы являются (полу-)кристаллическими, то спектры коэффициента оптического пропускания будут также изменяться при плавлении частиц. Температурно-зависимые оптические свойства, подобные свойствам, описанным в варианте осуществления, описанном выше, могут быть тогда также обеспечены согласно этим примерам.
Дополнительное иллюстративное исполнительное устройство согласно одному или более вариантам осуществления настоящего изобретения показано на фиг. 11. Это устройство содержит исполнительный элемент 12, имеющий пакетированное множество из трех планарных систем 110, 112, 114 светопоглощающих наполнительных элементов, причем каждая планарная система содержит наполнительные элементы, выполненные с возможностью поглощать свет отличного множества или диапазона длин волн. В частности, упомянутые три планарные системы частиц выбирают таким образом, чтобы они поглощали так называемые субтрактивные цвета (голубой, пурпурный, желтый), которые содержит типичный источник белого света. Упомянутые три планарные системы пакетированы вдоль оси, продолжающейся параллельно оптической оси светового выхода 26, направляемого на исполнительный элемент 12 источником 24 света.
Каждая из пакетированных систем наполнительных элементов выполнена с возможностью поглощать одну часть спектрального состава светового выхода 26 и пропускать остальные части. Таким образом, из света, направляемого на пакет планарных систем наполнительных элементов, последовательно «удаляются» разные длины волн света, когда он проходит через каждый из разных слоев. Эта система обеспечивает средство избирательного управления локальным уровнем жесткости исполнительного элемента в направлении, параллельном оптической оси падающего света (т.е. по толщине исполнительного элемента).
В примерах, светопоглощающие наполнительные элементы, заполняющие различные планарные системы, могут содержать разные красители или могут, например, содержать разные виды люминофоров.
Состав света может быть настроен согласно тому, какие слои требуется стимулировать. Например, источник света может содержать только голубой или желтый свет, чтобы средний слой не стимулировался.
Таким образом, избирательное нагревание двух или более локальных плоских областей, находящихся одна поверх другой, может быть обеспечено посредством освещения только одной стороны пакета.
Хотя в подробном описании, приведенном здесь выше, конструкция и работа устройств и систем согласно настоящему изобретению были описаны для EAP, настоящее изобретение может быть фактически использовано для устройств на основе других видов электроактивных материалов (electro-active material - EAM). Следовательно, если не указано иное, то материалы на основе EAP, упомянутые выше, могут быть заменены другими материалами на основе EAM. Такие другие материалы на основе EAM известны в данной области техники, и специалисты в данной области техники знают, где найти их и как их применять. Несколько вариантов будет описано здесь ниже.
EAM с полевым управлением могут быть органическими или неорганическими материалами и, в случае, когда они являются органическими, они могут быть одномолекулярными, олигомерными или полимерными материалами. Они являются, в общем, пьезоэлектриками и, возможно, сегнетоэлектриками и, таким образом, содержат спонтанную постоянную поляризацию (дипольный момент). Альтернативно, они являются электрострикционными и, таким образом, содержат поляризацию (дипольный момент) только при возбуждении, но не в отсутствие возбуждения. Альтернативно, они являются диэлектрическими релаксорными материалами. Такие полимеры включают в себя, но не ограничены этим, подклассы: пьезоэлектрических полимеров, сегнетоэлектрических полимеров, электрострикционных полимеров, релаксорных сегнетоэлектрических полимеров (таких как релаксорные полимеры на основе PVDF или полиуретаны), диэлектрических эластомеров, жидкокристаллических эластомеров. Другие примеры включают в себя электрострикционные графт-полимеры, электрострикционную бумагу, электреты, электро-вязкоупругие эластомеры и жидкокристаллические эластомеры.
Отсутствие спонтанной поляризации означает, что электрострикционные полимеры демонстрируют малые гистерезисные потери или не имеют никаких гистерезисных потерь на очень высоких частотах работы. Эти преимущества, однако, достигаются за счет температурной стабильности. Релаксоры лучше всего работают в ситуациях, когда температура может быть стабилизирована в диапазоне, приблизительно, 10°С. Это может показаться на первый взгляд сильным ограничением, но при условии, что электрострикторы имеют преимущество на высоких частотах и очень слабых управляющих полях, эти применения, как правило, имеют место в специализированных микро-исполнительных устройствах. Температурная стабилизация таких малых устройств является относительно простой и часто не является значительной проблемой в общем процессе конструирования и разработки.
Релаксорные сегнетоэлектрические материалы могут иметь константу электрострикции, которая достаточно велика для хорошего практического применения, т.е. они могут быть предпочтительными одновременно для функций восприятия и срабатывания. Релаксорные сегнетоэлектрические материалы не являются сегнетоэлектриками, когда к ним приложено нулевое возбуждающее поле (т.е. напряжение), но становятся сегнетоэлектриками при возбуждении. Следовательно, в отсутствие возбуждения в материале не существует электромеханической связи. Электромеханическая связь становится ненулевой, когда подается сигнал возбуждения, который может быть измерен посредством подачи высокочастотного сигнала с малой амплитудой поверх сигнала возбуждения, согласно процедурам, описанным выше. Кроме того, релаксорные сегнетоэлектрические материалы имеют преимущество вследствие уникальной комбинации большой электромеханической связи при ненулевом сигнале возбуждения и хороших характеристик срабатывания.
Наиболее часто используемыми примерами неорганических релаксорных сегнетоэлектрических материалов являются: ниобат свинца - магния (lead magnesium niobate - PMN), ниобат свинца - магния - титанат свинца (lead magnesium niobate-lead titanate - PMN-PT) и цирконат - титанат свинца - лантана (lead lanthanum zirconate titanate - PLZT). Но в данной области техники известны и другие неорганические релаксорные сегнетоэлектрические материалы.
Полимеры на основе релаксорных сегнетоэлектриков на основе PVDF демонстрируют спонтанную электрическую поляризацию, и они могут быть предварительно деформированы для улучшения характеристик в направлении деформации. Они могут быть любыми материалами, выбранными из группы материалов, приведенных ниже.
Поливинилиденфторид (Polyvinylidene fluoride - PVDF), поливинилиденфторид - трифторэтилен (Polyvinylidene fluoride - trifluoroethylene - PVDF-TrFE), поливинилиденфторид - трифторэтилен - хлорфторэтилен (Polyvinylidene fluoride - trifluoroethylene - chlorofluoroethylene - PVDF-TrFE-CFE), поливинилиденфторид - трифторэтилен - хлортрифторэтилен (Polyvinylidene fluoride - trifluoroethylene - chlorotrifluoroethylene - PVDF-TrFE-CTFE), поливинилиденфторид - гексафторпропилен (Polyvinylidene fluoride - hexafluoropropylene - PVDF - HFP), полиуретаны или их смеси.
EAM и EAP с токовым управлением содержат сопряженные полимеры, ионные полимерно-металлические композиционные материалы, ионные гели и полимерные гели.
Примерами EAP с ионным управлением являются сопряженные полимеры, полимерные композиционные материалы на основе углеродных нанотрубок (carbon nanotube - CNT) и ионные полимерно-металлические композиционные материалы (Ionic Polymer Metal Composites - IPMC).
Подкласс диэлектрических эластомеров включает в себя, но не ограничен этим:
акрилаты, полиуретаны, силоксаны.
Подкласс сопряженных полимеров включает в себя, но не ограничен этим:
полипиррол, поли-3,4-этилендиокситиофен, поли(п-фениленсульфид), полианилины.
Материалы, упомянутые выше, могут быть реализованы в виде чистых материалов или в виде материалов, суспендированных в матричных материалах. Матричные материалы могут содержать полимеры.
Для любой исполнительной конструкции, содержащей материал на основе EAM, могут быть обеспечены дополнительные пассивные слои, влияющие на поведение EAM-слоя в ответ на подаваемый сигнал возбуждения.
Исполнительная система или конструкция устройства на основе EAP может иметь один или более электродов для обеспечения управляющего сигнала или сигнала возбуждения по меньшей мере для части электроактивного материала. Предпочтительно, система содержит два электрода. EAP может быть расположен между двумя или более электродами. Это промежуточное расположение необходимо для исполнительной системы, которая содержит эластомерный диэлектрический материал, поскольку ее срабатывание происходит, среди прочего, вследствие сжимающего усилия, оказываемого электродами, притягивающимися друг к другу вследствие подачи сигнала возбуждения. Упомянутые два или более электродов могут быть также встроены в эластомерный диэлектрический материал. Электроды могут быть структурированными или неструктурированными.
Подложка может быть частью исполнительной системы. Она может быть прикреплена к набору из EAP и электродов между электродами или к одному из электродов снаружи.
Электроды могут быть растяжимыми, чтобы они следовали за деформацией слоя материала на основе EAM. Это особенно предпочтительно для материалов на основе EAP. Материалы, пригодные для электродов, также являются общеизвестными и могут быть, например, выбраны из группы, состоящей из тонких металлических пленок, таких как золотые, медные, или алюминиевые пленки, или органических проводников, таких как углеродная сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен)-поли(стиролсульфонат) (PEDOT:PSS). Также могут быть использованы металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (polyethylene terephthalate - PET), например, с использованием алюминиевого покрытия.
Некоторые системы могут иметь электродные слои на каждой стороне слоя электроактивного материала. Также можно обеспечить электродный слой только на одной стороне, например, с использованием встречно-гребенчатых электродов. Если электроды будут находиться только на одной стороне, то может быть образовано отражающее устройство, не нуждающееся в прозрачных электродах.
Материалы для разных слоев могут выбираться, например, с учетом модулей упругости (модулей Юнга) разных слоев.
Для адаптации электрических или механических свойств устройства могут быть использованы слои, дополнительные к слоям, описанным выше, например, дополнительные полимерные слои.
Другие изменения раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при применении на практике заявленного изобретения, на основе изучения чертежей, раскрытия, и прилагаемой формулы изобретения. В формуле изобретения, слово «содержащий» не исключает другие элементы или этапы, а форма единственного числа не исключает множественного числа. Тот факт, что некоторые меры перечислены во взаимно отличающихся зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может быть использована с преимуществом. Никакие ссылочные позиции не следует толковать как ограничение объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОПТИЧЕСКОГО ПУЧКА | 2017 |
|
RU2769092C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОПТИЧЕСКОГО ПУЧКА | 2017 |
|
RU2750110C2 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО И АКУСТИЧЕСКИЙ КОМПОНЕНТ ДЛЯ ИСПОЛЬЗОВАНИЯ В ТАКОМ УСТРОЙСТВЕ | 2017 |
|
RU2756022C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ НЕГО | 2017 |
|
RU2750855C2 |
| ИСПОЛНИТЕЛЬНОЕ И СЧИТЫВАЮЩЕЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2018 |
|
RU2753750C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО, ВКЛЮЧАЮЩЕЕ В СЕБЯ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА, И СПОСОБ ВОЗБУЖДЕНИЯ | 2018 |
|
RU2764083C2 |
| ДВУНАПРАВЛЕННЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2016 |
|
RU2711243C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ НЕГО | 2017 |
|
RU2754722C2 |
| УЛЬТРАЗВУКОВОЕ ПРЕОБРАЗУЮЩЕЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2018 |
|
RU2769757C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО МАТЕРИАЛА | 2018 |
|
RU2762347C2 |
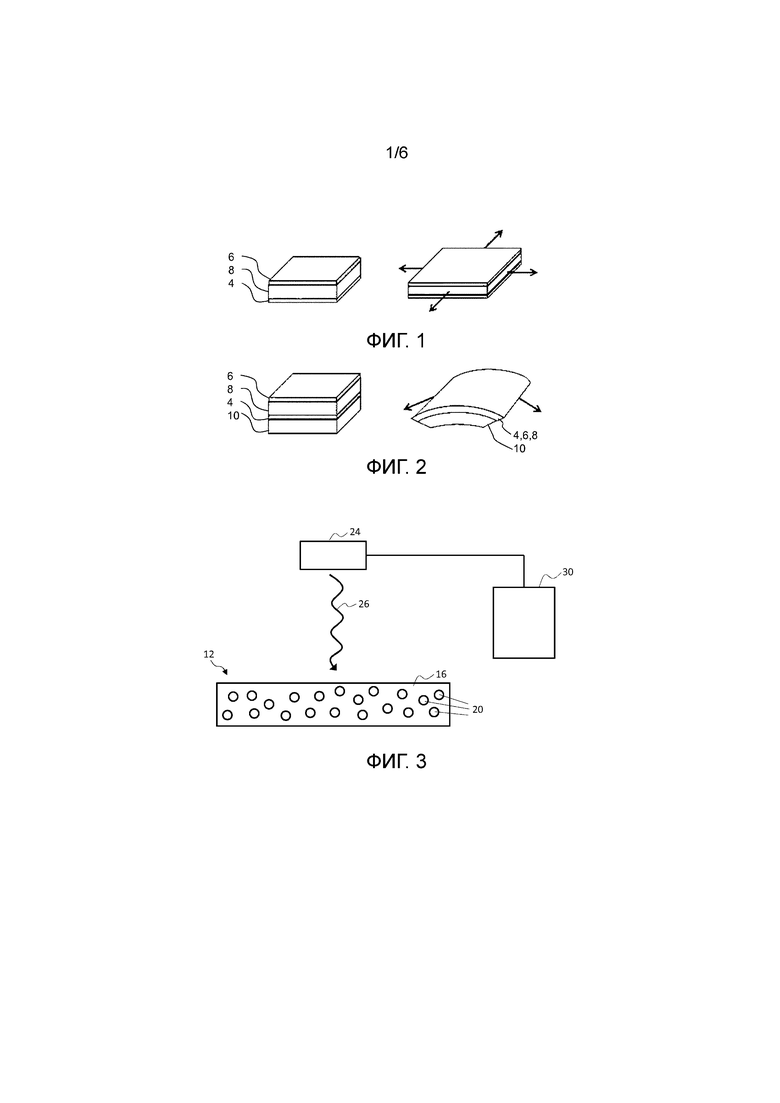
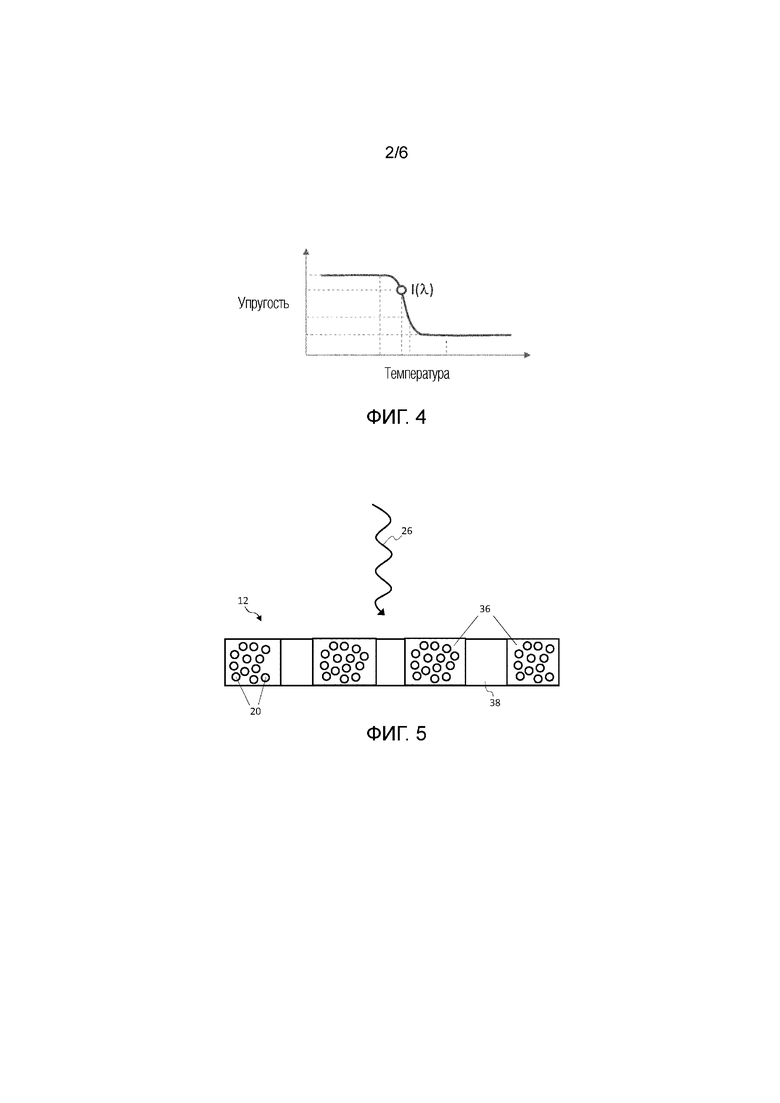
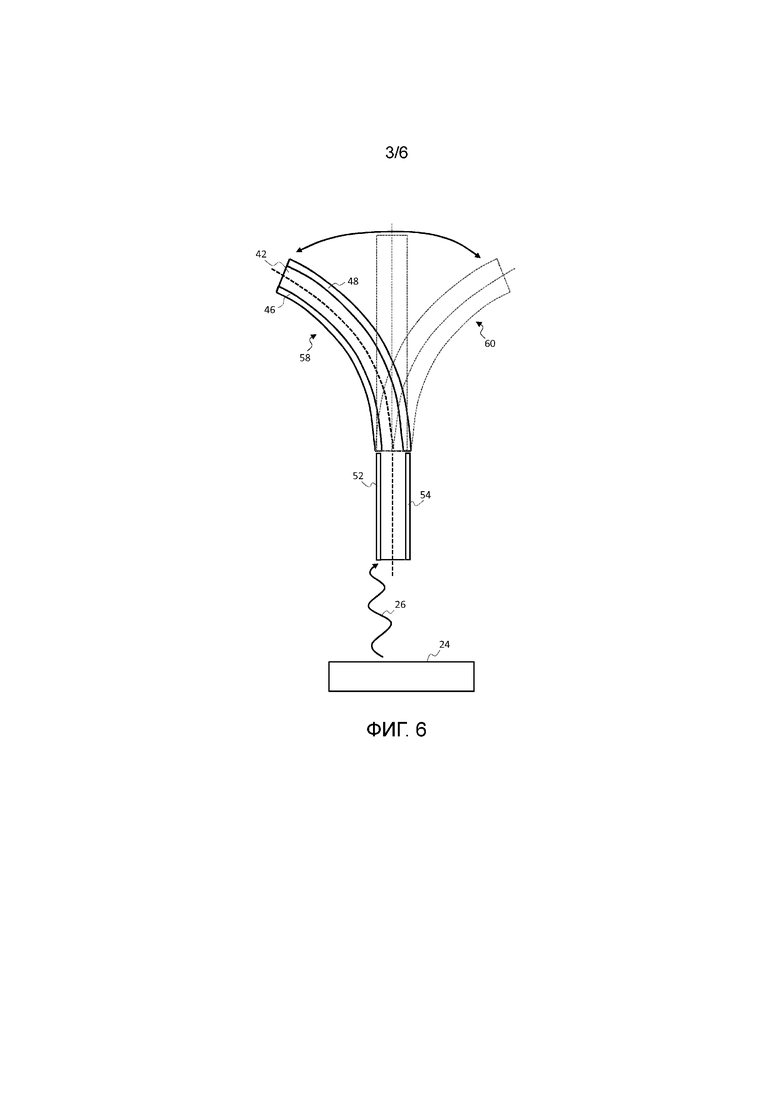
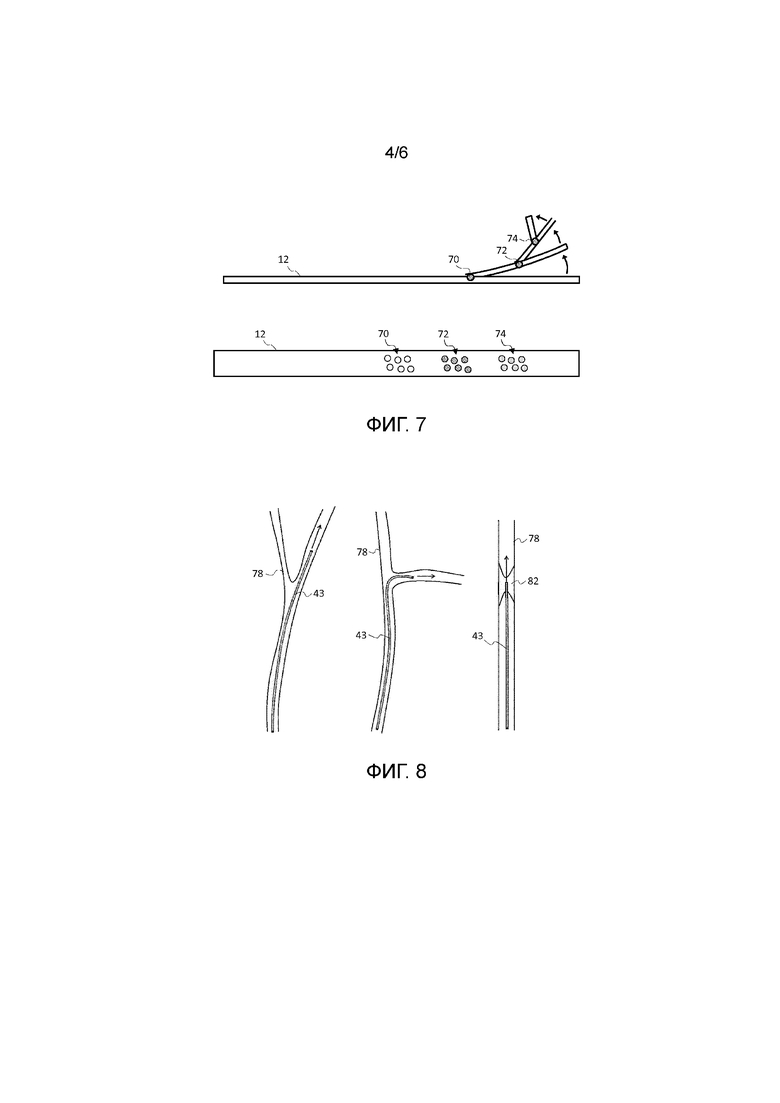
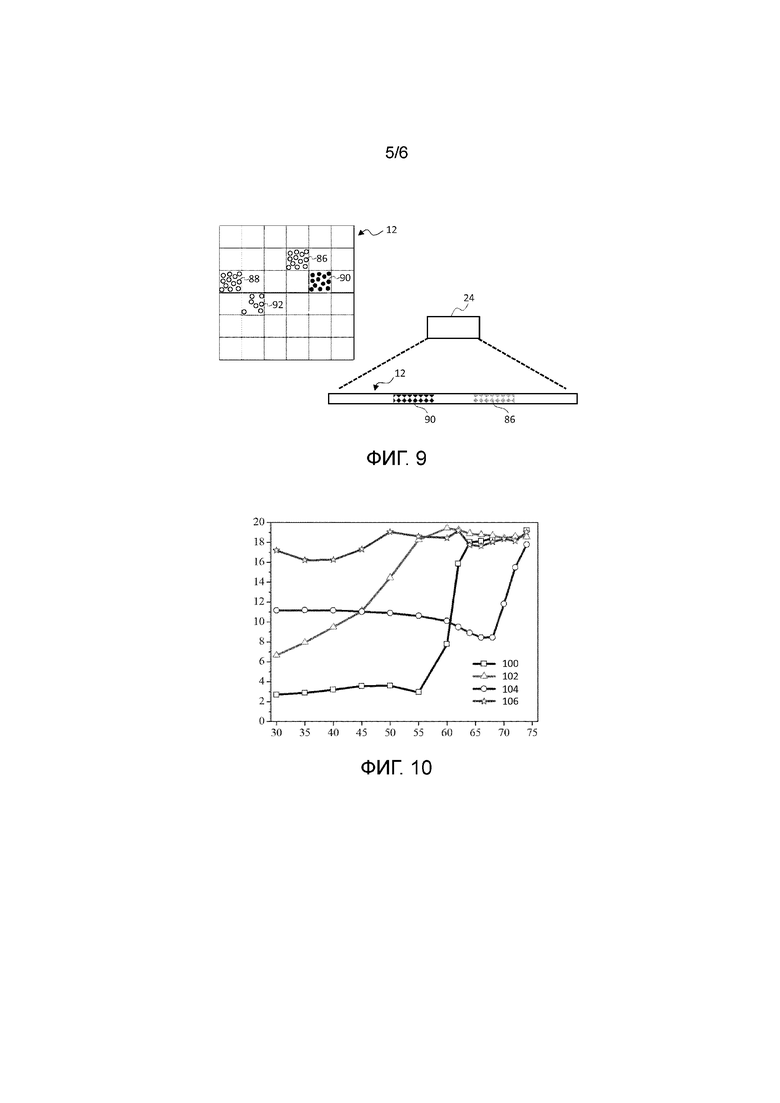
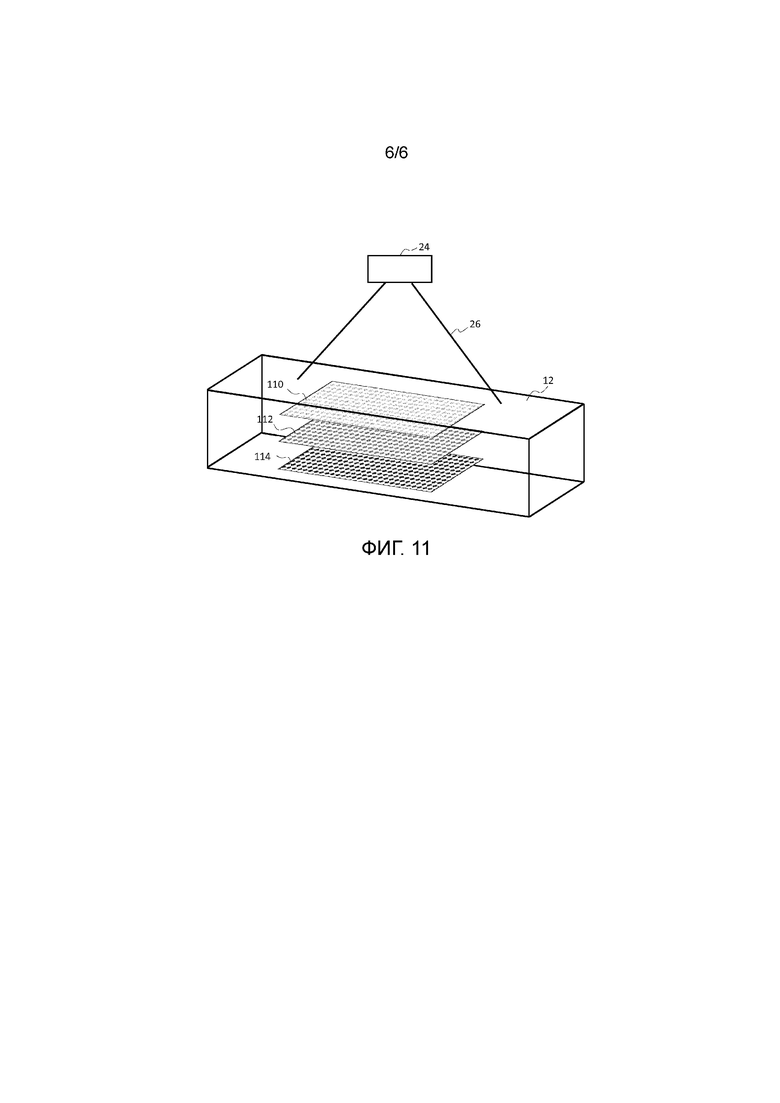
Изобретение относится к исполнительному устройству, имеющему управляемую жесткость. Исполнительный элемент (12) устройства содержит материал (16) на основе электроактивного полимера, имеющий светопоглощающие наполнительные элементы (20), встроенные в него. Наполнительные элементы выполнены с возможностью поглощать и преобразовывать падающий свет (26) в тепловую энергию, чтобы нагревать окружающие секции электроактивного материала. Посредством избирательного управления уровнем интенсивности или спектральным составом источника (24) света, направленного на исполнительный элемент, конкретная степень и распространение нагрева могут быть обеспечены по всему исполнительному элементу, в результате чего конкретный требуемый профиль жесткости или гибкости может быть реализован по всему исполнительному элементу. Исполнительное устройство обеспечивает улучшенную функцию срабатывания. 3 н. и 12 з.п. ф-лы, 11 ил.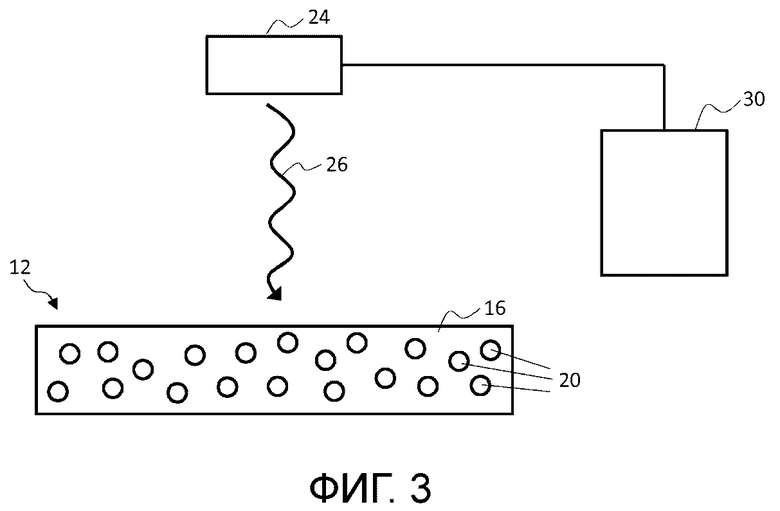
1. Исполнительное устройство, имеющее настраиваемый профиль жесткости, содержащее:
исполнительный элемент (12), содержащий:
электроактивный материал (16), выполненный с возможностью деформироваться в ответ на приложение электрического стимула; и
светопоглощающие наполнительные элементы (20) в электроактивном материале, выполненные с возможностью поглощать энергию падающего света и преобразовывать ее в тепловую энергию;
управляемый источник (24) света, оптически связанный с исполнительным элементом и выполненный с возможностью обеспечивать световой выход (26) для исполнительного элемента, причем световой выход является управляемым в диапазоне разных уровней интенсивности и/или спектральных составов для управляемой настройки профиля жесткости исполнительного элемента; и
контроллер (30), выполненный с возможностью управлять уровнем интенсивности и/или спектральным профилем светового выхода для избирательной реализации в исполнительном элементе любого профиля жесткости из диапазона, состоящего по меньшей мере из трех разных профилей жесткости.
2. Исполнительное устройство по п. 1, в котором контроллер (30) выполнен с возможностью управлять уровнем интенсивности и/или спектральным профилем светового выхода (26) для реализации в по меньшей мере части исполнительного элемента (12) любого уровня жесткости из непрерывного спектра уровней жесткости.
3. Исполнительное устройство по п. 1 или 2, в котором контроллер (30) выполнен с возможностью избирательно управлять профилем жесткости, реализуемым в исполнительном элементе (12), на основе предопределенного плана управления и/или на основе одного или более входных параметров управления.
4. Исполнительное устройство по любому предшествующему пункту, в котором светопоглощающие элементы (20) неоднородно распределены в электроактивном материале (16) для обеспечения возможности реализации пространственно неоднородных профилей жесткости в исполнительном элементе (12).
5. Исполнительное устройство по п. 4, в котором светопоглощающие наполнительные элементы (20) распределены в множестве пространственно дискретных концентраций (36) наполнительных элементов.
6. Исполнительное устройство по любому предшествующему пункту, в котором исполнительный элемент (12) содержит множество разных локально сконцентрированных групп светопоглощающих наполнительных элементов, причем каждая группа выполнена с возможностью поглощать свет отличного диапазона длин волн, и
причем контроллер выполнен с возможностью управлять спектральным составом светового выхода (26) согласно определенному плану управления для реализации конкретного профиля жесткости исполнительного элемента (12).
7. Исполнительное устройство по п. 6, в котором контроллер (30) выполнен с возможностью избирательно управлять локальной жесткостью исполнительного элемента (12) в одной или более областях исполнительного элемента посредством избирательного включения или исключения длин волн света, к которым чувствительны наполнительные элементы (20), включенные в упомянутые одну или более областей.
8. Исполнительное устройство по п. 6 или 7, содержащее пакетированную систему множественных разных планарных концентраций (110, 112, 114) наполнительных элементов, пакетированных вдоль оси, продолжающейся параллельно оптической оси светового выхода (26), и при этом каждая планарная концентрация выполнена с возможностью поглощать отличающуюся часть спектрального состава светового выхода.
9. Исполнительное устройство по любому предшествующему пункту, в котором управляемый источник (24) света и исполнительный элемент (12) оптически связаны посредством удлиненного световода (52, 54), и, необязательно, при этом упомянутый удлиненный световод является оптическим волокном.
10. Исполнительное устройство по любому предшествующему пункту, в котором светопоглощающие наполнительные элементы (20) содержат наполнительные элементы, образованные по меньшей мере из одного из:
черного пигмента;
переходного металла;
соответствующего конкретным длинам волн красителя;
люминофора; и
флуорофора.
11. Исполнительное устройство по любому предшествующему пункту, в котором светопоглощающие наполнительные элементы (20) содержат материал, имеющий такой температурно-зависимый коэффициент оптического пропускания, что коэффициент оптического пропускания перестает изменяться при конкретной температуре, и, необязательно, при этом коэффициент оптического пропускания перестает изменяться для температур выше температуры стеклования электроактивного материала (16).
12. Удлиненный зонд (42), имеющий управляемую секцию, причем удлиненный зонд содержит одно или более исполнительных устройств по любому предшествующему пункту для обеспечения управления упомянутой управляемой секцией.
13. Удлиненный зонд (42) по п. 12, содержащий пару противоположных исполнительных элементов (46, 48) для управления управляемой секцией, причем жесткость упомянутых двух исполнительных элементов взаимно-обратно управляется таким образом, чтобы после управления в любом данном направлении, механически активный один из упомянутых двух исполнительных элементов управлялся таким образом, чтобы он имел высокую жесткость для обеспечения большого активного усилия срабатывания, и механически пассивный один из упомянутых двух исполнительных элементов управлялся таким образом, чтобы он имел низкую жесткость для обеспечения минимального сопротивления усилию срабатывания.
14. Удлиненный зонд (42) по п. 12 или 13, содержащий выделенный световод (52, 54) для каждого исполнительного элемента (46, 48) для обеспечения отдельно управляемого светового выхода для каждого исполнительного элемента.
15. Способ избирательного управления профилем жесткости исполнительного элемента (12), причем исполнительный элемент содержит:
электроактивный материал (16), выполненный с возможностью деформироваться в ответ на приложение электрического стимула, и
светопоглощающие наполнительные элементы (20) в электроактивном материале, выполненные с возможностью поглощать энергию падающего света и преобразовывать ее в тепловую энергию,
причем упомянутый способ содержит этапы, на которых:
направляют световой выход (26) на исполнительный элемент, причем световой выход имеет управляемый уровень интенсивности и/или спектральный состав; и
управляют уровнем интенсивности и/или спектральным профилем светового выхода для избирательной реализации в исполнительном элементе (12) любого профиля жесткости из диапазона, состоящего по меньшей мере из трех разных профилей жесткости.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 6882086 B2, 19.04.2005. | |||

