ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к приводным/сенсорным устройствам, в которых применяются электроактивные материалы для приведения в действие и восприятия.
УРОВЕНЬ ТЕХНИКИ
Электроактивные материалы (ЭАМ) представляют собой класс материалов в области реагирующих на электричество материалов. При реализации в устройстве приведения в действие, подвергание ЭАМ действию электрического сигнала возбуждения может заставить их изменять размер и/или форму. Этот эффект может быть использован для целей приведения в действие и восприятия. Существуют неорганические и органические ЭАМ. Специальным типом органических ЭАМ являются электроактивные полимеры (ЭАП). Электроактивные полимеры (ЭАП) представляют собой развивающийся класс реагирующих на электричество материалов. Подобно ЭАМ, ЭАП могут действовать как датчики или приводы, но могут быть проще изготовлены с многообразными формами, обеспечивая возможность легкого встраивания в большое разнообразие систем. Другие преимущества ЭАП включают низкую мощность, небольшой форм-фактор, гибкость, бесшумную работу и точность, возможность высокого разрешения, высокие быстродействия и циклическое приведение в действие. ЭАП-устройство может быть использовано в любом применении, в котором желательна небольшая степень перемещения детали или изменения характеристики, на основе электрического активирования (приведения в действие). Подобным образом, технология может быть использована для восприятия небольших перемещений. Применение ЭАП обеспечивает возможность таких функций, которые ранее были невозможны, или предлагает большое преимущество перед обычными техническими решениями датчиков/приводов, благодаря сочетанию относительно большой деформации и усилия в небольшом объеме или тонком форм-факторе по сравнению с обычными приводами. Кроме того, ЭАП обеспечивают бесшумную работу, точное электронное управление, высокое быстродействие и широкий диапазон возможных частот приведения в действие, таких как 0-20 кГц.
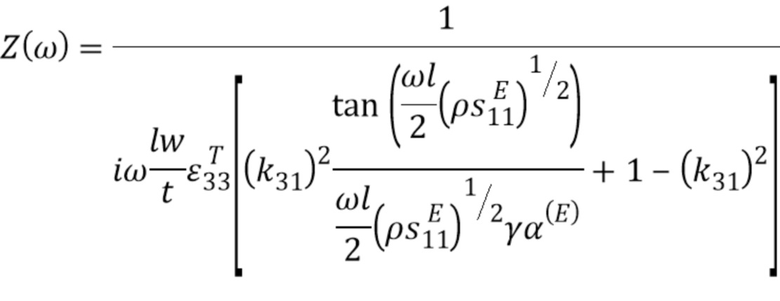
В качестве одного примера того, как может быть сконструировано и как может действовать ЭАМ-устройство, Фигуры 1 и 2 показывают два возможных режима работы ЭАП-устройства, которое включает слой 14 электроактивного полимера, размещенный между электродами 10, 12 на противолежащих сторонах слоя 14 электроактивного полимера. Фигура 1 показывает устройство, которое не закреплено на несущем слое. Чтобы вызвать расширение слоя электроактивного полимера по всем направлениям, как показано, используется напряжение. Фигура 2 показывает устройство, которое сконструировано так, что расширение возникает только в одном направлении. Для этой цели конструкция по Фигуре 1 является закрепленной на или присоединенной к несущему слою 16. Чтобы вызвать изгибание или искривление слоя электроактивного полимера используется напряжение. Природа этого движения возникает из взаимодействия между активным слоем, который расширяется при приведении в действие, и пассивным несущим слоем, который не расширяется.
Для определенных классов ЭАП приложение небольшого усилия (механической нагрузки) к устройству генерирует в ответ электрический сигнал. Это позволяет использовать единственную ЭАП-конструкцию как для приведения в действие, так и для восприятия. Однако приводы/датчики на основе ЭАП согласно уровня техники обычно обеспечены функциями восприятия и приведения в действие, которые отделены друг от друга либо физически, причем для восприятия используется иная область или часть устройства, нежели для приведения в действие, например, с отдельно обеспеченным электрическим соединением с каждой из них, либо во времени, причем работа единственного устройства последовательно чередуется между функциями восприятия и приведения в действие.
Например, US 2014/0139329 раскрывает ЭАП-систему, включающую цепь восприятия, цепь привода (приведения в действие) и цепь переключения. Цепь восприятия приспособлена для детектирования сигнала от ЭАП, когда он деформируется. Только после этого цепь переключения затем активирует цепь привода так, что она может создавать воздействующий сигнал (на приведение в действие) на основе входного измерительного сигнала. Таким образом, восприятие и приведение в действие разделены между собой во времени: восприятие и приведение в действие происходят последовательно, следуя одно за другим.
Существует потребность в устройстве и режиме работы, в котором сенсорная функциональность оптимизирована для обеспечения высокой сенсорной чувствительности, способной предоставлять значительно улучшенную достоверность и/или точность при измерении приложенных нагрузок.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель изобретения состоит в по меньшей мере частичном удовлетворении вышеуказанной потребности. Эта цель достигается с помощью изобретения, которое охарактеризовано независимыми пунктами формулы изобретения. Зависимые пункты формулы изобретения представляют предпочтительные варианты осуществления.
Согласно изобретению, представлено устройство, способное приводить в действие и воспринимать одновременно. Привод может представлять собой преобразователь. Устройство может быть приводом и/или датчиком, или преобразовательным устройством.
Согласно изобретению, также представлен способ одновременного восприятия и приведения в действие с использованием привода. Далее признаки, описываемые для устройства, могут быть распространены на признаки или этапы способа, и, наоборот, если не указано иное. Перенесенные признаки по меньшей мере имеют такие же преимущества, как описываемые для исходных признаков.
В изобретении первый управляющий сигнал предназначен для использования при приведении в действие устройства, а второй электрический управляющий сигнал предназначен для использования при восприятии с помощью устройства. Тем самым устройство управляется с использованием управляющего сигнала, который в сущности состоит из воздействующего сигнала и измерительного сигнала.
Привод благодаря электроактивному материалу реагирует на электрическое поле или усилие, создаваемое таким полем. Поэтому по меньшей мере измерительный сигнал представляет собой электрический сигнал, так что из этого электрического измерительного сигнала может определяться механический резонанс привода.
Первый управляющий сигнал может быть управляющим сигналом любого типа, при условии, что он пригоден для инициирования приведения в действие. Таким образом, первый управляющий сигнал может представлять собой оптический управляющий сигнал. В этом случае электроактивный материал также должен реагировать на подачу оптических сигналов с помощью деформации. Квалифицированному специалисту в данной области техники будет известно, где найти такие материалы в области техники. В таком случае компоновка устройства может включать блоки для направления оптических сигналов на первую часть материала. Такие блоки могут включать зеркала, линзы, оптические волокна и т.д. Удобно использовать характеристику электроактивности привода, применяемого для восприятия, также для приведения в действие привода. В последнем случае воздействующий сигнал должен быть электрическим сигналом приведения в действие, и устройство и/или электроактивная структура может включать один или более электродных узлов для подачи такого воздействующего управляющего сигнала.
Воздействующий сигнал (на приведение в действие) и измерительный сигнал, когда оба являются электрическими, могут быть выданы отдельно на один или более электродных узлов, но также могут быть наложены с образованием комбинированного управляющего сигнала перед выдачей комбинированного управляющего сигнала на один или более электродных узлов. Предпочтительно имеется только один и тот же электродный узел для выдачи на него воздействующего и измерительного сигнала.
Устройство и способ согласно изобретению делают возможным следующий эффект. Когда измерительный сигнал подается с частотой, соответствующей частоте механического резонанса ЭАМ-структуры, или одной из его гармоник, в структуре устанавливается механическая стоячая волна, которая, в свою очередь, влияет на электрические характеристики структуры. В частности, импеданс (полное сопротивление) структуры ниже для измерительного сигнала (и тем самым для этой части управляющего сигнала), соответствующего резонансной частоте, благодаря механической вибрации, совпадающей по фазе с измерительным сигналом. Напротив, импеданс материала выше для измерительного сигнала, соответствующего антирезонансной частоте материала, вследствие механической вибрации, не совпадающей по фазе с измерительным сигналом. Как представляется, при таких частотах восприятие является исключительно эффективным, в то же время оно не мешает долговременно одновременному приведению в действие.
Любая механическая нагрузка, например, такая как давление, приложенная к электроактивной структуре, может обусловливать демпфирование (затухание) в структуре, вызывая сдвиг ее резонансной частоты (и антирезонансной частоты) от ее исходных неподавленных значений, создавая тем самым несоразмерность между высокочастотным измерительным сигналом и основной частотой механической вибрации (или антирезонансным эквивалентом в случае антирезонансного соответствия). Все изменения характеристик резонансной структуры электроактивного материала, вызванные изменением сдвига резонансной частоты, могут быть благоприятным образом использованы для детектирования механической нагрузки с повышенной чувствительностью. Таким образом, сдвиг резонансной частоты может быть детектирован и/или определен. Детектирование и/или определение импеданса может быть выполнено с пользой, как будет разъяснено здесь ниже. Вышеизложенное остается в силе для всех устройств на основе ЭАМ, которые предназначены как для приведения в действие, так и для восприятия. Тем самым изобретение также может быть использовано в устройстве, которое описано в US 2014/0139329. Изобретение также может быть применено с использованием устройства, в котором структура электроактивного материала включает первую часть для приведения в действие и вторую часть для восприятия, причем вторая часть отличается от первой части, и причем управляющий сигнал подается на структуру электроактивного материала так, что воздействующий сигнал подается на первую часть, а измерительный сигнал подается на вторую часть.
В изобретении комбинирование воздействующего сигнала с измерительным сигналом может содержать или состоит из, по меньшей мере частично, наложения воздействующего сигнала на измерительный сигнал во времени. Управляющая система, действующая этим путем, может придавать устройству одновременно способность к приведению в действие (благодаря части с воздействующим сигналом) и к восприятию (благодаря части с измерительным сигналом). Это придает устройству способность к восприятию во время приведения в действие. Как описывалось здесь ранее, US 2014/0139329 описывает только последовательные восприятие и приведение в действие, подразумевая, что приведение в действие должно быть прекращено перед тем, как начинается восприятие.
Особенно в связи с признаком предыдущего абзаца, управляющий сигнал предпочтительно выдается на одну и ту же часть структуры активного материала, вместо ситуации, в которой управляющий сигнал подается на структуру электроактивного материала так, что воздействующий сигнал подается на первую часть, а измерительный сигнал подается на вторую часть, и вторая часть отличается от первой части. Хотя последнее обеспечивает одновременные приведение в действие и восприятие, точно так же, как в первом случае, это производится в пространственно различных местах (различных в пространственном отношении зонах активной структуры электроактивного материала), тогда как для последней ситуации это может быть в одном и том же положении (единственной активной зоне ЭАМ-структуры). Первая ситуация будет более благоприятной, так как восприятие в этом случае может быть тем самым более точным, и устройство может быть меньше и/или менее сложным, поскольку только одна часть требуется для приема и исполнения управляющего сигнала.
US 2002/0130673 упоминает о возможности достижения комбинированного восприятия и приведения в действие в одной и той же активной области полимера путем наложения низкоамплитудного высокочастотного измерительного сигнала переменного тока (AC) поверх первичного сигнала возбуждения (приведения в действие). Однако настоящий вариант изобретения представляет оптимизацию устройства и способа для достижения высокой чувствительности восприятия, которая могла бы надежно содействовать точному измерению в режиме реального времени величины прилагаемых механических нагрузок.
Наложением низкоамплитудного высокочастотного измерительного сигнала поверх высокоамплитудного первичного воздействующего сигнала могут быть одновременно достигнуты функции восприятия и приведения в действие. Амплитуда измерительного сигнала может быть значительно меньше амплитуды воздействующего сигнала, составляя, например, <10%, <5% или даже <1% от амплитуды воздействующего сигнала. Тем самым деформационный отклик в приводе, обусловленный измерительным сигналом, может быть пренебрежимо мал по сравнению с откликом, стимулированным воздействующим сигналом. Поэтому точность, достоверность и стабильность устройства в качестве привода не ухудшается.
Первый управляющий сигнал может иметь частоту, которая меньше частоты измерительного сигнала. Например, уровень сигнала первого управляющего сигнала может быть по существу постоянным (DC-сигнал) в пределах периода времени, в течение которого периодически изменяется измерительный сигнал. В альтернативном варианте, частота привода (приведения в действие) может быть в 2 или в 5, или в 10, или в 20, или в 50, или в 100, или более чем в 100 раз ниже, чем частота восприятия.
Если оба сигнала представляют собой переменные сигналы, каждый из воздействующего сигнала и измерительного сигнала имеет амплитуду. Оба сигнала могут быть выданы в диапазоне амплитуд, то есть они могут быть выданы как сигналы с переменной амплитудой. Диапазон амплитуд может иметь максимальную амплитуду. Если оба сигнала являются электрическими сигналами, (воздействующий сигнал) может быть переменным сигналом, имеющим DC-сигнал (хотя с DC-уровнем, который изменяется в зависимости от желательного приведения в действие), или может иметь переменную амплитуду (AC-сигнал). В последнем случае максимальная амплитуда (пиковая амплитуда) измерительного сигнала может составлять <10%, <5% или даже <1% пиковой амплитуды воздействующего сигнала. Частота воздействующего сигнала в последнем случае также может быть значительно меньше частоты измерительного сигнала, например, меньше по меньшей мере на два порядка величины, чтобы избежать взаимного влияния воздействующего сигнала и измерительного сигнала.
В случае, когда измерительный сигнал подается с частотой, соответствующей (недемпфированной) антирезонансной частоте, например, внезапное рассогласование, вызванное приложенной нагрузкой, затем может быть детектировано в виде обусловленного этим падения импеданса, измеренное в пределах ЭАМ-структуры. В альтернативном варианте, в случае, когда измерительный сигнал подается в соответствии с (недемпфированной) резонансной частотой, рассогласование может быть детектировано в виде обусловленного этим скачка импеданса, измеренного в пределах ЭАМ-структуры. В любом случае измерительный сигнал таким образом и в отличии от ситуации по существу вне резонанса или антирезонанса обеспечивает восприятие с повышенной чувствительностью.
Для измерения параметров измерительного сигнала устройство может дополнительно содержать чувствительный элемент в электрическом соединении с приводом. Такие параметры предпочтительно позволяли бы определять импеданс структуры электроактивного полимера в по меньшей мере один момент времени или даже для многих моментов времени так, что параметры измеряются во времени, и тем самым импеданс может быть определен во времени. Параметры обычно включают изменение напряжения во времени и тока во времени, чтобы оценивать сдвиги по фазе между обоими. Чувствительный элемент может контролировать импеданс (определяемый по измеренным параметрам) во времени, обеспечивая тем самым детектирование или определение изменений импеданса, которые могут быть использованы, например, для указания на приложение механической нагрузки к структуре. В определенных примерах чувствительный элемент может быть приспособлен для измерения, например, последовательного сопротивления в пределах устройства. Элемент может содержать один или более элементов цепи, предназначенных для определения импеданса, или может содержать, например, один или более IC-кристаллов, приспособленных для этой цели. Чувствительный элемент может содержать, например, часть элемента или блока для более широкого анализа. Как чувствительный элемент, так и механизм-драйвер, например, могут составлять часть узла или блока для более широкой обработки. В альтернативном варианте чувствительный элемент может быть составлен механизмом возбуждения.
Дополнительно чувствительный элемент может быть приспособлен для определения величины механической нагрузки, приложенной к устройству в любое заданное время, на основе определенного импеданса полимерной структуры в упомянутое заданное время. Поэтому изменения импеданса могут быть использованы не только для указания на то, что была приложена нагрузка, но также на величину этой нагрузки или для указания этой величины. Это может быть достигнуто выполнением этапа начальной калибровки перед применением устройства. Например, импеданс в пределах устройства может измеряться даже по мере возрастания величин усилия/нагрузки, прилагаемых к устройству, в то же время с сохранением неизменными двух управляющих сигналов. Затем это может предоставить контрольный график или набор контрольных значений, с помощью которых конкретные измеренные в устройстве импедансы, когда оно используется, могут быть связаны с конкретными величинами приложенного усилия. В некоторых примерах может быть выполнено множество калибровочных измерений, соответствующих различным состояниям привода (и различным соответствующим воздействующим сигналам).
Структура электроактивного полимера может содержать релаксорный ферроэлектрический материал. Релаксорный ферроэлектрический материал может содержать или состоять из неорганического релаксорного ферроэлектрического материала, органического релаксорного ферроэлектрического материала или композитного материала, включающего один или более из: неорганического релаксорного ферроэлектрического материала и органического релаксорного ферроэлектрического материала. Композит может содержать матричный материал, который сам является или не является электроактивным материалом. Релаксорные ферроэлектрики не являются ферроэлектрическими в отсутствие приложенного напряжения, что означает отсутствие электромеханической связи, когда не подается сигнал возбуждения. Когда подается, например, сигнал возбуждения, электромеханическая связь может становиться ненулевой. Релаксорные ферроэлектрики обеспечивают деформацию при приведении в действие с более высокими величинами (то есть они обладают высокие коэффициенты электрострикции) и более высокую чувствительность восприятия по сравнению с другими известными электроактивными материалами. Однако устройство не ограничивается применением релаксорных ферроэлектриков, и также могут быть использованы, например, пьезоэлектрические материалы.
Устройство может содержать множество приводов, каждый из которых имеет различную резонансную частоту. Например, каждый из этого множества может иметь различные размер и/или форму, и/или геометрию, обеспечивая тем самым различную резонансную частоту. Множество структур может быть размещено с образованием, например, структурированного узла или массива. Различные резонансные частоты могут быть детектированы по измеренным сигналам импеданса, и, например, это используется для определения, к какой ЭАМ-структуре в массиве или узле конкретно прилагается любая нагрузка. Поэтому может быть определяемым более точное определение положения прилагаемого давления.
Изобретение также представляет способ одновременного восприятия и приведения в действие. Способ может включать определение импеданса структуры электроактивного полимера во времени, и на основе указанного импеданса дополнительное определение величины любой механической нагрузки, приложенной к структуре на протяжении указанного времени. Например, импеданс может быть определен измерением одного или более электрических параметров сигнала возбуждения. Например, могут контролироваться ток и напряжение сигнала возбуждения во времени, и этим достигается измерение импеданса.
Согласно одному или более вариантам осуществления, способ может дополнительно включать переключение амплитуды или уровня сигнала первого управляющего сигнала между одним или более постоянными значениями, или переключение максимальной амплитуды первой составляющей сигнала между одним или более постоянными значениями, чтобы тем самым реализовать одно или более связанных с этим состояний приведения в действие привода. Степень деформации, вызванная в структуре, связана с величиной приложенного к ней напряжения. Различные состояния приведения в действие, соответствующие различным степеням деформации, могут быть реализованы при изменении первого управляющего сигнала. Это изменение может включать переключение максимальной амплитуды управляющего сигнала между рядом дискретных заданных значений, или, например, может включать чередование значения по непрерывному спектру значений.
В некоторых случаях способ может дополнительно включать этап калибровки для определения резонансной частоты привода и/или этап калибровки для определения калибровочной нагрузки привода. Определение и возможное хранение определенных значений таких калибровок может быть использовано для улучшения точности определения механических нагрузок на устройство без необходимости заблаговременно знать частоты механического резонанса привода.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь примеры изобретения будут описаны подробно со ссылкой на сопроводительные чертежи, на которых:
Фигура 1 показывает известное устройство на основе электроактивного полимера, которое не закреплено;
Фигура 2 показывает известное устройство на основе электроактивного полимера, которое поддерживается опорным слоем;
Фигура 3 изображает первую примерную конфигурацию для примерного приводного и сенсорного устройства;
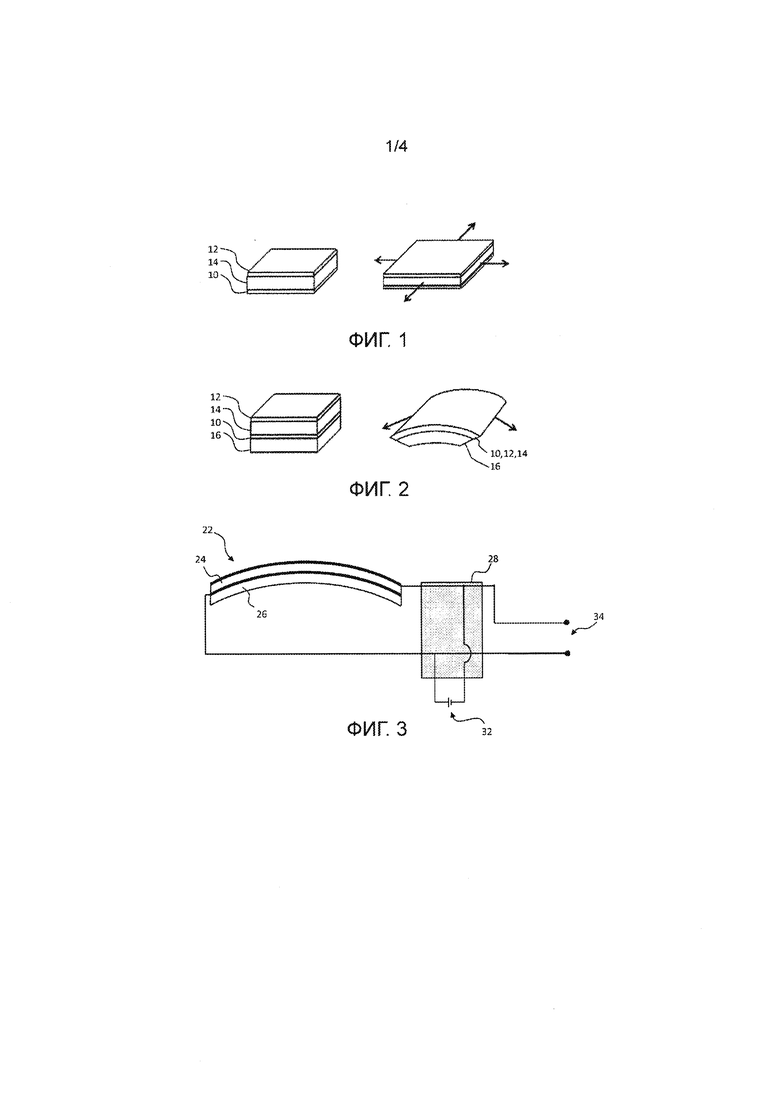
Фигура 4 изображает вторую примерную конфигурацию для примерного приводного и сенсорного устройства;
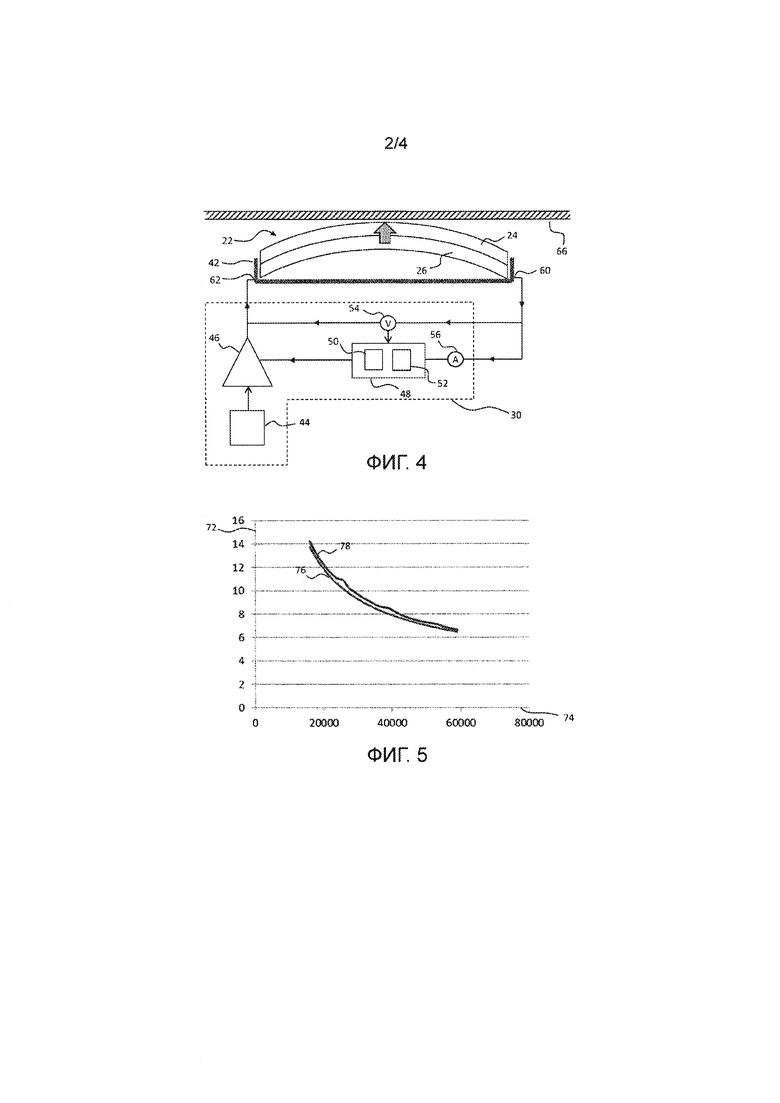
Фигура 5 показывает график, иллюстрирующий последовательное сопротивление (примерного ЭАП-привода) в зависимости от частоты сенсорного сигнала для двух различных фиксированных напряжений приведения в действие;
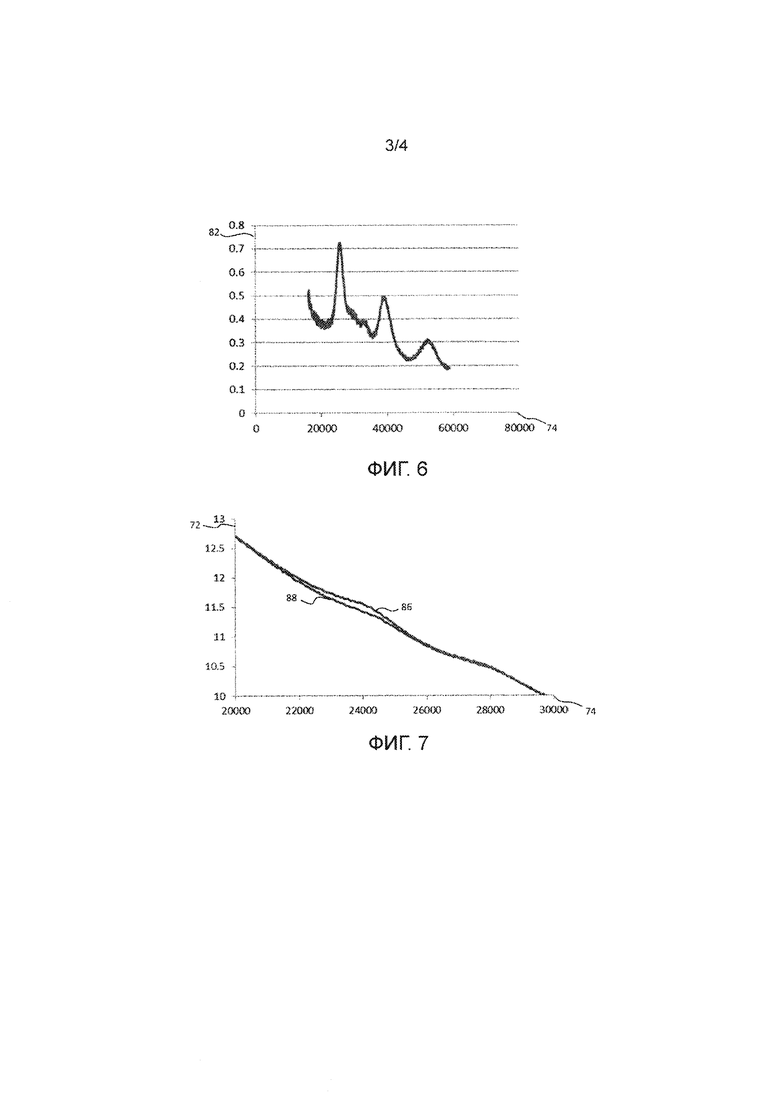
Фигура 6 показывает график, иллюстрирующий разницу между двумя кривыми сигнала по фигуре 5;
Фигура 7 показывает график, иллюстрирующий влияние усилия приложенной нагрузки на измеренные значения сопротивления в пределах диапазона частот сенсорного сигнала;
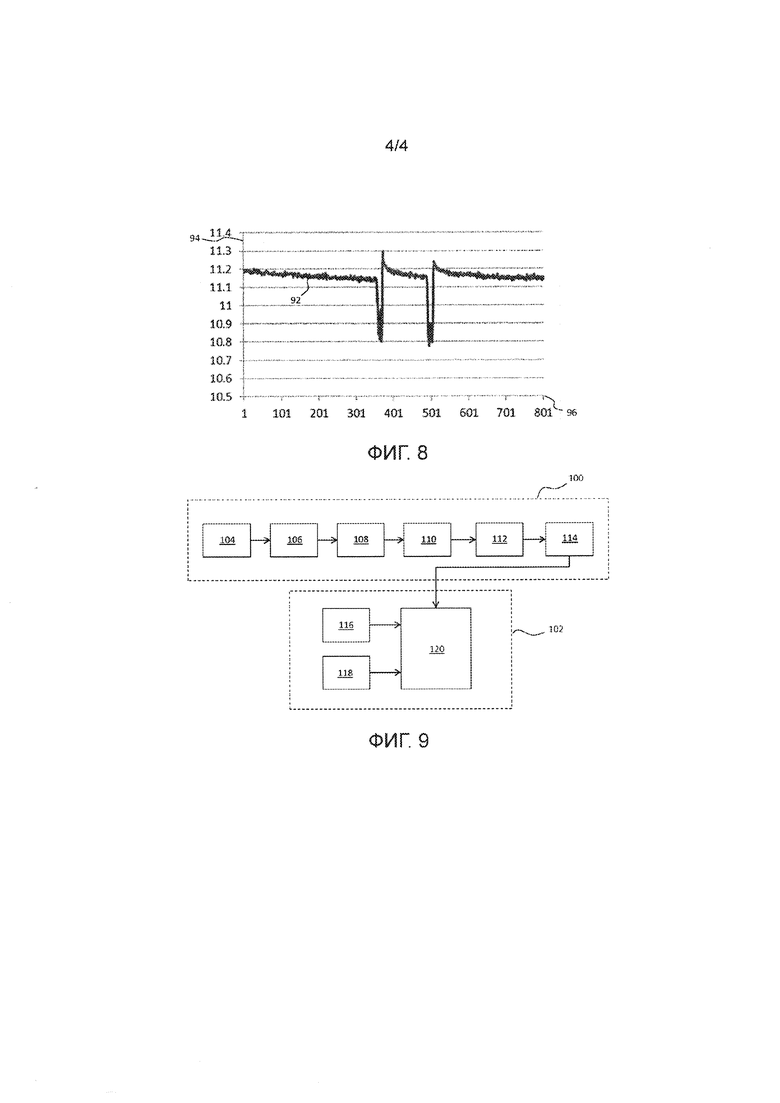
Фигура 8 показывает график, иллюстрирующий измеренные значения сопротивления во времени (примерного ЭАП-привода), при этом нагрузка прилагается в два различных момента времени;
Фигура 9 схематически изображает этапы в примерном процессе работы приводного и сенсорного ЭАП-устройства.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Изобретение представляет приводное и сенсорное устройство, имеющее структуру электроактивного материала (ЭАМ), и контроллер для формирования сигналов возбуждения для подачи к ЭАМ-структуре. Контроллер также может генерировать (слабый) высокочастотный измерительный АС-сигнал поверх большего сигнала возбуждения привода, причем измерительный сигнал имеет частоту, которая находится либо в резонансе, либо в антирезонансе с частотой механического резонанса ЭАМ-структуры. Приложение механических нагрузок к устройству может быть идентифицировано по изменениям импеданса ЭАП-структуры, обусловленным затуханием механического резонанса. Таким образом, устройство облегчает и/или улучшает одновременные восприятие и приведение в действие. Также представлены способы одновременных восприятия и приведения в действие.
Фигуры 1 и 2 описываются в разделе заявки об уровне техники и используются для иллюстрирования, как ЭАП-устройство может работать в общем смысле.
На Фигуре 3 показан ЭАП-привод 22, включающий верхний слой 24 ЭАП-материала, размещенный между двумя электродами. Слоистая конструкция расположена поверх нижнего несущего слоя 26 и соединена с ним. Электроды электрически соединены через элемент 28 обработки сигналов с первым (DC) входом 32 сигнала возбуждения и вторым (АС) входом 34 сигнала возбуждения (контроллер сигналов). Первый вход 32 сигнала возбуждения предназначен для подачи сигнала возбуждения (относительно) высокой мощности (или высокого напряжения) приведения в действие. Второй сигнальный вход 34 предназначен для подачи переменного измерительного сигнала (относительно) низкой мощности (низкого напряжения). Элемент обработки сигналов налагает первый и второй сигналы возбуждения с образованием третьего объединенного сигнала возбуждения (называемого управляющим сигналом), который подается через электроды на ЭАП-привод 22. Элемент обработки сигналов также может иметь несколько выходов, выдающих первый и второй сигналы возбуждения на слой ЭАП-материала так, что они подаются в объединенном виде.
Элемент обработки сигналов в примерах может содержать ряд составляющих элементов для выполнения одной или более из следующих функций: формирования сигналов, объединения и/или разделения сигналов, переключения сигналов, согласования и рассогласования сигналов, измерения сигналов, анализа сигналов. В последнем случае первый и второй входы 32 и 34 сигналов возбуждения могут заключаться в пределах самого блока 28 обработки, содержащего элементы для формирования АС- и/или DC-сигналов, и, в некоторых случаях, элементов для анализа электрических параметров одного или обоих сигналов.
Электрические соединения конфигурации по Фигуре 3 показаны, например, подключенными к электродам электродного узла на верхней и нижней планарных поверхностях структуры ЭАП-слоя. Для этой цели могут быть использованы гибкие электродные узлы. Они могут представлять собой тонкие электроды из металла или электропроводных органических материалов. Приложение DC- и/или АС-напряжений к электродам позволяет генерировать электрическое поле в ЭАП-слое, которое индуцирует соответствующую деформацию.
Хотя первый вход 32 сигналов возбуждения в конфигурации по Фигуре 3 включает DC-вход, в альтернативных конфигурациях этот вход может включать вход АС-сигнала возбуждения. В любом случае относительная мощность (напряжение) воздействующего сигнала возбуждения предпочтительно в значительной мере превышает мощность подаваемого измерительного сигнала. В случае, когда оба сигнала включают АС-сигналы, максимальная амплитуда измерительного сигнала (подаваемого на 34) может составлять менее 10% максимальной амплитуды воздействующего сигнала возбуждения (подаваемого на 32), например, менее 5% или даже менее 1% максимальной амплитуды воздействующего сигнала возбуждения. В случае, когда измерительный сигнал включает АС-сигнал, и воздействующий сигнал включает сигнал DC-смещения с постоянной амплитудой, максимальная амплитуда АС-сигнала может составлять менее 10% постоянной амплитуды сигнала DC-смещения, например, менее 5% или даже менее 1% постоянной амплитуды сигнала DC-смещения. Для примера по Фигуре 3, управляющий сигнал, генерируемый элементом 28 обработки сигналов, содержит высокочастотный низкоамплитудный АС-сигнал, наложенный поверх высокоамплитудного сигнала DC-смещения.
В примере по Фигуре 3 ЭАП представляет собой диэлектрический эластомерный материал (смотри здесь ниже). Как было описано в предыдущих разделах, приложение DC-смещения с достаточной амплитудой к слою 24 электроактивного полимера индуцирует сжатие слоя вдоль первого перпендикулярного направления к пакету 24/26 слоев так, что слой расширяется по направлениям, перпендикулярным первому перпендикулярному направлению, подобно расширению в Фиг. 1. Если слой связан с пассивным несущим слоем 26, то расширение полимера приводит к деформации, подробно разъясненной для Фиг. 2. Например, деформация может включать изгибание или коробление всей структуры в целом, что может быть использовано для создания усилия для приведения в действие. На фигуре 3 конструкция привода 22 показана в «активном» или «сработанном» состоянии, в котором, чтобы вызвать изгибную деформацию структуры, приложено DC-смещение с достаточной амплитудой. Как хорошо известно, степень расширения изменяется относительно величины электрического поля/электрического тока, приложенного к устройству. Поэтому при изменении амплитуды DC-смещения может быть индуцирована деформация различной степени/величины, и различные величины прилагаемых усилий при приведении в действие (или, например, выполнены различные количества работы по приведению в действие).
Высокочастотный АС-сигнал, наложенный поверх DC-смещения, также индуцирует отклик в виде механической деформации в материале, но деформационный отклик, который является периодическим, а не постоянным (то есть колебание). Однако, поскольку максимальная амплитуда высокочастотного сигнала значительно ниже амплитуды сигнала DC-смещения (например, ниже на два порядка величины, чем амплитуда сигнала DC-смещения, например, 1% от этого DC-сигнала), соответствующая амплитуда отклонения стимулированной деформации по существу пренебрежимо мала по сравнению с основным отклонением при приведении в действие. Поэтому точность и стабильность приведения в действие по существу не испытывает влияния от наложения измерительного сигнала.
Наложение низкоамплитудного высокочастотного колебательного сигнала поверх DC-смещения позволяет встроить механизм электрической обратной связи в механизм возбуждения у самого основного привода. При определенных частотах, в частности, при частотах, которые соответствуют частоте механического резонанса или являются гармоническими для структуры привода 22, в материале привода устанавливается слабая механическая стоячая волна. В свою очередь, это влияет на электрические характеристики материала. Когда измерительный сигнал возбуждается при резонансной частоте материала, соответствующий импеданс материала ниже (по сравнению с ситуацией, когда возбуждается не в резонансе) вследствие механической вибрации в фазе с электрическим сигналом возбуждения.
Частота механического резонанса структуры представляет собой частоту, при которой структура будет естественным образом склонна к колебаниям при смещении из ее равновесного положения и определяется собственными структурными характеристиками (например, геометрией, размером, формой, толщиной, массой и т.д.). Механические колебания ЭАП-структуры не обязательно будут следовать частоте возбуждения поданного на нее электрического сигнала, но будут проявлять тенденцию к возвращению к своей естественной резонансной частоте, при взаимодействии этих колебаний с частотой возбуждения либо конструктивно, либо деструктивно, в зависимости от степени, до которой частота возбуждения находится вне фазы и в фазе с естественной частотой колебаний (резонансной частотой).
Когда высокочастотный сигнал возбуждается при антирезонансной частоте ЭАП-структуры, импеданс ЭАП выше вследствие механической вибрации материала, находящегося не в фазе с колебаниями сигнала возбуждения (электрически индуцированные механические деформации находятся не в фазе с электрическим возбуждением). Другими словами, всякий раз, когда, например, сигналом возбуждения на ЭАП подается положительный ток, механические деформации не в фазе в тот же момент индуцируют ток в противоположном направлении (то есть поведение не в фазе). В идеальном (модельном) случае эти противоположные токи нейтрализуют друг друга, и ток вообще не может протекать (то есть бесконечный импеданс), но в реальных ситуациях полная нейтрализация не происходит, и этот эффект измеряется как (эффективное) более высокое сопротивление электрического тока (то есть более высокий импеданс). В частности, когда сигнал возбуждается при антирезонансной частоте материала привода, импеданс ЭАП является максимальным.
Взаимосвязь может быть дополнительно понята при рассмотрении приведенного ниже уравнения (1). Импеданс идеального ЭАП при резонансе и антирезонансе зависит от конкретного типа или режима деформации. Более обычным является приведение ЭАП в резонанс изгибных колебаний (то есть по длине или ширине). Импеданс ЭАП определяется диэлектрическими характеристиками материала и электромеханической связью, и электрическими и механическими потерями. Для простоты, когда игнорируются электрические и механические потери, для ЭАП с длиной l, шириной w и толщиной t, деформируемого при боковом расширении, импеданс ЭАП задается как:
 (1)
(1)
где εT33 представляет собой диэлектрическую постоянную, k31 представляет собой коэффициент боковой электромеханической связи, p представляет собой плотность ЭАП и sE11 представляет собой коэффициент упругой податливости в боковом направлении. При антирезонансной частоте ωa 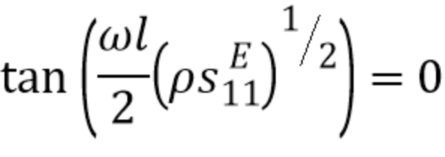 , а Z является наивысшим.
, а Z является наивысшим.
Реальный ЭАП имеет потери и может быть моделирован или представлен конденсатором и резистором, соединенными последовательно, сопротивление которых является наибольшим при антирезонансной частоте. Поэтому в нижеследующих описаниях «импеданс» и «последовательное сопротивление» (RS) могут быть использованы взаимозаменяемо в отношении устройства. Однако последовательное сопротивление должно пониматься в этом контексте как относящееся просто к модели, в которой привод/датчик представлен в электронном отношении конденсатором в последовательном соединении с резистором, имеющим сопротивление RS.
В результате вышеописанной взаимосвязи между импедансом и резонансом, когда сигнал возбуждения возбуждается при антирезонансной частоте, любые небольшие отклонения, которые возникают при его частоте вне антирезонанса, будут детектируемыми по соответствующему резкому падению измеряемого импеданса ЭАП-структуры 22. Это тот физический эффект, который позволяет достигать механического восприятия (нагрузки) и с повышенной точностью. Приложение давления или нагрузки к ЭАП-структуре приводит к демпфированию любых влияний резонанса, которые происходят в пределах материала. Если сигнал возбуждения осциллирует при антирезонансной или резонансной частоте материала, когда приложена нагрузка, эффект затухания будет идентифицируемым в пределах измерений в режиме реального времени импеданса ЭАП (то есть последовательного сопротивления RS), так как внезапное прекращение резонанса будет проявляться в последующем резком снижении импеданса. Поэтому при контроле импеданса структуры во времени, в то время как привод работает (например, при контроле напряжения и тока высокочастотного сигнала во времени), могут быть считаны прилагаемые к структуре давления и нагрузки, и в некоторых случаях количественно измерены (как будет описано ниже).
Связь между импедансом, с одной стороны, и разностью фаз между частотой электрического сигнала возбуждения и частотой механических колебаний материала, с другой стороны, позволяет проводить высокочувствительное измерение приложенных механических усилий к ЭАП путем контроля электрических характеристик только управляющего сигнала. Тем самым это представляет весьма простое, непосредственное и эффективное средство достижения одновременного приведения в действие и восприятия с использованием единственного ЭАП-устройства. Более того, варианты осуществления изобретения обеспечивают возможность одновременного восприятия и приведения в действие в пределах одного и того же участка ЭАП-структуры (то есть пространственно разнесенного одновременного восприятия и приведения в действие). Это значит, что устройство, исполняющее обе функции, может быть выполнено с гораздо меньшим форм-фактором, без жертвования, например, чувствительностью или разрешением при восприятии. Более того, на устройстве требуется обеспечение только единственного комплекта (электрических) соединений (в противоположность двум или более комплектам соединений, по одному для каждого участка, предназначенного для восприятия или приведения в действие, которые необходимы для устройств предшествующего уровня техники), что является преимущественным в плане стоимости и уменьшенной сложности, и в случаях, когда требуются, например, водонепроницаемые соединения (например, в бритвах/катетерах/средствах ухода за полостью рта), и/или когда должен быть сформирован массив из приводов/датчиков.
Частота высокочастотного измерительного сигнала типично может быть в диапазоне от 1 кГц до 1 МГц, в зависимости от конкретной геометрической формы привода. Следует отметить, что в случае, когда сигнал возбуждения привода включает АС-сигнал возбуждения, частота этого сигнала значительно ниже частоты переменного измерительного сигнала. (Низкочастотное) напряжение приведения в действие в этом случае может быть, например, по меньшей мере на два порядка величины ниже напряжения высокочастотного сигнала, чтобы избежать взаимного влияния воздействующего сигнала и измерительного сигнала.
Фигура 4 показывает второй пример приводного и сенсорного ЭАП-устройства согласно вариантам осуществления изобретения, причем компоновка элементов возбуждения и обработки сигналов изображена более подробно. ЭАП-привод 22, такой как описан со ссылкой на Фигуру 3 и имеющий слой 24 ЭАП-материала и пассивный несущий слой 26, удерживается в пределах корпуса 42 и электрически соединен с контроллером 30. Контроллер в примере по Фигуре 4 включает как генерирующие сигнал элементы (элементы возбуждения), так и элементы обработки и анализа сигналов (сенсорные элементы).
Элемент 44 управления привода генерирует высокоамплитудный сигнал возбуждения привода (например, постоянное напряжение DC-смещения), который передается на устройство 46 усиления сигнала. Элемент 48 управления датчиком включает как элемент-драйвер 50 для формирования высокоамплитудных измерительных сигналов, так и элемент 52 обработки для анализа электрических характеристик измерительного сигнала после прохода через привод. Для этой цели механизм 30 возбуждения дополнительно включает вольтметр 54, присоединенный параллельно ЭАП-приводу 22, и амперметр 56, присоединенный последовательно между выходным электрическим выводом 60 привода и элементом 48 управления датчиком. Как вольтметр 54, так и амперметр 56 с помощью линии передачи сигналов соединены с элементом 48 управления датчиком так, что сформированные ими данные могут быть использованы сенсорным элементом 52, чтобы определять импеданс привода 22 (то есть эквивалентное последовательное сопротивление RS, когда устройство моделируется как идеальный конденсатор с резистором в последовательном соединении, то есть действительную часть комплексного импеданса).
Сигналы возбуждения, сформированные элементом 44 управления привода и элементом 48 управления датчика, налагаются элементом 46 усиления либо заранее при их объединенном усилении, либо после их независимого усиления. В некоторых примерах элемент 46 усиления может быть замещен просто сумматором. В этом случае элемент 44 управления привода и элемент 48 управления датчика могут быть приспособлены для локального усиления генерируемых ими сигналов на приведение в действие и восприятие заранее перед выведением их на сумматор. В этом случае компонент 46 может быть просто элементом, подобным элементу 28 обработки сигналов (на фигуре 3).
Объединенный сигнал возбуждения затем передается на входной вывод 62 ЭАП-привода 22. Высокоамплитудная DC-составляющая объединенного сигнала возбуждения индуцирует деформационный отклик в приводе, как иллюстрировано на фигуре 4. ЭАП удерживается в пределах показанного корпуса 42. Для наиболее воспроизводимых (то есть надежных/точных) результатов положение ЭАП может быть зафиксировано. Например, привод может быть закреплен в пределах корпуса 42, и корпус затем позиционирован так, чтобы выровнять устройство с областью целевого воздействия.
Для иллюстрации целевая область 66 воздействия показана на фигуре 4, при этом привод деформируется DC-сигналом возбуждения с приложением давления к целевой области. В примерах целевая область может, например, включать участок человеческой кожи, например, так, что давление может быть приложено к коже, но усилие, приложенное приводом к коже, одновременно воспринимается устройством (например, оно может воспринимать, насколько сильно пользователь прижимает устройство, которое содержит привод, к своей коже). В некоторых примерах может быть дополнительно предусмотрен (необязательный) передающий усилие механизм для приложения усилий управляемым образом к поверхности привода или от него.
Низкоамплитудная АС-составляющая сигнала возбуждения индуцирует низкоамплитудный периодический отклик в ЭАП-слое 24, например, колебания структуры при ее резонансной или антирезонансной частоте.
Напряжение объединенного сигнала возбуждения и результирующий ток подаются на элемент 48 управления датчиком. Как правило, АС-токи могут составлять в диапазоне от 0,1 мА до 1 мА, но могут составлять до 10 мА. Более высокие токи могут вызывать слишком сильное нагревание.
В некоторых случаях механизм 30 возбуждения может дополнительно включать один или более элементов разделения сигналов, например, фильтр верхних частот, с целью отделения высокочастотных составляющих для анализа сенсорным элементом 52 элемента 48 управления датчиком.
Сенсорный элемент 52 элемента 48 управления датчиком может использовать результаты измерений, обеспеченные вольтметром 54 и амперметром 56, чтобы определять последовательное сопротивление на приводе, который подвержен воздействию подаваемого сигнала(ов) возбуждения. Последовательное сопротивление может определяться в режиме реального времени и проконтролированное, например, при внезапных изменениях сопротивления, которые разъяснены выше, может быть использовано для указания на присутствие и величину нагрузок и давлений, прилагаемых к приводу 22.
Чтобы настроить структуру привода 22 на высокочувствительное состояние резонансных или антирезонансных колебаний так, чтобы давления и усилия могли быть легко детектированы по изменениям измеряемого последовательного сопротивления, может быть необходимым или желательным выполнение одного или более этапов калибровки заранее до начала работы привода, чтобы определить резонансную или антирезонансную частоту устройства. Для этой цели может быть выполнены «развертка» для каждого из двух или более фиксированных напряжений приведения в действие в диапазоне частот измерительного сигнала и измерение соответствующего последовательного сопротивления для каждой из измерительных частот. Фигура 5 иллюстрирует набор результатов для одной примерной развертки, в которой по оси y 72 показано измеренное последовательное сопротивление (в Омах), а по оси x 74 показана частота измерительного сигнала (в Гц), и в которой линия 76 показывает соответствующую кривую напряжения приведения в действие 0 В (то есть без приведения в действие), а линия 78 показывает кривую напряжения приведения в действие 150 В. Как можно видеть из графика, значения сопротивления для развертки при 150 В демонстрируют небольшой подъем в двух точках вдоль линии развертки - около 24 кГц и около 40 кГц.
Значения сопротивления для развертки при 0 В не указывают на изменение основной кривой (которая отражает просто емкостную функцию комплексного импеданса) по мере того, как изменяется АС-частота. Эффективность электромеханической связи в ЭАП-материале зависит от величины напряжения DC-смещения (чем выше DC-смещение, тем лучше связь). При смещении 0 В связь является слабой или отсутствует, и поэтому деформационный отклик материала на АС-сигнал является нулевым (или неизмеряемо небольшим). Тем самым развертка при смещении 0 В создает удобный базовый уровень (и, следовательно, калибровочную линию) относительно которой сравнивается развертка АС-частоты при более высоком (вызывающем приведение в действие) напряжении.
Антирезонансная частота устройства может быть идентифицирована нахождением АС-частоты, для которой разность между измеренными значениями сопротивления для двух DC-напряжений является наибольшей. На фигуре 6 более ясно проиллюстрированы разности между двумя кривыми 76 и 78 сигналов, с разностью измеренного сопротивления 82 по оси x и соответствующей измерительной частотой 74 сигнала по оси y. На этом графике четко видны два больших скачка сопротивления, причем больший из двух представляет собой скачок, возникающий при 24 кГц. Поэтому антирезонансная частота примерного устройства, представленного на фигурах 5 и 6, составляет 24 кГц. Это точка наивысшей чувствительности устройства, то есть точка, в которой последовательное сопротивление является наиболее чувствительным к изменениям частоты поданного сигнала возбуждения (или к изменениям антирезонансной частоты структуры для фиксированной частоты приложенного возбуждения).
Хотя для первой развертки в примере согласно Фигурам 5 и 6 используется DC-смещение в 0 В, в альтернативных примерах может использоваться иное (ненулевое) первое смещение. В этом случае, в зависимости от величины первого напряжения, первая развертка может указывать на изменения или пики относительно центральной кривой. Однако антирезонансная частота по-прежнему может быть считана при идентификации частоты, для которой разность между значениями измеренного сопротивления для двух DC-напряжений является наибольшей.
Для иллюстрации эффекта приложения нагрузки к устройству, фигура 7 показывает два сопротивления 72 относительно частоты 74 «развертки» для одного и того же фиксированного (150 В) напряжения DC-смещения, но соответственно различным приложенным к приводу нагрузкам. Линия 86 представляет развертку без приложения нагрузки к устройству. Поэтому эта линия идентична линии 78 на фигуре 5, но показана для более узкого диапазона частот и сопротивлений. Линия 88 представляет развертку для приложенной к приводу нагрузки 0,01 Н. Как можно видеть, влияние нагрузки проявляется в эффективном «сглаживании» выступа на графике сопротивления при резонансной частоте устройства ~24 кГц. Приложение нагрузки 0,01 Н к устройству является достаточным для демпфирования большей части резонансного эффекта, обусловленного поданным высокочастотным сигналом. Это демпфирование позволяет детектировать наличие даже небольших нагрузок.
Этот эффект демпфирования усиливается с возрастанием величины усилия от прилагаемой нагрузки. Эта взаимосвязь позволяет не только просто воспринимать прилагаемые нагрузки, но также количественно измерять их. Чтобы обеспечить измерение нагрузок, может быть необходимым выполнение дополнительного этапа калибровки заранее до начала работы привода. Этот этап калибровки выполняется после определения антирезонансной частоты (описанной выше). Как только становится известной антирезонансная частота, может быть выполнена развертка для фиксированного напряжения DC-смещения и для фиксированной АС-частоты (то есть антирезонансной частоты), и измерение последовательного сопротивления как функции приложенной к устройству нагрузки. Когда известна эта взаимосвязь для данного сигнала с фиксированной частотой, это может быть использовано, когда устройство находится в действии, для возможности применения измеренного последовательного сопротивления в качестве почти прямой меры величины приложенной нагрузки.
Для иллюстрирования этого, на фигуре 8 показан сигнал 92, представляющий изменение измеренного последовательного сопротивления 94 (в Омах) во времени (в произвольных единицах) 96 для примерного приводящего в действие устройства, возбуждаемого фиксированным DC-смещением 150 В и фиксированной АС-частотой 24 кГц (резонансной частотой обсуждаемого устройства). В моменты времени t=350 и времени t=500 привод нагружается нагрузкой 10 граммов. В каждом случае это приводит к резкому снижению сопротивления 94, которое продолжается на протяжении каждого приложения нагрузки. Из фигуры 8 ясно, что устройство обеспечивает быстрый и высокоточный отклик на приложенную нагрузку, что является идеальным для сенсорных применений. Хотя величина приложенного усилия в этом случае уже известна, за счет выполнения описанного выше этапа калибровки заранее перед началом работы график показанного на фигуре 8 типа мог бы быть легко использован для определения не только событий нагружения во времени, но и их точных величин.
Как обсуждалось выше, для полной функциональности устройства, как в качестве привода, так и в качестве датчика, способного измерять величину и моменты времени создания приложенных нагрузок, могут потребоваться ряд подготовительных этапов калибровки. На фигуре 9 показана схематическая диаграмма, иллюстрирующая этапы примерного режима работы устройства. Показан первый набор 100 этапов, которые представляют подготовительные этапы калибровки, выполняемые заранее перед эксплуатацией устройства. Показан второй набор 102 этапов, которые представляют этапы, выполняемые во время применения устройства.
Подготовительная стадия 100 включает этапы для определения резонансной частоты устройства и для определения взаимосвязи между измеренным сопротивлением и приложенной нагрузкой при указанной определенной резонансной частоте. Выполняется первая частотная развертка 104 при приложенном DC-смещении 0 В, и измеряются отклики сопротивления. Затем на этапе 106 прилагается фиксированное DC-смещение, предпочтительно соответствующее желательному состоянию приведения в действие устройства. Затем на этапе 108 выполняется вторая частотная развертка при фиксированном ненулевом DC-смещении, и регистрируются соответствующие значения сопротивления. Затем на этапе 110 результаты двух разверток сравниваются для определения разности в полученных значениях сопротивления для каждой из диапазона частот (смотри фигуры 5 и 6). На этапе 112 определяется частота, для которой измеренные значения сопротивления отличаются на наибольшую величину, и тем самым непосредственно идентифицируется антирезонансная частота. Наконец, на этапе 114 получают калибровочные данные для последовательного сопротивления в устройстве в зависимости от приложенной нагрузки для фиксированного напряжения DC-смещения и фиксированной частоты АС-сигнала, равной антирезонансной частоте, определенной на этапе 112.
Следует отметить, что этапы 106-114 в некоторых случаях могут быть повторены для стольких DC-напряжений, сколько требуется, например, для накопления данных, относящихся к множеству различных положений приведения в действие, в случае, если предполагается использование изменяемой степени приведения в действие при работе устройства.
Как только были выполнены этапы 100 калибровки, устройство может быть приведено в действие согласно этапам стадии 102 эксплуатации. Сюда входит только (этап 116) применение элемента 48 управления датчиком (смотри фигуру 4) для возбуждения высокочастотного измерительного сигнала при частоте, равной антирезонансной частоте, которая определена на этапе 112, и для одновременного измерения сопротивления ЭАП во времени, когда устройство находится в режиме применения.
В то же время на этапе 118 прилагается высокоамплитудное воздействующее смещение, как и когда требуется, для стимулирования в ответ соответствующей деформации.
Полученные на этапе 116 значения сопротивления могут контролироваться на этапе 120, и с помощью полученных на этапе 114 калибровочных данных определяется в режиме реального времени величина любых приложенных нагрузок. Различные наборы калибровочных данных могут быть использованы для различных величин приложенного приводящего в действие напряжения, например, чтобы тем самым обеспечить сенсорную функциональность в любом конкретном состоянии приведения в действие.
Фигура 9 представляет один простой пример использования устройства. Однако в одном или более альтернативных вариантах осуществления этапы калибровки подготовительной стадии 100 могут быть исключены без ухудшения надежности и чувствительности устройства, тем самым благоприятным образом сокращая сложность и стоимость системы. Согласно этим вариантам осуществления, резонансная частота fr привода тщательно контролируется во время изготовления устройства, так что антирезонансная (или резонансная) частота уже известна заранее, и может не быть подверженной изменениям во времени или при различных условиях.
Надежность результатов, полученных в этих вариантах осуществления, может быть дополнительно повышена (например, с учетом возможного изменения резонансной частоты материала вследствие изменений температуры) дополнительным измерением импеданса устройства во времени для частоты(частот) подаваемого сигнала возбуждения, для которого известен слабый зависимый от нагрузки (импеданс) отклик. Например, могут быть идеально использованы частоты, которые находятся ниже резонансной частоты (например, ~20 кГц для устройства, представленного на фигурах 5-8), чтобы избежать совпадения с гармониками (например, fr/2, fr/3, fr/5), и тем самым по существу устранить любые возможные зависимости измеренного импеданса от нагрузки.
При контроле импеданса для этих частот, по существу в то же время, как для более высокой (соответствующей резонансу) частоты (например, последовательным чередованием между двумя частотами для сбора данных для обоих), можно, сравнив две частоты, определять, обусловлены ли измеренные изменения импеданса при более высокой частоте приложенными нагрузками, или же они скорее вызваны некоторым естественным дрейфом вследствие температурных (или прочих физических) изменений материала. Когда значения импеданса при нерезонансной частоте указывают на дрейф от ожидаемых «заводских» значений, это указывает на то, что резонансная частота материала изменилась по не связанным с нагрузкой причинам, и это изменение может быть учтено при измерениях нагрузки, например, переключением для обращения к по-иному калиброванной справочной таблице для оценки нагрузки при резонансной частоте.
Способ согласно этому варианту осуществления может дополнительно включать определение соотношения между результатами измерений импеданса для резонансной и нерезонансной частот, чтобы получить меру соотносимого с нагрузкой импеданса с контролированием влияния внешних факторов, таких как температура.
Согласно одному или более вариантам осуществления, может быть обеспечено приводное и сенсорное устройство, содержащее множество приводных устройств согласно вышеописанным примерам, например, размещенные в массиве, или другой желательной компоновке/форме. В примерах множество устройств может быть обеспечено так, что каждое из них имеет уникальную частоту fr механического резонанса. Таким образом, при подаче высокочастотных измерительных сигналов на массив устройств характеристическая (уникальная) резонансная частота каждого устройства может быть использована для определения того, какой привод в массиве индуцируется как датчик, то есть для указания положения датчика/привода в массиве.
Например, общий сигнал возбуждения может быть подан на все устройства в массиве, причем общий сигнал включает последовательные серии сигналов с различными частотами (то есть известными различными резонансными или антирезонансными частотами устройств). Если временная развертка частот является более быстрой, чем входной сигнал от датчика, то соответствующее падение (или возрастание) импеданса будет детектироваться среди устройств только для частоты, соответствующей конкретному устройству, которое возбуждается, то есть измеренный импеданс будет снижаться, когда частотная развертка доходит до fr, соответствующей возбуждаемому устройству, и затем опять будет возрастать (или наоборот), когда развертка отходит от fr.
Хотя в приведенном здесь выше подробном описании конструкция и работа устройств и систем согласно изобретению были описаны для ЭАП-материалов, изобретение фактически может быть использовано для устройств на основе ЭАМ-материалов других типов. Поэтому, если не оговаривается иное, вышеуказанные ЭАП-материалы могут быть заменены другими ЭАМ-материалами. Такие другие ЭАМ-материалы известны в области техники, и квалифицированному специалисту в этой области техники будет известно, где их найти и как их применить. Ряд вариантов будет описан здесь ниже.
ЭАМ-устройства обычно подразделяются на ЭАМ с возбуждением полем и возбуждением током или зарядом (ионами). ЭАМ с возбуждением полем приводятся в действие электрическим полем путем прямой электромеханической связи, тогда как механизм приведения в действие для ЭАМ с возбуждением током или зарядом включает диффузию ионов. Последний механизм чаще встречается в соответствующих органических ЭАМ, таких как ЭАП. В то время как ЭАМ с возбуждением полем, как правило, возбуждаются сигналами напряжения и нуждаются в соответствующих драйверах/контроллерах напряжения, ЭАМ с возбуждением током обычно возбуждаются токовыми или зарядовыми сигналами, требующих иногда токовых драйверов. Оба класса материалов имеют многочисленные представители семейства, каждый из которых имеет свои собственные преимущества и недостатки.
ЭАМ с возбуждением полем могут представлять собой органические или неорганические материалы, и в случае органических могут быть мономолекулярными, олигомерными или полимерными. Для настоящего изобретения предпочтительны органические, а затем также олигомерные или даже полимерные. Органические материалы и, в частности, полимеры, представляют собой развивающийся класс материалов, вызывающих растущий интерес, поскольку они объединяют свойства приведения в действие с такими характеристиками материала, как небольшой вес, недорогое изготовление и легкая обработка.
ЭАМ с возбуждением полем, и тем самым также ЭАП, как правило, представляют собой пьезоэлектрические и, возможно, ферроэлектрические материалы, и тем самым имеют спонтанную постоянную поляризацию (дипольный момент), являются электрострикционными, и тем самым предусматривают поляризацию (дипольный момент), только когда возбуждаются, но не поляризованы, когда не возбуждены, или представляют собой диэлектрические релаксорные материалы. Такие полимеры включают, но не ограничиваются этим, подклассы: пьезоэлектрические полимеры, ферроэлектрические полимеры, электрострикционные полимеры, релаксорные ферроэлектрические полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры.
Отсутствие спонтанной поляризации означает, что электрострикционные материалы демонстрируют небольшие потери на гистерезис или вообще не имеют их даже при очень высоких эксплуатационных частотах. Однако преимущества достигаются за счет температурной стабильности. Релаксоры работают лучше в ситуациях, когда температура может быть стабилизирована в пределах приблизительно 10°С. На первый взгляд это может представляться чрезвычайно ограничивающим обстоятельством, но при том, что электрострикционные материалы являются превосходными при высоких частотах и очень низких напряженностях полей возбуждения, то вариантами применения чаще являются специализированные микроприводы. Стабилизация температуры таких небольших устройств относительно проста и часто составляет лишь незначительную проблему в общем процессе конструирования и разработки.
ЭАМ- или ЭАП-материал предпочтительно представляет собой электрострикционный полимер. Более предпочтительно, он является релаксорным ферроэлектрическим полимером. Такие материалы могут иметь коэффициент электрострикции, который достаточно высок для хорошего практического применения, то есть благоприятен для одновременного исполнения функций восприятия и приведения в действие. Релаксорные ферроэлектрические материалы не являются ферроэлектрическими, когда к ним прилагается нулевое поле возбуждения (то есть напряжение), но становятся ферроэлектрическими во время возбуждения. Поэтому электромеханическая связь не присутствует в материале без возбуждения. Электромеханическая связь становится ненулевой, когда подается сигнал возбуждения, и может быть измерена подачей высокочастотного сигнала небольшой амплитуды поверх сигнала возбуждения, в соответствии с описанными выше процедурами. Более того, релаксорные ферроэлектрические материалы предпочтительны благодаря уникальному сочетанию высокой электромеханической связи при ненулевом сигнале возбуждения и хороших характеристик приведения в действие.
Наиболее широко применяемыми примерами неорганических релаксорных ферроэлектрических материалов являются: ниобат магния-свинца (PMN), ниобат магния-свинца-титанат свинца (PMN-PT) и титанат-цирконат лантана-свинца (PLZT). Но в области техники известны и другие.
Примерами ЭАП с возбуждением полем являются пьезоэлектрические полимеры, ферроэлектрические полимеры, электрострикционные полимеры (такие как релаксорные полимеры на основе поливинилиденфторида (PVDF) или полиуретаны), диэлектрические эластомеры и жидкокристаллические эластомеры (LCE). Таким образом, ЭАП-материал предпочтительно представляет собой релаксорный ферроэлектрический полимер, например, такой как релаксорный ферроэлектрический полимер на основе PVDF. Такие материалы могут быть любыми, выбранными из группы материалов, приведенных здесь ниже.
Подкласс электрострикционных полимеров включает, но не ограничивается этим:
поливинилиденфторид (PVDF), поливинилиденфторид-трифторэтилен (PVDF-TrFE), поливинилиденфторид-трифторэтилен-хлорфторэтилен (PVDF-TrFE-CFE), поливинилиденфторид-трифторэтилен-хлортрифторэтилен (PVDF-TrFE-CTFE), поливинилиденфторид-гексафторпропилен (PVDF-HFP), полиуретаны, или их смеси.
ЭАМ- или ЭАП-материалы с возбуждением током включают сопряженные полимеры, ионные полимер-металлические композиты, ионные гели и полимерные гели.
Примерами ЭАП с возбуждением ионами являются сопряженные полимеры, полимерные композиты с углеродными нанотрубками (CNT) и ионные полимер-металлические композиты (IPMC).
Подкласс диэлектрических эластомеров включает, но не ограничивается этим:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает, но не ограничивается этим:
полипиррол, поли-3,4-этилендиокситиофен, поли(пара-фениленсульфид), полианилины.
Вышеуказанные материалы могут быть имплантированы в виде чистых материалов или в виде материалов, суспендированных в матричных материалах. Матричные материалы могут включать полимеры.
Для любой приводной структуры, включающей ЭАМ-материал, могут быть предусмотрены дополнительные пассивные слои для влияния на поведение ЭАМ-слоя в ответ на поданный сигнал возбуждения.
Узел или структура привода у ЭАП-устройства может иметь один или более электродов для выдачи управляющего сигнала или сигнала возбуждения на по меньшей мере часть электроактивного материала. Узел предпочтительно включает два электрода. ЭАП может быть размещен между двумя или более электродами. Такое размещение требуется для узла привода, который содержит эластомерный диэлектрический материал, поскольку его приведение в действие, помимо всего прочего, обусловлено сжимающим усилием, оказываемым электродами, которые притягиваются друг к другу под действием сигнала возбуждения. Два или более электродов также могут быть внедрены в эластомерный диэлектрический материал. Электроды могут быть структурированы или нет.
Частью узла приведения в действие может быть подложка. Она может быть присоединена к узлу из ЭАП и электродов между электродами или снаружи к одному из электродов.
Электроды могут быть растяжимыми так, что они следуют за деформацией слоя ЭАМ-материала. Это является особенно благоприятным для ЭАП-материалов. Пригодные для электродов материалы также известны, и, например, могут быть выбраны из группы, состоящей из тонких пленок металлов, таких как золото, медь или алюминий, или органических проводников, таких как сажа, углеродные нанотрубки, графен, полианилин (PANI), поли-3,4-этилендиокситиофен (PEDOT), например, поли-3,4-этилендиокситиофен:полистиролсульфонат (PEDOT:PSS). Также могут быть использованы металлизированные сложнополиэфирные пленки, такие как металлизированный полиэтилентерефталат (PET), например, с использованием алюминиевого покрытия.
Материалы для различных слоев будут выбираться, например, принимая во внимание модуль упругости (модуль Юнга) различных слоев.
Для согласования электрических или механических характеристик устройства могут быть использованы дополнительные слои к обсуждаемым выше слоям, такие как дополнительные полимерные слои.
Устройство может быть использовано как одиночный привод или же может представлять собой линию или массив устройств, например, для обеспечения управления по двумерному (2D) или трехмерному (3D) контуру.
Изобретение также может быть использовано во многих вариантах применения ЭАП, включая примеры, где представляет интерес пассивный матричный массив приводов.
Во многих вариантах применения основное назначение изделия основывается на (локальном) воздействии на ткани человека или на приведении в действие контактирующих с тканью поверхностей раздела. В таких вариантах применения, например, ЭАП-приводы обеспечивают уникальные преимущества, главным образом благодаря небольшому форм-фактору, гибкости и высокой плотности энергии. Следовательно, ЭАП могут быть легко встроены в мягкие, трехмерные и/или миниатюрные изделия и интерфейсы. Примерами таких вариантов применения являются:
косметические средства ухода за кожей, такие как устройства стимулирования кожи в форме трансдермальных пластырей на основе ЭАП, которые создают постоянное или периодическое натяжение кожи, чтобы растягивать кожу или сокращать морщины;
дыхательные устройства с маской-интерфейсом пациента, которая имеет активную амортизацию или уплотнение на основе ЭАП, для создания переменного нормального давления на кожу, которое сокращает или предотвращает красные пятна на лице;
электрические бритвы с самонастраивающейся бритвенной головкой. Высота контактирующих с кожей поверхностей может быть скорректирована с использованием ЭАП-приводов, чтобы влиять на баланс между сближением и раздражением;
устройства для очистки ротовой полости, такие как воздушный ирригатор с динамическим приводом сопла, чтобы улучшить досягаемость струи, особенно в промежутках между зубами. В альтернативном варианте, зубные щетки могут быть оснащены активируемыми пучками;
устройства бытовой электроники или сенсорные панели, которые создают локальную тактильную обратную связь посредством массива ЭАП-преобразователей, которые встроены в пользовательский интерфейс или рядом с ним;
катетеры с ориентируемым наконечником для обеспечения простого целенаправленного продвижения в извилистых кровеносных сосудах.
Другая категория соответствующего применения, которая извлекает пользу из ЭАП-приводов, относится к модификации света. Такие оптические элементы, как линзы, отражающие поверхности, решетки и т.д., могут быть выполнены приспособляемыми путем адаптации формы или положения с использованием ЭАП-приводов. Здесь преимуществом ЭАП является, например, низкое энергопотребление.
Другие вариации к раскрытым вариантам осуществления могут быть поняты и осуществлены квалифицированными специалистами в этой области техники при практической реализации заявленного изобретения, из изучения чертежей, раскрытия и пунктов прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов или этапов, а форма единственного числа не исключает множества. Только тот факт, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что не может быть использована с пользой комбинация этих мер. Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКОГО ПАРАМЕТРА | 2017 |
|
RU2750352C2 |
| ДАТЧИК ПОТОКА И СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА | 2017 |
|
RU2768159C2 |
| УСТРОЙСТВО МОЛОКООТСОСА | 2017 |
|
RU2754631C2 |
| ДАТЧИКИ НА ОСНОВЕ ЭЛЕКТРОАКТИВНЫХ ПОЛИМЕРОВ И СПОСОБЫ ВОСПРИЯТИЯ | 2016 |
|
RU2723887C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2737789C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОПТИЧЕСКОГО ПУЧКА | 2017 |
|
RU2769092C2 |
| ЭАП-ПРИВОД И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2750680C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОПТИЧЕСКОГО ПУЧКА | 2017 |
|
RU2750110C2 |
| УСТРОЙСТВО С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2720478C2 |
| ИСПОЛНИТЕЛЬНОЕ И СЧИТЫВАЮЩЕЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2018 |
|
RU2753750C2 |
Представлено объединенное приводное и сенсорное устройство, имеющее структуру (22) электроактивного материала (ЭАП) и контроллер для формирования управляющего сигнала, подаваемого на ЭАП-структуру. Контроллер выполнен с возможностью наложения слабого высокочастотного измерительного АС-сигнала (34) поверх большего воздействующего сигнала (32) возбуждения, причем измерительный сигнал имеет частоту, которая резонирует с частотой механического резонанса или частотой антирезонанса ЭАП-структуры. Приложение механических нагрузок к устройству может быть идентифицировано по изменениям импеданса ЭАП-структуры, обусловленным затуханием механического резонанса. Таким образом, устройство способствует одновременным восприятию и актюации. Также представлен соответствующий способ одновременных восприятия и актюации. Реализация заявленного решения позволяет оптимизировать устройство и способ для достижения высокой чувствительности восприятия, которая содействует точному измерению величины прилагаемых механических нагрузок в режиме реального времени. 2 н. и 18 з.п. ф-лы, 9 ил.
1. Приводное и сенсорное устройство на основе электроактивного полимера, включающее в себя:
- привод (22), содержащий:
- материал привода, содержащий электроактивный полимер, способный деформироваться при подаче на него управляющего сигнала, причем привод имеет частоту механического резонанса и соответствующую частоту механического антирезонанса;
- узел для подачи первого управляющего сигнала, предназначенного для применения при актюации, на по меньшей мере первую часть материала привода;
- электродный узел для подачи второго электрического управляющего сигнала, предназначенного для применения при восприятии, на по меньшей мере вторую часть материала привода,
- контроллер (30), выполненный с возможностью:
- выдачи первого управляющего сигнала на упомянутый узел;
- выдачи второго электрического управляющего сигнала на упомянутый электродный узел,
причем контроллер дополнительно выполнен с возможностью:
- выдачи первого управляющего сигнала и второго электрического управляющего сигнала так, что они могут быть поданы на соответствующие части материала привода одновременно; и
- выдачи второго электрического управляющего сигнала в виде переменного сигнала, имеющего измерительную частоту, которая является гармонической либо с частотой механического резонанса, либо с частотой механического антирезонанса.
2. Приводное и сенсорное устройство по п. 1, в котором:
- упомянутый узел представляет собой первый электродный узел;
- упомянутый электродный узел представляет собой второй электродный узел; и
контроллер дополнительно выполнен с возможностью выдачи первого управляющего сигнала в виде первого-второго электрического управляющего сигнала на первый электродный узел.
3. Приводное и сенсорное устройство по п. 1 или 2, в котором первый электродный узел и второй электродный узел выполнены так, что упомянутая по меньшей мере первая часть материала привода и упомянутая по меньшей мере вторая часть материала привода частично или полностью перекрываются.
4. Приводное и сенсорное устройство по п. 2 или 3, в котором первый электродный узел является таким же, что и второй электродный узел.
5. Приводное и сенсорное устройство по п. 3 или 4, в котором контроллер выполнен с возможностью формирования объединенного электрического управляющего сигнала наложением первого электрического управляющего сигнала и второго электрического управляющего сигнала, и при этом контроллер содержит электрический выходной вывод для выдачи объединенного электрического управляющего сигнала на один или более электродных узлов.
6. Приводное и сенсорное устройство по любому из предшествующих пунктов, дополнительно содержащее сенсорный элемент (52) в электрической связи с первым электродным узлом, причем сенсорный элемент выполнен с возможностью:
- измерения для каждого из одного или более моментов времени одного или более электрических параметров первого электрического управляющего сигнала или объединенного электрического управляющего сигнала, по которым можно определить импеданс привода (22) в каждый из упомянутых одного или более моментов времени, или
- измерения для каждого из одного или более моментов времени одного или более электрических параметров первого электрического управляющего сигнала или объединенного электрического управляющего сигнала и последующего определения импеданса привода (22) для каждого из упомянутых одного или более моментов времени по измеренным одному или более электрическим параметрам.
7. Приводное и сенсорное устройство по п. 6, в котором сенсорный элемент дополнительно выполнен с возможностью определения величины механической нагрузки, приложенной к приводу (22), в упомянутые один или более моменты времени по измеренным одному или более электрическим параметрам или по определенному импедансу привода.
8. Приводное и сенсорное устройство по любому из предшествующих пунктов, в котором контроллер дополнительно выполнен с возможностью:
- выдачи первого электрического управляющего сигнала с первым уровнем; и
- выдачи второго электрического управляющего сигнала с меньшей амплитудой сигнала, чем первый уровень.
9. Приводное и сенсорное устройство по п. 8, в котором контроллер дополнительно выполнен с возможностью:
- выдачи первого электрического управляющего сигнала в виде переменного сигнала, имеющего частоту актюации, которая меньше измерительной частоты.
10. Приводное и сенсорное устройство по любому из пп. 1-7, причем приводное и сенсорное устройство содержит множество структур (22) электроактивного материала, каждая из которых имеет различную частоту механического резонанса.
11. Приводное и сенсорное устройство по любому из предшествующих пунктов, в котором электроактивный полимер содержит неорганический релаксорный ферроэлектрический материал и/или органический релаксорный ферроэлектрический материал.
12. Способ актюации и восприятия с использованием приводного и сенсорного устройства на основе электроактивного полимера по п. 1, включающий этапы:
- выдачи первого управляющего сигнала для актюации приводного и сенсорного устройства;
- выдачи второго электрического управляющего сигнала для осуществления восприятия приводным и сенсорным устройством,
причем первый управляющий сигнал и второй электрический управляющий сигнал выдают так, что они подаются на соответствующие части материала привода одновременно; и при этом второй электрический управляющий сигнал выдается в виде переменного сигнала, имеющего измерительную частоту, которая является гармонической либо с частотой механического резонанса, либо с частотой механического антирезонанса.
13. Способ по п. 12, в котором упомянутый узел представляет собой первый электродный узел, а упомянутый электродный узел представляет собой второй электродный узел, и при этом:
- выдача первого управляющего сигнала содержит его выдачу в виде первого электрического управляющего сигнала на первый электродный узел.
14. Способ по п. 13, в котором первый электродный узел является таким же, что и второй электродный узел.
15. Способ по п. 13 или 14, включающий дополнительный этап формирования объединенного электрического управляющего сигнала наложением первого электрического управляющего сигнала и второго электрического управляющего сигнала.
16. Способ по любому из пп. 13-15, включающий дополнительный этап:
- измерения для каждого из одного или более моментов времени одного или более электрических параметров первого электрического управляющего сигнала или объединенного электрического управляющего сигнала, по которым можно определить импеданс привода (22) в каждый из упомянутых одного или более моментов времени, или
- измерения для каждого из одного или более моментов времени одного или более электрических параметров первого электрического управляющего сигнала или объединенного электрического управляющего сигнала и последующего определения импеданса привода (22) для каждого из упомянутых одного или более моментов времени по измеренным одному или более электрическим параметрам.
17. Способ по п.16, включающий этап определения величины механической нагрузки, приложенной к приводу (22), в упомянутые один или более моменты времени по измеренным одному или более электрическим параметрам или по определенному импедансу привода.
18. Способ по п. 12 или 13, в котором:
- первый электрический управляющий сигнал имеет первый уровень; и
- выдача второго электрического управляющего сигнала содержит его выдачу с меньшей амплитудой сигнала, чем первый уровень.
19. Способ по любому из пп. 12-18, дополнительно включающий определение калибровочной резонансной частоты привода (22), содержащее этапы:
- для каждого из двух первых управляющих сигналов постоянного уровня:
- изменения измерительной частоты по диапазону частот;
- измерения соответствующего импеданса привода для каждой частоты по мере изменения упомянутой частоты; и
- определения калибровочной резонансной частоты путем идентификации измерительной частоты, для которой соответствующий измеренный импеданс при упомянутых двух первых управляющих сигналах постоянного уровня отличается на наибольшую величину.
20. Способ по любому из пп. 12-19, дополнительно включающий определение калибровочной механической нагрузки, прилагаемой к приводу, содержащее этапы:
- для фиксированной частоты измерительного сигнала:
- изменения механической нагрузки, прилагаемой к приводу по диапазону механических нагрузок; и
- измерения соответствующего импеданса привода для каждой механической нагрузки по мере изменения упомянутой механической нагрузки.
| US 2009021114 A1, 22.01 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| ТЕРМОПЛАСТИЧНАЯ ПОВЯЗКА, ОБЛАДАЮЩАЯ ИСКЛЮЧИТЕЛЬНОЙ ДЕФОРМАТИВНОСТЬЮ И ЖЕСТКОСТЬЮ, И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2014 |
|
RU2654194C2 |
| US 2003067245 A1, 10.04.2003 | |||
| WO 2012122440, 13.09.2012. | |||

