Изобретение относится к области волоконно-оптической метрологии и технических средств охраны (ТСО) важных объектов и границ на основе извещателей, датчиков или сенсоров, использующих в качестве чувствительного элемента волоконно-оптический кабель (ВОК), а в качестве измерительных средств - рефлектометры и способы получения виброакустической измерительной информации, связанные с эффектом Рамана.
Оно может быть использован для повышения сигнализационной надежности существующих и разрабатываемых в различных условиях их эксплуатации, в том числе при действии помех различного происхождения. Технический результат от использования изобретения заключается в уменьшении вероятности ложных срабатываний, приводящих к формированию сигналов ложной тревоги.
Известен «Способ охраны периметра объекта» ([1], RU 2263968, МПИ7 G08B 13/02). Он обеспечивает охрану любых типов ограждений от перелаза, разрушения и подкопа. Данный способ предполагает установку ограждения, монтаж чувствительного элемента (ЧЭ) на фланг протяженного ограждения, определение амплитудно-частотных характеристик сигнала, получаемого от ЧЭ, характерных для преодоления нарушителем ограждения методом перелаза, разрушения или подкопа, обработку текущего значения сигнала с ЧЭ и по мере получения определенных ранее характеристик сигнала - выдачу тревожного сообщения.
К недостаткам данного способа охраны следует отнести:
- большие затраты на монтаж и настройку оборудования, вызванные сложностью выполняемых работ по обеспечению охраны важных объектов с использованием инженерных сооружений заградительного типа;
- большие затраты при необходимости изменения границ охраняемой территории;
- отсутствие функции определения способа преодоления нарушителем ограждения;
- снижение вероятности обнаружения и повышение вероятности ложных срабатываний при воздействии климатических факторов: ветровых нагрузок, обледенения, снежных заносов и температуры окружающей среды.
Также известным является «Способ охраны периметра объекта» ([2], патент 2473970 С1, МПИ7 G08B 13/02, опубликованный 27.01.2013 г., бюл. №3) заключающийся в том, что устанавливают чувствительный элемент (ЧЭ) извещателя на участке ограждения, устанавливают признаки сигнала, определяющие преодоление нарушителем ограждения, фиксируют полученные значения сигналов с чувствительных элементов и выделяют из них признаки, свойственные нарушителю, сравнивают значение с их установленной величиной и по результатам сравнения определяют момент выдачи сигнала тревоги, отличающийся тем, что выделяют конструктивно законченный элемент ограждения, исходя из его пространственных параметров, определяют зоны воздействия на него нарушителя в процессе преодоления способом перелаза, формируют независимые зоны чувствительности на полотне ограждения, определяют последовательность появления сигналов из сформированных зон чувствительности и предельные значения времени между сигналами этой последовательности, получают сигналы из зон чувствительности и сравнивают полученный порядок формирования сигналов с определенной ранее последовательностью, а также интервалы времени между сигналами из независимых зон чувствительности, в случае совпадения полученного порядка с определенной последовательностью и нахождения времени между сигналами из независимых зон чувствительности в определенных изначально временных интервалах, выдают сигнал тревоги.
Способ [2] по п. 1 также отличается тем, что определяют зоны воздействия нарушителя на ограждение в процессе преодоления способом контроля разрушения инженерного сооружения заградительного типа и устанавливают порядок появления сигналов в определенных ранее зонах чувствительности.
При этом в качестве извещателя используют генератор частоты с включенным в его частотно задающую цель емкостным ЧЭ, оказывающим влияние на частоту генератора. Описание работы такого извещателя приведено в патентах ([3], патент RU 2126173, МПК G08B 13/26, [4], патент RU 2379759, МПК G08B 13/26 и [5], патент RU 2491646, МПК G08C 15/08, G08B 13/26).
К недостаткам такого способа охраны периметра следует отнести:
необходимость дополнительного контроля состояния пространства, окружающего заграждение;
- необходимость контроля состояния чувствительных элементов и извещателей и оперативной оценки влияния на них погодных условий для осуществления необходимой регулировки порогов, превышение которых приводит к формированию сигналов тревоги;
- невозможность определения места проникновения нарушителя в пределах зоны действия одного чувствительного элемента;
- недостаточную сигнализационную надежность извещателя, для повышения которой используют сигнализационное заграждение, что не представляет возможным при использовании технических средств охраны (ТСО) незаградительного типа.
Также к числу общих недостатков существующих способов и технических средств охраны, использующих различные чувствительные элементы (ЧЭ) и извещатели, на основе сигналов которых формируют сообщения тревоги, следует отнести:
- ориентацию на системы охраны объектов заградительного типа, предполагающего установку заграждений, что не всегда возможно, прежде всего, из-за необходимости значительных затрат и времени на их возведение, однако при отсутствии заграждений существенно повышаются требования к сигнализационной надежности извещателей, которые при существующей системе обработки формируемых сигналов и получаемой информации не могут быть обеспечены;
- невозможность поддержания сигнализационной надежности ЧЭ и извещателей на требуемом уровне, что связано с ростом числа воздействий на ЧЭ и извещатели, которые воспринимаются ими в качестве помех и приводят, в итоге, к уменьшению вероятности обнаружения нарушителя и к сокращению интервалов времени между сигналами ложных тревог (этот недостаток становится одним из основных при искусственно формируемых воздействиях на ЧЭ, извещатели, системы сбора информации и каналы связи);
- наличие ситуаций, при которых наблюдаются ограниченные возможности обнаружения фактов проникновения нарушителей на охраняемые зоны и территории при использовании ЧЭ и извещателей одного типа, отсутствие достаточно эффективных способов комплексирования сигналов ЧЭ и извещателей, использующих различные физические принципы обнаружения фактов нарушений;
- отсутствие возможности оперативного контроля правильности функционирования извещателей, оценивания показателей достоверности формируемых ими данных и сигналов и обеспечения самонастройки извещателей, систем сбора информации и устройств принятия решений под изменившиеся условия эксплуатации, определяемые изменением состояния внешней среды под влиянием различных погодных влияний и появляющимися при этом помехами, что, в конечном итоге, приводит к увеличению вероятности формирования сообщений ложной тревоги (только в ряде случаев используют самоконтроль в виде самотестирования ЧЭ и извещателей, которые проводят по истечению заданного времени или циклов работы [4]);
- недостаточно эффективное использование современных цифровых методов обработки сигналов, обеспечивающих повышение сигнализационной надежности ЧЭ и извещателей (обработку данных и сигналов, если и используют, то после сбора информации от извещателей по каналам связи (проводным или беспроводным), которые не обладают требуемыми показателями помехоустойчивости, из-за чего растет неопределенность при принятии решений).
Наиболее близким аналогом является «Способ оперативно-технической охраны рубежей объектов и границ», патент RU №2705770, заявка №2018119750 с приоритетом от 29.05.2018 г., опубл. 11.11.2019 г., бюл. №32 [6]. Он заключается в том, что устанавливают чувствительные элементы (ЧЭ), составляющие основу построения технических средств охраны (ТСО), выбирают наиболее информативные признаки сигнала, формируемые чувствительными элементами (ЧЭ) извещателей, по которым идентифицируют факт преодоления нарушителем зоны охраны, фиксируют полученные значения сигналов с чувствительных элементов и выделяют из них признаки, свойственные нарушителю, сравнивают их значения с установленной величиной и по результатам сравнения определяют момент выдачи сигнала тревоги, отличающийся тем, что сформированные извещателем сигналы подвергают дополнительной обработке с использованием алгоритмов адаптивной нелинейной фильтрации (АНФ), в результате которой определяют косвенные оценки дисперсии формирующего шума  , характеризующей мощность внешнего возмущения,
, характеризующей мощность внешнего возмущения,
которая является косвенным информационным признаком импульсного воздействия нарушителя на чувствительный элемент извещателя, приводящего к изменению его выходного сигнала, затем используют вычисленные косвенные оценки дисперсии формирующего шума  , где k - индекс наблюдаемого временного отсчета, а (k-1) - индекс предшествующего временного отсчета измерений, которые используют в качестве информационного признака при формировании сигнала оповещения о нарушении, формируемого на основе сравнения полученных оценок дисперсии формирующего шума
, где k - индекс наблюдаемого временного отсчета, а (k-1) - индекс предшествующего временного отсчета измерений, которые используют в качестве информационного признака при формировании сигнала оповещения о нарушении, формируемого на основе сравнения полученных оценок дисперсии формирующего шума  с выбранными порогами, u1, u2 и u3, где u1 - порог, ниже которого вычисленные значения оценок дисперсии формирующего шума, рассматривают как помеховый фон, не связанный с нарушением охраняемых рубежей объектов и границ, при этом нахождение сформированного сигнала, характеризующего изменение оценок дисперсии формирующего шума между порогами u1 и u2 рассматривают, как помехи, которые связаны с повышенным влиянием внешних воздействий на чувствительный элемент извещателей, но не свидетельствуют о нарушении зоны охраны, и только факт превышения сформированным сигналом оценок дисперсии формирующего шума порога u3 используют для формирования сигнала тревоги, при этом для повышения вероятности обнаружения нарушителя по вычисленным оценкам дисперсии формирующего шума используют различные алгоритмы компенсации помех в сформированном сигнале, характеризующем изменение во времени оценок дисперсии формирующего шума.
с выбранными порогами, u1, u2 и u3, где u1 - порог, ниже которого вычисленные значения оценок дисперсии формирующего шума, рассматривают как помеховый фон, не связанный с нарушением охраняемых рубежей объектов и границ, при этом нахождение сформированного сигнала, характеризующего изменение оценок дисперсии формирующего шума между порогами u1 и u2 рассматривают, как помехи, которые связаны с повышенным влиянием внешних воздействий на чувствительный элемент извещателей, но не свидетельствуют о нарушении зоны охраны, и только факт превышения сформированным сигналом оценок дисперсии формирующего шума порога u3 используют для формирования сигнала тревоги, при этом для повышения вероятности обнаружения нарушителя по вычисленным оценкам дисперсии формирующего шума используют различные алгоритмы компенсации помех в сформированном сигнале, характеризующем изменение во времени оценок дисперсии формирующего шума.
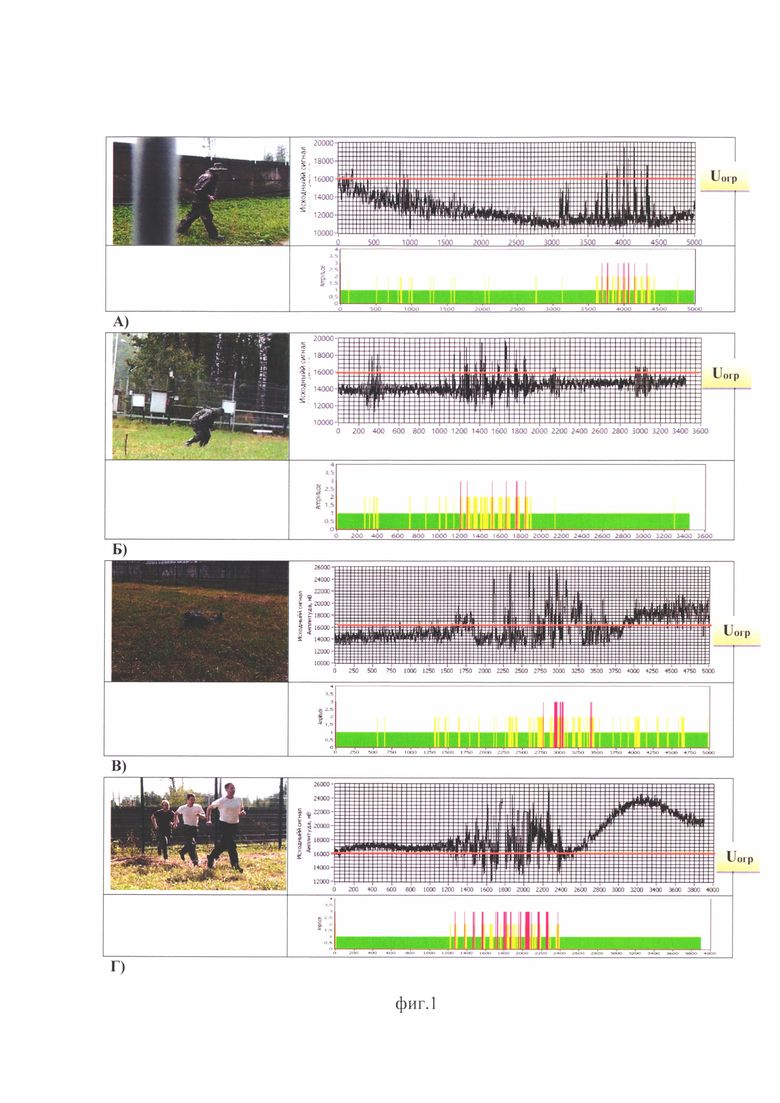
Иллюстрации, показывающие технический эффект, получаемый при использовании способа [1] приведены на фиг. 1 (А, Б, В, Г). Там же, слева, представлены различные способы (А, Б, В, Г), который использует нарушитель, для преодоления зоны охраны (ЗО), а справа - формируемый сигнал u(t), который получают в существующей практике при использовании ВОК в качестве распределенного чувствительного элемента (ЧЭ). При этом выделение полезного сигнала на фоне помех осуществляют с использованием установленного порога ограничений - Uогр. Проблема, которую необходимо решить, заключается в том, какому значению формируемого сигнала u(t) должно соответствовать Uогр. Мало того, что этому выбору, как следует из графиков, приведенных на фиг. 1, не способствуют особенности формируемого сигнала u(t), который, в общем случае, представляет собой нестационарный случайный процесс с изменяющимися во времени осредненными значениями, представляющими собой тренд. Так он еще и зависит от способа преодоления 30, который использует нарушитель. Если выставленный порог Uогр для случая одиночного нарушителя, преодолевающего 30, пешком, как показано на фиг. 1(А, Б), может оказаться приемлемым, то он приведет к состоянию, которое определяется, как формирование ложных тревог, в случае пересечения 30 ползком или в составе группы нарушителей фиг. 1(В, Г). Поэтому сигнализационная надежность такого варианта работы технических средств охраны (ТСО) не будет отвечать современным требованиям и моделям угроз. Использование в результате применения способа [1] полученных оценок дисперсии формирующего шума  с выбранными порогами, u1, u2 и u3, как этого показано на фиг. 1 (А, Б, В, Г) на графиках, приведенных внизу под сигналами, формируемыми датчиками, сенсорами и извещателями на основе распределенного ЧЭ в виде ВОК, позволяет повысить сигнализационную надежность датчиков, сенсоров и извещателей. При этом под сигнализационной надежностью понимается одновременное выполнение предъявляемых требований, относящихся к вероятности обнаружения нарушителя Рн и к интервалам времени между ложными тревогами. При этом сигнал тревоги формируют при превышении значений дисперсий формирующего шума
с выбранными порогами, u1, u2 и u3, как этого показано на фиг. 1 (А, Б, В, Г) на графиках, приведенных внизу под сигналами, формируемыми датчиками, сенсорами и извещателями на основе распределенного ЧЭ в виде ВОК, позволяет повысить сигнализационную надежность датчиков, сенсоров и извещателей. При этом под сигнализационной надежностью понимается одновременное выполнение предъявляемых требований, относящихся к вероятности обнаружения нарушителя Рн и к интервалам времени между ложными тревогами. При этом сигнал тревоги формируют при превышении значений дисперсий формирующего шума  последнего порога u3.
последнего порога u3.
Из приведенных на фиг. 1 иллюстраций следует, что основной технический положительный эффект от применения способа [1] заключается в том, что значения дисперсий формирующего шума  оказываются малочувствительными к изменению медленноменяющейся составляющей нестационарного случайного процесса, представляющей собой тренд uT(t). Однако при этом наблюдается повышенная чувствительность к импульсным помехам, в результате чего растет количество откликов, которые превышают выставленный порог ограничения u2 (фиг. 1 (А, Б, В, Г)). Их наличие увеличивает риск формирования техническим средством охраны (ТСО) сигнала «ложной» тревоги.
оказываются малочувствительными к изменению медленноменяющейся составляющей нестационарного случайного процесса, представляющей собой тренд uT(t). Однако при этом наблюдается повышенная чувствительность к импульсным помехам, в результате чего растет количество откликов, которые превышают выставленный порог ограничения u2 (фиг. 1 (А, Б, В, Г)). Их наличие увеличивает риск формирования техническим средством охраны (ТСО) сигнала «ложной» тревоги.
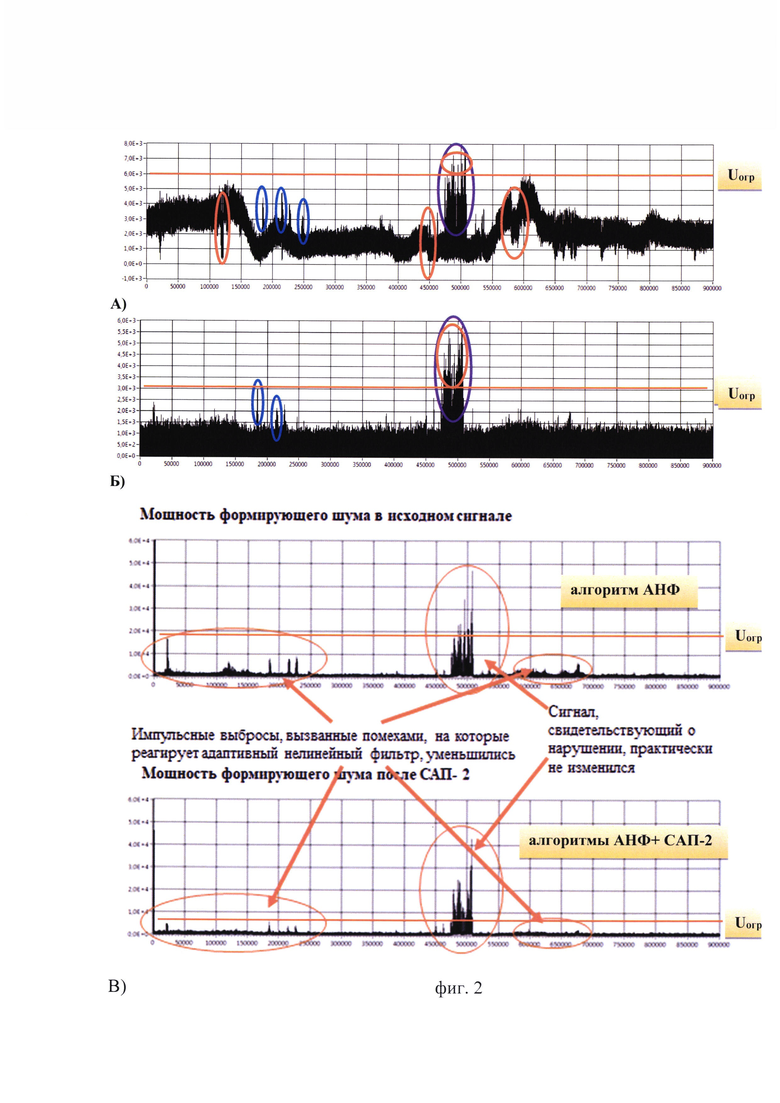
Использование способа [1] позволяет существенно уменьшить влияние низкочастотной составляющей сигнала (тренда) (фиг. 1 (А, Б, В, Г), фиг. 2(A)), формируемого на основе ВОК, используемого в качестве распределенного ЧЭ. Это связано с тем, что определяемые в результате его обработки оценки дисперсии формирующего шума  оказываются наиболее чувствительными по отношению к выбросам нестационарного случайного процесса, к которому относится и сигнал, формируемый техническим средством охраны (ТСО), использующим ВОК в качестве распределенного ЧЭ. При этом выставленные три порога u1, u2 и u3, которые используют для принятия решения о наличии нарушителя, определяют реакцию оценок дисперсии формирующего шума
оказываются наиболее чувствительными по отношению к выбросам нестационарного случайного процесса, к которому относится и сигнал, формируемый техническим средством охраны (ТСО), использующим ВОК в качестве распределенного ЧЭ. При этом выставленные три порога u1, u2 и u3, которые используют для принятия решения о наличии нарушителя, определяют реакцию оценок дисперсии формирующего шума  на шум (u1), незначительные импульсные помехи (u1) и наличие нарушителя (u3) (фиг. 1 (А, Б, В, Г)).
на шум (u1), незначительные импульсные помехи (u1) и наличие нарушителя (u3) (фиг. 1 (А, Б, В, Г)).
Также проведенные углубленные теоретические и экспериментальные исследования показали, что для повышения сигнализационной надежности датчиков, сенсоров и извещателей, чувствительным элементом которых является ВОК.
Для этого необходимо текущую оценку дисперсии формирующего шума  определять не по формуле (10), используемой в прототипе [6]:
определять не по формуле (10), используемой в прототипе [6]:

где τk - представляет собой интервал между двумя последовательными временными отсчетами (tk и tk-1) измерений значений контролируемого и обрабатываемого сигнала, формируемого извещателями: τk=tk-tk-1, k - номер (индекс) временного отсчета;
 - оценка максимальной дисперсии случайных отклонений ε(k) измеренного значения у(k) от прогнозируемой оценки х(k/k-1):
- оценка максимальной дисперсии случайных отклонений ε(k) измеренного значения у(k) от прогнозируемой оценки х(k/k-1):


где  - минимальная дисперсия случайной помехи, а α и β - весовые коэффициенты рекурсивного фильтра экспоненциального скользящего среднего;
- минимальная дисперсия случайной помехи, а α и β - весовые коэффициенты рекурсивного фильтра экспоненциального скользящего среднего;
 - оценка максимальной дисперсии изменений медленно меняющегося систематического смещения ξ(k),
- оценка максимальной дисперсии изменений медленно меняющегося систематического смещения ξ(k),
а на основе суммирования полученных значений с весами α и β, которые устанавливают для усредняющего фильтра:

В этом заключаются новые изменения, которые составляют основу сущностных характеристик предлагаемого изобретения при использовании методов АНФ. Также сущностные характеристики изобретения заключаются в предварительном использовании операций структурно-алгоритмических преобразований, называемых в [7] САП-2 и в определении единой оптоволоконной технологии повышения сигнализационной надежности сигналов, формируемых рефлектометрами.
Также проведенные исследования показали, что использование только одного способа [6] при предварительной обработке сигнала, формируемого ТСО, может оказаться недостаточным для обеспечения требуемых показателей сигнализационной надежности, определяемыми вероятностью обнаружения нарушителя (Рн ≥ 0,95) и временным интервалом ΔТлт между сигналами «ложной» тревоги (ΔТлт ≥ 2000 час). Поэтому требуется его комплексирование с другими способами.
Также известным является «Способ оперативно-технической охраны рубежей объектов и границ», патент RU №2674809, заявка №2017124869 с приоритетом от 12.07.2017 г., опубл. 13.12.2018 г., бюл. №35 [7]. В нем, как в способе [1], сигнализационную надежность датчиков, сенсоров и извещателей также повышают за счет предварительной обработки сигналов, формируемых на их выходе, с элементами адаптации к различным условиям их применения и реализуемого при этом искусственного интеллекта, способствующего последовательному увеличению информационных признаков нарушений в исходных формируемых физических сигналах. При этом предварительную обработку сигналов, формируемых датчиками, сенсорами и извещателями осуществляют с использованием конвейерного принципа на основе распределенных структурно-алгоритмических преобразований (САП-i), i=1,2,3,4 - их порядковых номер реализации. При этом наиболее подходящим для реализации предлагаемой идеи совместного использования способов [6 и 7] является структурно-алгоритмическое преобразование (САП-2).
Способ [7] по п. 1, отличается тем, что на втором этапе распределенных САП (САП-2), входящих в состав (САП-i), i=1,2,3,4…, последовательность импульсных сигналов, сформированную каждым из однотипных извещателей, инвертируют и сдвигают относительно исходной на время Δτk, равное половине предполагаемого времени Тпрk, которое потребуется для пересечения нарушителем охраняемого участка территории или зоны охраны, на которой установлены извещатели технических средств охраны (Δτk ≈ 1/2Тпрk), которую затем суммируют с исходной последовательностью импульсных сигналов, результаты суммирования дифференцируют для дополнительного подавления шумового и помехового фона, в результате чего повышают соотношение сигнал/шум и сигнал/(шум + помеха), а задержкой Δτk, которая может изменяться при повторе приведенных операций обработки, включая возможность параллельной обработки с различными значениями Δτk, соответствующими определенным признакам нарушений, которые были получены на предварительном этапе обучения адаптивных и интеллектуальных технических средств охраны, на основе чего вводят дополнительный информационный признак - Δτk, позволяющий отличить факт пересечения охраняемого участка территории, на которой установлены извещатели технических средств охраны, от других помех, вызванных при использовании сейсмических пьезоэлектрических извещателей и геофонов падением веток, камней, снежных комков, проездом транспортных средств вблизи от охраняемой территории и важных объектов, влиянием дождей и ливней на радиолучевые технические средства охраны, сформированный при этом дополнительный информационный признак Δτk и время Ти превышения импульсным сигналом установленного для него одного или нескольких пороговых уровней, в том числе и выставленных одновременно для идентификации различных событийных явлений, используют для классификации предполагаемого нарушения - одиночного, группового, определения предполагаемого способа преодоления охранной зоны - на транспорте, бегом, шагом, ползком, перекатом.
Основной технический эффект от предварительной обработки сигналов, формируемых датчиками, сенсорами и извещателями, проявляется, как показано на фиг. 2(Б), в том, что использование алгоритма САП-2 приводит к уменьшению влияния тренда на выбор порогов ограничений (Uогр) и, как следствие этого, к увеличению энергетического признака выделяемого сигнала о нарушении зоны охраны. В результате повышается сигнализационная надежность ТСО.
Недостаток способа [2], заключается в том, что в его конвейерной процедуре предварительной обработки отсутствуют операции, которые связаны с реализацией адаптивной нелинейной фильтрации сигналов, формируемых датчиками, сенсорами и извещателями. Недостаток также связан с необходимостью учета специфических особенностей сигналов, формируемых рефлектометрами при использовании ВОК в качестве ЧЭ.
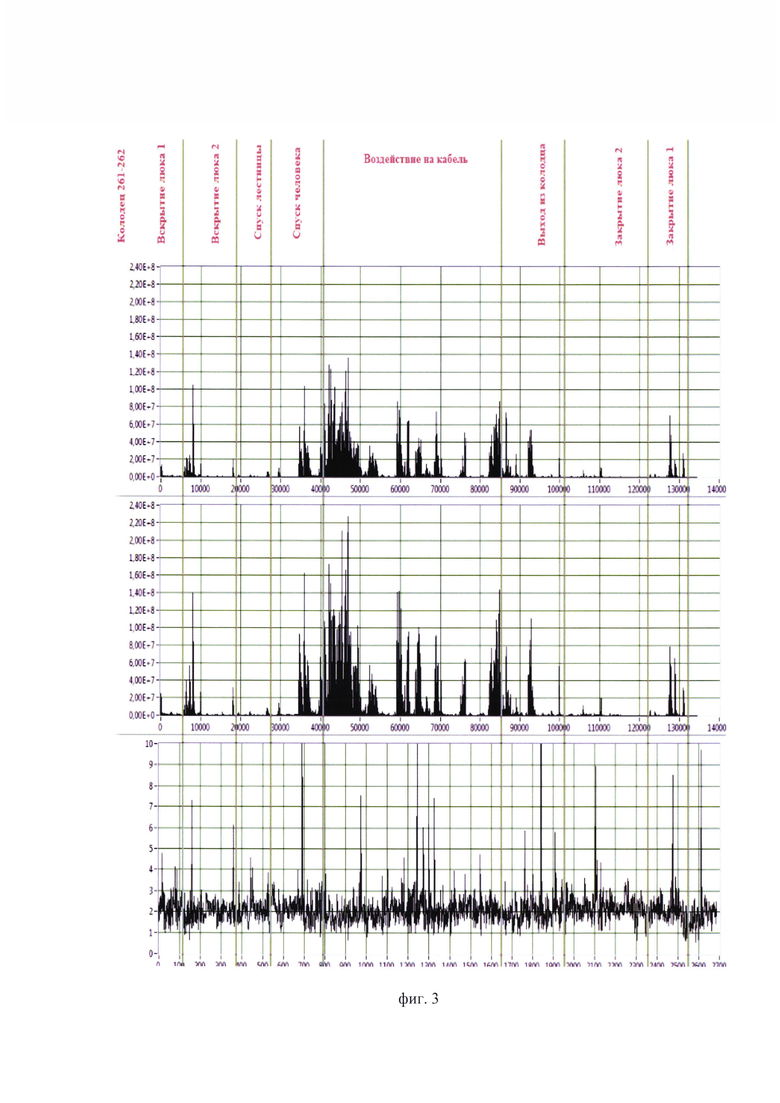
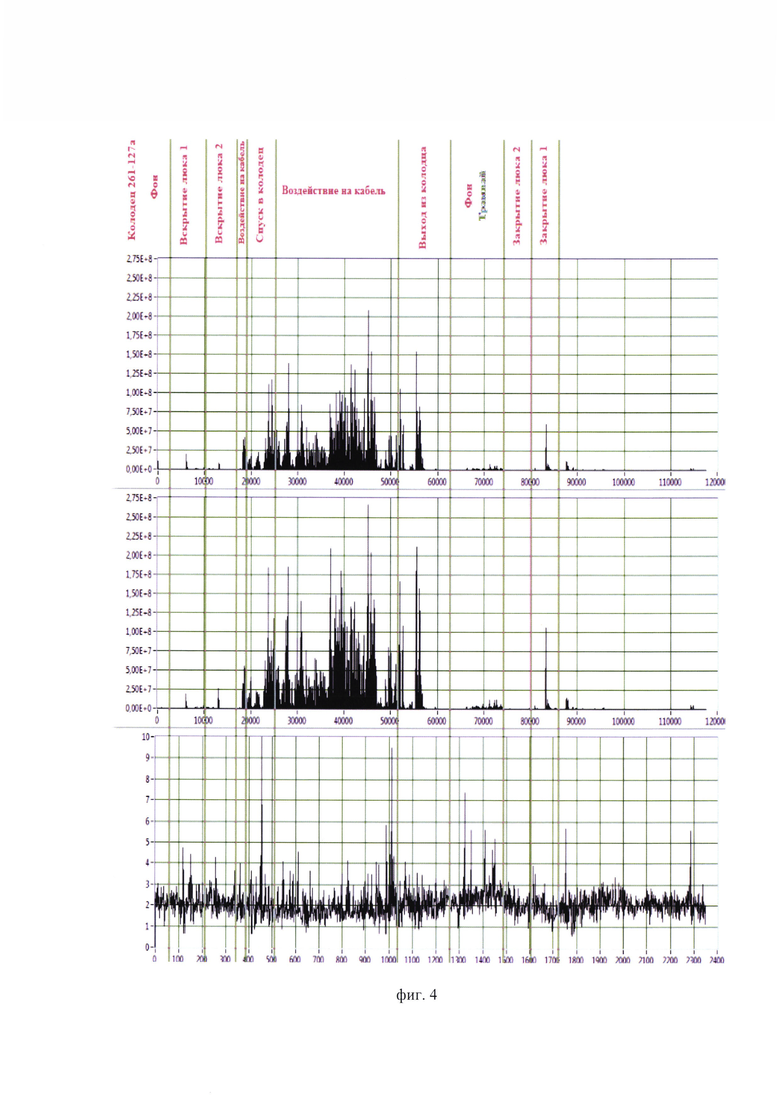
На фиг. 2(B) и на фиг. 3 показаны различные варианты совместного использования алгоритмов САП-2 и адаптивной нелинейной фильтрации (АНФ). На фиг. 2(B) представлен случай, когда алгоритм обработки на основе САП-2 используют после алгоритма АНФ. В этом случае алгоритм обработки на основе САП-2 способствует дополнительному подавлению помехового фона, в результате чего порог ограничения (Uогр) может быть установлен меньшим, в результате чего энергетический признак обработанного сигнала, относящийся к факту нарушения зоны охраны становится более заметным. В то же время другой порядок использования алгоритмов обработки на основе САП-2 и АНФ, когда они следуют в записанной последовательности, приводит к более впечатляющему положительному техническому эффекту. Это продемонстрировано на иллюстрациях, приведенных на фиг. 3 и фиг. 4. Для проведения натурных экспериментальных исследований были выбраны колодцы, обеспечивающие доступ к кабельной сети в г. Москве. Такой выбор был продиктован существующими частыми случаями вырезания и воровства кабелей. На фиг. 3 и фиг. 4 показаны основные операции, которые должен совершить злоумышленник: вскрыть люки №1 и №2, закрывающие вход в кабельный колодец; 2) спустить лестницу и 3) спуститься самому. На фиг. 3 и фиг. 4 приведены предварительно обработанные сигналы, которые формирует ВОК, находящийся рядом с другими кабелями и используемый в качестве ЧЭ. При этом верхнее графическое отображения отклика воображаемого ТСО соответствует результатам предварительной обработки распределенного датчика, сенсора или извещателя при использовании алгоритма АНФ. Вариант его представления на среднем графике получен для случая, когда вначале сигнал, формируемый рефлектометром, был подвергнут обработке на основе алгоритма САП-2, а затем полученный промежуточный вариант был улучшен при использовании алгоритма АНФ. Нижний график, приведенный на фиг. 3 и фиг. 4 показывает, насколько при этом изменилось отношения оценок дисперсий формирующего шума. Он свидетельствует о том, что при совместном использовании алгоритмов САП-2 + АНФ и АНФ, в отдельности, отношения оценок дисперсий формирующего шума увеличились, в среднем, в 2 раза.
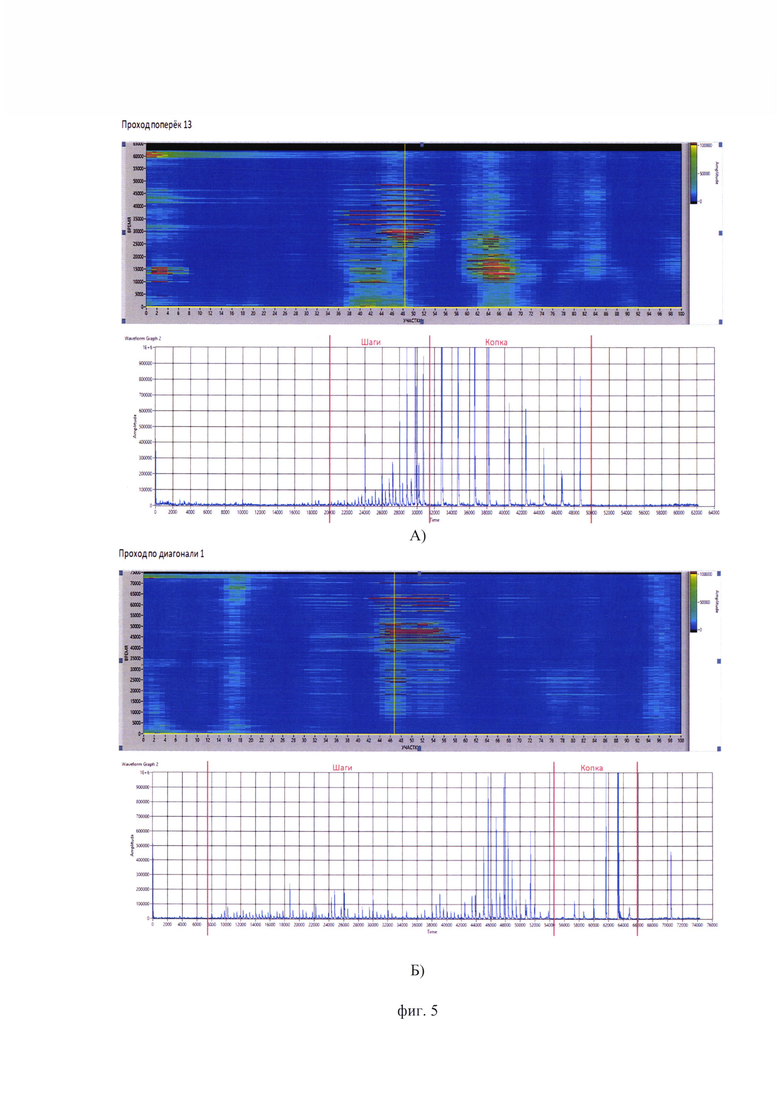
При этом стали более заметные воздействия, которые идентифицируются, как помеха, и были вызваны проезжающим в 10 метрах от колодца трамваем (фиг. 4). Отличительные особенности формирования сигналов рефлектометром, который является измерительным прибором, заключаются в том, что он позволяет получать результаты в виде трехмерной графики, как это показано на фиг. 5(A) и фиг. 5(Б). При этом трехмерной графики представлены в верхней части, где приведены трехмерные изображения сигналов, формируемых рефлектометрами. Третья ось трехмерной графики, идущая вверх, представлена в виде различных цветов. С правой стороны графиков приведено соответствие между цветами и соответствующими им числами. Двумерные графики, приведенные на фиг. 5(A) и фиг. 5(Б) внизу, соответствуют сечению трехмерных графиков, называемых когнитивными, которое обозначено сплошной светлой линией. В результате этого получают развертку трехмерного изображения в виде двумерного графика (фиг. 5(A) и фиг. 5(Б) внизу), где представлены результаты предварительной обработки, полученные при использовании предлагаемого способа.
Поэтому на графиках (фиг. 5(A) и фиг. 5(Б) внизу) четко видны: по оси ординат -амплитуда отклика от воздействия на ЧЭ, в качестве которого используют ВОК, а по оси абсцисс - временная их последовательность. В результате этого появляется возможность идентификации происходящих событий: видны отображения шагов, отличающиеся периодичностью следования импульсов, а также результаты работы лопатой, проявляющиеся в виде определенной нерегулярной последовательности импульсов (фиг. 5(A) и фиг. 5(Б) внизу). Если бы обработки не было, то импульсы были бы нечеткими, в результате чего увеличивался бы и показатель неопределенности идентификации.
Сущностные характеристики предлагаемого изобретения заключаются в том, что неопределенность идентификации н интерпретации наблюдаемой последовательности импульсных сигналов существенно уменьшается.
Последовательность операций над материальными объектами, которые представлены дискретными значениями измеренного значения у(k) от прогнозируемой оценки х(k/k-1), определяют, как:
1) последовательность импульсных сигналов, сформированную в каждом временном сечении когнитивного графика (фиг. 5(A) и фиг. 5(Б) вверху), инвертируют и сдвигают относительно исходной на заранее определенное время задержки Δτk;
2) затем ее суммируют с исходной последовательностью импульсных сигналов, результаты суммирования дифференцируют для дополнительного подавления шумового и помехового фона, в результате чего повышают соотношение сигнал/шум и сигнал/(шум + помеха) (при этом задержкой Δτk, которая может изменяться при повторе приведенных операций обработки, включая возможность параллельной обработки с различными значениями Δτk, обеспечивают возможность наилучшей подстройки (автоматической адаптации) к наблюдаемой ситуации;
3) осуществляют прогнозирование значения контролируемого параметра и дисперсий погрешностей оценок:


4) находят отклонения ε(k) прогнозируемой оценки от измеренного значения и оценки максимальной дисперсии  случайных отклонений
случайных отклонений


где  - минимальная дисперсия формирующего шума, α, β - весовые коэффициенты рекурсивного фильтра скользящего среднего;
- минимальная дисперсия формирующего шума, α, β - весовые коэффициенты рекурсивного фильтра скользящего среднего;
5) производят расчет текущей оценки медленно меняющегося систематического смещения и его дисперсии 


6) определяют текущую оценку дисперсии (мощности) формирующего шума

7) осуществляют прогнозирование уточненной дисперсий погрешностей оценок:

8) вычисляют коэффициенты усиления:

9) производят расчет текущих оценок контролируемого параметра:

10) уточняют оценки дисперсии случайной помехи, присутствующей в результатах измерений из-за не точного выбора частоты опроса контролируемого параметра:


где αν, βν - весовые коэффициенты рекурсивного фильтра скользящего среднего, исключают.
11) выполняют сравнение оценки мощности формирующего шума  с априорно заданными пороговыми уровнями uj,
с априорно заданными пороговыми уровнями uj,  и формируют сигналы оповещения о воздействии помех и нарушителе:
и формируют сигналы оповещения о воздействии помех и нарушителе:


М


Приведенная последовательность операций позволяет перейти к описанию формулы изобретения.
Способ оперативно-технической охраны рубежей объектов и границ, основанный на использовании волоконно-оптических кабелей в качестве распределенного чувствительного элемента и рефлектометров, составляющих основу построения волоконно-оптических технических средств охраны (ВОТСО), и формировании ими сигналов, по которым идентифицируют факт нарушения зоны охраны, из них выделяют признаки, связанные с обнаружением нарушителя, сравнивают их значения с установленной величиной в виде порогов сравнения и по результатам сравнения определяют момент выдачи сигнала тревоги, отличающийся тем, что сигналы, сформированные волоконно-оптическими техническими средствами охраны, подвергают дополнительной обработке с использованием алгоритмов структурно-алгоритмических преобразований (САП-2) и затем адаптивной нелинейной фильтрации (АНФ), при этом вначале устраняют или уменьшают в сигнале, сформированном датчиком, сенсором или извещателем низкочастотную составляющую (тренд), а затем используют алгоритм адаптивной нелинейной фильтрации (АНФ), в результате чего определяют косвенные оценки дисперсии формирующего шума  , характеризующей мощность внешнего возмущения, которая является косвенным информационным признаком импульсного воздействия нарушителя на чувствительный элемент датчика, сенсора или извещателя, приводящего к изменению его выходного сигнала, затем используют вычисленные косвенные оценки дисперсии формирующего шума
, характеризующей мощность внешнего возмущения, которая является косвенным информационным признаком импульсного воздействия нарушителя на чувствительный элемент датчика, сенсора или извещателя, приводящего к изменению его выходного сигнала, затем используют вычисленные косвенные оценки дисперсии формирующего шума  , где k - индекс наблюдаемого временного отсчета, а (k-1) - индекс предшествующего временного отсчета измерений, которые используют в качестве информационного признака при формировании сигнала оповещения о нарушении, формируемого на основе сравнения полученных оценок дисперсии формирующего шума
, где k - индекс наблюдаемого временного отсчета, а (k-1) - индекс предшествующего временного отсчета измерений, которые используют в качестве информационного признака при формировании сигнала оповещения о нарушении, формируемого на основе сравнения полученных оценок дисперсии формирующего шума  , которые получают на основе суммирования ранее полученных значений с весами α и β, которые устанавливают для усредняющего фильтра:
, которые получают на основе суммирования ранее полученных значений с весами α и β, которые устанавливают для усредняющего фильтра:  вычисленные обновленные значения дисперсии формирующего шума
вычисленные обновленные значения дисперсии формирующего шума  сравнивают с выбранными порогами, u1, u2 и u3, где u1 - порог, ниже которого вычисленные значения оценок дисперсии формирующего шума, рассматривают как помеховый фон, не связанный с нарушением охраняемых рубежей объектов и границ, при этом нахождение сформированного сигнала, характеризующего изменение оценок дисперсии формирующего шума между порогами u1 и u2 рассматривают, как помехи, которые связаны с повышенным влиянием внешних воздействий на чувствительный элемент в виде ВОК, но не свидетельствуют о нарушении зоны охраны, и только факт превышения сформированным сигналом оценок дисперсии формирующего шума порога u3 используют для формирования сигнала тревоги, при этом для повышения вероятности обнаружения нарушителя по вычисленным оценкам дисперсии формирующего шума используют различные алгоритмы компенсации помех в сформированном сигнале, характеризующем изменение во времени оценок дисперсии формирующего шума.
сравнивают с выбранными порогами, u1, u2 и u3, где u1 - порог, ниже которого вычисленные значения оценок дисперсии формирующего шума, рассматривают как помеховый фон, не связанный с нарушением охраняемых рубежей объектов и границ, при этом нахождение сформированного сигнала, характеризующего изменение оценок дисперсии формирующего шума между порогами u1 и u2 рассматривают, как помехи, которые связаны с повышенным влиянием внешних воздействий на чувствительный элемент в виде ВОК, но не свидетельствуют о нарушении зоны охраны, и только факт превышения сформированным сигналом оценок дисперсии формирующего шума порога u3 используют для формирования сигнала тревоги, при этом для повышения вероятности обнаружения нарушителя по вычисленным оценкам дисперсии формирующего шума используют различные алгоритмы компенсации помех в сформированном сигнале, характеризующем изменение во времени оценок дисперсии формирующего шума.
Сущностные характеристики заключаются в том, что алгоритмы способов [1] и [2] объединены, образуя при этом единую последовательность операций нового изобретения, отличающуюся новизной. При этом было обеспечено существенное повышение сигнализационной надежности волоконно-оптических технических средств охраны (ВОТСО), что в иллюстративном виде отражено на фиг. 2, фиг. 3, фиг. 4 и фиг. 5.
Под сигнализационной надежностью понимают комплексный показатель Рсиг.над=F(Pобн, Δτлт), включающий в себя: вероятность обнаружения нарушителя (Робн) и продолжительность временных интервалов между ложными тревогами (Δτлт). Чем больше Робн и (Δτлт), тем выше сигнализационная надежность извещателя.
Проведенные испытания показали, что требуемые значения сигнализационной надежности волоконно-оптических технических средств охраны (ВОТСО) были достигнуты.
В качестве заключения считаем необходимым отметить следующее перспективное направление, относящееся, в том числе, и к оптоволоконным технологиям, которое связано с применением новым методов прикладной математики, составляющим основу предлагаемого изобретения и разрешения существующих многочисленных проблем.
Когнитивные графики, приведенные в верхней части фиг. 5 (А и Б), свидетельствуют о их большой насыщенности различной информацией, полезная (смысловая) часть которой искажена различного рода помеховыми воздействиями и шумами. При этом основная проблема заключается в том, как ее извлечь из общего сигнала, формируемого рефлектометром, очистить от помех, а затем, как интерпретировать полученные результаты. Если при этом учесть, что физические принципы, составляющие основу работы рефлектометров, интерферометров и других оптоволоконных приборов, всегда ограничены действующими законами, то получается, что сформулированная выше проблема должна быть решена с использованием математических методов. Они составляют основу появления различных «хитростей», позволяющих обойти многие препятствия, в том число и определяемые физическими закономерностями. Но и известными, традиционными методами прикладной математики [10,11] проблему повышения уровня отдачи от понесенных трудов по прокладке ВОК и изготовлению более совершенных оптоволоконных приборов, также не решить. Об этом, в частности, свидетельствует и мировая практика использования ВОК в качестве распределенных датчиков, сенсоров и извещателей. Нужны прикладные методы более высокого уровня, на основе которых можно, как показывают полученные результаты, обеспечить адаптацию к решению сложных прикладных задач существующих абстрактных математических теорий [6-9,12]. К их числу относится теория конечных полей Э.Галуа [7,8,12] и теория адаптивной нелинейной фильтрации [6,7-12].
Литература
1. Способ охраны периметра объекта (патент RU 2263968, МПИ7 G08B 13/02).
2. Способ охраны периметра объекта (патент 2473970 С1, МПИ7 G08B 13/02, опубликованный 27.01.2013 г., бюл. №3).
3. Способ охраны периметра объекта (патент RU 2379759, МПК G08B 13/26).
4. Телемеханическая система «ЛИЛАНА-ВИЯ» и сигнализационное заграждение с извещателем В.И Яцкова (патент RU 2379759, МПК G08B 13/26).
5. Способ охраны периметра объекта (патент RU 2491646, МПК G08C 15/08, G08B 13/26).
6. Способ оперативно-технической охраны рубежей объектов и границ (патент RU №2705770, заявка №2018119750 с приоритетом от 29.05.2018 г., опубл. 11.11.2019 г., бюл. №32).
7. Способ оперативно-технической охраны рубежей объектов и границ (патент RU №2674809, заявка №2017124869 с приоритетом от 12.07.2017 г., опубл. 13.12.2018 г., бюл. №35).
8. Способ передачи телеметрической информации, адаптированный к различным ситуациям, проявляющимся при проведении испытаний ракетно-космической техники, и система для его осуществления (патент RU №26571584, МПИ G08C19/28, опубл. 10.10.2015 г., бюл. №35).
9. Кукушкин С.С.Теория конечных полей и информатика: том. 1 Методы и алгоритмы, классические и нетрадиционные, основанные на использовании конструктивной теоремы об остатках - М: МО РФ, 2003. - 281 с.
10. Калман Р., Фалб П., Арбиб М. Очерки по математической теории систем/Пер. с англ. - Мир, 1971. - 400 с.
11. Сейдж Э., Мелс Дж. Теория оценивания и ее применение в связи и управлении/Пер. с англ. - Связь, 1976. - 496 с.
12. Кукушкин С.С., Кузнецов В.И. Анализ влияния зашумляющей помехи в результатах телеметрических измерений - М.: «Измерительная техника», 2016. №10. С. 21-23.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2018 |
|
RU2705770C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2017 |
|
RU2674809C9 |
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ЕГО СКОРОСТИ И ЦЕЛОСТНОСТИ | 2021 |
|
RU2794238C1 |
| ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА-ВИЯ" И СИГНАЛИЗАЦИОННОЕ ЗАГРАЖДЕНИЕ С ИЗВЕЩАТЕЛЕМ В.И. ЯЦКОВА | 2012 |
|
RU2491646C1 |
| ИЗВЕЩАТЕЛЬ В.И. ЯЦКОВА С ЁМКОСТНЫМ И ЛУЧЕВЫМ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2017 |
|
RU2697617C2 |
| УСТРОЙСТВО ТРЕВОЖНОГО ИЗВЕЩЕНИЯ И ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ | 2010 |
|
RU2437156C1 |
| Система виброакустических измерений и система контроля местоположения поезда | 2023 |
|
RU2814181C1 |
| Способ комбинирования технических средств обнаружения для охраны периметров и территорий объектов | 2018 |
|
RU2697622C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕСАНКЦИОНИРОВАННЫХ РАБОТ ПО ДОСТУПУ К ПОДЗЕМНЫМ ТРУБОПРОВОДАМ | 2013 |
|
RU2576730C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ, ПРЕОДОЛЕВАЮЩЕГО СЕТЧАТОЕ ОГРАЖДЕНИЕ ОБЪЕКТА | 2015 |
|
RU2617666C2 |
Изобретение относится к области волоконно-оптической метрологии и технических средств охраны (ТСО) важных объектов и границ на основе извещателей, датчиков или сенсоров, использующих в качестве чувствительного элемента волоконно-оптический кабель (ВОК), а в качестве измерительных средств - рефлектометры и способы получения виброакустической измерительной информации. Технический результат состоит: 1) в повышении сигнализационной надежности технических средств охраны; 2) в получении дополнительной информации, которая содержится в сигналах, формируемых рефлектометрами. Способ оперативно-технической охраны рубежей объектов и границ, основанный на использовании волоконно-оптических кабелей в качестве распределенного чувствительного элемента и рефлектометров, составляющих основу построения волоконно-оптических технических средств охраны (ВОТСО), и формировании ими сигналов, по которым идентифицируют факт нарушения зоны охраны, из них выделяют признаки, связанные с обнаружением нарушителя, сравнивают их значения с установленной величиной в виде порогов сравнения и по результатам сравнения определяют момент выдачи сигнала тревоги, отличающийся тем, что сигналы, сформированные волоконно-оптическими техническими средствами охраны, подвергают дополнительной обработке с использованием алгоритмов структурно-алгоритмических преобразований (САП-2) и затем адаптивной нелинейной фильтрации (АНФ), при этом вначале устраняют или уменьшают в сигнале, сформированном датчиком, сенсором или извещателем низкочастотную составляющую (тренд), а затем используют алгоритм адаптивной нелинейной фильтрации. 5 ил.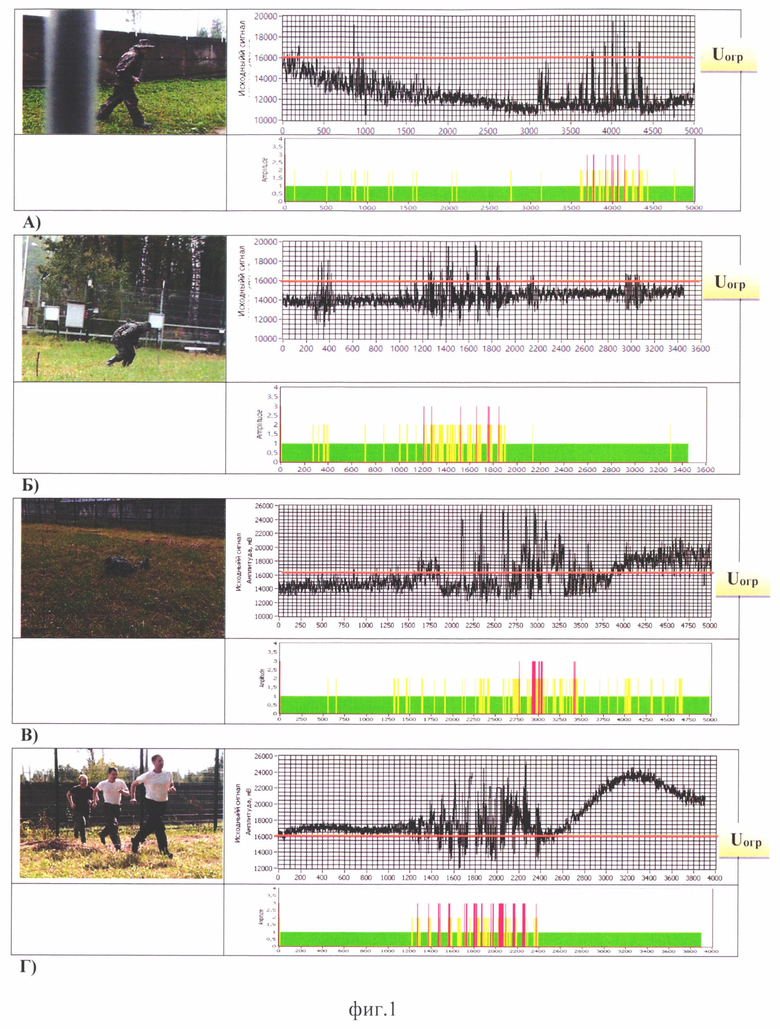
Способ оперативно-технической охраны рубежей объектов и границ, основанный на использовании волоконно-оптических кабелей в качестве распределенного чувствительного элемента и рефлектометров, составляющих основу построения волоконно-оптических технических средств охраны (ВОТСО), и формировании ими сигналов, по которым идентифицируют факт нарушения зоны охраны, из них выделяют признаки, связанные с обнаружением нарушителя, сравнивают их значения с установленной величиной в виде порогов сравнения и по результатам сравнения определяют момент выдачи сигнала тревоги, отличающийся тем, что сигналы, сформированные волоконно-оптическими техническими средствами охраны, подвергают дополнительной обработке с использованием алгоритмов структурно-алгоритмических преобразований (САП-2) и затем адаптивной нелинейной фильтрации (АНФ), при этом вначале устраняют или уменьшают в сигнале, сформированном датчиком, сенсором или извещателем низкочастотную составляющую (тренд), а затем используют алгоритм адаптивной нелинейной фильтрации (АНФ), в результате чего определяют косвенные оценки дисперсии формирующего шума  , характеризующей мощность внешнего возмущения, которая является косвенным информационным признаком импульсного воздействия нарушителя на чувствительный элемент датчика, сенсора или извещателя, приводящего к изменению его выходного сигнала, затем используют вычисленные косвенные оценки дисперсии формирующего шума
, характеризующей мощность внешнего возмущения, которая является косвенным информационным признаком импульсного воздействия нарушителя на чувствительный элемент датчика, сенсора или извещателя, приводящего к изменению его выходного сигнала, затем используют вычисленные косвенные оценки дисперсии формирующего шума  , где k - индекс наблюдаемого временного отсчета, а (k-1) - индекс предшествующего временного отсчета измерений, которые используют в качестве информационного признака при формировании сигнала оповещения о нарушении, формируемого на основе сравнения полученных оценок дисперсии формирующего шума
, где k - индекс наблюдаемого временного отсчета, а (k-1) - индекс предшествующего временного отсчета измерений, которые используют в качестве информационного признака при формировании сигнала оповещения о нарушении, формируемого на основе сравнения полученных оценок дисперсии формирующего шума  , которые получают на основе суммирования ранее полученных значений с весами α и β, которые устанавливают для усредняющего фильтра:
, которые получают на основе суммирования ранее полученных значений с весами α и β, которые устанавливают для усредняющего фильтра:  вычисленные обновленные значения дисперсии формирующего шума
вычисленные обновленные значения дисперсии формирующего шума  сравнивают с выбранными порогами, u1, u2 и u3, где u1 - порог, ниже которого вычисленные значения оценок дисперсии формирующего шума, рассматривают как помеховый фон, не связанный с нарушением охраняемых рубежей объектов и границ, при этом нахождение сформированного сигнала, характеризующего изменение оценок дисперсии формирующего шума между порогами u1 и u2 рассматривают, как помехи, которые связаны с повышенным влиянием внешних воздействий на чувствительный элемент в виде ВОК, но не свидетельствуют о нарушении зоны охраны, и только факт превышения сформированным сигналом оценок дисперсии формирующего шума порога u3 используют для формирования сигнала тревоги, при этом для повышения вероятности обнаружения нарушителя по вычисленным оценкам дисперсии формирующего шума используют различные алгоритмы компенсации помех в сформированном сигнале, характеризующем изменение во времени оценок дисперсии формирующего шума.
сравнивают с выбранными порогами, u1, u2 и u3, где u1 - порог, ниже которого вычисленные значения оценок дисперсии формирующего шума, рассматривают как помеховый фон, не связанный с нарушением охраняемых рубежей объектов и границ, при этом нахождение сформированного сигнала, характеризующего изменение оценок дисперсии формирующего шума между порогами u1 и u2 рассматривают, как помехи, которые связаны с повышенным влиянием внешних воздействий на чувствительный элемент в виде ВОК, но не свидетельствуют о нарушении зоны охраны, и только факт превышения сформированным сигналом оценок дисперсии формирующего шума порога u3 используют для формирования сигнала тревоги, при этом для повышения вероятности обнаружения нарушителя по вычисленным оценкам дисперсии формирующего шума используют различные алгоритмы компенсации помех в сформированном сигнале, характеризующем изменение во времени оценок дисперсии формирующего шума.
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ТРЕВОЖНОГО ИЗВЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2379759C2 |
| ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА-ВИЯ" И СИГНАЛИЗАЦИОННОЕ ЗАГРАЖДЕНИЕ С ИЗВЕЩАТЕЛЕМ В.И. ЯЦКОВА | 2012 |
|
RU2491646C1 |
| ИЗВЕЩАТЕЛЬ В.И. ЯЦКОВА С ЁМКОСТНЫМ И ЛУЧЕВЫМ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2017 |
|
RU2697617C2 |
| US 2003189487 A1, 09.10.2003. | |||

