Изобретение относится к сельскому хозяйству и может быть использовано в механизации и автоматизации технологических операций, а именно к роботизированным средствам, облегчающим сбор ягод земляники, и может быть использовано при автоматизированной уборке других низкорастущих культур.
Известны землянико-уборочные комбайны со способом сбора ягод путем счесывания (счесывающих гребенок). Известен счесывающий рабочий орган в машине для сбора земляники садовой (авторское свидетельство A01G 1908, заявлено 17.04.1972, № 1774132/30-15, авторы Ш. X. Винер, В. А. Макаркин, В. С. Брик, Ю. А. Утков и А. А. Дубровский).
Основными недостатками известного устройства являются: использование отдельного энергетического средства (трактор) для передвижения машинно-тракторным агрегатом счёсывающего типа, сложное конструктивное исполнение, отсутствие возможности распознавания ягод земляники, отсутствие возможности определения спелых ягод, т.е. выполняется убор зрелых и незрелых ягод.
Наиболее близкий по технической сущности к заявленному устройству является выбранный в качестве прототипа автоматизированный агрегат для машинного сбора земляники (http://octinion.com/products/harvesting-series/strawberry-picking-robot), состоящий из платформы с опорными колесами, манипулятора, вращающего вокруг оси платформы, устройства сбора для фиксации и отрыва земляники садовой, системы питания, тары для складирования урожая, бортового контроллера, системы технического зрения.
Принцип сбора описанного устройства заключается в отрыве плода (земляники садовой) от плодоножки путем захвата устройством сбора. Поиск ягод выполняется с применением технического зрения.
Недостатком известного устройства является низкая производительность сбора ягод, использование в тепличных условиях.
Технической задачей предлагаемого устройства является повышение производительности агрегата путем увеличения скорости сбора и применения системы транспортировки ягод в тару.
Поставленная техническая задача достигается тем, что у автоматизированного агрегата для машинного сбора урожая земляники, содержащего платформу с опорными колесами, манипулятор, вращающийся вокруг ее оси, устройство сбора для фиксации и среза земляники, систему питания, тару для складирования урожая и систему технического зрения, согласно изобретению, платформа выполнена составной, передняя и задняя части которой установлены с возможностью поворота относительно друг друга, на передней части установлены бортовой контроллер, система технического зрения, манипулятор и устройство сбора плодов, выполненное в виде двух полых цилиндров с резцами (зубьями), на задней части платформы - система питания, тара для складирования урожая, между передней и задней частями платформы установлена система транспортировки плодов из устройства сбора в тару.
Изобретение поясняется чертежами.
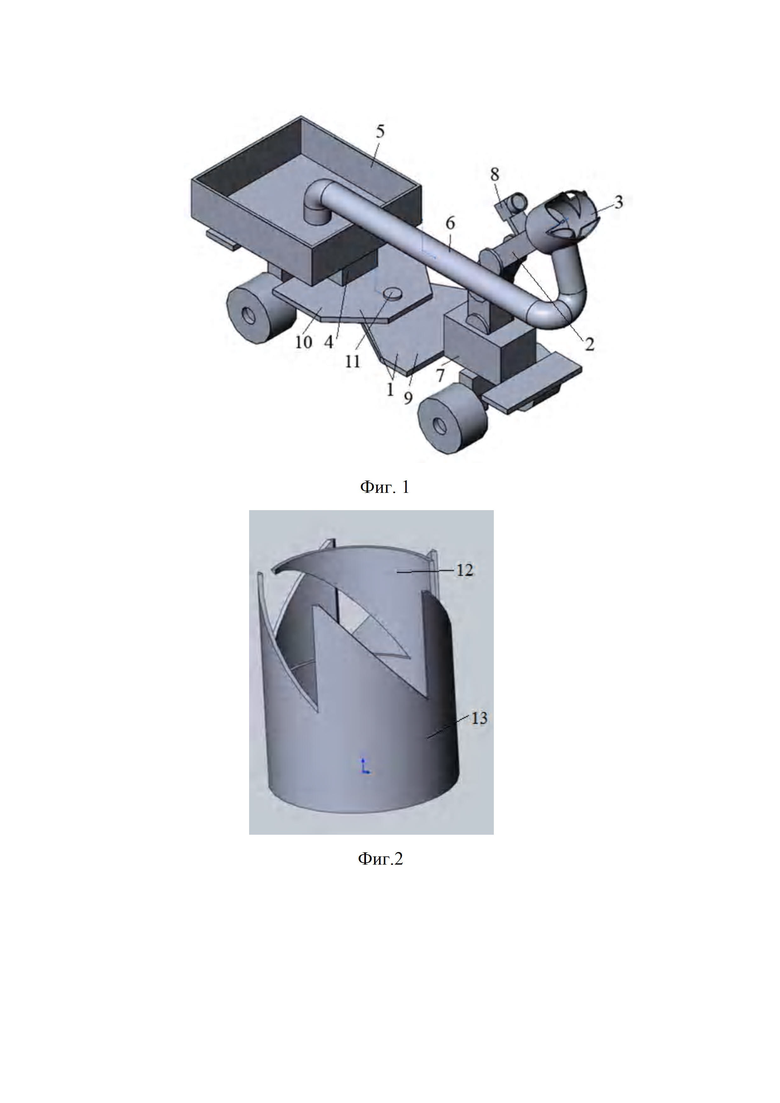
На фиг. 1 схематично представлен автоматизированный агрегат для сбора ягод земляники; на фиг. 2 представлен общий вид рабочего органа.
Автоматизированный агрегат для сбора ягод земляники садовой содержит составную платформу 1 с опорными колесами, манипулятор 2, вращающийся вокруг оси платформы 1 с шестью степенями свободы с сервоприводами для изменения угла наклона относительно плоскости крепления элементов манипулятора 2, устройства сбора 3 для фиксации и среза земляники садовой, систему питания 4, тару 5 для складирования урожая, систему транспортировки урожая 6, связанную с одной стороны с устройством сбора 3 плодов, с другой стороны с бортом тары 5, бортовой контроллер 7, систему технического зрения 8.
Платформа выполнена составной и содержит переднюю 9 и заднюю 10 части, которые соединены между собой с помощью подшипника 11 для поворота относительно друг друга, что позволяет уменьшить угол поворота при развороте автоматизированного агрегата между грядами. На передней части 9 платформы 1 установлены манипулятор 2, устройство сбора плодов 3, бортовой контроллер 7, система технического зрения 8. Устройство сбора 3 плодов выполнено в виде двух полых коаксиальных цилиндров с резцами (зубьями), внешний цилиндр12 имеет множество резцов (зубьев) с ножами, внутренний цилиндр 13 имеет один резец с ножом. На задней части платформы 10 установлены система питания 3, тара 5 для складирования урожая. Между передней 9 и задней 10 частями платформы 1 установлена система транспортировки 6 плодов из устройства сбора 3 в тару 5 для складирования урожая.
Автоматизированный агрегат работает следующим образом.
Оператор перед началом выполнения технологического процесса заряжает систему питания 4 агрегата, устанавливает тару 5 для складирования урожая на заднюю часть 10 платформы 1, далее подается команда в бортовой контроллер 7 агрегата для начала выполнения поиска и сбора урожая согласно подготовленной карте движения. Автоматизированный агрегат двигается вдоль борозды кустов земляники со скоростью 1м/мин (~1.7 см/сек). Во время движения агрегата, с помощью алгоритмов системы технического зрения 8, выполняется поиск спелых плодов, при обнаружении спелого плода принимается решение о его сборе. Сбор ягоды выполняется следующим образом: устройство сбора подводится к ягоде так, чтобы плодоножка плода упиралась в основание резца внешнего цилиндра 12. При вращении внутреннего цилиндра 13 происходит совмещение резцов, что приводит к срезу плодоножки ягоды земляники. Далее ягода скатывается по системе транспортировки 6 из устройства сбора 3 в тару 5. Вращение относительно оси внутреннего полого цилиндра 13 выполняется с помощью сервопривода и имеет угол поворота ~150°. Затем автоматизированный агрегат переходит к поиску и сбору следующей ягоды. Сбор ягод выполняется с одной стороны борозды. Когда платформа 1 достигнет конца гряды, будет выполнен поворот с малым углом за счет составной платформы. После разворота или поворота процесс поиска и сбора ягод продолжается. Когда тара 5 наполняется ягодами, оператор заменяет ее на пустую.
Использование автоматизированного агрегата представленной конструкцией позволяет повысить производительность сбора путем увеличения скорости сбора и применения системы транспортировки ягод в тару.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ механизации и автоматизации сбора урожая на базе индивидуальных мобильных экзоскелетов | 2018 |
|
RU2698260C1 |
| ПЛАТФОРМА ДЛЯ РУЧНОЙ УБОРКИ УРОЖАЯ, ПОСАДКИ И УХОДА ЗА НИЗКОРАСТУЩИМИ КУЛЬТУРАМИ | 2009 |
|
RU2415550C1 |
| Ягодоуборочный комбайн с автоматической системой затаривания | 2019 |
|
RU2707528C1 |
| Автоматизированный агрегат магнитно-импульсной обработки садовых растений | 2018 |
|
RU2679722C1 |
| Платформа для ручного сбора урожая низкорастущих культур | 1977 |
|
SU660621A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО СБОРА ТОМАТОВ | 2022 |
|
RU2796270C1 |
| ТЕЛЕЖКА ДЛЯ СБОРА ЯГОД ЗЕМЛЯНИКИ САДОВОЙ ИНДИВИДУАЛЬНОГО ИСПОЛЬЗОВАНИЯ | 2018 |
|
RU2712688C1 |
| Платформа для сбора урожая низкорастущих культур | 1979 |
|
SU973066A1 |
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| ПЛАТФОРМА ДЛЯ РУЧНОЙ УБОРКИ ЯГОД ЗЕМЛЯНИКИ И ДРУГИХ НИЗКОРАСТУЩИХ КУЛЬТУР | 2013 |
|
RU2523500C1 |
Изобретение относится к области сельского хозяйства. Автоматизированный агрегат содержит платформу с опорными колесами, манипулятор, вращающийся вокруг ее оси, устройство сбора для фиксации и среза земляники, систему питания, бортовой контроллер, тару для складирования урожая и систему технического зрения. Платформа выполнена составной, передняя и задняя части которой установлены с возможностью поворота относительно друг друга. На передней части установлены бортовой контроллер, система технического зрения, манипулятор и устройство сбора плодов, выполненное в виде двух полых коаксиальных цилиндров с резцами-зубьями. На задней части платформы установлены система питания и тара для складирования урожая. Между передней и задней частями платформы размещена система транспортировки плодов из устройства сбора в тару. Обеспечивается повышение производительности агрегата путем увеличения скорости сбора и применения системы транспортировки ягод в тару. 2 ил.
Автоматизированный агрегат для сбора земляники садовой, содержащий платформу с опорными колесами, манипулятор, вращающийся вокруг ее оси, устройство сбора для фиксации и среза земляники, систему питания, бортовой контроллер, тару для складирования урожая и систему технического зрения, отличающийся тем, что платформа выполнена составной, передняя и задняя части которой установлены с возможностью поворота относительно друг друга, на передней части установлены бортовой контроллер, система технического зрения, манипулятор и устройство сбора плодов, выполненное в виде двух полых коаксиальных цилиндров с резцами-зубьями, на задней части платформы - система питания и тара для складирования урожая, при этом между передней и задней частями платформы размещена система транспортировки плодов из устройства сбора в тару.
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| CN 103503639 A, 15.01.2014 | |||
| KR 20150105661 A, 18.09.2015 | |||
| Машина для автоматизированного сбора плодов | 1989 |
|
SU1701160A1 |

