Изобретение относится к измерительной технике и может найти применение в системах позиционирования наземных транспортных средств.
Известен способ локализации робота в плоскости локализации [Патент РФ №2662913, 2015, МПК B25J 9/16], заключающийся в том, что получают опорную панораму, состоящую из множества RGB изображений и/или трехмерных изображений, проводят оценку ориентации робота посредством корреляции частей опорной панорамы с частями панорамы запроса и определяют оценку положения робота посредством использования итерационной технологии ближайших точек.
Вначале вычисляют локализацию (оценка координат x, у и направления движения), основанную на одометрии. Затем вычисляют ориентацию робота с помощью виртуального компаса с учетом данных первого этапа. После чего осуществляют оценку направления движения на основе совмещения образцов изображений, которое выполняют на двух пирамидах изображений. Затем выполняют оценку координат робота посредством использования итерационного способа ближайших точек (Iterative Closest Points - ICP).
Недостатком этого способа является тот факт, что потребность во множестве RGB изображений и/или трехмерных изображений существенно удорожает способ. Кроме того, увеличивается вычислительное время обработки информации.
Наиболее близким к предлагаемому изобретению по технической сути и достигаемому результату является способ навигации сельскохозяйственного транспортного средства [Патент РФ №2508622, 2015, МПК A01F 15/08, G08G 1/0968]. Способ заключается в том, что от устройства создания трехмерных изображений (стереокамеры или устройства, работающими на принципе времени пролета) получают кадры (или изображения, или картины), изображающие окружение транспортного средства в различные моменты времени при движении транспортного средства. Устанавливают отличительные признаки в кадрах и получают трехмерную информацию о них. Осуществляют подбор в пары отличительных признаков, найденных в одном кадре, с отличительными признаками, найденными в более раннем кадре. Устанавливают изменения позиции между кадрами на основе относительных положений подобранных в пары отличительных признаков в кадрах. Проводят оценку изменения направления движения и координат местоположения транспортного средства на основе изменения позиции между кадрами.
Недостатком этого способа является низкая точность вычисления позиции транспортного средства в пространстве в случае слабо изменяющегося изображения за счет того, что на изображениях плохо выявляются отличительные признаки.
Задачей данного изобретения является устранение указанного недостатка.
Это достигается тем, что в способе навигации наземного транспортного средства, заключающемся в получении кадров, изображающих окружение транспортного средства в различные моменты времени при его движении, установлении изменения позиции между кадрами, проведении оценки изменения направления движения и координат местоположения транспортного средства, после получения кадров осуществляют выделение областей размером не менее 50×50 пикселей, измеряют расстояния от транспортного средства до каждой точки этих областей. Определяют в каждой выделенной области точки (метки), имеющие минимальное расстояние до транспортного средства. Запоминают относительное положение меток в областях. Проводят поиск выделенных ранее областей на последующих кадрах изображения. Оценивают достоверность этого поиска. Измеряют расстояния от транспортного средства до определенных ранее меток. Вычисляют изменение относительного положения меток между кадрами. При этом установление изменения позиции между кадрами осуществляют на основе изменения относительного положения меток между кадрами и оценки достоверности поиска областей. Оценку же изменения направления движения и координат местоположения транспортного средства проводят с учетом изменения позиции между кадрами и расстояний до меток. Определение расстояния до точек изображения осуществляют дальномером.
Поиск выделенных областей не менее 50×50 пикселей на двух последовательных кадрах не требует большого числа неоднородностей в изображении, что позволяет с высокой степенью достоверности определить изменение положения меток и приводит к повышению точности определения изменения направления движения и координат местоположения транспортного средства в случае слабо изменяющегося изображения по сравнению с поиском пар отличительных признаков, при котором для этого случая высока вероятность неверного сопоставления отличительных признаков в пары.
Нахождение параметра определяющего достоверность поиска области позволяет в случае достоверности поиска одной из областей ниже заданного порога уменьшить весовой коэффициент влияния этой области на вычисление изменении позиции транспортного средства по совокупности областей, что практически нереализуемо при поиске отличительных признаков.
Кроме того, возможность определения расстояний до точек фиксированных областей с помощью дальномера, что затруднительно при поиске отличительных признаков из-за потребности нахождения расстояний до большого количества разбросанных по изображению точек при движении, в свою очередь, повышает точность вычисления координат.
Все это позволяет повысить точность определения направления движения и координат местоположения транспортного средства, при слабо изменяющемся изображении, примерно на 40% по сравнению с прототипом.
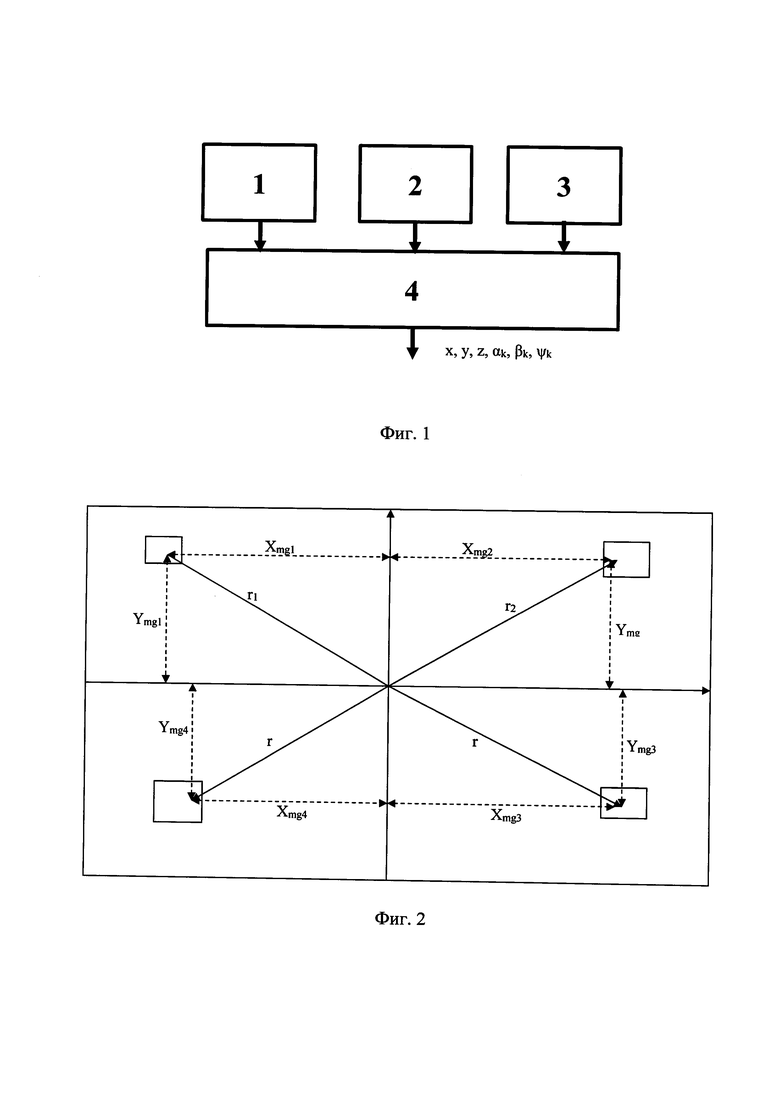
На фиг. 1 представлена схема навигационного устройства наземного транспортного средства, реализующего предлагаемый способ.
На фиг. 2 - схема выделения фиксированных областей.
Устройство содержит спутниковую навигационную систему 1, дальномер 2, видеокамеру 3 и решающее устройство 4.
Реализация предлагаемого способа осуществляется следующим образом. В зоне уверенного приема сигнала спутниковой навигационной системы 1 на основе ее данных определяют координаты и положение наземного транспортного средства, то есть xo, yo, zo, αko, βko, ψko, где
xo, yo, zo - координаты наземного транспортного средства
αko, βko, ψko - курс, тангаж и крен наземного транспортного средства. В то же время по данным с видеокамеры 3 выделяют фиксированные области размером не менее 50×50 пикселей (фиг. 2). Данные области расположены по противоположным четвертям декартовой системы, что обеспечивает сравнительно низкую ошибку определения изменений углов α и β при возникновении крена. Число областей (Nob), таким образом, кратно двум. В пределах каждой фиксированной области определяют точку (метку) с минимальным расстоянием до наземного транспортного средства. Расстояние до всех точек фиксированных областей определяют по дальномеру 2. Положения каждой метки относительно начала соответствующей фиксированной области запоминают. Координаты метки рассчитывают решающим устройством 4 по расстоянию от наземного транспортного средства до метки j-ой области, полученное с дальномера, координатам (в пикселях) метки j-ой области видеоизображения, получаемые с видеокамеры 3 и коэффициента перевода из пикселей в метры, полученного при калибровке видеокамеры 3. Затем, при входе наземного транспортного средства в зону с отсутствием сигнала либо недостоверности данных из спутниковой навигационной системы решающим устройством 4 проводят отслеживание положений фиксированных областей по текущему изображению с видеокамеры 3. Отслеживание проводят по максимуму свертки сканируемой области со специальной функцией, формируемой по цветовой характеристике пикселей при сканировании текущего видеоизображения. Положение метки в пределах отслеженной области соответствует положению в первичной области. Затем решающим устройством 4 проводят расчет текущего положения наземного транспортного средства на основе данных о расстоянии от наземного транспортного средства и координат в пикселях метки j-ой отслеженной области в текущем и предыдущем кадре видеоизображения и расчет текущих координат наземного транспортного средства через известные координаты меток отслеженных областей. После чего решающим устройством 4 осуществляют расчет оценки вероятности соответствия отслеженной области исходной фиксированной области. Если данная вероятность больше некоторой заданной доверительной вероятности, то уменьшается весовой коэффициент влияния этой области на вычисление изменении позиции транспортного средства по совокупности областей. Если отслеживаемая область выходит из заданной области обзора, то проводят выделение новой фиксированной области, находят метку и заново определяют ее координаты. Пример. Экспериментальная проверка способа была проведена в стационарных условиях. Видеокамера с известными углами (αko, βko, ψko) размещалась в точке с известными координатами (хо, уо, zo). В этом положении выделялись четыре фиксированных области размером 100×100 пикселей. С помощью лазерного дальномера определялись метки в каждой области (точки с минимальным расстоянием) и находились расстояния до меток. Камера перемещалась в новое положение так, что бы фиксированные области не выходили из области обзора камеры и отслеживались при ее перемещении с вероятностью не превышающую доверительную вероятность (Pd > 0,7). В новом положении определялись расстояния от камеры и координаты меток. По этим данным пересчитывались новые углы и координаты камеры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА КАЛИБРОВКИ КОМПЛЕКСА ИЗМЕРЕНИЯ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2592711C1 |
| СПОСОБ ПРИМЕНЕНИЯ РОБОТИЗИРОВАННОГО ТАХЕОМЕТРА И БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНОГО ОБЪЕКТА | 2023 |
|
RU2809177C1 |
| Оптико-электронная система преобразования данных изображения в элементы вектора состояния судна | 2023 |
|
RU2808873C1 |
| Способ калибровки внешних параметров видеокамер | 2021 |
|
RU2780717C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| СПОСОБ ТЕЛЕМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ И ФИКСАЦИИ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2597328C1 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОСАДКОЙ МАЛОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735196C1 |
| Способ бесконтактного управления курсором мыши | 2015 |
|
RU2618389C2 |
| СИСТЕМЫ И СПОСОБЫ ОТСЛЕЖИВАНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЦЕЛЕВОГО ОБЪЕКТА | 2014 |
|
RU2664257C2 |
Изобретение относится к измерительной технике. Способ навигации наземного транспортного средства заключается в получении кадров, изображающих окружение транспортного средства, установлении изменения позиции между кадрами, проведении оценки изменения направления движения транспортного средства. После получения кадров осуществляют выделение областей размером не менее 50×50 пикселей, измеряют расстояния от транспортного средства до каждой точки этих областей, определяют в каждой выделенной области точки (метки), запоминают относительное положение меток в областях, проводят поиск выделенных ранее областей на последующих кадрах изображения, оценивают достоверность этого поиска, измеряют расстояния от транспортного средства до определенных ранее меток, вычисляют изменение относительного положения меток между кадрами. При этом установление изменения позиции между кадрами осуществляют на основе изменения относительного положения меток между кадрами и оценки достоверности поиска областей, оценку изменения направления движения и координат местоположения транспортного средства проводят с учетом изменения позиции между кадрами и расстояний до меток, а определение расстояния до точек изображения осуществляют дальномером. Достигается повышение точности вычисления позиции транспортного средства в пространстве. 2 ил.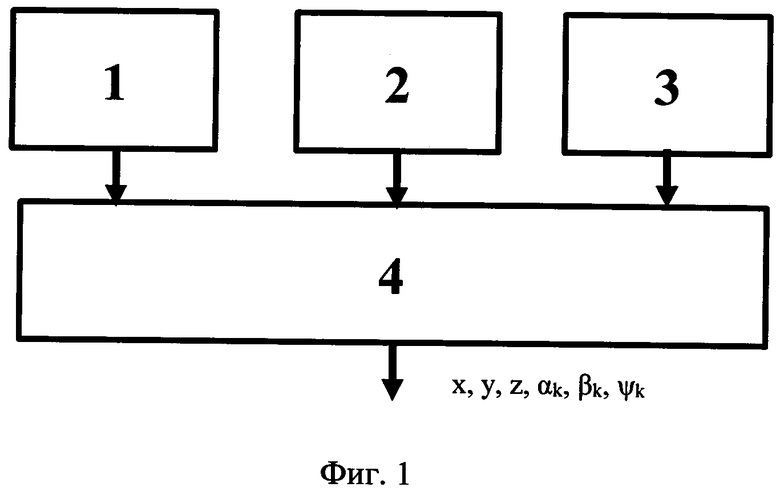
Способ навигации наземного транспортного средства, заключающийся в получении кадров, изображающих окружение транспортного средства в различные моменты времени при его движении, установлении изменения позиции между кадрами, проведении оценки изменения направления движения и координат местоположения транспортного средства, отличающийся тем, что после получения кадров осуществляют выделение областей размером не менее 50×50 пикселей, измеряют расстояния от транспортного средства до каждой точки этих областей, определяют в каждой выделенной области точки (метки), имеющие минимальное расстояние до транспортного средства, запоминают относительное положение меток в областях, проводят поиск выделенных ранее областей на последующих кадрах изображения, оценивают достоверность этого поиска, измеряют расстояния от транспортного средства до определенных ранее меток, вычисляют изменение относительного положения меток между кадрами, при этом установление изменения позиции между кадрами осуществляют на основе изменения относительного положения меток между кадрами и оценки достоверности поиска областей, оценку изменения направления движения и координат местоположения транспортного средства проводят с учетом изменения позиции между кадрами и расстояний до меток, а определение расстояния до точек изображения осуществляют дальномером.
| US 10042361 В2, 07.08.2018 | |||
| СИСТЕМЫ И СПОСОБЫ ЗАХВАТА ИЗОБРАЖЕНИЙ БОЛЬШОЙ ПЛОЩАДИ ПО ЧАСТЯМ, ВКЛЮЧАЮЩИЕ В СЕБЯ КАСКАДНЫЕ КАМЕРЫ И/ИЛИ КАЛИБРОВОЧНЫЕ ПРИЗНАКИ | 2010 |
|
RU2562707C2 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ, ИСПОЛЬЗУЮЩИЕ ТРИ НЕСУЩИХ РАДИОСИГНАЛА, ПЕРЕДАВАЕМЫХ СПУТНИКОМ, И ИОНОСФЕРНЫЕ КОРРЕКЦИИ | 2003 |
|
RU2318222C2 |
| СПОСОБ НАВИГАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА И СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2508622C2 |

