Изобретение относится к области измерительной техники, в частности к системам телеметрического контроля скорости транспортных средств.
Известен способ телеметрического измерения и фиксации скорости транспортных средств, основанный на видеонаблюдении за транспортной обстановкой на дороге, решении задачи выделения отдельного объекта из нескольких объектов в потоке транспортных средств, находящихся в поле зрения, на основе коррекции цветовой гаммы, яркости и контраста для оптимального выделения интересующего объекта; фильтрации изображения для подавления световых помех; выделении движущегося объекта на основе видеопоследовательности объектов с применением простого разностного алгоритма; преобразовании двухмерных координат объекта в плоскости фотоприемной матрицы в трехмерные пространственные координаты, вычислении вектора скорости объекта на основе измерения параметров движение на предварительно калиброванном расстоянии или измерении расстояния по вспомогательному неподвижному объекту в поле зрения видеокамеры, если у неподвижного объекта известны геометрические размеры; анализе и фиксации скоростных характеристик выделенного объекта (Обухова Н.А. Алгоритмы обнаружения и идентификации транспортных средств в телевизионных системах мониторинга городских магистралей // Телевидение: передача и обработка изображений. Материалы международной конференции. 21-22 мая 2002 г., СПб., 2002).
Недостаток такого способа телеметрического измерения и фиксации скорости транспортных средств заключается в сложности процесса обработки видеоизображения, неустойчивого к изменению яркости фона и объектов, что определяет большую ресурсоемкость вычислительных средств.
Наиболее близким к способу телеметрического измерения и фиксации скорости транспортных средств является способ телеметрического измерения и фиксации скорости транспортных средств, основанный на видеонаблюдении за транспортной обстановкой на дороге с помощью видеокамеры, установленной над дорогой под определенным углом места, решении задачи выделения движущегося отдельного объекта наблюдения, находящегося в поле зрения видеокамеры, основанный на предварительной измерению калибровке продольного размера кадра с привязкой фактического расстояния на дорожном полотне к относительному расстоянию на кадре, соответствующему конкретному углу места размещения видеокамеры относительно полотна дороги, предварительной измерению периодической фиксации изображения дорожного полотна, свободного от движущихся транспортных средств, покадровой съемке дорожного полотна с последующим вычитанием из полученного покадрового изображения изображения дорожного полотна, свободного от движущихся транспортных средств, выявлении перемещающегося объекта на однородном цветовом фоне разностного кадра, выявлении и выделении самых темных и самых светлых частей - реперных меток - перемещающегося объекта и вычислении геометрических центров реперных меток, измерении скорости перемещения геометрических центров реперных меток на кадре, усреднении скоростей перемещения центров реперных меток на кадре, вычислении скорости продольного перемещения объекта на основе усредненной скорости перемещения реперных меток и предварительной калибровки продольного размера кадра (патенте RU 2486598 C1, МПК G08G 1/052, «Способ телеметрического измерения и фиксации скорости движущихся транспортных средств».
Недостаток такого способа телеметрического измерения и фиксации скорости транспортных средств заключается в сложности процесса обработки видеоизображения, основанного на покадровом вычислении центра реперных меток перемещающегося объекта, требующего высокой производительности цифровых процессоров.
Технической задачей изобретения является упрощение способа телеметрического измерения и фиксации скорости транспортных средств и повышение достоверности измерения скорости транспортного средства.
Это достигается тем, что в известном способе телеметрического измерения и фиксации скорости транспортных средств, заключающемся в видеонаблюдении за транспортной обстановкой на дороге с помощью видеокамеры, установленной под определенным углом места, выделении движущегося отдельного объекта наблюдения, находящегося в поле зрения видеокамеры, осуществлении предварительной измерению калибровке продольного размера кадра с привязкой фактического расстояния на дорожном полотне к относительному расстоянию на кадре, периодической фиксации изображения дорожного полотна, свободного от движущихся транспортных средств, покадровой съемке дорожного полотна с последующим вычитанием из полученного покадрового изображения изображения дорожного полотна, свободного от движущихся транспортных средств, выявлении перемещающегося объекта на однородном цветовом фоне разностного кадра, выявлении реперных меток перемещающегося объекта, измерении скорости перемещения реперных меток на кадре, усреднении скоростей перемещения реперных меток на кадре, вычислении скорости продольного перемещения объекта на основе усредненной скорости перемещения реперных меток и предварительной калибровки продольного размера кадра, видеокамеру размещают на обочине дороги, реперные метки образуют точки светящегося контура световых приборов транспортных средств, формируемого вычитанием двух последующих кадров, относительные расстояния на кадре формируют реперные линии, скорость объекта определяется по отрезку времени, соответствующему разности моментов пересечения выбранными точками реперных меток фиксированного расстояния между выделенными поперечными дорожному полотну реперными линиями, сдвинутыми вдоль дорожного полотна на фиксированное расстояние от 5 до 10 м, идентификацию объекта осуществляют выделением на реперной линии пар светящихся точек, расстояние вдоль реперной линии между которыми меньше физических длин 0,5 м, а расстояние между крайними ближайшими точками соседних пар меньше 2 м.
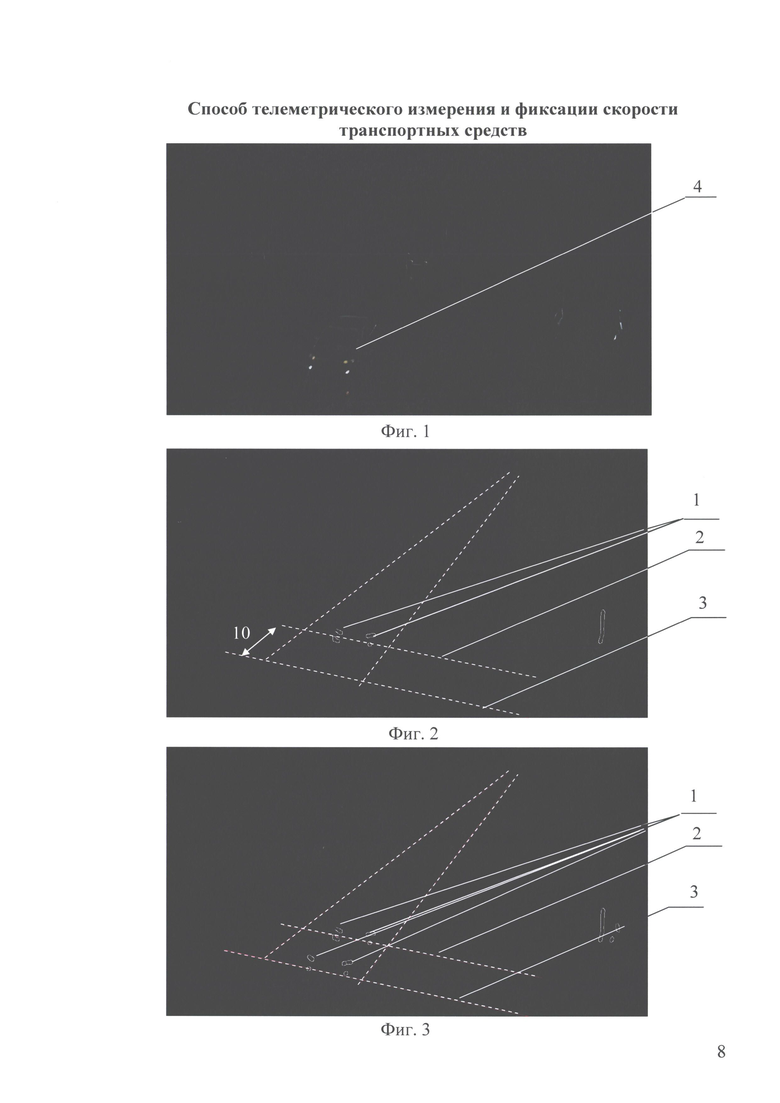
Сущность изобретения поясняется изображениями, где на фиг. 1 приведен пример наблюдаемого транспортного средства, на фиг. 2 показан вариант калибровки продольных размеров видеокадра относительно полотна дороги и одновременно вид реперных меток перемещающегося объекта, а на фиг. 3 приведен пример изображения дорожного полотна с изображением совмещенного положения реперных меток движущегося транспортного средства пересекающего в две реперные линии разметки дорожного полотна.
Сущность предложения заключается в том, что в способе телеметрического измерения и фиксации скорости транспортных средств измерение продольной скорости перемещения выделенного объекта на дороге осуществляется в результате последовательности действий обработки покадровых изображений транспортной обстановки в зоне наблюдения видеокамеры.
Во-первых, после установки видеокамеры относительно участка трассы видеонаблюдения осуществляется предварительная измерению калибровка продольных размеров видеоизображения относительно реальных расстояний участка трассы видеонаблюдения. Калибровка осуществляется, например, с применением ленты-маркера размещенной вдоль трассы, на которой нанесены видимые метки расстояний, устойчиво фиксируемые видеокамерой в кадре (на экране, на изображении). Калибровка продольных размеров приведена на фиг. 2 и фиг. 3 в виде поперечных реперных линий 2 и 3.
Во-вторых, фиксируется и запоминается изображение участка трассы наблюдения в отсутствии транспортных средств. Это процесс предварительной измерению калибровки состояния трассы. Причем получение изображения трассы в отсутствие движущихся транспортных средств возможно и при наличии перемещающихся объектов. Для этого осуществляется вычитание ряда последовательных кадров и выделение на них той части кадров, которая свободна от изменяющихся изображений. Процедура калибровки проводится периодически, на основе критерия изменения цвета однородного цветового фона разностного кадра при фиксации перемещающегося объекта (возникающего в процессе измерения скорости объекта). Это действие закладывается в программу обработки данных для измерения.
Третий этап процесса измерения и фиксации скорости транспортных средств заключается в покадровой съемке дорожного полотна с последующим вычитанием из полученного покадрового изображения, изображения дорожного полотна свободного от движущихся транспортных средств и выявление на темном фоне разностного кадра на фиг. 1 перемещающегося объекта 4.
Четвертый этап процесса измерения и фиксации скорости транспортных средств заключается в выделении светящейся кромки 1 световых приборов перемещающегося объекта 4, которые используются как реперные метки. Светящиеся кромки 1 световых приборов получают программным путем, например в результате вычитания изображений последующих кадров кадра.
Пятый этап - идентификация принадлежности выделенных реперных меток одному объекту - транспортному средству. Процесс заключается в программо обеспеченном сравнении поперечных размеров между двумя соседними светящимися точками, лежащими на линии параллельной реперной линии и допустимого расстояния между ними, ограниченного физическим размером 0,5 м, а также в контроле расстояния между крайними ближайшими точками соседних пар (т.е реперных меток, принадлежащих одному объекту), которое для современных транспортных средств обычно меньше 2 м. Итак, выбранные физические размеры 0,5 м и 2 м ограничивают метрические длины световых приборов и расстояний между ними у современных скоростных транспортных средств.
Шестой этап процесса измерения и фиксации скорости транспортных средств заключается в измерении интервала времени между моментами пересечения реперных линий выбранными точками реперных меток 1, например двумя, или четырьмя точками, лежащими на линии параллельной реперной линии 2 и 3.
Для повышения точности измерений, измерение интервала времени между моментами пересечения реперными метками реперных линий проводится на основе выбора нескольких светящихся точек, лежащих на линии параллельной реперной линии.
Последний шестой этап фиксации скорости автомобилей в транспортном потоке заключается вычисление скорости продольного перемещения объекта на основе усредненной скорости перемещения реперных меток и предварительной калибровки продольного размера кадра.
Достижение технической задачи, а именно, упрощение способа телеметрического измерения и фиксации скорости транспортных средств и повышение достоверности измерения скорости транспортного средства обеспечивается в результате применения в качестве реперных меток контура световых приборов И, наконец, применение в качестве реперных меток - светящегося контура световых приборов транспортных средств позволяет осуществить идентификацию транспортного средства в потоке транспортных средств и повысить достоверность измерений их скорости.
Использование изобретения позволяет упростить способ телеметрического измерения скорости транспортного средства и повысить достоверность измерения скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕЛЕМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ И ФИКСАЦИИ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2486598C1 |
| Устройство для позиционирования и определения скорости железнодорожных подвижных единиц | 2020 |
|
RU2738768C1 |
| Способ автоматического определения в поле видеонаблюдения статистических характеристик рассеивания траекторий характерных точек транспортных средств | 2022 |
|
RU2779971C1 |
| СПОСОБ И СИСТЕМА КАЛИБРОВКИ КОМПЛЕКСА ИЗМЕРЕНИЯ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2592711C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДОРОЖНОГО ДВИЖЕНИЯ И СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2021 |
|
RU2760058C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2592712C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ФИКСАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И ПРАВИЛ ПАРКОВКИ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2014 |
|
RU2578651C1 |
| СПОСОБ РЕГИСТРАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2014 |
|
RU2569070C1 |
| Способ детекции протяженных линейных объектов на изображении | 2022 |
|
RU2802991C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ С ПОСЛЕДУЮЩЕЙ ИХ ИДЕНТИФИКАЦИЕЙ И АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИЕЙ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2382416C2 |
Способ телеметрического измерения и фиксации скорости транспортных средств относится к области измерительной техники, в частности к системам телеметрического контроля скорости транспортных средств. Способ заключается в видеонаблюдении за транспортной обстановкой на дороге с помощью видеокамеры, установленной под определенным углом места, выделении движущегося отдельного объекта наблюдения, находящегося в поле зрения видеокамеры, осуществлении предварительной измерению калибровке продольного размера кадра с привязкой фактического расстояния на дорожном полотне к относительному расстоянию на кадре, периодической фиксации изображения дорожного полотна, свободного от движущихся транспортных средств, покадровой съемке дорожного полотна с последующим вычитанием из полученного покадрового изображения изображения дорожного полотна, свободного от движущихся транспортных средств, выявлении перемещающегося объекта на однородном цветовом фоне разностного кадра, выявлении реперных меток перемещающегося объекта, измерении скорости перемещения реперных меток на кадре, усреднении скоростей перемещения реперных меток на кадре, вычислении скорости продольного перемещения объекта на основе усредненной скорости перемещения реперных меток и предварительной калибровки продольного размера кадра. Видеокамеру размещают на обочине дороги, реперные метки образуют точки светящегося контура световых приборов транспортных средств, формируемого вычитанием двух последующих кадров, относительные расстояния на кадре формируют реперные линии, скорость объекта определяется по отрезку времени, соответствующему разности моментов пересечения выбранными точками реперных меток фиксированного расстояния между выделенными поперечными дорожному полотну реперными линиями, сдвинутыми вдоль дорожного полотна на фиксированное расстояние от 5 до 10 м, идентификацию объекта осуществляют выделением на реперной линии пар светящихся точек. Технический результат позволяет упростить способ телеметрического измерения и фиксации скорости транспортных средств и повысить достоверность измерения скорости транспортного средства. 3 ил.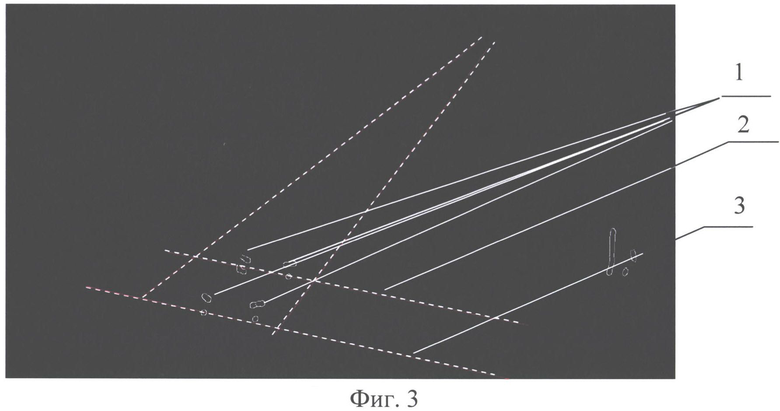
Способ телеметрического измерения и фиксации скорости транспортных средств, заключающийся в видеонаблюдении за транспортной обстановкой на дороге с помощью видеокамеры, установленной под определенным углом места, выделении движущегося отдельного объекта наблюдения, находящегося в поле зрения видеокамеры, осуществлении предварительной измерению калибровке продольного размера кадра с привязкой фактического расстояния на дорожном полотне к относительному расстоянию на кадре, периодической фиксации изображения дорожного полотна, свободного от движущихся транспортных средств, покадровой съемке дорожного полотна с последующим вычитанием из полученного покадрового изображения изображения дорожного полотна, свободного от движущихся транспортных средств, выявлении перемещающегося объекта на однородном цветовом фоне разностного кадра, выявлении реперных меток перемещающегося объекта, измерении скорости перемещения реперных меток на кадре, усреднении скоростей перемещения реперных меток на кадре, вычислении скорости продольного перемещения объекта на основе усредненной скорости перемещения реперных меток и предварительной калибровки продольного размера кадра, отличающийся тем, что видеокамеру размещают на обочине дороги, реперные метки образуют точки светящегося контура световых приборов транспортных средств, формируемого вычитанием двух последующих кадров, относительные расстояния на кадре формируют реперные линии, скорость объекта определяют по отрезку времени, соответствующему разности моментов пересечения выбранными точками реперных меток фиксированного расстояния между выделенными поперечными дорожному полотну реперными линиями, сдвинутыми вдоль дорожного полотна на фиксированное расстояние от 5 до 10 м, идентификацию объекта осуществляют выделением на реперной линии пар светящихся точек, расстояние вдоль реперной линии между которыми меньше физических длин 0,5 м, а расстояние между крайними ближайшими точками соседних пар меньше 2 м.
| СПОСОБ ТЕЛЕМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ И ФИКСАЦИИ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2486598C1 |
| US 8184863 B2, 22.05.2012. | |||

