Изобретение относится к области авиационной техники и может быть применено в конструкции высокоскоростных реактивных самолетов-вертолетов, имеющих хвостовое оперение типа чайка и на концах крыла двухлопастные несущие винты (ДНВ), но и в крыльевых гондолах свободные силовые турбины, приводящие ДНВ и выносные турбовентиляторы, интегрированные с наплывами крыла, создающие при вертикальном и коротком взлете/посадке (ВВП и КВП) пропульсивно-реактивную тягу, направленную назад с работающими/авторотирующими поперечными ДНВ или зафиксированными их лопастями-крыльями наружу от крыла соответственно при горизонтальном полете в конфигурации винтокрыла/крылатого автожира или самолета.
Известен самолет вертикального взлета и посадки модели (СВВП) DO.31 компании Dornier (ФРГ), имеющий высокорасположенное крыло, на концах которого смонтированы гондолы с подъемными турбореактивными двухконтурными двигателями (ТРДД), создающими вертикальную тягу наравне с подкрыльными подъемно-маршевыми ТРДД, имеющими отклоняемые вниз-вверх боковые поворотные сопла, изменяющие вектор реактивной тяги каждого ТРДД, хвостовое крестообразное оперение.
Признаки, совпадающие - комбинированная силовая установка имеет два подъемно-маршевых ТРДД компании Бристоль Сиддли мод. BS.53 "Пегас" 5-2 с тягой по 7000 кгс, установленных в гондолах под крылом. Гондолы ТРДД имеют воздухозаборники осевые нерегулируемые и с каждой их стороны по две пары поворотных сопла с управляемым вектором тяги, которые поворачиваются в вертикальной плоскости для направления выходящей из ТРДД струи газов назад параллельно оси СВВП при горизонтальном полете или вниз при выполнении ВВП. Подъемные ТРДД компании Роллс-Ройс мод. RB. 162-4 тягой по 2000 кгс, установленные по четыре в двух гондолах, имеют общие воздухозаборники с открывающимися их створками, снабжены соплами с дефлекторами, отклоняющими поток газов на 15° вперед или назад.
Причины, препятствующие поставленной задаче: первая - это то, что подкрыльное расположение ТРДД с их боковыми соплами, изменяющими вектор реактивной их тяги, предопределяет наличие с каждой стороны гондолы их обтекателей и сложной системы синхронного отклонения вниз-вверх потока струи газов каждого ТРДД, что усложняет конструкцию. Вторая - это то, что сопла подъемных ТРДД на концах крыла с увеличением угла его атаки на переходных режимах полета создают опасность появления на крыле срыва потока до создания подъемными ТРДД и поворотными соплами подъемно-маршевых ТРДД необходимой подъемной силы, что снижает надежность и поперечную управляемость. Третья - это то, что для выполнения ВВП и зависания имеется двойная раздельная система создания вертикальной тяги и поперечно-продольной управляемости (подъемные ТРДД и боковые сопла ТРДД), что неизбежно ведет к утяжелению, увеличению объема регламентных работ и удорожанию эксплуатации, но и уменьшению весовой отдачи, так как при горизонтальном его полете сами подъемные ТРДД, увеличивая паразитную массу, бесполезны. Все это ограничивает возможность повышения скорости и дальности полета соответственно более 644 км/ч и 681 км, а использование подъемных ТРДД при выполнении ВВП и зависания приводит к увеличению показателей топливной эффективности до 204,38 г/пасс⋅км при целевой нагрузке (ЦН), составляющей 44 человека.
Известен СВВП проекта HS.803 компании Hawker Siddeley (Великобритания), содержащий низко-расположенное крыло, силовую установку с реактивными двигателями на концах и по бокам фюзеляжа и двигателями на концах крыла в мотогондолах, снабженных над ними пилонами с несущими винтами (НВ), имеет Т-образное хвостовое оперение и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - наличие подкрыльных обтекателей с НВ, создающими только вертикальную тягу, струйную систему с воздуховодом, проложенным внутри крыла и обеспечивающим равномерное распределение мощности двух двигателей, имеющих газогенераторы, воздух которых, направляясь к воздушным турбинам, будет вращать НВ. Особенностью конструкции коммерческого СВВП проекта HS.803 с пассажировместимостью 100 человек и дальностью действия до 931 км были - концепция Control Circulation Rotors (CCR), т.е. роторы с регулируемой циркуляцией и неподвижное размещение под крылом двигателей: при переходе в самолетный режим полета останавливались только трехлопастные НВ, имеющие узлы складывания и фиксирования их лопастей, которые располагались параллельно оси симметрии.
Причины, препятствующие поставленной задаче: первая - это то, что размещение на концах крыла подкрыльных обтекателей с воздушными турбинами и НВ, имеющими автоматы перекосов с управлением их общего, циклического и дифференциального изменения их шага, что предопределяет конструктивно сложное стреловидное крыло с воздуховодами, оснащенное сложной системой привода НВ и механизации крыла, что усложняет конструкцию и уменьшает надежность, но и значительно увеличивает габаритные размеры по ширине с вращающимися НВ. Вторая - это то, что диаметры двух НВ ограничены размахом консолей крыла и как, следствие, при висении поток от НВ, обдувая консоли крыла и создавая значительную общую потерю (≈18%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги НВ и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что силовая установка включает двигатели избыточной мощности, используемой при выполнении ВВП на 50%, что весьма снижает весовую отдачу, особенно, при отказе одного из них, а расположение на концах крыла НВ с зафиксированными их лопастями предопределяет, повышая аэродинамическое сопротивление, ограничения в достижении крейсерской скорости только до 695,0 км/ч. Все это ограничивает возможность уменьшения массы конструкции планера и дальнейшего увеличения весовой отдачи, особенно, при удвоении тяговооруженности и без дальнейшего увеличения диаметра НВ, но и улучшения стабильности продольной управляемости при выполнении ВВП и зависания с Т-образным хвостовым оперением.
Наиболее близким к предлагаемому изобретению является скоростной гибридный вертолет (СГВ) "Eurocopter Х3" (ЕС), содержащий на концах крыла двухвинтовую движительно-рулевую систему и над ней несущий винт (НВ), имеет двигатели силовой установки (СУ), передающие крутящий момент через главный редуктор и соединительные валы соответственно на НВ и тянущие винты, создающие управление по курсу с компенсацией крутящего момента и маршевую тягу, хвостовое оперение и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - наличие высокорасположенного крыла, двухкилевого оперения и двух турбовальных двигателей Turbomeca RTM322 мощностью по 2720 л.с., более сложного редуктора и трансмиссии валов с общей длиною 10,82 м, передающих мощность несущему и передним тянущим винтам. Несущий винт, имеющий автомат перекоса с управлением общего и циклического изменения его шага, предназначен для создания подъемной силы, а поступательное движение в скоростном полете обеспечивают тянущие винты, которые также предотвращают вращение вертолета на режиме висения при компенсации реактивного момента, возникающего при вращении несущего винта. Вращение несущего и передних двух винтов - синхронизирующее. Скоростной гибридный вертолет "Eurocopter Х3", выполненный на платформе вертолета модели ЕС155 с рядом агрегатов от ЕС175, оснащен крылом, которое, имея большое отрицательное поперечное V, снижает нагрузку на несущий винт и обеспечивает до 80% общей подъемной силы при горизонтальном полете и позволяет летать на 50% быстрее и выше, чем современные классические вертолеты, достичь скорости до 430 км/ч, дальности полета до 1248 км и иметь практический потолок 7600 м при перевозке 16 человек с топливной эффективностью 80,67 г/пасс⋅км (с учетом резерва топлива для выполнения получасового полета). Взлетная тяговооруженность силовой установки, позволяющая при использовании 70% ее мощности, иметь целевую нагрузку 1600 кг и увеличить взлетный вес вертолета модели ЕС155 на 30%.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет одновинтовой несущей схемы с передними винтами на концах консолей крыла, используемыми как при висении в качестве рулевых винтов, так и на крейсерских режимах полета в качестве двухвинтовых движителей, имеет повышенное аэродинамическое сопротивление, сложную схему редуцирования при независимом вращении трех винтов, но и малую весовую отдачу и радиус действия. Вторая - это то, что в вертолете одновинтовой несущей схемы имеют место непроизводительные затраты мощности, требуемой для парирования реактивного момента от несущего двумя винта тянущими винтами составляют 12-16% от мощности, потребной для вращения несущего винта, а также необходимость агрегатов крыльевой трансмиссии тянущих винтов, имеющих почти на ≈38% меньше их тягу в сравнении с соосными закапотированными винтами и создающих опасность для наземного персонала. Третья - это то, что вес передних винтов вместе с крылом и агрегатами трансмиссии составляет до 15% веса пустого вертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Четвертая - это то, что крыло и хвостовое оперение не имеют механизации и поверхностей управления, что предопределяет для управления по крену и тангажу необходимость постоянного вращения нагруженного несущего винта с автоматом перекоса и при авторотации последнего не позволяет использовать его для продольно-поперечного управления. Пятая - это то, что расположение двух тянущих винтов под несущим винтом создает вредное сопротивление, приводящее к их разнотяговости, но и к значительному повышению уровня шума вследствие взаимовлияния тянущих винтов и несущего винта. Кроме того, в такой конструкции, не исключается появление самовозбуждающихся колебаний, высоких переменных напряжений и вибраций, но и других видов динамической неустойчивости конструкции, в том числе одного из опаснейших - воздушного резонанса несущего винта и, особенно, не закапотированных тянущих винтов. Шестая - это то, что при висении поток от несущего винта, обдувая консоли крыла и создавая значительную общую потерю в вертикальной его тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги несущего винта и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. А по мере роста скорости горизонтального полета проблема также усугубляется, поскольку на отступающей стороне несущего винта возникает участок, в котором абсолютная скорость его лопастей относительно воздуха становится практически нулевой и этот участок лопастей, естественно, в создании подъемной силы не участвует, что ухудшает уравновешивание в поперечном канале, особенно, из-за расположения этого участка как раз над прямым крылом. Седьмая - это то, что несущий винт изменяемого шага и с управлением циклического его шага значительно осложняет конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создающего неблагоприятные условия для работы других механизмов и оборудования. Все это ограничивает при более высоком удельном расходе топлива возможность повышения дальности полета, показателей транспортной и топливной эффективности, но и уменьшения при висении непроизводительных затрат мощности, особенно, при управлении по курсу.
Предлагаемым изобретением решается задача в указанном выше известном скоростном гибридном вертолете "Eurocopter Х3" увеличения целевой нагрузки и весовой отдачи, повышения скорости и дальности полета, упрощения управления по крену при висении и на переходных режимах полета, уменьшения вибраций и исключения возникновение резонанса в конфигурации автожира с авторутирующими НВ и возможности трансформации в полетную конфигурацию реактивного самолета с зафиксированными на концах крыла лопастями-крыльями двухлопастных НВ.
Отличительными признаками предлагаемого изобретения от указанного выше известного СГВ "Eurocopter Х3", наиболее близкого к нему, являются наличие того, что он в интегральной аэродинамической схеме снабжен как двумя или четырьмя комбинированными газотурбинными двигателями (КГтД), установленными по обе стороны от оси симметрии в подкрыльных/надкрыльных гондолах, размещенных в корневых частях крыла соответственно под передними/над задними наплывами по одному или попарно один над другим так, что нижние из них сдвинуты вперед по полету и интегрированы с вихре образующими передними наплывами, имеющими угол стреловидности и атаки отличными от крыла, увеличивающими на больших углах атаки несущую его способность, распространяющимися от передней кромки высокорасположенного крыла и, отклоняясь к носовой части фюзеляжа, образуют V-образную в плане конфигурацию, выполненными в виде двухконтурных двигателей, имеющих внешний и внутренний контуры соответственно с выносным турбовентилятором (ВТВ) и свободной силовой турбиной, снабженной передним выводом вала для отбора мощности и ее передачи через муфту сцепления на входные валы двух или четырех Т-образных в плане промежуточных редукторов, перераспределяющих взлетную мощность СУ между двухлопастными НВ (ДНВ) в симметрично-сбалансированной двухвинтовой поперечно-несущей схеме (ДПНС-Х2) и двумя или четырьмя соосными или однорядными ВТВ, имеющими лопатки с большой их круткой, работающие по тянущей схеме в соответствующих подкрыльных/надкрыльных гондолах, размещенных при виде спереди под левым и правым инвертированными V-образными конфигурациями хвостового оперения типа чайка, внутренние и внешние стреловидные секции из которых соответственно снабжены рулями направления и высоты, используются совместно с ДНВ, создавая в пропульсивно-реактивной системе (ПРС-R2 или ПРС-R4) маршевую тягу синхронно горизонтально назад и параллельно оси симметрии при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, так и высокорасположенным крылом прямой или обратной стреловидности (ВКПС или ВКОС), имеющим угол χ=+20° или χ=-20° стреловидности по передней кромке, предкрылки, развитые закрылки и элероны, большое (λ=7,5-8,5) удлинение и размах в  или
или  раза больше диметра (D) ДНВ и смонтированным с отрицательным углом (ϕ) поперечного V, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда оба ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно передней кромке левой и правой консолей ВКПС/ВКОС или по оси симметрии, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой/обратной или нулевой стреловидностью по передним кромкам ДЛК ДНВ, образуя с ВКПС/ВКОС равновеликую стреловидность χ=+20°/χ=-20° или χ=0°, организуют синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и размещены в плане параллельно передней кромке ВКПС/ВКОС для горизонтального полета в конфигурации реактивного самолета с ПРС-R2 или ПРС-R4 и системой ступенчатых крыльев (ССК), образующей большое (λ=12,5-14,5) ее удлинение и включающей при виде спереди с ярусным размещением на концах консолей ВКПС/ВКОС и наружу от них зафиксированные ДЛК левого и правого ДНВ, но и обратно, при этом в каждой передней/задней паре КГтД или в двух передних с двумя задними КГтД каждый Т-образный в плане промежуточный редуктор, имеющий выходные валы, продольный из которых через муфту сцепления передает потребную мощность на ВТВ в ПРС-R2 или ПРС-R4, а поперечный синхронизирующий вал вращательно связан с Т-образным в плане передним/задним или передним с задним объединительным редуктором, передающим через муфту сцепления продольным валом крутящий момент на передний/задний Т-образный или центральный крестообразный в плане главный редуктор, размещенный по оси симметрии соответственно зеркально к объединительному редуктору или спереди и сзади главного редуктора, передает потребную мощность посредством двух поперечных валов, проложенных в консолях крыла и вращательно связанных с угловыми вертикальными редукторами ДНВ, выходные валы которых размещены на поперечной оси, проходящей в плане через центр масс, причем на режимах ВВП и зависания полная компенсация реактивного крутящего момента в ДПНС-Х2 от работающих ДНВ, выполненных с автоматом перекоса и жестким креплением их лопастей, создается противоположным направлением вращения левого и правого ДНВ, только, по часовой и против часовой стрелки, а изменение балансировки по тангажу, крену и курсу обеспечивается изменением соответствующего циклического шага и дифференциальным изменением тяги общего шага двух ДНВ соответственно, при этом внешние секции левой и правой инвертированной V-образной конфигурации хвостового оперения типа чайка смонтированы горизонтально или параллельно соответствующей консоли ВКПС/ВКОС.
раза больше диметра (D) ДНВ и смонтированным с отрицательным углом (ϕ) поперечного V, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда оба ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно передней кромке левой и правой консолей ВКПС/ВКОС или по оси симметрии, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой/обратной или нулевой стреловидностью по передним кромкам ДЛК ДНВ, образуя с ВКПС/ВКОС равновеликую стреловидность χ=+20°/χ=-20° или χ=0°, организуют синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и размещены в плане параллельно передней кромке ВКПС/ВКОС для горизонтального полета в конфигурации реактивного самолета с ПРС-R2 или ПРС-R4 и системой ступенчатых крыльев (ССК), образующей большое (λ=12,5-14,5) ее удлинение и включающей при виде спереди с ярусным размещением на концах консолей ВКПС/ВКОС и наружу от них зафиксированные ДЛК левого и правого ДНВ, но и обратно, при этом в каждой передней/задней паре КГтД или в двух передних с двумя задними КГтД каждый Т-образный в плане промежуточный редуктор, имеющий выходные валы, продольный из которых через муфту сцепления передает потребную мощность на ВТВ в ПРС-R2 или ПРС-R4, а поперечный синхронизирующий вал вращательно связан с Т-образным в плане передним/задним или передним с задним объединительным редуктором, передающим через муфту сцепления продольным валом крутящий момент на передний/задний Т-образный или центральный крестообразный в плане главный редуктор, размещенный по оси симметрии соответственно зеркально к объединительному редуктору или спереди и сзади главного редуктора, передает потребную мощность посредством двух поперечных валов, проложенных в консолях крыла и вращательно связанных с угловыми вертикальными редукторами ДНВ, выходные валы которых размещены на поперечной оси, проходящей в плане через центр масс, причем на режимах ВВП и зависания полная компенсация реактивного крутящего момента в ДПНС-Х2 от работающих ДНВ, выполненных с автоматом перекоса и жестким креплением их лопастей, создается противоположным направлением вращения левого и правого ДНВ, только, по часовой и против часовой стрелки, а изменение балансировки по тангажу, крену и курсу обеспечивается изменением соответствующего циклического шага и дифференциальным изменением тяги общего шага двух ДНВ соответственно, при этом внешние секции левой и правой инвертированной V-образной конфигурации хвостового оперения типа чайка смонтированы горизонтально или параллельно соответствующей консоли ВКПС/ВКОС.
Кроме того, на режимах ВВП и зависания каждая упомянутая свободная силовая турбина (ССТ) в каждой ее передней/задней паре или в двух передних с двумя задними КГтД выполнена с элементами цифрового программного управления, сочетающего в двухрежимной системе регулирования и управления одновременный режим ее работы как при отборе 90% или 95% свободной ее мощности на привод упомянутых ДНВ, так и при сбалансированном распределении 10% или 5% остаточной мощности на привод двух или четырех упомянутых ВТВ, создающих минимальную маршевую тягу для необходимого горизонтального поступательного полета, имеет между компрессорами низкого и высокого давления (КНД и КВД) для отбора мощности средний вывод радиального вала, направленного к оси симметрии и передающего от вала КНД, смонтированного соосно и внутри вала КВД и приводимого турбиной низкого давления, посредством конической зубчатой передачи через муфту сцепления свободную мощность от каждой упомянутой ССТ на междвигательный Т-образный редуктор, продольный выходной вал которого вдоль оси симметрии приводит крестообразный в плане промежуточный редуктор, выходные валы которого через две и одну муфты сцепления передает крутящий момент соответственно поперечными валами на соответствующие ВТВ и продольным валом на упомянутый передний/задний Т-образный или крестообразный в плане главный редуктор, при этом каждая подкрыльная/надкрыльная гондола имеет переднюю кромку левого и правого воздухозаборника ее КГтД, которая как размещена в плане параллельно передней кромке соответствующей консоли ВКПС/ВКОС, так и при виде сбоку выполнена соответственно с обратной/прямой стреловидностью, но и снабжена плоским соплом, имеющим заднюю его кромку с термопоглощающим покрытием и в плане обратную стреловидность, причем каждый угловой редуктор ДНВ имеет выходной вертикальный вал, отклоненный наружу от оси симметрии и назад по полету на соответствующие углы, которые соответственно равновелики и равновелик или равен 1/2 величине угла (ϕ) поперечного V упомянутого ВКПС/ ВКОС, при этом набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей обоих ДНВ и зафиксированных соответствующим образом упомянутых их ДЛК, причем высокорасположенная хвостовая балка, снабженная по всей ширине фюзеляжа плоским по горизонтали поперечным эллипсовидным сечением с вогнутой нижней и утонченной ее частью, которая, образуя несущую поверхность, имеет V-образную заднюю кромку и интегрирована по внешним ее бортам с внутренними секциями каждой инвертированной V-образной конфигурации.
Кроме того, для экономичного высокоскоростного горизонтального полета, достигая маршевой тяговоуроженности до 0,24 и 0,39, используется 36% и 72% мощности соответственно от одного и двух или двух и четырех работающих в СУ упомянутых КГтД только на привод упомянутых ВТВ в конфигурации самолета с ПРС-R2 или IIPC-R4, при этом каждый ДНВ в синхронно-сбалансированной несущей и авторотирующуей системе, включающей в упомянутом крестообразном в плане главном редукторе автоматическую коробку передач, имеющую для привода ДНВ выходные поперечные валы, каждый из которых создает по два потока: первый - взлетный с выдачей соответствующей мощности от упомянутых КГтД и созданием подъемной силы от ДНВ, второй - крейсерский в конфигурации крылатого автожира с приемом мощности от авторотации каждого ДНВ на ее соответствующую ступень, отключающую оба ДНВ от привода ССТ упомянутых КГтД, приводящую генератор и управляющую синхронным снижением и скорости их вращения, например, до 200 мин-1 или 100 мин-1, и углом атаки лопастей авторотирующих ДНВ, обеспечивающих долю увеличения в 1/3-1/4 раза требуемой подъемной силы ВКПС/ВКОС, но и плоскостью вращения лопастей ДНВ, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или высокоскоростного полета, приводящим к соответствующему 2,75-кратному сокращению общего сопротивления профиля лопастей ДНВ при их самовращении и возможности для режимов крейсерского полета расчета ВКПС/ВКОС с уменьшенной его геометрией, создающей 2/3-3/4 подъемной силы ВКПС/ВКОС от соответствующего крыла аналогичного реактивного самолета.
Благодаря наличию этих признаков, которые позволят освоить высокоскоростной реактивный самолет-вертолет (ВРСВ), который в интегральной аэродинамической схеме снабжен как двумя или четырьмя комбинированными газотурбинными двигателями (КГтД), установленными по обе стороны от оси симметрии в подкрыльных/надкрыльных гондолах, размещенных в корневых частях крыла соответственно под передними/над задними его наплывами по одному или попарно один над другим так, что нижние из них сдвинуты вперед по полету и интегрированы с вихре образующими передними наплывами, имеющими угол стреловидности и атаки отличными от крыла, увеличивающими на больших углах атаки несущую его способность, распространяющимися от передней кромки высокорасположенного крыла и, отклоняясь к носовой части фюзеляжа, образуют V-образную в плане конфигурацию, выполненными в виде двухконтурных двигателей, имеющих внешний и внутренний контуры соответственно с выносным турбовентилятором (ВТВ) и свободной силовой турбиной, снабженной передним выводом вала для отбора мощности и ее передачи через муфту сцепления на входные валы двух или четырех Т-образных в плане промежуточных редукторов, перераспределяющих взлетную мощность СУ между двухлопастными НВ (ДНВ) в симметрично-сбалансированной двухвинтовой поперечно-несущей схеме (ДПНС-Х2) и двумя или четырьмя соосными или однорядными ВТВ, имеющими лопатки с большой их круткой, работающие по тянущей схеме в соответствующих подкрыльных/надкрыльных гондолах, размещенных при виде спереди под левым и правым инвертированными V-образными конфигурациями хвостового оперения типа чайка, внутренние и внешние стреловидные секции из которых соответственно снабжены рулями направления и высоты, используются совместно с ДНВ, создавая в пропульсивно-реактивной системе (ПРС-R2 или ПРС-R4) маршевую тягу синхронно горизонтально назад и параллельно оси симметрии при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, так и высокорасположенным крылом прямой или обратной стреловидности (ВКПС или ВКОС), имеющим угол χ=+20° или χ=-20° стреловидности по передней кромке, предкрылки, развитые закрылки и элероны, большое (λ=7,5-8,5) удлинение и размах в  или
или  раза больше диметра (D) ДНВ и смонтированным с отрицательным углом (ϕ) поперечного V, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда оба ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно передней кромке левой и правой консолей ВКПС/ВКОС или по оси симметрии, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой/обратной или нулевой стреловидностью по передним кромкам ДЛК ДНВ, образуя с ВКПС/ВКОС равновеликую стреловидность χ=+20°/χ=-20° или χ=0°, организуют синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и размещены в плане параллельно передней кромке ВКПС/ВКОС для горизонтального полета в конфигурации реактивного самолета с ПРС-R2 или ПРС-R4 и системой ступенчатых крыльев (ССК), образующей большое (λ=12,5-14,5) ее удлинение и включающей при виде спереди с ярусным размещением на концах консолей ВКПС/ВКОС и наружу от них зафиксированные ДЛК левого и правого ДНВ, но и обратно, при этом в каждой передней/задней паре КГтД или в двух передних с двумя задними КГтД каждый Т-образный в плане промежуточный редуктор, имеющий выходные валы, продольный из которых через муфту сцепления передает потребную мощность на ВТВ в ПРС-R2 или ПРС-R4, а поперечный синхронизирующий вал вращательно связан с Т-образным в плане передним/задним или передним с задним объединительным редуктором, передающим через муфту сцепления продольным валом крутящий момент на передний/задний Т-образный или центральный крестообразный в плане главный редуктор, размещенный по оси симметрии соответственно зеркально к объединительному редуктору или спереди и сзади главного редуктора, передает потребную мощность посредством двух поперечных валов, проложенных в консолях крыла и вращательно связанных с угловыми вертикальными редукторами ДНВ, выходные валы которых размещены на поперечной оси, проходящей в плане через центр масс, причем на режимах ВВП и зависания полная компенсация реактивного крутящего момента в ДПНС-Х2 от работающих ДНВ, выполненных с автоматом перекоса и жестким креплением их лопастей, создается противоположным направлением вращения левого и правого ДНВ, только, по часовой и против часовой стрелки, а изменение балансировки по тангажу, крену и курсу обеспечивается изменением соответствующего циклического шага и дифференциальным изменением тяги общего шага двух ДНВ соответственно, при этом внешние секции левой и правой инвертированной V-образной конфигурации хвостового оперения типа чайка смонтированы горизонтально или параллельно соответствующей консоли ВКПС/ВКОС. Все это позволит увеличить показатели аэродинамических и структурных преимуществ интегральной схемы, включающей смешанное крыло с вихре образующими наплывами, имеющими угол стреловидности и атаки отличными от ВКПС, увеличивающими на больших углах атаки несущую способность. В крейсерском полете вихре образующий наплыв, имея нулевой угол атаки, исключает тем самым дополнительное сопротивление, но и организует над его консолями и на их концах симметрично-сбалансированную соответственно авторотирующую и несущую системы, первая из которых включает многоскоростную автоматическую коробку передач, управляющую как снижением скорости вращения ДНВ до 200 мин-1 или 100 мин-1, так и углом атаки лопастей ДНВ, но и плоскостью их вращения, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или высокоскоростного полета. Что приводит к уменьшению вращательного сопротивления ДНВ на 12-15% от общего сопротивления ВРСВ и возможности расчета его ВКПС на крейсерский полет с уменьшенной его геометрией, составляющей 2/3-3/4 от габаритов крыла аналогичного реактивного самолета. А размещение в надкрыльных задних гондолах ВРСВ-2,6 двух КГтД с ВТВ в ПРС-R2 позволит в сравнении с конвертопланом V-22 Osprey и его целевой нагрузкой (ЦН=2,4 тонны) при выполнении ВВП и зависания увеличить ЦН в 1,08 раза и скорость/дальность полета в 1,5/1,25 раза, но и повысить в 2,89/3,67 раза топливную эффективность (до 32,48/25,8 г/пас⋅км) соответственно при крейсерском полете со скоростью 540/770 км/ч в конфигурации крылатого автожира/реактивного самолета.
раза больше диметра (D) ДНВ и смонтированным с отрицательным углом (ϕ) поперечного V, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда оба ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно передней кромке левой и правой консолей ВКПС/ВКОС или по оси симметрии, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой/обратной или нулевой стреловидностью по передним кромкам ДЛК ДНВ, образуя с ВКПС/ВКОС равновеликую стреловидность χ=+20°/χ=-20° или χ=0°, организуют синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и размещены в плане параллельно передней кромке ВКПС/ВКОС для горизонтального полета в конфигурации реактивного самолета с ПРС-R2 или ПРС-R4 и системой ступенчатых крыльев (ССК), образующей большое (λ=12,5-14,5) ее удлинение и включающей при виде спереди с ярусным размещением на концах консолей ВКПС/ВКОС и наружу от них зафиксированные ДЛК левого и правого ДНВ, но и обратно, при этом в каждой передней/задней паре КГтД или в двух передних с двумя задними КГтД каждый Т-образный в плане промежуточный редуктор, имеющий выходные валы, продольный из которых через муфту сцепления передает потребную мощность на ВТВ в ПРС-R2 или ПРС-R4, а поперечный синхронизирующий вал вращательно связан с Т-образным в плане передним/задним или передним с задним объединительным редуктором, передающим через муфту сцепления продольным валом крутящий момент на передний/задний Т-образный или центральный крестообразный в плане главный редуктор, размещенный по оси симметрии соответственно зеркально к объединительному редуктору или спереди и сзади главного редуктора, передает потребную мощность посредством двух поперечных валов, проложенных в консолях крыла и вращательно связанных с угловыми вертикальными редукторами ДНВ, выходные валы которых размещены на поперечной оси, проходящей в плане через центр масс, причем на режимах ВВП и зависания полная компенсация реактивного крутящего момента в ДПНС-Х2 от работающих ДНВ, выполненных с автоматом перекоса и жестким креплением их лопастей, создается противоположным направлением вращения левого и правого ДНВ, только, по часовой и против часовой стрелки, а изменение балансировки по тангажу, крену и курсу обеспечивается изменением соответствующего циклического шага и дифференциальным изменением тяги общего шага двух ДНВ соответственно, при этом внешние секции левой и правой инвертированной V-образной конфигурации хвостового оперения типа чайка смонтированы горизонтально или параллельно соответствующей консоли ВКПС/ВКОС. Все это позволит увеличить показатели аэродинамических и структурных преимуществ интегральной схемы, включающей смешанное крыло с вихре образующими наплывами, имеющими угол стреловидности и атаки отличными от ВКПС, увеличивающими на больших углах атаки несущую способность. В крейсерском полете вихре образующий наплыв, имея нулевой угол атаки, исключает тем самым дополнительное сопротивление, но и организует над его консолями и на их концах симметрично-сбалансированную соответственно авторотирующую и несущую системы, первая из которых включает многоскоростную автоматическую коробку передач, управляющую как снижением скорости вращения ДНВ до 200 мин-1 или 100 мин-1, так и углом атаки лопастей ДНВ, но и плоскостью их вращения, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или высокоскоростного полета. Что приводит к уменьшению вращательного сопротивления ДНВ на 12-15% от общего сопротивления ВРСВ и возможности расчета его ВКПС на крейсерский полет с уменьшенной его геометрией, составляющей 2/3-3/4 от габаритов крыла аналогичного реактивного самолета. А размещение в надкрыльных задних гондолах ВРСВ-2,6 двух КГтД с ВТВ в ПРС-R2 позволит в сравнении с конвертопланом V-22 Osprey и его целевой нагрузкой (ЦН=2,4 тонны) при выполнении ВВП и зависания увеличить ЦН в 1,08 раза и скорость/дальность полета в 1,5/1,25 раза, но и повысить в 2,89/3,67 раза топливную эффективность (до 32,48/25,8 г/пас⋅км) соответственно при крейсерском полете со скоростью 540/770 км/ч в конфигурации крылатого автожира/реактивного самолета.
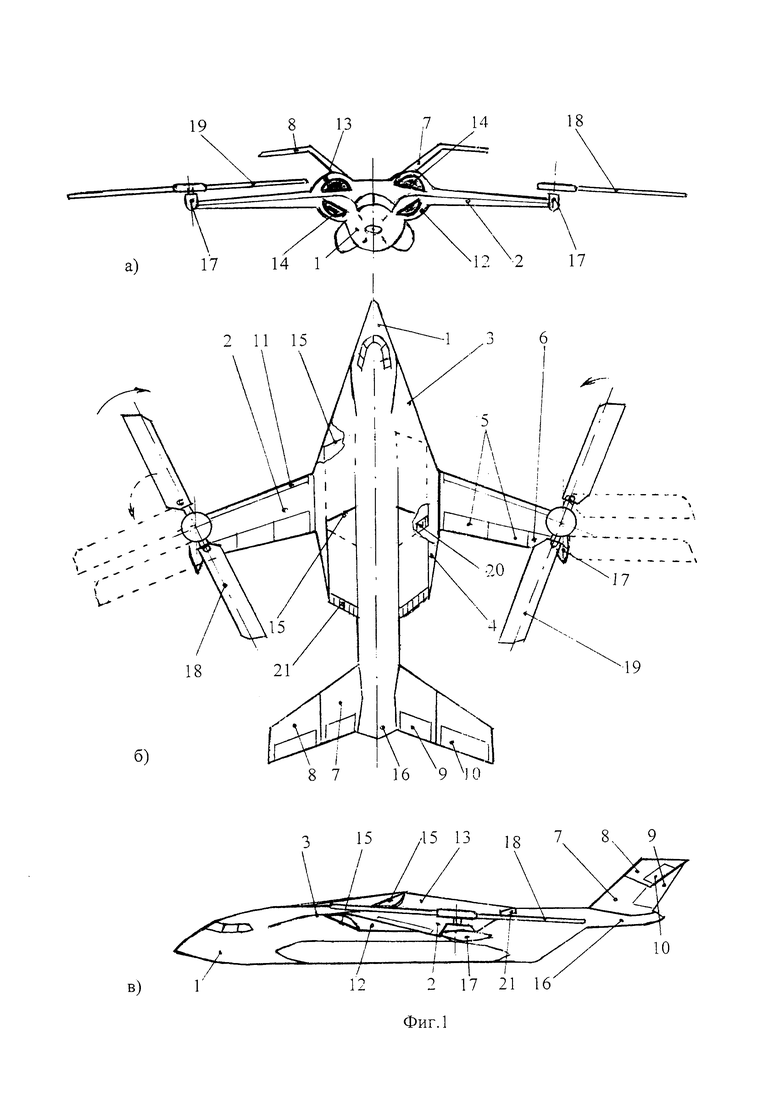
Предлагаемое изобретение предпочтительного исполнения многоцелевого ВРСВ с ВКПС, инвертированными V-образными секциями хвостового оперения типа чайка, двумя ДНВ в ДПНС-Х2 и четырьмя ТВаД с их ВТВ в ПРС-R4, размещенными попарно в подкрыльных и надкрыльных гондолах под вихре образующими передними и над развитыми задними наплывами ВКПС, приводящими ДНВ и четыре ВТВ, иллюстрируется на фиг. 1 и общих видах спереди, сверху и сбоку соответственно а), б) и в):
а) в полетной конфигурации крылатого автожира или реактивного самолета с ВКПС, создающим большую подъемную силу, чем подъемная сила, создаваемая авторотирующими ДНВ или зафиксированными их ДЛК, и четырьмя ВТВ, размещенными в гондолах перед инвертированными V-образными оперениями, создающими маршевую тягу в ПРС-R4 скоростного или высокоскоростного полета с условным размещением авторотирующих правых ДНВ или зафиксированных левых ДЛК ДНВ;
б) в полетной конфигурации вертолета с ВКПС и его стреловидностью χ=+20°, широкохордовыми ДНВ, вращающимися над консолями ВКПС, лопасти-крылья ДНВ показаны пунктиром и с условным размещением зафиксированных левых и правых ДЛК ДНВ со стреловидностью χ=+20° и χ=0° соответственно в конфигурации самолета для высокоскоростного полета и при выполнении взлетно-посадочных режимов;
в) в полетной конфигурации винтокрыла КВП с ВКПС, четырьмя ТВаД, приводящими через систему трансмиссии два ДНВ в ДПНС-Х2 и четыре ВТВ в ПРС-R4.
Многоцелевой ВРСВ палубного или без аэродромного базирования, представленный на фиг. 1, выполнен по концепции ДПНС-Х2 и четырьмя ВТВ в ПРС-R4, имеет в интегральной аэродинамической схеме планер из алюминиевых сплавов и композитного углепластика, содержит фюзеляж 1, имеющий как ВКПС 2 со стреловидностью χ=+20°, вихре образующими передними 3 и развитыми задними 4 наплывами, внутренними и внешними закрылками 5 и элеронами 6, так и с инвертированными V-образными секциями хвостового оперения типа чайка, внутренние 7 и внешние 8 стреловидные секции из которых соответственно снабжены рулями направления 9 и высоты 10. Консоли ВКПС 2 со стреловидностью χ=+20° по передней кромке и соответствующими предкрылками 11, смонтированные с отрицательным углом поперечного V, имеют от передней и задней кромок соответствующие корневые наплывы 3 и 4, которые интегрированы с подкрыльными 12 и надкрыльными 13 гондолами с полукруглыми при виде спереди их воздухозаборниками, направляющими раздельно поток воздуха к ВТВ 14, имеющих лопатки с большой их круткой, обдувающих соответствующих ССТ в КГтД (на фиг. 1 не показано) и имеющими передние кромки 15, которые при виде сверху параллельно размещены передней кромке ВКПС 2, а при виде сбоку имеют соответственно обратную и прямую стреловидности. Внутренние секции 7 инвертированного V-образного оперения смонтированы по внешним бортам высокорасположенной тонкой хвостовой балки 16. На концах ВКПС 2 смонтированы пилоны 17 с левым 18 и правым 19 ДНВ, имеющими для полной компенсации реактивного крутящего момента на режимах ВВП и зависания противоположное их вращение соответственно по часовой и против часовой стрелки, и выполнены с автоматом перекоса и жестким креплением их лопастей. В ПРС-R4 каждый из КГтД имеет внешний и внутренний контуры соответственно с ВТВ и ССТ. Комбинированная СУ выполнена с передним выводом вала для отбора мощности от четырех ССТ и возможностью передачи мощности от них на крестообразный в плане главный редуктор (на фиг. 1 не показаны), который плавно перераспределяет 95% и 5% от взлетной мощности СУ при выполнении ВВП и зависания между соответственно двумя ДНВ 18-19 в ДПНС-Х2 и всеми ВТВ 14 в ПРС-R4, имеющими на концах подкрыльных 12 и надкрыльных 13 гондол соответственно пару нижних 20 и пару верхних 21 реактивных плоских сопла, имеющих заднюю их кромку с обратной стреловидностью.
Управление ВРСВ обеспечивается циклическим, общим и дифференциальным изменением шага ДНВ 18-19 и отклонением элеронов 6, рулей направления 9 и высоты 10. При крейсерском скоростном или высокоскоростном полете в конфигурации крылатого автожира или реактивного самолета подъемная сила создается соответственно авторотирующими ДНВ 18-19 с ВКПС 2 или ВКПС 2 с зафиксированными ДЛК 18-19 ДНВ (см. фиг. 1б) в ССК, маршевая реактивная тяга - системой ПРС-R4 через реактивные плоские сопла 20-21 при горизонтальном их размещении, на режиме перехода - ВКПС 2 с ДНВ 18-19. После создания подъемной тяги ДНВ 18-19 в ДПНС-Х2 обеспечиваются режимы ВВП и зависания или КВП при создании плоскими соплами 20-21 реактивной тяги (см. рис. 1в). При выполнении ВВП и зависания изменение балансировки по тангажу, крену и курсу обеспечивается изменением соответствующего циклического шага и дифференциальным изменением тяги общего шага левого 18 и правого 19 ДНВ в ДПНС-Х2 (см. рис. 1б). После вертикального взлета и набора высоты выполняется разгонный полет на скоростях более 300…350 км/ч и осуществляется соответствующее уменьшение оборотов вращения ДНВ 18-19. По мере разгона с ростом подъемной силы крыла ВКПС 2 подъемная сила ДНВ 18-19 уменьшается. При достижении скоростей полета 400…450 км/ч и для перехода на самолетный режим полета ДНВ 18-19 синхронно останавливаются так, что их лопасти предварительно размещены при виде сверху перпендикулярно передней кромке ВКПС 2 или параллельно оси симметрии и снабжены автоматическими узлами складывания их лопастей, которые затем синхронно поворачивают наружу от оси симметрии лопасти-крылья ДНВ 18-19 на угол 90° так, что их ДЛК зафиксированы с прямой или нулевой стреловидностью по передним их кромкам, образуя равновеликую стреловидность χ=+20° с ВКПС или χ=0° в ССК (см. фиг. 1б). При создании реактивной тяги плоскими соплами 20-21 производится высокоскоростной крейсерский полет ВРСВ, при котором путевое управление обеспечивается рулями направления 9. Продольное и поперечное управление при этом осуществляется синфазным и дифференциальным отклонением соответственно рулей высоты 10 и элеронов 6 ВКПС 2.
Таким образом, многоцелевой ВРСВ с ВКПС, инвертированными V-образными конфигурациями хвостового оперения типа чайка, имеющий для создания горизонтальной тяги в комбинированной СУ четыре КГтД с ВТВ в ПРС-114 и вертикальной тяги в ДПНС-Х2 два ДНВ или подъемной силы соответственно с работающими или зафиксированными ДЛК ДНВ, представляет собой конвертоплан двухвинтовой поперечной схемы с ВКПС и IIPC-R4, изменяющий свою полетную конфигурацию только благодаря изменению условий работы и трансформации ДНВ посредством того, что набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно передние кромки наступающих лопастей обоих ДНВ и зафиксированных их ДЛК, увеличивающих несущую способность ВКПС в конфигурации реактивного самолета. Трансформация (morphing) лопастей ДНВ, изменяющая условия их работы в полетной конфигурации вертолета, крылатого автожира или реактивного самолета соответственно при выполнении технологии ВВП и зависании, их авторотации или фиксации ДЛК ДНВ на концах ВКПС позволит самолетам-вертолетам оптимизировать эксплуатационные характеристики в различных режимах их полета, увеличить скорость и дальность полета и, как следствие, повысить топливную эффективность. Поэтому для реализации данных эксплуатационных характеристик необходимо исследовать индивидуальные принципы трансформации лопастей ДНВ, такие как преобразование на режимах перехода с вертолета в конфигурацию самолета - одновременный поворот наружу от оси симметрии лопастей двух поперечных ДНВ и последующей их жесткой фиксации, увеличивая в 1,68 раза удлинение (λ) ВКПС и образуя, снижая индуктивное сопротивление, аэродинамические поверхности, будь то с помощью синхронного поворота лопастей ДНВ в горизонтальной плоскости для преобразование их в ДЛК ДНВ, но и с использованием новейших композиционных материалов, т.к. совместно это обеспечит требуемый уровень усовершенствований, которые, имея новизну, изначально являются инновационными и передовыми. При широком использовании в СУ перспективных ВРСВ высотных КГтД на базе ТВаД, выполненных в виде двухконтурных двигателей с ВТВ, в конструкции последних, используя турбины ТРДД от Д-30ДКП, позволит весьма сократить сроки их освоения.
Несомненно, с течением времени широкое использование в СУ ВТВ в ПРС-R2 позволит добиться повышения скорости и дальности полета в сравнении с конвертопланом V-22 «Osprey», что немаловажно для освоения как ВРСВ-2,6, так и для без аэродромного базирования тяжелого реактивного самолета-вертолета (ТРСВ), снабженного в СУ двумя вертолетными ТВаД типа ПД-12 мощностью по 10000 л.с. Использование последних при диаметре двух ДНВ Dднв=20,87 м (что в 1,53 раза меньше, чем у вертолета Ми-26), особенно, в ТРСВ-11,0 позволит при взлетном его весе 44 тонны и удельной нагрузке на мощность 2,2 кг/л.с. достичь скорости 540/770 км/ч, дальности полета до 2795/4174 км и топливной эффективности 24,85/31,28 г/пас⋅км в полетной конфигурации реактивного самолета/крылатого автожира при его ЦН=11,0 тонн. 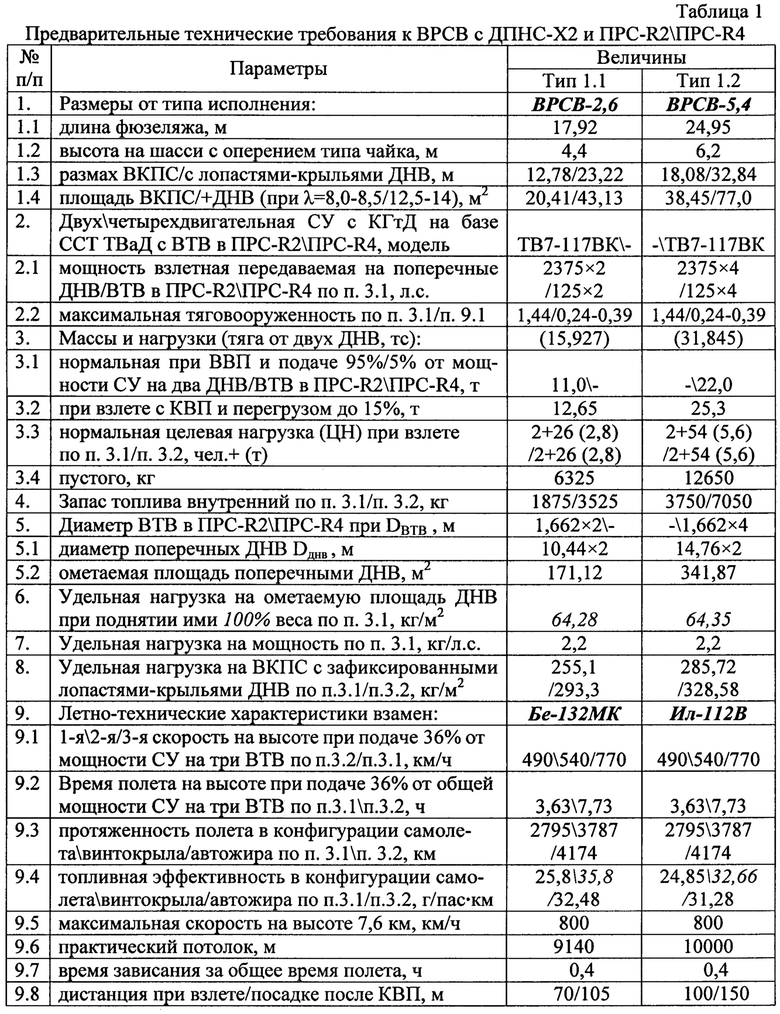
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ САМОЛЕТОМ-ВЕРТОЛЕТОМ | 2018 |
|
RU2710317C1 |
| ГИБРИДНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2706430C1 |
| МАЛОЗАМЕТНАЯ АВИАЦИОННО-РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2725372C1 |
| МАЛОЗАМЕТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2722609C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ | 2019 |
|
RU2708782C1 |
| БЕСПИЛОТНЫЙ УДАРНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2733678C1 |
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ СИСТЕМ КОРАБЕЛЬНО-АВИАЦИОННЫХ РАКЕТНЫХ | 2020 |
|
RU2748042C1 |
| АВИАЦИОННО-РАКЕТНАЯ УДАРНАЯ СИСТЕМА | 2019 |
|
RU2721803C1 |
| БЕСПИЛОТНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2699513C1 |
| БЕСПИЛОТНЫЙ ТРАНСЗВУКОВОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2711451C1 |
Изобретение относится к области авиации и может быть применено в конструкции винтокрылых летательных аппаратов. Высокоскоростной реактивный самолет-вертолет (ВРСВ) содержит на концах крыла двухвинтовую несущую систему, двигатели силовой установки (СУ), передающие крутящий момент через главный редуктор и соединительные валы на несущие винты (НВ), хвостовое оперение и трехопорное убирающееся колесное шасси. ВРСВ в интегральной аэродинамической схеме снабжен двумя или четырьмя комбинированными газотурбинными двигателями (КГтД), установленными по обе стороны от оси симметрии в подкрыльных/надкрыльных гондолах, интегрированных в корневых частях крыла. КГтД выполнены в виде двухконтурных двигателей, имеющих внешний контур с выносным турбовентилятором (ВТВ) и внутренний контур со свободной турбиной, снабженной передним выводом вала для отбора мощности через муфты сцепления на входные валы Т-образных в плане промежуточных редукторов, перераспределяющих взлетную мощность СУ между двумя двухлопастными НВ (ДНВ) и двумя соосными или однорядными ВТВ. Обеспечивается повышение скорости и дальности полета, упрощение управления по тангажу и курсу при выполнении ВВП и зависания. 2 з.п. ф-лы, 1 табл., 3 ил.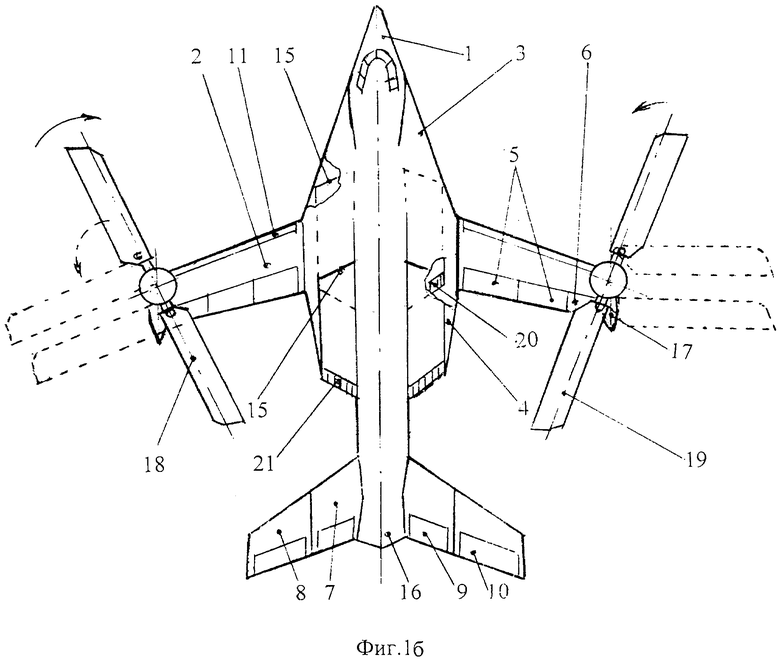
1. Высокоскоростной реактивный самолет-вертолет, содержащий на концах крыла двухвинтовую несущую систему, двигатели силовой установки (СУ), передающие крутящий момент через главный редуктор и соединительные валы на НВ, хвостовое оперение и трехопорное убирающееся колесное шасси, отличающийся тем, что он в интегральной аэродинамической схеме снабжен как двумя или четырьмя комбинированными газотурбинными двигателями (КГтД), установленными по обе стороны от оси симметрии в подкрыльных/надкрыльных гондолах, размещенных в корневых частях крыла соответственно под передними/над задними его наплывами по одному или попарно один над другим так, что нижние из них сдвинуты вперед по полету и интегрированы с вихреобразующими передними наплывами, имеющими угол стреловидности и атаки отличными от крыла, увеличивающими на больших углах атаки несущую его способность, распространяющимися от передней кромки высокорасположенного крыла и, отклоняясь к носовой части фюзеляжа, образуют V-образную в плане конфигурацию, выполненными в виде двухконтурных двигателей, имеющих внешний и внутренний контуры соответственно с выносным турбовентилятором (ВТВ) и свободной силовой турбиной, снабженной передним выводом вала для отбора мощности и ее передачи через муфту сцепления на входные валы двух или четырех Т-образных в плане промежуточных редукторов, перераспределяющих взлетную мощность СУ между двухлопастными НВ (ДНВ) в симметрично-сбалансированной двухвинтовой поперечно-несущей схеме (ДПНС-Х2) и двумя или четырьмя соосными или однорядными ВТВ, имеющими лопатки с большой их круткой, работающие по тянущей схеме в соответствующих подкрыльных/надкрыльных гондолах, размещенных при виде спереди под левым и правым инвертированными V-образными конфигурациями хвостового оперения типа чайка, внутренние и внешние стреловидные секции из которых соответственно снабжены рулями направления и высоты, используются совместно с ДНВ, создавая в пропульсивно-реактивной системе (ПРС-R2 или ПРС-R4) маршевую тягу синхронно горизонтально назад и параллельно оси симметрии при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, так и высокорасположенным крылом прямой или обратной стреловидности (ВКПС или ВКОС), имеющим угол χ%=+20° или χ=-20° стреловидности по передней кромке, предкрылки, развитые закрылки и элероны, большое (λ=7,5-8,5) удлинение и размах в  или
или  раза больше диметра (D) ДНВ и смонтированным с отрицательным углом (ϕ) поперечного V, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда оба ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно передней кромке левой и правой консолей ВКПС/ВКОС или по оси симметрии, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой/обратной или нулевой стреловидностью по передним кромкам ДЛК ДНВ, образуя с ВКПС/ВКОС равновеликую стреловидность χ=+20°/χ=-20° или χ=0°, организуют синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и размещены в плане параллельно передней кромке ВКПС/ ВКОС для горизонтального полета в конфигурации реактивного самолета с ПРС-R2 или ПРС-R4 и системой ступенчатых крыльев (ССК), образующей большое (λ=12,5-14,5) ее удлинение и включающей при виде спереди с ярусным размещением на концах консолей ВКПС/ВКОС и наружу от них зафиксированные ДЛК левого и правого ДНВ, но и обратно, при этом в каждой передней/задней паре КГтД или в двух передних с двумя задними КГтД каждый Т-образный в плане промежуточный редуктор, имеющий выходные валы, продольный из которых через муфту сцепления передает потребную мощность на ВТВ в IIPC-R2 или ПРС-R4, а поперечный синхронизирующий вал вращательно связан с Т-образным в плане передним/задним или передним с задним объединительным редуктором, передающим через муфту сцепления продольным валом крутящий момент на передний/задний Т-образный или центральный крестообразный в плане главный редуктор, размещенный по оси симметрии соответственно зеркально к объединительному редуктору или спереди и сзади главного редуктора, передает потребную мощность посредством двух поперечных валов, проложенных в консолях крыла и вращательно связанных с угловыми вертикальными редукторами ДНВ, выходные валы которых размещены на поперечной оси, проходящей в плане через центр масс, причем на режимах ВВП и зависания полная компенсация реактивного крутящего момента в ДПНС-Х2 от работающих ДНВ, выполненных с автоматом перекоса и жестким креплением их лопастей, создается противоположным направлением вращения левого и правого ДНВ, только по часовой и против часовой стрелки, а изменение балансировки по тангажу, крену и курсу обеспечивается изменением соответствующего циклического шага и дифференциальным изменением тяги общего шага двух ДНВ соответственно, при этом внешние секции левой и правой инвертированной V-образной конфигурации хвостового оперения типа чайка смонтированы горизонтально или параллельно соответствующей консоли ВКПС/ВКОС.
раза больше диметра (D) ДНВ и смонтированным с отрицательным углом (ϕ) поперечного V, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда оба ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно передней кромке левой и правой консолей ВКПС/ВКОС или по оси симметрии, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой/обратной или нулевой стреловидностью по передним кромкам ДЛК ДНВ, образуя с ВКПС/ВКОС равновеликую стреловидность χ=+20°/χ=-20° или χ=0°, организуют синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и размещены в плане параллельно передней кромке ВКПС/ ВКОС для горизонтального полета в конфигурации реактивного самолета с ПРС-R2 или ПРС-R4 и системой ступенчатых крыльев (ССК), образующей большое (λ=12,5-14,5) ее удлинение и включающей при виде спереди с ярусным размещением на концах консолей ВКПС/ВКОС и наружу от них зафиксированные ДЛК левого и правого ДНВ, но и обратно, при этом в каждой передней/задней паре КГтД или в двух передних с двумя задними КГтД каждый Т-образный в плане промежуточный редуктор, имеющий выходные валы, продольный из которых через муфту сцепления передает потребную мощность на ВТВ в IIPC-R2 или ПРС-R4, а поперечный синхронизирующий вал вращательно связан с Т-образным в плане передним/задним или передним с задним объединительным редуктором, передающим через муфту сцепления продольным валом крутящий момент на передний/задний Т-образный или центральный крестообразный в плане главный редуктор, размещенный по оси симметрии соответственно зеркально к объединительному редуктору или спереди и сзади главного редуктора, передает потребную мощность посредством двух поперечных валов, проложенных в консолях крыла и вращательно связанных с угловыми вертикальными редукторами ДНВ, выходные валы которых размещены на поперечной оси, проходящей в плане через центр масс, причем на режимах ВВП и зависания полная компенсация реактивного крутящего момента в ДПНС-Х2 от работающих ДНВ, выполненных с автоматом перекоса и жестким креплением их лопастей, создается противоположным направлением вращения левого и правого ДНВ, только по часовой и против часовой стрелки, а изменение балансировки по тангажу, крену и курсу обеспечивается изменением соответствующего циклического шага и дифференциальным изменением тяги общего шага двух ДНВ соответственно, при этом внешние секции левой и правой инвертированной V-образной конфигурации хвостового оперения типа чайка смонтированы горизонтально или параллельно соответствующей консоли ВКПС/ВКОС.
2. Высокоскоростной реактивный самолет-вертолет по п. 1, отличающийся тем, что на режимах ВВП и зависания каждая упомянутая свободная силовая турбина (ССТ) в каждой ее передней/задней паре или в двух передних с двумя задними КГтД выполнена с элементами цифрового программного управления, сочетающего в двухрежимной системе регулирования и управления одновременный режим ее работы как при отборе 90% или 95% свободной ее мощности на привод упомянутых ДНВ, так и при сбалансированном распределении 10% или 5% остаточной мощности на привод двух или четырех упомянутых ВТВ, создающих минимальную маршевую тягу для необходимого горизонтального поступательного полета, имеет между компрессорами низкого и высокого давления (КНД и КВД) для отбора мощности средний вывод радиального вала, направленного к оси симметрии и передающего от вала КНД, смонтированного соосно и внутри вала КВД и приводимого турбиной низкого давления, посредством конической зубчатой передачи через муфту сцепления свободную мощность от каждой упомянутой ССТ на междвигательный Т-образный редуктор, продольный выходной вал которого вдоль оси симметрии приводит крестообразный в плане промежуточный редуктор, выходные валы которого через две и одну муфты сцепления передает крутящий момент соответственно поперечными валами на соответствующие ВТВ и продольным валом на упомянутый передний/задний Т-образный или крестообразный в плане главный редуктор, при этом каждая подкрыльная/надкрыльная гондола имеет переднюю кромку левого и правого воздухозаборника ее КГтД, которая как размещена в плане параллельно передней кромке соответствующей консоли ВКПС/ВКОС, так и при виде сбоку выполнена соответственно с обратной/прямой стреловидностью, но и снабжена плоским соплом, имеющим заднюю его кромку с термопоглощающим покрытием и в плане обратную стреловидность, причем каждый угловой редуктор ДНВ имеет выходной вертикальный вал, отклоненный наружу от оси симметрии и назад по полету на соответствующие углы, которые соответственно равновелики и равновелик или равен 1/2 величине угла (ϕ) поперечного V упомянутого ВКПС/ВКОС, при этом набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей обоих ДНВ и зафиксированных соответствующим образом упомянутых их ДЛК, причем высокорасположенная хвостовая балка, снабженная по всей ширине фюзеляжа плоским по горизонтали поперечным эллипсовидным сечением с вогнутой нижней и утонченной ее частью, которая, образуя несущую поверхность, имеет V-образную заднюю кромку и интегрирована по внешним ее бортам с внутренними секциями каждой инвертированной V-образной конфигурации.
3. Высокоскоростной реактивный самолет-вертолет по любому из пп. 1, 2, отличающийся тем, что для экономичного высокоскоростного горизонтального полета, достигая маршевой тяговоуроженности до 0,24 и 0,39, используется 36% и 72% мощности соответственно от одного и двух или двух и четырех работающих упомянутых КГтД в СУ только на привод упомянутых ВТВ в конфигурации самолета с ПРС-R2 или ПРС-R4, при этом каждый ДНВ в синхронно-сбалансированной несущей и авторотирующей системе, включающей в упомянутом крестообразном в плане главном редукторе автоматическую коробку передач, имеющую для привода ДНВ выходные поперечные валы, каждый из которых создает по два потока: первый - взлетный с выдачей соответствующей мощности от упомянутых КГтД и созданием подъемной силы от ДНВ, второй - крейсерский в конфигурации крылатого автожира с приемом мощности от авторотации каждого ДНВ на ее соответствующую ступень, отключающую оба ДНВ от привода ССТ упомянутых КГтД, приводящую генератор и управляющую синхронным снижением и скорости их вращения, например, до 200 мин-1 или 100 мин-1, и углом атаки лопастей авторотирующих ДНВ, обеспечивающих долю увеличения в 1/3-1/4 раза требуемой подъемной силы ВКПС/ВКОС, но и плоскостью вращения лопастей ДНВ, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или высокоскоростного полета, приводящим к соответствующему 2,75-кратному сокращению общего сопротивления профиля лопастей ДНВ при их самовращении и возможности для режимов крейсерского полета расчета ВКПС/ВКОС с уменьшенной его геометрией, создающей 2/3-3/4 подъемной силы ВКПС/ВКОС от соответствующего крыла аналогичного реактивного самолета.
| ПНЕВМАТИЧЕСКОЕ НОРМАЛЬНО ЗАМКНУТОЕ РЕЛЕ СИГНАЛИЗАЦИИ | 0 |
|
SU168554A1 |
| МНОГОЦЕЛЕВОЙ ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652861C1 |
| БЕСПИЛОТНЫЙ ПАЛУБНЫЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2661277C1 |
| US 20170144746 A1, 25.05.2017. | |||

